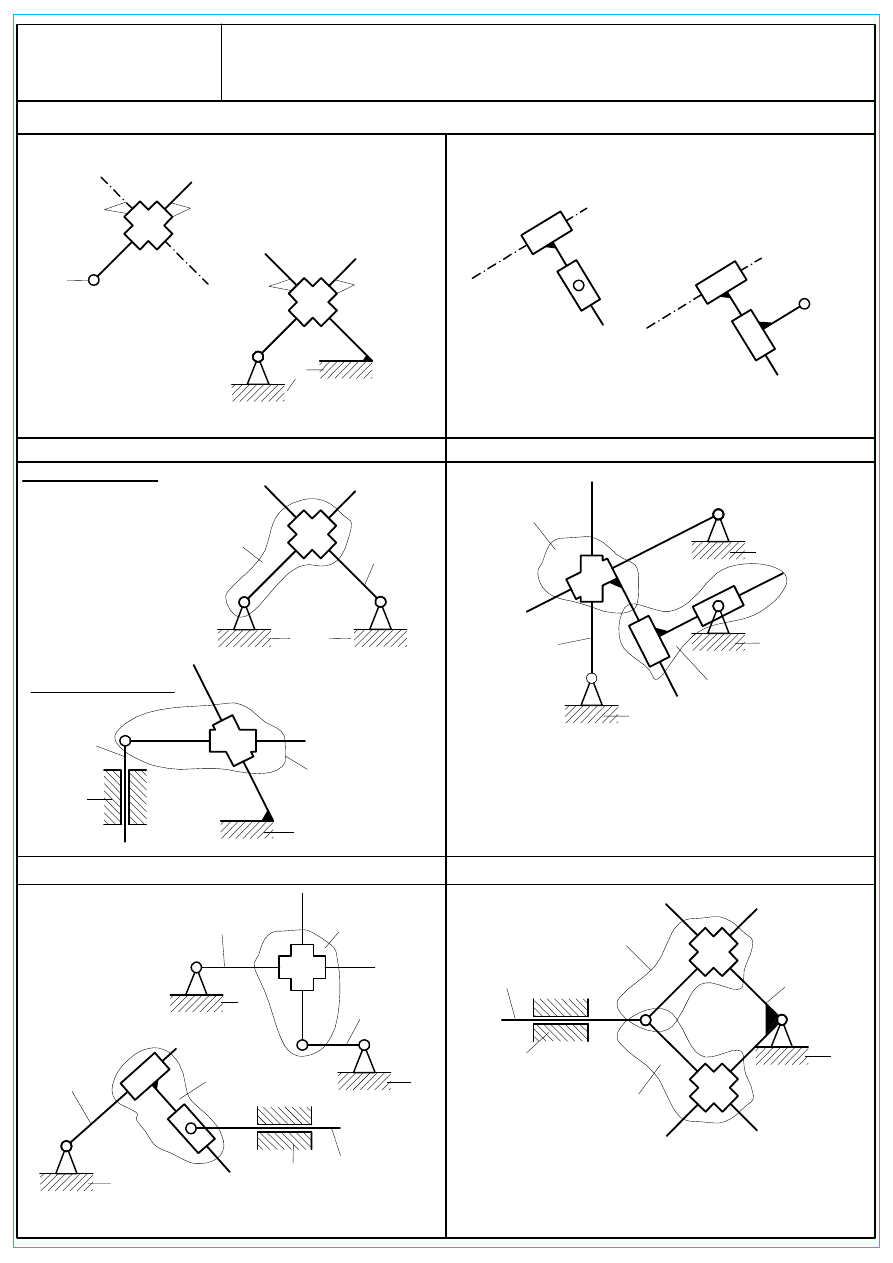
Budowa łańcuchów kinematycznych mechanizmów płaskich
z wykorzystaniem grup strukturalnych klasy 2
0
3
2
2
3
5
5
w
p
n
p
n
w
gr
0-podstawa
Przed przyłączeniem podstawy
Po przyłączeniu
podstawy
Przykłady możliwych wariantów geometrycznych
grupy strukturalnej (P-O-P)
1
0
4
3
2
3
4
5
4
5
w
p
;
p
n
p
p
n
w
Mechanizm Oldhama
Mechanizm złożony jarzmowy o strukturze szeregowej w=1
1
0
7
5
2
3
4
5
4
5
w
p
;
p
n
p
p
n
w
Człon
napędzający
Grupa strukturalna kl. 2
Grupa strukturalna klasy 2 Postać 5 (O-P-P), (P-P-O)
0
2
0
5
4
2
3
4
5
4
5
w
p
;
p
n
p
p
n
w
Grupa
strukturalna kl. 2
Człon
napędzający
Mechanizm suwakowy
Mechanizmy proste klasy 2 o ruchliwości w=1
Człon
napędzający
Mechanizmy proste klasy 2 o ruchliwości w=2
Mechanizm złożony o strukturze równoległej i ruchliwości w=2
2
0
8
6
2
3
4
5
4
5
w
p
;
p
n
p
p
n
w
P
P
Mechanizm składa się z dwóch
grup strukturalnych klasy 2.
Jest to mechanizm klasy 2
Mechanizm składa się z dwóch
grup strukturalnych klasy 2.
Jest to mechanizm klasy 2
O
0
0
Grupa
strukturalna kl. 2
Grupa
strukturalna
kl. 2
0
0
Człon
napędzający
0
Człon
napędzający
Grupa
strukturalna kl. 2
Grupa
strukturalna kl. 2
Człon
napędzający
0
Człon
napędzający
Materiały dydaktyczne TMM
Opracował: J. Felis
P
P
0
Grupa
strukturalna
kl. 2
Człon
napędzający
Człon
napędzający
0
Grupa
strukturalna kl. 2
0
0
P
P
O
P
P
O
O
0
0
O-para obrotowa
P-para postępowa
Wyszukiwarka
Podobne podstrony:
Grupa przestrzenna id 196528 Nieznany
grupa 11 id 441853 Nieznany
Grupa IV id 196513 Nieznany
FIZ GRUPA E POMARANCZOWA id 173 Nieznany
FIZ GRUPA C BLEKITNA id 173210 Nieznany
Grupa M0X2N1 id 196429 Nieznany
Grupa II id 196511 Nieznany
GRUPA IV 2 id 196514 Nieznany
Fizyka Wyniki grupa 11 id 17727 Nieznany
FIZ GRUPA X ZOLTA id 173214 Nieznany
Grupa M0X3N1 id 196430 Nieznany
grupa esd id 196499 Nieznany
Grupa przestrzenna id 196528 Nieznany
grupa 11 id 441853 Nieznany
Grupa IV id 196513 Nieznany
BWCZ Grupa B id 95718 Nieznany
PKM 31052012 Grupa 3 id 359757 Nieznany
PKM 17052012 Grupa 2 id 359738 Nieznany
więcej podobnych podstron