7. ELEMENTY PŁYTOWE
1
7.
7. ELEMENTY PŁYTOWE
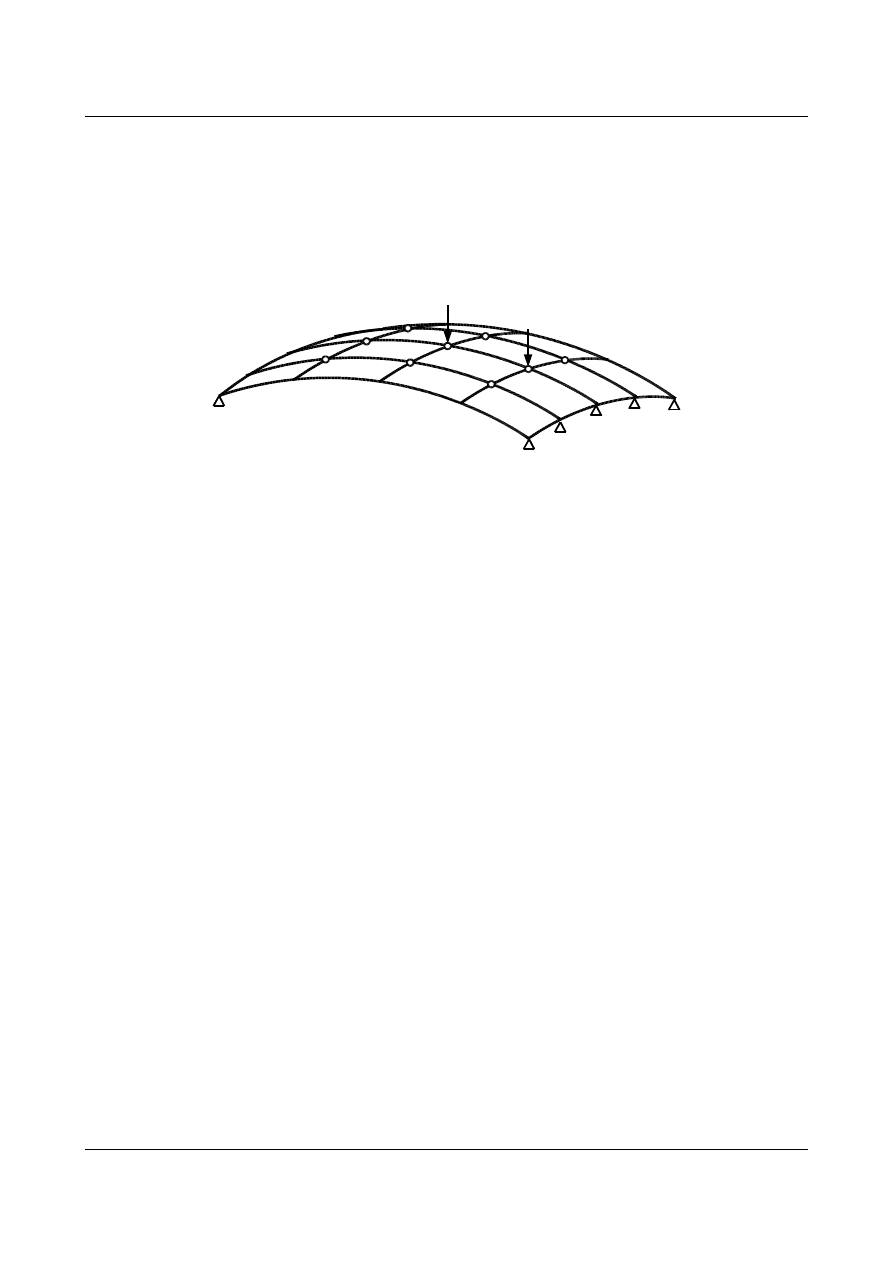
Rys. 7.1. Element płytowy
Aby rozwiązać zadanie płytowe należy:
•
zdefiniować geometrię płyty,
•
dokonać podziału płyty na elementy,
•
zdefiniować węzły,
•
wprowadzić obciążenie,
•
ustalić więzy (warunki brzegowe),
•
wprowadzić odpowiednie funkcje kształtu
{u}=[ N ]⋅{d }
(7.1)
gdzie [N] oznacza przyjmowane funkcje kształtu,
•
zdefinować odkształcenia i naprężenia:
{}=[ B]{d }
{}=[ D]{B}{d }
(7.2)
•
zdefiniować macierz sztywności:
[ K
e
]=
∫
V
B
T
D B dv
(7.3)
(jest to macierz osobliwa),
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
7. ELEMENTY PŁYTOWE
2
•
dokonać transformacji macierzy sztywności (z układów lokalnych do układu globalnego)
[ K
e
G
]
[
K
e
]
(7.4)
•
zagragować macierz sztywności – zapewnia to nierozdzielność przemieszczeń węzłów:
A
K
e
G
[
K
]
(7.5)
gdzie A oznacza operator,
•
postawić problem jako równanie:
[ K ]{D}={P}
(7.6)
[K] – macierz sztywności, będąca na tym etapie nadal osobliwą,
•
wprowadzić warunki brzegowe,
•
rozwiązać równanie:
{D}=[ K ]
−1
⋅{P}
(7.7)
w wyniku którego otrzymujemy szukane przemieszczenia,
•
przetransformować obliczone przemieszczenia do układów lokalnych,
•
odtworzyć interesujące nas stany odkształceń, naprężeń i przemieszczeń.
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
7. ELEMENTY PŁYTOWE
3
7.1. Płyty cienkie
Płyta cienka to obiekt dwuwymiarowy, w którym wymiary w kierunku osi x i y są wielokrotnie
większe niż jego grubość.
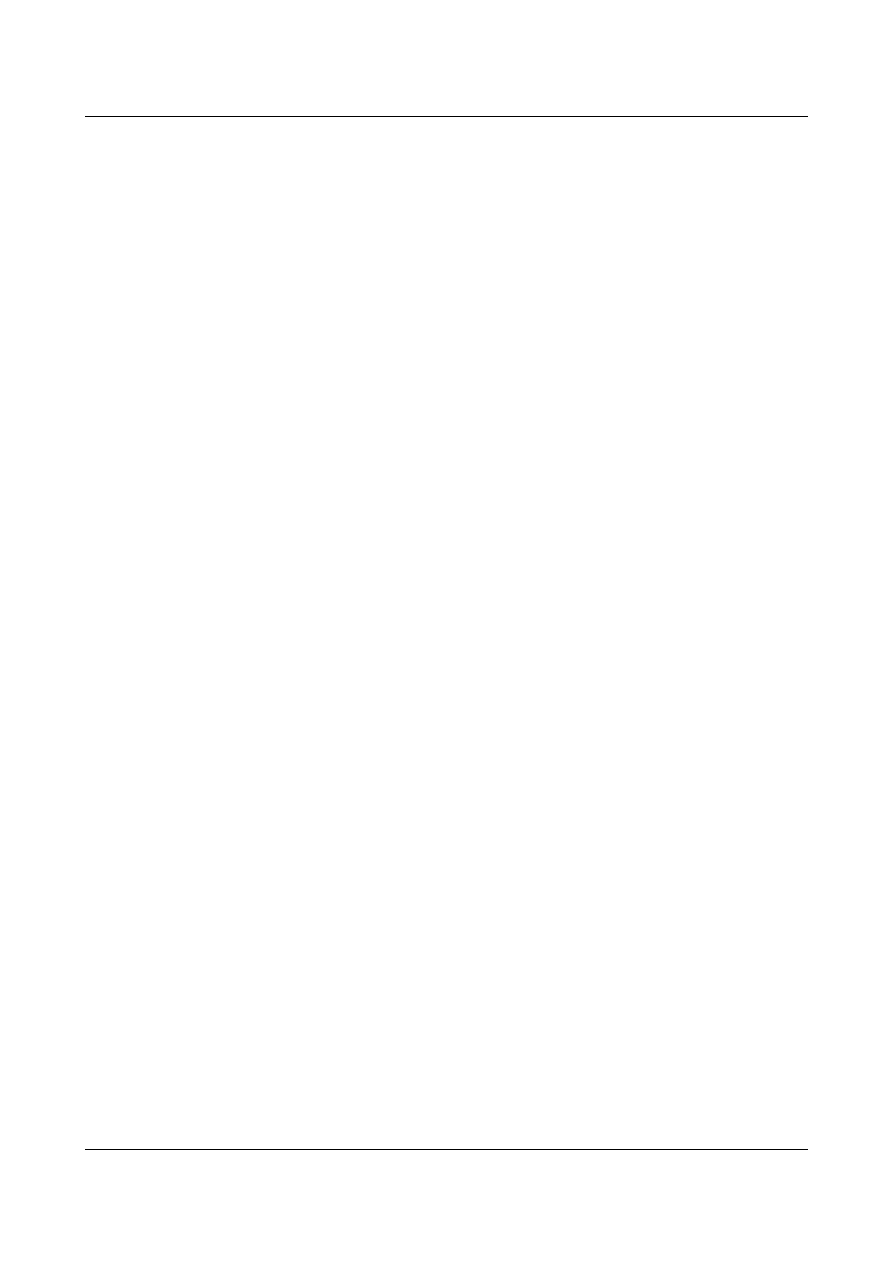
Rys. 7.1. Płyta cienka
Załóżmy, że ugięcia występują w jednym kierunku i mamy dwa kąty obrotu:
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
tego kąta obrotu nie
uwzględniamy
ugięcie (pionowo w dół)
po kierunku z
z
z,w
y,v
x,u
t
2
t
2
z
dz
dx
dy
Q
x
M
x
x
M
x
y
7. ELEMENTY PŁYTOWE
4
Odkształcenia w płaszczyźnie warstwy płyty opisane są wzorami:
x
= ∂
u
∂ x
y
= ∂
v
∂ y
x
= ∂
u
∂ y
∂
v
∂ x
(7.8)
Przemieszczenia dowolnego punktu:
u
=−z ∂
w
∂ x
v
=−z ∂
w
∂ y
(7.9)
gdzie ∂
w
∂ x
jest kątem obrotu. Po podstawieniu wzorów 7.9 do 7.8 otrzymujemy:
x
=−z ∂
2
w
∂ x
2
y
=−z ∂
2
w
∂ y
2
x
=−2 z ∂
2
w
∂ x ∂ y
(7.10)
Zależność między naprężeniami a odkształceniami dla warstwy płyty jest taka sama jak dla płaskiego
stanu naprężenia, mamy więc:
{}=[ D]{}
(7.11)
gdzie
D
=
E
1
−
2
[
1
0
1 0
0 1
]
,
=
1
−
2
(7.12)
Wektor naprężeń uogólnionych odpowiada wartościom momentów zginających:
[
M
]
=
[
M
xx
M
yy
M
xy
]
T
(7.13)
Jeśli
x
=
E
1
−
2
x
y
(7.14)
to uogólnione naprężenie M
xx
wynika z całkowania wyrażenia
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
7. ELEMENTY PŁYTOWE
5
M
xx
=−
∫
−
t
2
t
2
x
⋅z dz=
E
1
−
2
t
3
12
∂
2
w
∂ x
2
∂
2
w
∂ y
2
(7.15)
W podobny sposób uzyskujemy pozostałe składowe wektora uogólnionych naprężeń:
M
yy
=
E
1
−
2
t
3
12
∂
2
w
∂ y
2
∂
2
w
∂ x
2
(7.16)
M
xy
=
E t
3
12
1−
2
∂
2
w
∂ x ∂ y
(7.17)
Wektor uogólnionych odkształceń będzie postaci:
[
]
=
[
xx
yy
xy
]
T
=
[
W
, xx
W
, yy
2 W
, xy
]
T
(7.18)
Wówczas uogólniony operator D dla naprężeń i odkształceń wynosi:
D
=D
t
3
12
(7.19)
A zatem otrzymujemy relację:
[
M
]
=D
[
]
(7.20)
7.2. Rodzaje elementów płytowych
•
niedostosowany element prostokątny, zwany MZC (nie spełnia warunków ciągłości pochodnych na
brzegu elementu). Stopnie swobody są postaci:
[
d
i
]
=
[
w
i
∂ w
i
∂ y
−
∂ w
i
∂ x
]
T
(7.21)
Obciążenie węzłowe wynosi natomiast:
[
p
i
]
=
[
p
zi
M
xi
M
yi
]
T
, gdzie
i
=1, ... ,4
(7.22)
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
7. ELEMENTY PŁYTOWE
6
Funkcja aproksymacyjna będzie postaci:
w
=c
1
c
2
c
3
c
4
2
c
5
c
6
2
c
7
3
c
8
2
c
9
2
c
10
3
c
11
3
c
12
3
(7.23)
Występujące 12 stałych to pełen zestaw z trójkąta Pascala (dla czterech pierwszych wierszy} wraz z
dodatkiem x
3
y oraz xy
3
. Macierz sztywności dla takiego elementu otrzymamy w następującej postaci:
[
K
e
]
=
E t
3
12
1−
2
[
K
1
]
[
K
2
]
[
K
3
]
[
K
4
]
macierz niezależna od przemieszczeńelementów
(7.24)
[K
e
] jest również macierzą niezależną od przemieszczeń elementów, co oznacza, że mamy zadanie
liniowe.
•
dostosowany element prostokątny, zwany BFS. Stopnie swobody są postaci:
[
d
i
]
=
[
[
d
i1
][
d
i2
][
d
i3
][
d
i4
]
]
T
=
[
w
i
∂ w
i
∂ y
−
∂ w
i
∂ x
∂
2
w
i
∂ x ∂ y
]
T
, gdzie
i
=1, ... , 4
(7.25)
Funkcję przemieszczeń opisuje równanie przedstawione poniżej:
przy czym dla czterech stopni swobody ograniczamy się do wyrazów rozwinięcia położonych
powyżej przekątnej.
Przykładowym elementem prostokątnym dostosowanym może być element czterowęzłowy (z węzłami
położonymi w narożnikach). Dla takiego przypadku odpowiednio dobieramy funkcje kształtu (tu z czterema
stopniami swobody). Jeśli stosujemy więcej punktów Gaussa, należy odpowiednio dobrać też funkcje
kształtu.
Z uwagi na długi czas potrzebny na całkowanie funkcji kształtu, korzystniej jest nam przyjąć większą
liczbę stopni swobody z odpowiadającymi prostymi funkcjami kształtu, niż mało punktów stopni swobody a
skomplikowane funkcje kształtu.
J.Gieczewski, M.Kończal, A.Krzysztoń, D.Mejbaum, N.Roszak, M.Wojciechowski, J.Wojtkowiak
AlmaMater
Wyszukiwarka
Podobne podstrony:
instrukcja bhp przy obsludze prasy hydraulicznej do okleinowania elementow plytowych
Kotwy KK do elementow plytowych
07 Elementy niewłaściwe
07 podstawowe elementy
07 Montaż mechaniczny elementów i podzespołów
07 Dobieranie i sprawdzanie elementów elektronicznych
BIOMEDYCZNE PODSTAWY ROZWOJU cw 07, Pedagogika element
w.07-rzeczywiste elementy, Polibuda, Semestr V, Kompatybilnosc Elektromagnetyczna, Wykład
Elementy prawa, 07-prawo
07 Badanie elementów i układów automatyki
07 funkcje elementarne
CE Elementary module 07 web worksheet
07 Lekcja 6 Kilka dodatkowych elementów
07 Rozpoznawanie materiałów i elementów
więcej podobnych podstron