Silnik wykonawczy prądu stałego
13
ĆWICZENIE 2 – SILNIK WYKONAWCZY PRĄDU STAŁEGO
Wprowadzenie
Silnik wykonawczy prądu stałego zasilany od strony twornika, ze wzbudzeniem od
magnesów trwałych, jest jednym z najbardziej popularnych przetworników
elektromechanicznych w układach automatyki i w układach napędowych małej mocy.
Silniki elektryczne o trzech zębach wirnika (Z = 3) są budowane jako maszyny
prądu stałego z komutatorem mechanicznym o trzech działkach (K = 3) bądź z
komutatorem elektronicznym. W zakresie małych mocy maszyny te są zwykle
wzbudzane magnesami trwałymi ferrytowymi. Silniczek prądu stałego z komutatorem
mechanicznym o mocy do około 2 W jest tani w produkcji i bardzo ekonomiczny w
eksploatacji (rys. 2.1). Jego głównymi zaletami są mała masa i wysoka sprawność
(ok. 50%), co predysponuje go do wszelkiego rodzaju napędów bateryjnych. Mała
liczba zębów i działek komutatora powoduje pulsacje napięcia rotacji.
Napięcie rotacji e zawiera składową stałą E
0
i składową zmienną e
~
.
0
~
E
e
e
−
=
(2.1)
W konsekwencji wszystkie parametry pracy silnika zawierają składowe stałe i
składowe zmienne
+
=
+
=
.
,
+
=
~
,
~
,
0
0
0
0
M
M
M
i
+
I
=
i
e
E
e
m
m
m
ω
ω
ω
~
~
(2.2)
Pulsacje występują w momencie elektromagnetycznym, a także w prądzie silnika,
co z kolei powoduje pulsacje prędkości obrotowej.
Pulsacje te, a także parametry elektromechaniczne silnika zależą od:
−
rozkładu pola magnetycznego w szczelinie silnika,
−
dokładności montażu poszczególnych podzespołów silnika.
Silnik wykonawczy prądu stałego
14
Silniki prądu stałego charakteryzują się stosunkowo małą trwałością, którą
determinuje trwałość zestyku ślizgowego szczotek z komutatorem. Zestyk ślizgowy
szczotek z komutatorem powiększa rezystancję silnika R o tzw. rezystancję dynamicz-
ną, na którą mają wpływ drgania szczotek, gładkość powierzchni komutatora i jej zab-
rudzenie, temperatura, wilgotność i prędkość obrotowa. Rezystancja dynamiczna wpły-
wa na stabilność parametrów pracy silnika. W szczególności jest źródłem stochas-
tycznych zmian prędkości obrotowej.
Komutator mechaniczny oprócz niskiej trwałości jest źródłem zakłóceń elektro-
magnetycznych. Natomiast zaletą komutatora mechanicznego jest jego niski koszt w
porównaniu z kosztem innych ekwiwalentnych rozwiązań.
Uzwojenie silnika może być połączone w trójkąt lub gwiazdę.
Silniki z uzwojeniem połączonym w gwiazdę mają większą sprawność. W prakty-
ce częściej jest stosowany układ połączenia uzwojenia w trójkąt. Wynika to stąd, że
uzwojenie połączone w trójkąt ma właściwości tłumiące wszelkiego rodzaju przepię-
cia, które generuje np. niestabilny styk ślizgowy szczotek z komutatorem. Wpływa to
korzystnie na pracę szczotek i kompatybilność elektromagnetyczną, tzn. zmniejsza
zakłócenia radioelektryczne.
4
5
6
1
2
3
4
1,2
1,2
27,5
12,5
φ
3
3
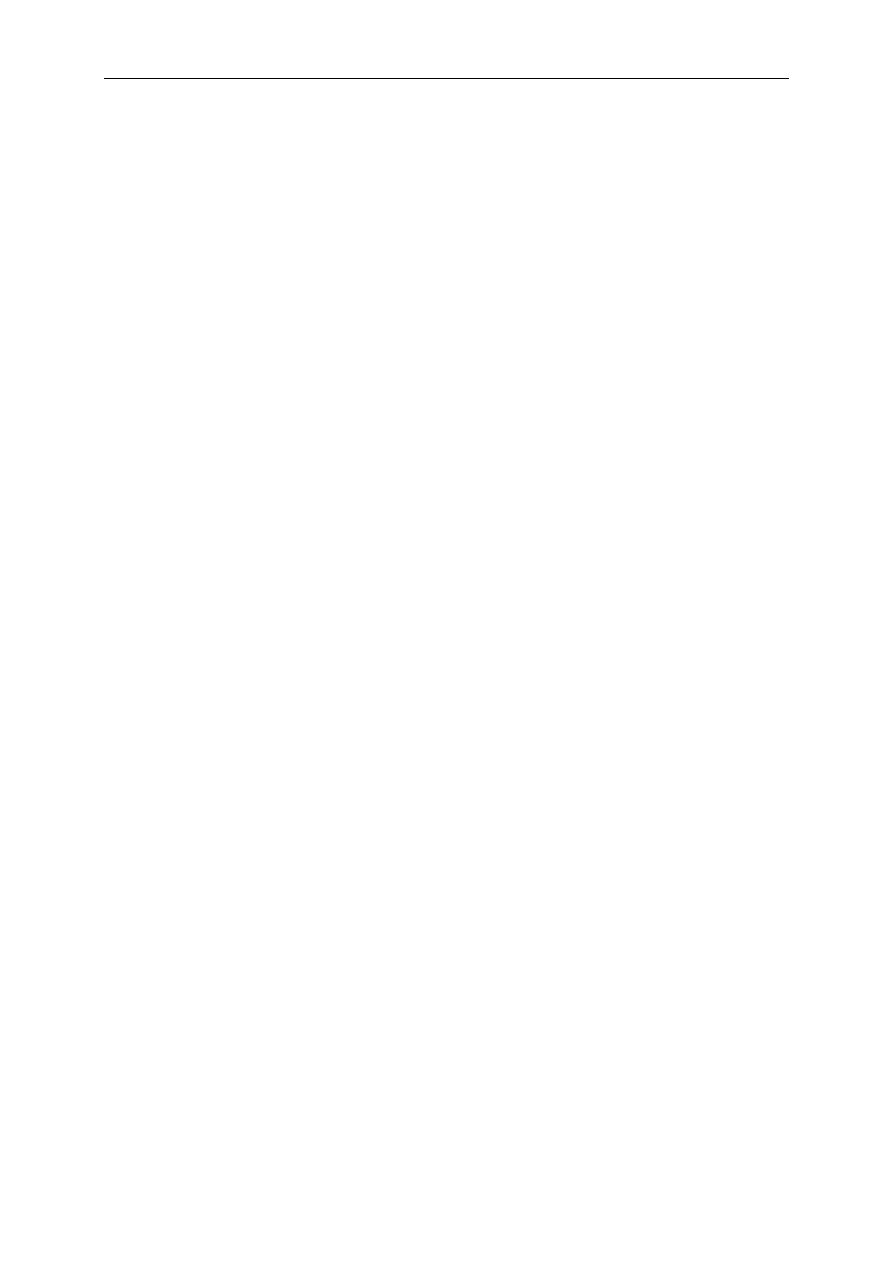
Rys. 2.1. Budowa silnika o trzech działkach komutatora na przykładzie silnika typu PRM33;
P
N
= 0,5 W; U
N
= 4 V; n
N
= 2000 obr/min: 1
−
obudowa, 2
−
magnes trwały, 3
−
żelazo wir-
nika, 4 – uzwojenie połączone w trójkąt, 5
−
komutator, 6
−
elementy przeciwzakłóceniowe
Silnik wykonawczy prądu stałego
15
A1
A2
N
S
i
U
-
+
i
A
A
B
C
o
ś
dz
ia
łk
i "
A
"
ko
m
ut
at
or
a
o
ś
N
-S
w
zb
u
d
ze
n
ia
o
ś s
zc
zo
te
k
A
1
-
A
2
o
ś s
ek
cji
"
A
"
uz
w
oj
e
ń
β
0
ω
ω
ϑ
ϑ
0
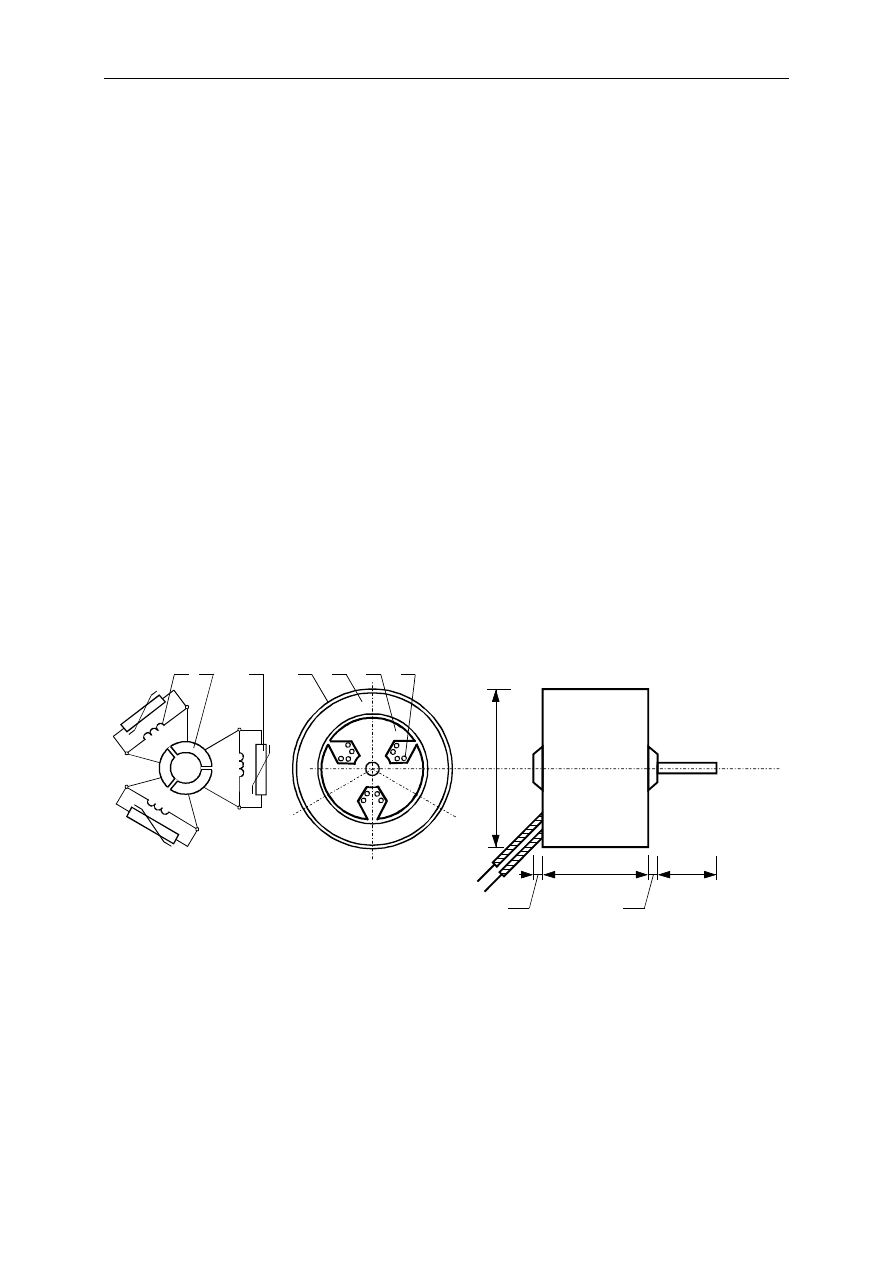
Rys. 2.2. Schemat elektryczny silnika z zaznaczonymi charakterystycznymi osiami i uzwojeniem
połączonym w gwiazdę. Przesunięcia kątowe zgodne ze strzałkami uważane są za dodatnie
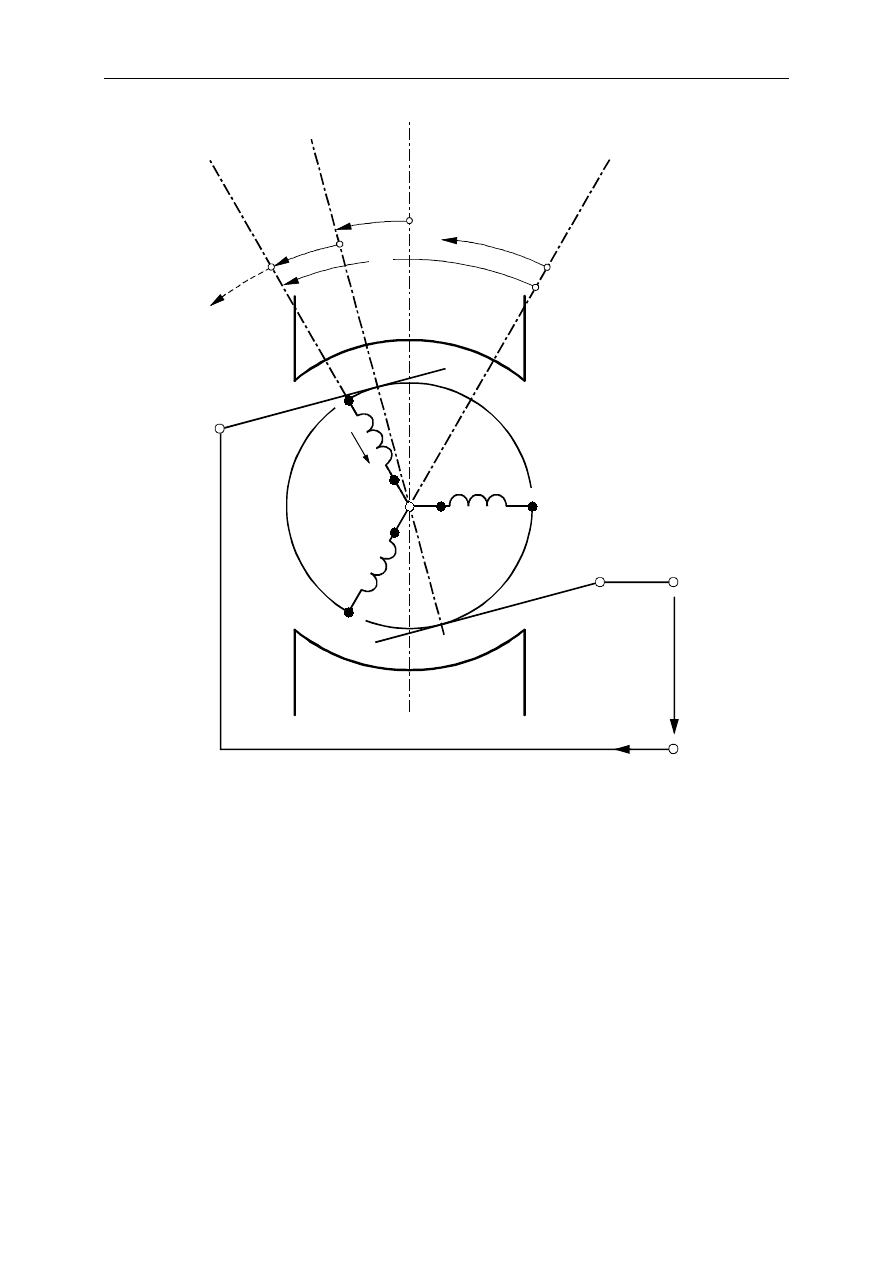
Charakterystyka mechaniczna silnika jest charakterystyką typu bocznikowego
(rys. 2.3).
Silnik wykonawczy prądu stałego
16
M
0
M
M
N
z
mN
m0
m
Rys. 2.3. Charakterystyka mechaniczna mikrosilnika prądu stałego wzbudzanego magnesami trwałymi
przy U = const; M
z
– moment zwarcia,
ω
m0
– prędkość kątowa biegu jałowego
Opis stanowiska laboratoryjnego
Stanowisko laboratoryjne składa się z dwóch identycznych silników sprzęgniętych
razem za pomocą rurki elastycznej, zainstalowanych w rozbieralnej obudowie. Końce
uzwojeń tworników są wyprowadzone. Po rozprzęgnięciu silników, na wale jednego z
nich można zamocować kółko pasowe.
Silnikiem badanym w ćwiczeniu jest silnik wykonawczy prądu stałego typu AS-4
o danych znamionowych:
U
N
= 17 V; P
N
= 1,2W; M
N
= 19,6·10
-4
N·m (20 G·cm); n
N
= 6000 obr/min +15%-10%
(przy M
N
);
obr/min
6400
0
≥
n
;
A
07
,
0
0
≤
I
;
A
25
,
0
N
≤
I
.
Program ćwiczenia
a) Oględziny
Silnik należy rozmontować i obejrzeć stojan z magnesem trwałym, wirnik z
komutatorem oraz tarczę łożyskową ze szczotkami.
b) Wyznaczenie zależności momentu elektromagnetycznego silnika od prądu twornika
M
em
= f(I) przy
ω
m
= 0
Moment elektromagnetyczny silnika wykonawczego opisuje zależność
.
em
I
c
M
Φ
=
Silnik wykonawczy prądu stałego
17
Ponieważ strumień wzbudzenia
Φ
jest stały (pochodzi od magnesów trwałych),
więc moment elektromagnetyczny M
em
zależy tylko od prądu I płynącego w
uzwojeniach wirnika.
Silniki należy rozprzęgnąć i na wale jednego z nich zamontować kółko pasowe.
Pomiary wykonuje się przy zatrzymanym wirniku (
ω
m
= 0), przymocowując do
kółka pasowego dynamometr. Zmieniając napięcie zasilania silnika określa się
zależność między prądem twornika I a siłą F działającą na dynamometr. Iloczyn
wartości siły i długości ramienia, na które ta siła działa, daje wartość momentu
elektromagnetycznego silnika.
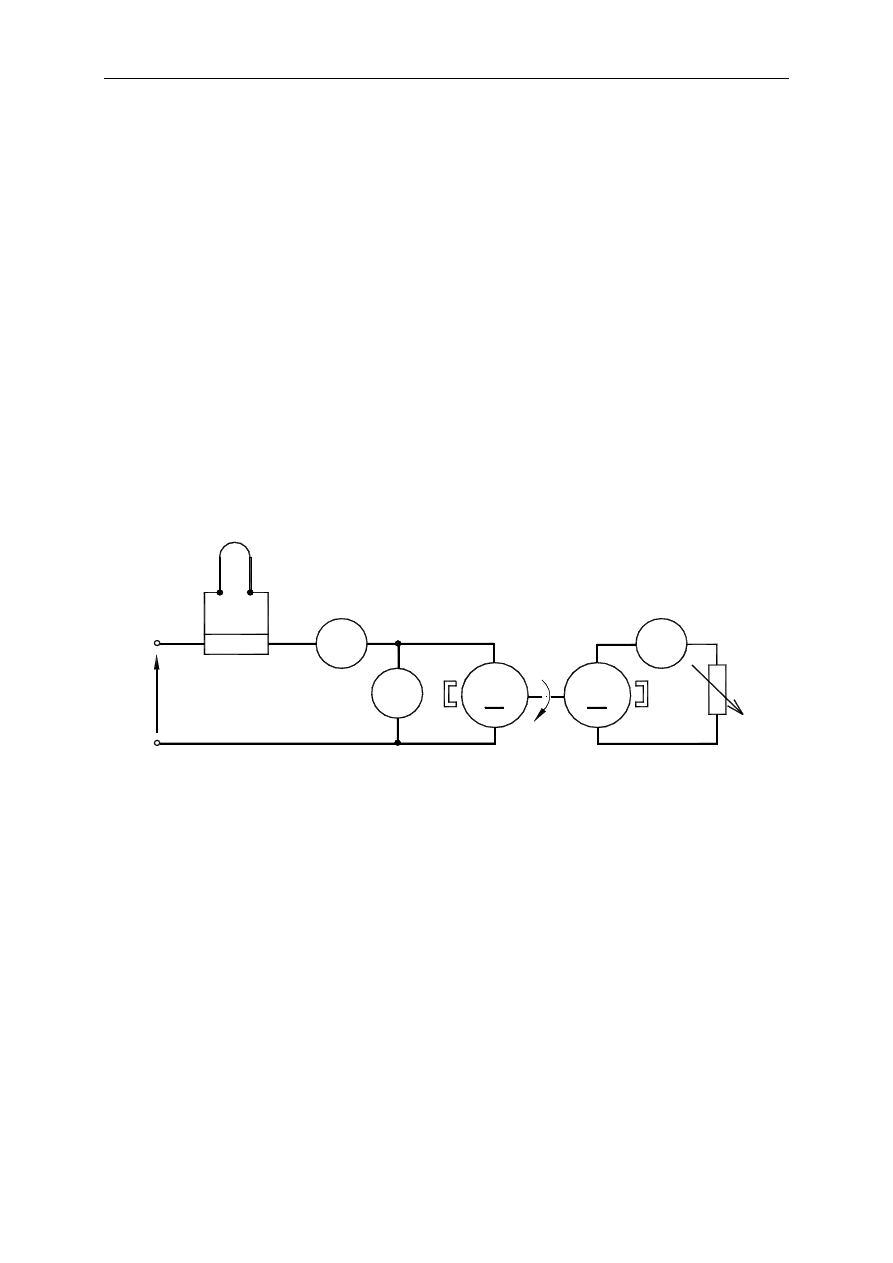
c) Wyznaczenie rodziny charakterystyk zewnętrznych n = f(I), n = f(M
em
)
Pomiary wykonuje się w obwodzie pokazanym na rys. 2.4. Silniki muszą być
sprzęgnięte.
U
R
b
obc
R
n
A
V
M
Osc
A
M
Rys. 2.4. Schemat ideowy obwodu do wyznaczania charakterystyk mechanicznych silnika
Silnik badany zasila się napięciem o stałej wartości z zasilacza prądu stałego.
Obciążenie silnika zmienia się poprzez zmianę rezystancji włączonej w obwód
twornika silnika drugiego, który pracuje jako prądnica. Prędkość silnika można badać
stroboskopem lub też mierząc (na oscyloskopie) częstotliwość komutowania prądu
maszyny zasilanej. Pomiary powtarza się dla kilku różnych wartości napięcia zasilania.
Porównując ze sobą otrzymaną charakterystykę n = f(I) i poprzednio zmierzoną
charakterystykę M
em
= f(I) otrzymuje się charakterystykę mechaniczną silnika
M
em
= f(n).
d) Wyznaczenie elektromagnetycznej stałej czasowej silnika
Silnik wykonawczy prądu stałego
18
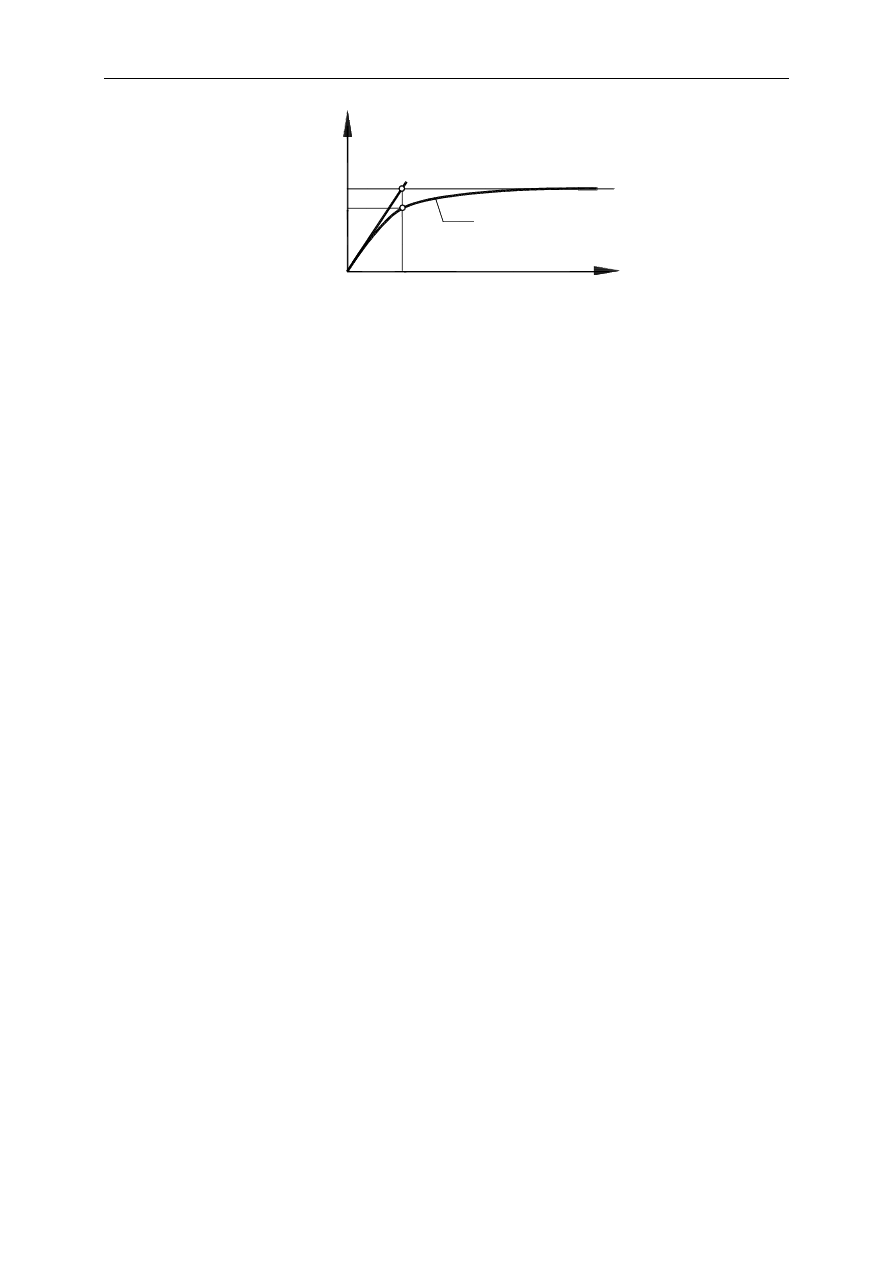
Po załączeniu stałego napięcia na nieruchomy i nieobciążony silnik przebieg
czasowy prądu twornika można w uproszczeniu przedstawić zależnością
jednowykładniczą
)
1
(
)
(
0
T
t
e
I
t
i
−
−
=
,
gdzie:
I
0
– średnia wartość prądu twornika w ustalonym stanie pracy,
T – elektromagnetyczna stała czasowa, zależna od parametrów R, L obwodu
twornika.
Wartość
elektromagnetycznej
stałej
czasowej
determinuje
właściwości
dynamiczne silnika.
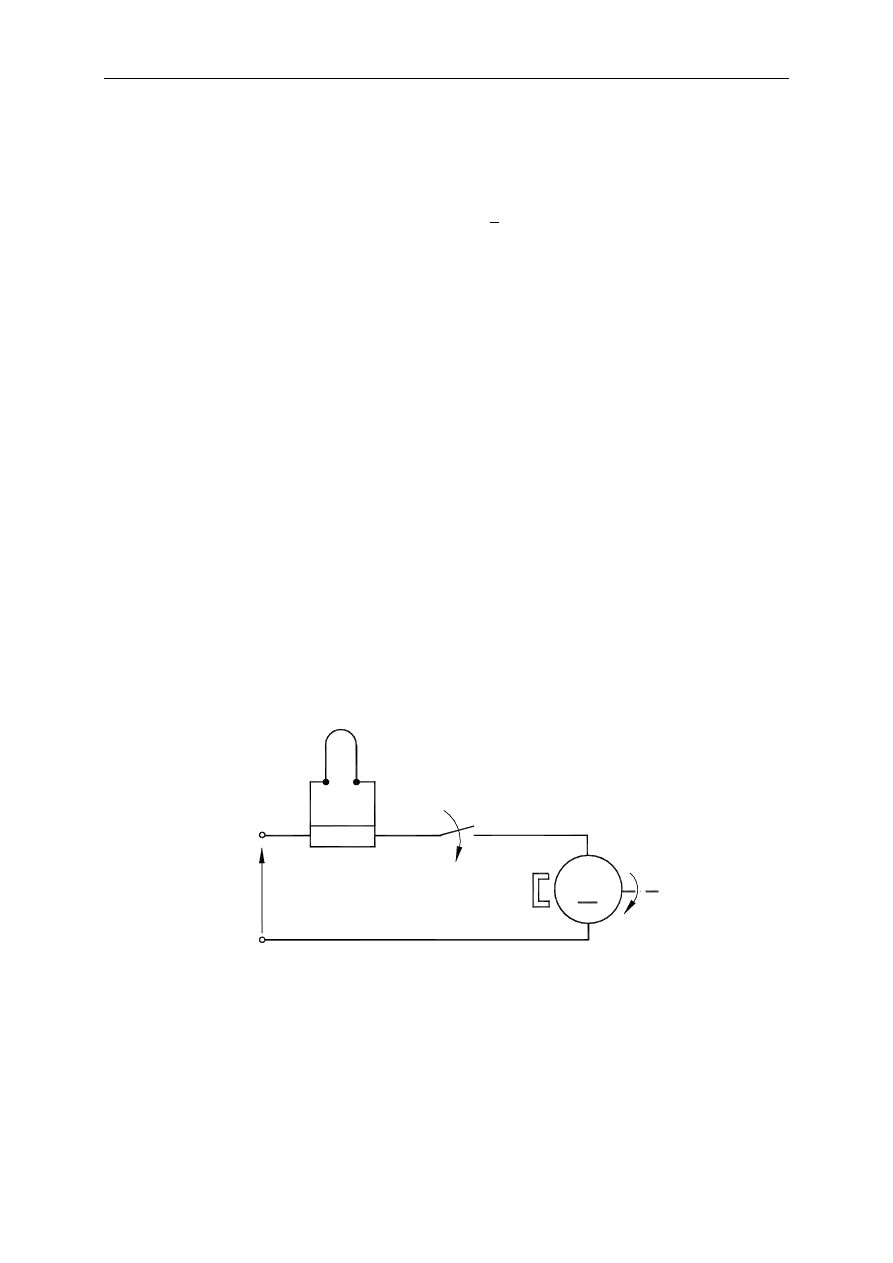
Stałą czasową należy wyznaczyć przy rozprzęgniętych silnikach. Wirnik maszyny
badanej powinien być zahamowany. Należy załączyć stałe napięcie i zarejestrować
przebieg prądu twornika (rys. 2.5).
Należy również zmierzyć metodą techniczną rezystancję bocznika R
b
.
Rezystancję uzwojenia twornika silnika R należy zmierzyć metodą techniczną,
zasilając nieruchomy silnik takim napięciem, aby prąd nie przekroczył 10% wartości
znamionowej. Napięcie pomiarowe należy przyłożyć bezpośrednio do dwóch
sąsiednich działek komutatora.
Osc
M
n
b
R
U
t=0
Rys. 2.5. Schemat ideowy układu do wyznaczania elektromagnetycznej stałej czasowej silnika
Silnik wykonawczy prądu stałego
19
i(t)
t
T
I
0
0
I
i
0
0,632
Rys. 2.6. Wyznaczanie elektromagnetycznej stałej czasowej
T na podstawie przebiegu prądu i(t)
Wyszukiwarka
Podobne podstrony:
Sprawozdanie Silnik wykonawczy prądu stałego
Silnik wykonawczy prądu stałego
Sprawozdanie Silnik wykonawczy prądu stałego
antal,elektrotechnika, Silnik bocznikowy prądu stałego
Silnik szeregowy prądu stałego , LABORATORIUM MASZYN ELEKTRYCZNYCH
dudziński,układy napędowe,Charakterystyki mechaniczne silnika szeregowego prądu stałego
Maszyny Elektryczne 2 (sem IV) Zasada działania silnika i prądnicy prądu stałego
5 Silnik bocznikowy pradu stalego
fizyka, Zastosowanie silnika elektrycznego prądu stałego, Zastosowanie silnika elektrycznego pr&scar
Silnik Elektryczny prądu stałego
Badanie silnika szeregowego prądu stałego, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok
SILNIK BOCZNIKOWY- 3.2 moje, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.
23 Sposoby regulacji predkosci obrotowej silnika bocznikowego pradu stalego
sprawko elektronika silnik szeregowy pradu stalegoMODIFIX
10 Silnik obcowzbudny pradu stalego zasilany z przeksztaltnika tranzystorowego
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.2 BADANIE SILNIKA BOCZNIKO
Silnik szeregowy prądu stałego, ۞ Nauka i Technika, Elektrotechnika, Maszyny elektryczne
więcej podobnych podstron