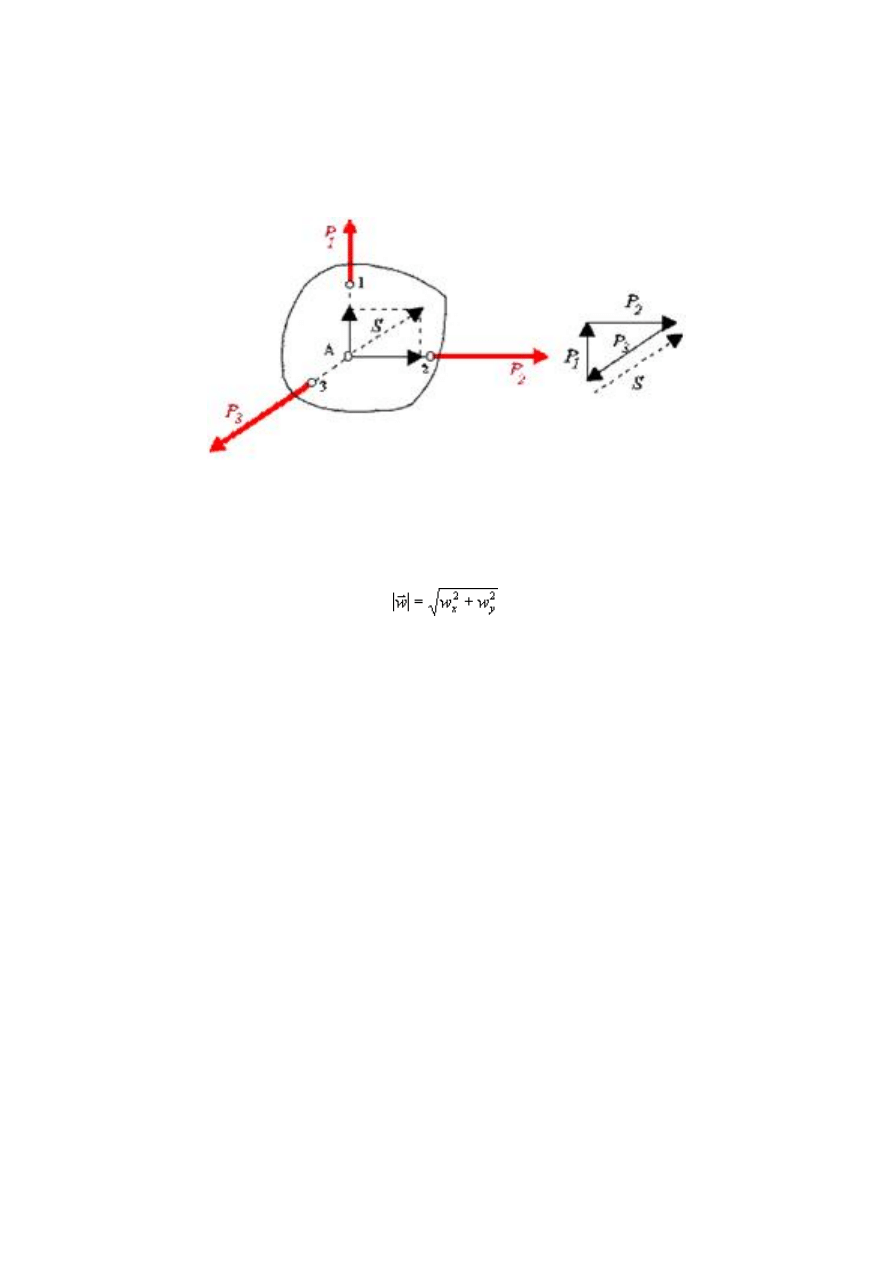
Wyznaczanie wektora sumy sił metodą analityczną
Wyznaczenie wektora wypadkowego w sytuacji działania wielu sił polega na
wykorzystaniu twierdzenia Pitagorasa:
Rys.1 Rozkład sił na składowe
Dzięki możliwości rozłożenia sił w Kartezjańskim układzie współrzędnych można
wyprowadzić wzór na długość wektora:
Wyznaczanie wektora sumy sił możliwe jest dzięki zastosowaniu wzoru:
Żeby dodać dwa wektory metodą analityczną, gdy znamy ich współrzędne, należy
dodać odpowiednie współrzędne - x-owe do x-owych, a y-owe do y-owych (ew. z-
owe do z-owych).
(w
x
, w
y
) + (u
x
, u
y
) = (w
x
+u
x
, w
y
+u
y
)
Moment siły względem punktu.
Moment M
A
siły P względem punktu A jest to iloczyn M
A
=Ph
Mierzymy go w niutonometrach [Nm], gdzie h jest to najkrótszą odległością punktu
A od prostej, na której leży wektor siły P, patrz rysunek nr 2.
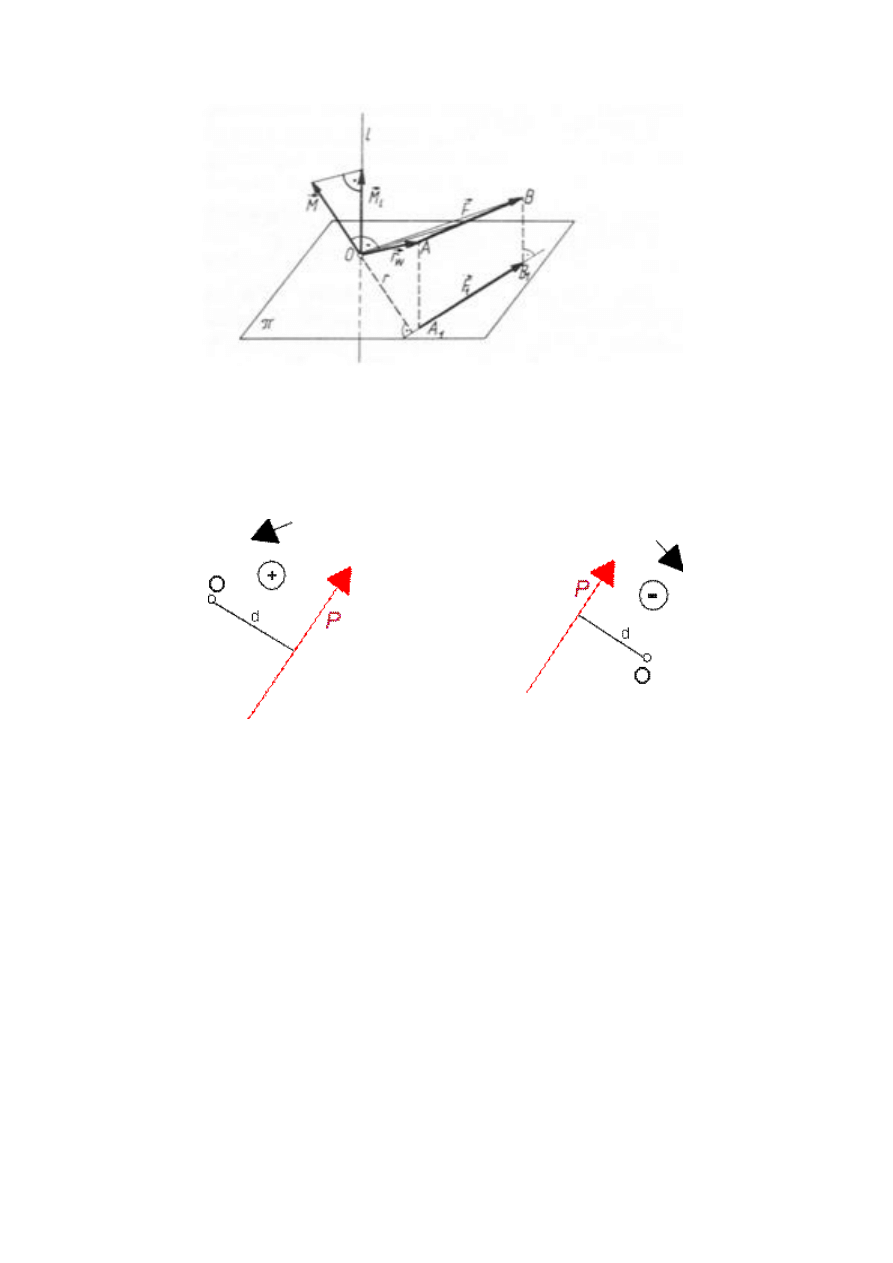
Rys. 2. Wektor momentu siły względem punktu
Odległość h nazywamy ramieniem, na którym siła P wywołuje moment M
A
.
Moment M
A
może mieć znak (+) lub (-).
Aby ustalić znak przeanalizujmy rysunek nr 3.
Rys. 3. Sposób określania znaku momentu
Postępowanie w przypadku redukcji sił do zadanego punktu:
Redukcja sił do zadanego punktu polega na przesuwaniu równoległym tych sił tak
aby ich kierunki przecinały się w jednym punkcie. Następnie wykorzystuje się
możliwość przesuwania wektora wzdłuż linii kierunkowej. W ten sposób tworzony
jest układ zbieżny, który może być rozwiązany za pomocą poznanych wcześniej
metod.
Warunki równowagi dla płaskiego układu sił:
Płaski
dowolny
układ
sił
jest
w
równowadze,
jeżeli
są
równocześnie
spełnione
dwa
warunki:
1.
Algebraiczne
sumy
rzutów
wszystkich
sił
układu
na
dwie
osie
prostokątnego
układu
odniesienia
są
równe
zero.
2.
Moment
główny
układu
względem
dowolnie
obranego
bieguna na płaszczyźnie działania sił jest równy zero.
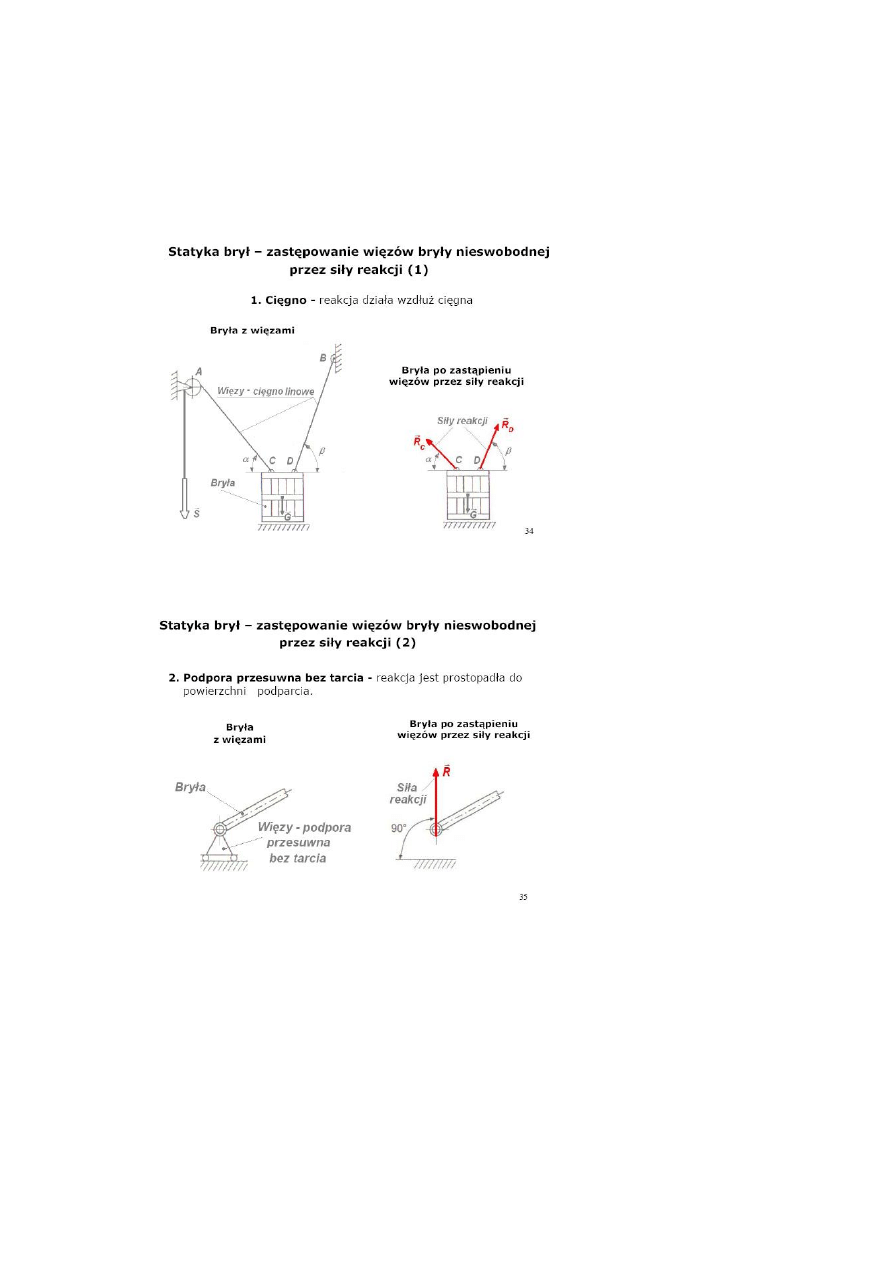
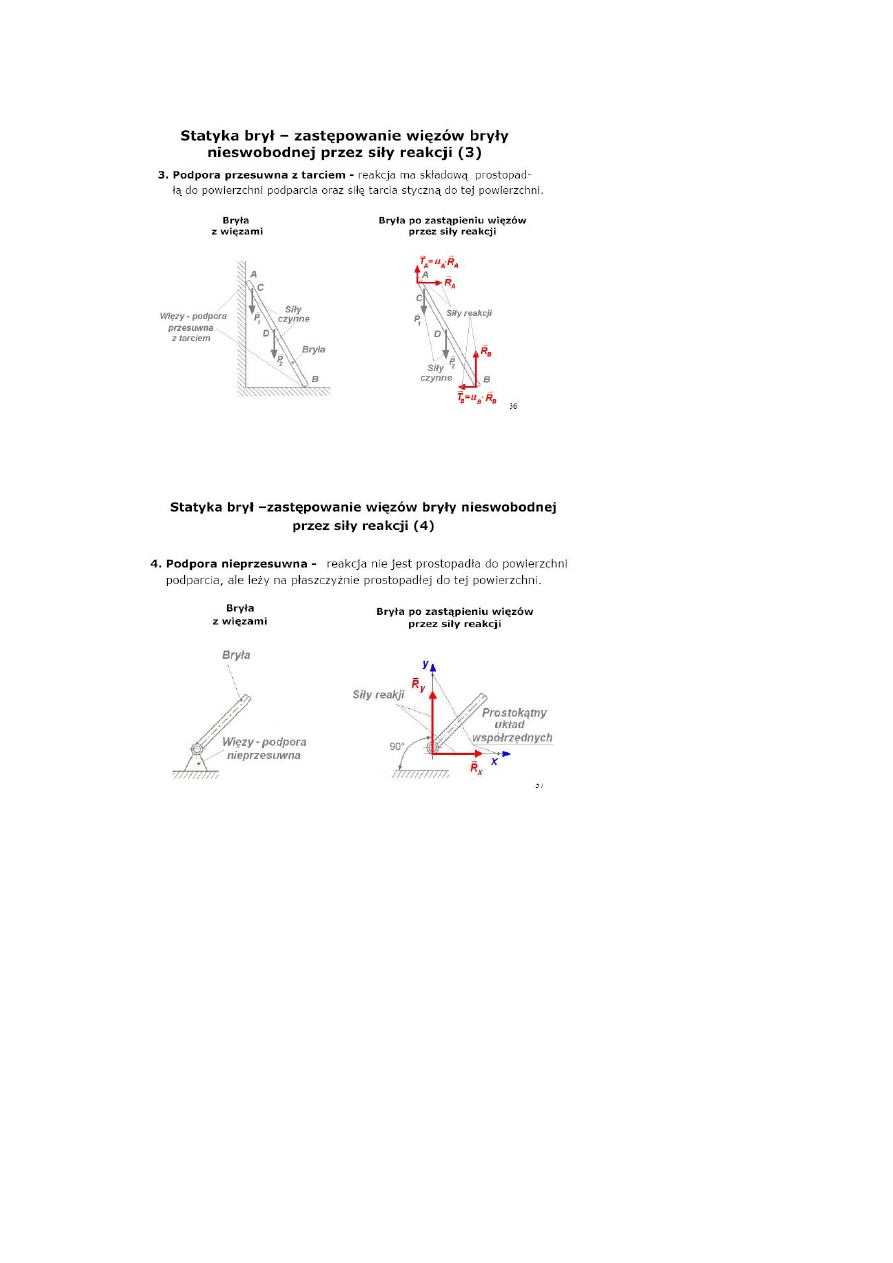
Rodzaje więzów (podpór) oraz rozkład ich sił:
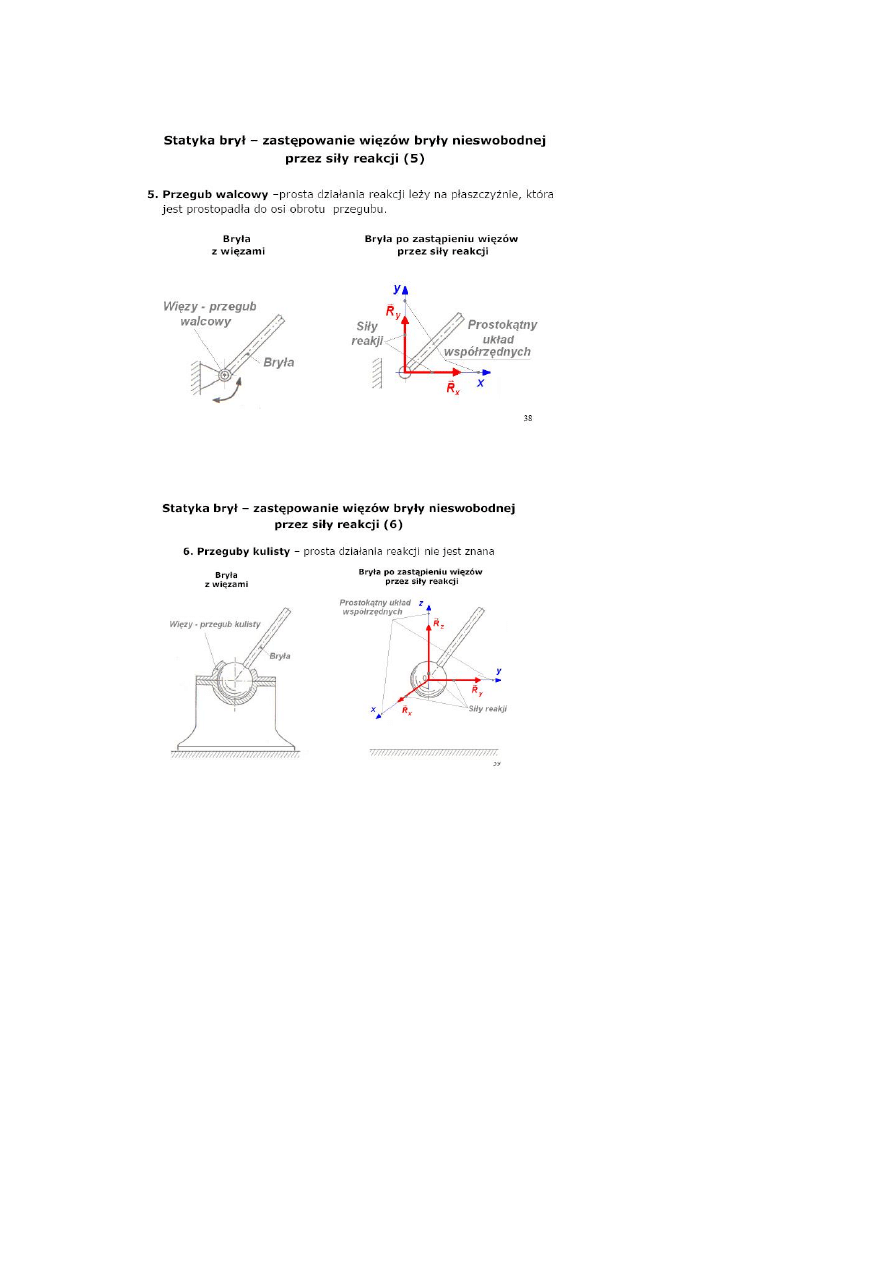
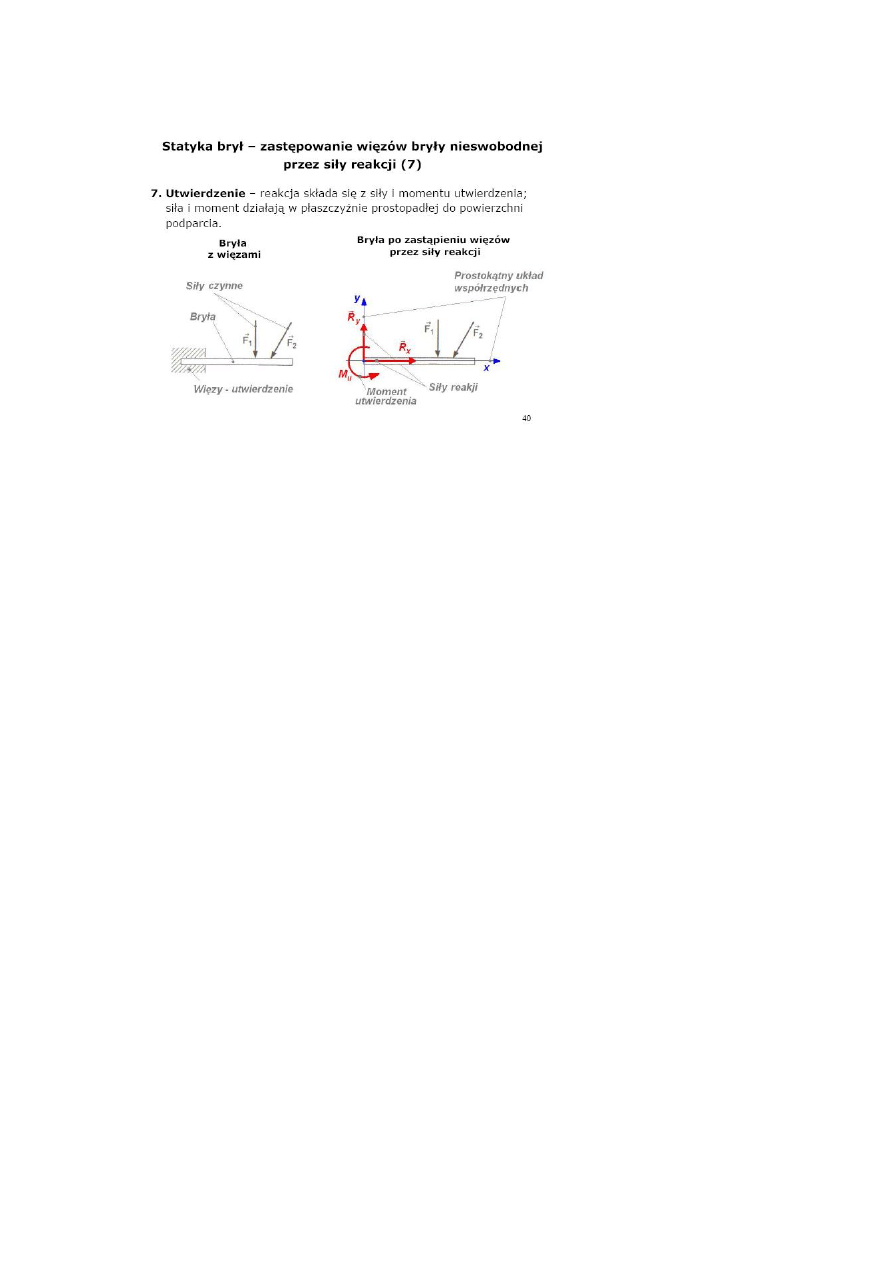
Układ sił jest w równowadze jeśli wypadkowa sił jest równa zero.
Wyszukiwarka
Podobne podstrony:
materialy FUTURA EDUKACJA 1 (1)
materialy FUTURA EDUKACJA 8
materialy FUTURA EDUKACJA 9
materialy FUTURA EDUKACJA 5
materialy FUTURA EDUKACJA 11
materialy FUTURA EDUKACJA 7
materialy FUTURA EDUKACJA 10 id Nieznany
materialy FUTURA EDUKACJA 2 id Nieznany
materialy FUTURA EDUKACJA (1)
materialy FUTURA EDUKACJA
materialy FUTURA EDUKACJA 4 id Nieznany
materialy FUTURA EDUKACJA 1 (1)
materialy FUTURA EDUKACJA 8
więcej podobnych podstron