DSCN0514
2. Geometria i kinematyka ęwolwcniowych przekładni walcowych
64
Po wstawieniu odpowiednich wyrażeń otrzymamy:
9. = *bi tg*.i + rbi tg - fei + rbi) tg *»• (2-48)
lub też w innej postaci:
9* tf nA,2i -rii + \/rli — rłi — o» sinscw. (2.49)
Ostatecznie wzór na wskaźnik przyporu (czołowego) dla zazębienia kół o zębach prostych przybierze postać:
łki tg«.i +'-42tgao2-(',6i +r62)tgaw _
= —-— =
nmn cos a
= — [r, (tga„| -tgaJ + r2(tgao2-tgaJ] (2.50)
2n
lub
| _ y/tii-rbi+s/r;2-rł2-aws\nzw g|j|
nmR cos a
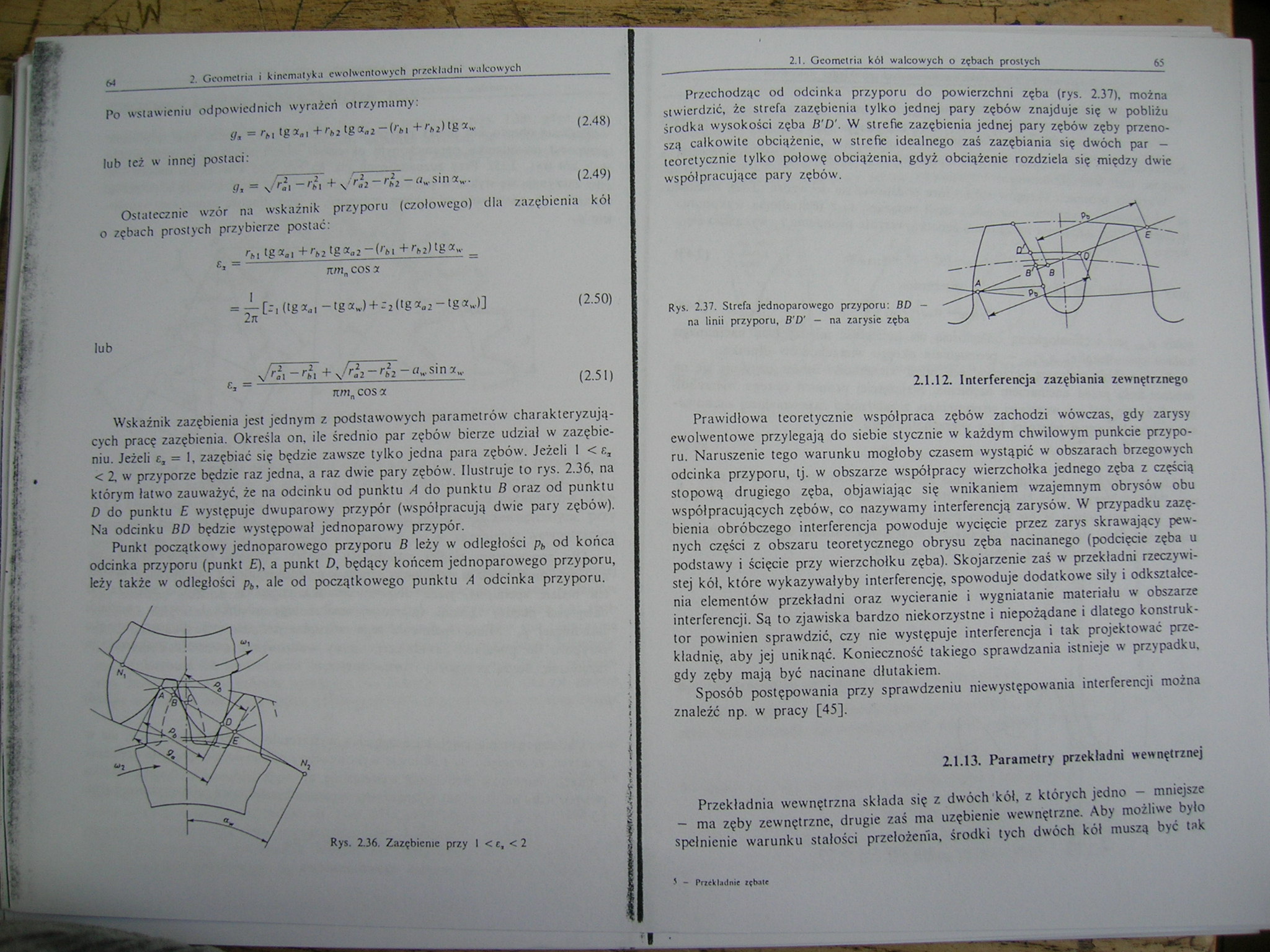
Wskaźnik zazębienia jest jednym z podstawowych parametrów charakteryzujących pracę zazębienia. Określa on, ile średnio par zębów bierze udział w zazębieniu. Jeżeli z. = 1, zazębiać się będzie zawsze tylko jedna para zębów. Jeżeli I < ia < 2, w przyporze będzie raz jedna, a raz dwie pary zębów. Ilustruje to rys. 2.36, na którym łatwo zauważyć, że na odcinku od punktu A do punktu B oraz od punktu D do punktu E występuje dwuparowy przypór (współpracują dwie pary zębów). Na odcinku BD będzie występował jednoparowy przypór.
Punkt początkowy jednoparowego przyporu B leży w odległości pb od końca odcinka przyporu (punkt £), a punkt D, będący końcem jednoparowego przyporu, leży także w odległości pb, ale od początkowego punktu A odcinka przyporu.
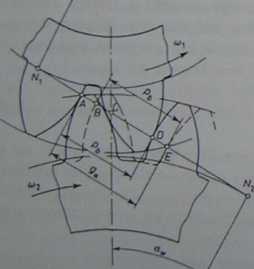
Rys. 2.36. Zazębienie przy I < e, < 2
Przechodząc od odcinka przyporu do powierzchni zęba (rys. 2.37), można stwierdzić, że strefa zazębienia tylko jednej pary zębów znajduje się w pobliżu środka wysokości zęba B'D'. W strefie zazębienia jednej pary zębów zęby przenoszą całkowite obciążenie, w strefie idealnego zaś zazębiania się dwóch par -teoretycznie tylko połowę obciążenia, gdyż obciążenie rozdziela się między dwie współpracujące pary zębów.

2.1.12. Interferencja zazębiania zewnętrznego
Prawidłowa teoretycznie współpraca zębów zachodzi wówczas, gdy zarysy ewolwentowe przylegają do siebie stycznie w każdym chwilowym punkcie przyporu. Naruszenie tego warunku mogłoby czasem wystąpić w obszarach brzegowych odcinka przyporu, tj. w obszarze współpracy wierzchołka jednego zęba z częścią stopową drugiego zęba, objawiając się wnikaniem wzajemnym obrysów obu współpracujących zębów, co nazywamy interferencją zarysów. W przypadku zazębienia obróbczego interferencja powoduje wycięcie przez zarys skrawający pewnych części z obszaru teoretycznego obrysu zęba nacinanego (podcięcie zęba u podstawy i ścięcie przy wierzchołku zęba). Skojarzenie zaś w przekładni rzeczywistej kół, które wykazywałyby interferencję, spowoduje dodatkowe siły i odkształcenia elementów przekładni oraz wycieranie i wygniatanie materiału w obszarze interferencji. Są to zjawiska bardzo niekorzystne i niepożądane i dlatego konstruktor powinien sprawdzić, czy nie występuje interferencja i tak projektować przekładnię, aby jej uniknąć. Konieczność takiego sprawdzania istnieje w przypadku, gdy zęby mają być nacinane dłutakiem.
Sposób postępowania przy sprawdzeniu niewystępowania interferencji można znaleźć np. w pracy [45].
2.1.13. Parametry przekładni wewnętrznej
Przekładnia wewnętrzna składa się z dwóch 'kół, z których jedno — mniejsze — ma zęby zewnętrzne, drugie zaś ma uzębienie wewnętrzne. Aby możliwe było spełnienie warunku stałości przełożenia, środki tych dwóch kół muszą być tak
i - Przekładnie zębate
Wyszukiwarka
Podobne podstrony:
DSCN0501 .w 2. Geometria i kinematyka ewolwcntowych przekładni walcowych Zarys zęba jesi symetryczny
DSCN0502 2. Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 24. Frezowanie kształtowe
DSCN0503 2. Geometria i kinematyka ewolwentowych przekładni walcowych ■sina Dla zalecanej wartości l
DSCN0508 2. Geometria i kinematyka ewolwentowych przekładni walcowych dość istotna jest w obliczenia
DSCN0510 I & i Geometria i kinematyka ewolwentowych przekładni walcowych Wynik
DSCN0504 44 2 Geometria i kinematyka cwolwcnlowych przekładni walcowych 44 2 Geometria i kinematyka
DSCN0509 I 54_2. Geometria i kinematyka cwolwcntowych przekładni walcowych Ze względu na to, że lini
DSCN0513 62_2. Geometria i kinematyka cwolwcntowych przekładni walcowych_ wzorów (rys. 2.33): c, = «
DSCN0515 66 2. Geometria i kinematyka cwolwenlowych przekładni walcowych wzajemnie położone, aby okr
DSCN0516 I 68_2. Geometria i kinematyka cwplwcntowych przekładni walcowych Kolejny warunek nieinierf
DSCN0519 74 2. Geometria i kinematyka cwolwcntówych przekładni walcowych Stąd =
DSCN0522 i i 80 2 Geometria i kinematyka cwolwcntowych przekładni walcowych Rys. 153. Długości linii
DSCN0524 85 84 2. Geometria i kinematyka cwolwcntowych przekładni walcowych 2.3. Kinematyka przekład
DSCN0526 88 2. Geometria i kinematyka ewolwentowych przekładni walcowych Prędkość poślizgu zmienia s
DSCN0520 2. Geometria i kinematyka cwoiwenipmych pfzeklaJm walw*>e>> 12.71) Uwzględniając
DSCN0518 72 2, Geometria i kincmnlykii ewolwcmowych pr/cklntlni wulcowych Rys. 2.46. Nacinanie zębów
DSCN0525 2. (IwnKlna 8t« kincinulykii cwolwcnłowych przekładni walcowych Rys 2.58. Zmiana prędk
DSCN0527 90 .V Wytrzymałość przekładni walcowych Cala trudność polega jednak na łym, że zarówno obci
więcej podobnych podstron