29
6.6. Zagadnienie transportowe – algorytm transportowy
Do problemów decyzyjnych rozwiązywanych przy pomocy metod programowania
liniowego należy klasyczne zagadnienie transportowe. Polega ono na ustaleniu takiego planu
przewozów, aby ponieść jak najmniejsze łączne koszty.
W zagadnieniu transportowym wyróżniamy:
1. Punkty nadania towaru - nazywane dostawcami. Przyjmujemy, że w analizowanym
problemie występuje m dostawców, których oznaczamy symbolami:
m
D
D
D
,
,
,
2
1
K
.
2. Punkty odbioru towaru - nazywane odbiorcami. Przyjmujemy, że w analizowanym
problemie występuje n odbiorców, których oznaczamy symbolami:
n
O
O
O
,
,
,
2
1
K
.
Zakładamy, że każdy z dostawców posiada taki sam towar, takiej samej jakości (bez
braków), odpowiednio w ilościach:
m
a
a
a
,
,
,
2
1
K
(ilości te określają podaż towaru u
dostawców). Na ten sam towar zgłosili zapotrzebowanie odbiorcy odpowiednio w ilościach:
n
b
b
b
,
,
,
2
1
K
(popyt odbiorców). Jednostkowy koszt przewozu towaru od dostawcy „i” do
odbiorcy „j” wynosi
ij
c
dla
m
i
,
,
2
,
1
K
=
oraz
n
j
,
,
2
,
1
K
=
.
Oznaczmy przez
ij
x
(zmienna decyzyjna) ilość towaru przewożoną na od dostawcy „i” do
odbiorcy „j” ( na trasie
)
,
(
j
i
) wówczas plan przewozów zapiszemy jako macierz
=
mn
m
m
n
n
x
x
x
x
x
x
x
x
x
L
M
M
M
M
M
M
L
L
2
1
2
22
21
1
12
11
X
.
Zakładamy, że macierz X jest macierzą o nieujemnych elementach (dla wszystkich dostaw:
0
≥
ij
x
- towar jest przewożony od dostawcy do odbiorcy a nie odwrotnie).
Model zadania transportowego można zapisać następująco:
Znaleźć najmniejszą wartość funkcji
∑∑
=
=
⋅
=
m
i
n
j
ij
ij
x
c
f
1
1
)
(X
na zbiorze rozwiązań
dopuszczalnych
X
,w którym spełnione są:
a. warunki dla dostawców
≤
+
+
+
≤
+
+
+
≤
+
+
+
m
mn
m
m
n
n
a
x
x
x
a
x
x
x
a
x
x
x
L
L
L
L
L
L
L
L
L
L
L
L
L
2
1
2
2
22
21
1
1
12
11

30
b. warunki dla odbiorców
=
+
+
+
=
+
+
+
=
+
+
+
n
mn
n
n
m
m
b
x
x
x
b
x
x
x
b
x
x
x
L
L
L
L
L
L
L
L
L
L
L
L
L
2
1
2
2
22
12
1
1
21
11
c. warunki brzegowe
0
≥
ij
x
dla
m
i
,
,
2
,
1
K
=
oraz
n
j
,
,
2
,
1
K
=
.
Macierz współczynników przy niewiadomych jest macierzą wymiaru
)
(
)
(
n
m
n
m
⋅
×
+
, której
elementy przyjmują wartości ze zbioru
}
1
,
0
{
.
Zauważmy, że zgodnie z wcześniejszymi założeniami - łączna podaż dostawców
wynosi:
∑
=
m
i
i
a
1
natomiast łączne zapotrzebowanie odbiorców jest równe:
∑
=
n
j
j
b
1
. Mogą zajść
następujące przypadki:
1.
∑
=
m
i
i
a
1
≥
∑
=
n
j
j
b
1
- zadanie transportowe nazywamy zadaniem otwartym;
2.
∑
=
m
i
i
a
1
=
∑
=
n
j
j
b
1
- zadanie transportowe nazywamy zadaniem zamkniętym;
3.
∑
=
m
i
i
a
1
≤
∑
=
n
j
j
b
1
- zadanie transportowe jest wówczas zadaniem sprzecznym.
Zadania transportowe otwarte (1.) można przekształcić na zadania zamknięte
zwiększając liczbę dostawców. Przyjmujemy, że w problemie występuje dostawca dodatkowy
(fikcyjny, traktowany jako magazyn dostawców) oznaczamy go symbolem
1
+
n
O
, którego
zapotrzebowanie jest równe różnicy między podażą i popytem;
∑
∑
=
=
+
−
=
n
j
j
m
i
i
n
b
a
b
1
1
1
.
Przyjmujemy, że jednostkowe koszty przewozu towaru od dostawcy „
i” do odbiorcy „n+1”
wynoszą
0
1
,
=
+
n
i
c
dla
m
i
,
,
2
,
1
K
=
.
Klasyczne zadanie transportowe jest więc zadaniem programowania liniowego i do
jego rozwiązania można zastosować algorytm simpleks. Jest on jednak mało efektywny ze
względu na dużą liczbę niewiadomych występujących w modelu. Stąd też dla zadań
transportowych opracowano nowy, efektywniejszy sposób wyznaczania rozwiązania
optymalnego nazywany algorytmem transportowym (zostanie on zaprezentowany w
następnym punkcie). Opis tej metody można znaleźć także, np. w pozycji [3] s.92-111.
Algorytm transportowy
Jest, podobnie jak algorytm simpleks, metodą numeryczną realizowaną w sposób
iteracyjny. Algorytm transportowy stosujemy do wyznaczania rozwiązania optymalnego
zadań transportowych zamkniętych. Jego zastosowanie nie wymaga zapisu modelu
matematycznego zadania (było to konieczne przystosowaniu algorytmu simpleks) lecz
31
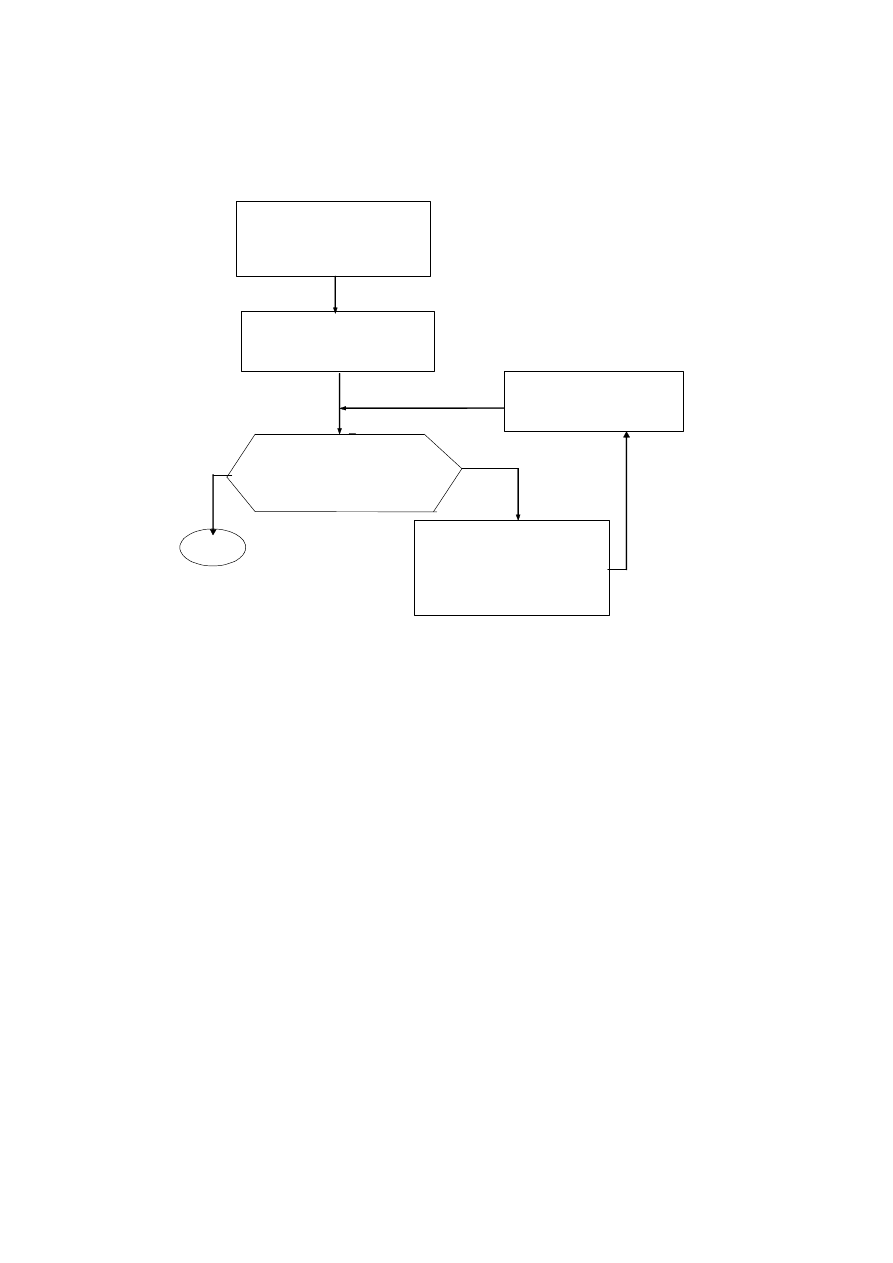
jedynie informacji o parametrach zadania. W algorytmie tym wykonuje się dwa powtarzające
się na przemian etapy: wyznaczanie rozwiązania bazowego i sprawdzania czy jest ono
optymalne. Schemat działania tego algorytmu podano na Rys 2.
Poda
ć
parametry zadania
m
a
a
a
,
,
,
2
1
K
;
n
b
b
b
,
,
,
2
1
K
ij
c
dla
m
i
,
,
2
,
1
K
=
oraz
n
j
,
,
2
,
1
K
=
W yznaczy
ć
dowolny
bazowy plan dostaw
i zapisa
ć
go w tablicy
Sprawdzi
ć
, czy wyznaczone
rozwi
ą
zanie bazowe jest
optymalnym planem
przewozów?
Koniec
oblicze
ń
1. W ybra
ć
tras
ę
przewozu
)
,
(
j
i
na której uzyskujemy
najwy
ż
sz
ą
obni
ż
k
ę
kosztów:
2. Ustali
ć
wielko
ść
przewozu
ij
x
na wybranej trasie
TAK
NIE
W yznaczy
ć
nowy poprawiony
(bazowy) plan dostaw
i zapisa
ć
go w tablicy
Rys. 2. Schemat blokowy postępowania w algorytmie transportowym
Omówimy teraz poszczególne fragmenty tego postępowania.
A. Wyznaczanie startowego rozwiązania bazowego i zapis tego rozwiązania w tablicy
transportowej
Postępowanie iteracyjne rozpoczynamy od wyznaczenia dowolnego, ale bazowego
dopuszczalnego planu dostaw (spełniającego warunki dla dostawców, warunki dla odbiorców
oraz warunki brzegowe). Rozwiązanie bazowe (bazowy plan dostaw) zamkniętego zadania
transportowego zawiera (
m+n-1) zmiennych decyzyjnych
ij
x
(co wynika z faktu, że dla
zadania zamkniętego warunki dla dostawców są spełnione jako równości i rzędy: macierzy
współczynników otrzymanego układu (
m+n) równań i układu uzupełnionego o kolumnę
wyrazów wolnych są równe (
m+n-1)). Wobec tego należy zbudować taki plan dostaw aby
liczba dodatnich dostaw (
0
>
ij
x
) była nie większa niż (
m+n-1).
Wśród metod wyznaczania takiego planu wyróżnimy: metodę kąta północno
zachodniego i metodę minimalnego elementu macierzy kosztów. Sposoby te omówimy
dokładnie w przykładzie AT-1.
B. Sprawdzenie, czy wyznaczone rozwiązanie bazowe określa optymalny plan dostaw,
czyli taki w którym łączne koszty transportu są najmniejsze
Polega to na wyznaczeniu wskaźników optymalności
ij
∆
dla każdej z tras
)
,
( j
i
odpowiadających zmiennym niebazowym
ij
x
. Wskaźniki te wyznaczamy jako różnice
32
ij
ij
ij
c
c
~
−
=
∆
,
gdzie
ij
c~
są tzw. kosztami pośrednimi, które obliczamy jako sumy
j
i
ij
v
u
c
+
=
~
.
Liczby
i
u i
j
v
wyznacza się jako dowolne rozwiązanie szczególne nieoznaczonego układu
(
m+n-1) równań postaci:
ij
j
i
c
v
u
=
+
,
otrzymanego dla tych kosztów jednostkowych, które odpowiadają bazowym zmiennym
decyzyjnym
ij
x
.
Jeżeli wskaźniki optymalności spełniają warunek
0
)
,
(
≥
∆
∀
ij
j
i
,
to plan dostaw jest planem optymalnych, czyli takim przy którym łączne koszty
transportu są najmniejsze.
Postępowanie przy sprawdzaniu optymalności planu dostaw będzie omówione szczegółowo
w przykładzie AT-2.
C. Budowa nowego, poprawionego rozwiązania bazowego
Jeśli sprawdzając optymalność planu dostaw otrzymamy ujemne wartości wskaźników
ij
∆
, to plan ten nie jest optymalny i poszukujemy nowego lepszego planu dostaw. W
pierwszej kolejności ustalamy trasę
)
,
( j
i
, na którą należy skierować dostawę tak aby
najbardziej obniżyć łączne koszty transportu. Wybieramy taką trasę
)
,
( l
k
dla której
kl
∆
jest
najmniejsza z ujemnych
ij
∆
:
{ }
ij
kl
ij
∆
=
∆
<
∆
0
min
.
W następnej kolejności szukamy cyklu, który tworzy wybrana trasa
)
,
( l
k
z tymi
trasami (niekoniecznie z wszystkimi), które odpowiadały niewiadomym bazowym
ij
x
,
a następnie ustalamy wielkość dostawy
kl
x na trasie
)
,
( l
k
. Szczegóły tego postępowania
zilustrowane będą w przykładzie AT-3.
Zagadnienia związane z modelowaniem i rozwiązywaniem zadań transportowych
omówione są, np. w pozycjach: [3] , s.91-104, [5] s. 88-111.
Inne problemy takie jak: degeneracja w zadaniu transportowym, zagadnienie częściowej
i całkowitej blokady tras przewozu oraz zagadnienie transportowe z kryterium czasu znaleźć
można w kursie: Ekonometria – studia II stopnia, a także np. [5] s. 112-137.
Wyszukiwarka
Podobne podstrony:
6 6 Zagadnienie transportowe algorytm transportowy przykład 3
6 6 Zagadnienie transportowe algorytm transportowy przykład 2
6 6 Zagadnienie transportowe algorytm transportowy przykład 1
Prońko, Rafał Zastosowanie klasycznego algorytmu genetycznego do rozwiązania zbilansowanego zagadni
Zagadnienia transportowe z zadaniami, Podstawy logistyki, Transport i spedycja
zagadnienia transpor
BO, Zagadnienia transportowe wyklad4
zagadnieeni transportowe
BO, bo zagadnienie transportowe, Badania operacyjne - wprowadzenie
AM, Zagadnienie przydziału, Zagadnienie transportowe
Zagadnienie transportowe, wsb-gda, Ekonometria
Zagadnienia Transport 2012 obrobione, Transport UTP, semestr 4, Metrologia
Dwuetapowe zagadnienia transportowe MSU, WSL POZNAŃ, Badania operacyjne
więcej podobnych podstron