GGk 1 Podstawowa wysokościowa osnowa geodezyjna Polski
Wysokościową osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie elementów tych sieci (linii niwelacyjnych) powinno być możliwe równomierne na obszarze całego kraju.
Dokładność osnowy charakteryzuje średni błąd pomiaru niwelacji, po wyrównaniu (mo).
Rodzaj osnowy |
Technika pomiaru |
Klasa |
mo |
Podstawowa |
Niwelacja precyzyjna |
I |
±1,0 |
Służy do nawiązania osnowy szczegółowej i do celów badawczych.
Składa się z punktów niwelacji precyzyjnej I i II klasy.
Osnowę podstawową stanowią sieci jednorzędowe, nawiązane do przynajmniej 3 punktów wyższych klas i tak podstawową osnowę II klasy nawiązuje się do osnowy podstawowej I klasy.
Punkty osnowy podstawowej są w przybliżeniu równomiernie rozmieszczone na terenie kraju.
Stabilizacja - punkty podstawowej osnowy wysokościowej powinny być stabilizowane w terenie trwałymi znakami wysokościowymi i w sposób i miejscach gwarantujących ich długoletnie użytkowanie. W osnowie podstawowej do stabilizacji stosuje się znaki podziemne - repery osadzone są pod powierzchnią ziemi. Szczególnymi znakami podziemnymi są znaki wiekowe stabilizowane, jako 3-punktowe grupy w sieci niwelacji I klasy.
WYSOKOŚCIOWA
Wysokościową osnowę geodezyjną stanowi usystematyzowany zbiór punktów, których wysokość w stosunku do przyjętej powierzchni odniesienia została określona, przy zastosowaniu techniki geodezyjnej.
Ze względu na rolę i znaczenie dla opracowań geodezyjno - kartograficznych i gospodarki narodowej, osnowa wysokościowa dzieli się na osnowę podstawową, szczegółową i pomiarową.
Osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie elementów tych sieci (linii niwelacyjnych) powinno być możliwe równomierne na obszarze całego kraju.
Osnowa szczegółowa, o niższej dokładności niż osnowa podstawowa, stanowi jej zagęszczenie, przy czym stopień zagęszczenia powinien być zróżnicowany w zależności od intensywności zagospodarowania terenu,.
Osnowa pomiarowa, o niższej dokładności niż osnowa szczegółowa, stanowi jej zagęszczenie. Tworzą ją - prócz punktów niwelacyjnych - również punkty osnowy poziomej, których wysokości zostały określane metodą niwelacji geometrycznej, trygonometrycznej lub tachimetrii. Dokładność, stopień zagęszczenia i sposób rozmieszczenia punktów powinny być dostosowane do konkretnych zadań geodezyjno - kartograficznych i przyjętej technologii ich realizacji.
Przyjmuje się następującą odpowiedniość między rodzajem osnowy, techniką jej pomiaru i klasą tego pomiaru:
a dopuszczalnej wielkości tego błędu są następujące:
Osnowę wysokościową podstawową i szczegółową tworzą sieci zakładane jako jednorzędowe. Przypadki stosowania drugiego rzędu mogą być dopuszczone przy dodatkowych dogęszczeniach sieci, wykonywanych do czasu ponownego wyrównania całej sieci danej klasy w poligonie wyższej klasy.
Sieci każdej klasy, prócz I klasy, powinny być nawiązywane wielopunktowo (minimum 3 - 4 punkty) do sieci wyższych klas, przy czym rozmieszczenie punktów nawiązania powinno być możliwie samodzielne, na obrzeżu sieci nawiązywanej.
Wysokości punktów osnowy wysokościowej wszystkich klas odniesione są do poziomu zera mareografu w Kronsztadzie i wyznaczane w systemie wysokości normalnych. Poprawki wynikające z systemu wysokości normalnych wprowadzane są do wyników pomiarów osnowy podstawowej.
Osnowę wysokościową tworzą sieci niwelacji, których elementami konstrukcyjnymi są:
- poligony niwelacyjne (zamknięte lub otwarte) utworzone z linii (ciągów) niwelacyjnych,
- linie (ciągi) niwelacyjne, utworzone z odcinków niwelacyjnych, łączące punkty węzłowe sieci,
- odcinki niwelacyjne, łączące dwa sąsiednie znaki wysokościowe danej linii niwelacyjne
Wszystkie punkty podstawowej i szczegółowej osnowy wysokościowej powinny być stabilizowane w terenie trwałymi i stabilnymi znakami wysokościowymi, w sposób i w miejscach zapewniających ich długoletnie użytkowanie.
Punkty osnowy wysokościowej podlegają ewidencji, którą prowadzą:
a) centralny ośrodek dokumentacji geodezyjno - kartograficznej - w zakresie osnowy podstawowej kraju,
b) wojewódzkie ośrodki dokumentacji geodezyjno - kartograficznej - w zakresie osnowy podstawowej i szczegółowej na obszarze województwa,
c) rejonowe ośrodki dokumentacji geodezyjno - kartograficznej - w zakresie osnowy szczegółowej oraz zastabilizowanych punktów osnowy pomiarowej na obszarze objętym działaniem ośrodka.
Podstawowa osnowa wysokościowa służy do wyznaczania wysokości punktów wykorzystywanych dla celów gospodarczych, obronnych i naukowo-badawczych.
Podstawowa osnowa wysokościowa, tj. sieć niwelacji I i II klasy, mierzona metodą niwelacji precyzyjnej, stanowi oparcie dla osnowy szczegółowej.
Sieć niwelacji I klasy tworzą linie sieci międzynarodowej (JWSN - Jednolita Wysokodokładna Sieć Niwelacyjna) oraz linie jej dogęszczenia o przeciętnej długości ok. 50 km i maksymalnej długości 90 km. Linie mogą być dzielone na sekcje, mierzone przez jeden zespół.
Sieć niwelacji II klasy tworzą linie nowo mierzone lub adaptowane o przeciętnej długości ok. 25 km i maksymalnej długości 35 km, a na terenach intensywnie zagospodarowanych o przeciętnej długości ok. 8 km i maksymalnej długości 12 km.
Długości odcinków niwelacji I i II klasy powinny wynosić:
- na terenach intensywnie zagospodarowanych od 0,5 do 1 km,
- na pozostałych terenach nie powinny być większe niż 3 km w przypadku znaków istniejących, a 2 km - w przypadku osadzania nowych znaków.
Do wyników pomiarów niwelacji I klasy wprowadzane są następujące poprawki: poprawka łat, termiczna, ze względu na dobowe zmiany kierunku linii pionu spowodowane przez Księżyc i Słońce oraz oba człony poprawki normalne, tj. poprawki ze względu na nierównoległość powierzchni ekwipotencjalnych.
Do wyników niwelacji II klasy wprowadza się: poprawkę łat, termiczną i normalną, przy czym:
a) w przypadku adaptacji dawnych pomiarów, poprawka termiczna może nie być wyznaczona, jeśli brak jest danych wyjściowych dla jej wyznaczenia,
b) w uzasadnionych technicznie przypadkach w terenach nizinnych może nie być wprowadzany II człon poprawki normalnej.
Pomiar niwelacji precyzyjnej, a szczególnie pomiar niwelacji I klasy, powinien być wykonywany w odpowiednich warunkach atmosferycznych (temperatura od 0°C do +25°C, wiatr o prędkości mniejszej niż 6 m/s), przy dobrej widoczności spokojnego obrazu podziału łat, po gruncie lub nawierzchni zapewniających stabilność statywu i łat.
Każdy odcinek powinien się składać z parzystej liczby stanowisk, tak by łata wyjściowa - stawiana na reperze początkowym - była też obserwowana na reperze końcowym danego odcinka. Przy pomiarze odcinka w dwu kierunkach, łaty wyjściowe powinny być różne.
§ 59.
Na kolejnych stanowiskach nogi statywu powinny być ustawiane w sposób przemienny (obrót o 180o).
Kliny powinny być osadzane co najmniej na 5 minut przed pomiarem danego stanowiska.
Długość celowej, tj. odległość od instrumentu do łaty, powinna być w zasadzie zawarta dla niwelacji I klasy w granicach od 8 do 35 m, a dla niwelacji II klasy - do 40 m.
W warunkach terenu górzystego celowe nie mogą tyć krótsze od 5 m.Różnica długości celowych na danym stanowisku nie może być większa niż 0,4 m dla niwelacji I klasy, oraz 0,5 m dla niwelacji II klasy.
Linia celowa powinna przebiegać na wysokości ok. 1,5 m nad powierzchnią terenu. W terenach falistych - minimum 0,8 m. Celowa nie powinna przebiegać blisko obiektów wydzielających ciepło (refrakcja, wibracja).
§ 74.
Sieci niwelacji I i II klasy powinny być wyrównywane metodą ścisłą, przy zachowaniu warunku [pv2] = min. Wagi (p) wyników pomiaru poszczególnych linii powinny być odwrotnie proporcjonalne do kwadratu średniego błędu ich pomiaru, lub - przy podobnych wartościach średniego błędu 1 km linii - odwrotnie proporcjonalne do ich długości.
Szczegółowa osnowa wysokościowa, tj. sieć niwelacji III i IV klasy, mierzona metodą niwelacji technicznej, stanowi oparcie dla osnowy pomiarowej i służy do wyznaczenia wysokości punktów wykorzystywanych dla celów gospodarczych i obronnych.
GGk2 Podstawowa pozioma osnowa geodezyjna Polski
Osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie ich powinno być równomierne na obszarze całego kraju. Osnowa ta służy do badania kształtu i wymiarów Ziemi oraz do nawiązania i wyrównania osnów szczegółowych w państwowym układzie współrzędnych i państwowym układzie wysokości.
Powinna posiadać strukturę powierzchniowej sieci kątowo - liniowej, wyznaczonej na podstawie pomiarów geodezyjnych, astronomicznych i grawimetrycznych.
Charakteryzuje się najwyższą dokładnością oraz najmniejszym zagęszczeniem i składa się z rzadko, ale równomiernie rozmieszczonych punktów 1/60 km2.
Wymaganą dokładność do niedawna wyrażono za pomocą średniego błędu względnego długości boku po wyrównaniu sieci, który nie powinien przekraczać wartości 5*10-6 (5mm/km) zaś wg nowej instrukcji G-2 miarą dokładności osnowy podstawowej jest błąd położenia punktu po wyrównaniu mp ≤ 0,05 m.
Stabilizacja - trójpoziomowa a w przypadku ustalania punktów na budynkach stałych lub na podłożu skalnym dopuszcza się stabilizację jednopoziomową.
Osnowę podstawową znajdującą się na obszarze Polski powiązano z osnową europejską EUREF za pośrednictwem jej polskiej części EUREF-POL złożonej z 11 punktów tworzących sieć zerowego rzędu.
Osnowa podstawowa, stanowiąca w całości klasę I obejmuje:
sieć geodezyjną (EUREF-POL) złożoną z 11 punktów, tworząca sieć zerowego rzędu
sieć POLREF zawierającą 348 punktów, stanowiąca zagęszczenie sieci EUREF-POL, tworząca sieć pierwszego rzędu.
Punkty istniejącej sieci astronomiczno -geodezyjnej (SAG), sieci wypełniającej (SW)
GGk 3 Szczegółowe osnowy poziome Polski
Pozioma osnowa szczegółowa stanowi rozwinięcie osnowy podstawowej, przy czym stopień zagęszczenia punktów powinien być zróżnicowany w zależności od charakteru terenu.
Służą do nawiązania i wyrównania osnów pomiarowych, zdjęć fotogrametrycznych i numerycznych modeli terenu w państwowym układzie współrzędnych i wysokości, oparcia pomiarów syt - wys dla opracowań wielkoskalowych,
Dokładność określenia położenia punktów poszczególnych klas charakteryzują błędy średnie po wyrównaniu:
Rodzaj osnowy |
Klasa |
Błąd położenia punktu względem punktów nawiązania mp |
|
|
|
Metody |
|
|
|
klasyczne |
satelitarne |
Szczegółowa |
II |
mp 0,05 m |
mp 0,03 m
|
|
III |
mp 0,10 m
|
mp 0,07 m
|
Zagęszczenie osnowy szczegółowej II klasy:
- 1pkt/0,8km2 dla terenów zainwestowanych
- 1pkt/srednio 1,5 km2 dla terenów rolnych, w zależności od potrzeb zagospodarowania terenu
- 1pkt/12km2 dla zwartych kompleksów leśnych
Struktura:
- sieci powierzchniowe,
- sieci kątowo-liniowe,
- sieci wektorowe GPS lub sieci mieszane (zintegrowane).
Stabilizacja:
-dwupoziomowa,
-jednopoziomowa,
-wieloznakowa - co najmniej 3 znaki scienne
Osnowa szczegółowa III klasy stanowi zbiór punktów będących dalszym rozwinięciem osnowy II klasy. Służy do nawiązania osnowy pomiarowej i wykonania szczegółowych pomiarów geodezyjnych.
Zagęszczenie osnowy szczegółowej III klasy:
1pkt/srednio 15 km2 dla terenów intensywnie zainwestowanych
1pkt/srednio 30 km2 dla terenów rolnych w zależności od potrzeb zagospodarowania terenu
1pkt/srednio 80 km2 dla terenów zwartych kompleksów leśnych
Struktura:
- sieci liniowe,
- pojedyncze punkty,
- grupy punktów,
- sieci powierzchniowe
Stabilizacja:
- wieloznakowa za pomocą znaków ściennych min 3 znaki dla terenów zainwestowanych
- za pomocą znaków z tworzyw sztucznych lub przyjęcie istniejących znaków na terenach niezainwestowanych.
Poziomą osnowę geodezyjną stanowi usystematyzowany zbiór punktów, których wzajemne położenie na powierzchni odniesienia zostało określone przy zastosowaniu techniki geodezyjnej.
Ze względu na rolę i znaczenie dla opracowań geodezyjno-kartograficznych, pozioma osnowa geodezyjna dzieli się na osnowę podstawową, szczegółową i pomiarową.
osnowę podstawową stanowią punkty wyznaczone w sieciach geodezyjnych o najwyższej dokładności, przy czym rozmieszczenie ich powinno być równomierne na obszarze całego kraju
osnowa szczegółowa stanowi rozwinięcie osnowy podstawowej, przy czym stopień zagęszczenia punktów powinien być zróżnicowany w zależności od charakteru terenu
osnowa pomiarowa stanowi rozwinięcie osnowy szczegółowej, przy czym dokładność, stopień zagęszczenia i sposób rozmieszczenia powinny być dostosowane do konkretnych zadań geodezyjno - kartograficznych i przyjętej technologii ich realizacji.
Pod względem dokładności wyznaczenia położenia punktów, podstawowa i szczegółowa osnowa dzieli się na trzy klasy, oznaczone cyframi rzymskimi. Punkty osnowy podstawowej zalicza się do I klasy, a punkty osnowy szczegółowej do II i III klasy. Dokładność określenia położenia punktów poszczególnych klas charakteryzują następujące błędy średnie po wyrównaniu:
klasa |
przeciętny błąd względny długości boku |
błąd położenia punktu względem punktów nawiązania |
I II III |
md : d 5 · 10 -6 - - |
- mp 0,05 m mp 0,10 m |
Błędy średnie należy obliczać przy założeniu bezbłędności punktów nawiązania. Wszystkie punkty osnowy podstawowej i szczegółowej powinny posiadać współrzędne obliczone w państwowym układzie współrzędnych oraz być zaklasyfikowane do jednej z tych klas.
Dla celów specjalnych wyodrębniona zostaje sieć triangulacji państwowej oraz wybrane punkty osnowy szczegółowej. Sieć ta dzieli się na cztery klasy, oznaczone cyframi arabskimi.
Wszystkie punkty podstawowej i szczegółowej osnowy poziomej powinny być stabilizowane w terenie znakami geodezyjnymi, w sposób i w miejscach zapewniających ich długoletnie przetrwanie. Osadzone w terenie znaki punktów powinny być przekazywane pod ochronę osobą lub instytucjom władającym nieruchomością, na której założono punkt.
Sieci geodezyjne, wchodzące w skład państwowej i szczegółowej osnowy poziomej, zakłada się na podstawie zatwierdzonej dokumentacji projektowej.
Do I klasy zalicza się punkty wyznaczone w sieci astronomiczno - geodezyjnej i sieci wypełniającej,
Osnowę I klasy stanowi zbiór punktów osnowy podstawowej, które wyznacza się w celu nawiązania osnów niższych klas, dla zaspokojenia potrzeb gospodarczych i obronnych, a także badań naukowych oraz współpracy międzynarodowej.
Osnowa I klasy powinna posiadać strukturę powierzchniowej sieci kątowo - liniowej, wyznaczonej na podstawie pomiarów geodezyjnych, astronomicznych i grawimetrycznych.
Stopień zagęszczenie osnowy I klasy powinien wynosić, co najmniej 1 punkt na 60 km2
W skład osnowy I klasy wchodzą:
sieć astronomiczno - geodezyjna, która powinna posiadać:
a/ przeciętną odległość między sąsiednimi punktami ok. 20 km,
b/ odpowiednio rozmieszczone elementy liniowe, punkty Laplacea i punkty niwelacji astronomiczno-grawimetrycznej
c/ średni błąd kąta po wyrównaniu nie większy od 0,7" /2,2cc/, a średni błąd względny długości boku nie większy od 3 · 10-6
Przy zakładaniu / modernizowaniu/ sieci należy stosować najnowsze rozwiązania, wynikające z rozwoju nauki i techniki.
sieć wypełniająca, która powinna posiadać:
a/ przeciętną odległość między sąsiednimi punktami ok. 7 km,
b/ średni błąd kąta po wyrównaniu nie większy od 1,2" /3,7cc/ a średni błąd względny długości boku nie większy od 5.10-6.
Punkty pierwszej klasy należy stabilizować trójpoziomowo, centrycznie z błędem nie większym niż 0,005 m.
W przypadkach ustalenia punktów na budynkach stałych lub na podłożu skalnym, dopuszcza się stabilizowanie punktów jednopoziomowo.
Sieci I klasy powinny być wyrównane według metod i zasad ustalonych w wyniku badań naukowych. Wyrównanie to powinno być przeprowadzone jednocześnie dla całej osnowy I klasy
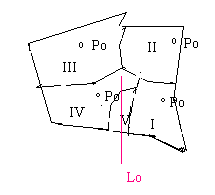
Do II klasy zalicza się punkty wyznaczone w sieciach: triangulacyjnych, poligonotriangulacyjnych i powierzchniowych sieciach kątowo-liniowych, spełniające kryteria dokładności o ile spełnione są dodatkowo następujące warunki:
- konstrukcji geometrycznej wyznaczającej położenie punktu II klasy powinny występować co najmniej dwa niezależne wyznaczenia tego punktu przy czym:
a/ kąt /β/ przecięcia się każdej niezależnej pary miejsc geometrycznych określających położenie wyznaczanego punktu powinien wynosić od 450o do 135o a stosunek długości odcinków l określonych w punktach b, c i d nie powinien być większy od 3:1 - patrz rysunek :
b/ przy wcięciu wprzód miejscami geometrycznymi określającymi położenie wyznaczanego punktu są kierunki zewnętrzne /celowe w przód / a długości odcinków l równe są długościom celowych w przód;
c/ przy wcięciu kątowym wstecz jako miejsca geometryczne określające położenie wyznaczonego punktu należy przyjmować styczne w punkcie wyznaczanym do okręgu kół przechodzących przez dwa punkty celu , przy czym długości odcinków l są równe stosunkom iloczynów długości celowych wstecz do odległości między punktami celu;
d/ przy pomiarze liniowym jako miejsce geometryczne określające położenie wyznaczanego punktu należy przyjmować prostopadłą do mierzonego boku zaś jako odcinek l pomierzoną długość boku.
2. Na terenach kompleksów leśnych wyjątkowo dopuszcza się wyznaczenie punktów II klasy metodą poligonową ciągami dwupunktowymi obustronnie dowiązanymi.
Poziome nawiązanie geodezyjnie sieci II i III klasy powinno być wykonane do punktów wyższej klasy. Nawiązanie powinno być wielopunktowe / co najmniej trzy punkty/. Punkty nawiązania powinny być rozmieszczone równomiernie na obszarze całej sieci i możliwie w taki sposób, aby jak najmniejsza liczba punktów wyznaczenia znajdowała się poza wielobokiem, utworzonym przez skrajne punkty nawiązania.
Nawiązania poziome i wysokościowe należy wykonywać między punktami osnowy geodezyjnej położonymi w odległości:
- w terenie odkrytym do 300m
- w terenie zabudowanym lub zalesionym do 50m
Nawiązanie geodezyjne punktu bliskiego powinno być wykonane w sposób umożliwiający wyznaczenie jego współrzędnych i wysokości z kontrolą pomiaru i obliczeń.
1. Osnowę II klasy stanowi zbiór punktów będących rozwinięciem osnowy I klasy które zakłada się w celu nawiązania osnowy III klasy oraz zwiększenia liczby wysokodokładnych punktów geodezyjnych, wykorzystywanych do różnorodnych prac geodezyjnych związanych z zaspokojeniem potrzeb gospodarczych i obronnych.
2. Punkty osnowy II klasy wyznacza się zakładając powierzchniowe kątowo-liniowe, sieci triangulacyjne lub poligonotriangulacyjne;
Stopień zagęszczenia osnowy II klasy /łącznie z punktami I klasy/ zaleca się aby wynosił:
- 1 punkt na 1 - 2 km2 na terenach intensywnie zainwestowanych
- 1 punkt na 2 - 8 km2 na terenach rolnych w zależności od potrzeb zagospodarowania terenu oraz ekonomiki stosowanych technologii
- 1 punkt na ok. 12 km2 na terenach kompleksów leśnych
"Nawiązanie poziomo istniejącego bliskiego punktu osnowy /27/ do nowo zakładanego punktu osnowy II klasy powinno być wykonane z dokładnością zapewniającą wyznaczenie współrzędnych z błędem średnim nie większym od:
0,03 m - w przypadku punktów sieci triangulacyjnej
0,10 m - w przypadku innych punktów osnowy poziomej oraz punktów podstawowych osnów : wysokościowej, grawimetrycznej i magnetycznej."
Wyrównanie sieci II klasy powinno być wykonane ściśle metodą pośredniczącą.
Do obserwacji, zredukowanych ze względu na mimośrody oraz ze względu na niepoziomy przebieg celowych, należy przed wyrównaniem wprowadzić poprawki ze względu na poziom odniesienia oraz redukcje na płaszczyznę odwzorowania.
Przy jednoczesnym wyrównaniu zbioru niejednakowo dokładnych obserwacji, należy stosować odpowiadające im wagi, które ustala się jako wartości odwrotnie proporcjonalne do kwadratów średnich błędów tych obserwacji.
Do jednoczesnego wyrównania nie powinny być włączane obserwacje o błędzie średnim większym niż dwukrotna wartość błędu średniego przewidzianego dla osnowy II klasy
Przy wyrównaniu sieci II klasy należy obliczać charakterystykę dokładnościową w postaci:
błędów średnich położenia każdego punktu /mp/,
przeciętnych średnich błędów wzajemnego położenia sąsiednich punktów w sieci.
§ 73.
Wyrównanie i obliczenie wysokości punktów wyznaczonych metodą trygonometryczną należy wykonywać w nawiązaniu do punktów osnowy wysokościowej o dokładności nie mniejszej niż 10 mm /km. Metoda wyrównania powinna umożliwiać ocenę dokładności wyznaczenia wysokości punktu.
osnowę III klasy stanowi zbiór punktów będących rozwinięciem osnowy I i II klasy, służących do nawiązywania osnowy pomiarowej i wykonywania szczegółowych pomiarów geodezyjnych
Do III klasy zalicza się punkty / wyznaczone metodą aerotriangulacji analitycznej lub metodami bezpośrednich pomiarów terenowych/, których średni błąd położenia, obliczony dla punktów o najmniej korzystnych warunkach wyznaczenia w danym zbiorze / skrajne punkty bloku aerotriangulacji, punkty środkowe w ciągach poligonowych/,
Przy wyznaczaniu punktów III klasy, w zależności od stosowanej metody powinny być spełnione następujące warunki:
metoda aerotriangulacji analitycznej:
a/ punkty nawiązania i punkty wyznaczone powinny znajdować się w miejscach odsłoniętych / odległość punktu od przeszkody, zasłaniającej widoczność z góry nie powinna być mniejsza od wysokości tej przeszkody/,
b/ na każdym wyznaczanym punkcie powinny istnieć dwie wizury / ziemia-ziemia /, a w trudnych warunkach terenowych - jedna na punkty osnowy podstawowej lub szczegółowej,
c/ wszystkie punkty objęte projektem powinny być zastabilizowane przed wykonywaniem zdjęć,
d/ sygnalizacja fotogrametryczna punktów powinna być wykonana bezpośrednio przed wykonaniem zdjęć,
e/ środek znaku sygnalizacji fotogrametrycznej powinien być położony centrycznie względem centra znaku geodezyjnego z dokładnością 0,01 m,
f/ różnica pomiędzy dwoma pomiarami współrzędnych tłowych każdego punktu, po uwzględnieniu skali zdjęcia nie powinna być większa od 0,10 m.
metoda poligonizacji:
a/ ciągi powinny być zbliżone do prostoliniowych,
b/ każdy ciąg powinien być nawiązany obustronnie kątowo i liniowo,
c/ długości ciągów pojedynczych nie powinny być większe od 405 km a ciągów wyznaczających punkty węzłowe - do 3,0 km,
d/ długości boków w ciągach powinny wynosić od 150m do 600m, przy czy średnia długość boku w każdym ciągu nie powinna być mniejsza niż 300 m,
metoda wcięć:
a/ w konstrukcji geometrycznej określającej każdy punkt powinny występować, co najmniej trzy elementy wyznaczające / wg § 23 p.2/ przy czym kąt przecięcia się jednej dowolnie wybranej pary tych elementów powinien wynosić od 45o do 135o /50g - 150g/,
b/ długości elementów wyznaczających powinny wynosić od 400 m do 5 km przy czym stosunek tych elementów na każdym wyznaczonym punkcie nie powinien być większy niż 4:1,
c/ średnie pomiary kątów i długości boków w zależności od długości elementów wyznaczających, nie powinny być większe od niżej podanych:
inne metody - zgodnie z warunkami określonymi w przepisach części fakultatywnej
Wyrównanie sieci III klasy powinno być wykonane metodą najmniejszych kwadratów, przy czym w przypadku stosowania bezpośrednich metod pomiaru powinny być wprowadzone poprawki. Przy wyrównaniu nie jednakowo dokładnych obserwacji obowiązują zasady podane w 71 /z uwzględnieniem odpowiednich dla osnowy III kl. wartości błędów średnich/.
Punkty III klasy przewidziane do adaptacji i posiadające współrzędne w innym układzie niż przyjęte dla danego opracowania, powinny być ponownie wyrównane.
W przypadkach uzasadnionych względami technicznymi i ekonomicznymi dopuszcza się wykonanie transformacji współrzędnych. Średni błąd współrzędnych punktu po transformacji nie powinien być większy od 0,10 m.
GGk 4. SYSTEMY WYSOKOŚCI NIWELACJI PRECYZYJNEJ W EUROPIE.
W Europie wyróżniamy trzy systemy wysokości:
-system wysokości ortometrycznych
-system wysokości normalnych
-system wysokości dynamicznych
Wysokość ortometryczna to odległość pomiędzy punktem na fizycznej powierzchni Ziemi a powierzchnią geoidy, liczona wzdłuż linii pionu.
Geoida to powierzchnia ekwipotencjalna zawierająca swobodny poziom mórz i oceanów. W każdym miejscu jest prostopadła do pionu wyznaczonego przez siłę ciężkości. Wysokość ortometryczna stanowi przybliżenie odległości punktu nad średnim poziomem morza.
Wysokość ortometryczna powstaje w wyniku niwelacyjnego dowiązania punktu do sieci niwelacyjnej (jeśli wysokości punktów tej sieci niwelacyjnej wyrażone są w systemie wysokośći ortometrycznych).
Do obliczeń wysokości ortometrycznych konieczna jest znajomość wewnętrznego pola ciężkościowego Ziemi. Ścisłe wyznaczenie przeciętnych wartości przyspieszenia siły ciężkości byłoby możliwe, gdyby znany był dokładny rozkład mas w skorupie ziemskiej lub gdyby wartości te były dostępne do pomiaru grawimetrycznego. W praktyce zakłada się jednorodność mas powierzchniowych przyjmując najprawdopodobniejszą gęstość w oklicach ciągu niwelacyjnego.
Wysokość ortometryczna posiada ścisłą i jednoznaczną interpretację geometryczną, jest to długość odcinków linii pionu rzeczywistego pola siły ciężkości mierzona od powierzchni geoidy do punktu położonego na fizycznej powierzchni Ziemi.
Jej wielkość pozwala określić nachylenia powierzchni ekwipotencjalnych w rzeczywistym polu siły ciężkości.
Wysokość normalna to odległość punktu T, znajdującego się na telluroidzie, od sferoidy, liczona wzdłuż linii pionu. Telluroida jest to powierzchnia której potencjał rzeczywisty równy jest potencjałowi normalnemu.
Wysokość normalna jest to również odległość punktu P znajdującego się na fizycznej powierzchni Ziemi od quasigeoidy, liczoną wzdłuż linii pionu. Najpierw jednak mamy wysokość normalną a potem quasigeoidę. Spadki wysokości normalnych wyznaczą nam powierzchnię zwaną quasigeoidą. Quasigeoida jest to powierzchnia nieekwipotencjalna i nie ciągła, która na powierzchni mórz i oceanów pokrywa się z geoidą, w głębi lądu odbiega nieznacznie od niej, natomiast na terenach górzystych różnica między geoidą a quasigeoidą może wynosić 1-2 m.
Wysokość normalna wprowadzona została przez M.S. Mołodieńskiego.
Aktualnie w Polsce obowiązuje system wysokości normalnych odniesiony do poziomu zera mareografu w Kronsztadzie. Jest to system wysokości Kronsztadt "86" . System ten obowiązuje w Polsce od ponad 30-tu lat.
Jako powierzchnia odniesienia w tym układzie przyjęta została quasigeoida.
Wysokości dynamiczne nie mają żadnej interpretacji geometrycznej, nie można wskazać ani punktów, ani powierzchni, których odległość znaczyłaby wysokość dynamiczną.
Punkty tej samej powierzchni poziomej mają te same wysokości dynamiczne, na przykład wody jeziora we wszystkich miejscach mają te same wysokości dynamiczne, dzieje się tak dlatego że wysokości te, nie uwzględniają nierównoległości powierzchni ekwipotencjalnych.
Ten system wysokości znajduje często zastosowanie w melioracji, przy projektowaniu związanym z budownictwem wodnym, a także przy projektach inżynierskich na bardzo dużych obszarach, czyli wtedy gdy wymagana jest duża dokładność projektowania spadków.
GGk 5. Przeliczanie współrzędnych pomiędzy różnymi układami.
Transformacja współrzędnych między układem pierwotnym i wtórnym to obliczenie współrzędnych w układzie wtórnym dla punktów, których współrzędne są tylko w układzie pierwotnym. Warunkiem koniecznym do przeprowadzenia transformacji jest znajomość związków między współrzędnymi punktów w obu układach. Związki te ujmowane są w równania transformacyjne. W równaniach tych zawsze występują współrzędne w obu układach i parametry transformacji. Transformacje można dokonać na punkty łączne (dostosowania), które posiadają współrzędne w obu układach, bądź przy wykorzystaniu znanych parametrów transformacji.
Proces transformacji na punkty łączne przebiega dwu etapowo. Na początku na podstawie odpowiedniej liczby punktów łącznych wyznacza się parametry transformacji, które później wykorzystuje się do przeliczenia współrzędnych. Punkty łączne muszą być równomiernie rozmieszczone, tak aby wszystkie punkty w układzie pierwotny znalazły się w wielokącie wyznaczonym przez punkty łączne.
Schemat przeliczenia współrzędnych kartezjańskich pomiędzy układami z różnymi elipsoidami odniesienia (np. GRS 80 na Krassowskiego).
[X, Y, Z]G => [X, Y, Z]K
XK = c11*XG + c12*YG + c13*ZG + Tx
YK = c21*XG + c22*YG + c23*ZG + Ty
ZK = c31*XG + c32*YG + c33*ZG + Tz
cii - parametry transformacji (określone w wytycznych technicznych G1.10)
Ti - przesunięcie układów
[X, Y, Z]K => [X, Y, Z]G
XG = d11*(XK - Tx) + d12*(YK - Ty) + d13*(ZK - Tz)
YG = d21*(XK - Tx) + d22*(YK - Ty) + d23*(ZK - Tz)
ZG = d31*(XK - Tx) + d32*(YK - Ty) + d33*(ZK - Tz)
dii - parametry transformacji, tworzą macierz D, która jest odwrotna do macierzy C
utworzonej z elementów cii
Schemat przeliczenia współrzędnych między układami na tej samej elipsoidzie.
np.
układ 1965 (5 stref)
układ 1942 (4 strefy 3 stopniowe, 2 strefy 6 stopniowe)
układ 1992
układ 2000 (4 strefy)
(X, Y)układu1 => B, L => (X, Y)układu2
Współrzędne z 1 układu do układu 2 można także przeliczyć bezpośrednio wykorzystując własności interesujących nas odwzorowań konstruując odpowiednie wielomiany za pomocą analitycznej funkcji zmiennej zespolonej.
Schemat przeliczenia współrzędnych z układu geodezyjnego na kartezjański i odwrotnie.
[B, L, H] => [X, Y, Z]
X = (N + H)cosB cosL
Y = (N + H)cosB sinL
Z = N(1 - e2)sinB
N - największy promień krzywizny (promień przekroju poprzecznego)
N = a / (1 - e2sin2B)1/2 , gdzie: a - duża półoś elipsoidy
e - mimośród e2 = (a2 - b2) / a2
[X, Y, Z] => [B, L, H]
L = arctg Y / X
B = arctg ( [Z + Ne2sinB] / [X2 + Y2]1/2
H = (X / cosBcosL) - N ; H = (Y / cosBsinL) - N ; H = (Z / sinB) - N(1 - e2)
Schemat przeliczenia współrzędnych z układu `65' na układ `2000'.
[X, Y]65 => [X, Y]2000
[X, Y]65 -> [B, L]Kr - przejście na współrzędne geodezyjne z wykorzystaniem funkcji
odwzorowawczych układu 65
[B, L]Kr -> [B, L, H]Kr - dodanie przybliżonej wysokości
[B, L, H]Kr -> [X, Y, Z]Kr - przeliczenie współrzędnych na układ kartezjański
[X, Y, Z]Kr -> [X, Y, Z]GRS 80 - transformacja przestrzenna
[X, Y, Z]GRS 80 -> [B, L, E]GRS 80 - przeliczenie na współrzędne geodezyjne
[B, L]GRS 80 -> [X'', Y'']2000 - wykorzystujemy funkcje odwzorowawcze układu 2000
[X'', Y'']2000 -> [X', Y']2000 - transformacja Helmerta
[X', Y']2000 -> [X, Y]2000 - korekta Hausbrandta (nie stosujemy przy przejściu 2000 -> 65)
Przeliczenie to można zrealizować także wykorzystując transformację na punkty łączne.
GGk 6. Osnowy realizacyjne - cel i zasady zakładania, pomiar i wyrównanie.
CEL
Osnowa realizacyjną zakłada się w celu wykonywania pomiarów geodezyjnych związanych z projektowaniem, budową oraz eksploatacją zakładów i obiektów. Także pomiary geodezyjne związane z tyczeniem projektów w terenie oraz robotami budowlanymi i montażowymi, należy opierać na geodezyjnej osnowie realizacyjnej. W uzasadnionych przypadkach można geodezyjną osnowę realizacyjną wykorzystać do badania przemieszczeń i odkształceń.
- Pomiary geodezyjne związane z tyczeniem projektów w terenie oraz robotami budowlanymi i montażowymi, należy opierać na geodezyjnej osnowie realizacyjnej.
- Pomiary geodezyjne związane z badaniem przemieszczeń i odkształceń należy opierać na osnowie geodezyjnej nałożonej dla tych celów. W uzasadnionych przypadkach można wykorzystać do tego celu geodezyjną osnowę realizacyjną.
Osnowy realizacyjne dzieli się na sytuacyjne i wysokościowe.
Ze względu na role i znaczenie dla prac geodezyjnych, dzieli się je na podstawową i szczegółową.
- Podstawowa osnowa realizacyjna służy do powiązania tyczonego obiektu z otaczającym go terenem i jego uzbrojeniem, wyznaczenia szczegółowej osnowy realizacyjnej oraz w miarę możliwości - do bezpośredniego wykonywania pomiarów realizacyjnych.
Podstawowa osnowa realizacyjna powinna być nawiązana geodezyjnie do punktów wcześniej nałożonych w sposób umożliwiający prawidłowe określenie nowych punktów w państwowym układzie współrzędnych lub wysokości (patrz O-1 § 8 ust. 3)
- Szczegółowa osnowa realizacyjna służy do bezpośredniego oparcia pomiarów realizacyjnych.
Pozioma osnowa realizacyjna służy do:
- lokalizacji obiektów i urządzeń
-wyznaczenia położenia osnów budowlano- montażowych
-pomiarów kontrolnych a w miarę możliwości do pomiarów inwentaryzacyjnych powykonawczych, dla celów zakładania lub aktualizacji mapy zasadniczej, pomiarów przemieszczeń i odkształceń.
Wysokościowa osnowa geodezyjna służy do:
- wyznaczenia wysokości charakterystycznych punktów realizowanych obiektów
- wyznaczenia wysokości reperów roboczych
- pomiarów kontrolnych
-pomiarów inwentaryzacyjnych
- pomiarów przemieszczeń i odkształceń budowli i jej elementów konstrukcyjnych i położenia
ZAKŁADANIE
Pozioma osnowa realizacyjna może być zakładana jako:
-osnowa będąca zagęszczeniem istniejącej na danym obszarze osnowy geodezyjnej
- osnowa lokalna
Osnowę lokalna zakłada się gdy dokładność ist. osnowy geodezyjnej jest zbyt mała w stosunku do wymagań stawianych osnowie realizacyjnej
Osnowa realizacyjna może być zakładana, jako sieci jednorzędowe i dwurzędowe.
Pozioma osnowa realizacyjna powinna być zakładana, jako:
1) sieć, w której na wartości współrzędnych punktów nie nałożono warunków równości z wartościami projektowanymi,
2) sieć, w której wartości współrzędnych punktów równe są założonym w projekcie wartościom nominalnym.
Poziome osnowy realizacyjne mogą stanowić:
- sieci powierzchniowe kątowo-liniowe (pomierzone są kąty i boki w tej sieci)
- sieci powierzchniowe liniowe (pomierzone są tylko boki)
- sieci i pojedyncze ciągi poligonowe
- układy bazowe
- punkty wcięte
Wybór rodzaju sieci należy uzależnić od:
1) charakteru tyczonego zakładu (obiektu), a w szczególności zagęszczenia obiektów,
2) ukształtowania terenu,
3) możliwości zapewnienia trwałości punktów osnowy,
4) techniki pomiarowej i obliczeniowej,
5) kształtu i rozmiarów danego obszaru,
6) możliwości automatyzacji procesu przygotowania danych do tyczenia,
7) harmonogramu robót budowlana - montażowych,
Za główne kryterium oceny dokładności wyznaczenia poziomej osnowy realizacyjnej należy przyjmować średni błąd po wyrównaniu długości najbardziej niekorzystnie położonego boku sieci.
Pomocniczymi kryteriami oceny dokładności wyznaczenia poziomej osnowy realizacyjnej są:
1) średnie błędy kierunków i kątów w sieci po wyrównaniu,
2) średnie błędy podłużne i poprzeczne punktów (na przykład średnie błędy współrzędnych),
3) długości półosi i kierunki dłuższych półosi elips błędu średniego,
4) średnie błędy położenia punktów sieci, odniesione do jej punktu głównego i kierunku głównego, przyjętych do wyrównania.
Realizacyjną szczegółową osnowę wysokościową należy zakładać jako sieci niwelacyjne nawiązane do sieci podstawowej wysokościowej osnowy realizacyjnej oraz w formie roboczych znaków wysokościowych.
Wysokości wszystkich punktów wysokościowej osnowy realizacyjnej, zarówno podstawowej jak i szczegółowej, należy wyznaczać w obowiązującym państwowym układzie wysokości, w którym wysokości H wyrażono w systemie wysokości normalnych, odniesionych do zera mareografu w Kronsztadzie.
Kryterium dokładności wyznaczenia realizacyjnej osnowy wysokościowej stanowi średni błąd niwelacji po wyrównaniu w milimetrach na 1 kilometr linii niwelcyjnej. Pomocniczym kryterium może być średni błąd wysokości mH po wyrównaniu.
Pomiar osnów realizacyjnych można wykonać za pomocą tradycyjnych metod pomiarów geodezyjnych, bądź z wykorzystaniem GPS. Należy zastosować takie metody pomiaru, które pozwolą uzyskać wymaganą dokładność. dokładność pomiaru powinna być większa od wymaganej projektem osnowy.
Wyrównanie osnów realizacyjnych odbywa się metodą najmniejszych kwadratów.
Podstawowa i szczegółowa osnowa realizacyjna mogą być sieciami niezależnymi w sensie wyrównania. W takich przypadkach współrzędne punktów sieci szczegółowej należy przetransformować na układ osnowy podstawowej uwzględniając przesunięcie układów i skręcenie osi.
Sieci realizacyjne wyrównuje się zawsze metodą najmniejszych kwadratów Gaussa ([PCV] dąży do min.) z przyjęciem najmniejszej liczby warunków nawiązania. Obliczenia prowadzimy najczęściej w układzie lokalnym związanym z głównymi osiami danej inwestycji lub innym zdefiniowanym np. przez projektanta. Ponieważ posługujemy się modelem pośredniczącym konieczne jest zdefiniowanie przynajmniej jednego punktu stałego oraz azymutu jednego z boków. Najkorzystniej, ze względu na wielkość błędów średnich położenia punktów wyznaczanych, jest wybierać punkt stały sieci w pobliżu środka ciężkości realizowanej sieci geodezyjnej.
GGk7. ODWZOROWANIA KARTOGRAFICZNE STOSOWANE W GEODEZJI.
Przekształcenie obszaru kulistego na obraz płaski nazywamy odwzorowaniem kartograficznym. Obraz powierzchni kuli przekształcony na płaszczyźnie będzie zawsze zniekształcony, ale w zależności od przyjętego rozwiązania zniekształcenia te mogą być różne. Odwzorowania:
Ze względu na rodzaj zniekształcenia dzielimy na:
-wiernokątne (równokątne lub konforemne)
-wiernoodległościowe (równoodległościowe)
- wiernopolowe (równopolowe)
- dowolne (nie zachowuje wierności żadnego z elementów)
Ze względu na rodzaj pow. odwzor. na którą rzutuje się punkty z pow. odniesienia:
- płaszczyznowe (azymutalne)
- walcowe
- stożkowe
Ze względu na położenie osi powierzchni odwzorowawczej względem osi Ziemi:
-normalne (biegunowe), gdy osie obu powierzchni pokrywają się
- poprzeczne (równikowe), gdy osie są ustawione prostopadle
- ukośne, gdy osie zajmują względem siebie położenie ukośne
Wielkość i rodzaj zniekształceń zależą od skali mapy, rodzaju odwzorowania i położenia obszaru w stosunku do punktu lub linii styczności.
Wyróżniamy odwzorowanie Gaussa-Krűgera i Qasi-stereograficzne.
Gaussa-Krugera jest to odwzorowanie równokątne, walcowe, poprzeczne.
-Obrazem południka środkowego jest odcinek linii prostej
-Południk środkowy obszaru odwzorowuje się bez zniekształceń.
-Pozostałe południki tworzą obraz symetryczny
-stosowane są wąskie pasy południkowe, najczęściej o szerokości 30 dla map wielkoskalowych lub 60 dla map maloskalowych
- szerokość pasa zalezy od przeznaczenia map i wielkości akceptowanych zniekształceń
im szerszy pas tym wieksze zniekształcenie
- zniekształcenia są wzdłuż równoległych do południka środkowego -zniekształcenia liniowe.
Quasi-stereograficzne jest to odwzorowanie równokątne, płaszczyznowe, ukośne przy czym płaszczyzna rzutów jest płaszczyzną sieczną, tzn. przecina glob ziemski na pewnej głębokości.
-obrazem południka środkowego jest odcinek linii prostej a obrazem innych południków są krzywe symetryczne względem obrazu południka środkowego.
-zniekształcenia są w postaci okręów współśrodkowych przy czym największe są w środku.
Układ „1965” zastosowano elipsoidę Krasowskiego. Obszar Polski podzielono na pięć stref posiadających niezależne układy współrzędnych. W czterech strefach zastosowano odwzorowanie Quasi-stereograficzne, natomiast w piątej, odwzorowanie Gaussa-Krűgera.
Układ 2000 wykorzystuje równokątne, walcowe, poprzeczne odwzorowanie Gaussa-Krugera. Jest związany z elipsoidą odniesienia GRS'80 i z nową siecią wykonaną przy pomocy odbiorników GPS. Obszar kraju dzieli się na 4 pasy południkowe o szerokości 30 numerowane kolejno 5, 6, 7, 8 (15o, 18o, 21o, 24o). Dla każdej z tych stref współczynnik zmiany skali w południku osiowym wynosi 0.999923.
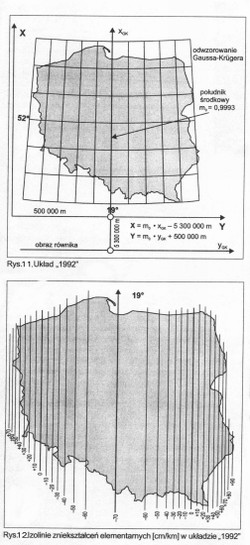
Układ 1992 wykorzystuje równokątne, walcowe, poprzeczne odwzorowanie Gaussa-Krűgera oraz elipsoidę obrotową - GRS`80 (geocentryczna). Jest jedna 10-stopniowa strefa południkowa - dla całego kraju, o południku osiowym 19° długości geograficznej wschodniej Lo = 19o. Współczynnik zniekształcenia skali : mo = 0,9993. Zniekształcenia liniowe.
GG k8. „1965” i „GUGIK 80”
UKŁAD „1965”.
stosowany do prac geodezyjnych i kartograficznych związanych z wykonywaniem mapy zasadniczej (1:5000, 1:2000, 1:1000, 1:500) i map topograficznych(1:50000,
1:25000, 1:10000, 1:5000)
elipsoidą odniesienia jest elipsoida Krasowskiego z punktem przyłożenia w Pułkowie
podzielono Polskę na 5 stref :
strefy I - IV - oparte na odwzorowaniu quasistereograficznym; mo = 0,9998
strefa V (katowicka) - odwzorowanie G-K; mo = 0,999983
w każdej strefie (I - IV) przyczepiono punkt główny i to był w danej strefie początek układu współrzędnych
przez V strefę przechodzi południk główny; Lo = 18o57'30''; jedna strefa 3-stopniowa
Układ "1965"
Układ współrzędnych "1965" wprowadzony został do opracowań kartograficznych przeznaczonych dla potrzeb gospodarczych w roku 1968. Układ "1965", oraz lokalne układy współrzędnych mogą być stosowane do dnia 31 grudnia 2009 r
Elipsoidą odniesienia jest elipsoida Krasowskiego z punktem przyłożenia w Pułkowie.
Państwowy układ współrzędnych płaskich prostokątnych nie jest układem jednolitym. Posiada on 5 stref odwzorowawczych, przy czym:
dla czterech odwzorowawczych przyjęto odwzorowanie quasi-stereograficzne (odwzorowanie płaszczyznowe ukośne, wiernokątne). Są to: strefa 1- obejmująca południowo-wschodnią część Polski; strefa 2- część północno- wschodnią; strefa 3- część północno-zachodnią; strefa 4- część południowo-zachodnią Polski.
Każde odwzorowanie quasi-stereograficzne jako wiernokątne odwzorowanie płaszczyznowe elipsoidy definiuje się, określając położenie punktu głównego (punktu styczności płaszczyzny z powierzchnią elipsoidy) oraz skalę odwzorowania w tym punkcie, będącą równocześnie skalą podobieństwa odwzorowania. W strefach 1-4 układu "1965" przyjęto skalę w punkcie głównym mo = 0,9998, tzn. zniekształcenie odwzorowawcze w tym punkcie wynosiło z założenia 20 cm/km.
dla strefy 5 przyjęto odwzorowanie Gaussa-Krügera z 3-stopniowym pasem odwzorowawczym. Strefa 5 obejmuje byłe województwo katowickie w granicach sprzed reformy administracyjnej 1975 r.
W piątej strefie odwzorowawczej rzutowania dokonano na pobocznicę walca siecznego, zatem zniekształcenia zerowe występują wzdłuż dwóch południków. Między tymi południkami zniekształcenia przybierają wartości ujemne, na zewnątrz nich zaś dodatnie.
Mapy sporządzone w państwowym układzie współrzędnych płaskich prostokątnych "1965" nie posiadają siatki kartograficznej. Sporządzone są one w prostokątnym podziale arkuszowym. Linie siatki współrzędnych płaskich prostokątnych prowadzonych w odstępach:
dla mapy zasadniczej:
Dy = 80 cm; Dx = 50 cm;
dla map topograficznych w skali 1:10 000:
Dy = 80 cm; Dx = 50 cm;
dla map topograficznych w skali 1:25 000 i 1:50 000:
Dy = 64 cm; Dx = 40 cm;
dzielą każdą strefę układu "1965" na tak zwane sekcje podziałowe. Linie podziałowe wyznaczające sekcje map są równoległe do osi x i osi y układu współrzędnych płaskich prostokątnych danej strefy. Początek podziału map na sekcje prostokątne pokrywa się z początkiem układu współrzędnych płaskich prostokątnych, przechodzącym przez punkt główny danej strefy odwzorowawczej.
Podstawą podziału na sekcje i systemu oznaczenia arkuszy mapy zasadniczej w skalach 1:5000, 1:2000, 1:1000 i 1:500 jest sekcja wielkoskalowej mapy topograficznej w skali 1:10 000.
Podstawą podziału na sekcje i systemu oznaczania arkuszy map topograficznych w skalach 1:50 000, 1:25 000, 1:10 000 jest sekcja mapy w skali 1 :100 000 o zasięgu terytorialnym Dy = 64 cm i Dx = 40 cm.
Podstawowym mankamentem układu współrzędnych "1965" jest brak możliwości sporządzania jednolitych i pełnowartościowych map obszaru całego kraju. Wynika to z faktu, że poza granicami stref odwzorowawczych błędy odwzorowawcze szybko rosną, a poza tym wzajemne skręcenie i przesunięcie układów uniemożliwia tworzenie jednolitych map obszaru całej Polski. Nawet dla obszarów znajdujących się na styku dwóch lub trzech stref zachodzi konieczność dublowania arkuszy. Powoduje to, że w układzie współrzędnych "1965" około 30% arkuszy map położonych na styku stref podlega dwu-, a czasem trzykrotnemu niezależnemu opracowaniu.
UKŁAD „GUGIK 80”.
stosowany do map przeglądowych o skalach 1: 100000 i mniejszych
oparty na odwzorowaniu quasistereograficznym elipsoidy Krasowskiego z punktem przyłożenia w Pułkowie
jest jedna strefa odwzorowawcza dla całego kraju, z punktem głównym o współrzędnych:
Φ0 = 52o10' ; λ0 = 19o10'
w którym : Xo = 500000m
Yo = 500000m
współczynnik zniekształcenia skali : mo = 0,999714
GUGiK-80 - państwowy układ współrzędnych płaskich prostokątnych przeznaczony głównie dla map w skali 1: 100 000 i mniejszych. Wykorzystano w nim jednostrefowe odwzorowanie quasi-stereograficzne z punktem styczności płaszczyzny z elipsoidą o współrzędnych Bo = 52o10'00", Lo = 19o10'00" . Współczynnik zmiany skali w tym punkcie wynosi 0.999714, a maksymalne zniekształcenie liniowe na granicach Polski wynosi ~ 93 cm/km. Układ ten znalazł zastosowanie jedynie przy opracowaniu wydawanej w latach 1980-1984 topograficznej mapy Polski w skali 1 : 100 000.
GGk9. „1992” i „2000” (oparte są na systemie EUREF-89)
UKŁAD „1992”.
stosowany dla map urzędowych (topograficznych) o skalach 1:10000 i mniejszych
elipsoidą odniesienia jest elipsoida GRS 80 (geocentryczna)
odwzorowanie G-K
X = - 5300000m na równiku, Y = 500000m na południku osiowym strefy
jedna 10-stopniowa strefa południkowa - dla całego kraju, Lo = 19o
współczynnik zniekształcenia skali : mo = 0,9993
zniekształcenia liniowe :
- 70 cm/km na południku osiowym
+ 90 cm/km na skrajach strefy
układ współrzędnych płaskich prostokątnych, oznaczony symbolem "1992", stosowany w mapach urzędowych o skali 1 : 10000 lub mniejszej. Układ ten również wykorzystuje kartograficzne równokątne odwzorowanie Gaussa-Krügera strefy elipsoidy ziemskiej na pobocznicę walca eliptycznego o osi znajdującej się w płaszczyźnie równika. Dla obszaru Polski przyjęto jedną strefę o południku osiowym 19° długości geograficznej wschodniej i współczynniku zmiany skali w tym południku wynoszącym 0.9993.
1992 - państwowy układ współrzędnych płaskich prostokątnych, stanowiący część państwowego systemu odniesień przestrzennych wprowadzonego do stosowania rozporządzeniem Rady Ministrów z dnia 08.08.2000r. Układ ten przeznaczony jest głównie dla map małoskalowych
i średnioskalowych. Wykorzystuje się w nim kartograficzne równokątne odwzorowanie Gaussa-Krügera strefy elipsoidy ziemskiej na pobocznicę walca eliptycznego o osi znajdującej się w płaszczyźnie równika. Dla obszaru Polski przyjęto jedną strefę o południku osiowym 19° długości geograficznej wschodniej i współczynniku zmiany skali w tym południku wynoszącym 0.9993. Wartości zniekształceń odwzorowawczych mieszczą się w zakresie od -70 cm/km na południku osiowym do +91 cm/km na wschodniej granicy Polski.
UKŁAD „2000”
stosowany do prac geodezyjnych i kartograficznych związanych z wykonywaniem mapy zasadniczej (1:5000, 1:2000, 1:1000, 1:500)
jest związany z nową elipsoidą odniesienia GRS 80 i z nową siecią wykonaną przy pomocy odbiorników GPS
stosuje się odwzorowanie G-K
X = 0m na równiku, Y = Yo na południku osiowym
są tylko cztery strefy 3-stopniowe południkowe
Lo = 15o, 18o, 21o, 24o
mo = 0,999923
zniekształcenia liniowe :
- 7,7 cm/km na południku osiowym
+ 7,0 cm/km na skrajach strefy
układ współrzędnych płaskich prostokątnych, oznaczony symbolem "2000", stosowany w pracach geodezyjnych i kartograficznych związanych z opracowaniem mapy zasadniczej. Układ ten wykorzystuje kartograficzne równokątne odwzorowanie Gaussa-Krügera strefy elipsoidy ziemskiej na pobocznicę walca eliptycznego o osi znajdującej się w płaszczyźnie równika. Dla obszaru Polski wyodrębniono cztery trzystopniowe strefy południkowe o południkach osiowych, których długości geograficzne wschodnie wynoszą 15 °, 18 °, 21 ° i 24 °. Dla każdej z tych stref współczynnik zmiany skali w południku osiowym wynosi 0.999923.
2000 - państwowy układ współrzędnych płaskich prostokątnych, stanowiący część państwowego systemu odniesień przestrzennych wprowadzonego do stosowania rozporządzeniem Rady Ministrów z dnia 08.08.2000r. Przeznaczony jest głównie dla map wielkoskalowych. Układ ten wykorzystuje kartograficzne równokątne odwzorowanie Gaussa-Krügera strefy elipsoidy ziemskiej na pobocznicę walca eliptycznego o osi znajdującej się w płaszczyźnie równika. Dla obszaru Polski wyodrębniono cztery trzystopniowe strefy południkowe o południkach osiowych, których długości geograficzne wschodnie wynoszą 15 °, 18 °, 21 ° i 24 °. Dla każdej z tych stref współczynnik zmiany skali w południku osiowym wynosi 0.999923, a zniekształcenia liniowe zawierają się w zakresie od -7.7 cm/km na południku osiowym do ~ +7 cm/km na brzegu każdej strefy.
Układ "1992"
Dla map topograficznych w skali 1:10 000 i mniejszych stosuje się jeden układ dla całego kraju"1992/19", w systemie GRS 80. Jest on utworzony na podstawie matematycznie jednoznacznego przyporządkowania punktów powierzchni Ziemi odpowiednim punktom na płaszczyźnie według teorii odwzorowania kartograficznego Gaussa-Krügera.
Dla wyznaczania wysokości w systemie odniesień przestrzennych "1992" stosuje się system wysokości normalnych "Kronsztad 86", w którym zostały określone wysokości punktów podstawowej i szczegółowej osnowy geodezyjnej kraju.
Układ "1992/19" określają następujące parametry:
a) południk osiowy L = 19º długości geograficznej wschodniej,
b) pas południkowy o szerokości obejmującej cały obszar kraju,
c) współczynnik zmiany skali 0,9993 w południku osiowym (założenie to ma na celu równomierny rozkład zniekształceń liniowych, od - 70 cm/km na południku środkowym do około +90 cm/km w skrajnych, wschodnich obszarach Polski)
d) punkt przecięcia się obrazu równika z obrazem południka osiowego otrzymuje współrzędną x = -5 300 000 m, a punkty leżące na południku osiowym współrzędną y = 500 000 m.
Ze względu na znaczne zniekształcenia liniowe układ nie jest rekomendowany do wielkoskalowych opracowań kartograficznych.
Układ "2000"
Dla opracowań katastralnych i przy opracowaniu mapy zasadniczej w skali 1:5 000 i skalach większych stosuje się odwzorowanie Gaussa-Krügera tworzące cztery układy współrzędnych płaskich prostokątnych, oznaczone symbolami: "2000/15", "2000/18", "2000/21" i "2000/24", w systemie GRS-80.
Współrzędne płaskie prostokątne x, y są obliczane w odwzorowaniu Gaussa-Krügera w pasach trzystopniowych o południkach osiowych:15º, 18º, 21º, 24º. Pasy ponumerowane są: 5, 6, 7, 8. Współczynnik zmiany skali równa się 0,999923 w południku osiowym.
Początkiem układu współrzędnych w danym pasie odwzorowania jest punkt przecięcia się obrazu południka osiowego z obrazem równika. Przy określaniu współrzędnych - współrzędna x pozostaje nie zmieniona, a do współrzędnej y w zależności od południka osiowego dodaje się:
5 500 000 m przy południku Lo = 15º,
6 500 000 m przy południku Lo = 18º,
7 500 000 m przy południku Lo = 21º,
8 500 000 m przy południku Lo = 24º.
Pierwsza cyfra współrzędnej y oznacza numer pasa odwzorowania.
Układ ten realizuje kompromis w rozłożeniu zniekształceń liniowych; od -7,7 cm/km na południku środkowym strefy do maksymalnie około +7 cm/km na brzegu strefy.
Mapa zasadnicza jest prowadzona w formie numerycznej z możliwością przedstawienia jej treści w formie analogowej (klasycznej). Mapę zasadniczą w formie analogowej wykonuje się w podziale sekcyjnym prostokątnym. Dla mapy zasadniczej stosuje się jednolity dla każdego pasa podział na arkusze mapy. Obszar terenu na skraju danego pasa ogranicza się do granic naturalnych lub granic władania (jednostek ewidencyjnych), tzn. z zasady nie stosuje się pasa pokrycia z sąsiednim układem współrzędnych. W miarę jednak potrzeby wynikającej z realizacji konkretnych zadań praktycznych obszar terenu na skraju danego pasa rozszerza się do dalszych granic naturalnych lub granic władania.
Podstawą do określania formatów i numeracji arkuszy mapy zasadniczej w skalach 1:5 000, 1:2 000, 1:1 000, 1:500 w podziale arkuszowym prostokątnym jest arkusz 1:10 000 o wymiarach 5 km na 8 km.
GGk 10. Systemy informacji przestrzennej i ich zastosowanie w g.n.
SIP - System Informacji Przestrzennej jest to informatyczny system do pozyskiwania, przetwarzania i udostępniania informacji o otaczającej nas przestrzeni.
To zbiór danych, w których zawarte są informacje przestrzenne o obiektach wraz z informacją o ich geometrycznych właściwościach, o przestrzennych relacjach oraz o danych opisowych.
Rozróżniamy podgrupy SIP: GIS - system informacji geograficznej, SIT- system informacji o terenie, BIS - system informacji o budynkach oraz SIS - specjalistyczne systemy informacyjne
GIS odnosi się do opracowań wielkoskalowych, takich jak system zarządzania i monitoringu dróg w kraju. Taki system swoim zasięgiem obejmuje najczęściej obszar kontynentu, kraju, regionu lub województwa. To grupa systemów opartych na relacjach pomiędzy informacjami związanymi z przyrodą i zachodzącymi w niej zjawiskami, gospodarką oraz wykorzystaniem zasobów naturalnych.
SIT odnosi się do opracowań małoskalowych takich jak ewidencja gruntów i budynków w zakresie powiatu, zarządzanie sieciami uzbrojenia terenu w obrębie gminy itp. To grupa systemów opierająca się na informacjach o lokalizacji przestrzennej, o właścicielach terenu, jego podziałach, sposobie wykorzystania.
SIS - to bliżej nieokreślona grupa systemów tworzonych dla specjalnych potrzeb
BIS - grupa systemów opartych na informacjach o kształcie i architekturze budynku, przestrzennym rozmieszczeniu elementów konstrukcyjnych i ich rodzaju .
Ogólnie mówiąc SIP składa się z:
- danych geograficznych lub topograficznych (przestrzennych i nieprzestrzennych)
- procedur prawnych (regulują system prawny)
-sprzętu komputerowego
- oprogramowania
- ludzi (twórców i użytkowników)
Zastosowanie:
do obrotu nieruchomościami.... (wspólna baza danych biur pośrednictwa w obrocie nier);
do gospodarki gruntami
do prowadzenia KW w systemie informatycznym (tworzy się jednolitą bazę danych) ;
do katastru (będzie to zinformatyzowana i zaktualizowana ewidencja gruntów i budynków uzupełniona o dane dotyczące wartości nieruchomości) ;
polepszenie windykacji podatków - dzięki SIT obejmującemu ewidencję gruntów, budynków, i techniczne uzbrojenie terenu.
zarządzanie przestrzenią miejską
przy Systemie Ewidencji Działek Rolnych: budowa przez ARiMR Systemu Ewidencji Działek Rolnych. System ten odgrywa kluczową rolę w procesie przyznawania polskim rolnikom dopłat z UE.
przy Systemie informacji przestrzennej Lasów Państwowych: zintegrowany system informatyczny ma usprawnić gospodarkę leśną i eliminować błędy w zarządzaniu lasem. Jego wdrożenie umożliwiło nie tylko prowadzenie złożonych analiz przestrzennych, będących podstawą wspomagania decyzyjnego, lecz także integrację wielu niezależnych rozwiązań informatycznych funkcjonujących w Lasach Państwowych.
GGk 11.: Czynności geodety powiatowego w procesie gospodarowania nieruchomościami SP i j.s.t.
Zgodnie z art. 6a, ust. 1, ustawy Prawo geodezyjne i kartograficzne:
1. Służbę Geodezyjną i Kartograficzną stanowią:
1) organy nadzoru geodezyjnego i kartograficznego:
a) Główny Geodeta Kraju,
b) wojewoda wykonujący zadania przy pomocy wojewódzkiego inspektora nadzoru geodezyjnego i kartograficznego jako kierownika inspekcji geodezyjnej i kartograficznej, wchodzącej w skład zespolonej administracji rządowej w województwie;
2) organy administracji geodezyjnej i kartograficznej:
a) marszałek województwa wykonujący zadania przy pomocy geodety województwa wchodzącego w skład urzędu marszałkowskiego,
b) starosta wykonujący zadania przy pomocy geodety powiatowego wchodzącego
w skład starostwa powiatowego.
Od geodety powiatowego zależy jak wygląda obraz „ geodezji” w powiecie oraz jak ocenia się władzę powiatową - Starostę (organem realizującym w powiecie zadania z zakresu administracji rządowej, w tym zadania geodezyjne, jest starosta).
Geodeta Powiatowy realizuje zadania Starosty wynikające z art. 7d ustawy z dnia 17 maja 1989 r. Prawo Geodezyjne i Kartograficzne, a w szczególności odpowiada za:
1) prowadzenie powiatowego zasobu geodezyjnego i kartograficznego, w tym ewidencji gruntów i budynków, gleboznawczej klasyfikacji gruntów i geodezyjnej ewidencji sieci uzbrojenia terenu oraz dysponowanie środkami powiatowego Funduszu Gospodarki Zasobem Geodezyjnym i Kartograficznym;
2) koordynacja usytuowania projektowanych sieci uzbrojenia terenu;
3) zakładanie osnów szczegółowych;
4) zakładanie i aktualizacja mapy zasadniczej;
5) przeprowadzanie powszechnej taksacji nieruchomości oraz opracowywanie i prowadzenie map i tabel taksacyjnych dotyczących nieruchomości;
6) ochrona znaków geodezyjnych, grawimetrycznych i magnetycznych;
7) prowadzenie powiatowych baz danych wchodzących w skład krajowego systemu informacji o terenie.
Istotną częścią zagadnień, za które jest odpowiedzialny geodeta powiatowy oprócz geodezji jest gospodarka nieruchomościami. Podstawowe przepisy, z których wynikają zadania w tym zakresie, powierzone Staroście, oraz zadania własne Powiatu, to kodeks cywilny i ustawa o gospodarce nieruchomościami.
Niektóre zadania:
- sprawy ewidencjonowania nieruchomości,
- gospodarowania zasobem,
- obrót nieruchomościami,
- odszkodowania za grunty zajęte pod drogi publiczne,
- regulacja stanu prawnego nieruchomości.
W zależności od struktury organizacyjnej w danym powiecie geodeta powiatowy jest
odpowiedzialny najczęściej za gospodarkę nieruchomościami Skarbu Państwa i Powiatu.
W kwestii relacji pomiędzy geodetą a władzami, istotny jest fakt, że organem nadzoru w zakresie gospodarki nieruchomościami Skarbu Państwa jest Wojewoda. Nadzór ten przejawia się w uzależnianiu ważności czynności z zakresu obrotu nieruchomościami Skarbu Państwa od zgody Wojewody na taki obrót, czy też udzielaniu bonifikat od opłat.
Z kolei w zakresie gospodarki nieruchomościami Powiatu nie bez znaczenia jest fakt, że „ośrodkiem decyzyjnym” jest Rada bądź Zarząd Powiatu.
Na tej płaszczyźnie rolą geodety powiatowego w wielu przypadkach jest dbanie o dokonywanie czynności z zakresu gospodarki nieruchomościami w sposób zgodny z prawem. Bowiem niejednokrotnie „ośrodek decyzyjny” z różnych przyczyn, najczęściej z powodu nieznajomości szczegółowych regulacji prawnych, próbuje podejmować decyzje, w wyniku których dana czynność naruszałaby prawo bądź byłaby niezgodna z prawem.
W Urzędzie geodeta pełni ważną rolę wynikającą z ustawowych zadań. Większość zadań jest związanych z przestrzennym usytuowaniem zdarzenia i dlatego często urzędnicy są bezradni bez pomocy specjalisty od tych zagadnień n.p.: ochrona środowiska, budownictwo, zarządzanie kryzysowe, wyłączanie gruntów z produkcji rolnej, podatki itp.
Należy dążyć do wypracowania takiej organizacji służby geodezyjnej i takich metod działania aby zarówno władze, jak i użytkownicy informacji (geodezyjnych), byli przekonani o potrzebie istnienia geodezji , oraz o istotnej roli geodety w wielu ziedzinach gospodarki.
ZADANIA BARDZIEJ SZCZEGÓŁOWO WEDŁUG NIEKTÓRYCH PRZEPISÓW PRAWNYCH:
zadania wynikające z Ustawy Prawo g i k:
- wprowadzanie zmian danych objętych ewidencją gruntów i budynków na podstawie odpisów prawomocnych decyzji administracyjnych i orzeczeń sądowych oraz odpisów aktów notarialnych,
- wydawanie odpłatnie na żądanie właścicieli wyrysów i wypisów z operatu ewidencyjnego,
- zawiadamianie sądu właściwego do prowadzenia księgi wieczystej o każdej zmianie właściciela nieruchomości, dla której założona jest księga wieczysta,
- opracowanie projektu założenia ewidencji gruntów i budynków i uzgadnianie tego projektu z wojewódzkim inspektorem nadzoru geodezyjnego i kartograficznego,
- wykonywanie modernizacji ewidencji gruntów i budynków,
- przeprowadzanie postępowania administracyjnego w sprawie aktualizacji operatu ewidencyjnego lub wzywanie do dostarczenia dokumentów geodezyjnych, kartograficznych i innych niezbędnych do wprowadzenia zmian w ewidencji gruntów i budynków,
- prowadzenie rejestru cen nieruchomości, określonych w aktach notarialnych oraz wartości nieruchomości, określonych przez rzeczoznawców majątkowych w operatach szacunkowych, których wyciągi przekazywane są do ewidencji gruntów i budynków na mocy odrębnych przepisów,
Zadania wynikające z Ustawy z 21 sierpnia 1997 roku o gospodarce nieruchomościami
Gospodarowanie nieruchomościami stanowiącymi własność Skarbu Państwa oraz własność Powiatu, w tym:
- sprzedaż nieruchomości lub oddawanie nieruchomości w użytkowanie wieczyste,
- ustalanie wysokości i terminów opłat z tytułu użytkowania wieczystego,
- udzielanie bonifikat od w/w opłat rocznych,
- aktualizowanie opłat rocznych z urzędu lub na wniosek użytkownika wieczystego,
- zwrot wywłaszczonych nieruchomości i rozliczenia z tytułu zwrotu,
- tworzenie zasobów nieruchomości Skarbu Państwa i Powiatu,
- przeprowadzanie postępowań związanych z przetargami na zbycie nieruchomości Skarbu Państwa i Powiatu,
- oddawanie nieruchomości Skarbu Państwa lub Powiatu w trwały zarząd,
- przekazywanie nieruchomości na cele szczególne,
- ustalanie sposobu i terminów zagospodarowania nieruchomości gruntowych,
- wykonywanie, ograniczanie lub pozbawianie praw do nieruchomości,
- wywłaszczanie nieruchomości,
- ograniczanie, w drodze decyzji sposobu korzystania z nieruchomości,
- odszkodowanie za wywłaszczone nieruchomości,
- współpraca z wojewodą w sprawie realizacji prawa do rekompensaty z tytułu pozostawienia nieruchomości poza obecnymi granicami Rzeczypospolitej Polskiej.
Zadania wynikające z przekształcenia prawa użytkowania wieczystego w prawo własności:
- Przekształcenie prawa użytkowania wieczystego w prawo własności nieruchomości,
- ustalanie opłat za przekształcenie oraz orzekanie o ratach.
Zadania wynikające z Ustawy z dnia 26 marca 1982 roku o scalaniu i wymianie gruntów:
- prowadzenie na koszt Skarbu Państwa postępowania scaleniowego lub wymiennego,
- regulacja ksiąg wieczystych.
Zadania wynikające z gospodarowania nieruchomościami rolnymi Skarbu Państwa:
- występowanie do Agencji Nieruchomości Rolnych o przekazanie nieodpłatnie nieruchomości na cele związane z inwestycjami infrastrukturalnymi służącymi wykonywaniu zadań rządowych oraz zadań własnych Powiatu,
- współpraca z ANR w sprawie ustalania, potwierdzania podstaw prawnych dotyczących przejęcia nieruchomości rolnych do zasobu ANR, oraz informowanie o ewentualnych wnioskach roszczeniowych byłych właścicieli.
Zadania związane z nabywaniem nieruchomości przez cudzoziemców
-występowanie z żądaniem wydania przez sąd orzeczenia nieważności nabycia nieruchomości.
GGk 12 Rola katastru nieruchomości, ksiąg wieczystych i ewidencji podatkowej w realizacji procedur gospodarki nieruchomościami
KATASTER służy do gromadzenia informacji o gruntach, budynkach i lokalach, ich właścicielach oraz innych osobach fizycznych lub prawnych władających tymi gruntami, budynkami oraz lokalami .Ma na celu gromadzenie i dostarczanie urzędowych informacji o gruntach na potrzeby planowania i zagospodarowania przestrzennego, wymiaru podatków i innych obciążeń publicznoprawnych, oznaczenia nieruchomości w KW, statystyki publicznej i gospodarki nieruchomościami oraz zapewnienie ochrony interesów majątkowych stron obrotu nieruchomościami.
Kataster to:
Zbiór urzędowych informacji o gruntach
Jest podstawowym elementem SIT
Jest zbiorem danych do opisu nieruchomości
Opisuje stan faktyczny nieruchomości
Dane z katastru mają podstawowe znaczenie dla oznaczenia nieruchomości oraz określenia ich granic w KW
Stanowi podstawę oznaczenia nieruchomości w KW
Dane ewidencyjne udostępniane są (przez starostę) w formie m.in.: wydruków, wyrysów, wypisów.
*Przepisy prawne:
Prawo g i k
Rozporządzenie w sprawie ewidencji gruntów i budynków
KSIĘGI WIECZYSTE
„KW prowadzi się w celu ustalenia stanu prawnego nieruchomości.
Ustalenie stanu prawnego jest zasadniczą funkcją KW. Ich zadaniem jest stabilizacja stosunków własnościowych i zagwarantowanie bezpieczeństwa obrotu nieruchomości. Prawno - materialne zasady KW (m.in.: rękojmia wiary publicznej, domniemanie zgodności ze stanem prawnym, pierwszeństwo praw wpisanych) są podstawowym źródłem pewności i bezpieczeństwa obrotu nieruchomościami. Zapewnienie tego bezpieczeństwa stało się podstawowym zadaniem i funkcją KW” („Nieruchomości”, H. Kisielowska).
Rola KW:
- ujawnia się w nich prawa rzeczowe dotyczące nieruchomości
- chronią bezpieczeństwo obrotu nieruchomościami poprzez rękojmie wiary publicznej (w razie niezgodności między stanem prawnym nieruchomości ujawnionym w KW, a rzeczywistym stanem prawnym nieruchomości, treść księgi rozstrzyga na korzyść tego, kto przez czynność prawną z osobą uprawnioną według treści księgi nabył na przykład własność)
*Przepisy prawne:
Ustawa o KW i hipotece
Rozporządzenie w sprawie prowadzenia KW i zbioru dokumentów
EWIDENCJA PODATKOWA
Rola ewidencji:
gromadzenie danych dotyczących podatników oraz przedmiotów opodatkowania (gruntów, budynków) do wymiaru i poboru podatku od nieruchomości, rolnego, leśnego
Podstawowym zbiorem informacji z którego korzysta ewidencja podatkowa nieruchomości jest ewidencja gruntów i budynków
W ewidencji wykazuje się następujące dane:
dla os. fiz: imię, nazwisko, adres, NIP, PESEL, REGON
dla os. prawnych i jednostek organizacyjnych nie posiadaj. osobowości prawnej: nazwę firmy, adres, NIP, REGON
dodatkowo dla obu powyższych wskazuje się czy są: właścicielem, posiadaczem samoistnym, użytkownikiem wieczystym.
*Przepisy prawne:
Ustawa o podatkach i opłatach lokalnych
Rozporządzenie w sprawie ewidencji podatkowej nieruchomości
GGk 16 Pasywne i aktywne metody teledetekcji- charakterystyka
Teledetekcja (ang. remote sensing) to badanie wykonane z pewnej odległości. Badania teledetekcyjne można wykonywać z samolotów, przestrzeni kosmicznej lub z powierzchni ziemi. Metody teledetekcyjne dzielą się na aktywne i pasywne.
Aktywny system polega na wysyłaniu promieniowania elektromagnetycznego w kierunku obiektu ze sztucznego źródła emitowania energii. Promieniowanie odbite od obiektu trafia do odbiornika, gdzie zostaje zarejestrowane a następnie przetwarzane na obraz. Przykładem aktywnego systemu są: sodar, radar, lidar itd.]
Radar wysyła mikrofale, lidar wysyła światło, a sodar wysyła fale akustyczne.
W przybliżeniu lidar można opisać jako szybko migającą latarkę, która wysyła pulsy światła. Jeżeli światło nie napotyka przeszkody na swojej drodze, to rozchodzi się bez zaburzeń. Natomiast, kiedy napotyka przeszkodę, odbija się od niej; intensywność odbicia i szybkość powrotu sygnału umożliwia ocenę odległości do obiektu i jego własności. Lidar służy np. do oceny ilości zanieczyszczeń w atmosferze. Cząstkami odbijającymi mogą być pyły zawieszone w atmosferze (aerozol atmosferyczny).
Radar, w którym mikrofale służą do oceny prędkości obiektu (np. lecącego samolotu obserwowanego z ziemi) lub do oceny jego odległości od radaru.
Sodar bada atmosferę za pomocą rozchodzenia się fal dźwiękowych na fluktuacjach powierza. Służy do badania prędkości wiatru na różnych poziomach.
Pasywny system polega na rejestracji promieniowania wysyłanego przez badany obiekt, na które składa się odbite od obiektu promieniowanie pochodzące ze źródła oświetlenia oraz promieniowanie własne obiektu. Np.: fotografia - zdjęcie fotograficzne jest przykładem teledetekcji pasywnej, skanowanie, telewizja] Przykładami pasywnych instrumentów teledetekcyjnych są: radiometry, fotometry czy kamery lotnicze.
Pasywnymi technikami teledetekcyjnymi jest obserwacja dochodzącego sygnału. Np. kolor oceanu można ocenić z przestrzeni kosmicznej robiąc zdjęcie kamerą fotograficzną. W praktyce robi się sekwencję zdjęć w różnych kolorach. W pasywnych technikach teledetekcji wprowadza się różnego rodzaju poprawki. Dla przykładu, badając kolor oceanu z przestrzeni kosmicznej, trzeba wyeliminować przyczynek od światła dochodzącego bezpośrednio z atmosfery.
GGK 18 Podstawowe metody cyfrowego przetwarzania wielospektralnych zdjęć satelitarnych.
Przetwarzanie obrazów teledetekcyjnych
Wyróżnia się w nim następujące grupy przetworzeń:
•zmiany jasności i kontrastu,
•filtracje cyfrowe,
•nakładanie obrazów (tzw. merging),
•operacje międzykanałowe.
Wzmocnienia obrazów
Wzmocnienia obrazów są procedurami zmierzającymi do optymalnego przygotowania obrazów do interpretacji tematycznych lub uzyskania danych liczbowych istotnych dla użytkownika. Ten typ przetworzeń jest często utożsamiany z całym procesem cyfrowego przetwarzania obrazów teledetekcyjnych.
Zmiany jasności i kontrastu obrazów
Zmiany jasności i kontrastu są najczęściej używanymi procedurami cyfrowego przetwarzania obrazów w poszczególnych kanałach rejestrowanego promieniowania. Stosowane są wtedy, kiedy w oryginalnych obrazach, po ich wizualizacji, twierdza się niewielki zakres radiometrycznej jasności pikseli. Zmiany jasności i kontrastu przetransformowują zakres jasności pikseli obrazu oryginalnego na inne zakresy jasności w wizualizowanym obrazie na ekranie komputera.
Filtracje cyfrowe obrazów
Filtracje cyfrowe są zaliczane do najbardziej wyrafinowanych sposobów lokalnego, wielopikselowego przetwarzania obrazów cyfrowych. Działają w kierunku uczytelnienia szczegółów, wzmocnienia lub osłabienia wyrazistości elementów liniowych w obrazie oraz często w kierunku osłabienia zakłóceń radiometrycznych.
Najczęściej stosowaną techniką przetworzeń w filtracjach cyfrowych jest budowa matrycy kwadratowej z różnymi wartościami liczbowymi w poszczególnych polach matrycy, nałożenie tej matrycy na przetwarzany obraz, a następnie wykorzystanie wartości liczbowych pól matrycy i wartości radiometrycznych pikseli obrazu w obrębie matrycy do wyliczenia nowych wartości pikseli obrazu przetwarzanego.
Nakładanie obrazów
Nakładanie obrazów, zwane mergingiem, powoduje nałożenie dwóch różnych obrazów cyfrowych na siebie. Efekt nałożenia, odmiennie niż w przypadku mozaikowania, jest widoczny w postaci obrazu wynikowego, który zachowuje informację z obydwu nakładanych obrazów.
Procedury mergingu są powszechnie wykorzystywane w celu połączenia obrazów teledetekcyjnych o różnej rozdzielczości terenowej.
Typowym zastosowaniem jest połączenie obrazu wielospektralnego, uzyskanego z systemu Landsat TM, o rozdzielczości terenowej 30 m, z obrazem panchromatycznym SPOT P, o rozdzielczości terenowej 10 m.
Techniki nakładania obrazów są szczególnie ważne w sytuacji, kiedy narynku danych teledetekcyjnych mamy dostępne satelitarne obrazy panchromatyczne o rozdzielczości około 1 m, np. obrazy z systemu IKONOS
Operacje międzykanałowe
Operacje międzykanałowe wykorzystują informację o jasnościach radiometrycznych pikseli pochodzących z różnych kanałów wielospektralnego obrazu teledetekcyjnego.
Ta grupa przekształceń jest podstawowa przy tworzeniu kompozycji barwnych z obrazów wielospektralnych, przy wyznaczaniu indeksu wegetacyjnego (NDVI) i kompresji informacji wielospektralnej w tzw. procedurze analizy głównych składowych (PCA)
GGk 19 Metodyka opracowania sesji statycznych GPS
Podczas realizacji pomiarów należy zwracać uwagę na utrzymanie ciągłości śledzenia fazy sygnału, w taki sposób, aby nie doprowadzić do utraty nieoznaczoności skutkującej potrzebą powtórzenia sesji.
W tym trybie pomiarowym opracowanie wyników następuje po zakończeniu sesji polowych. Rejestrowane dane mogą pochodzić z wielu odbiorników czy kampanii pomiarowych w wyniku, których uzyskujemy współrzędne punktów wyznaczanej sieci geodezyjnej. Postprocessing wymaga dodatkowego oprogramowania umożliwiającego obliczenia przy jednoczesnej konieczności zapewnienia wysokiej staranności wykonywanych pomiarów.
Zgranie obserwacji z obu punktów do komputera (Zgrywamy 3 typy danych: surowe obserwacje- C1, P1,…. L1 i L2 efemerydy satelitów, informacje dotyczące punktu-nazwa, wysokość)
Wybór punktu znanego i wprowadzenie współrzędnych tego punktu (B, L, H lub x, y, z)- pomiary fazowe zostały poprawione ze względu na efekt troposferyczny i jonosferyczny
Obliczenie orbity satelitów
Obliczenie współrzędnych przybliżonych punktu B wyznaczanego na podstawie pseudoodleglości, XB YB ZB dok. rzędu 10 m
Obliczanie względne:
Obliczenie wektora na podstawie TD z pomiarów fazowych
![]()
Cechą charakterystyczna jest brak równań nieoznaczoności ale skutkuje to niższa dokładnością wyznaczenie punktu rzędu 0, 5m (aktualizacja współrzędnych przybliżonych punktu B)
Program przechodzi do obliczeń wektora na podstawie modelu DD z pomiarów fazowych. Wyznaczenie bardziej ulepszonych współrzędnych punktu B, ale także wyznaczenie zestawu nieoznaczoności (dok. rzędu 10 cm)
Nieoznaczoność wyznaczamy MNK. N wychodzi w postaci liczb rzeczywistych. Takie rozwiązanie nieoznaczoności z podwójnych różnic jest typu `float' bez zaokrąglenia
Podwójne różnice fazowe: ![]()
Program wykonuje badania, których skutkiem ma być prawidłowe zaokrąglenie nieoznaczoności do liczb całkowitych
W przypadku zaokrąglenia przez program nieoznaczoności do liczb całkowitych następuje wyznaczenie wektora `fixed' na podstawie podwójnych różnic, przeciwnym wypadku pozostawia rozwiązanie typu `float' jako ostateczne.
GGk 20 Pomiar osnów realizacyjnych metodami GPS
Pomiary statyczne - realizowane w trybie postprocessingu są podstawową metodą wyznaczania wektora pomiędzy dwoma odbiornikami fazowymi, z których jeden umieszczony jest na punkcie o znanych współrzędnych a drugi na wyznaczanej pozycji. Wszystkie odbiorniki wykonujące pomiar pozostają względem siebie w bezruchu. Zapewniają najwyższą osiąganą przez technikę GPS dokładność. Czas rejestracji od 30 do 60 min. Intrewał rejestracji od 5-30 sekWykorzystywane są w pomiarach krajowych osnów geodezyjnych oraz w badaniach geodynamicznych.
Pozwalają uzyskać następujące dokładności:
− Przy użyciu efemeryd pokładowych: długość: ±1cm + 2ppm*S,
wysokość: ±2cm + 2ppm*S,
− Przy użyciu orbit precyzyjnych IGS: długość: 10-8 - 10-9 dla wektorów ponad 300km
Szybkie pomiary statyczne (FastStatic, Rapid Static) - odmiana pomiarów statycznych, dla
których skrócono do 5-20 minut czas pomiaru na wyznaczanym punkcie. Osiągnięto to wprowadzając
nowe generacje odbiorników (głównie dwuczęstotliwościowych) oraz algorytmy wyznaczania
nieoznaczoności. Zaostrzeniu uległy w stosunku do metody statycznej kryteria pomiaru:
− Odbiornik musi ciągle śledzić minimum 5-6 satelitów,
− Interwał zliczeń obserwacji 5-15 sekund,
− Minimalna wysokość satelity nad horyzontem 150,
− Długość wektorów nie powinna przekraczać 20 km.
Metoda pozwala uzyskać dokładności wyznaczenia punktu na poziomie kilku cm wykorzystując
oprogramowanie firmowe.
Pomiary statyczne
+ na statywach lub filarach obserwacyjnych
+ jednoczesne obserwacje na wielu punktach
+ duże odległości (10 km do tysięcy km)
+ długie sesje (godziny, dni, permanentnie)
+ interwał rejestracji od 5 do 30 sekund
+ redukcja wielotorowości
+ opracowanie danych w Post-processingu
+ pomiary osnów, pomiary badawcze
Faststatic rapidstatic
+ krótsze odległości (do 10 km)
+ krótsze sesje (10 minut)
+ 2 stacje referencyjne wymagane
+ odbiorniki L1+L2
+ interwał rejestracji 1-10 sekund
+ obliczenia w post-processingu
+ zagęszczenie osnów (III klasa
i osnowa pomiarowa)
GGk 21 Metody pomiaru GPS w czasie rzeczywistym
Pomiary kinematyczne - głównym problemem związanym z realizacją pomiarów kinematycznych (w ruchu) był wymóg zachowania ciągłości śledzenia minimum 4 satelitów oraz konieczność wykonania procesu inicjalizacji odbiornika ruchomego.
Ponieważ w warunkach terenowych często zdarzało się utracić ciągłość rejestracji danych, konieczny był powrót do punktu o znanych współrzędnych i powtórzenie procesu inicjalizacji. Drastycznie ograniczało to użyteczność tej metody pomiarów.
Opracowanie algorytmu inicjalizacji OTF (ang. On The Fly) spowodowało, że metody
kinematyczne stały się bardzo użyteczne i efektywne w pracach geodezyjnych.
Pomiary pół-kinematyczne „Stop-and-go”
+ odległości do 1 km
+ obserwacje 1 minutowe
+ interwał sekundowy
+ wymagana inicjalizacja
+ ciągła rejestracja minimum czterech tych samych satelitów
Pomiary kinematyczne
+ wymagana inicjalizacja
+ ciągły pomiar
+ interwał rejestracji 1 sekunda
RTK
RTK (Real Time Kinematic) - jak nazwa wskazuje jest to metoda kinematyczna z wyznaczeniem pozycji w czasie rzeczywistym.
Warunkiem realizacji pomiarów RTK jest bezpośrednia łączność między stacją bazową a odbiornikiem ruchomym. Informacje ze stacji bazowej w postaci obserwacji lub poprawek do obserwacji są przesyłane do odbiornika ruchomego, gdzie następuje proces opracowania i wyznaczenia pozycji. Opracowanie obserwacji ze stacji bazowej oraz odbiornika ruchomego następuje bezpośrednio w terenie w przenośnym komputerze (palmptopie). Metoda bazuje na algorytmie OTF. Wymaga widoczności minimum 5 satelitów powyżej 150. Zaletą w stosunku do pomiarów kinematycznych jest natychmiastowe wyznaczenie pozycji, natomiast do wad należy zaliczyć konieczność zapewnienia ciągłej łączności między stacją bazową i odbiornikiem ruchomym oraz ograniczeniem zasięgu metody wynikającym z możliwości uproszczonych algorytmów stosowanych w komputerze przenośnym.
Typowe warunki pomiarów RTK to:
− Inicjalizacja około 1 minuty,
− Pomiar pikiety 3-5 sekundy,
− Zasięg pomiarów 10 do 30km,
− Dokładność ±1-2cm+2ppm·S dla składowych horyzontalnych i około
±3cm+2ppm·S dla składowej wysokościowej.
Dokładność metody RTK/OTF jest rzędu 1-2cm + 1ppm.
Jego odpowiednikiem w systemie asg-eupos jest nawgeo
Powierzchniowe RTK (RTN) - wariant pomiarów RTK. W pomiarach tych rolę stacji bazowej przejmuje sieć stacji permanentnych przesyłających dane obserwacyjne w czasie rzeczywistym do Centrum Zarządzania. Oprogramowanie sterujące w Centrum Zarządzania przetwarza dane ze stacji tworząc poprawki powierzchniowe wysyłane do użytkownika.
Zaletą systemu powierzchniowego RTK jest możliwość pracy z jednym odbiornikiem ruchomym. Rolę stacji bazowej przejmuję na siebie system. Odległości między stacjami według obecnych warunków oprogramowania Centrum Zarządzania mogą wynosić 70-80 km, a otrzymywane dokładności są wyższe niż w przypadku zwykłych pomiarów RTK.
DGPS
Stacja bazowa wykonuje ciągłe obserwacje kodowe wyznacza swoja pozycje absolutną i określa poprawki korekcyjne do pomierzonej pseudoodległości na zasadzie porównywania pozycji aktualnie wyznaczonej ze współrzędnych znanych. Odbiornik na stacji referencyjnej porównuje obliczone wartości pseudoodległości do poszczególnych satelitów z pseudoodległościami rzeczywistymi wyznaczonymi na podstawie znanej pozycji stacji. Obliczone w ten sposób poprawki do pomiarów pseudoodległości wysyłane są poprzez radiomodem lub telefon komórkowy do odbiornika ruchomego.
W ten sposób pozycja absolutna odbiornika ruchomego jest korygowana przez uwzględnienie poprawek wyznaczonych przez satelitę bazową eliminując tym samym istotne błędy systemu GPS. Do błędów tych należy zaliczyć wpływ jonosfery i troposfery na propagację sygnału radiowego, błędy zegara satelity, błędy efemerydalne. Stosując technikę DGPS możemy w czasie prawie rzeczywistym wyznaczyć pozycję obiektu ruchomego z dokładnością od 0.5m do 3m w zależności od klasy wykorzystana sprzętu i warunków satelitarnych w trakcie obserwacji.
Generowanie oraz transmisja danych z poprawkami DGPS:
drogą radiową UHF/VHF
poprzez Internet
poprzez sieć telefonii komórkowej GPRS
Obliczanie poprawki DGPS
Wartość poprawki do pomierzonej pseudoodległości można obliczyć porównując rzeczywistą odległość stacji referencyjnej i satelity ![]()
oraz pseudoodległość ![]()
mierzoną w trakcie obserwacji. Podstawowe równanie obserwacji kodowych ![]()
dla stacji referencyjnej uwzględniając także błąd parametrów orbity ER będzie miało postać:
![]()
Prawdziwą odległość od anteny odbiornika do mierzonego w danej epoce czasu t satelity s ![]()
obliczamy wykorzystując znane współrzędne stacji XR, YR, ZR oraz współrzędne satelity Xs, Ys, Zs obliczone z algorytmu efemerydalnego na podstawie depeszy nawigacyjnej.
Wykorzystując poprzednie dwa wzory możemy obliczyć wartość poprawek korekcyjnych pseudoodległości PRC w epoce czasu t0 dla danego satelity s
![]()
Wartość poprawki obliczona w odbiorniku na stacji referencyjnej w czasie t0 w rzeczywistości dociera do odbiornika ruchomego z pewnym opóźnieniem t-t0 które powinno być uwzględnione do wyznaczeń pozycji z obserwacji kodowych. Dla tego stacja referencyjna DGPS oprócz podstawowej wartości poprawki różnicowej PRCS(t0) wysyła także szybkość zmian tej poprawki PRCS(t) z tego powodu należy uwzględnić opóźnienie t-t0 w poprzednim równaniu
![]()
Obserwowaną pseudoodległość dla wyznaczonego odbiornika ruchomego M w epoce czasu t możemy zapisać
![]()
Dodając poprawki różnicowe ![]()
otrzymamy
![]()
Błąd zegara satelity został wyeliminowany całkowicie. Błędy parametrów orbit EM-ER poprawki jonosferycznej oraz poprawki troposferycznej są zbliżone w wartościach dla stacji i odbiornika ruchomego więc ich wpływ jest znacznie mniejszy.
Zastosowanie DGPS:
nawigacja lądowa, morska , lotnicza
do robienia map dna morza
przy kontroli ruchu pojazdów (pociągów i pojazdów komunikacji miejskiej)
przy kontroli i dyspozycji środkami transportu ( straż pożarna, pogotowie)
do nawigacji indywidualnych środków transportu w sprzężeniu z mapami numerycznymi sieci drogowej i miast
w połączeniu ze specjalistyczną aparaturą stosowany jest DGPS do tematycznej kartografii
aktualizacja map średnioskalowych
lokalizacja obiektów i zjawisk przyrodniczych
jego odpowiednikiem w systemie asg eupos jest kodgis lub nawgis
Różne techniki pomiarowe z zastosowanie systemu GPS - sposoby pomiaru, dokładność, zastosowanie.
Metoda statyczna (względna, post-processing)
Najszerzej stosowaną i najbardziej znaną jest technika obserwacji statycznych. Wykorzystuje pomiary fazowe. Zapewnia ona najwyższe, możliwe do osiągnięcia w pomiarach GPS, dokładności pozycjonowania. Błędy średnie położeń punktów wyznaczonych tą techniką są rzędu 2-5 mm, wymaga ona dość długich od 40 min. jednoczesnych obserwacji na obu punktach. Dokładności jakie uzyskamy tą metodą zależą od ilości obserowanych satelitów na punktach, długością wektora, czasem pomiaru. Pomiar tą metodą opiera się na pomiarze wektora pomiędzy dwoma punktami na których jednocześnie są rejestrowane obserwacje do satelitów.
Stosowana jest zakładania osnów typu EUREF, POLREF, osnów I, II, III klasy, do zakładania osnów realizacyjnych, do pomiarów przemieszczeń i odkształceń obiektów inżynierskich i ich otoczenia (np. zapór wodnych, hałd, )
Wykorzystywana także przy pomiarach realizacyjnych dotyczących wyznaczania współrzędnych punktów odniesienia, stanowisk obserwacyjnych punktów wyznaczających główne osie konstrukcyjne, punkty osnowy budowlano-montażowej.
Metoda RTK (Real Time Kinematic)
Opiera się na pomiarach fazowych. Pomiar odbywa się na obu częstotliwościach L1 i L2. Pomiar w tej metodzie opiera się na użyciu dwóch odbiorników, jednego będącego bazą lub lokalną stacją referencyjna znajdującego się nad punktem o znanych współrzędnych i nadającego drogą radiowa (lub w jakiś inny sposób Internet, sieci komórkowe) poprawki, może to być też stacja referencyjna stała najlepiej w odległości około 10-15 km od miejsca pomiaru. Drugi odbiornik tzw rover, jest odbiornikiem ruchomym który otrzymuje poprawki z punktu referencyjnego w czasie rzeczywistym. Odbiornik ten wykonuje skomplikowane obliczenia na podstawie danych odebranych od satelitów i danych ze stacj referencyjne i w bardzo krótkim czasie wyznacza nieoznaczoność stosując w obliczeniach algorytm Kalmana, lub metodę LAMBDA. Dokładności przy pomiarze taką techniką to około 1-3 cm, najgorsze jest wyznaczenie dokładności. Otrzymujemy tu współrzędne na każdą epokę pomiaru.
Poprawki jakie przesyła stacja referencyjna do stacji wyznaczanje (rover ) to pomiary fazowe wraz z ewentualnymi poprawkami do tych pomiarów, dane te są wykorzystywane do wyznaczania nieoznaczoności (ambiguity).
W metodzie RTK można obliczenia wykonać poźniej (post-processing) wykorzystując do tego dane ze stacji referencyjnej w rojenie gdzie mierzyliśmy jeśli nie mieliśmy możliwości odbioru tych informacji w czasie rzeczywistym, na przykład stacje permanentne GPS takie jak Lamkówko, czy stacje Aktywniej Sieci Geodezyjnej w rejonie Krakowa.
Metoda RTK stosowana jest często przy kontroli pionowości wznoszenia budowli wysmukłych, także do prac realizacyjnych, nawigacji precyzyjnej w portach, do nawigacji maszyn budowlanych, pogłębiarek, jednostek wykonujących pomiary batymetryczne.
Także w wersji post-processing do monitoringu budowli inżynierskich takich jak maszty RTV, kominy, zapory wodne, mosty. Do odkształceń kadłubów statków podczas ich wodowania i próbnych rejsów i do szeroko rozumianych pomiarów inwentaryzacyjnych.
DGPS - differental GPS (GPS różnicowe)
Technika względna, opierająca się na pomiarze pseudoodległości, jest to technika czasu rzeczywistego, wykorzystywana w nawigacji precyzyjnej do niektórych zastosowań GIS, nawigacji ladowej I lotniczej. Do wykonywania pomiarów w tej technice potrzebna jest stacja referencyjna znajdująca się na punkcie o znanych współrzędnych i odbiornik ruchomy, którego pozycje wyznaczamy. Między tymi odbiornikami musi zachodzić komunikacja radiowa, dzieki której można przesłać poprawki ze stacj referencyjnej do odbiornika ruchomego. Na stacji referencyjne dokonywane są obliczenia poprawki chodu zegara odbiornika, na podstawie pomiaru pseudoodległości oblicza się odległość obserwowaną, oblicza się odległość na podstawie znanych współrzędnych, a następnie porównuje się je i wyznacza poprawkę do odległości. Tworzony jest zbiór dla wszystkich obserwowanych satelitów. Istniej też możliwość obliczania poprawek do współrzędnych które przesyła się do stacji wyznaczanej. Jednak najczęściej na poprawkę składa się: poprawka do odległości, moment czasu dla którego jest dana poprawka (t0), pochodna po czasie poprawki (czyli jak szybko się zmienia i w którym kierunku, czy rośnie czy maleje).
Poprawki są przesyłane w międzynarodowym formacie RTCM 104 (v.2.1)
Odległość poprawioną oblicza się:
Odl-popri = odl_pomi + popr_refi + (t - t0)*pochod_popr-refi
W tej technice dokładność wyznaczenia pozycji to około 1 m.
Techniki pomiaru GPS możemy podzielić na:
- absolutne (jeden odbiornik) i względne (2 i więcej odbiorników)
- statyczne i kinematyczne
- „post-processing” i w czasie rzeczywistym (Real-time)
- pomiar pseudoodległości i pomiary fazowe
Metoda statyczna (względna, post-processing)
Najszerzej stosowaną i najbardziej znaną jest technika obserwacji statycznych. Wykorzystuje pomiary fazowe. Zapewnia ona najwyższe, możliwe do osiągnięcia w pomiarach GPS, dokładności pozycjonowania. Błędy średnie położeń punktów wyznaczonych tą techniką są rzędu 2-5 mm, wymaga ona dość długich od 40 min. jednoczesnych obserwacji na obu punktach.
Metoda Rapid Static (szybka statyczna)
Metoda ta polega na skróceniu czasu obserwacji przy spełnieniu pewnych warunków.
Metoda ta może być stosowana, jeśli mamy do dyspozycji odbiorniki z kodem precyzyjnym P. Dodatkowe ograniczenia to ilość satelitów (minimum 5, zalecane więcej) oraz długość wyznaczanego wektora (nie powinna przekraczać 10 km). Jeśli wszystkie te warunki są spełnione, można uzyskać najwyższe, milimetrowe dokładności na podstawie 10-15 -minutowych sesji obserwacyjnych.
Metoda stop-and-go
W tej metodzie przed wykonaniem pomiaru należy dokonać inicjalizacji (wyznaczenie ambiguity) odbiornika poprzez pomiar statyczny wektora około od 10min do 60 min. Podczas pomiaru nie wolno stracić kontaktu z satelitami przy przejściu od punktu do punktu. Pomiar wykonuje się po przeprowadzeniu inicjalizacji stojąc na każdym punkcie około 2-3 min. i następnie przejście na następny punkt
Metoda pseudokinematyczna
Metoda ta zakłada pomiar dwukrotny punktów, na każdym punkcie stoimy 5 minut nastepnie przechodzimy do następnego, po 1h wracamy i znowu mierzymy ten sam punkt. W tej metodzie można utracić kontakt z satelitą przy przejściu z jednego punktu na drugi.
Metoda RTK
Technika RTK (Real-Time Kinematic) wykorzystuje pomiary fazowe. Pozycjonowanie tą techniką daje dokładności rzędu 1-2 cm, przy bardzo krótkich czasach obserwacji. Technika ta także wymaga odbiornika umieszczonego na stacji referencyjnej, o znanych współrzędnych oraz odpowiedniego sprzętu, zapewniającego łączność radiową (lub Gorsz telefoni komórkowej) z odbiornikami ruchomymi. W technice RTK stacja referencyjna emituje informacje dotyczące pomiarów fazowych (surowe pomiary fazowe oraz poprawki). Czas, jaki jest potrzebny na osiągnięcie tak wysokich dokładności wyznaczenia współrzędnych zależy od ilości satelitów (minimum 5) oraz od odległości do stacji referencyjnej (maksymalnie 10 km). Szybkość przesyłania informacji musi wynosić przynajmniej 9600 bitów/sekundę.
Algorytmy stosowane w technice RTK muszą zapewniać odpowiednie rozwiązanie w bardzo krótkim czasie, na podstawie niewielkiej liczby obserwacji (krótki czas obserwacji). Znanych i stosowanych w praktyce jest wiele różnych metod obliczeń, spełniających te wymogi. Wiele z tych algorytmów wykorzystuje np. filtr Kalmana, definiując (w ogólności) układ równań dynamicznych (uwzględniających, poprzez tzw. macierz przejścia, dynamikę układu), w których niewiadomymi są współrzędne trójwymiarowe odbiornika ruchomego, ewentualnie jego prędkość i przyspieszenie, parametry ambiguity oraz opóźnienie jonosferyczne.
GGk 22 Serwisy systemu ASG-EUPOS
Serwisy czasu rzeczywistego to NAWGIS, KODGIS oraz NAWGEO opierają się o zasadę pomiarów różnicowych DGNSS oraz RTK, wykorzystujących stacje referencyjne. Wymiana danych między odbiornikiem a Centrum Obliczeniowym, odbywa się w czasie rzeczywistym poprzez wykorzystanie połączenia internetowego GPRS, dlatego wyniki otrzymywane są bezpośrednio w terenie. W zależności od zastosowanego sprzętu oraz metody pomiaru można tu uzyskać dokładności mieszczące się w przedziale od 3m do 3cm.
Serwisy NAWGIS i KODGIS, zbliżone do siebie pod względem sposobu działania, przeznaczone są do mniej dokładnych wyznaczeń współrzędnych, głównie w pomiarach GIS oraz nawigacji, przy użyciu tańszych, kodowych odbiorników GNSS.
KODGIS- Poprawki w formacie RTCM pozwalające w zależności od rodzaju odbiornika
osiągnąć dokładności do 0.25m. Odbiór poprawek odbywa się poprzez GPRS.
NAWGIS- Poprawki w formacie RTCM do odbiorników nawigacyjnych. Dokładność do 3 m. Odbiór poprawek odbywa się poprzez GPRS.
NAWGEO to podstawowy produkt systemu ASG-EUPOS i ze względu na wysoką dokładność uzyskiwanych pomiarów polecany jest głównie pomiarom geodezyjnym. Jest to najdokładniejszy serwis czasu rzeczywistego umożliwiający realizację pomiarów sytuacyjno - wysokościowych. Poprawki RTK w formacie RTCM, RTCM FKP, RTCM VRS z wybranej stacji lub z systemu. Wymagany dwuczęstotliwościowy odbiornik z możliwością pracy w systemach powierzchniowych RTK. System umożliwia generowanie poprawek w postaci wirtualnej stacji (VRS) jak i poprawek powierzchniowych w formacie FKP. Dokładność do 0,03 m (poz.) oraz
do 0,05 m (pion.)
Serwisy postprocessingu POZGEO oraz POZGEO D związane są z pomiarami statycznymi a wysoka dokładność jest zależna od otoczenia pomiarowego, klasy sprzętu GNSS oraz czasu pomiarów. Oba serwisy realizowane są przez stronę internetową systemu ASG-EUPOS, przy czym POZGEO D przeznaczony jest dla użytkowników obeznanych z metodyką opracowania obserwacji satelitarnych. Zadaniem serwisu POZGEO D jest udostępnianie plików obserwacyjnych ze stacji referencyjnych systemu a także tworzenie wirtualnych stacji referencyjnych, na podstawie parametrów nadanych przez użytkownika. POZGEO natomiast, jest serwisem służącym do automatycznego opracowania obserwacji satelitarnych w oparciu o najbliższe stacje referencyjne, wykonanych metodą statyczną, z deklarowanym błędem średnim wyznaczenia współrzędnych nie większym niż 0.01 m, przy wykorzystaniu odbiornika (L1/L2) i nie większym niż 0.10 m, przy wykorzystaniu odbiornika tylko jedno-częstotliwościowego (L1)
Serwis pomocy technicznej jest stworzony głównie dla użytkowników systemu jak również dla osób, które chcą otrzymać fachową informację o satelitarnych systemach nawigacyjnych czy też sprzęcie pomiarowym i jego wykorzystaniu. Produkt ten jest wsparciem technicznym dla użytkowników systemu, którzy w razie problemów z systemem lub jego wykorzystaniem, mogą liczyć na pomoc specjalistów.
RODZAJ SERWISU |
NAZWA |
METODA POMIARU |
DOKŁADNOŚĆ |
MINIMUM SPRZĘTOWE |
Serwis czasu rzeczywistego |
NAWGEO |
kinematyczna (RTK) |
do 0,03 m (poz.) |
Odbiornik L1/L2 RTK, |
|
KODGIS |
kinematyczna (DGPS) |
do 0,25 m |
Odbiornik L1 DGPS, |
|
NAWGIS |
|
do 3 m |
|
Serwis postprocessingu |
POZGEO |
statyczna, szybka statyczna |
0,01 ÷ 0,10 m
zależnie od warunków |
Odbiornik L1 |
|
POZGEO D |
|
|
|
Serwisy czasu rzeczywistego
Serwisy czasu rzeczywistego opierają się o zasadę pomiarów różnicowych DGNSS (ang. Differential GNSS) oraz RTK (ang. Real-Time Kinematic) wykonywanych w oparciu o stacje referencyjne. Odbiorniki wykonujące pomiary w terenie komunikują się z Centrum Obliczeniowym, w celu uzyskania korekt obserwacyjnych do pomiarów GNSS. Cały proces wymiany danych odbywa się w czasie rzeczywistym poprzez wykorzystanie połączenia internetowego GPRS, w związku z czym użytkownik otrzymuje wyniki bezpośrednio w terenie.
W zależności od metody pomiarów (DGPS/RTK) oraz rodzaju sprzętu pomiarowego (L1 lub L1/L2) dokładności uzyskiwane w pomiarach wahają się od 3 m do 3 cm. Serwisy NAWGIS i KODGIS znajdują zastosowanie głównie w pomiarach GIS oraz nawigacji. Serwis NAWGEO jest najdokładniejszym serwisem wykorzystywanym w szerokim spektrum prac geodezyjnych. W ramach NAWGEO użytkownika ma do wyboru obecnie funkcjonujące formaty poprawek tj. MAC (ang. Master and Auxiliary Concept), VRS (ang. Virtual Reference Station), FKP (niem. Flächenkorrekturparameter).
Serwisy postprocessingu
Serwisy post-processingu przeznaczone są dla użytkowników pracujących z pomiarami statycznymi. Wysoka dokładność jaką charakteryzują się te pomiary uwarunkowana jest doborem otoczenia pomiarowego, klasy sprzętu GNSS oraz czasem pomiarów.
W ręce użytkowników oddane zostały dwa serwisy POZGEO oraz POZGEO D. Pierwszy z nich umożliwia wysłanie pliku obserwacyjnego do automatycznych obliczeń. Po pozytywnej weryfikacji przesłanego pliku i wykonaniu obliczeń, użytkownik otrzymuje raport z obliczeń ze współrzędnymi wyznaczanego punktu w obecnie funkcjonujących polskich układach odniesienia. Serwis POZGEO D przeznaczony jest dla użytkowników obeznanych z metodyką opracowania obserwacji satelitarnych. Jego zadaniem jest udostępnianie plików obserwacyjnych ze stacji referencyjnych systemu ASG-EUPOS oraz utworzonych wirtualnych stacji referencyjnych, na podstawie parametrów zadanych przez użytkownika.
Serwisy post-processingu, pod względem otrzymywanych dokładności, są alternatywą dla serwisu NAWGEO w terenach o niewystarczającym zasięgu sieci GPRS.
Serwis wsparcia technicznego
Wsparcie techniczne świadczone użytkownikom systemu ASG-EUPOS jest kolejnym z grupy serwisów systemu. Jego głównym celem jest umożliwienie użytkownikom jak najlepszego wykorzystania możliwości systemu. Problemy ze sprzętem pomiarowym, metodyką pomiarów satelitarnych oraz sprawy związane z funkcjonowaniem systemu rozwiązywane przez użytkowników razem z grupa specjalistów służących swoją wiedzą i doświadczeniem.
Z serwisu technicznego mogą korzystać nie tylko wykonawcy pomiarów satelitarnych, ale również osoby, które chcą otrzymać fachową informację na temat satelitarnych systemów nawigacyjnych, sprzętu pomiarowego, literatury fachowej, itp.
Serwisy dedykowane
Oprogramowanie funkcjonujące na potrzeby systemu ASG-EUPOS zapewnia elastyczność pod względem dostosowania systemu oraz definiowania dodatkowych serwisów. Dlatego też, możliwe jest wygenerowanie dedykowanych serwisów czasu rzeczywistego lub post-processingu dla użytkowników potrzebujących indywidualnych rozwiązań z zakresu pomiarów i nawigacji satelitarnej GNSS. Aby rozpocząć współpracę zachęcamy do skontaktowania się z biurem systemu ASG-EUPOS (biuro.eupos@gugik.gov.pl) oraz przedstawienia propozycji współpracy.
NAWGEO
NAWGEO to podstawowy serwis systemu ASG-EUPOS udostępniający poprawki do pomiarów w czasie rzeczywistym RTK. Umożliwia uzyskiwanie najwyższych dokładności zarówno w pomiarach kinematycznych, jak i określaniu położenia obiektów statycznych. Dzięki wielu dostępnym formatom poprawek, serwis NAWGEO pozwala użytkownikowi wykorzystać szeroką gamę sprzętu pomiarowego dostępnego na rynku. Ze względu na możliwą do uzyskania wysoką dokładność pomiarów, serwis NAWGEO dedykowany jest przede wszystkim pomiarom geodezyjnym.
Najwyższe dokładności w pomiarach satelitarnych w czasie rzeczywistym można uzyskać wykorzystując dostępne w serwisie NAWGEO sieciowe poprawki RTK (ang. Real-Time Kinematics). Ich przewaga nad poprawkami z pojedynczej stacji referencyjnej wynika z możliwości lepszego modelowania systematycznych błędów związanych m.in. z pracą zegarów atomowych na satelitach oraz opóźnień związanych z propagacją sygnału w atmosferze. Co za tym idzie, wykorzystanie sieciowych poprawek RTK umożliwia powtarzalność wyznaczeń współrzędnych bez względu na odległość odbiornika od fizycznej stacji referencyjnej. Należy pamiętać, że przy wykorzystaniu poprawek z pojedynczej stacji referencyjnej błąd wyznaczenia współrzędnych wzrasta wraz ze wzrostem odległości od stacji, z której pochodzą poprawki. Dlatego zalecane jest stosowanie poprawek sieciowych w pomiarach RTK wszędzie tam gdzie jest to tylko możliwe.
W systemie ASG-EUPOS udostępniane są trzy rodzaje poprawkek sieciowych: VRS (ang. Virtual Reference Station), MAC (ang. Master and Auxiliary Concept) oraz FKP (niem. Flächenkorrekturparameter). Dla użytkownika nie jest istotne, z którego formatu korzysta ponieważ informacje w nich zawarte generowane są przez to samo oprogramowanie i dają bardzo zbliżone rezultaty. Testy przeprowadzone przez wykonawcę systemu oraz zewnętrzne podmioty potwierdzają, że w optymalnych warunkach pomiarowych wszystkie poprawki pozwalają osiągnąć powtarzalność wyznaczeń w granicach ±0,03 m w poziomie i ±0,05 m w pionie.
Do wygenerowania strumienia poprawek w oparciu o dane z grupy stacji ASG-EUPOS, system obliczeniowy musi mieć informację o przybliżonej pozycji użytkownika, przesyłanej w depeszy NMEA GGA. w odpowiedzi na przybliżoną pozycję użytkownika, moduł obliczeniowy systemu ASG-EUPOS generuje strumień poprawek sieciowych w wybranym formacie i przesyła go protokołem NTRIP w formacie RTCM.
W serwisie NAWGEO, poza rozwiązaniami sieciowymi, dostępne są także tradycyjne poprawki RTK z pojedynczej, wybranej przez użytkownika stacji referencyjnej. Nie wymaga to od użytkownika przesłania danych o jego pozycji i jest stosowane w starszych typach odbiorników GNSS. Komunikacja użytkownika z siecią ASG-EUPOS odbywa się z wykorzystaniem protokołu NTRIP. Poprawki z pojedynczych stacji referencyjnych dostępne są w systemie ASG-EUPOS wyłącznie dla stacji położonych na terenie kraju.
Po zalogowaniu się na serwerze systemu użytkownik wybiera odpowiadający mu strumień danych korekcyjnych. Poniżej wyszczególniono wszystkie dostępne w serwisie NAWGEO formaty poprawek z podziałem na porty, na których są udostępnione:
Należy pamiętać, że podobnie jak w przypadku pozostałych serwisów czasu rzeczywistego systemu ASG-EUPOS, dane przesyłane są protokołem NTRIP, wymagającym od użytkownika autoryzacji poprzez podanie loginu i hasła. Dane do logowania w serwisach ASG-EUPOS użytkownik otrzymuje po zarejestrowaniu się w systemie.
KODGIS
Istnieje duża grupa użytkowników, dla których wysoka dokładność metod RTK jest zbyteczna, natomiast dokładność pozycji autonomicznej jest zbyt niska. System ASG-EUPOS pozwala na uzyskanie podwyższonej dokładności pomiarów w trybie różnicowym DGNSS przy zastosowanie odbiorników jednoczęstotliwościowych.
Serwisy KODGIS i NAWGIS, zbliżone do siebie pod względem sposobu działania, przeznaczone są do mniej dokładnych wyznaczeń współrzędnych przy użyciu tańszych, kodowych odbiorników GNSS. Standardowy format RTCM zastosowany w serwisie KODGIS jest rozpoznawany przez wszystkie odbiorniki wyposażone w funkcję DGPS.
Serwis KODGIS przeznaczony jest głównie do wykonywania pomiarów na potrzeby budowy lub aktualizacji systemów informacji przestrzennej. Dla tego typu systemów wyznaczenie współrzędnych z dokładnością kilkudziesięciu centymetrów jest w zupełności wystarczające. Serwis KODGIS może być również wykorzystywany do wspomagania służb ratowniczych, w archeologii, rolnictwie, leśnictwie, energetyce, telekomunikacji, turystyce i rekreacji, automatycznej nawigacji, itp. Wszędzie tam użytkownicy mogą stosować tańsze kodowe odbiorniki jednoczęstotliwościowe i korzystać z poprawek serwisu KODGIS, celem podniesienia dokładności wyznaczanych współrzędnych.
Wykorzystując poprawki serwisu KODGIS można uzyskać powtarzalność wyznaczeń współrzędnych nie gorszą niż ±0,25 m w poziomie, co sprawia że wiele firm zajmujących się opracowaniami kartograficznymi i GIS będzie mogło wykorzystać ten serwis do wykonania niezbędnych pomiarów. Żeby system ASG-EUPOS mógł wygenerować poprawki dla danego użytkownika o takiej dokładności wymagane jest przesłanie przybliżonej pozycji odbiornika w formacie NMEA GGA. Podobnie jak w przypadku poprawek RTK system generuje poprawkę właściwą dla danego rejonu i wysyła ją do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu KODGIS zawierają jedynie poprawki kodowe. Poniższa tabela przedstawia numery i interwały wiadomości RTCM wysyłanych do użytkownika serwisu KODGIS podczas wykonywania pomiaru.
Należy pamiętać, że podobnie jak w przypadku pozostałych serwisów czasu rzeczywistego systemu ASG-EUPOS, dane przesyłane są protokołem NTRIP, wymagającym od użytkownika autoryzacji poprzez podanie loginu i hasła. Dane do logowania w serwisach ASG-EUPOS użytkownik otrzymuje po zarejestrowaniu się w systemie.
NAWGIS
Istnieje duża grupa użytkowników, dla których wysoka dokładność metod RTK jest zbyteczna, natomiast dokładność pozycji autonomicznej jest zbyt niska. System ASG-EUPOS pozwala na uzyskanie podwyższonej dokładności pomiarów w trybie różnicowym DGNSS przy zastosowanie odbiorników jednoczęstotliwościowych.
Serwisy NAWGIS i KODGIS, zbliżone do siebie pod względem sposobu działania, przeznaczone są do mniej dokładnych wyznaczeń współrzędnych przy użyciu tańszych, kodowych odbiorników GNSS. Standardowy format RTCM zastosowany w serwisie NAWGIS jest rozpoznawany przez wszystkie odbiorniki wyposażone w funkcję DGPS.
Użytkownicy wymagający pozycjonowania z dokładnością do kilku metrów (do ok. 3 m), wyposażeni w odbiorniki GNSS mogące odbierać przynajmniej poprawki obserwacyjne DGNSS w formacie RTCM, będą zainteresowani serwisem NAWGIS. Odbiór poprawek DGNSS w tym serwisie nie wymaga dwukierunkowej komunikacji z Centrum Zarządzającym, tj. w przypadku dokładniejszego serwisu KODGIS. Nie jest wymagane przesłanie do systemu przybliżonej pozycji odbiornika, zatem z serwisu NAWGI korzystać mogą użytkownicy wyposażeni w jeszcze prostsze odbiorniki kodowe. Poprawki DGNSS wyznaczane są, w zależności od wymagań, z północnej lub południowej podsieci stacji referencyjnych dla jej punktu środkowego i przesyłane w formacie RTCM przez Internet protokołem NTRIP.
Serwis NAWGIS dostępny jest - podobnie jak pozostałe usługi systemu ASG-EUPOS - jedynie dla zarejestrowanych użytkowników, jednakże z założenia ma być on serwisem darmowym, dostępnym dla wszystkich zainteresowanych.
Podobnie jak w przypadku poprawek RTK z pojedynczych stacji referencyjnych system generuje poprawkę właściwą dla danej części kraju (północnej lub południowej) i wysyła ją do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu NAWGIS zawierają jedynie poprawki kodowe. Poniższa tabela przedstawia numery i interwały wiadomości RTCM wysyłanych do użytkownika serwisu NAWGIS podczas wykonywania pomiaru.
Należy pamiętać, że podobnie jak w przypadku pozostałych serwisów czasu rzeczywistego systemu ASG-EUPOS, dane przesyłane są protokołem NTRIP, wymagającym od użytkownika autoryzacji poprzez podanie loginu i hasła. Dane do logowania w serwisach ASG-EUPOS użytkownik otrzymuje po zarejestrowaniu się w systemie.
POZGEO
Serwis POZGEO przeznaczony jest do obliczeń w trybie postprocessingu obserwacji GPS wykonywanych metodą statyczną. Do obliczeń wykorzystywane są obserwacje fazowe z odbiorników jedno i dwuczęstotliwościowych, przekonwertowane do ustalonego formatu danych obserwacyjnych.
Dostęp do serwisu realizowany jest przez stronę internetową systemu. Po zalogowaniu się użytkownik może przesłać dane obserwacyjne za pomocą przygotowanego formularza zgłoszeń. Po przesłaniu pliku obserwacyjnego, jest on sprawdzany pod względem poprawności formatu, a następnie przekazywany do aplikacji automatycznego postprocessingu realizowanego poprzez Automatic Postprocessing Software for Trimble Application (APPS). Oprogramowanie prowadzi obliczenia bazując na podwójnych różnicach obserwacji fazowych. Dodatkową cecha oprogramowania jest korzystanie z absolutnych kalibracji dla anten GPS.
Obliczenia dla przesłanych plików obserwacyjnych wykonywane są w oparciu o 6 najbliższych stacji referencyjnych, do których wyznaczone wektory spełniają określone kryteria dokładnościowe. Na ich podstawie realizowane jest wyrównanie, którego wynikiem są współrzędne stacji w układzie ETRF2000 (ang. European Terrestrial Reference Frame). Dodatkowo współrzędne są przeliczane do układów 2000, 1992 oraz 1965. w zależności od daty wprowadzenia pliku obserwacyjnego do obliczeń używane są orbity nawigacyjne, IGS-rapid lub IGS-final.
Wysokość anteny w pliku Rinex (wpisywana w lini ANTENNA: DELTA H/E/N) powinna być odniesiona do punktu ARP (ang. Antenna Reference Point). Punkt ten zazwyczaj okreslany jest jako spód mocowania anteny.
Okres obserwacji:
Pliki obserwacyjne przesyłane do obliczeń powinny być dłuższe niż 15 minut i krótsze niż 24 godziny. Przy czym musza spełniać dodatkowe warunki odnośnie ilości zarejestrowanych epok pomiarowych.
Minimalna liczba epok dla których wykonywane są obliczenia to 720 (np. 15 minut obserwacji z interwałem 1 sekundy). Pliki obserwacyjne nie spełniające tego warunku są automatycznie odrzucane.
Maksymalna liczba wykorzystywanych epok: 3600 (np. 1 h obserwacji z interwałem 1 sekundy). w przypadku przekroczenia tej wartości, obserwacje są rozrzedzane do mniejszego interwału będącego wielokrotnością formatu podstawowego (np. z interwału 5 sekund do 10 sekund).
POZGEO D
Serwis POZGEO D przeznaczony jest dla użytkowników obeznanych z metodyką opracowania obserwacji satelitarnych. Jego zadaniem jest udostępnianie plików obserwacyjnych ze stacji referencyjnych systemu ASG-EUPOS oraz utworzonych wirtualnych stacji referencyjnych, na podstawie parametrów zadanych przez użytkownika.
Parametry wprowadzane przez użytkownika dotyczą wyboru stacji referencyjnych, określenia daty obserwacji, długości sesji obserwacyjnych oraz interwału rejestracji. w przypadku stacji wirtualnej należy dodatkowo określić współrzędne, dla których ma być wygenerowana. Serwis POZGEO D, podobnie jak serwis POZGEO realizowany jest poprzez stronę www systemu ASG-EUPOS. Przygotowane przez system pliki obserwacyjne pozostawiane są na serwerze www do pobrania lub wysyłane są na e-mail, określony przez użytkownika. Formaty w jakich udostępniane są dane obserwacyjne to RINEX 2.1x oraz skompresowany Compact RINEX (Hatanaka).
Ze względu na dodatkową możliwość wygenerowania wirtualnych stacji referencyjnych, użytkownik może opracować dane obserwacyjne w oparciu o dwa podejścia. Pierwsze jest klasycznym przykładem dla postprocessingu, w którym stacje referencyjne ASG-EUPOS stanowią nawiązanie dla sieci wyznaczanych wektorów. Uzyskiwana dokładność uzależniona jest od klasy sprzętu pomiarowego, środowiska pomiarowego oraz długości sesji obserwacyjnej.
Drugie podejście wykorzystujące wirtualne stacje referencyjne pozwala na poprawienie dokładności obliczeń dla krótkich sesji obserwacyjnych. Dokładność wyznaczanego wektora pozostaje w zależności od jego długości i czasu obserwacji tj. im dłuższe wektory, zalecana jest dłuższa sesja obserwacyjna. w przypadku krótkiej sesji obserwacyjnej zalecane jest skrócenie wyznaczanych wektorów poprzez utworzenie w otoczeniu wyznaczanego punktu wirtualnych stacji referencyjnych, które stanowią nawiązanie.
W przypadku generowania wirtualnych stacji referencyjnych należy pamiętać że plik obserwacyjny jest przygotowywany w oparciu o najbliższą stację referencyjną. Aby zagwarantować poprawność obliczeń należy tak wybierać współrzędne stacji wirtualnych aby były generowane w oparciu o różne stacje fizyczne.
Ze względu na dokładność oraz stosowaną technologię, pomiary różnicowe w czasie rzeczywistym dzielimy na pomiary RTK (ang. Real-Time Kinematic) oraz pomiary DGPS (ang. Differential GPS).
GGk 25 Właściwości liczby geopotencjalnej oraz jej znaczenie w definiowaniu systemów wysokościowych.
Liczba geopotencjalna - Różnica wartości potencjałów siły ciężkości na powierzchni geoidy W0 oraz w danym punkcie Wp. Powstaje przez całkowanie równania dW= -gdh w granicach od W0 do Wp.
Liczba geopotencjalna wyraża pracę w polu potencjalnym niezależną od drogi. Ten parametr wykorzystuje się w definicji wysokości.
Wysokość ortometryczna jest równa długości odcinka linii pionu od geoidy do punktu P.
![]()
Praktyczne wyznaczenie przeciętnej wartości przyśpieszenia siły ciężkości Ziemi ![]()
według wzoru jest niemożliwe bez hipotetycznego przyjęcia rozkładu gęstości mas Ziemi wzdłuż linii pionu na odcinku O-P.
Wysokość dynamiczna powstaje poprzez podzielenie liczby geopotencjalnej C przez tzw. przyspieszenie normalne ![]()
obliczone dla pewnego modelu rozkładu masy w globie ziemskim na poziomie morza i dla szerokości geograficznej 45°. Wysokości dynamiczne charakteryzują się tym, że punkty wybranej powierzchni poziomej mają te same wysokości dynamiczne.
![]()
Wysokość normalną oblicza się poprzez podzielenie liczby geopotencjalnej C przez średnią wartość przyspieszenia siły ciężkości ![]()
mierzonego wzdłuż linii pionu normalnego pola siły ciężkości. Spodki wysokości normalnych wyznaczają powierzchnię tzw. quasigeoidy różniącej się od geoidy na obszarach lądów nie będącej powierzchnią ekwipotencjalną.
![]()
Wysokość normalna jest to odległość quasigeoidy od FPZ lub odległość elipsoidy od telluroidy.
GGk 26: Transformacje sieci z układu 1965 lub lokalnego do układu 2000 (1992).
Podstawową wadą transformacji jest fakt przeniesienia deformacji i błędów układu pierwotnego do układu wtórnego. W omawianym przypadku mamy sytuację, w której układ wtórny (2000, 1992) charakteryzuje się znacznie wyższą dokładnością oraz jednorodnością współrzędnych punktów niż układ pierwotny (1965 lub układy lokalne).
Jak zostało wcześniej wspomniane jedyną dopuszczalną metodą przeliczenia współrzędnych jest zgodnie z Instrukcją Techniczną G-2 konforemna transformacja 4-parametrowa (przez powinowactwo) z usunięciem odchyłek na punktach łącznych metodą Hausbrandta.
Poszczególne etapy prac, jakie powinny być wykonane przedstawiają się następująco:
![]()
Pełna procedura przeliczeń z układu 1965 do układu 2000 składa się z czerech kroków: dwóch transformacji i dwóch odwzorowań:
Krok [1] Odwzorowanie współrzędnych płaskich xy w układzie 1965 do współrzędnych geograficznych BL na elipsoidzie Krasowskiego. Dla stref I-IV jest to odwzorowanie quasi - stereograficzne, dla strefy V odwzorowanie Gaussa-Krügera,
Krok [2] 7-parametrowa transformacja Helmerta współrzędnych przestrzennych XYZ (BLH) z układu 1942 (elipsoida Krasowskiego) do układu EUREF89 (elipsoida GRS1980). Do tego celu wystarczy wykorzystać parametry transformacji wyznaczone dla całej Polski z sieci POLREF.
Krok [3] Odwzorowanie współrzędnych geograficznych BL na elipsoidzie GRS1980 na współrzędne płaskie xy w odwzorowaniu Gaussa-Krügera dla stałych układu 2000 (1992). Ze względu na dokładność transformacji 7-parametrowej takie współrzędne mogą różnić się od współrzędnych w układzie 2000 (różnice nie powinny przekraczać 1m),
Krok [4] Konforemna transformacja płaska 4-parametrowa z usunięciem odchyłek na punktach łącznych metodą Hausbrandta. W wyniku otrzymamy współrzędne dostosowane do układu państwowego 2000 (1992). Błąd transformacji wyznaczony z odchyłek na punktach łącznych przyjmowany jest jako błąd położenia punktu:

gdzie:
Vx ,Vy - odchyłki współrzędnych x,y dla punktów łącznych,
n - liczba punktów łącznych.
Błąd transformacji nie powinien przekraczać ±0.05m.
Ponieważ w trakcie omawianej procedury przeliczeniowej współrzędne pierwotne zostają wyrażone w układzie zgodnym z układem wtórnym nie ma teoretycznie ograniczeń powierzchniowych jej stosowania. Doświadczenia praktyczne wskazują jednak, że obszar ten nie powinien przekraczać 20-30 km rozciągłości. Przy większych obszarach lokalne deformacje układu 1965 powodować będą błędy średnie transformacji powyżej dopuszczalnej wartości.
GGk 27. Mapy do celów projektowych (zasięg, skale, podstawy prawne)
Treść mapy do celów projektowych poza elementami stanowiącymi treść mapy zasadniczej powinna zawierać:
Opracowane geodezyjnie linie rozgraniczające tereny o różnym przeznaczeniu, linie zabudowy oraz osie ulic
Usytuowanie zieleni wysokiej
Usytuowanie innych obiektów i szczegółów wskazanych przez projektanta
Zasięg:
Mapa do celów projektowych powinna obejmować teren inwestycji, jak również obszar otaczający teren w pasie, co najmniej 30 m. Jeżeli dla terenu ustalono strefę ochronną, wówczas obszar przedstawiony na mapie projektu powinien obejmować także teren tej strefy.
Skala map do celów projektowych zależy od rodzaju i wielkości inwestycji.
Typowe skale:
skala map działek budowlanych nie powinna być mniejsza niż 1: 500
Skala map zespołów obiektów budowlanych oraz terenów budownictwa przemysłowego nie powinna być mniejsza niż 1: 1000,
Skala map rozległych terenów z obiektami budowlanymi o dużym rozproszeniu oraz z obiektami liniowymi może wynosić 1: 2000
Podstawy prawne:
Ustawa Prawo budowlane z 7 lipca 1994 roku
Rozporządzenie Ministra Gospodarki Przestrzennej i Budownictwa z dnia 21 lutego 1995 roku w sprawie rodzaju i zakresu opracowań geodezyjno-kartograficznych oraz czynności geodezyjnych obowiązujących w budownictwie.
GGk 28. GESUT cel prowadzenia, zakres
Definicje:
GESUT jest to uporządkowany zbiór informacji przestrzennych i opisowych o:
-uzbrojeniu terenu (przedmioty GESUT - przewody sieci uzbrojenia terenu oraz budowle podziemne)
-podmiotach nim zarządzających.
Są to w szczególności inf. o:
Rodzajach przewodów,
Położeniu przewodów,
Nazwa, siedziba lub adres właściciela sieci uzbrojenia terenu lub jednostki organizacyjnej zarządzającej siecią,
Sposobie uzyskania danych o przewodzie.
Uzbrojenie terenu to wszelkiego rodzaju nadziemne, naziemne i podziemne przewody i urządzenia wodociągowe, kanalizacyjne, gazowe, cieplne, telekomunikacyjne, elektroenergetyczne i inne, z wyłączeniem urządzeń melioracji szczegółowych, a także podziemne budowle jak: tunele, przejścia, parkingi, zbiorniki itp.
Podstawowym elementem ewidencji jest przewód stanowiący liniowy fragment sieci uzbrojenia terenu określonego rodzaju. Dla każdego rodzaju przewodu prowadzi się operat ewidencyjny.
Cel prowadzenia:
GESUT zakłada się i prowadzi aby dostarczyć informacji:
dla celów inwestycyjnych, projektowych i realizacyjnych w szczególności dla zapobieżenia kolizjom istniejących i projektowanych SUT w ramach prac ZUDP,
dla uzupełnienia mapy zasadniczej,
dla założenia ewidencji branżowych przez podmioty zarządzające sieciami.
.
Zakres treści GESUT
1.Obiekty G7
Przedmiotem GESUT są obiekty zdefiniowane w instrukcji G-7.(Obiekty te, w celu odróżnienia od obiektów innych Instrukcji (np. Instrukcji K-1), dalej oznaczane będą jako obiekty G7).
Obiekty G7 dzieli się na:
Obiekty sieci uzbrojenia terenu (obiekty SUT),
Obiekty dodatkowe.
2. Dane GESUT obejmują:
Informacje przestrzenne (współrzędne płaskie w układzie mapy zasadniczej),
Informacje opisowe (podmiotowe, przedmiotowe),
GESUT uzupełnia dane mapy zasadniczej, która jest mapą dwuwymiarową, z tego względu współrzędna wysokościowa w GESUT jest traktowana, tak jak w mapie zasadniczej, jako informacja opisowa.
Informacje opisowe zawarte są w bazie danych systemu prowadzącego GESUT i każda z nich może być elementem klucza wyszukiwania obiektów.
Opisowe informacje podmiotowe odnoszą się do właścicieli i administratorów sieci. Są to: nazwa lub imię i nazwisko, dane adresowe i telekomunikacyjne podmiotu.
Opisowe informacje przedmiotowe odnoszą się do obiektów SUT i obiektu Budowla Podziemna.
W skład danych przedmiotowych wchodzą:
kod obiektu zawierający rodzaj sieci, typ sieci i kategorię obiektu,
identyfikator (kolejny lub strukturalny) uzgodniony z administratorem sieci,
nazwa branżowa,
właściciel,
administrator,
jednostka ewidencji gruntów,
nr obrębu ewidencji gruntów,
nr działki ewidencyjnej,
ulica,
nr adresowy (dotyczy przyłączy i niektórych obiektów punktowych),
funkcja (dotyczy przewodów),
współrzędne wysokościowe,
status przewodu,
rodzaj źródła danych o położeniu,
materiał,
liczba przewodów,
zewnętrzny wymiar poziomy (dotyczy przewodów),
zewnętrzny wymiar pionowy przewodu (dotyczy przewodów, których wymiar pionowy może różnić się od poziomego),
historię obiektu, a w niej daty wprowadzonych zmian, identyfikator osoby wprowadzającej zmianę i opis zmiany.
Podkreślone wyżej dane są uwidoczniane na mapie zasadniczej, tj. stanowią widoczne atrybuty opisowe obiektów przedstawianych na mapie.
Podstawa prawna
Podstawę prawną zakładania, prowadzenia i udostępniania GESUT stanowią:
Ustawa Prawo geodezyjne i kartograficzne z dn. 17 maja 1989
Rozporządzenie Ministra Rozwoju Regionalnego i Budownictwa z dnia 2 kwietnia 2001 r. w sprawie geodezyjnej ewidencji sieci uzbrojenia terenu oraz zespołów uzgadniania dokumentacji projektowej.
Szczegółowe ustalenia techniczne związane z zagadaniem i prowadzeniem geodezyjnej inwentaryzacji sieci uzbrojenia terenu określa instrukcja techniczna G-7 „Geodezyjna inwentaryzacja sieci uzbrojenia terenu - GESUT”
GGk29 Przemieszczenie odkształcenie, odchyłka projektowa
Przemieszczeniem elementu konstrukcyjnego lub obiektu jest zmiana położenia poszczególnych części tego obiektu względem otoczenia (układu odniesienia) w określonym przedziale czasu. Przemieszczenie wyraża się przez wektor w przestrzeni trójwymiarowej, czwartą składowa jest czas.
- przemieszczenie poziome - pozioma składowa wektora przemieszczeń punktu
-przemieszczenie pionowe - pionowa składowa wektora przemieszczeń punktu
Zmiana położenia obiektu polega na przesunięciu albo obrocie lub przesunięciu i obrocie, przy której wzajemne odległości wszystkich punktów obiektu nie ulegają zmianie
(Translacje i rotacje)
Wielkości przemieszczeń uzyskujemy przez porównanie wyników pomiarów okresowych z pomiarem uznanym za wyjściowy.
Przemieszczenie:
-względne - służy do wyznaczania względnych zmian składowych przemieszczeń, nie dają wartości odniesionych do stałego układu odniesienia. Może to być pomiar zmian: Odległości, wysokości, odchyłka od płaszczyzny poziomej lub pionowej
-bezwzględne - wyznaczają ruchy poszczególnych punktów obserwacyjnych względem stałego układu odniesienia
Odkształcenie elementu konstrukcyjnego lub obiektu to zmiana kształtu lub wymiarów tego obiektu, związana ze zmianą wzajemnych odległości jego punktów, powstałą w określonym odstępie czasu. Odkształcenie możemy stwierdzić na podstawie pomiarów względnych.
Odkształcenie = deformacja
Odkształcenie to pomiar dwukrotny (t0, t1)
Odchyłka projektowa to różnica między rzeczywistym wymiarem obiektu a wymiarem projektowym. Do wyznaczenia odchyłek wystarczy jednokrotny pomiar kształtu i wymiarów obiektu. Istnieją dopuszczalne odchyłki wykonania i montażu konstrukcji budowlanych. Wielkości opisanych odchyłek regulują Polskie Normy.
GGk 30 Pomiary deformacji i przemieszczeń
1. Odkształcenia obiektu- zmiana kształtu lub objętości albo zmiana kształtu i objętości obiektu powodująca zmiany wzajemnych odległości jego punktów. Odkształcenia obiektu mogą być liniowe, postaciowe, objętościowe, trwałe, sprężyste lub graniczne.
2. Przemieszczenia obiektu- zmiana położenia obiektu polegająca na przesunięciu albo obrocie lub przesunięciu i obrocie, przy której- wzajemne odległości wszystkich punktów obiektu nie ulegają zmianie. Przemieszczenia obiektów mogą być trwałe, nietrwale lub graniczne.
3. Przemieszczenia podłoża obiektu.
Zmiany budowli mogą być wyznaczone z wyników pomiarów, pod warunkiem istnienia wcześniejszych pomiarów, z których wynikami można je porównać.
Budowle o szczególnych cechach (np. zapory, kominy, mosty)- ich dynamika musi być badana w czasie ich eksploatacji, a czasem też w procesie wznoszenia, powinny mieć wykonany pomiar pierwotny.
Zaleca się, aby takie budowle miały stałe, specjalnie zaprojektowane, służące do wykonania pomiaru pierwotnego oraz następnych:
- punkty kontrolne (punkty przyłożenia, punkty zaczepienia, punkty celowania),
- stanowiska instrumentów pomiarowych (związane z konstrukcją i/lub założone poza nią),
Geodeta przystępując do pomiaru przemieszczeń lub odkształceń, ma do dyspozycji różne techniki prowadzenia monitoringu.
Można wyróżnić następujące techniki pomiarowe:
a) wyznaczenie przemieszczeń pionowych:
- metody niwelacji (technicznej, trygonometrycznej i precyzyjnej),
- metoda przestrzennego wcięcia w przód,
b) pomiar wychyleń od pionu elementów konstrukcyjnych:
- metoda stałej prostej, gdzie płaszczyznami odniesienia mogą być:
- pionowa płaszczyzna optyczna instrumentów geodezyjnych,
- pionowa płaszczyzna laserowa w postaci wiązki światła laserowego,
- napięty drut lub struna,
- płaszczyzna realizowana przez inklinometr lub wahadła,
- metoda przestrzennego wcięcia w przód,
c) pomiary rys obejmujące pomiar rozwarcia, głębokości, długości, położenia i przebiegu
d) wyznaczenie kształtu krawędzi budynku;
- metoda „śledzenia krawędzi",
- metoda przestrzennego wcięcia w przód,
e) kontrola zmian nachylenia fundamentów budynków za pomocą:
- sensorów,
- pochyłomierzy,
W praktyce najczęściej wyznacza się przemieszczenia pionowe.
Obiekty budowlane posadowione na tzw. gruntach słabych lub niejednorodnych bardzo często podlegają procesom przemieszczeń pionowych, które uwidoczniają się na elementach konstrukcyjnych zespołach konstrukcyjnych w formie różnego rodzaju spękań i zarysowań. Problem zabezpieczenia istniejących budynków podczas wykonywania obok nich wykopów, zwłaszcza głębokich, pod nowe obiekty jest nie tylko wciąż aktualny, ale wzbogaca się w nowe rozwiązania i poszerza swój zakres. Ewentualne uszkodzenia istniejących budynków są wynikiem nierównomiernych przemieszczeń terenu występujących w sąsiedztwie wykopu oraz zmiany parametrów geotechnicznych podłoża gruntowego. W praktyce geodeta bardzo
rzadko uczestniczy w planowym monitoringu przemieszczeń, najczęściej jest wzywany parametrów sytuacjach awaryjnych, gdy następują zarysowania budynków położonych w bezpośrednim sąsiedztwie budynku nowo wznoszonego. Powoduje to potrzebę wyznaczania i rejestrowania wielkości tych przemieszczeń, które mogą być wyznaczane na podstawie wyników pomiarów geodezyjnych wykonanych metodą niwelacji geometrycznej o wysokiej dokładności, tj. metodą niwelacji precyzyjnej.
Przemieszczenia poziome:
Metoda stałej prostej- wyznaczanie prostoliniowości oraz wychylenia od pionu budowli inżynierskich (wykorzystanie płaszczyzny pionowej przechodzącej przez stanowiska: instrumentu i tarczy celowniczej), przykładanie łaty poziomo i prostopadle do wybranych miejsc na budynku
Metoda bezpośredniego rzutowania- wyznaczanie odchyłek np. krawędzi budynku => nałożenie łat w poziomie posadowienia, rzutowanie na łatę pomierzonych punktów
Metoda trygonometryczna - stosujemy do wyznaczania np. prostoliniowości obiektów wysmukłych - nachylenia, gdy nie możemy zastosować metody bezpośredniego rzutowania
Metoda przestrzennego wcięcia w przód - połączenie kątowego wcięcia w przód na płaszczyźnie z trygonometrycznym wyznaczeniem wysokości punktu wcinanego
Skanery laserowe
Pomiary satelitarne GPS np. zamontowana na stałe antena satelitarna, sygnał przetwarzany w stacji odbiorczej dostarcza informacji o zachowaniu obiektu
Metoda poligonizacji precyzyjnej np. bada się zapory łukowe i prostoliniowe, absolutną stabilność punktów dowiązania ciągu.
Przemieszczenia pionowe:
Metoda niwelacji precyzyjnej - niwelacja geometryczna wysokiej dokładności, stosuje się niwelatory cyfrowe i automatyczne oraz łaty inwarowi e systematycznie komparowane, które zapewniają dokładności podwójnego pomiaru odcinka ciągu niwelacyjnego o długości 1 km z odchyleniem standardowym |0,2| ≤бΔH≤|0,7| mm/km
Sieć niwelacyjna może mieć charakter powierzchniowy (badanie ruchów gruntu) lub kilka ciągów w przybliżeniu równoległe (bądź o cechach wspólnych dla obu sieci)
Pomiar przemieszczeń (odkształceń) polega na cyklicznym powtarzaniu pomiarów, więc należy utrzymać sieć pomiarową składającą się z:
- punktów kontrolnych (obserwowanych) - stabilizację punktów pomiarowych na badanym obiekcie, należy poprzedzić analizę obiektu w porozumieniu ze specjalistą z zakresu mechaniki konstrukcji
Stabilizacja i dobór punktów do techniki pomiarowej przewidzianej do zastosowania.
Odpowiedni dobór punktów pozwoli poprawnie interpretować zachowanie konstrukcji.
- punktów odniesienia:
analiza otoczenia pod względem rozmieszczenia punktów odniesienia
rozpoznanie geotechniczne miejsc osadzenia punktów
stabilizacja
Baza odniesienia - odpowiednio bierzemy zbiór punktów materialnych spełniających określone kryterium stałości wzajemnego położenia, względem których mogą być wyznaczone przemieszczenia innych punktów
GGk 31 BADANIE PIONOWOŚCI BUDOWLI WYSMUKŁYCH
Budowle wysmukłe - są to budowle, których wysokość kilkakrotnie przekracza maksymalną szerokość budowli (np. kominy przemysłowe, wieże, maszty TV, latarnie morskie itp.)
Pomiar pionowości budowli wysmukłych ma na celu wykrycia odchylenia od pionowego i prostoliniowego przebiegu osi budowli. W badaniach tych stosuje się kilka metod:
Metoda bezpośredniego rzutowania
Metoda wcięć
Metoda projekcji laserowej
Metoda trygonometryczna (małych kątów)
Fotogrametryczna
Metoda bezpośredniego rzutowania:
Polega na wybraniu trzech stanowisk, najlepiej tak aby kierunki celoania przecinały się pod kątem 120o. Wartość i kierunek wychylenia osi uzyskuje się przez rzutowanie teodolitem tworzących trzonu na łatę umieszczoną poziomo między stanowiskami instrumentu a obiektem. W ten sposób składową odchylenia punktów osi budowli od pionu otrzymuje się bezpośrednio na łacie w skali d/D, gdzie d - odległość instrumentu od łaty, D - odległość instrumentu od obiektu.
Metoda wcięć kątowych:
Stosuje się w przypadku braku punktów charakterystycznych na budowli, ułatwiających jednoznaczne celowanie. Polega ona na wyznaczeniu trzech współrzędnych X, Y, Z kolejnych punktów osi budowli i porównaniu ich ze współrzędnymi punktu u podstawy obiektu. Pomiary wykonuje się w sposób jak w przypadku metody trygonometrycznej, z tym wyjątkiem , ze osnowa musi być zaniwelowana, a pomiar poszerzony jest o wyznaczenie kata pionowego.
Metoda projekcji laserowej:
Polega na wyznaczaniu składowych wychylenia z trzech stanowisk rozmieszczonych po jednej stronie obiektu i zastosowaniu na stanowisku środkowym teodolitu laserowego, który jest jednocześnie instrumentem mierzącym i wskazującym poziom obserwacji pozostałym instrumentom.
Metoda trygonometryczna:
Pomiary wykonuje się z trzech stanowisk obserwacyjnych usytuowanych symetrycznie wokół budowli. Odległości stanowisk od budowli nie mogą być mniejsze od 1,5 wysokości budowli. Polega na wyznaczeniu różnic kątowych między najniższym poziomem a poszczególnymi poziomami komina. Wyniki można opracować przy pomocy dwóch metod:
analityczno-graficzna: wykreślenie wstęg wahań, geometryzny środek trójkąta błędów określa położenie osi komina na rozpatrywanym poziomie,
analityczna: ułożenie równań poprawek i wyrównanie metodą najmniejszych kwadratów.
metoda fotogrametryczna
WYSOKOŚCIOWE OPRACOWANIE ODCINKA TRASY DROGOWEJ.
niweleta musi przechodzić przez założoną wysokość punktu początkowego i końcowego trasy oraz przez podane wysokości obowiązkowych punktów pośrednich,
spadki niwelety nie mogą przekraczać spadków maksymalnych, ustalonych przez odpowiednie instrukcje dla danego rodzaju trasy,
roboty ziemne, wynikające z ustalenia danej niwelety, powinny być jak najmniejsze,
objętości nasypów i wykopów winny być zrównoważone.
pomiary dynamiczne (obserwacje ruchu ciała w polu siły ciężkości):
Pomiary wahadłowe - wykorzystujące obserwacje zależności okresu swobodnego ruchu wahadła od przyspieszenia siły ciężkości w miejscu pomiaru. W aparacie notuje się interwał czasu między kolejnymi przejściami przez położenie równowagi lub od jednego skrajnego położenia do drugiego.
Pomiary balistyczne - wykorzystujące realizację równania drogi przebytej w polu siły ciężkości ruchem jednostajnie przyspieszonym (spadek próbnika) lub/i jednostajnie opóźnionym (podrzut i spadek próbnika w próżni).
Obserwacje częstotliwości drgań własnych obciążonej metalowej struny, związanej funkcyjnie z wartością przyspieszenia siły ciężkości.
pomiary statyczne (obserwacje stanu równowagi masy czujnika grawitacyjnego, na którą działa zarówno siła ciężkości, jak i siła ją kompensująca, wzorcowa, dokładnie określana mechanicznie lub elektronicznie).
Metoda stałej prostej
Metoda trygonometryczna
Metoda przestrzennego wcięcia w przód - połączenie kątowego wcięcia w przód na płaszczyźnie z trygonometrycznym wyznaczeniem wysokości punktu wcinanego
Skanery laserowe
Pomiary satelitarne GPS np. zamontowana na stałe antena satelitarna, sygnał przetwarzany w stacji odbiorczej dostarcza informacji o zachowaniu obiektu
Metoda ta jest w istocie analogiczna do metody trygonometrycznej. Różnica polega na tym, że przyrządem do wykonywania obserwacji jest kamera fotogrametryczna, a nie teodolit.
Z trzech stanowisk wykonywane są zdjęcia tak, aby badany obiekt znajdował się na środku kliszy. Każde zdjęcie pozwala na wyznaczenie jednej składowej odchyleń pionu osi budowli na poszczególnych poziomach względem poziomu najniższego
Jeszcze opisać jak komin się obliczało
Wykonując opracowanie projektu trasy drogowej w płaszczyźnie pionowej należy dążyć do nadania przyszłej trasie prawidłowego ukształtowania pionowego, mającego bardzo duży wpływ na bezpieczeństwo ruchu przyszłych użytkowników. Geodezyjne opracowanie projektu trasy drogowej w płaszczyźnie pionowej sprowadza się do wykonania: profilu podłużnego terenu w miejscu lokalizacji przyszłej drogi, obliczeń związanych z projektem niwelety oraz wykonania przekrojów poprzecznych projektowanej trasy.
Opracowanie przekroju podłużnego trasy drogowej.
Przekrój podłużny wykonuje się na podstawie wyników niwelacji podłużnej trasy bądź na podstawie aktualnej mapy sytuacyjno-wysokościowej. Przekrój podłużny wykonuje się w odpowiednio dobranych skalach poziomej i pionowej, w zależności od rodzaju i ukształtowania terenu. Na przekrój podłużny wkreśla się niweletę trasy, czyli linię spadków osi trasy i łuków pionowych wyokrąglających załomy tych spadków, będącą obrazem projektowanej osi drogi w płaszczyźnie pionowej.
Projektowanie niwelety.
Nowo projektowana niweleta składa się z reguły, z kilku odcinków o różnych spadkach odpowiednio dostosowanych do ukształtowania terenu w danym miejscu i założonych wymagań projektowych. Prawidłowo zaprojektowana niweleta, wyrównująca załamania terenu, powinna odpowiadać szeregu szczegółowym warunkom które podane są w obowiązujących normach projektowych dla danej klasy drogi.
Najistotniejsze to:
Tak zaprojektowana niweleta będzie miała załomy, wynikające z zastosowania różnych spadków. Przy wystąpieniu znacznych różnic między spadkami dwóch kolejnych odcinków niwelety, ponad 1%, załamania te powinny być złagodzone poprzez zastosowanie wyokrąglających łuków pionowych. Jako łuki pionowe najczęściej stosowane są łuki kołowe lub symetryczne odcinki parabol.
Obliczenie łuku pionowego.
Łuki pionowe mogą być wklęsłe lub wypukłe, w zależności od kierunku zmiany spadków niwelety.
Łuki wypukłe muszą mieć duże promienie, aby kierowca miał zapewnioną widoczność wystarczającą do odpowiedniej reakcji na przeszkodę wyłaniająca się spoza wzniesienia. Na łukach wklęsłych widoczność jest zawsze zapewniona, lecz i tu promień musi być dostatecznie duży, aby zapewnić płynne pokonanie przez pojazd najniższego punktu na drodze, co ma znaczenie zarówno dla komfortu jazdy jak i bezpieczeństwa ruchu. Wielkości promieni łuków pionowych określone są w odpowiednich instrukcjach i dla dane klasy drogi wynoszą od kilku do kilkunastu tysięcy metrów.
Wytyczenie łuku pionowego, podobnie jaki i łuku poziomego, polega na wyznaczeniu w terenie punktów głównych i pośrednich łuku, zarówno sytuacyjnym jak i wysokościowym.
Aby wyznaczyć początek i koniec łuku pionowego, należy obliczyć długość stycznej t, którą należy odłożyć w obie strony od wierzchołka W. Jeżeli następujące po sobie pochylenia niwelety mają jednakowe znaki, to kąt zwrotu stycznych wynosi (α1-α2 )a jeżeli znaki pochyleń są różne, to kąt zwrotu stycznych wynosi (α1+α2) Wartość stycznej t oblicza się z wzoru:
![]()
lub przybliżonej zależności: ![]()
gdzie: i1 = tg α1 i2 = tg α2
Znając wielkość stycznej t można obliczyć kilometraż punktu P i punktu K przez co zostanie wyznaczone sytuacyjne położenie punktów głównych łuku kołowego ( kilometraż punktu S można przyjąć za jednakowy z kilometrażem wierzchołka W).
Wyznaczenie rzędnych punktów głównych P i K, przy znajomości wartości spadków i1 i i2 oraz stycznej t jest realizowane z wzorów podstawowych. Rzędną punktu S określa się od wierzchołka W po obliczeniu wielkości WS na podstawie wzoru przybliżonego:
![]()
.
Obliczenie punktów pośrednich sprowadza się do wyznaczenia rzędnych punktów na stycznych w ustalonym interwale kilometrażu, a następnie odjęciu lub dodaniu - w zależności od rodzaju łuku, wielkości y obliczonej z wzoru:
![]()
.
Obliczone rzędne punktów głównych i pośrednich zostają wpisane na przekrój podłużny trasy stanowiąc dane realizacyjne do wyznaczenia łuku pionowego wyokrąglającego załom niwelety.
Opracowanie przekrojów poprzecznych.
Na podstawie wykonanego przekroju podłużnego trasy oraz parametrów technicznych drogi założonych w projekcie, wykonuje się przekroje poprzeczne trasy.
Przekroje poprzeczne wykonuje się zazwyczaj w jednej skali, najczęściej 1:100, podając podstawowe dane dotyczące drogi, takie jak: rzędne niwelety i terenu,
szerokość jezdni, korony drogi i pasa drogowego, głębokości rowów, pochylenia poprzeczne jezdni, pochylenia skarp i inne. Przekroje poprzeczne wykonuje się we wszystkich charakterystycznych miejscach trasy, takich jak: punkty styczności prostych i odcinków krzywoliniowych, punkty załamań niwelety, punkty hektometrowe, punkty zmiany szerokości korony drogi, na skrzyżowaniach z innymi drogami i kolejami, w rejonie wiaduktów i mostów itp.
Przekroje poprzeczne stanowią podstawę do wykonania obliczenia objętości robót ziemnych, a w czasie budowy drogi do prawidłowego ukształtowania jej nawierzchni.
W celu szybkiego odprowadzenia wody opadowej przekrój poprzeczny jezdni na prostej na pochylenie dwustronne, na zewnątrz drogi. Na łuku jezdnia powinna być pochylona jednostronnie do środka łuku, aby przeciwdziałać sile odśrodkowej. Odcinek drogi na którym dokonuje się przejścia od pochylenia dwuspadowego na prostej do jednospadowego na łuku kołowym nazywa się rampą drogową.
Rampę drogową stosuje się zazwyczaj na długości krzywej przejściowej stopniowo podwyższając rzędną zewnętrznej krawędzi jezdni, aż do uzyskania jednospadowego pochylenia na początku łuku. Na trasach gdzie nie stosuje się krzywej przejściowej, rampa drogowa projektowana jest na odcinku prostej poprzedzającym łuk kołowy.
Prawidłowo zaprojektowana rampa drogowa daje możliwość prawidłowego ułożenia nawierzchni drogi, co ma bardzo istotne znaczenie dla bezpieczeństwa ruch drogowego na krzywoliniowym odcinku trasy
GGk 34 Współczesne metody pomiarów grawimetrycznych w geodezji.
Podstawowym zadaniem grawimetrii geodezyjnej jest określenie charakterystyk pola siły ciężkości Ziemi i innych ciał niebieskich, jako funkcji miejsca i momentu obserwacji.
Jest to możliwe poprzez pomiary natężenia tego pola gobserw i jego gradientów, wykonane na powierzchni bryły naszego globu lub w jego sąsiedztwie.
W pomiarach wartości siły ciążenia, czyli wartości sumy wektorów grawitacji i siły odśrodkowej, wykorzystuje się wiele zjawisk, takich jak: swobodny spadek ciała w polu siły ciężkości, podrzut i spadek ciała (balistykę), ruch wahadła fizycznego, precesję giroskopu, drgania obciążonej struny, lewitację nadprzewodnika w polu magnetycznym, zakrzywienie powierzchni wirującej cieczy, deformację ciał sprężystych pod działaniem stałej masy, ruch przewodnika lub naładowanych elektrycznie cząsteczek w polu magnesu stałego czy wznoszenie się cieczy w kapilarze.
Obecnie - przy współczesnym, szybkim rozwoju techniki i wysokich wymaganiach co do dokładności pomiaru natężenia siły ciężkości - stosuje się obserwacje tylko niektórych z wymienionych zjawisk fizycznych.
Ze względu na sposób pomiaru i konstrukcję elementu czujnikowego grawimetru dzieli się metody pomiarów przyspieszenia siły ciężkości na dwie grupy:
Metody statyczne pomiarów grawimetrycznych polegają na doprowadzaniu masy próbnej M umieszczonej w systemie pomiarowym do stanu równowagi za pomocą wzorcowanej siły kompensującej F. Równanie równowagi spełnione w tym momencie w grawimetrze statycznym przez jego system ma postać znaną z mechaniki:
GGk 35 Metody wyznaczania przemieszczeń poziomych
Przemieszczeniem elementu konstrukcyjnego lub obiektu jest zmiana położenia obiektu względem otoczenia (układu odniesienia) w określonym przedziale czasu polegająca na przesunięciu albo obrocie lub przesunięciu i obrocie, przy której wzajemne odległości wszystkich punktów obiektu nie ulegają zmianie.
przemieszczenia poziome:
42
B, L - elipsoida GRS' 80 (WGS '84)
B, L - elipsoida Krasowskiego
Wyszukiwarka
Podobne podstrony:
Odp zagadnienia na obrone, do druku specjalnosciowe-sciaga, 2981550897242 kod do zmywacza
Zagadnienia na egzamin ze współczesnych kierunków pedagogicznych
Zagadnienia na zaliczenie do Jainskiego
zagadnienia na obronę(2), studia magisterka, studia magisterka semestr IV
7 PODCZERWIEŃ, Inżynierka, zagadnienia na obronę, download(1)
Zagadnienia na Obronę Licencjatu – Zagadnienia z Specjalności pedagogika opiekuńczo wychowawcza z
Zagadnienia na Obronę Magisterską Zagadnienia z metodologii?dań pedagogicznych
Zagadnienia na egzamin z matematyki dla kierunku Budownictwo, STUDIA, Budownictwo UZ, Semestr I, Mat
ŁASZCZ - 30 zagadnień na obronę, Administracja
zagadnienia II, zagadnienia na obronę
Zagadnienia na obronę
Zagadnienia na Obronę Magisterską – Zagadnienia Ogólne
Zagadnienia na obrone prac dyplomowych (2)
4.1 OPTYKA LASER, Inżynierka, zagadnienia na obronę, download(1)
więcej podobnych podstron