Podstawy konstrukcji maszyn.
Projekt robota
Wykonał:
Marcin Olszówka
AiR
Semestr V
Grupa 2
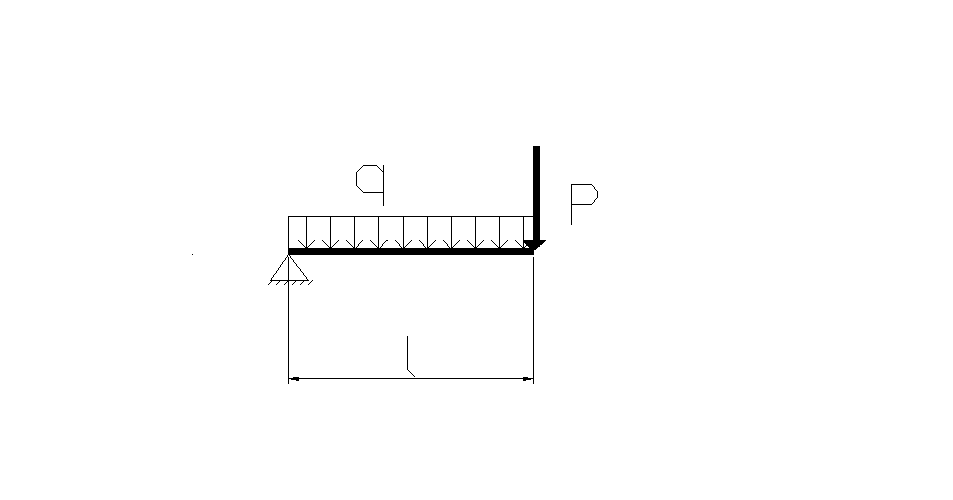
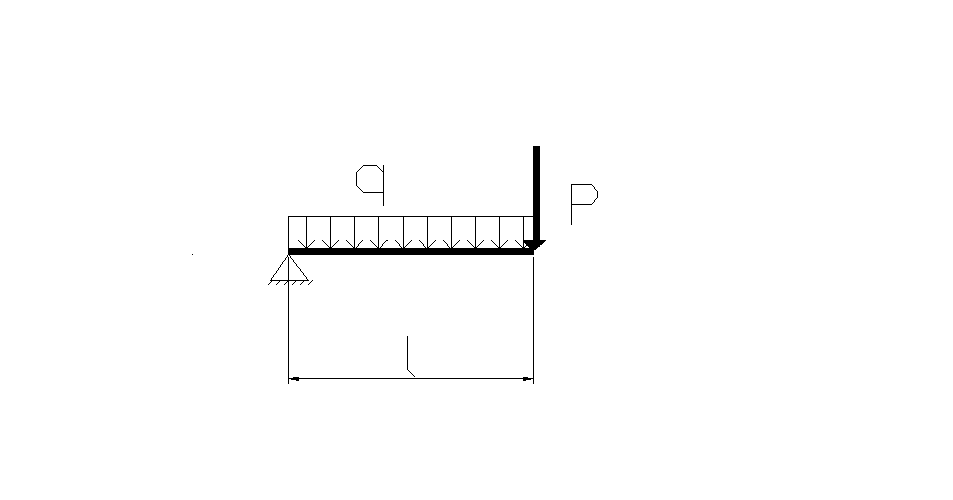
1.Strzałka ugięcia
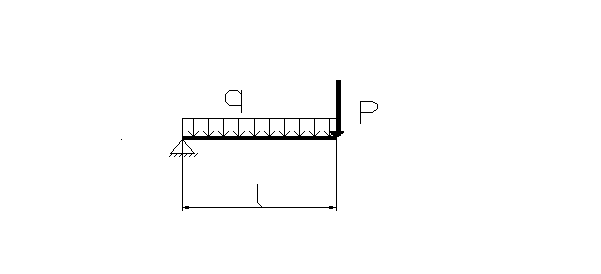
1.1 Strzałka ugięcia ramienia A.
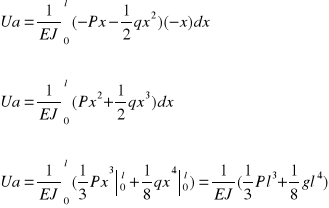
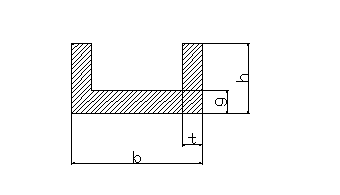
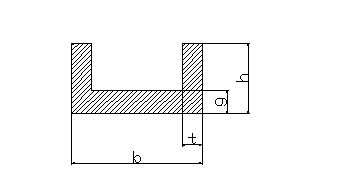
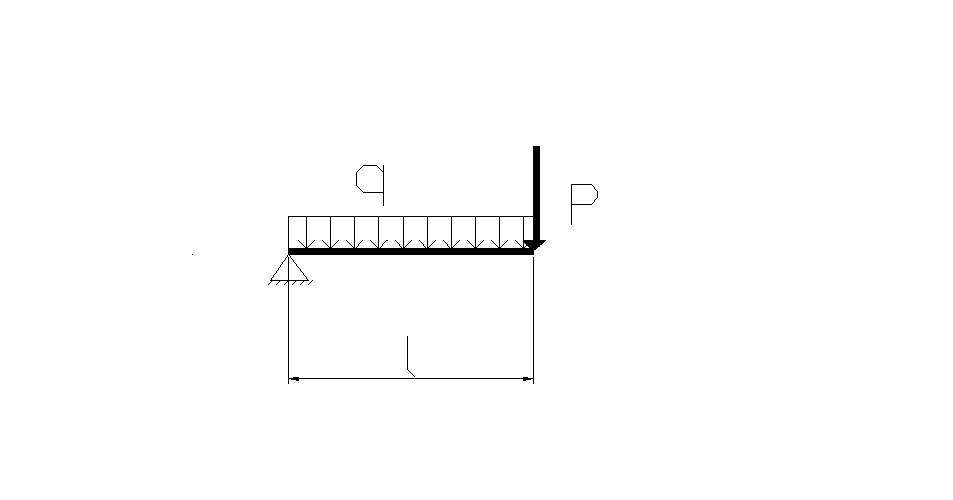
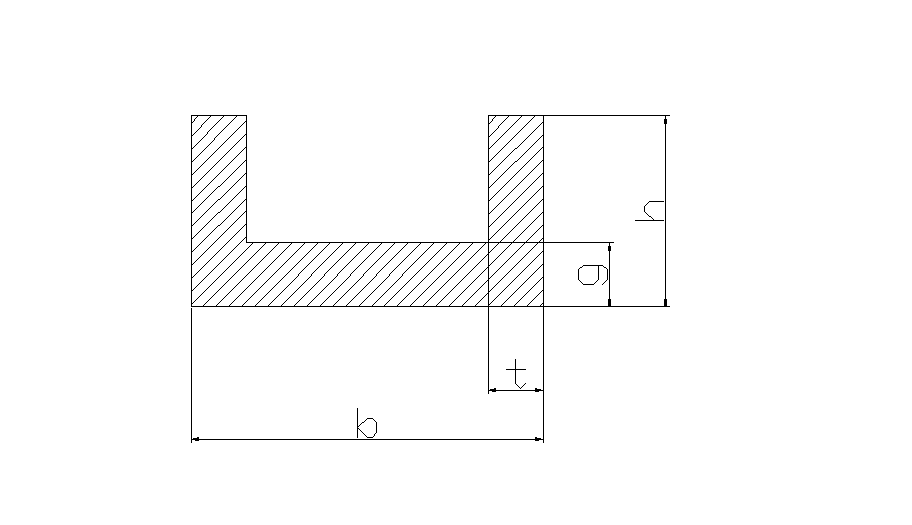
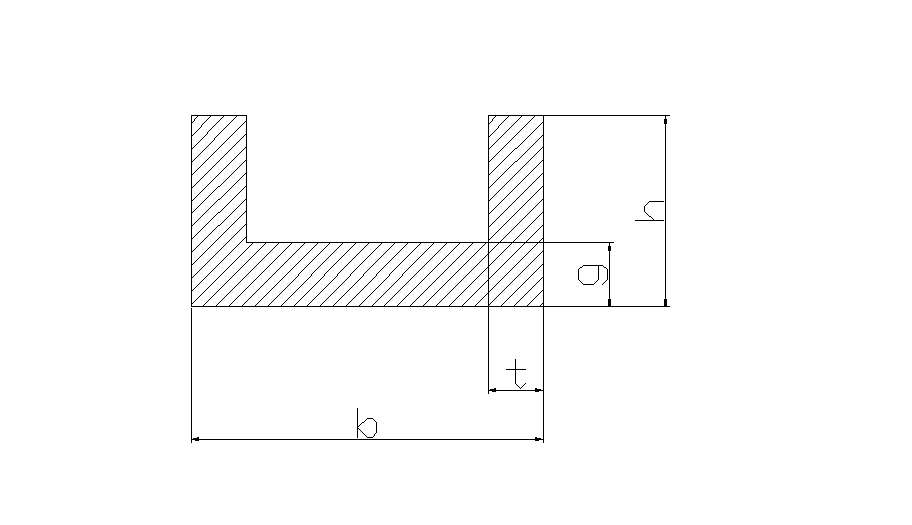
Następnie obliczamy moment bezwładności dla danego przekroju:
Dane:
b=8 [cm]
h=4.5 [cm]
g=0.6 [cm]
t=0.8 [cm]
pole przekroju ceownika s= 11 [cm2]
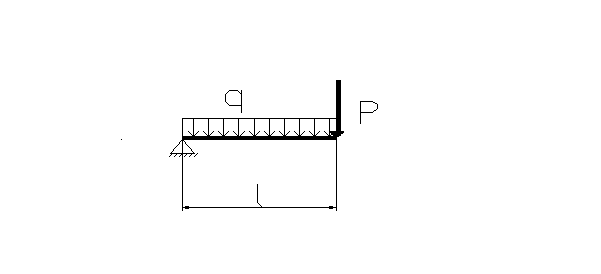
l - długość ramienia dla którego wyznaczamy strzałkę ugięcia
l=20 [cm]
E=2.06*1011[Mpa]
ρ=7.5;8.5 [g/cm3]
g=10 [m/s2]
P=130 [N]
Obliczenia:
![]()
yxc=1.57 [cm]
![]()
Jxo1=243 [cm4]
![]()
![]()
Jxo2=126.54 [cm4]
Jxo= Jxo1- Jxo2 =243 - 126.54 =116.46 [cm4]
Moment bezwładności:
Jxc = Jxo - s*(yxc)2
Jxc = 89.24 [cm4]
Jxc = 0.0000008924 [m4]
Objętość ceownika:
V =s*l
V =0.00022 [m3]
V =220 [cm3]
Masa:
m = V*ρ
m =220*7.5=1650 [g]
m =1.65 [kg]
Masa całkowita:
mcA = 1.65 [kg]
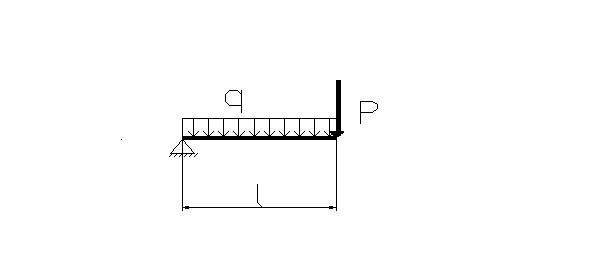
Obciążenie ciągłe:
q = m*g/l
q = 82.5 [N/m]
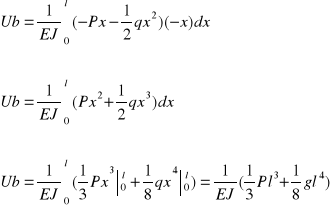
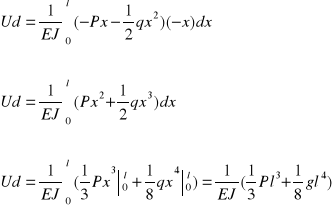
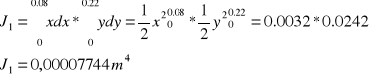
Strzałka ugięcia:
UA = (1 / 206000000000 * 0.0000008924) * (0.33 * 130 * (0.2)3 + 0.125 * 82.5*(0.2)4)
UA = 0.000001957 [m]
UA = 0.002mm]
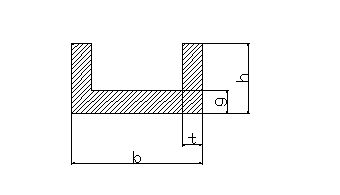
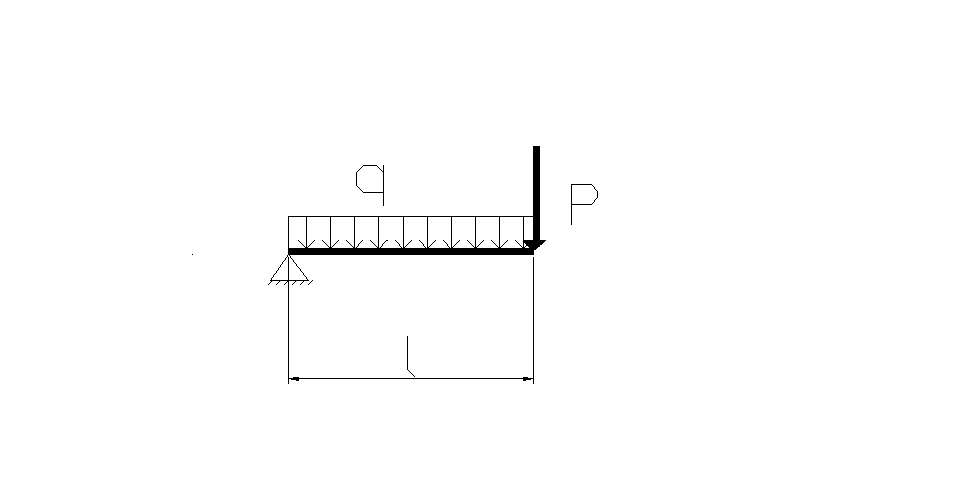
1.2 Strzałka ugięcia ramienia B.
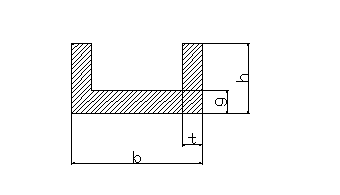
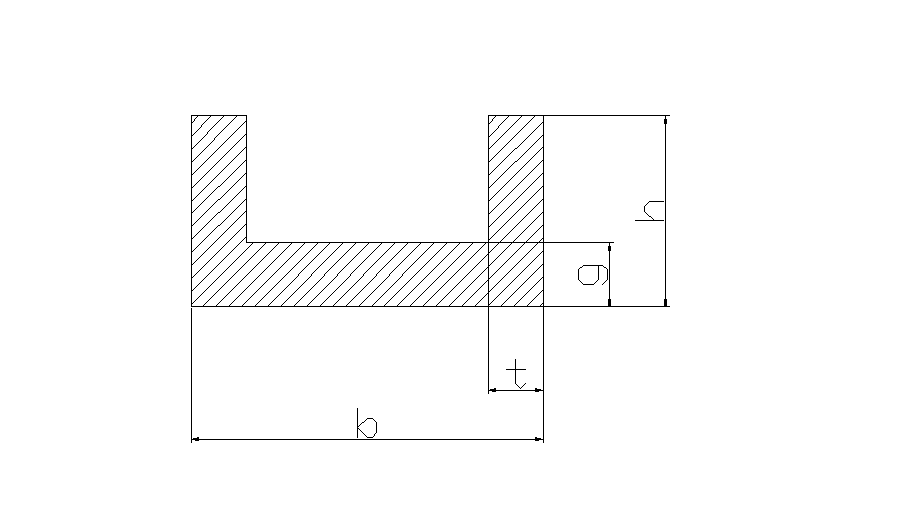
Następnie obliczamy moment bezwładności dla danego przekroju:
Dane:
b=12 [cm]
h=5.5 [cm]
g=0.7 [cm]
t=0.9 [cm]
pole przekroju ceownika s= 17.04 [cm2]
l - długość ramienia dla którego wyznaczamy strzałkę ugięcia
l=70 [cm]
E=2.06*1011[Mpa]
ρ=7.5;8.5 [g/cm3]
g=10 [m/s2]
Obliczenia:
![]()
yxc=1.744 [cm]
![]()
Jxo1=665.5 [cm4]
![]()
![]()
Jxo2=376 [cm4]
Jxo= Jxo1- Jxo2 =665.5 -376 =289.5 [cm4]
Moment bezwładności:
Jxc = Jxo - s*(yxc)2
Jxc = 237.67 [cm4]
Jxc = 0.000002376 [m4]
Objętość ceownika:
V =s*l
V =0.00119 [m3]
V =1192.8 [cm3]
Masa:
m = V*ρ
m =1192.8*7.5=8946[g]
m =8.95 [kg]
Masa napędów i przekładni :
mp = 6 [kg]
Masa całkowita:
mcB =m + mp = 14.95 [kg]
Obciążenie ciągłe:
q = m*g/l
q = 213 [N/m]
Strzałka ugięcia:
P = 130N + mcA * g
P = 146.5 [N]
U = (1 / 206000000000 *0.000002376) * (0.33 * 146.5 * (0.7)3 + 0.125 * 213*(0.7)4)
UB = 0.00004683 [m]
UB = 0.05 [mm]
1.3 Strzałka ugięcia ramienia C.
Następnie obliczamy moment bezwładności dla danego przekroju:
Dane:
b=16 [cm]
h=6.5 [cm]
g=0.75 [cm]
t=1.05 [cm]
pole przekroju ceownika s= 24 [cm2]
l - długość ramienia dla którego wyznaczamy strzałkę ugięcia
l=100 [cm]
E=2.06*1011[Mpa]
ρ=7.5;8.5 [g/cm3]
g=10 [m/s2]
Obliczenia:
![]()
yxc=2.005[cm]
![]()
Jxo1=1464,6 [cm4]
![]()
![]()
Jxo2=880,84 [cm4]
Jxo= Jxo1- Jxo2 = 1464,6 - 880,84 =583,82 [cm4]
Moment bezwładności:
Jxc = Jxo - s*(yxc)2
Jxc = 487,04 [cm4]
Jxc = 0.00000487 [m4]
Objętość ceownika:
V =s*l
V =0.002400 [m3]
V =2400 [cm3]
Masa:
m = V*ρ
m =2400*7.5=18000 [g]
m =18 [kg]
Masa napędów i przekładni :
mp = 15 [kg]
Masa całkowita:
mcc =m +mp = 33 [kg]
Obciążenie ciągłe:
q = m*g/l
q = 330 [N/m]
Strzałka ugięcia:
P=130N + mcA * g + mcB * g
P = 296 [N]
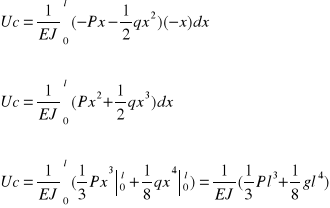
UC = (1 / 206000000000 *0.00000487) * (0.33 * 296 * (1)3 + 0.125 * 330*(1)4)
UC = 0.000138 [m]
UC = 0.14[mm]
1.4 Strzałka ugięcia ramienia D.
Następnie obliczamy moment bezwładności dla danego przekroju:
Dane:
b=22 [cm]
h=8 [cm]
g=0.9 [cm]
t=1.25 [cm]
pole przekroju ceownika s= 37,4 [cm2]
l - długość ramienia dla którego wyznaczamy strzałkę ugięcia
l=100 [cm]
E=2.06*1011[Mpa]
ρ=7.5;8.5 [g/cm3]
g=10 [m/s2]
Obliczenia:
![]()
yxc=2.55 [cm]
![]()
Jxo1=3754.6 [cm4]
![]()
![]()
Jxo2=2415.9 [cm4]
Jxo= Jxo1- Jxo2 =3754.6 - 2415.9 = 1338.6 [cm4]
Moment bezwładności:
Jxc = Jxo - s*(yxc)2
Jxc = 1095.4 [cm4]
Jxc = 0.000010954 [m4]
Objętość ceownika:
V =s*l
V =0.00374 [m3]
V =3740 [cm3]
Masa:
m = V*ρ
m =3740*7.5=28050 [g]
m =28.05 [kg]
Masa napędów i przekładni :
mp = 20 [kg]
Masa całkowita:
mcD =m + mp = 48.05 [kg]
Obciążenie ciągłe:
q = m*g/l
q = 480.5 [N/m]
Strzałka ugięcia:
P= 130N + mcA * g + mcB * g + mcc * g
P= 626 N
UD = (1 / 206000000000 *0.000010954) * (0.33 * 626 * (1)3 + 0.125 * 480.5*(1)4)
UD = 0.00012 [m]
UA = 0.12 [mm]
Całkowita strzałka ugięcia wynosi:
U = UA + UB + UC + UD = 0.002 + 0.05 + 0.14 + 0.12
U = 0.312 [mm]
2.Siły ciężkości.
Siły bezwładności.
Siły odśrodkowe.
2.1 Siły ciężkości.
Masa chwytaka.
mch![]()
=13 [ kg]
Masa ramienia pierwszego.
m1 =1.65 [ kg]
Masa przekładni 1.
mp1= 1.5 [kg]
Masa ramienia drugiego.
m2 = 8.95 [kg]
Masa silnika 1.
ms1= 4.5 [kg]
Masa przekładni 2.
mp2= 3 [kg]
Masa ramienia trzeciego.
m3 = 18 [kg]
Masa silnika 2.
ms2= 12 [kg]
Masa przekładni 3.
mp3= 3 [kg]
Masa ramienia czwartego.
m4 = 28.05 [kg]
Masa silnika 3.
ms3= 17 [kg]
g=9.81 [m/s2]
Gch = mch * g = 13*9.81=127.5 [N]
G1 = m1 * g = 1.65*9.81= 16.2 [N]
Gp1= mp1 * g = 1.5*9.81= 14.7 [N]
G2 = m2 * g = 8.95*9.81= 87.8 [N]
Gs1= ms1* g = 4.4*9.81= 44.1 [N]
Gp2= mp2 * g = 3*9.81= 29.4 [N]
G3 = m3 * g = 18*9.81=176.6 [N]
Gs2= ms2 * g= 12*9.81= 117.7 [N]
Gp1= mp1 * g = 3*9.81= 29.4 [N]
G4 = m4 * g = 28.05*9.81=275.2 [N]
Gs1= ms1 * g = 17*9.81=166 [N]
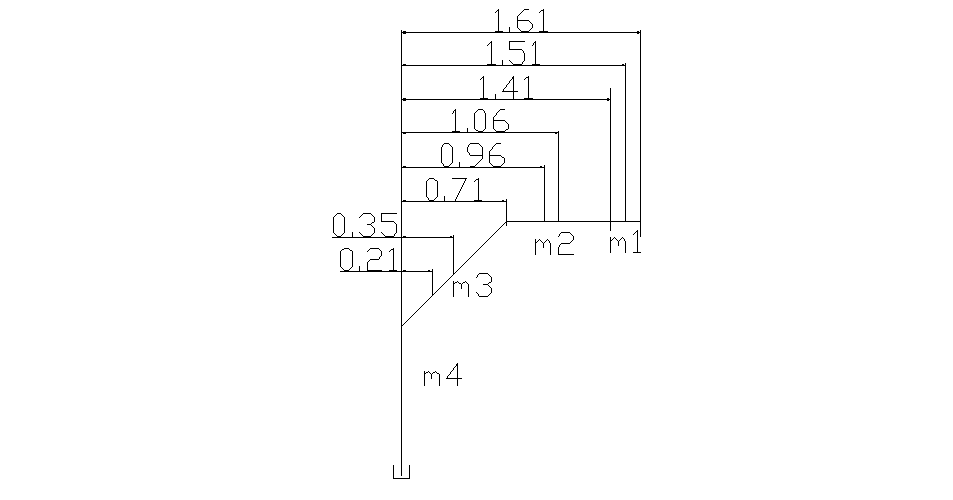
2.2 Siły bezwładności.
-dla ruchu obrotowego wokół osi.
Przyspieszenia.
ach = 2 [m/s2]
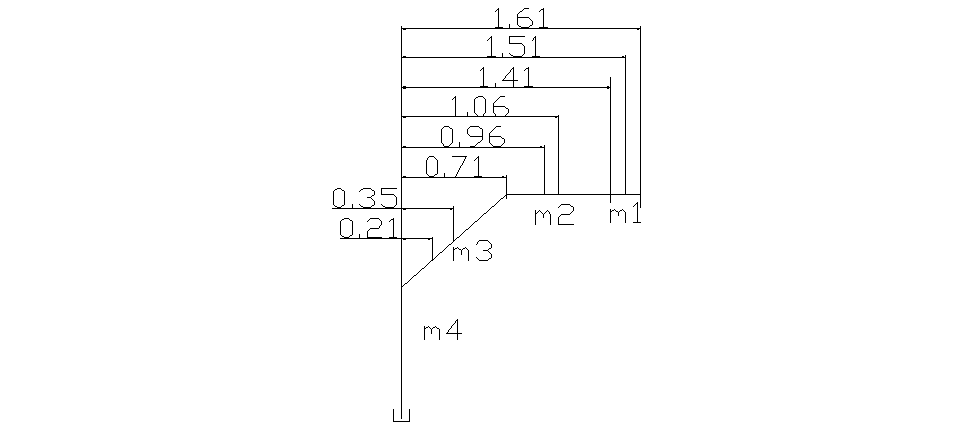
a1 = a1 *(1.51/1.61) = 1.87 [m/s2]
ap1 = a1 * (1.41/1.61) =1.75 [m/s2]
a2 = a1 *(1.06/1.61) =1.31 [m/s2]
as1 = a1 * (0.96/1.61) = 1.19[m/s2]
ap2 = a1 * (0.71/1.61) =0.88 [m/s2]
a3 = a1 * (0.35/1.61) = 0.43 [m/s2]
as2 = a1 * (0.21/1.61) = 0. 26 [m/s2]
Bch = ach*mch=2*13=26[N]
B1 = a1 * m1 = 1.87*1.65 =3.1 [N]
Bp1 = ap1 mp1 = 1.75*1.5 = 2.6 [N]
B2 = a2 * m2 = 1.31*8.95 = 11.8 [N]
Bs1 = as1 * ms1 = 1.19*4.5 = 5.3 [N]
Bp2 = ap2 * mp2 = 0.88*3 = 2.6 [N]
B3 = a3 * m3 = 0.43*18 = 7.7 [N]
Bs2 = as2 * ms2 = 0.26*12 = 3.2 [N]
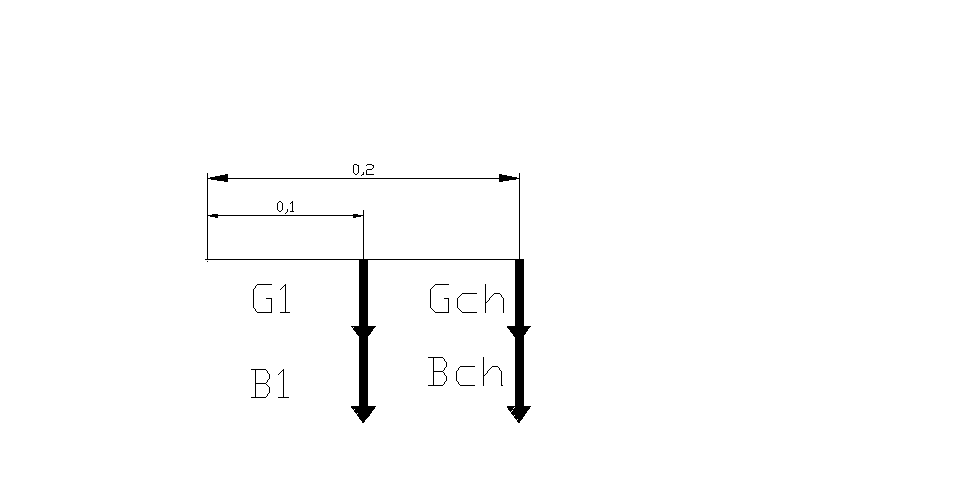
dla ruchu w płaszczyźnie pionowej
Przyspieszenie końcówki każdego kamienia a=0.1 [m/s2]
ach = 0.1 [m/s2]
a1 = a * (0.1/0.2) = 0.05[m/s2]
ap1 = a =0.1 [m/s2]
a2 = a *(0.35/0.7) =0.05 [m/s2]
as1 = a * (0.25/0.7) = 0.035 [m/s2]
ap2 = a =0.1 [m/s2]
a3 = a * (0.5/1) = 0.05 [m/s2]
as2 = a * (0.3/1) = 0. 03 [m/s2]
Bch = ach*mch=0.1*13=1.3[N]
B1 = a1 * m1 = 0.05*1.65 =0.08 [N]
Bp1 = ap1 mp1 = 0.1*1.5 = 0.15 [N]
B2 = a2 * m2 = 0.05*8.95 = 0.44 [N]
Bs1 = as1 * ms1 = 0.035*4.5 = 0.16 [N]
Bp2 = ap2 * mp2 = 0.1*3 = 0.3 [N]
B3 = a3 * m3 = 0.05*18 = 0.9[N]
Bs2 = as2 * ms2 = 0.03*12 = 0.36 [N]
2.3 Siły odśrodkowe.
Prędkości.
Czas obrotu t=3 [s].
Vch = ach*t = 6 [m/s]
V1 = a1*t = 1.87*3 = 5.61 [m/s]
Vp1 = ap1*t = 1.75*3 =5.25 [m/s]
V2 = a2*t =1.31*3 =3.93 [m/s]
Vs1 = as1*t = 1.19*3 = 3.57[m/s]
Vp2 = ap2*t = 0.88*3 = 2.64[m/s]
V3 = a3*t = 0.43*3 = 1.29 [m/s]
Vs2 = as2*t = 0. 26*3 =0.78 [m/s]
Och = mch* Vch^2/1.61= 290 [N]
O1 = m1* V1^2/1.51= 34 [N]
Op1 = mp1* Vp1^2/1.41= 27 [N]
O2 = m2* V2^2/1.06= 128 [N]
Os1 =ms1* Vs1^2/0.96= 40 [N]
Op2 = mp2* Vp2^2/0.71= 29 [N]
O3 =m3* V3^2/0.35= 85 [N]
Os2 =ms2* Vs2^2/0.21= 34 [N]
3.Momenty.
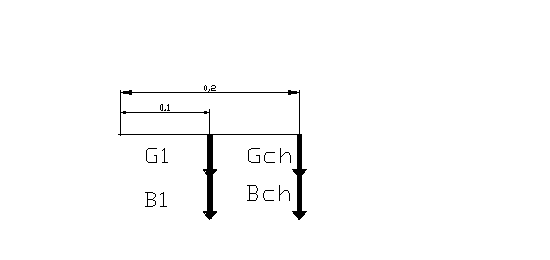
Ramię 1
Gch = 127.5 [N]
G1 = 16.2 [N]
Bch = 1.3[N]
B1 = 0.08 [N]
M1 = (Gch + Bch)*0.2 + (G1 + B1)*0.1
M1= 28 [Nm]
Ramię 2
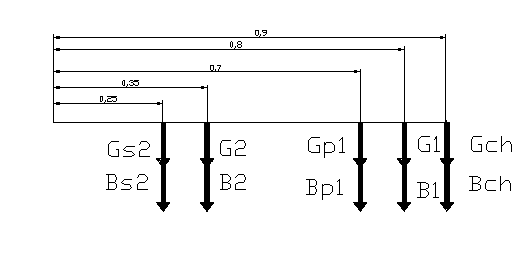
Gch = 127.5 [N]
G1 = 16.2 [N]
Gp1 = 14.7 [N]
G2 = 87.8 [N]
Gs1 = 44.1 [N]
Bch = 1.3[N]
B1 = 0.08 [N]
Bp1 = 0.15 [N]
B2 = 0.44 [N]
Bs1 = 0.16 [N]
M2 = (Gch + Bch)*0.9 + (G1 + B1)*0.8 + (Gp1+ Bp1)*0.7 + (G2 + B2)*0.35 + (Gs1 + Bs1)*0.25
M2 = 181 [Nm]
Ramie 3
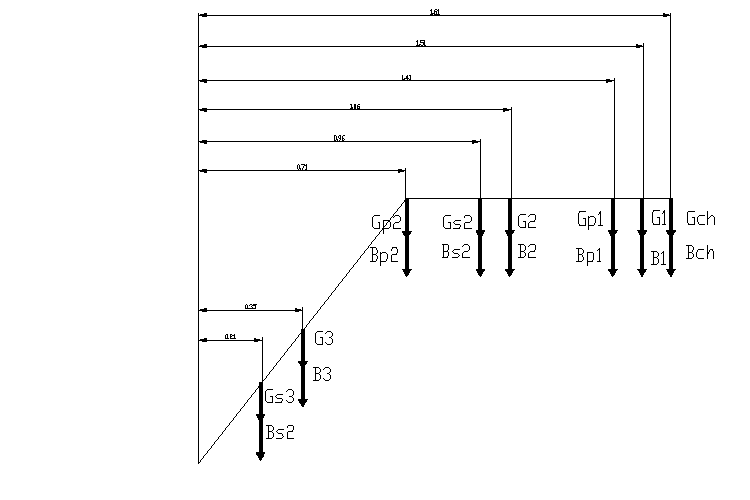
Gch = 127.5 [N]
G1 = 16.2 [N
Gp1 = 14.7 [N]
G2 = 87.8 [N]
Gs1 = 44.1 [N]
Gp2 = 29.4 [N]
G3 = 176.6 [N]
Gs2 = 117.7 [N]
Bch = 1.3[N]
B1 = 0.08 [N]
Bp1 = 0.15 [N]
B2 = 0.44 [N]
Bs1 = 0.16 [N]
Bp2 = 0.3 [N]
B3 = 0.9[N]
Bs2 = 0.36 [N]
M3 = (Gch + Bch)*1.61 + (G1 + B1)*1.51 + (Gp1+ Bp1)*1.41 + (G2 + B2)*1.06 + (Gs1 + Bs1)*0.96 + (Gp2+ Bp2)*0.71 + (G3 + B3)*0.35 + (Gs2 + Bs2)*0.21
M3 = 497 [Nm]
Słup
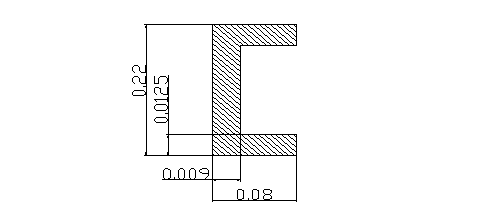
a = 2 [m/s2]
r = 1.61 [m]

J = J1 - J2 = 0.00001 m4
ε = a/r = 2/ 1.61 = 1.24 [1/s2]
Ma = J*ε = 0.00001 * 1.24 = 0.0000124 [Nm]
Gch = 127.5 [N]
G1 = 16.2 [N
Gp1 = 14.7 [N]
G2 = 87.8 [N]
Gs1 = 44.1 [N]
Gp2 = 29.4 [N]
G3 = 176.6 [N]
Gs2 = 117.7 [N]
Bch = 26[N]
B1 = 3.1 [N]
Bp1 = 2.6 [N]
B2 = 11.8 [N]
Bs1 = 5.3 [N]
Bp2 = 2.6 [N]
B3 = 7.7 [N]
Bs2 = 3.2 [N]
Mb = (Gch + Bch)*1.61 + (G1 + B1)*1.51 + (Gp1+ Bp1)*1.41 + (G2 + B2)*1.06 + (Gs1 + Bs1)*0.96 + (Gp2+ Bp2)*0.71 + (G3 + B3)*0.35 + (Gs2 + Bs2)*0.21
Mb = 566.285 [Nm]
M4 = Ma +Mb = 0.0000124 + 566.285
M4 = 566.2850124 [Nm]
4.Dobór przekładni oraz silników
4.1 Dobór silnika pierwszego oraz przekładni .
Dla ramiona pierwszego dobrano silnik o mocy Mn = 8.85 [Nm] o oznaczeniu E34-NRFx-LNN-NS-00.
Mn = 8.85 [Nm] .
Mo = 28 [Nm] moment potrzebny do wprawienia w ruch ramienia pierwszego.
rn - promień napędzającego koła pasowego.
ro - promień napędzanego koła pasowego.
Fn - siła uzyskana na kole napędzającym.
Fo - siła uzyskana na kole napędzanym.
Przyjmujemy rn =0.03 [m]
Mn = Fn * rn
Fn = Mn / rn = 8.85/ 0.03 = 295 [N]
Fn = Fo =295 [N]
Mo = Fo * ro
ro = Mo / Fo =28 / 295 = 0.095 [m]
ro = 0,095 [m]
4.2 Dobór silnika drugiego oraz przekładni.
Dla ramiona drugiego dobrano silnik o mocy Mn = 19 [Nm] o oznaczeniu E42 HMFx-LNK-NS-00 .
Mn = 19 [Nm]
Mo = 181 [Nm] moment potrzebny do wprawienia w ruch ramienia drugiego.
rn - promień napędzającego koła pasowego.
ro - promień napędzanego koła pasowego.
Fn - siła uzyskana na kole pasowym napędzającym.
Fo - siła uzyskana na kole pasowym napędzanym.
r1 - promień napędzającego koła zębatego.
r2 - promień napędzanego koła zębatego.
F1 - siła uzyskana na kole zębatym napędzającym.
F2 - siła uzyskana na kole zębatym napędzanym.
M - moment przenoszony przez koła zębate
Przyjmujemy r1 =0.03 [m]
F1 = Mn / r1 = 19/ 0.03 = 633,3 [N]
F1 = F2 =633.3 [N]
Przyjmujemy r2 =0.11 [m]
M = F2 * r2 = 633.3 * 0.11 = 69.66 [Nm]
Przyjmujemy rn =0.05 [m]
Fn = M / rn = 69.66 / 0.05 = 1393.26 [N]
Fn = Fo =1393.26 [N]
Mo = Fo * ro
ro = Mo / Fo =181 / 1393.26 = 0,129 [m]
ro = 0.13 [m]
4.3 Dobór silnika trzeciego oraz przekładni.
Dla ramiona trzeciego dobrano silnik o mocy Mn = 28 [Nm] o oznaczeniu E43 HMFx-LNK-NS-00 .
Mn = 28 [Nm]
Mo = 497 [Nm] moment potrzebny do wprawienia w ruch ramienia trzeciego.
rn - promień napędzającego koła pasowego.
ro - promień napędzanego koła pasowego.
Fn - siła uzyskana na kole pasowym napędzającym.
Fo - siła uzyskana na kole pasowym napędzanym.
r1 - promień napędzającego koła zębatego.
r2 - promień napędzanego koła zębatego.
F1 - siła uzyskana na kole zębatym napędzającym.
F2 - siła uzyskana na kole zębatym napędzanym.
M - moment przenoszony przez koła zębate
Przyjmujemy r1 =0.035 [m]
F1 = Mn / r1 = 28/ 0.035 = 800 [N]
F1 = F2 = 800 [N]
Przyjmujemy r2 =0.16 [m]
M = F2 * r2 = 800 * 0.16 = 128 [Nm]
Przyjmujemy rn =0.06 [m]
Fn = M / rn = 128 / 0.06 = 2133 [N]
Fn = Fo = 2133 [N]
Mo = Fo * ro
ro = Mo / Fo = 497 / 2133 = 0,235 [m]
ro = 0.235 [m]
4.4 Dobór silnika czwartego oraz przekładni.
Dla obrotu wokół osi całego robota dobrano silnik o mocy Mn = 28 [Nm] o oznaczeniu E43 HMFx-LNK-NS-00 .
Mn = 28 [Nm]
Mo = 567 [Nm] moment potrzebny do wprawienia w ruch robota .
r1 - promień napędzającego koła zębatego.
r2 - promień napędzanego koła zębatego.
F1 - siła uzyskana na kole zębatym napędzającym.
F2 - siła uzyskana na kole zębatym napędzanym.
M1 - moment przenoszony przez pierwsza parę kół zębatych.
r3 - promień napędzającego koła zębatego.
r4 - promień napędzanego koła zębatego.
F3 - siła uzyskana na kole zębatym napędzającym.
F4 - siła uzyskana na kole zębatym napędzanym.
M2 - moment przenoszony przez drugą parę kół zębatych.
r5 - promień napędzającego koła zębatego.
r6 - promień napędzanego koła zębatego.
F5 - siła uzyskana na kole zębatym napędzającym.
F6 - siła uzyskana na kole zębatym napędzanym
Przyjmujemy r1 =0.035 [m]
F1 = Mn / r1 = 28/ 0.035 = 800 [N]
F1 = F2 = 800 [N]
Przyjmujemy r2 =0.1 [m]
M1 = F2 * r2 = 800 * 0.1 = 80 [Nm]
Przyjmujemy r3 =0.04 [m]
F3 = M1 / r3 = 80 / 0.04 = 2000 [N]
F3 = F4 = 2000 [N]
Przyjmujemy r4 =0.12 [m]
M2 = F4 * r4 = 2000 * 0.12 = 240 [Nm]
Przyjmujemy r5 =0.04 [m]
F5 = M2 / r5 = 240 / 0.04 = 6000 [N]
F5 = F6 = 6000 [N]
Mo = F6 * r6
R6 = Mo / F6 = 567 / 6000 = 0,095 [m]
r6 = 0.1 [m]
1
Wyszukiwarka
Podobne podstrony:
Projekt manipulatora, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, A PROJEKT MANIPULA
Konstruowanie katalogowe manipulatorów, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty,
pkm, Automatyka i Robotyka, Semestr 5, PKM, projekty
pstan, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Manip
Manipulator, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty
man r2, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Mani
man r3, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty, Projekty - multum ciulstwa, Mani
Manipulator 3, Automatyka i Robotyka, Semestr 5, PKM, projekty, projekty
Pytania z PKM, Automatyka i Robotyka, Semestr 5, PKM, pytania
POLITECHNIKA ŚLĄSKA W GLIWICACH fffffff, Automatyka i Robotyka, Semestr IV, Podstawy Konstrukcji mas
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
Analiza cyklogramu szeregowego, Automatyka i Robotyka, Semestr 2, Robotyzacja, projekt, projekt 2
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
więcej podobnych podstron