21
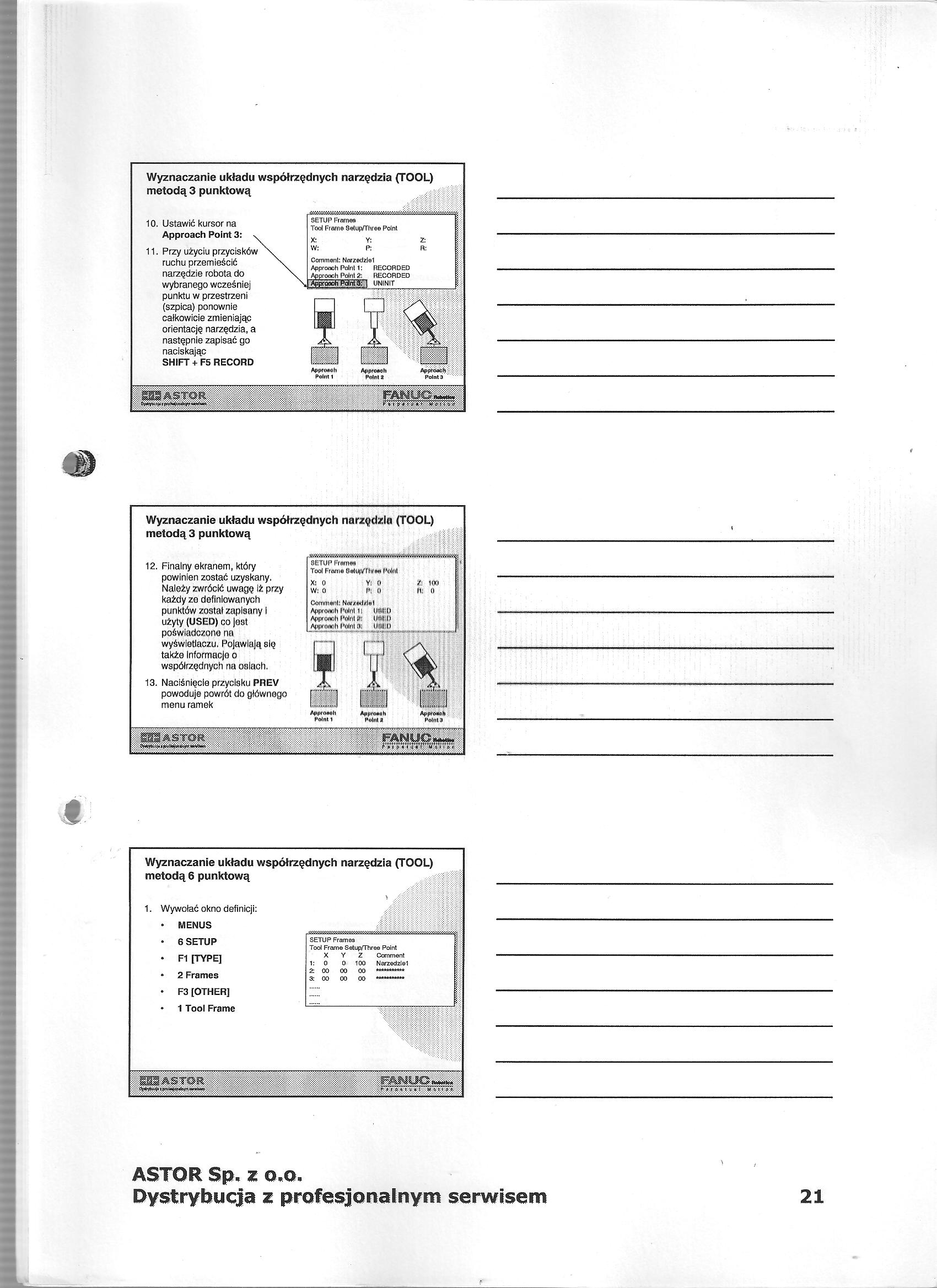
10. Ustawić kursor na Approach Point 3:
11. Przy użyciu przycisków ruchu przemieścić narzędzie robota do wybranego wcześniej punktu w przestrzeni (szpica) ponownie całkowicie zmieniając orientację narzędzia, a następnie zapisać go naciskając
SHIFT + F5 RECORD
SETUP Promoo
Tool Framo 8«tup/Thr*e Point
X: Y:
W: P:
ŁT-asaagjiifcai
MA STOR
Commont: Nnrzedzlol Appronch Point 1: FtECORDED HECORDED UNINIT

I • • • X
12. Finalny ekranem, który powinien zostać uzyskany. Należy zwrócić uwagę iż przy każdy zo definiowanych punktów został zapisany I użyty (USED) co jost poświadczono no wyświetlaczu. Pojawiają się także Informacjo o współrzędnych na osiach.
13. Naciśnięcie przycisku PREV powoduje powrót do głównego menu ramek
SETUP Franwn
Tool Prom* OtiUftfThfM Polni
Commeiil: Nra/nti/lnl Approanh Polni M Uflt-D
Approfwh Point v\ tlnt l)
ApprtMeh Polni & UlŚt)
rANUC.-u^
:i f H WTWMWfi VV«, i;
|
Wyznaczanie układu współrzędnych narzędzia (TOOL) | ||
|
metodą 6 punktową | ||
|
1. Wywołać okno definicji: | ||
|
• MENUS | ||
|
• 6 SETUP |
SETUP Frames Tool Frame Setup^Three Point X Y Z Comment 1: 0 0 100 Narzedzlol | |
|
* F1 [TYPE] | ||
|
• 2 Frames |
2: 00 00 00 *********** 3: 00 00 00 *********** | |
|
• F3 [OTHER] | ||
|
• 1 Tool Frame | ||
|
gil:- • < • dy^po z,* J jw.l-ł.ąufoy* | ||
21
Wyszukiwarka
Podobne podstrony:
26 2 Wyznaczanie układu współrzędnych narzędzia (TOOL) metodą bezpośredniego wpisu parametrów 6.
15 2 Wyznaczanie układu współrzędnych użytkownika (USER) metodą 4 punktową 14. Ust
06 2 Wyznaczanie układu współrzędnych JGFRM metodą 3 punktową 12. Ustawić kursor
19 2 Układ współrzędnych narzędzia (TOOL) • Metody definicji: ■ ♦ 3
Metoda różnicowa umożliwia wyznaczenie różnic współrzędnych dwóch punktów, w których są ustawiane
SL274256 Metoda punktowa Za udziec 25 pkt Za grzbiet 25 pkt Za łopatkę 15 pkt Za szyję 10
zad 8 roz 7. Wyznaczyć metodą punktów przebicia przekrój ostrosłupa ukośnego płaszczyzną a zadaną śl
75 5.1. Estymacja punktowaZadanie 5.1.10. Metodą momentów znaleźć estymator parametru a w populacji
CCF20120309�001 (2) Zadanie 10. (1 pkt) Wykres funkcji liniowej znajduje się w II i IV ćwiartce ukła
CCI20100414�012 3. Konstruowanie zęba koła zębatego o zarysie przesuniętym; ewolwenta wyznaczana met
Wyznacz równanie prostej przechodzącej przez punkt (1,1), która wraz z osiami układu współrzędnych
Wyznaczenie wartości parametrów wytrzymałościowych w oparciu o aproksymację punktów pomiarowych Meto
3.4.1 Obliczenie terenowych współrzędnych pomierzonych na zdjęciach punktów Aby wyznaczyć położenie
slajd40 (13) Wyznaczyć prawdziwą wielkość odcinka AB metodą transformacji układu odniesien
więcej podobnych podstron