Politechnika Lubelska |
Laboratorium Automatyki i Sterowania |
||||
w Lublinie |
Ćwiczenie Nr 2 |
||||
Nazwisko: Ligaj Latawiec Drzymała Janek |
Imię: Mirosław Andrzej Piotr Krzysztof |
Semestr
VI |
Grupa
ED. 6.2 |
Rok akad.
1996/97 |
|
Temat ćwiczenia: Identyfikacja obiektów sterowania |
Data wykonania 28.04.1997 |
Ocena
|
|||
Cel ćwiczenia :
Celem ćwiczenia jest identyfikacja własności statycznych i dynamicznych obiektów sterowania tzn. wyznaczenie modeli matematycznych obiektów. Identyfikacja będzie przeprowadzona przy pomocy eksperymentu czynnego metodą charakterystyk czasowych oraz metodą charakterystyk częstotliwościowych
1. Identyfikacja na podstawie charakterystyk czasowych .
a. Odpowiedź układu o transmitancji G1(s) na wymuszenie skoku jednostkowego .
5ms/1 cm 1 cm= 0.5 V
5 cm
8,2 cm
Na podstawie odpowiedzi skokowej możemy stwierdzić, że układ pierwszy ma charakter członu różniczkującego o następującej transmitancji i stałej czasowej
G (s) = k / ( 1 + sT ) T=1ms k=1.25
b. Odpowiedź układu o transmitancji G2(s) na wymuszenie skoku jednostkowego.
1. 0,2 V = 1 cm 2 ms / 1 cm
Odpowiedź członu na skok jednostkowy wskazuje na jego oscylacyjny charakter. Obiekt oscylacyjny drugiego rzędu ma transmitancję:
G ( s ) = 1 / [ s2T2 + 2ξTs + 1]
c. Odpowiedź układu o transmitancji G3(s) na wymuszenie skoku jednostkowego .
1 V =1 cm 5 ms /1 cm
Na podstawie odpowiedzi obiektu na wymuszenie w postaci skoku jednostkowego stwierdzamy, że ma on postać układu inercyjnego pierwszego rzędu o transmitancji :
G ( s ) = k / [1 + sT ] T=1ms k=1.25
2. Identyfikacja własności dynamicznych obiektów metodą charakterystyk częstotliwościowych
a). Obiekt o transmitancji G1(s)
Uwe = 10 V
|
||
f |
φ |
Uwy |
Hz |
0 |
V |
5 |
95 |
0.28 |
10 |
89 |
0.6 |
30 |
80 |
1.77 |
50 |
73 |
2.97 |
700 |
66 |
4 |
100 |
57 |
5.11 |
150 |
46 |
6.7 |
200 |
37 |
7.6 |
250 |
32 |
8.2 |
300 |
27 |
8.7 |
400 |
18 |
9.1 |
500 |
17 |
9.3 |
700 |
12 |
9.6 |
800 |
11 |
9.7 |
1000 |
9 |
9.44 |
2000 |
4 |
10.04 |
4000 |
2 |
9.8 |
8000 |
0.75 |
9.4 |
10000 |
0.5 |
10.1 |
Charakterystyki - amplitudowa i fazowa

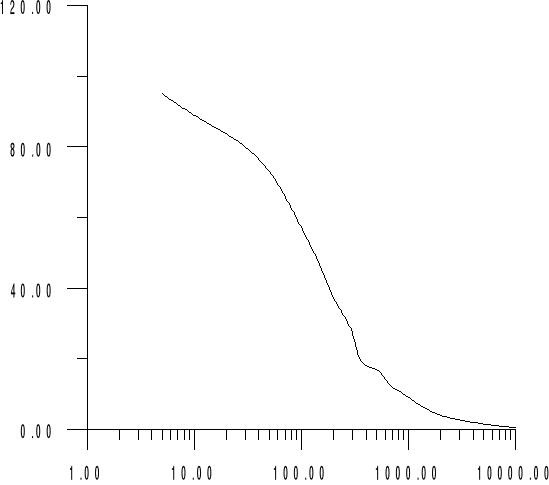
Na podstawie powyższych charakterystyk możemy oszacować stałe
k=1 (0dB) T=2.5 msb). Obiekt o transmitancji G2(s)
Uwe = 10 V
|
||
f |
ϕ |
Uwy |
Hz |
0 |
V |
10 |
-1 |
9.5 |
20 |
-1.75 |
9.2 |
40 |
-4 |
9.8 |
80 |
-7.5 |
9.8 |
100 |
-9 |
9.9 |
120 |
-11.5 |
9.9 |
140 |
-14 |
10.1 |
160 |
-16.25 |
10.5 |
180 |
-18.5 |
10.6 |
200 |
-22 |
10.9 |
300 |
-41 |
12.6 |
400 |
-86 |
11.6 |
500 |
-96 |
10.2 |
550 |
-108 |
8.6 |
600 |
-116 |
7.1 |
650 |
-122 |
6 |
700 |
-127 |
5.2 |
800 |
-128 |
5.04 |
1000 |
-141 |
2.4 |
2000 |
-152 |
0.66 |
4000 |
-154 |
0.125 |
Na podstawie przedstawionych poniżej charakterystyk możemy określić stałe
k=1 (0dB)
fn=500 Hz z czego wynika
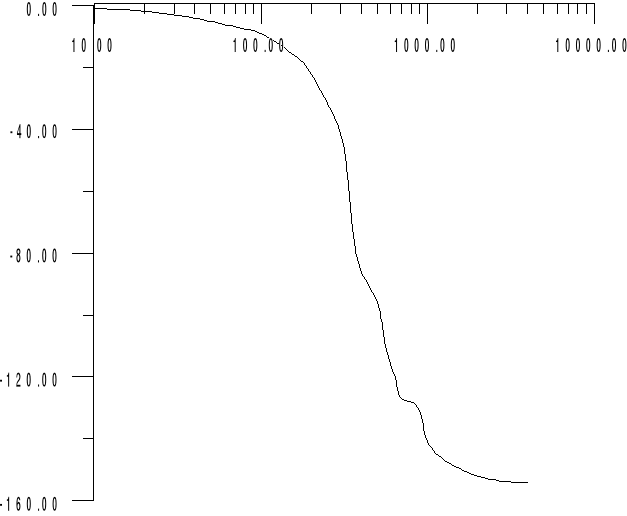
Tn=1/fn=2 ms
Charakterystyki - amplitudowa i fazowa
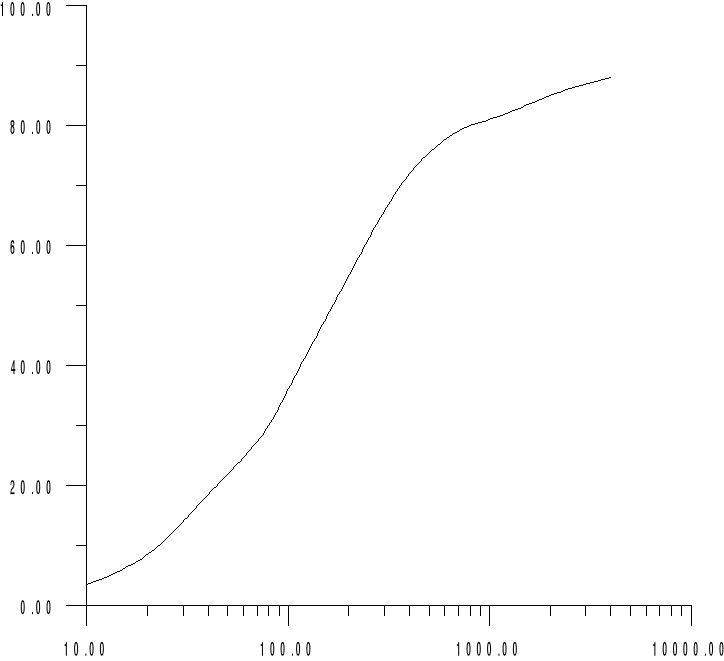
c). Obiekt o transmitancji G3(s)
Uwe = 10 V
|
||
f |
ϕ |
Uwy |
Hz |
0 |
V |
10 |
3.5 |
9 |
20 |
8.5 |
9.2 |
40 |
18.5 |
9.5 |
80 |
30 |
8.2 |
100 |
36 |
7.3 |
200 |
55 |
5 |
400 |
72 |
2.7 |
800 |
80 |
1.2 |
1000 |
81 |
1.1 |
2000 |
85 |
0.59 |
4000 |
88 |
0.3 |
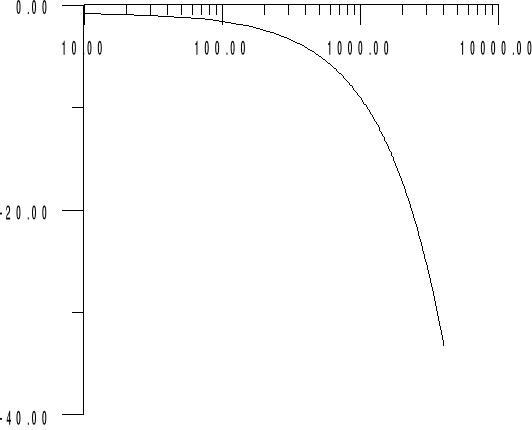
Stałe wyznaczone przez nas na podstawie poniższych charakterystyk dla członu inercyjnego pierwszego rzędu wynoszą
k=1 (0dB) f1=140 Hz z czego wynika
T1=1/f1=7.1ms
Charakterystyki - amplitudowa i fazowa
Wnioski :
Celem powyższego ćwiczenia było zapoznanie nas z metodami identyfikacji obiektów sterowania. Dokonaliśmy w nim identyfikacji właściwości dynamicznych metodami charakterystyk czasowych oraz charakterystyk częstotliwościowych. Rozpoznanie układu i w następstwie tego opisanie go przy pomocy odpowiedniej transmitancji operatorowej nie nastręczało nam kłopotu. Pewne problemy pojawiły się przy wyznaczaniu stałych występujących w transmitancjach opisujących układy (czasowych T oraz wzmocnienia k). Ze względu na zbyt małą dokładność nie byliśmy w stanie określić stałych dla układu oscylacyjnego podczas badania go metodą charakterystyk czasowych. Dla pozostałych obiektów wartości odnośnie stałej k są zbliżone przy porównaniu obydwu metod, natomiast stałe czasowe różnią się dość znacznie. Wpływ na to miała z pewnością ograniczona dokładność pomiarów oraz - w największym stopniu - ograniczona dokładność dokonywanych przez nas aproksymacji np. przy rysowaniu stycznych. Rozpoznanymi przez nas obiektami są kolejno :
G1(s) |
Człon różniczkujący |
G2(s) |
Człon oscylacyjny |
G3(s) |
Człon inercyjny pierwszego rzędu |
Wyszukiwarka
Podobne podstrony:
1 Identyfikacja obiektow sterow Nieznany (2)
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Labolatorium komputerowych systemów automatyki, Systemy wizualizacji i sterowania, Politechnika Lube
Identyfikacja obiektów sterowania v2pop, Wydzia? Elektryczny
Identyfikacja obiektów sterowania 9, Wydzia? Elektryczny
Identyfikacja 11 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Teoria sterowania 9, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
Ściąga-Teoria sterowania, Politechnika Lubelska, Studia, Studia, sem VI, z ksero na wydziale elektry
Laboratorium energoelektroniki, Trójfazowe prostowniki sterowane, Politechnika Lubelska
Identyf obiektow sterowania mojeeeeeee
Identyfikacja obiektu sterowania
tr cw 3 identyfikacja obiektu sterowania
Identyf obiektow sterowania mojeeeeeee
1 Identyfikacja obiektow sterow Nieznany (2)
Ident obiekt h(t), Politechnika Lubelska, Studia, Semestr 6, Egzaminy, automatyka, AUTOMATYKA
Identyfikacja 6-9 protokół, Politechnika Lubelska, Studia, semestr 5, Sem V, Nowy folder
więcej podobnych podstron