
1.
Zastosowanie pól bitowych języka C w operacjach bitowych, podad przykład.
Pola bitowe to specjalny typ składnika klasy polegający na tym, że informacja jest
przechowywana na określonej liczbie bitów. Długośd pola bitowego określa ilośd bitów wchodzących w
skład pola. Pola bitowe są używane w celu oszczędzania pamięci lub do operacji niskiego poziomu
wymagających zmian pojedynczych bitów. Dostęp do pola bitowego w zakresie pewnego typu
danych/struktur danych jest realizowany za pomocą '.' (kropka) albo '->' - w zależności od kontekstu w
jakich używamy tegoż pola.
Przykład:
#include <stdio.h>
typedef struct {
unsigned char szyberdach : 1;
unsigned char abs : 1;
unsigned char ilosc_miejsc : 4;
} SAMOCHOD;
void main(void)
{
SAMOCHOD ford;
ford.szyberdach = 1;
ford.abs = 1;
ford.ilosc_miejsc = 2;
}
2.
Interfejs 1-Wire. Podad przebiegi czasowe dla sekwencji resetu, zapisu/odczytu, zera/jedynki. Na
każdym z wykresów zamieścid informację o nadawcy (dla każdego z fragmentów przebiegu)
Nazwa interfejsu 1-Wire wywodzi się stąd, że do całkowitej komunikacji używana jest tylko jedna
linia danych (i jedna linia masy). Dodatkowo, odbiornik może byd zasilany bezpośrednio z linii danych,
wykorzystując zasilanie pasożytnicze, co jest ogromną zaletą tego interfejsu.
Właściwości magistrali 1-Wire:
Wykorzystuje jedną linię do dwustronnej komunikacji.
Wymaga rezystora podciągającego na linii danych (ang. pull-up resistor) najczęściej o wartości 4.7–5
kΩ.
System z magistralą 1-Wire wymaga jednego urządzenia typu Master i jednego lub więcej urządzeo
typu Slave.
Każde urządzenie podłączone jest do magistrali przez koocówkę typu „open drain” lub 3-state port.
Wszystkie dane oraz rozkazy przesyłane są przez magistralę począwszy od najmłodszego bitu (ang.
LSB).
Każda wymiana danych zawiera 3 etapy :
1. Inicjalizacja: Zawiera etap zerowania układu Slave oraz etap potwierdzenia przez Slave’a obecności
na magistrali.
2. Przesyłanie komendy typu ROM:. Każdy układ Slave posiada unikalny 64-bitowy kod. Komendy typu
ROM umożliwiają zaadresowanie konkretnego układu, identyfikację układu, wyszukanie alarmu lub
pominięcie sprawdzania 64-bitowego kodu.
3. Przesłanie funkcji sterującej układu:. Sekwencja tego typu umożliwia realizację wszystkich
dostępnych operacji na wybranym układzie.
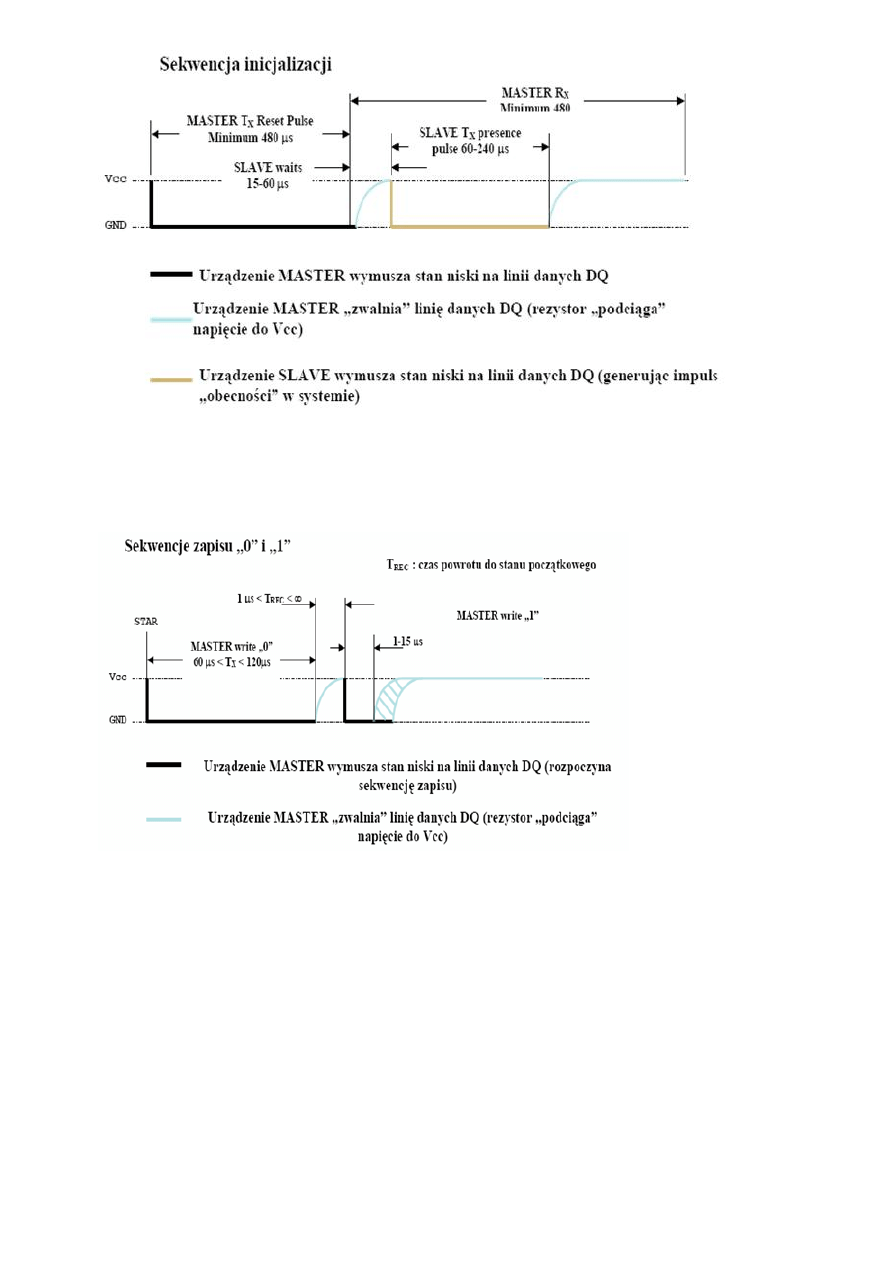
Urządzenie typu master rozpoczyna transmisję sekwencji bitów poprzez wystawienie impulsu reset,
czyli zwarciu linii danych na 480 μs do masy. Powoduje to zresetowanie wszystkich podłączonych
odbiorników (urządzeo typu slave). Następnie każde urządzenie slave potwierdza swoją obecnośd
wystawiając na linię danych impuls obecności - zwierając linię danych do masy na 60 μs.
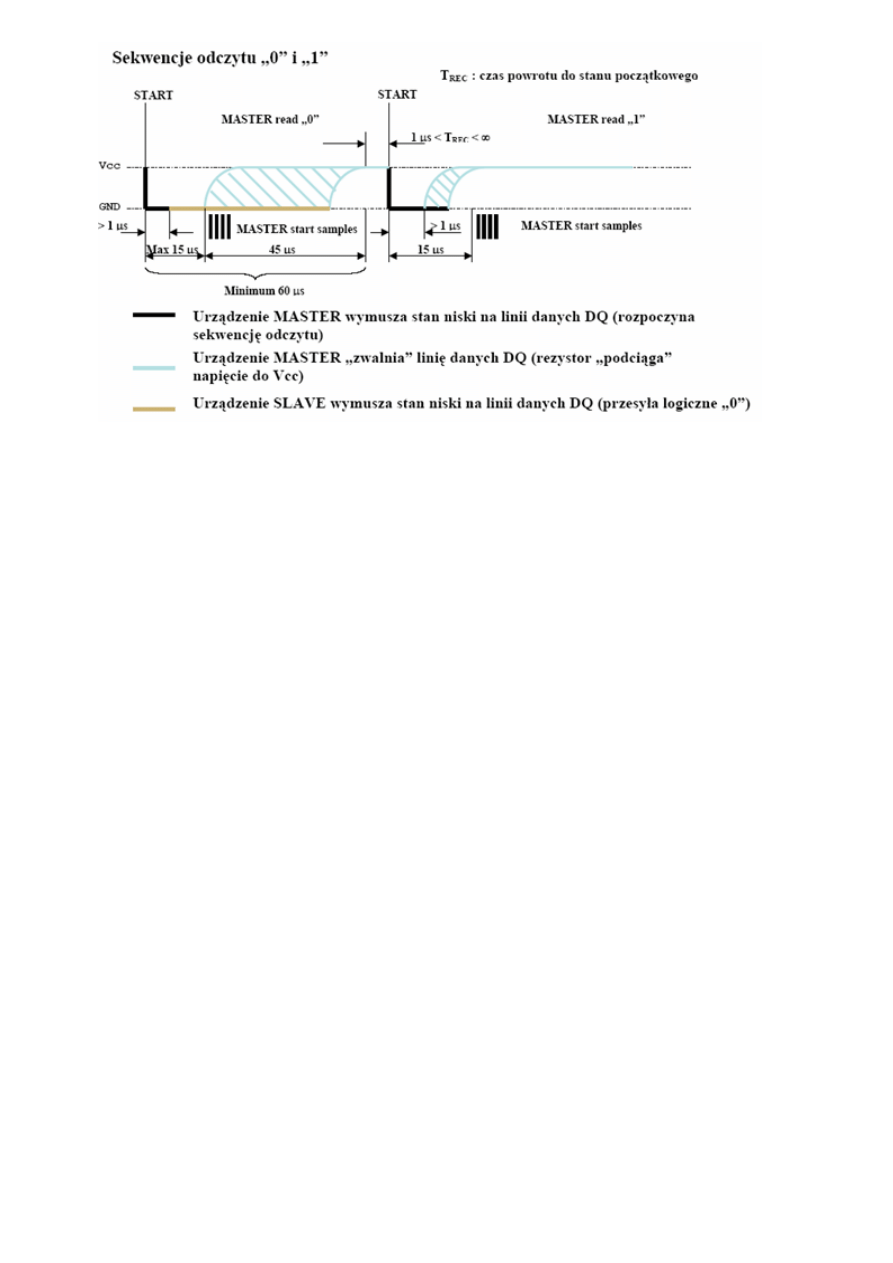
Przesłanie logicznej jedynki na magistralę oznacza wystawienie przez mastera krótkiego (od 1 do 15μs)
impulsu niskiego (zwarcie linii) oraz następnie wysokiego o długości 60 μs. Logiczne zero odpowiada
niskiemu impulsowi o długości od 60 do 120μs.
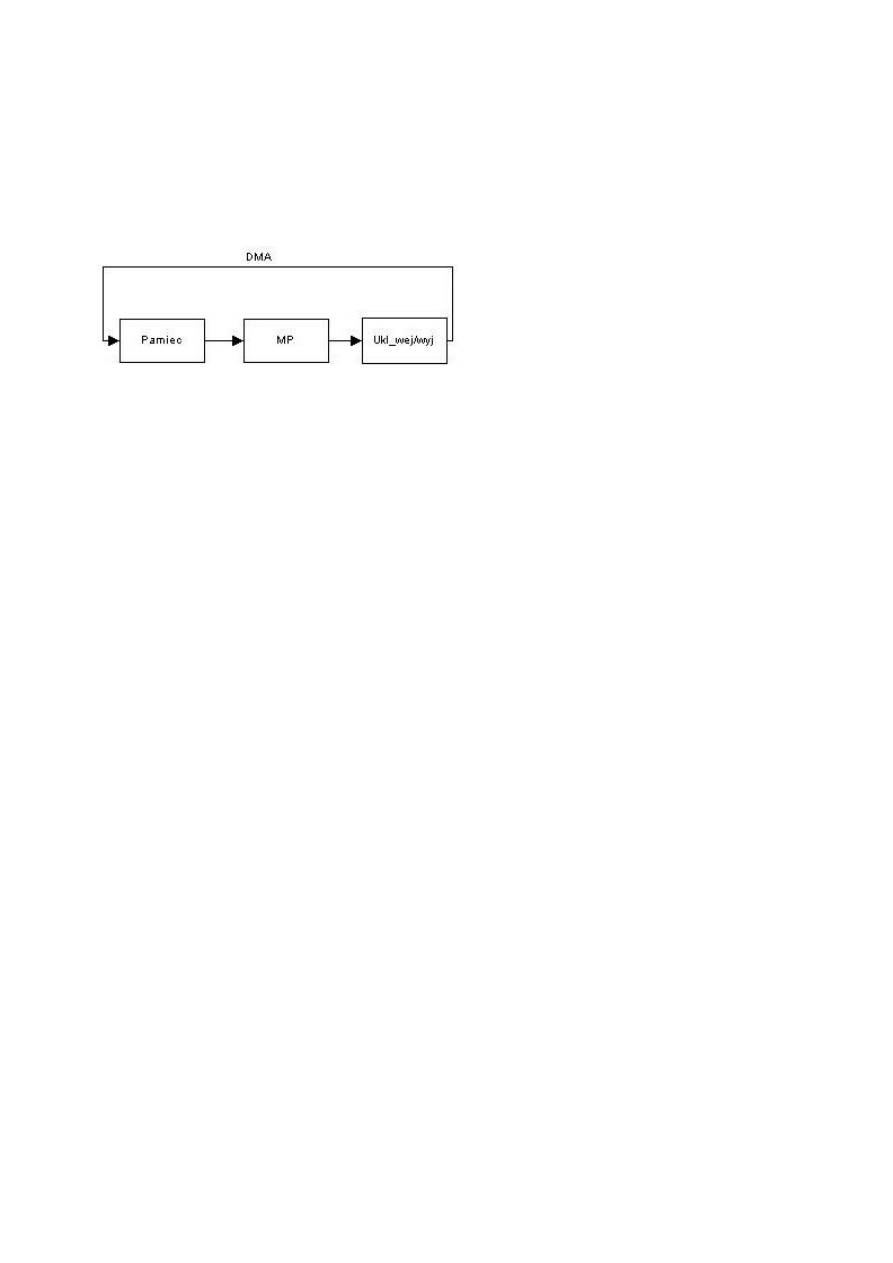
Przed odbiorem każdego bitu danych master wysyła niski impuls startu (od 1 μs do 15 μs), po czym
wraca do stanu wysokiego na linii danych. Jeśli slave chce wysład logiczną jedynką - nie robi nic,
pozostawiając linię w stanie wysokim. Jeśli slave chce wysład zero, wówczas zwiera linię danych do
masy na 60 μs. Po przesłaniu 8 bitów następuje wysłanie komendy (rozkazu) (również ośmiobitowej).
Ewentualne błędy w transmisji mogą byd wykryte za pomocą wbudowanego CRC (również
ośmiobitowego).
Inicjalizacja rozpoczyna się wysłaniem na magistrale przez układ Master impulsu zerującego następnie
układ Slave wysyła impuls obecności. Inicjalizacja pozwala układowi Master wykrycie podłączonych do
niej układów Slave.
Sekwencja zapisu ‘0’ i ‘1’
Nadanie logicznego 0 polega na wygenerowaniu impulsu o czasie trwania 60-120 µs a następnie na
zwolnieniu magistrali i oczekiwaniu minimum 1µs przed nadaniem następnego bita.
Dla logicznej 1 generowany impuls trwa 1-15µs natomiast wymagany czas bezczynności 60µs
Sekwencja odczytu ‘0’ i ‘1’
Układ Master generuje impuls o czasie trwania min 1µs a następnie zwalnia linię DQ. Jeżeli Slave chce
wysład logiczną jedynkę - nie robi nic pozostawiając linię w stanie wysokim. Jeżeli Slave chce wysład 0
wówczas zwiera linię danych do masy. Po przesłaniu 8bitów nastepuje wysłanie komendy rozkazu
3.
Co to jest stan wysokiej impedancji i jakie ma on znaczenie w systemie mikroprocesorowym.
Stan wysokiej impedancji jest to stan, w którym bramka na wyjściu nie posiada ani stanu wysokiego,
ani niskiego. Jej wyjście jest praktycznie odizolowane od wejśd. Dzięki temu możliwe jest proste
zrealizowanie portów dwukierunkowych bez ryzyka uszkodzenia bramek (w wyniku połączenia z sobą
dwóch wyjśd), dwukierunkowych magistral danych. Stan wysokiej impedancji jest aktywowany
poprzez ustawienie stanu wysokiego na określonym wejściu bramki trójstanowej.
4.
Podad sposób wyznaczania adresu podprogramu obsługi przerwania sprzętowego w procesorze
x86 podczas pracy w trybie rzeczywistym i chronionym.
5.
Podad (w postaci dwójkowej) dwie przykładowe czterobitowe liczby, które po zsumowaniu w
czterobitowym sumatorze powodują ustawienie znacznika N (wartośd ujemna) i jednoczesne
wyzerowanie znacznika S (znacznik znaku – U2)
6.
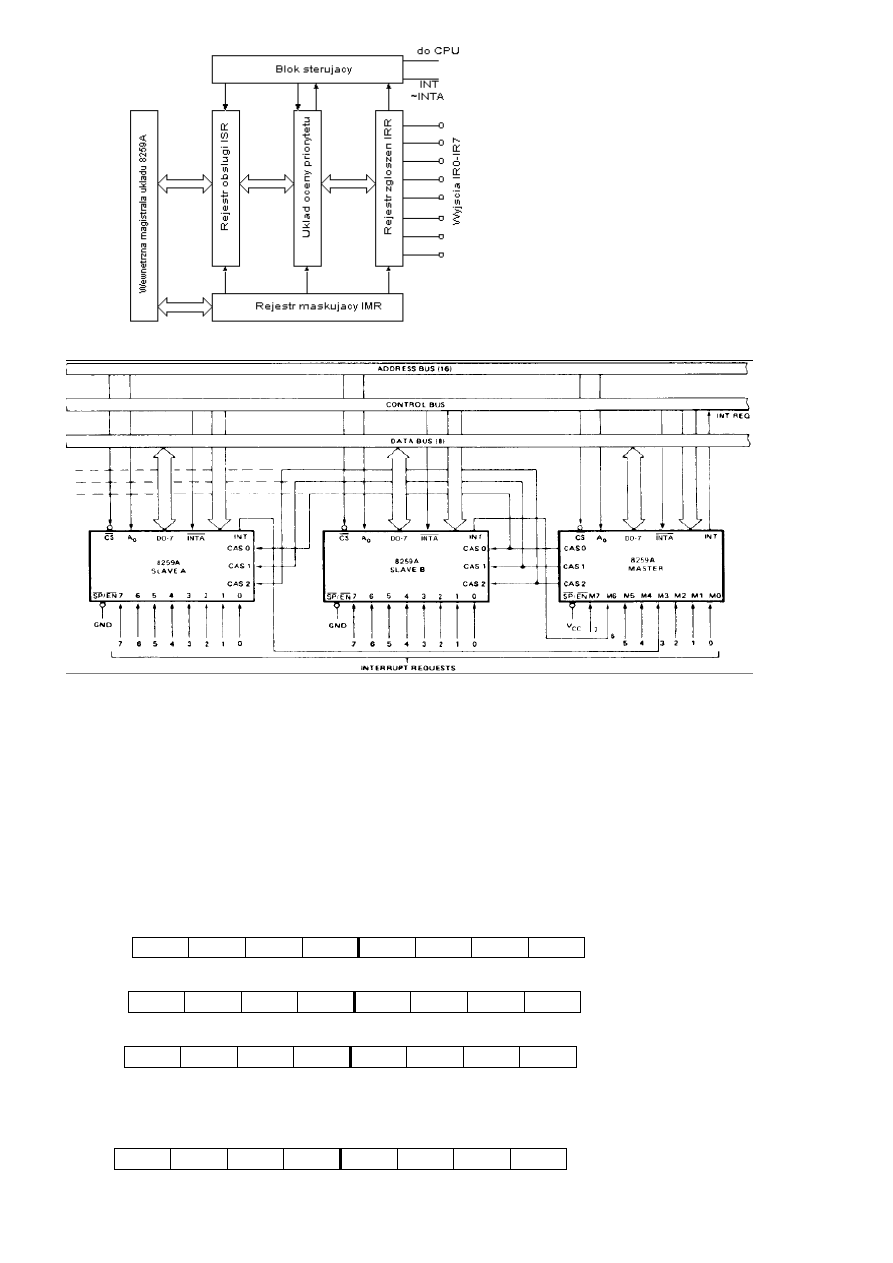
Krótko opisad mechanizm bezpośredniego dostępu do pamięci.
Tryb DMA jest trybem, w którym transmisja danych pomiędzy urządzeniami (np. we/wy) a
pamięcią odbywa się z pominięciem samego mikroprocesora. Może to byd realizowane przez sam
mikroprocesor lub przez specjalny układ zwany kontrolerem DMA. Wymaga on wcześniejszego
skonfigurowania. Tryb transferu DMA pozwala odciążyd procesor od przesłao danych między jednymi
urządzeniami a innymi. W tym czasie CPU może kontynuowad wykonywanie programu. Przykładem
kontrolera DMA jest układ 8237. Możliwe jest kaskadowe połączenie układów 8237, aby zwiększyd
ilośd urządzeo mogących pracowad w trybie DMA.
Jest to przesyłanie danych bezpośrednio z
pamięci do układu we/wy z pominięciem
mikroprocesora. Realizacja transmisji DMA
wymaga zastosowania specjalnego układu
tzw. sterownika DMA. Układ ten inicjuje
transmisję przez zablokowanie
mikroprocesora w trakcie transmisji adresuje
komórki pamięci, dlatego wymaga zewnętrznego sygnału zegarowego. Przed rozpoczęciem transmisji
musi byd odpowiednio zaprogramowany. Sama transmisja może byd wykonywana po zablokowaniu
pracy mikroprocesora lub w cyklach zegarowych, podczas których przetwarza on dane.
Układ we/wy wykorzystujący transmisję DMA musi byd wyposażony w dwa dodatkowe sygnały
sterujące(wyjściowy DRQ i wejściowy DACK). Sygnałem DRQ zgłasza się żądanie obsługi do sterownika
DMA. DACK oznacza zgodę na rozpoczęcie transmisji i jest wystawiany przez sterownik DMA
Zaletą transmisji DMA jet szybkośd przesyłania dużych ilości informacji (tzw. Bloków), wadą jest
skomplikowanie układów w postaci układu DMA i dodatkowych sygnałów sterujących.
7.
Podad w postaci dwójkowej dwie ośmiobitowe liczby, które po zsumowaniu powodują
ustawienie znacznika CY (przeniesienie) i jednoczesne wyzerowanie znacznika OV (nadmiar)
8.
Co to jest stos? Podad i opisad przykładowe operacje na stosie.
Stos (ang. LIFO, Last In, First Out; ostatni na wejściu, pierwszy na wyjściu) – liniowa struktura
danych, w której dane dokładane są na wierzch stosu i z wierzchołka stosu są pobierane. Ideę stosu
danych można zilustrowad jako stos położonych jedna na drugiej książek – nowy egzemplarz kładzie
się na wierzch stosu i z wierzchu stosu zdejmuje się kolejne egzemplarze. Elementy stosu poniżej
wierzchołka stosu można wyłącznie obejrzed, aby je ściągnąd, trzeba najpierw po kolei ściągnąd to, co
jest nad nimi.
Przykładowe instrukcje:
Push – odłożenie obiektu na stos
Pop – ściągnięcie obiektu ze stosu i zwrócenie jego wartości
Call – odłożenie adresu następnej instrukcji na stos
Ret – ściągnięcie adresu ze stosu; powrót z podprogramu
Pamięd SRAM w układach AVR powierzono dodatkową i istotną rolę. Poza miejscem przechowywania
danych, pamięd ta stanowi jednocześnie stos mikrokontrolera. Pamięd stosu wykorzystana może byd
do tymczasowego przetrzymywania zmiennych lokalnych oraz zapamiętywania adresów powrotu
przy wywoływaniu podprogramów.
Dokładanie danych na stos (push) powoduje dekrementację wskaźnika stosu, a ich ściąganie (po)
jego inkrementacje. Konsekwentnie wywołanie podprogramu (call, wystąpienie przerwania)
zmniejsza wartośd tego wskaźnika (przesyła na stos adres powrotu), powrót( Ret, reti) jego
zwiększenie. W przypadku skoków na stos odkładany jest licznik programu o długości 2 bajtów.
9.
Porównad technologię MMX i SSE.
MMX jest dodatkowym zestawem instrukcji wprowadzonym w procesorach Pentium MMX.
MMX pozwala za pomocą jednej instrukcji wykonywad operacje na zbiorze kilku danych (SIMD –
single instruction, multiple data). Instrukcje te służą do operowania liczbami całkowitymi (z i bez

znaku). Instrukcje MMX pozwalają również na przeprowadzanie obliczeo z tzw. nasycaniem. Dzięki
temu dodanie dwóch liczb, które przepełniłyby rejestr spowoduje ustawienie w nim najwyższej
możliwej wartości. Zestaw instrukcji SSE (Streaming SIMD Extensions) został wprowadzony do
procesorów Pentium III. Pozwala na wykonywanie instrukcji SIMD na liczbach
zmiennoprzecinkowych.
10.
Kaskadowe łączenie kontrolerów przerwao i kontrolerów bezpośredniego dostępu do pamięci.
Podad różnice i podobieostwa.
Kontroler przerwao jest urządzeniem pozwalającym na zgłaszanie przerwao przez wiele urządzeo
przy wykorzystaniu jednej linii przerwao mikroprocesora. Układ umożliwia także ustawianie
priorytetów przerwao. Pojedynczy 8259 umożliwia obsługę 8 przerwao. Możliwe jest jednak
podłączenie kaskadowe kontrolerów, co pozwala obsłużyd ich większą ilośd. Połączenie takie jest
realizowane jak na rysunku. Jedno z urządzeo pracuje w trybie master, z kolei pozostałe kontrolery
działają jako układ slave. Wyprowadzenia CAS0:2 wszystkich urządzeo łączy się ze sobą równolegle.
Linie kontrolera master przesyłają sygnały do układów slave. Z kolei wyjścia INT układów slave są
podłączane do wejśd M7:0 układu master (każdy slave do jednego wejścia Mx). Wyjście INT układu
master jest podłączone z wejściem IRQ mikroprocesora. Układy wymagają skonfigurowania do
pracy w trybie kaskadowym.
Układy połączone są ze sobą trzema liniami adresowymi CAS0:2. Każdy z kontrolerów
rozpoznaje swoją rolę (Master lub Slave) badając poziom sygnału SP/EN. Zero logiczne konfiguruje
układ jako SLAVE. Do każdego kaskado połączonego kontrolera doprowadzony jest z procesora
sygnał INTA. lecz tylko układ Mastter jest połączony ze swojego wyjścia INT z wejściem procesora
INTREQ.
Obsługa przerwao od układu MASTER:
Urządzenie połączone z wejściem o numerze n zgłasza przerwanie wymuszając wysoki poziom
logiczny na linii IRn
Jeżeli bit n w rejestrze maskującym IMR jest ustawiony to powoduje ignorowanie wszelkich
przerwao nadchodzących tą linią, jeżeli nie to powoduje ustawienie n-tego bitu w rejestrze zgłoszeo
IRR
Następnie układ oceny priorytetu wybiera w przypadku większej liczby zgłoszeo to o najwyższym
priorytecie i wysyła go do rejestru obsługi ISR
w ISR obsługiwane jest przerwanie , procesor wysyła sygnał INTA a kontroler odpowiada do niego
wystawieniem na szynę danych D0:7 wektora przerwao
następnie rejestr ISR jest zerowany co objawia się gotowością do obsługi kolejnego przerwania
Obsługa przerwao od układu SLAVE:
zgłoszenie ustawia n bit w rejestrze zgłoszeo IRR układu SLAVE i po opracowaniu priorytetów,
wysyła sygnał INT do układu Master
układ master otrzymuje zgłoszenie na linii IR2, co powoduje ustawienie bitu 2 w rejestrze IRR
układ master opracowawszy priorytet własnych zgłoszeo, wysyła sygnał INT do procesora
procesor odpowiada pierwszym sygnałem INTA, następnie układ Master adresuje liniami CAS0:2
układ Slave odpowiadający za obsługę zgłoszonego przerwania
w obu układach następuje przesunięcie bitu odpowiadającego obsługiwanemu kanałowi z IRR do
ISR
drugi impuls INTA Z CPU nakazuje układowi Slave wystawienie na szynę danych (D7:0) wektora
przerwao
zerowane są rejestry ISR układu Master i Slave
11.
Sumowanie dwucyfrowych liczb w kodzie BCD. (znacznik przeniesienia połówkowego, zasada
stosowania poprawki BCD)
BCD – Binary Coded Decimal – kod dwójkowo-dziesiętny, który przyporządkowuje cyfrom
dziesiętnym od 0 do 9 wektory informacji cyfrowej zwane z tego powodu kęsami BCD.
Najważniejszą zaletą kodów BCD jest prostota konwersji liczb pomiędzy postaciami: dziesiętną i
binarną. Typowe zastosowania to: wyświetlacze liczb w postaci dziesiętnej np. kalkulatory.
Przykład liczbie 1937 w kodzie BCD odpowiada: 0001 1001 0011 0111
Poprawka BCD:
0
0
1
0
0
1
1
1
+
0
1
0
0
1
0
0
1
=
0
1
1
1
0
0
0
0
Należy zastosowad poprawkę BCD, ponieważ w wyniku dodawania nastąpiło przeniesienie pomiędzy
segmentami. Poprawka ta polega na dodaniu 6. Ostateczny wynik po poprawce wygląda następująco:
0
1
1
1
0
1
1
0
W powyższym przykładzie wszystko jest OK, nastąpiło przeniesienie -> dodano 6. Natomiast jeśli
dodamy inne liczby np. 0111 i 1000 czyli 7 i 8 wówczas jako wynik otrzymamy 1111. Z punktu widzenia

kodu BCD wynik ten jest nieprawidłowy, ponieważ w tym kodzie największą wartością na danych 4
bitach może byd 1001. W tym przypadku należy sprawdzad czy otrzymana w wyniku dodawania liczba
w danym segmencie nie jest większa od 9, jeśli tak wówczas trzeba dodad 6. Podsumowując, jeśli
mamy liczbę składającą się z dwóch kęsów BCD, tak jak na powyższych schematach, wówczas:
Jeżeli cztery mniej znaczące bity wyniku zawierają liczbę większą od 9 (tzn. od 1001) lub dodatkowe
przeniesienie ma wartośd 1, to do wartości wyniku należy dodad liczbę 6 (0110);
Jeżeli cztery bardziej znaczące bity wyniku zawierają liczbę większą niż 9 lub przeniesienie (z
najbardziej znaczącej pozycji) ma wartośd 1, to do wartości wyniku należy dodad liczbę 60 (01100000);
12.
Co to są drgania styków? Opisad sposób eliminacji wpływu drgao styków.
Drgania styków jest to efekt niepożądany jaki występuje w momencie wciskania i zwalniania
przycisku. Objawia się on występowaniem na zmianę losowych przełączeo między stanami wysokimi i
niskimi. Efekt ten utrzymuje się przez kilkanaście milisekund. Dobrym sposobem eliminacji drgao jest
zastosowanie pętli czasowej wykonywanej po wykryciu wciśnięcia przycisku tak długo, aby stan wejścia
był już stabilny.
13.
Porównad operację przesunięcia logicznego w prawo z operacją przesunięcia arytmetycznego w
prawo. Podad przykłady ilustrujące zastosowanie obu operacji do wykonywania operacji
dzielenia liczb bez znaku i ze znakiem.
Przesunięcie bitowe - operacja na liczbach dwójkowych polegająca na przesunięciu wszystkich cyfr
binarnych o n pozycji w lewo lub prawo. Najczęściej przesunięcie wykorzystuje się do szybkiego
mnożenia(lewo)/dzielenia(prawo) przez liczbę 2 i jej potęgi oraz do sekwencyjnego testowania
wartości poszczególnych bitów.
a) przesunięcie logiczne w lewo
Wszystkie wartości w liczbie przesuwane są o 1 pozycję w lewo. Na najmłodszą pozycję (LSB)
dopisywany jest bit o wartości zero, natomiast najstarszy bit (MSB) jest tracony. Wartośd liczby w
naturalnym kodzie binarnym jest 2 razy większa. Większe przesunięcia są równoważne
przemnożeniu przez potęgę dwójki.
b) przesunięcie logiczne w prawo
Wszystkie wartości w liczbie przesuwane są o 1 pozycję w prawo. Na najstarszą pozycję(MSB)
dopisywany jest bit o wartości zero, natomiast najmłodszy bit jest tracony(LSB). Wartośd liczby w
naturalnym kodzie binarnym jest 2 razy mniejsza (dzielenie całkowitoliczbowe).
c) Przesunięcie arytmetyczne w prawo
Wszystkie wartości liczby są przesuwane o 1 pozycję w prawo. Bit z najstarszej pozycji(MSB) jest
powielany, natomiast najmłodszy bit jest tracony(LSB).
Przykład:
(MSB)10010101 -> 11001010
14.
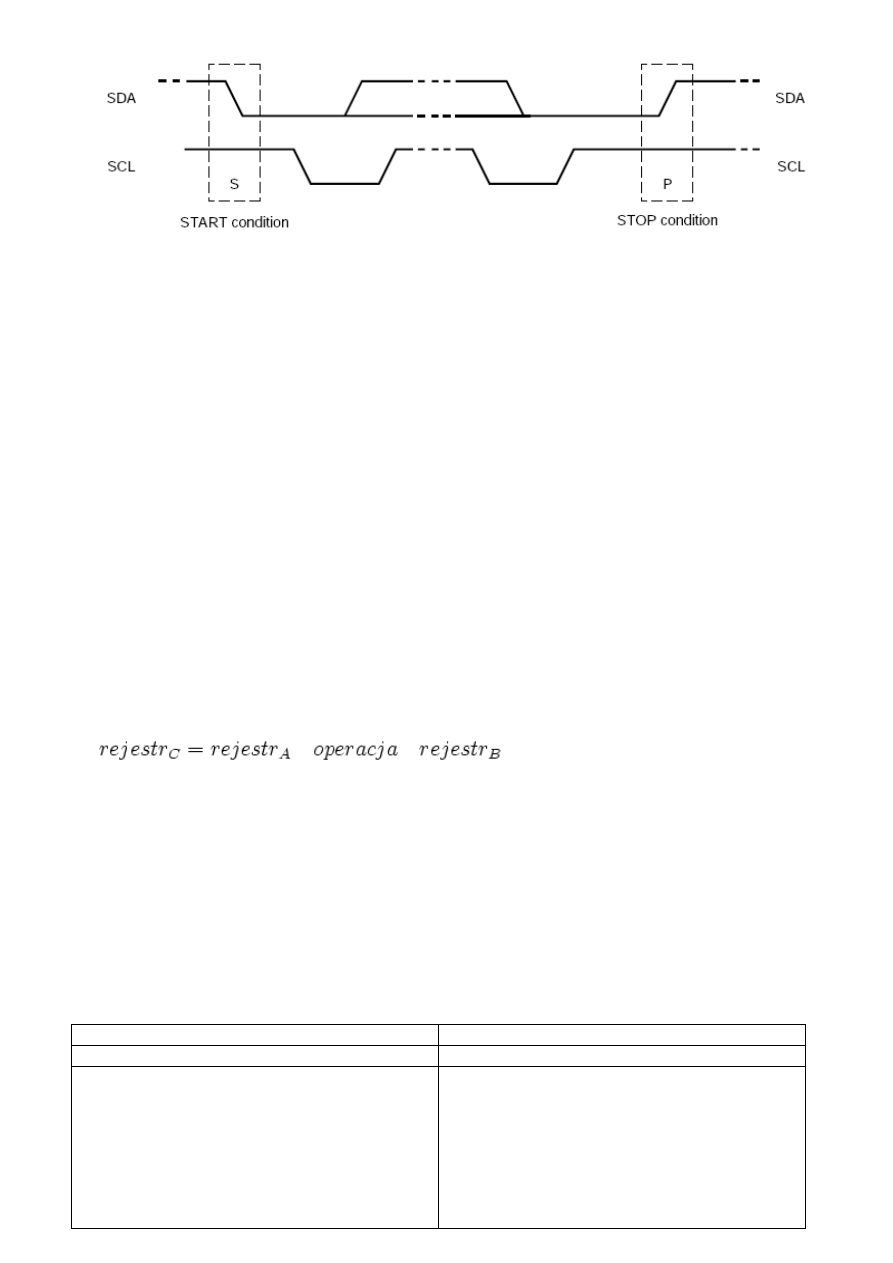
Opisad interfejs I2C. Podad sekwencję startu, powtórzonego startu, stopu, transmisji
pojedynczego bitu oraz sekwencję pełnej transmisji. Wyjaśnid zastosowanie sekwencji
powtórzonego startu.
Gdy na linii SDA stan logiczny zmienia się z '1' na '0', a na linii SCL jest stan '1', to sytuacja taka nazywa
się START. Natomiast gdy na linii SDA stan logiczny zmienia się z '0' na '1', podczas wysokiego poziomu
na linii SCL, to sytuacja taka nazywa się STOP. Przedstawione to zostało na poniższych wykresach:
W protokole I
2
C transmisja danych odbywa się szeregowo, w dwóch kierunkach przy użyciu dwóch linii.
Jedna z nich SCL(serial clock Line) przesyła impulsy zegarowe synchronizujące transmisję, natomiast
druga SDA(serial data Line) przesyła dane w dwóch kierunkach.
Stan linii danych może byd zmieniany, gdy linia zegarowa SCL znajduje się w stanie niskim.
15.
Podad zasady ustawiania znaczników: przeniesienia C, wartości ujemnej N, nadmiaru U2 V, oraz
znaku S. Podad przykłady (operator i wartośd operandów), które w arytmometrze 8bitowym
dokonują ustawienia bądź wyzerowania wymienionych znaczników.
16.
Dokonad podziału mikroprocesorów pod kątem mapy pamięci oraz listy instrukcji.
Ze względu na typ listy instrukcji mikroprocesory można podzielid na:
RISC (ang. Reduced Instruction Set Computer)
Jako przykłady można wymienid: Atmel AVR, ARM, Ralpha, MIPS, SPARC, Intel 80860
CISC (ang. Complex Instruction Set Computer)
Jako przykłady można wymienid: AMD, x86
Podstawowe cechy architektury RISC w porównaniu z CISC:
Zredukowana liczba rozkazów do niezbędnego minimum. Ich liczba wynosi kilkadziesiąt, podczas gdy w
procesorach CISC sięga setek. Upraszcza to znacznie dekoder rozkazów.
Redukcja trybów adresowania, dzięki czemu kody rozkazów są prostsze, bardziej zunifikowane, co
dodatkowo upraszcza wspomniany wcześniej dekoder rozkazów. Ponadto wprowadzono tryb
adresowania, który ogranicza ilośd przesłao - większośd operacji wykonuje się wg schematu:
Ograniczenie komunikacji pomiędzy pamięcią, a procesorem. Przede wszystkim do przesyłania danych
pomiędzy pamięcią, a rejestrami służą dedykowane instrukcje, które zwykle nazywają się load (załaduj
z pamięci), oraz store (zapisz do pamięci); pozostałe instrukcje mogą operowad wyłącznie na
rejestrach. Schemat działania na liczbach znajdujących się w pamięci jest następujący: załaduj daną z
pamięci do rejestru, na zawartości rejestru wykonaj działanie, przepisz wynik z rejestru do pamięci.
Zwiększenie liczby rejestrów (np. 32, 192, 256, podczas gdy np. w architekturze x86 jest zaledwie 8
rejestrów), co również ma wpływ na zmniejszenie liczby odwołao do pamięci.
Dzięki przetwarzaniu potokowemu (ang. pipelining) wszystkie rozkazy wykonują się w jednym cyklu
maszynowym, co pozwala na znaczne uproszczenie bloku wykonawczego, a zastosowanie
superskalarności także na zrównoleglenie wykonywania rozkazów. Dodatkowo czas reakcji na
przerwania jest krótszy.
W skrócie:
RISC
CISC
Zbiór instrukcji jest ortogonalny
Rozbudowana liczba instrukcji
Mała liczba instrukcji
Zredukowana liczba rozkazów, upraszcza to
znacznie dekoder rozkazów
Redukcja trybu adresowania => prostsze kody
rozkazów
Ograniczenie komunikacji między pamięcią a
procesorem. Do przesyłanie danych między
pamięcią a rejestrami służa dedykowane instrukcje
Wysoka specjalizacja instrukcji
Duża liczba rozkazów
Niektóre rozkazy potrzebują dużej liczby cykli
procesora do wykonania
Wystąpienie złożonych ,specjalistycznych rozkazów
Duża liczba trybów adresowania
Do pamięci może odwoływad się duża liczba
rozkazów

(load, store)
Zwiększenie liczby rejestrów(np.32,192,256)
Dzięki przetwarzaniu potokowemu (pip eling)
wszystkie rozkazy wykonują się w jednym cyklu
maszynowym
Mniejsza od układów RISC częstotliwośd taktowania
procesora
Powolne działanie dekodera rozkazów
17.
Wyjaśnid działanie instrukcji wywołania podprogramu i powrotu z podprogramu. Dokonad
porównania z mechanizmem wywołania podprogramu obsługi przerwania oraz z instrukcją
powrotu z podprogramu obsługi przerwania.
18.
Zaprojektowad dekoder adresów który wystawia sygnał CS niski dla adresów w zakresie *0x20,
0x2F+ oraz CS wysoki dla pozostałych adresów w przypadku 16 bitowej magistrali adresowej.
Wyszukiwarka
Podobne podstrony:
Historia wojen 01 Opracowanie pytan id 204401
Nasze opracowanie pytań 1 40
Opracowanie pytań z anatomii
opracowanie pytań z optyki
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
opracowanie pytan id 338374 Nieznany
opracowanie pytan karafiata
Opracowanie pytań 2 kolokwium
cw 3 broma opracowanie pytan 810
Nhip opracowanie pytan id 31802 Nieznany
filozofia opracowanie pytań
opracowanie pytan Automatyka
pytania egz ekonimak II, OPRACOWANIE PYTAŃ NA EGZAMIN
Zestaw 88 Kasia Goszczyńska, materiały farmacja, Materiały 3 rok, Od Ani, biochemia, biochemia, opra
opracowane zestawy, OPRACOWANIE PYTAŃ NA EGZAMIN
Opracowanie pytań MAMET METALE
więcej podobnych podstron