DSCN0524
85
84
2. Geometria i kinematyka cwolwcntowych przekładni walcowych
2.3. Kinematyka przekładni walcowych
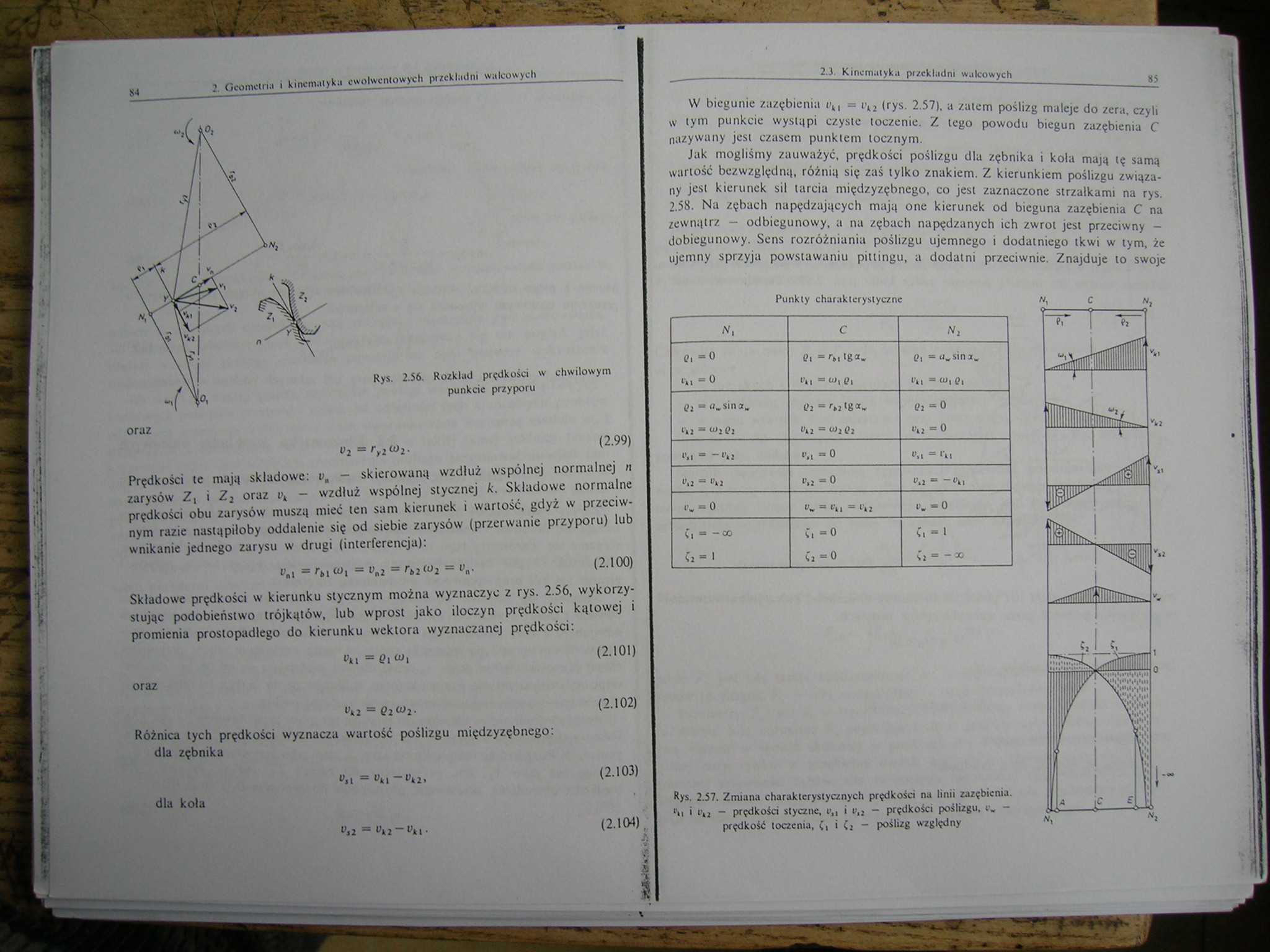
W biegunie zazębienia t>k, = vki (rys. 2.57). a zatem poślizg maleje do zera. czyli w tym punkcie wystąpi czyste toczenie. Z lego powodu biegun zazębienia C nazywany jest czasem punkiem tocznym.
Jak mogliśmy zauważyć, prędkości poślizgu dla zębnika i kola mają tę samą wartość bezwzględną, różnią się zaś tylko znakiem. Z kierunkiem poślizgu związany jest kierunek sil tarcia międzyzębnego, co jest zaznaczone strzałkami na rys. 2.58. Na zębach napędzających mają one kierunek od bieguna zazębienia C na zewnątrz — odbiegu nowy, a na zębach napędzanych ich zwrot jest przeciwny -dobiegunowy. Sens rozróżniania poślizgu ujemnego i dodatniego tkwi w tym, że ujemny sprzyja powstawaniu pittingu, a dodatni przeciwnie. Znajduje to swoje
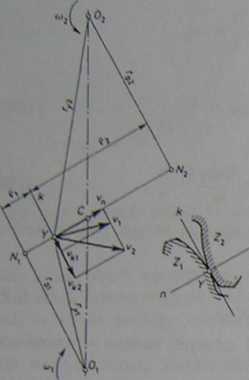
Rys. 2.56. Rozkład prędkości w chwilowym punkcie przyporo
oraz
Wpm ĘM (2.99)
Prędkości te maju składowe: vn - skierowaną wzdłuż wspólnej normalnej n zarysów Z, i Z2 oraz ok - wzdłuż wspólnej stycznej k. Składowe normalne prędkości obu zarysów muszą mieć ten sam kierunek i wartość, gdyż w przeciwnym razie nastąpiłoby oddalenie się od siebie zarysów (przerwanie przyporu) lub wnikanie jednego zarysu w drugi (interferencja):
= Ifj <*>'i = Ki = rb2 (Oj = vn. (2.100)
Składowe prędkości w kierunku stycznym można wyznaczyć z rys. 2.56, wykorzystując podobieństwo trójkątów, lub wprost jako iloczyn prędkości kątowej i promienia prostopadłego do kierunku wektora wyznaczanej prędkości:
(2.101) (2.102)
(2.103)
(2.104)
Si = Qi<»i
oraz
vk2 =Qi<D 2.
Różnica tych prędkości wyznacza wartość poślizgu międzyzębnego: dla zębnika
dla kola
Punkty charakterystyczne
|
i |
c |
Nl |
|
Cl - o |
Ci " rM tga„ |
Ci = <iwsinocw |
|
$1 - o |
0»i ““iCi |
0»i -<o,p, |
|
Oi m <ł„$ina„ |
C: = rM Iga. |
Cj “0 |
|
fki — u>i01 |
0»i “ wiCi |
0»i -0 |
|
li ■ -fu |
t),i = 0 |
».i = ||j |
|
0.1 - 0»i |
o,i = 0 |
0.1 “ -0»l |
|
!»<= p |
0- = »U = 0»1 |
t II o |
|
Cl “ - co |
i -o |
Cl = 1 |
|
Ci" i |
Ci - o |
Cl = -» |
Rys, 2.57. Zmiana charakterystycznych prędkości na linii zazębienia. 1 i t>„ - prędkości styczne, i>„ i i>,j - prędkości poślizgu, -prędkość toczenia. Ci * Cr — poślizg względny

®«1 =
Wyszukiwarka
Podobne podstrony:
DSCN0502 2. Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 24. Frezowanie kształtowe
DSCN0504 44 2 Geometria i kinematyka cwolwcnlowych przekładni walcowych 44 2 Geometria i kinematyka
DSCN0509 I 54_2. Geometria i kinematyka cwolwcntowych przekładni walcowych Ze względu na to, że lini
DSCN0513 62_2. Geometria i kinematyka cwolwcntowych przekładni walcowych_ wzorów (rys. 2.33): c, = «
DSCN0519 74 2. Geometria i kinematyka cwolwcntówych przekładni walcowych Stąd =
DSCN0522 i i 80 2 Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 153. Długości linii
DSCN0501 .w 2. Geometria i kinematyka ewolwcntowych przekładni walcowych Zarys zęba jesi symetryczny
DSCN0503 2. Geometria i kinematyka ewolwentowych przekładni walcowych ■sina Dla zalecanej wartości l
DSCN0508 2. Geometria i kinematyka ewolwentowych przekładni walcowych dość istotna jest w obliczenia
DSCN0510 I & i Geometria i kinematyka ewolwentowych przekładni walcowych Wynik
DSCN0514 2. Geometria i kinematyka ęwolwcniowych przekładni walcowych 64 Po wstawieniu odpowiednich
DSCN0515 66 2. Geometria i kinematyka cwolwenlowych przekładni walcowych wzajemnie położone, aby okr
DSCN0516 I 68_2. Geometria i kinematyka cwplwcntowych przekładni walcowych Kolejny warunek nieinierf
DSCN0526 88 2. Geometria i kinematyka ewolwentowych przekładni walcowych Prędkość poślizgu zmienia s
DSCN0525 2. (IwnKlna 8t« kincinulykii cwolwcnłowych przekładni walcowych Rys 2.58. Zmiana prędk
DSCN0506 2 Geometria i Łinemalyfca cwolwcnrowych preekładni wjkx>«ych przy czy w 2 Geometria i Łi
DSCN0520 2. Geometria i kinematyka cwoiwenipmych pfzeklaJm walw*>e>> 12.71) Uwzględniając
Łacina str? 85 84 tcrrajm vestram venero, finlbus vos expcllam”. Lacedaemonii rcsponderunt: „Si”. Il
więcej podobnych podstron