HPIM0834
0. Nłipęrly robotów pr/omytlowydi
/owego. W celu /upewnieniu pracy silnika ze stałym strumieniem wzbudzą I (stałym dopuszczalnym momentem odciążenia) należy wraz ze zmianą Cz^j ■ tliwości zasilania dokonywać odpowiedniej korekcji amplitudy napięcia zasjL I jącogn wg zależności
/ ^ Asynchroniczny silnik prądu przemiennego o regulowanej prędkości oK rolowej jest członem wykonawczym zespołu stcrująco napędowego (rys, 6.19/ w skład którego wchodzą: prostownik przekształcający trójfazowy prąd Wg mienny na prąd stały, przemiennik częstotliwości i zespół generowania trójfa zowego prądu (falownik) zasilającego silnik oraz odpowiednie układy sterowa nia i regulacji.
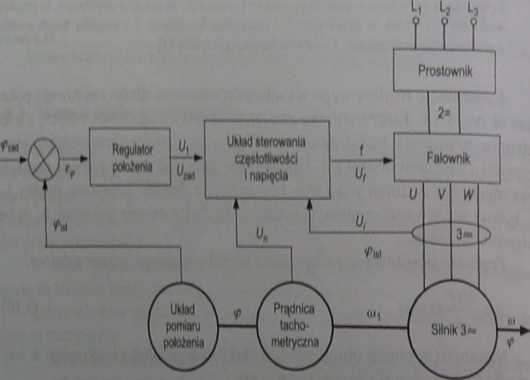
Rysunek 6.19 . I
Podstawowy schemat blokowy układu sorwonnpądowcgo prądu przomiennogo z silnikiem I asynchronicznym
W układzie pokazanym na rys. 6.19 trójfazowe napięcie z sieci jest pro*I siowunc przez szcściodiodowy prostownik i zasila falownik pracujący niczalcż-l nic od sieci. Trójfazowe sinusoidalne napięcie zasilające silnik jest kształtowane! (rys. 6.20) jako średnia wartość 2 modulowanych szcrokościowo impulsów sio-1 rujących w lun sposób, iż od częstotliwości generowanych impulsów zależy! częstotliwość prądu, od ich szerokości zaś (czasu trwania) - wartość skuteczna!
napięcia wyjściowego
BI ij (unK‘ ln,lsc w/cMi modulation), gdzie! etągu impulsów unipolarnych lub bipolarnych!
174
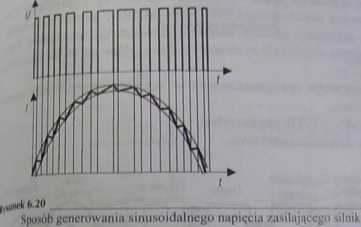
0stałej amplitudzie i zwykle stałym okresie oraz modulowanej szerokości (modulowanym czasie trwania impulsów). Częstotliwość impulsów jest nazywana tfsiotliwością nośną lub częstotliwością przełączeń (ang. carier frcquencyt ^iichingfreąuency). Częstotliwość modulująca szerokość impulsów jest zarazem częstotliwością generowanego prądu.
Zastosowanie mikroprocesorów w napędach prądu przemiennego (napędy cyfrowe) powoduje zastąpienie sprzętowej realizacji układów sterowania i regulacji przez odpowiednie oprogramowanie. Stwarza to dodatkowe możliwości podniesieniu do rozwiązań z regulatorami analogowymi:
- struktura i budowa są niezależne od zadań realizowanych przez układ i mogą być wykonane wg jednolitej koncepcji,
- ńmkcję układu określa program, który w znacznym stopniu nic zależy od sposobu realizacji sprzętowej i może być przygotowany w trakcie projektowania urządzenia,
- korekta właściwości regulacyjnych w czasie rozruchu i eksploatacji urządzenia nie wymaga ingerencji w obiekt fizyczny (zmiany w regulatorach); zmiany algorytmu sterowania dokonuje się za pomocą odpowiedniego programu,
- możliwe jest cyfrowe sprzęgnięcie układu sterowania numerycznego l napędem i dzięki temu znaczne podwyższenie jakości regulacji.
Napędy ze sterowaniem mikroprocesorowym tworzą tzw. serwonapędy cyfrowo, nazywane także inteligentnymi [31]. Koncepcja ta wymaga stosowania cyfrowych interfejsów między sterowaniem numerycznym CNC a sterownikiem napędu. Takie rozwiązanie umożliwia aktywne sterowanie nie tylko wartością zadaną przemieszczenia, ale również prędkością i momentem napędowym.
Dzięki temu możliwe jest osiągunie znacznie korzystniejszych właściwości dynamicznych niż w dotychczasowych scrwonapędach.
Przykładem serwonapędu cyfrowego jest układ S1M0DR1VE 611U (tys. 6.21). Regulacja ruchu jest reuli/.owuna pracz specjalizowany mikroprocc* 17S
Wyszukiwarka
Podobne podstrony:
HPIM0825 6. Napędy robotów pr/wnytłowych6.2. Napędy pneumatyczne Roboty przemysłowe z napędami pneum
mieszanki podawanej do cylindrów, a tym samym i moc osiąganą w każdym cylindrze. W .celu upewnienia
HPIM0803 5. Sterowanie robotów przemysłowych — układów sterować Podstawową, najbardziej rozpowszechn
HPIM0806 5. Stwtiwjn* robotów prnmytlowyrh Interpolacja typu Splinc umożliwia uzyskanie bardzo gładk
HPIM0808 5. Sterowanie robotów piwnystowych Roboty z układami o stałym programie (tzw. pick and plac
HPIM0811 5. Sterowanie robotów przemysłowych Tablica 5.1. Funkcje spełnione przez urządzenia elektry
HPIM0813 S. Sterowanie robotów przemysłowych do jednostki logicznej, w której informacje o wzajemnym
HPIM0814 5. Sterowanie robotów przemysłowych 5. Sterowanie robotów przemysłowych Architektura
HPIM0815 / SHttowmi* fdtoóm pr/*myshwY(ii mięci użytkownika W szczegół noki moduły pamięci operacyjn
HPIM0819 5. Sterowanie robotów przemysłowych Tablica S.1 icd.) I Nr instrukcji Typ
HPIM0821 5, Sterowanie robotów przemysłowych Dlatego też nawigacja wirtualna musi być łączona z inny
HPIM0822 5. Sterowanie robotów przemysłowych gami wszystkich komórek wolnych i zajętych. Komórce poc
HPIM0826 Napędy robotów przemysłowych Pneumatyczne Blok elementów wykonawczych napadu zawiera siłown
HPIM0828 6. Napędy robotów priemyilowyrh 6. Napędy robotów priemyilowyrh jest zbudowany jak chłodnic
HPIM0829 6. Napędy robotów przemysłowych Zastosowanie napędów elektrohydraulicznych w robotach przem
HPIM0832 6. Napędy robotów przemysłowych 6A. Napędy elektryce Sygnał E na wyjściu regulatora położen
HPIM0839 6. Napędy robotów przemysłowych KpandcfcJ*_ Scbemay współpracy mechanizmu dźwigniowego i pr
HPIM0840 6. Napędy robotów przemysłowych a) b) c) Rysunek 6.31 Rodzaje przekł
HPIM0842 6. Napędy robotów przemysłowych Możliwości zastosowania przekładni zębatkowych do zamiany r
więcej podobnych podstron