OBLICZENIA W POZIOMEJ
OSNOWIE POMIAROWEJ
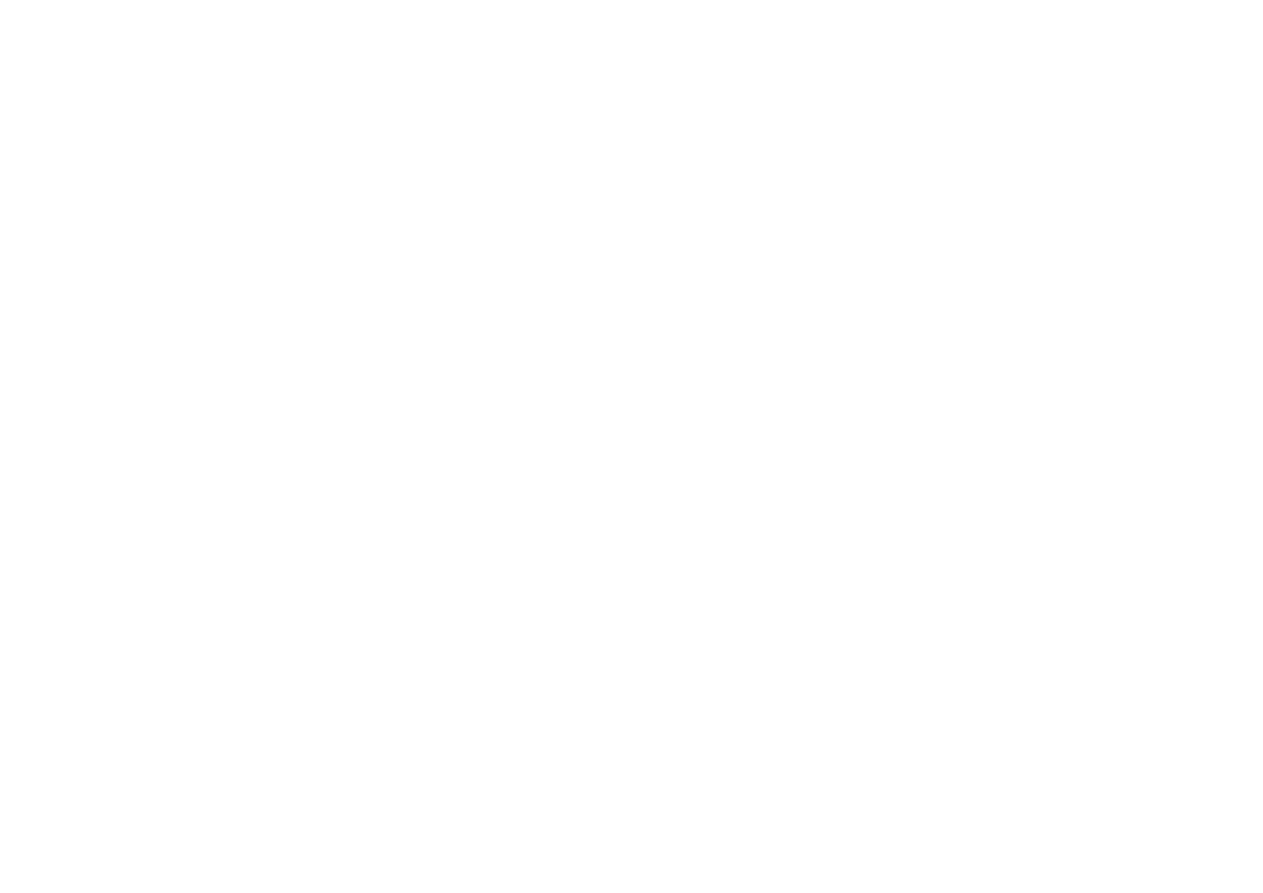
OBLICZENIE AZYMUTU I DŁUGOŚCI BOKU ZE WSPÓŁRZĘDNYCH
Azymut jest to kąt zawarty pomiędzy kierunkiem północy, a wyznaczanym kierunkiem linii, liczony
zgodnie z ruchem wskazówek zegara. W zależności od sposobu zdefiniowania kierunku północnego
wyróżnia się
azymut: geograficzny astronomiczny, geograficzny geodezyjny, magnetyczny,
topograficzny (kartograficzny).
+X
X
K
X
P
Y
P
Y
K
P
PK
ϕ
K
A
KP
+Y
A
PK
- Y-
∆
−∆
X
-
X’
PK
PK
PK
∆
X
∆
Y
tg
=
ϕ
PK
PK
PK
X
Y
arctg
∆
∆
=
ϕ
P
K
PK
Y
Y
Y
−
=
∆
P
K
PK
X
X
X
−
=
∆
Kąt
ϕ
nazywany jest czwartakiem.
Czwartak jest to kąt ostry zawarty pomiędzy
najbliższym kierunkiem osi x
’
równoległej do osi x i
przechodzącej przez punkt P
ϕ
K
IV
I
II
K
K
K
A
PK
A
PK
A
PK
+y’
+x’
ϕ
ϕ
ϕ
A
PK
P
2
PK
2
PK
Y
X
d
∆
+
∆
=
M
L
Y
X
Y
X
tg
PK
PK
PK
PK
∆
∆
=
∆
−
∆
∆
+
∆
=
ψ
M
L
tg
arc
∆
∆
=
ψ
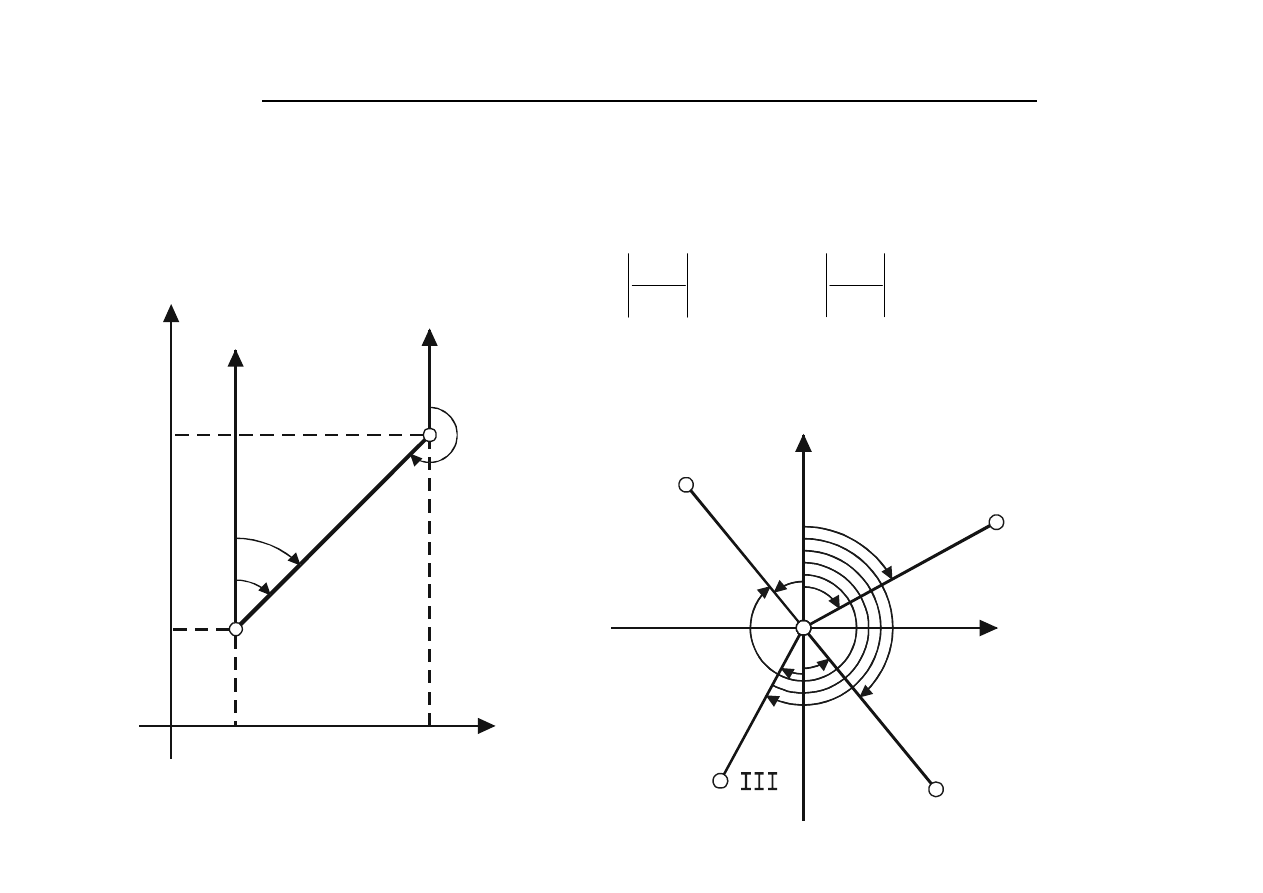
gdzie
można nazwać pseudoczwartakiem, na podstawie
którego obliczmy pseudoazymut A
’
. Wybór wzoru do
wyznaczenia A
’
dokonywany jest w oparciu o tabelę na
podstawie znaku licznika
∆
L i mianownika
∆
M. Kontrolę
stanowi równość:
A
’
= A + 45
0
ψ
Kontrolę obliczenia azymutu odcinka PK
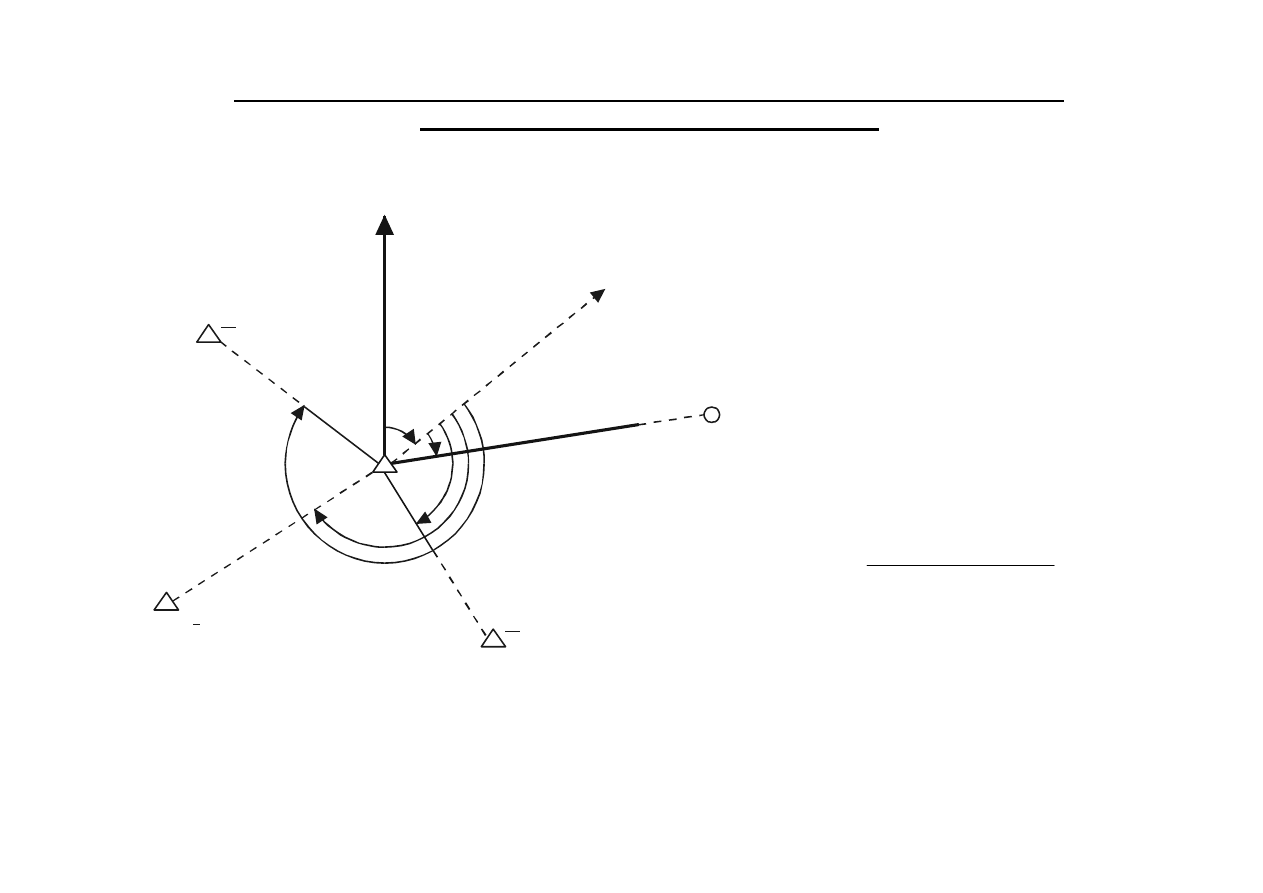
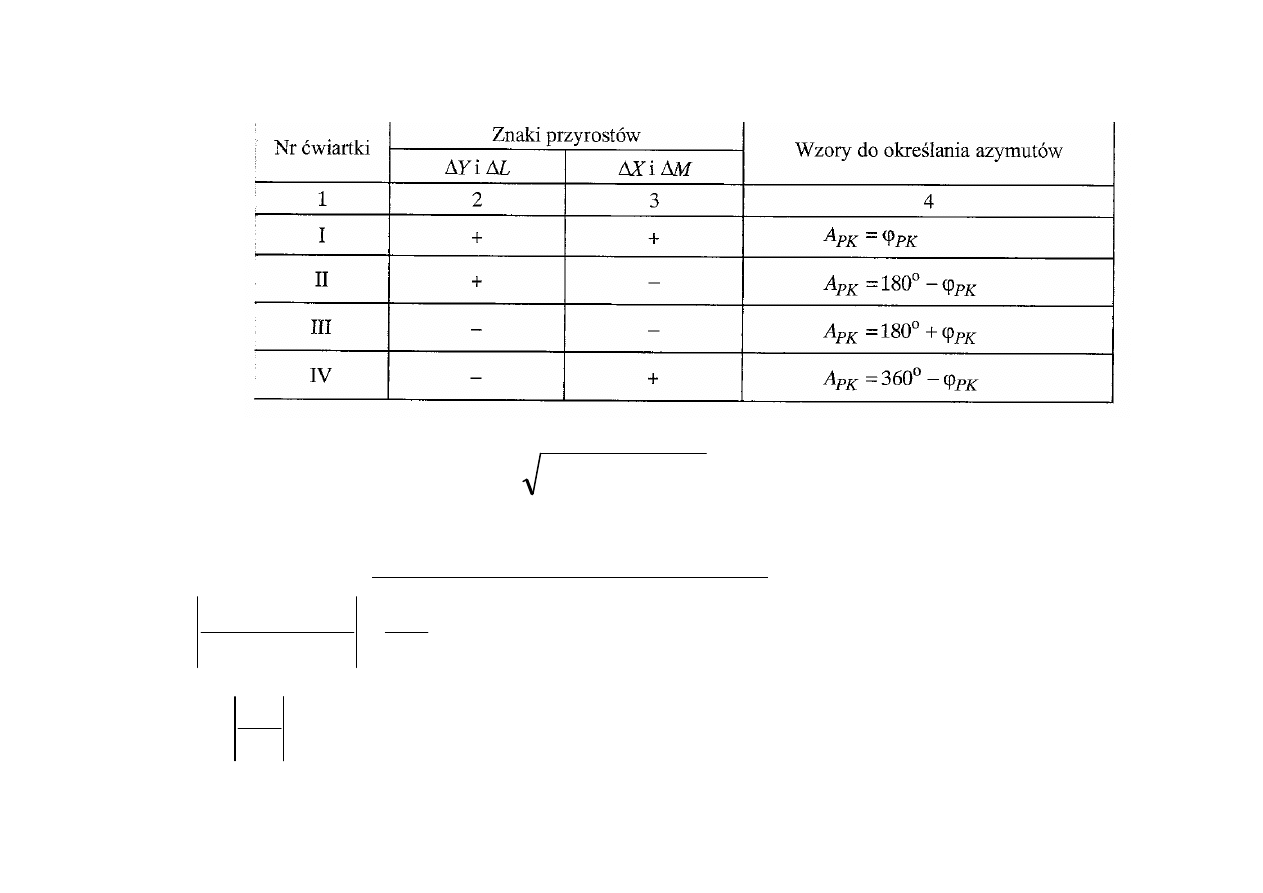
WYZNACZENIE STAŁEJ ORIENTUJĄCEJ PRZY WIELOKIERUNKOWYM
NAWIĄZANIU DO PUNKTÓW STAŁYCH
ϕ
X
s
k
1
k
P
k
i
k
n
P
1 (y
1,
x )
1
i (y
i,
x )
i
n (y
n,
x )
n
O
0
A
SP
=
ϕ
+ k
p
gdzie:
ϕ
- stała orientująca pęku kierunków,
k
p
– kierunek wyznaczany, odniesiony
do kreski 0
0
limbusa.
ϕ
1
= A
S1
– k
1
ϕ
2
= A
S2
– k
2
. . . . . . . . . . .
ϕ
n
= A
Sn
– k
n
n
.
.
.
n
2
1
ϕ
+
+
ϕ
+
ϕ
=
ϕ
α
1
α
2
α
3
α
n
−2
α
n
−1
d
n
−2
α
n
d
1
d
2
d
n
−1
A
0
1
2
3
n-2
n-1
n+1
A
n
n
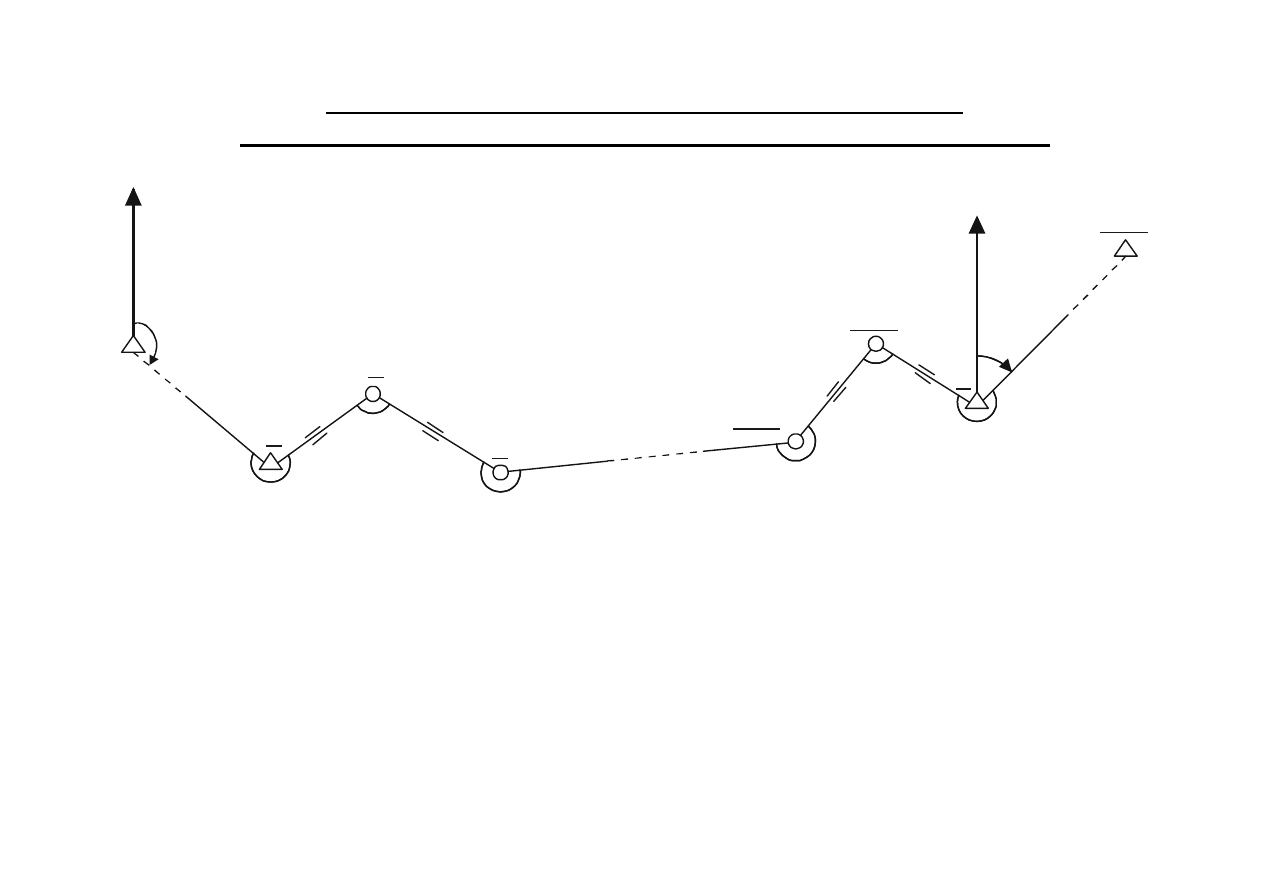
Obliczenie i wyrównanie sposobem przybliżonym ciągu
poligonowego sytuacyjnego obustronnie dowiązanego kątowo i liniowo
1
A
d
1
2
3
4
n-2
n-1
n
d
2
d
3
d
n-2
d
n-1
d
n
α
1
α
2
α
3
α
4
α
n-2
α
n-1
α
n
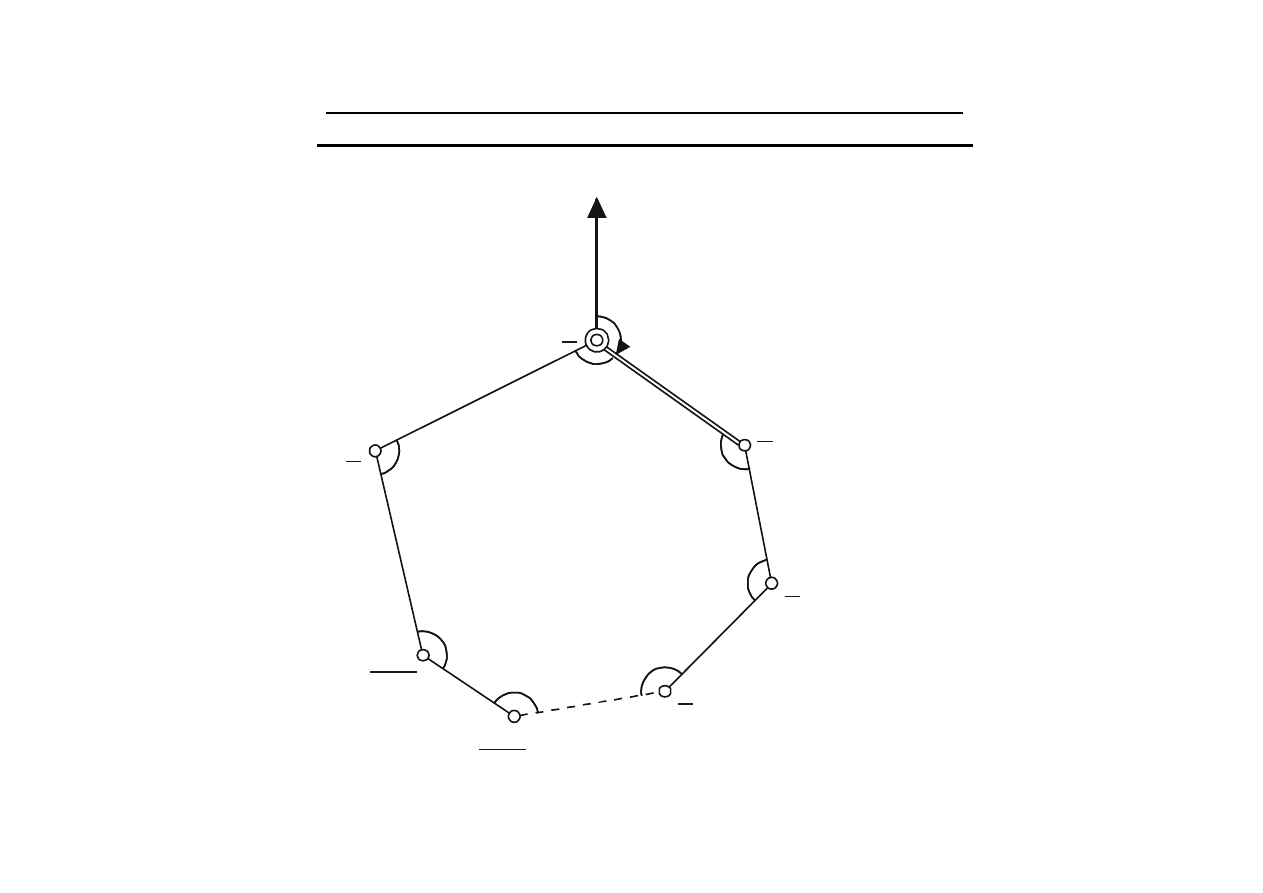
Obliczenie i wyrównanie sposobem przybliżonym ciągu
poligonowego sytuacyjnego zamkniętego nienawiązanego
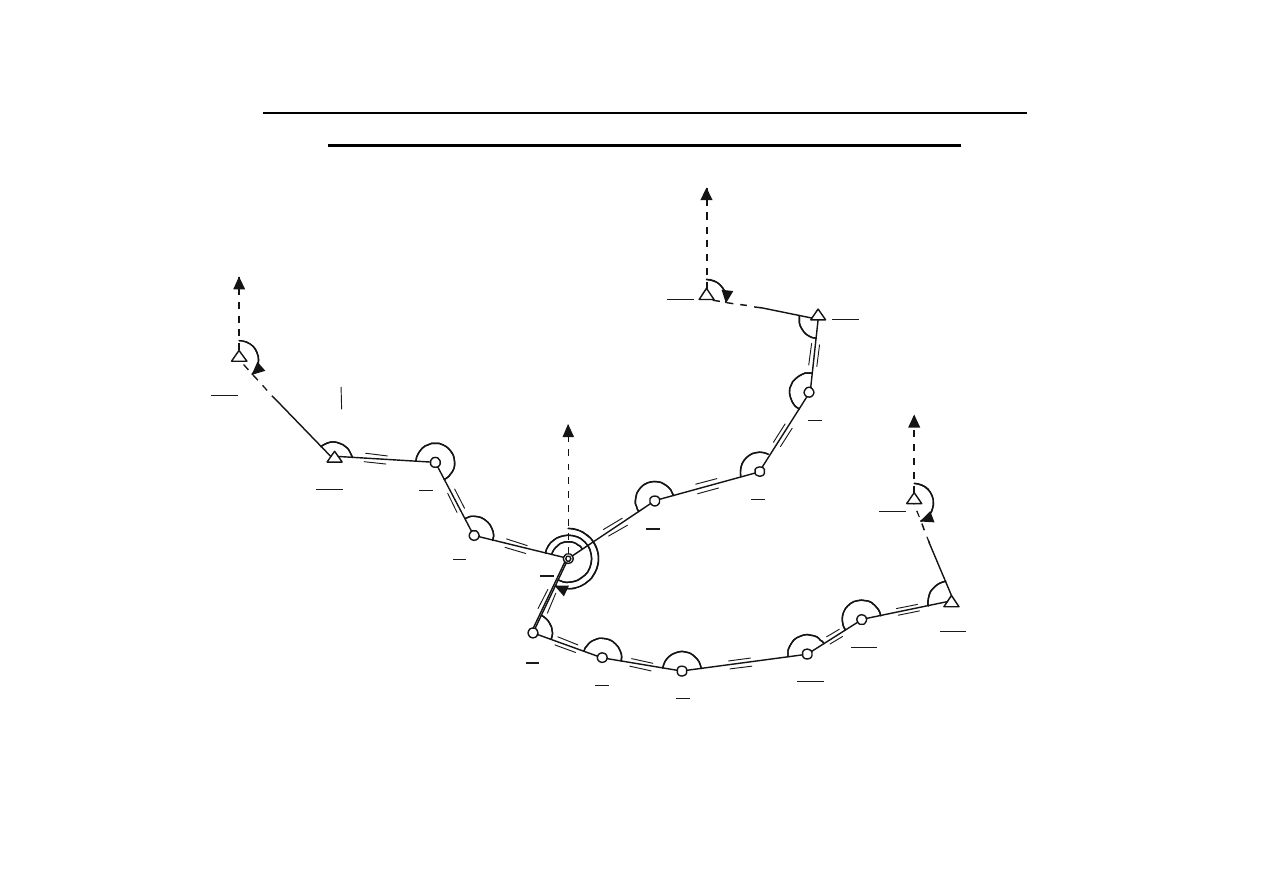
Obliczenie i wyrównanie sposobem przybliżonym sytuacyjnej sieci
poligonowej nawiązanej z jednym punktem węzłowym
27
26
1
2
3
7
8
9
10
11
55
54
4
5
6
48
49
A
01
A
02
A
03
A
w
I
II
III

Wyszukiwarka
Podobne podstrony:
obliczenie średniego błędu pomiaru kąta w poligonizacji kopalnianej
F2- Obliczenia i rachunek niepewności pomiarowej, Szkoła, Fizyka 02
Matura 16 matematyka poziom rozszerzony odpowiedzi
ćw OBLICZANIE WSPÓŁRZĘDNYCH PUNKTÓW POMIAROWEJ OSNOWY SYTUACYJNEJ I SZCZEGÓŁÓW TERENOWYCH
Procesy obliczenia do 10 pomiaru1, Technologia chemiczna, 5 semestr, Podstawowe procesy przemysłu ch
pozioma osnowa pomiarowa, Geodezja ogólna(1)
Opis techniczny i obliczenia poziomo
proj OBLICZANIE WSPÓŁRZĘDNYCH PUNKTÓW POMIAROWEJ OSNOWY SYTUACYJNEJ I SZCZEGÓŁÓW TERENOWYCHx
16 obliczenia + wnioski, chemia fizyczna laboratorium, 16
Środowisko programowe do obliczenia poziomów energetycznych studni kwantowych typu III V
A4 jedna strona kolor Dane do obliczeń poziomu swobody ruchu
OBLICZENIA DLA TRZECIEGO POMIARU
Matura 16 matematyka poziom podstawowy odpowiedzi
obliczenie średniego błędu pomiaru kąta w poligonizacji kopalnianej
KAT NRGS 11 16 2 elektroda poziomu pl
Przykład obliczeniowy dla pierwszego pomiaru
więcej podobnych podstron