LABORATORIUM MECHANIKI EKSPERYMENTALNEJ
Instrukcja do ćwiczenia
2
Wyznaczanie momentów bezwładności elementów
maszyn metodą podwieszenia trójpunktowego
Cel
ć
wiczenia
Celem
ć
wiczenia jest zapoznanie z eksperymentalnymi metodami wyznaczania
momentów bezwładno
ś
ci cz
ęś
ci maszyn oraz porównanie ich z metodami
analitycznymi. W ramach realizowanego
ć
wiczenia, wykorzystuje si
ę
metod
ę
podwieszenia trójpunktowego.
Literatura
1.
J.Leyko, Mechanika Ogólna, tom II.
2.
K.Zarankiewicz, Mechanika Teoretyczna, tom III, rozdz. X.
Zagadnienia kontrolne
1. Definicje momentów bezwładno
ś
ci ciała sztywnego:
a) wzgl
ę
dem płaszczyzny,
b) wzgl
ę
dem osi,
c) wzgl
ę
dem punktu.
2. Moment dewiacyjny ciała sztywnego.
3. Umiej
ę
tno
ść
wyznaczenia sposobem analitycznym momentów bezwładno
ś
ci
prostych ciał jednorodnych, jak: walec, kula, sto
ż
ek, sto
ż
ek
ś
ci
ę
ty itp.
4. Twierdzenie Steinera.
5. Analityczne wyznaczenie momentów bezwładno
ś
ci ciała zło
ż
onego z prostych
elementów.
6. Dynamiczne równanie ruchu obrotowego ciała sztywnego.
7. Umiej
ę
tno
ść
tworzenia dynamicznych równa
ń
ruchu ciała sztywnego w ruchu
obrotowym.
Uwaga. Instrukcja dotyczy podstaw samego
ć
wiczenia. Aby opanowa
ć
powy
ż
sze
zagadnienia nale
ż
y si
ę
gn
ąć
do podanej literatury.
Podstawy teoretyczne dotyczące przeprowadzenia eksperymentu
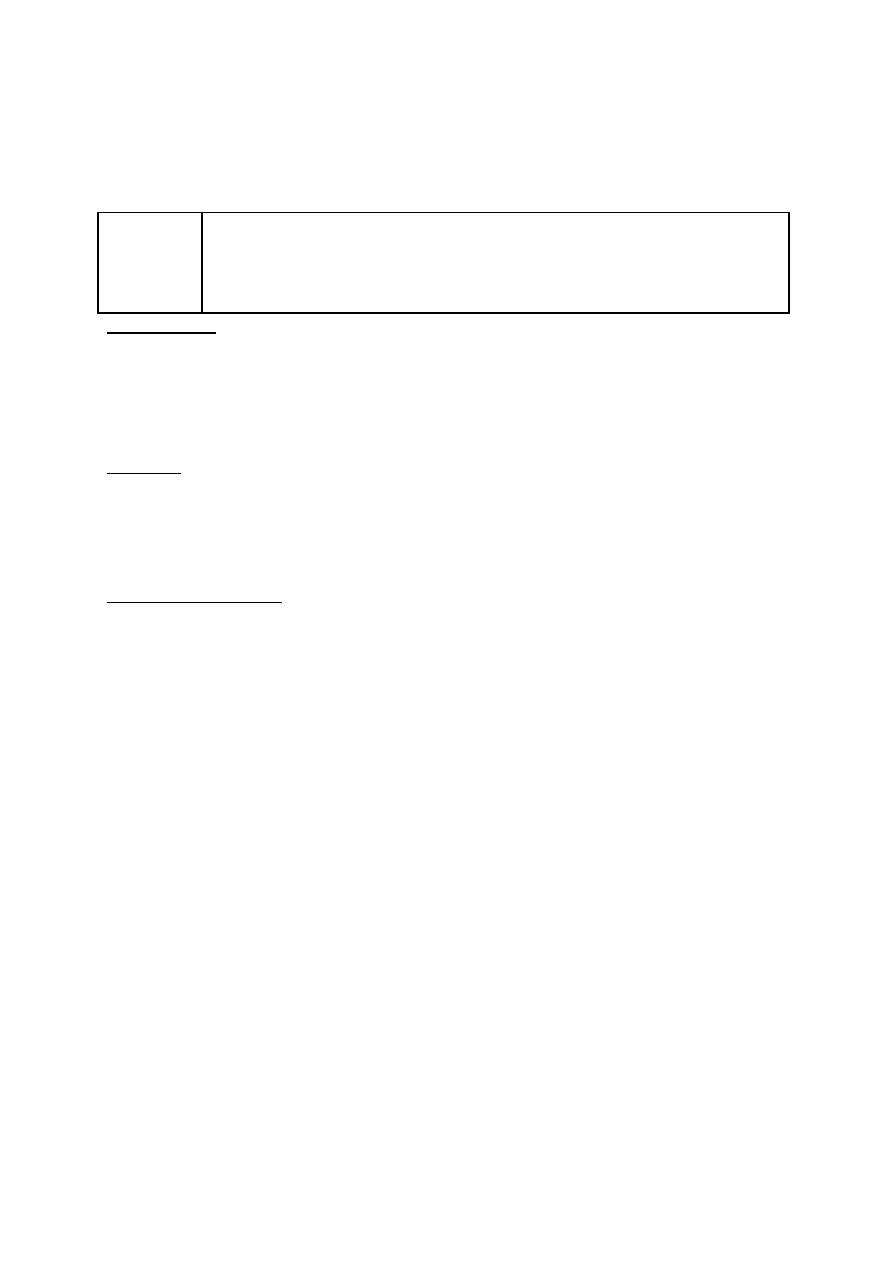
Rozpatrzymy swobodne drgania obrotowe układu, w którym na trzech jed-
nakowych niciach zawieszono kołow
ą
tarcz
ę
o masie m
t
. Układ ten pokazano
schematycznie na rys.1. Tarcza zawsze powinna si
ę
znajdowa
ć
w poło
ż
eniu
poziomym.
Rys.1. Schemat układu dla metody trójpunktowego podwieszenia
Na tarczy kładziemy element
obrotowego układu, składaj
ą
gdzie: J
t
- moment bezwładno
płaszczyzny tarczy
J
e
- moment bezwładno
M - moment, wzgl
ę
dem tej samej osi, sił oddziaływuj
z poło
ż
enia równowagi,
ϕ
- k
ą
t obrotu tarczy.
Moment sił M mo
ż
na okre
ś
li
ć
gdzie: r - odległo
ść
linki od osi
Dla małych k
ą
tów (
ψ
<10°) mo
przyjmie posta
ć
:
Dla małych k
ą
tów mo
ż
na zapisa
gdzie l – długo
ść
linki.
Rys.1. Schemat układu dla metody trójpunktowego podwieszenia
kładziemy element o masie m
e
. Równanie dynamiczne ruchu
składaj
ą
cego si
ę
z tarczy i badanego elementu, ma posta
(
)
0
=
+
+
M
J
J
e
t
ϕ
&
&
moment bezwładno
ś
ci tarczy wzgl
ę
dem osi symetrii prostopadłej do
płaszczyzny tarczy,
moment bezwładno
ś
ci elementu wzgl
ę
dem tej samej osi,
ę
dem tej samej osi, sił oddziaływuj
ą
cych na tar
enia równowagi,
t obrotu tarczy.
ś
li
ć
zale
ż
no
ś
ci
ą
:
(
)
ψ
tg
r
m
m
g
M
e
t
+
=
linki od osi tarczy,
ψ
- k
ą
t wychylenia linki.
<10°) mo
ż
na przyj
ąć
,
ż
e
ψ
ψ
≈
tg
. Wówczas zale
na zapisa
ć
nast
ę
puj
ą
c
ą
zale
ż
no
ść
:
ϕ
ψ
l
r
=
ψ
ϕ
τ
l
r
≈
=
(
)
ψ
r
m
m
g
M
e
t
+
≈
Rys.1. Schemat układu dla metody trójpunktowego podwieszenia
Równanie dynamiczne ruchu
czy i badanego elementu, ma posta
ć
:
(1)
prostopadłej do
dem tej samej osi,
cych na tarcz
ę
wychylon
ą
(2)
. Wówczas zale
ż
no
ść
(2)
(3)
(4)
Uwzgl
ę
dniaj
ą
c zale
ż
no
ś
ci (1), (2), (4) , otrzymamy ostateczn
ą
posta
ć
równania ruchu
układu :
(
)
(
)
0
2
=
+
+
+
ϕ
ϕ
l
J
J
r
m
m
g
e
t
e
t
&
&
(5)
Tak wi
ę
c, cz
ę
sto
ść
drga
ń
własnych układu wynosi:
(
)
(
)
l
J
J
r
m
m
g
e
t
e
t
+
+
=
2
ω
.
(6)
Poniewa
ż
okres waha
ń
układu wynosi:
ω
π
2
=
T
,
(7)
st
ą
d okres waha
ń
układu tarczy i elementu na niej spoczywaj
ą
cej wynosi:
(
)
(
)
e
t
e
t
m
m
g
l
J
J
r
T
+
+
=
π
2
(8)
Gdy na linkach wisi tylko tarcza, to okres waha
ń
wynosi:
t
t
t
gm
l
J
r
T
π
2
=
(9)
Znaj
ą
c okres drga
ń
T i okres drga
ń
T
t
mo
ż
na wyznaczy
ć
z zale
ż
no
ś
ci (8) i (9)
moment bezwładno
ś
ci tarczy J
t
i moment bezwładno
ś
ci J
e
:
l
T
gr
m
J
t
t
t
2
2
2
4
π
=
]
[
2
m
kg
⋅
(10a)
(
)
t
e
t
e
J
l
m
m
T
gr
J
−
+
=
2
2
2
4
π
]
[
2
m
kg
⋅
(10b)
Oszacowanie niepewno
ś
ci pomiarowej
Załó
ż
my dalej,
ż
e niepewno
ś
ci poszczególnych pomiarów s
ą
niezale
ż
ne i losowe.
Ogólna zale
ż
no
ść
okre
ś
laj
ą
ca jak si
ę
przenosz
ą
bł
ę
dy wielko
ś
ci mierzonych na
wyznaczan
ą
po
ś
rednio wielko
ść
, przy zało
ż
eniu niezale
ż
no
ś
ci bł
ę
dów wielko
ś
ci
mierzonych, przedstawia si
ę
nast
ę
puj
ą
co
1
:
2
2
...
∆
∂
∂
+
+
∆
∂
∂
=
∆
z
z
y
x
x
y
y
(11)
gdzie y(x,..z) jest wielko
ś
ci
ą
wyznaczan
ą
metod
ą
po
ś
redni
ą
na podstawie pomiaru
warto
ś
ci x,...z.
Niepewno
ść
wyznaczenia J
t
metod
ą
po
ś
redni
ą
mo
ż
na oszacowa
ć
jako:
2
2
2
2
2
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
=
∆
l
l
J
T
T
J
r
r
J
g
g
J
m
m
J
J
t
t
t
t
t
t
t
t
t
t
(12)
gdzie:
l
T
r
g
m
t
t
∆
∆
∆
∆
∆
,
,
,
,
s
ą
niepewno
ś
ciami pomiarowymi wielko
ś
ci mierzonych
bezpo
ś
rednio: masy tarczy, przyspieszenia ziemskiego, odległo
ś
ci zaczepienia linki
do
ś
rodka tarczy, okresu waha
ń
tarczy, długo
ś
ci linki.
Ostatecznie mo
ż
na zapisa
ć
,
ż
e niepewno
ść
oszacowania momentu bezładno
ś
ci
tarczy wynosi:
(
) (
)
(
)
(
)
∆
+
∆
+
∆
+
∆
+
∆
=
∆
2
2
2
2
2
2
2
2
2
2
4
l
l
grT
m
T
gr
m
r
gT
m
g
rT
m
m
grT
l
rT
J
t
t
t
t
t
t
t
t
t
t
t
t
π
]
[
2
m
kg
⋅
(13)
Podobnie oszacowanie niepewno
ś
ci wyznaczonego momentu bezwładno
ś
ci
elementu mo
ż
na oszacowa
ć
jako:
(
) (
) (
) (
)
2
2
2
2
2
2
2
2
2
2
2
2
4
t
e
J
l
l
MgrT
T
Mgr
r
MgT
g
MrT
M
grT
l
rT
J
∆
+
∆
+
∆
+
∆
+
∆
+
∆
=
∆
π
]
[
2
m
kg
⋅
(14)
gdzie:
e
t
m
m
M
+
=
, oraz przyj
ę
to
t
e
m
m
M
∆
=
∆
=
∆
1
Aby poszerzyć wiedze z tego zakresu sięgnij po książkę: John R. Taylor; Wstęp do analizy błędu pomiarowego;
PWN Warszawa 1999 i późniejsze wydania (rozdział 3).
Przebieg ćwiczenia
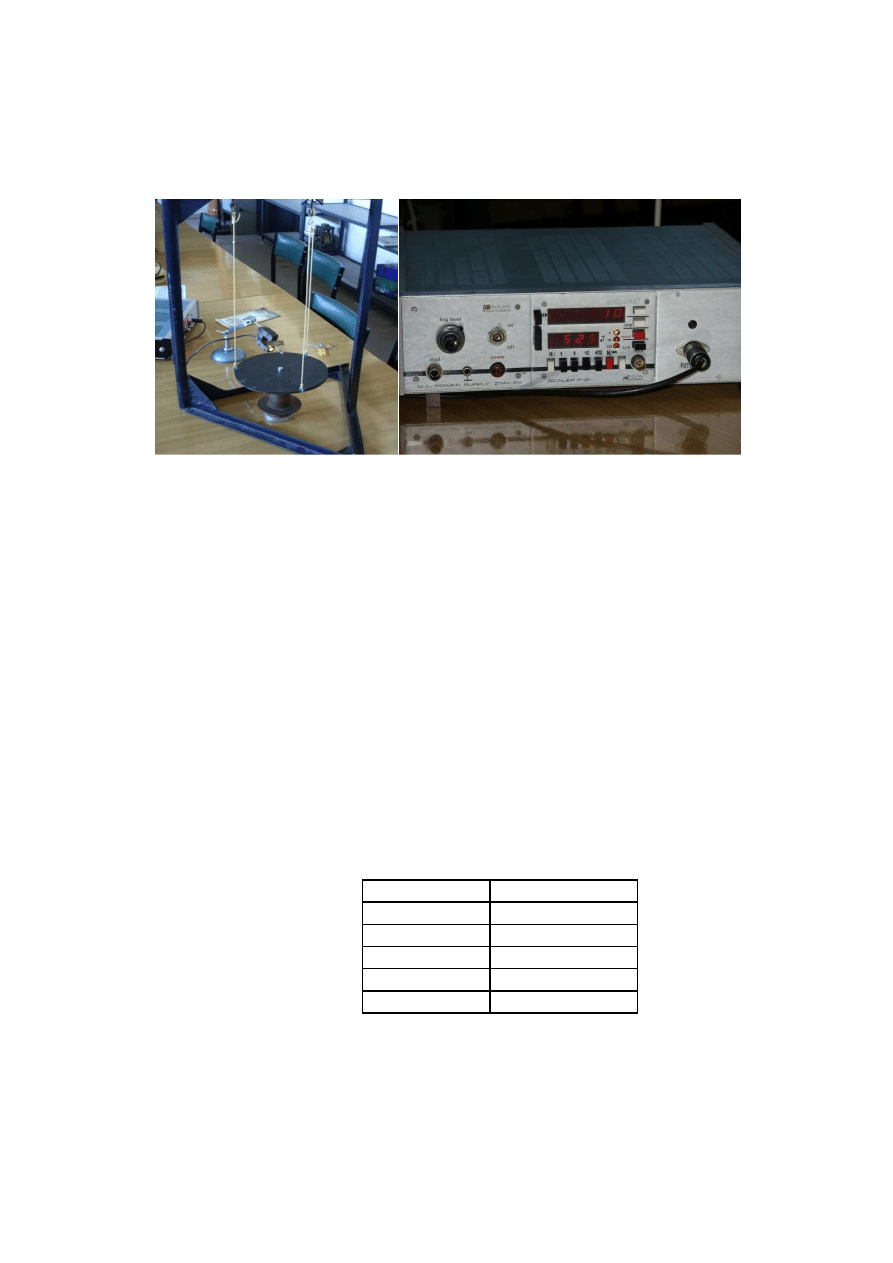
Zdj
ę
cie stanowiska przedstawiono na rysunku 2.
Rys. 2. Stanowisko do bada
ń
momentu bezwładno
ś
ci, oraz przyrz
ą
d do pomiaru
czasu 10 wahni
ęć
tarczy
Opis kolejnych kroków, które nale
ż
y wykona
ć
, znajduje si
ę
w arkuszu sprawozdania.
Poni
ż
ej zwrócono uwag
ę
na pewne istotne zagadnienia.
•
Przy pomiarze czasu 10 –ciu wahni
ęć
samej tarczy jak i układu tarcza-element
nale
ż
y uwa
ż
a
ć
, aby maksymalny k
ą
t odchylenia tarczy nie przekraczał 10
o
.
•
Element nale
ż
y umie
ś
ci
ć
na tarczy w ten sposób, aby o
ś
, wzgl
ę
dem której ma
by
ć
wyznaczony moment bezwładno
ś
ci, pokrywała si
ę
z osi
ą
obrotu tarczy
•
Poniewa
ż
długo
ś
ci linek mog
ą
nie by
ć
identyczne, podobnie jak odległo
ś
ci ich
zamocowania od osi tarczy, nale
ż
y odpowiednie warto
ś
ci u
ś
redni
ć
z pomiarów
wykonanych dla wszystkich trzech linek.
•
Przy analitycznych obliczeniach momentu bezwładno
ś
ci elementu mo
ż
na
skorzysta
ć
z zestawienia g
ę
sto
ś
ci materiałów zamieszczonego poni
ż
ej.
•
We wnioskach nale
ż
y si
ę
ustosunkowa
ć
do otrzymanych pomiarów, a w
szczególno
ś
ci ró
ż
nic pomi
ę
dzy otrzymanymi warto
ś
ciami uzyskanymi z
oblicze
ń
analitycznych oraz z eksperymentu. Przy porównaniu wyników nale
ż
y
uwzgl
ę
dni
ć
otrzymane oszacowanie niepewno
ś
ci pomiarowej.
Materiał
G
ę
sto
ść
[kg/m
3
]
Mosi
ą
dz
8500
Stal
7800
Bakelit
1100 - 1600
Ebonit
1400 - 1800
Duraluminium
2750
Wyszukiwarka
Podobne podstrony:
cw2 inst
CW2 INST v2014 id 123147 Nieznany
CW2 INST 2
CW2 INST
Farmakologia cw2 s
cw2
cw2 3
cw2 7
Instr monma ćw2
cw2 tip 2012 13
2012 cw2 katy Mid 27683
CW3 INST
więcej podobnych podstron