wer. 2014 MT
1
LABORATORIUM MECHANIKI EKSPERYMENTALNEJ
Instrukcja do ćwiczenia
2
Wyznaczanie momentów bezwładności elementów
maszyn metodą podwieszenia trójpunktowego
Cel
ć
wiczenia
Celem
ć
wiczenia jest zapoznanie z eksperymentalnymi metodami wyznaczania
momentów bezwładno
ś
ci cz
ęś
ci maszyn oraz porównanie ich z metodami
analitycznymi. W ramach realizowanego
ć
wiczenia, wykorzystuje si
ę
metod
ę
podwieszenia trójpunktowego.
Literatura
1. J.Leyko, Mechanika Ogólna, tom II.
2. K.Zarankiewicz, Mechanika Teoretyczna, tom III, rozdz. X.
Zagadnienia kontrolne
1. Definicje masowych momentów bezwładno
ś
ci bryły sztywnej i układu punktów
materialnych:
a) wzgl
ę
dem płaszczyzny,
b) wzgl
ę
dem osi,
c) wzgl
ę
dem punktu.
2. Zale
ż
no
ś
ci pomi
ę
dzy momentami bezwładno
ś
ci w prostok
ą
tnym układzie
współrz
ę
dnych (np. momentem biegunowym a momentami wzgl
ę
dem trzech
prostopadłych osi).
3. Moment dewiacyjny dla układu punktów materialnych i bryły sztywnej
4. Twierdzenie Steinera dla osi równoległych i umiej
ę
tno
ść
jego stosowania przy
wyznaczaniu momentu bezwładno
ś
ci
5. Masowe momenty bezwładno
ś
ci wzgl
ę
dem osi: walca, pr
ę
ta, prostopadło
ś
cianu,
płyty prostok
ą
tnej, tarczy kołowej, pier
ś
cienia – wzory i umiej
ę
tno
ść
stosowania
6. Promie
ń
bezwładno
ś
ci i masa zredukowana dla momentów bezwładno
ś
ci
7. Główne i główne centralne osie bezwładno
ś
ci
8. Dynamiczne równanie ruchu obrotowego bryły sztywnej
9. Zale
ż
no
ść
pomi
ę
dzy cz
ę
sto
ś
ci
ą
kołow
ą
a okresem
10. Analityczne wyznaczenie momentów bezwładno
ś
ci ciała zło
ż
onego z prostych
elementów
11. Zasadniczy przebieg
ć
wiczenia
Uwaga!
Instrukcja dotyczy podstaw samego
ć
wiczenia. Aby opanowa
ć
powy
ż
sze
zagadnienia nale
ż
y si
ę
gn
ąć
do podanej literatury.
wer. 2014 MT
2
1. Podstawy teoretyczne dotyczące przeprowadzenia eksperymentu
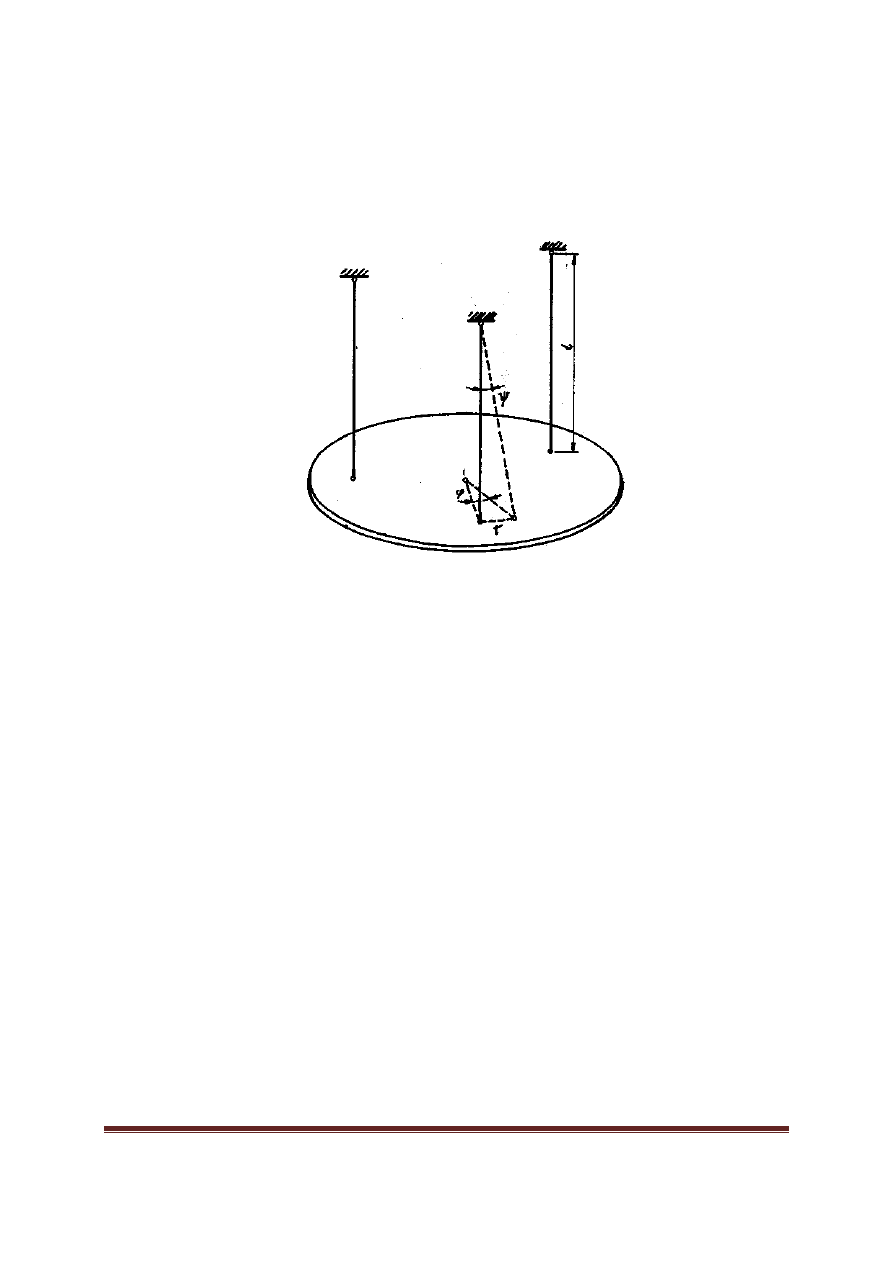
Rozpatrzymy swobodne drgania obrotowe układu, w którym na trzech jed-
nakowych niciach zawieszono kołow
ą
tarcz
ę
o masie m
t
. Układ ten pokazano
schematycznie na rys.1. Tarcza zawsze powinna si
ę
znajdowa
ć
w poło
ż
eniu
poziomym.
Rys.1. Schemat układu dla metody trójpunktowego podwieszenia
Na tarczy kładziemy element o masie m
e
. Równanie dynamiczne ruchu
obrotowego układu, składaj
ą
cego si
ę
z tarczy i badanego elementu, ma posta
ć
:
(
)
0
=
+
+
M
J
J
e
t
ϕ
&
&
(1)
gdzie: J
t
- moment bezwładno
ś
ci tarczy wzgl
ę
dem osi symetrii prostopadłej do
płaszczyzny tarczy,
J
e
- moment bezwładno
ś
ci elementu wzgl
ę
dem tej samej osi,
M - moment, wzgl
ę
dem tej samej osi, sił oddziaływuj
ą
cych na tarcz
ę
wychylon
ą
z poło
ż
enia równowagi,
ϕ
- k
ą
t obrotu tarczy.
Moment sił M mo
ż
na okre
ś
li
ć
zale
ż
no
ś
ci
ą
:
(
)
ψ
tg
r
m
m
g
M
e
t
+
=
(2)
gdzie: r - odległo
ść
linki od osi tarczy,
ψ
- k
ą
t wychylenia linki.
Dla małych k
ą
tów (
ψ
<10°) mo
ż
na przyj
ąć
,
ż
e
ψ
ψ
≈
tg
. Wówczas zale
ż
no
ść
(2)
przyjmie posta
ć
:
(3)
(
)
ψ
r
m
m
g
M
e
t
+
≈
wer. 2014 MT
3
Dla małych k
ą
tów mo
ż
na zapisa
ć
nast
ę
puj
ą
c
ą
zale
ż
no
ść
:
(4)
gdzie l – długo
ść
linki.
Uwzgl
ę
dniaj
ą
c zale
ż
no
ś
ci (1), (2), (4) , otrzymamy ostateczn
ą
posta
ć
równania ruchu
układu :
(
)
(
)
0
2
=
+
+
+
ϕ
ϕ
l
J
J
r
m
m
g
e
t
e
t
&
&
(5)
Tak wi
ę
c, cz
ę
sto
ść
drga
ń
własnych układu wynosi:
(
)
(
)
l
J
J
r
m
m
g
e
t
e
t
+
+
=
2
ω
.
(6)
Poniewa
ż
okres waha
ń
układu wynosi:
ω
π
2
=
T
,
(7)
st
ą
d okres waha
ń
układu tarczy i elementu na niej spoczywaj
ą
cej wynosi:
(
)
(
)
e
t
e
t
m
m
g
l
J
J
r
T
+
+
=
π
2
(8)
Gdy na linkach wisi tylko tarcza, to okres waha
ń
wynosi:
t
t
t
gm
l
J
r
T
π
2
=
(9)
Znaj
ą
c okres drga
ń
T i okres drga
ń
T
t
mo
ż
na wyznaczy
ć
z zale
ż
no
ś
ci (8) i (9)
moment bezwładno
ś
ci tarczy J
t
i moment bezwładno
ś
ci J
e
:
l
T
gr
m
J
t
t
t
2
2
2
4
π
=
]
[
2
m
kg
⋅
(10a)
(
)
t
e
t
e
J
l
m
m
T
gr
J
−
+
=
2
2
2
4
π
]
[
2
m
kg
⋅
(10b)
ϕ
ψ
l
r
=
ψ
ϕ
τ
l
r
≈
=
wer. 2014 MT
4
2. Oszacowanie niepewno
ś
ci pomiarowej
Załó
ż
my dalej,
ż
e niepewno
ś
ci poszczególnych pomiarów s
ą
niezale
ż
ne i losowe.
Ogólna zale
ż
no
ść
okre
ś
laj
ą
ca jak si
ę
przenosz
ą
bł
ę
dy wielko
ś
ci mierzonych na
wyznaczan
ą
po
ś
rednio wielko
ść
, przy zało
ż
eniu niezale
ż
no
ś
ci bł
ę
dów wielko
ś
ci
mierzonych, przedstawia si
ę
nast
ę
puj
ą
co
1
:
2
2
...
∆
∂
∂
+
+
∆
∂
∂
=
∆
z
z
y
x
x
y
y
(11)
gdzie y(x,..z) jest wielko
ś
ci
ą
wyznaczan
ą
metod
ą
po
ś
redni
ą
na podstawie pomiaru
warto
ś
ci x,...z.
Niepewno
ść
wyznaczenia J
t
metod
ą
po
ś
redni
ą
mo
ż
na oszacowa
ć
jako:
2
2
2
2
2
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
=
∆
l
l
J
T
T
J
r
r
J
g
g
J
m
m
J
J
t
t
t
t
t
t
t
t
t
t
(12)
gdzie:
l
T
r
g
m
t
t
∆
∆
∆
∆
∆
,
,
,
,
s
ą
niepewno
ś
ciami pomiarowymi wielko
ś
ci mierzonych
bezpo
ś
rednio: masy tarczy, przyspieszenia ziemskiego, odległo
ś
ci zaczepienia linki
do
ś
rodka tarczy, okresu waha
ń
tarczy, długo
ś
ci linki.
Ostatecznie mo
ż
na zapisa
ć
,
ż
e niepewno
ść
oszacowania momentu bezładno
ś
ci
tarczy wynosi:
(
) (
)
(
)
(
)
∆
+
∆
+
∆
+
∆
+
∆
=
∆
2
2
2
2
2
2
2
2
2
2
4
l
l
grT
m
T
gr
m
r
gT
m
g
rT
m
m
grT
l
rT
J
t
t
t
t
t
t
t
t
t
t
t
t
π
]
[
2
m
kg
⋅
(13)
Podobnie oszacowanie niepewno
ś
ci wyznaczonego momentu bezwładno
ś
ci
elementu mo
ż
na oszacowa
ć
jako:
(
) (
) (
) (
)
2
2
2
2
2
2
2
2
2
2
2
2
4
t
e
J
l
l
MgrT
T
Mgr
r
MgT
g
MrT
M
grT
l
rT
J
∆
+
∆
+
∆
+
∆
+
∆
+
∆
=
∆
π
]
[
2
m
kg
⋅
(14)
gdzie:
e
t
m
m
M
+
=
, oraz przyj
ę
to
t
e
m
m
M
∆
=
∆
=
∆
1
Aby poszerzyć wiedze z tego zakresu sięgnij po książkę: John R. Taylor; Wstęp do analizy błędu pomiarowego;
PWN Warszawa 1999 i późniejsze wydania (rozdział 3).

wer. 2014 MT
5
3. Przebieg ćwiczenia
Zdj
ę
cie stanowiska przedstawiono na rysunku 2. Na stanowisku znajduje si
ę
przyrz
ą
d, który mierzy czas i jednocze
ś
nie zlicza 10 odsłoni
ęć
fotoelementu. Po
zliczeniu 10 okresów pomiar czasu automatycznie zatrzymuje si
ę
. Nale
ż
y zadba
ć
o
to aby fotoelement był odsłaniany jednokrotnie na okres ruchu tarczy. Do
przysłaniania fotoelementu słu
ż
y mała blaszka mocowana do tarczy.
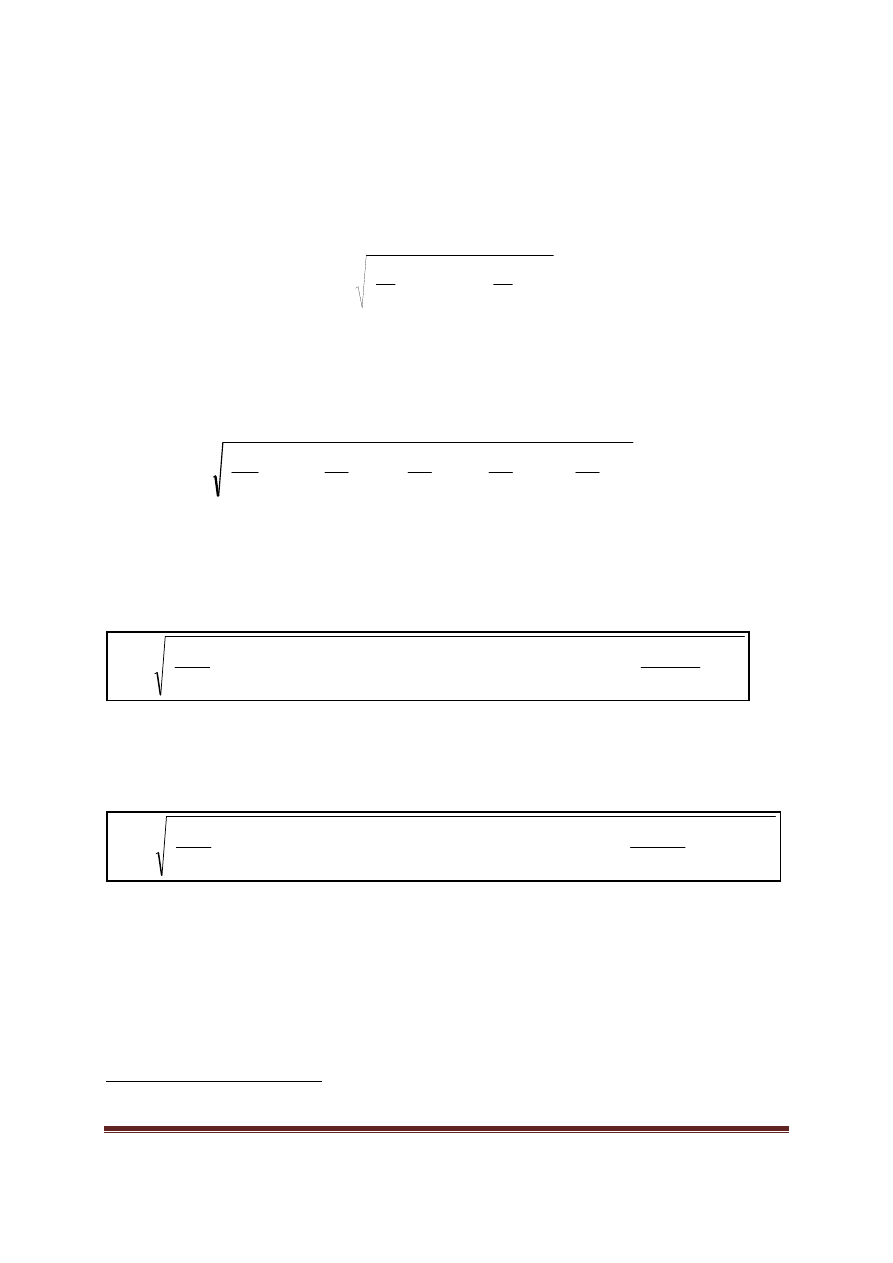
Rys. 2. Stanowisko do bada
ń
momentu bezwładno
ś
ci, oraz przyrz
ą
d do pomiaru
czasu 10 wahni
ęć
tarczy
1
2
3
4
5
6
7
8
Rys.3. Warianty
ć
wiczenia
Opis kolejnych kroków, które nale
ż
y wykona
ć
, znajduje si
ę
w arkuszu sprawozdania.
Poni
ż
ej zwrócono uwag
ę
na pewne istotne zagadnienia.
1.
Ć
wiczenie mo
ż
na wykona
ć
w ró
ż
nych wariantach wyznaczaj
ą
c momenty
bezwładno
ś
ci ró
ż
nych elementów. Wariant
ć
wiczenia narzuca prowadz
ą
cy.
W poni
ż
szej tabeli przedstawiono poszczególne warianty
ć
wiczenia. Nie
zapomnij wpisa
ć
nr wariantu do arkusza sprawozdania.
2. Przy pomiarze czasu 10 –ciu wahni
ęć
samej tarczy jak i układu tarcza-element
nale
ż
y uwa
ż
a
ć
, aby maksymalny k
ą
t odchylenia tarczy nie przekraczał kilku
stopni.
3. Element nale
ż
y umie
ś
ci
ć
na tarczy w ten sposób, aby o
ś
, wzgl
ę
dem której ma
by
ć
wyznaczony moment bezwładno
ś
ci, pokrywała si
ę
z osi
ą
obrotu tarczy.

wer. 2014 MT
6
4. Zadbaj o to aby otwory w tarczy i ruchomej podstawce (pod tarcz
ą
) były
osiowe, inaczej tarcza nie b
ę
dzie obraca
ć
si
ę
swobodnie.
5. Poniewa
ż
długo
ś
ci linek mog
ą
nie by
ć
identyczne, podobnie jak odległo
ś
ci ich
zamocowania od osi tarczy, nale
ż
y odpowiednie warto
ś
ci u
ś
redni
ć
z pomiarów
wykonanych dla wszystkich trzech linek.
6. Przy analitycznych obliczeniach momentu bezwładno
ś
ci elementu skorzystaj z
pomiaru masy, wylicz przybli
ż
on
ą
obj
ę
to
ść
i nast
ę
pnie g
ę
sto
ść
materiału. W
przypadku elementów wykonanych z kilku ró
ż
nych materiałów (płytka 2 ze
zdj
ęć
powy
ż
ej) przyjmij tablicow
ą
g
ę
sto
ść
mosi
ą
dzu (tulejki) a g
ę
sto
ść
materiału samej płytki wylicz na podstawie okre
ś
lonej do
ś
wiadczalnie masy
odejmuj
ą
c mas
ę
tulejek.
7. Aby ułatwi
ć
sobie zadanie przy obliczeniach analitycznych mo
ż
esz do
pewnego stopnia upraszcza
ć
kształty elementów zast
ę
puj
ą
c je zło
ż
eniem
okre
ś
lonych brył.
8. Obliczenia przeprowad
ź
w sposób weryfikowalny tzn. wyja
ś
nij poszczególne
kroki (nazwij konkretnie to co w danym momencie obliczasz), przedstaw wzór,
podstawienie i wynik.
9. We wnioskach nale
ż
y si
ę
ustosunkowa
ć
do otrzymanych pomiarów, a w
szczególno
ś
ci ró
ż
nic pomi
ę
dzy otrzymanymi warto
ś
ciami uzyskanymi z
oblicze
ń
analitycznych oraz z eksperymentu. Przy porównaniu wyników nale
ż
y
uwzgl
ę
dni
ć
otrzymane oszacowanie niepewno
ś
ci pomiarowej. Dodatkowo
przeanalizuj jaki bł
ą
d wprowadzasz nie uwzgl
ę
dniaj
ą
c momentu bezwładno
ś
ci
małej płytki mocowanej do tarczy, słu
żą
cej do zasłonienia fotoelementu.
Wyszukiwarka
Podobne podstrony:
cw2 IPw slajdy id 123148 Nieznany
cw2 MiASC AiR id 123156 Nieznany
cw2 st dys 2 id 123175 Nieznany
M INST inf s id 274726 Nieznany
cw2 st dys id 123174 Nieznany
cw2 IPw zadania id 123150 Nieznany
Cw2 t id 123178 Nieznany
LA cw2 id 257339 Nieznany
CHPN cw2 id 115943 Nieznany
cw2 2 id 123047 Nieznany
cw2 11 id 123042 Nieznany
Program cw2 id 395617 Nieznany
CW6 wariant2 INST id 123696 Nieznany
EKONOMIA CW2 id 155753 Nieznany
cw2 id 121601 Nieznany
cw2 id 537975 Nieznany
ISI CW2 c1 id 220434 Nieznany
więcej podobnych podstron