22
INDUKCJA ELEKTROMAGNETYCZNA
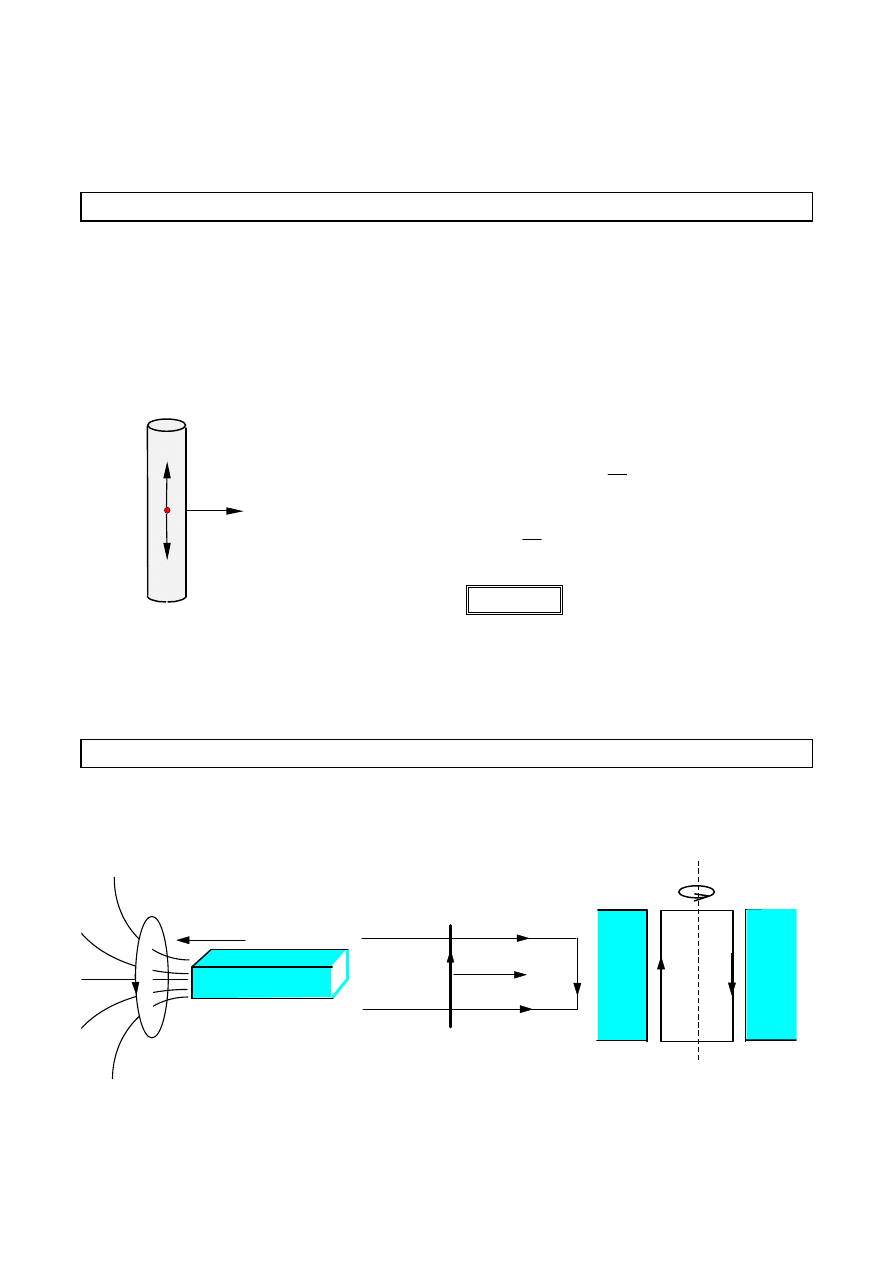
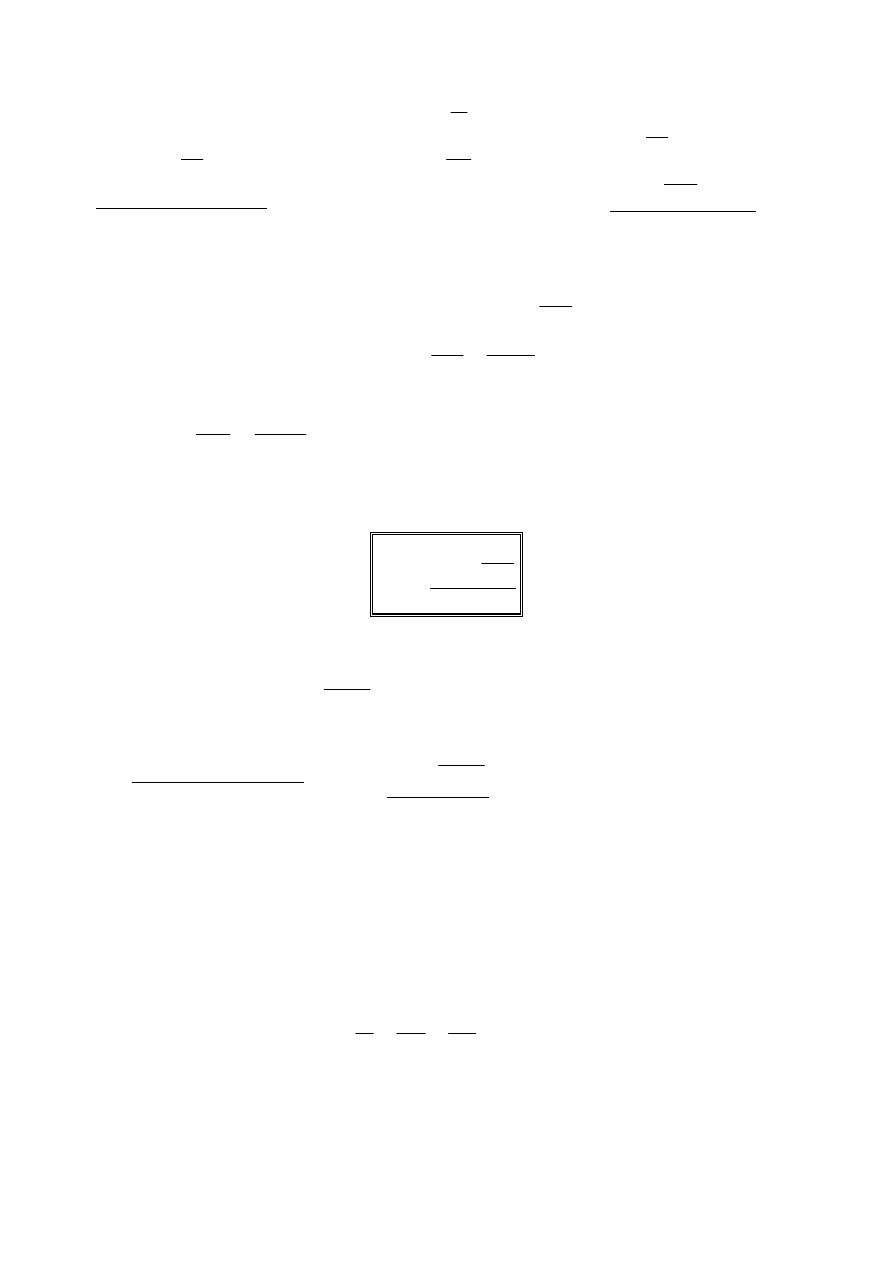
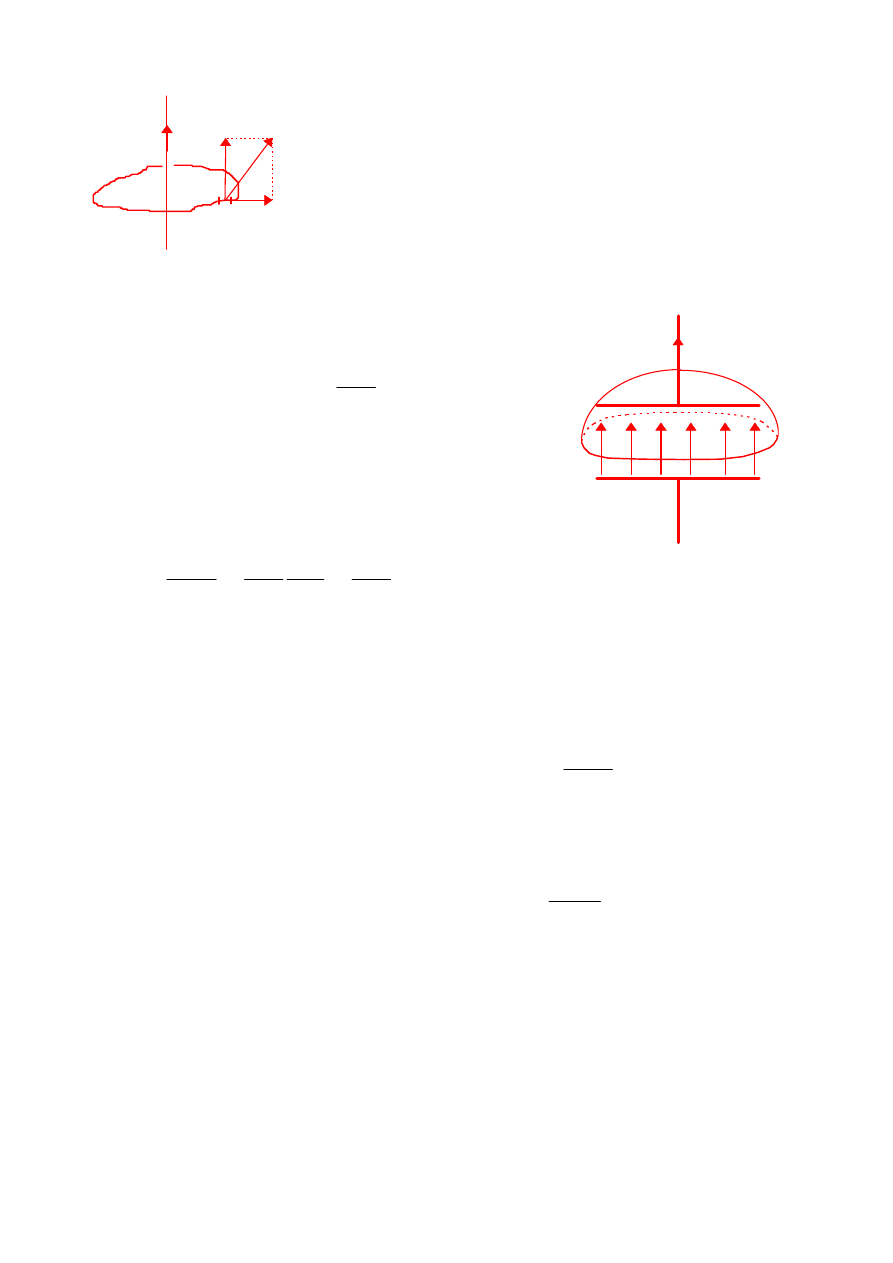
Napięcie na końcach ruchomego przewodnika
Przewodnik o długości l porusza się z prędkością V w jednorodnym polu
magnetycznym o indukcji B. Razem z przewodnikiem poruszają się zawarte w nim
ładunki elektryczne. Na elektrony zawarte w przewodniku działa siła Lorentza, pod
wpływem której przemieszczają się one w kierunku jednego z końców.
Przemieszczanie się elektronów ustaje wtedy gdy siła Lorentza (F
B
) zostaje
zrównoważona przez siłę elektrostatyczną (F
E
).
F
F
BeV
eE
E
U
l
BeV
e
U
l
B
E
====
====
====
====
;
U
BlV
====
Napięcie powstałe na końcach przewodnika poruszającego się w polu magnetycznym
jest zatem efektem oddziaływania pola magnetycznego na ładunki zawarte w tym
przewodniku. Napięcie to może powodować przepływ prądu zwanego indukcyjnym.
Powstawanie prądu indukcyjnego. Reguła Lenza.
Prąd elektryczny może płynąć jedynie w obwodzie zamkniętym. Prąd indukcyjny
płynie w takim obwodzie zamkniętym, gdzie istnieją fragmenty obwodu stanowiące
ź
ródło
napięcia.
Badania
doświadczalne
warunków
powstawania
prądu
indukcyjnego prowadzą do wniosku, że prąd indukcyjny powstaje w takim obwodzie
zamkniętym, przez który przenika zmienny strumień indukcji magnetycznej.
V
r
E
F
r
B
F
r
e
l
+
+
+
+
_
_
_
_
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
⊗
B
r
N
S
∼∼∼∼
B
∼∼∼∼
αααα
∼∼∼∼
S
N
r
V
⊗
⊗
⊗
⊗
r
B
23
Wiadomo, ze zmiany strumienia zachodzą wtedy, gdy zmienia się indukcja
magnetyczna ( B
∼∼∼∼
), pole powierzchni obwodu (S
∼∼∼∼
), lub kąt jaki tworzą linie sił
pola z powierzchnią obwodu (
αααα
∼∼∼∼
). Kierunek prądu indukcyjnego można ustalić
analizując siły działające na ładunki elektryczne, lub posługując się regułą Lenza:
Kierunek prądu indukcyjnego jest zawsze taki, aby przeciwdziałał tej zmianie
strumienia, która go wywołała.
Reguła ta wynika z zasady zachowania energii.
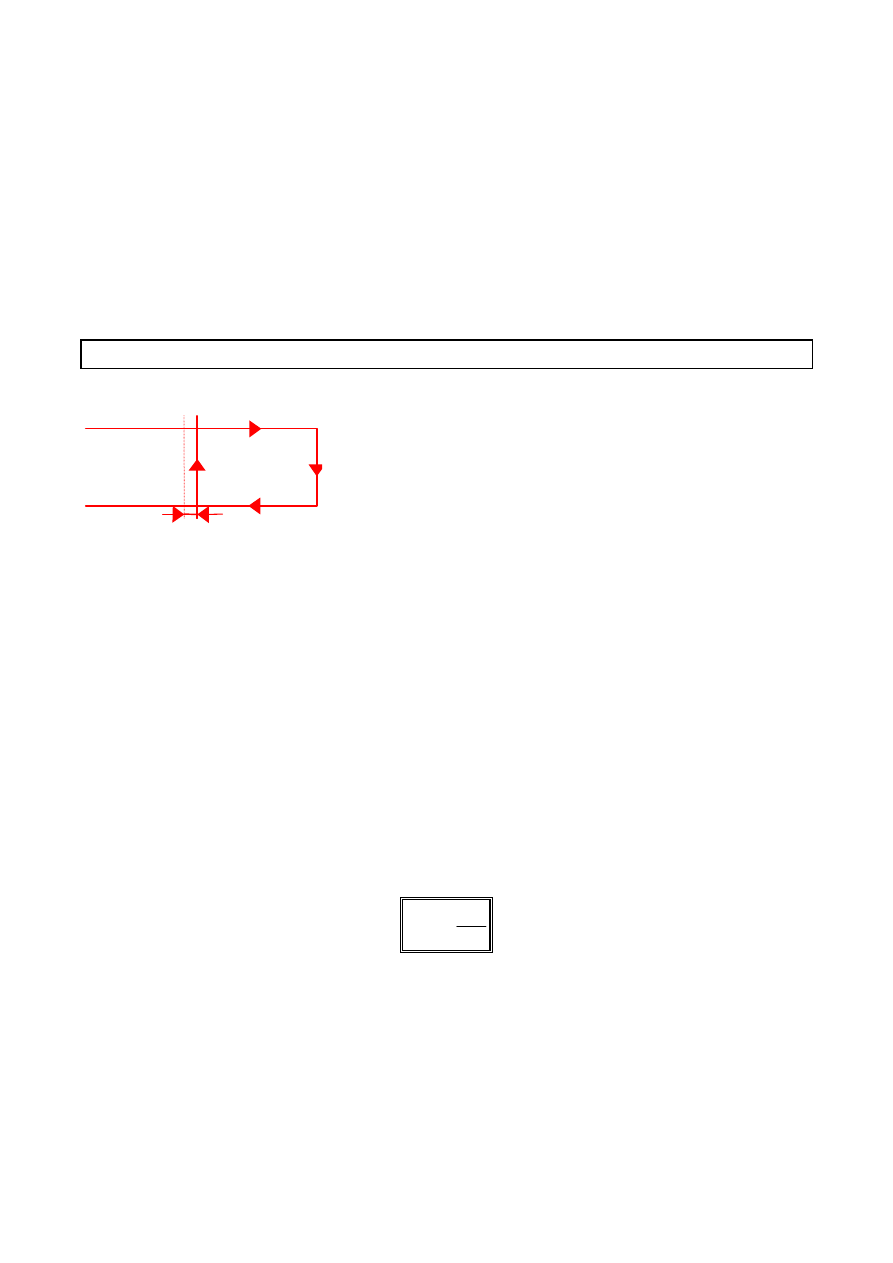
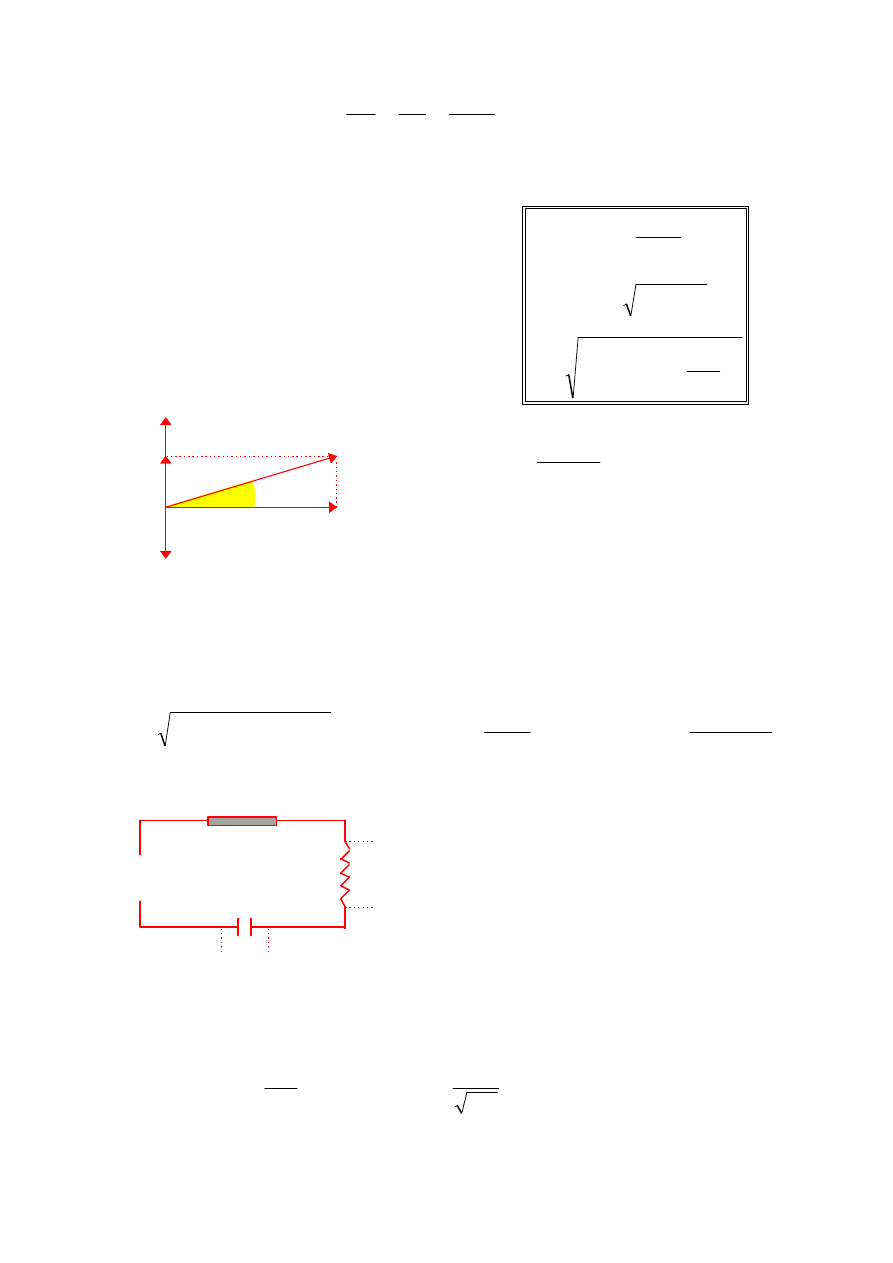
Siła elektromotoryczna indukcji
Napięcie, które powoduje przepływ prądu indukcyjnego nazywamy siłą
elektromotoryczną
indukcji
(SEM).
Przesunięcie
poprzeczki na odcinku dx wymaga pracy elementarnej
równej pracy jaką wykona wzbudzony tym ruchem prąd
indukcyjny.
dW
EIdt
====
E - SEM indukcji
Jeśli siła hamująca ruch poprzeczki (siła elektrodynamiczna) wynosi F, to
otrzymujemy:
−−−−
====
Fdx
EIdt
−−−−
====
BIldx
EIdl
l
.
dx
= dS - zmiana powierzchni obwodu
−−−−
====
BdS
Edt
B
.
dS = d
Φ
Φ
Φ
Φ
- zmiana strumienia indukcji magnetycznej przenikającego przez ramkę
−−−−
====
d
E d t
Φ
Φ
Φ
Φ
E
d
dt
==== −−−− Φ
Φ
Φ
Φ
SEM indukcji jest zatem pochodną strumienia indukcji magnetycznej po czasie.
Powyższa zależność przedstawia związek między dwiema funkcjami ( E i
Φ
Φ
Φ
Φ
). Znając
zależność
Φ
Φ
Φ
Φ
(t) można zatem ustalić zależność E(t). Wartość średnia siły
elektromotorycznej wzbudzonej w czasie
∆∆∆∆
t wynosi:
⊗
⊗
⊗
⊗
B
r
I
dx
l
24
(((( ))))
E
t
==== −−−− ∆Φ
∆Φ
∆Φ
∆Φ
∆∆∆∆
Znak (-) informuje, że napięcie E musi być takie, aby przeszkadzało zmianie
strumienia, która go wywołała.
Prądy wirowe
Jeśli zmienne pole magnetyczne przenika przez dowolny materiał przewodzący prąd
elektryczny, to wewnątrz tego materiału powstają prądy indukcyjne, zwane
wirowymi.
Prądy
wirowe
powodują
nagrzewanie
każdego
przewodnika
umieszczonego
w
zmiennym
polu
magnetycznym. Można je wykorzystywać
do topienia metali w tzw. piecach
indukcyjnych. Są one również przyczyną
strat energii w transformatorze, bowiem
powodują
nagrzewanie
się
rdzenia
transformatora. Straty te można zmniejszyć przez wykonanie rdzenia z cienkich
blaszek co utrudnia przepływ prądów wirowych.
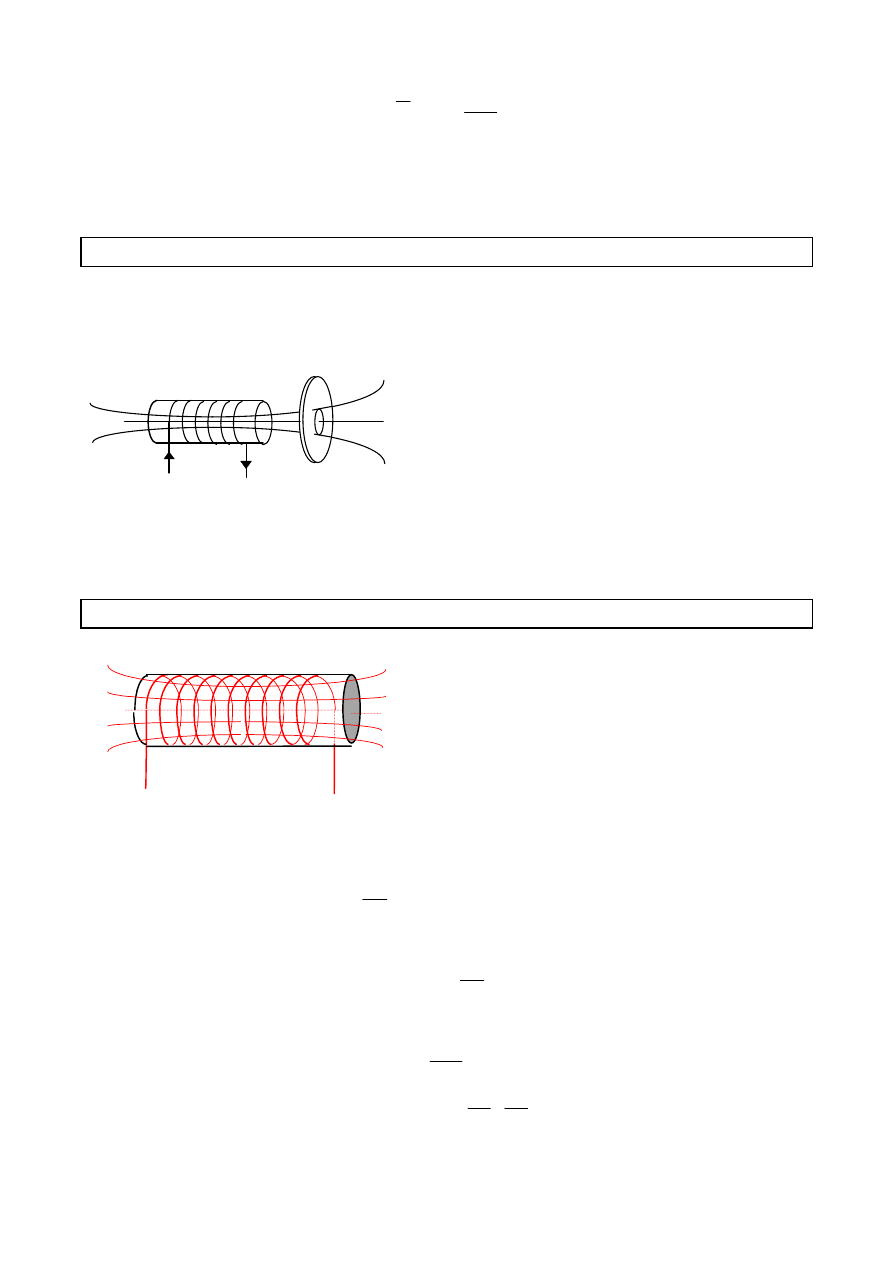
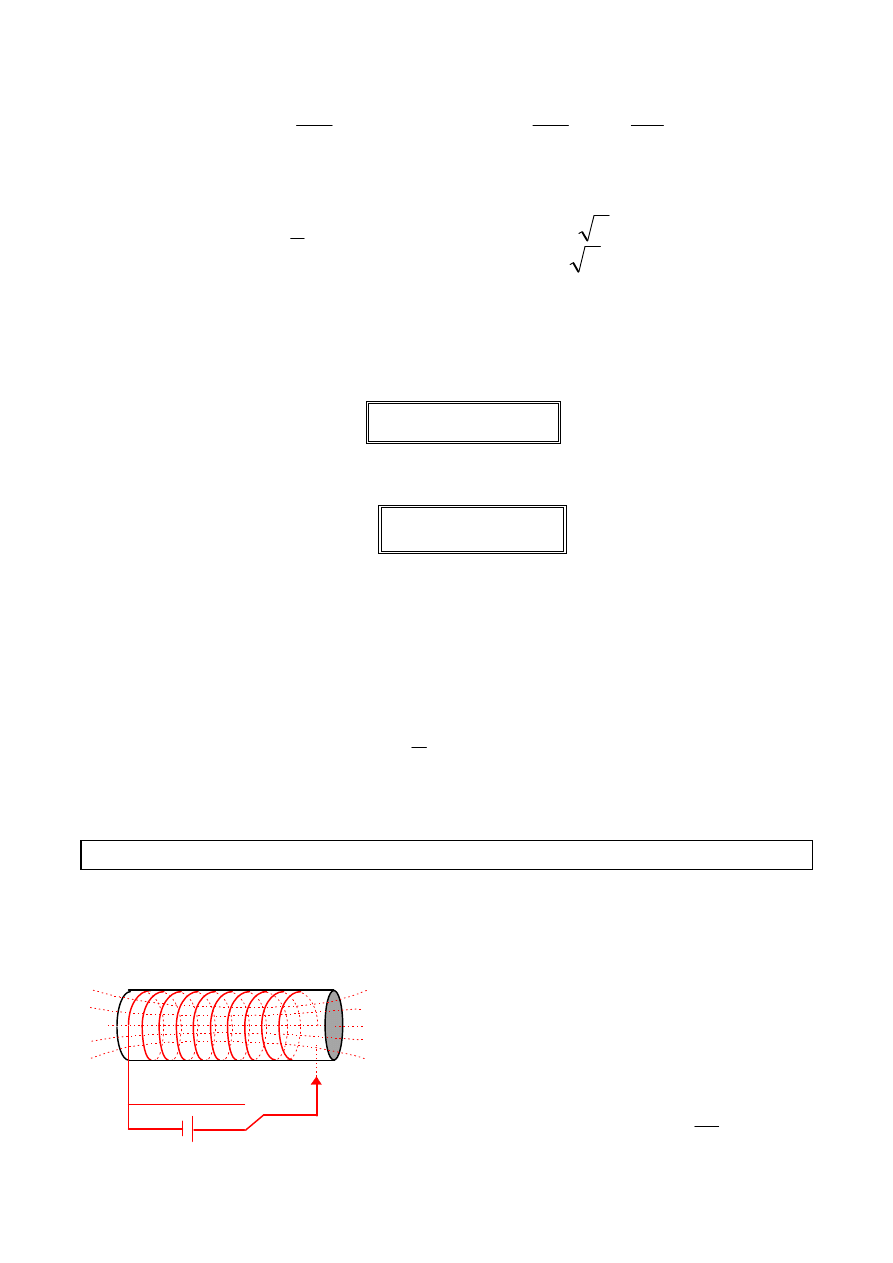
Indukcja własna
Jeśli przez zwojnicę płynie prąd zmienny, to
wewnątrz zwojnicy powstaje zmienne pole
magnetyczne. Pole to powoduje powstanie na
końcach tej zwojnicy wtórnego napięcia
indukcyjnego. Zjawisko to nazywamy indukcją
własną lub samoindukcją.
W
przypadku długiego solenoidu, w którym
płynie prąd o zmiennym natężeniu I, przez każdy zwój tego solenoidu przenika pole
magnetyczne o indukcji:
B
H
nI
l
o
====
====
µµ
µµ
µµ
µµ
µµ
µµ
µµ
µµ
0
Strumień indukcji magnetycznej
przenikający przez każdy zwój wynosi :
Φ
Φ
Φ
Φ ==== µµ
µµ
µµ
µµ
0
nI
l
s
SEM indukcji powstała w jednym zwoju wynosi:
E
d
dt
E
ns
l
dI
dt
1
1
0
==== −−−−
==== −−−−
⋅⋅⋅⋅
Φ
Φ
Φ
Φ
µµ
µµ
µµ
µµ
B
∼∼∼∼
I
∼∼∼∼
B
∼∼∼∼
I
∼∼∼∼
25
SEM indukcji wzbudzona na końcach solenoidu jest n razy większa i wynosi:
E
n s
l
dI
dt
s
o
==== −−−−µµ
µµ
µµ
µµ
2
E
L
dI
dt
s
==== −−−−
Współczynnik L zależy od cech charakterystycznych obwodu i nazywamy go
współczynnikiem
samoindukcji,
współczynnikiem
indukcji
własnej
lub
indukcyjnością obwodu. Dla długiego solenoidu można wyrazić go wzorem:
L
n s
l
o
==== µµ
µµ
µµ
µµ
2
Siła elektromotoryczna samoindukcji jest zatem proporcjonalna do wartości
pochodnej natężenia prądu po czasie. Korzystając z tej zależności
można
ustalić
E
s
(t)
jeśli znana jest zależność I(t).
Ś
rednia wartość SEM samoindukcji wyrażona jest wzorem:
t
I
L
)
(
E
∆∆∆∆
∆∆∆∆
−−−−
====
Jednostką indukcyjności obwodu jest henr (H). Jest to indukcyjność obwodu, w
którym zmiana natężenia prądu o 1A w czasie 1s powoduje powstanie SEM
samoindukcji 1V.
H
Vs
A
====
Indukcja wzajemna
Na wspólnym rdzeniu wykonanym z materiału ferromagnetycznego nawinięte są
dwa uzwojenia liczące n
1
i n
2
zwojów. Przez jedno z nich płynie prąd zmienny
wywołany zmiennym napięciem. Prąd ten wytwarza zmienny strumień indukcji
magnetycznej, który przenika również przez drugie uzwojenie. Na końcach tego
uzwojenia powstaje SEM indukcji E.
26
E
d
dt
n
n I
l
s
E
n n s
l
dI
dt
==== −−−−
====
==== −−−−
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
2
0
1
0
1
2
µµ
µµ
µµ
µµ
µµ
µµ
µµ
µµ
E
L
dI
dt
==== −−−−
1 2
,
L
1,2
- współczynnik indukcji wzajemnej obwodu.
Pr
ą
dnica pr
ą
du zmiennego
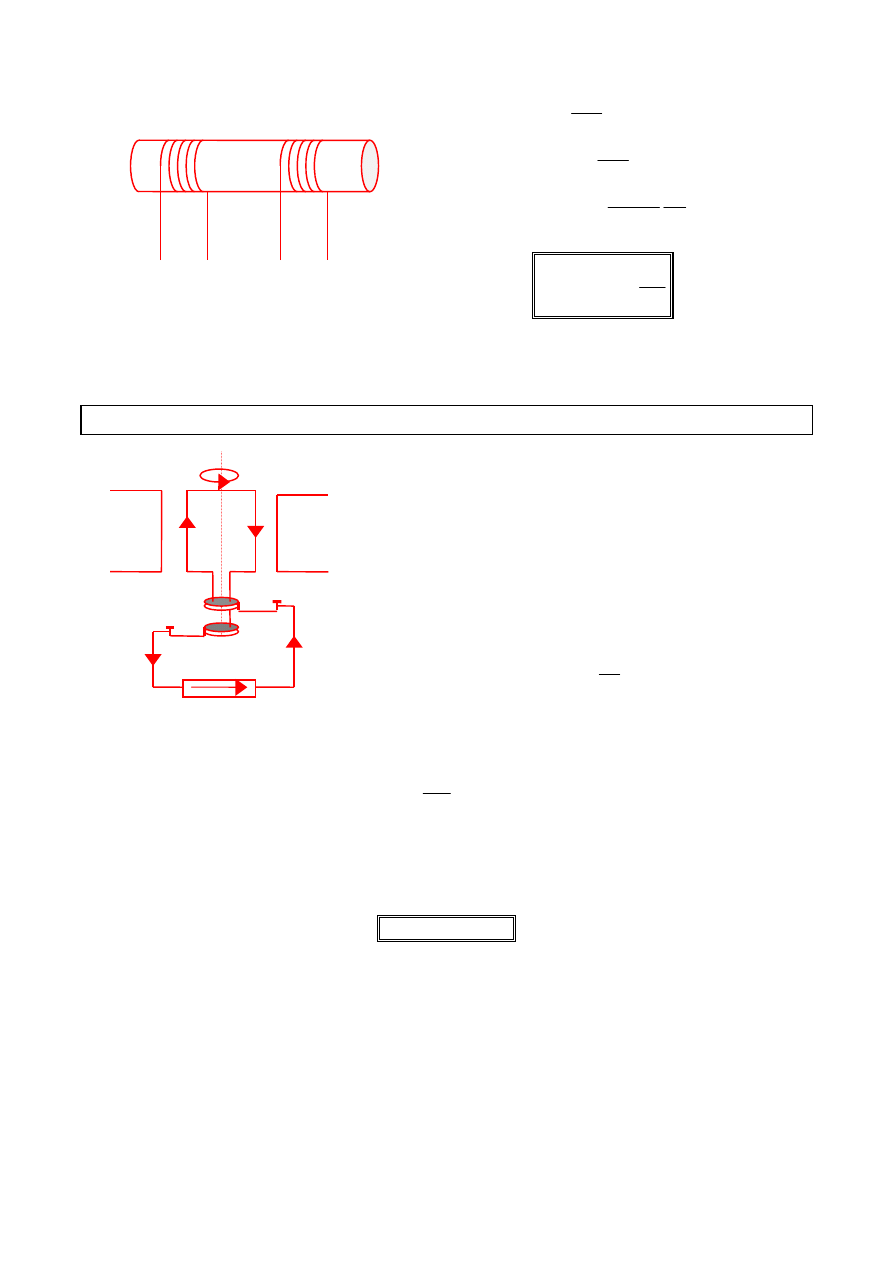
Najprostszą prądnicę prądu zmiennego stanowi płaska
ramka o powierzchni
S
wirująca ze stałą prędkością
kątową
ω
ω
ω
ω
w jednorodnym polu magnetycznym o
indukcji
B
. Końce ramki połączone są z pierścieniami,
po których ślizgają się tzw. szczotki. Strumień indukcji
magnetycznej przenikający przez powierzchnię ramki
zmienia się w czasie.
Φ
Φ
Φ
Φ ====
BS cos
αααα
ω
ω
ω
ω
αααα
αααα
ω
ω
ω
ω
====
⇒
⇒
⇒
⇒
====
t
t
Φ
Φ
Φ
Φ ====
BS
t
cos
ω
ω
ω
ω
SEM indukcji wzbudzona w wirującej ramce jest funkcją czasu i wynosi:
t
sin
BS
E
dt
d
E
1
1
ω
ω
ω
ω
ω
ω
ω
ω
====
Φ
Φ
Φ
Φ
−−−−
====
Jeśli ramka liczy n zwojów, to wzbudzona w niej SEM indukcji jest
n
razy większa i
wynosi:
E
nBS
t
====
ω
ω
ω
ω
ω
ω
ω
ω
sin
E = E
o
sin
ω
ω
ω
ω
t ; E
o
= nBS
ω
ω
ω
ω
ΕΕΕΕ
0000
−
maksymalna wartość SEM indukcji (amplituda SEM indukcji).
ω
ω
ω
ω
R
∅
∅
∅
∅
∼∼∼∼
∅
∅
∅
∅
∅
∅
∅
∅
∼∼∼∼
∅
∅
∅
∅
I
∼∼∼∼
n
2
n
1
l
S
Ν
Ν
Ν
Ν
27
Napi
ę
cie skuteczne i nat
ęż
enie skuteczne
Przez dwa identyczne opory R płyną dwa prądy: pewien prąd zmienny i prąd stały o
natężeniu I
s
, wywołany napięciem U
s
. Prąd zmienny w ciągu okresu wykonuje pracę
W
T
.
Jeśli prąd stały płynąc równie długo przez taki sam opór wykonuje taką samą pracę,
to I
s
i U
s
nazywamy odpowiednio natężeniem skutecznym i napięciem skutecznym
danego prądu zmiennego.
W
I RT
T
s
====
2
W
U
R
T
T
s
====
2
Aby określić natężenie i napięcie skuteczne prądu zmiennego trzeba znać pracę
wykonaną przez dany prąd zmienny w ciągu okresu.
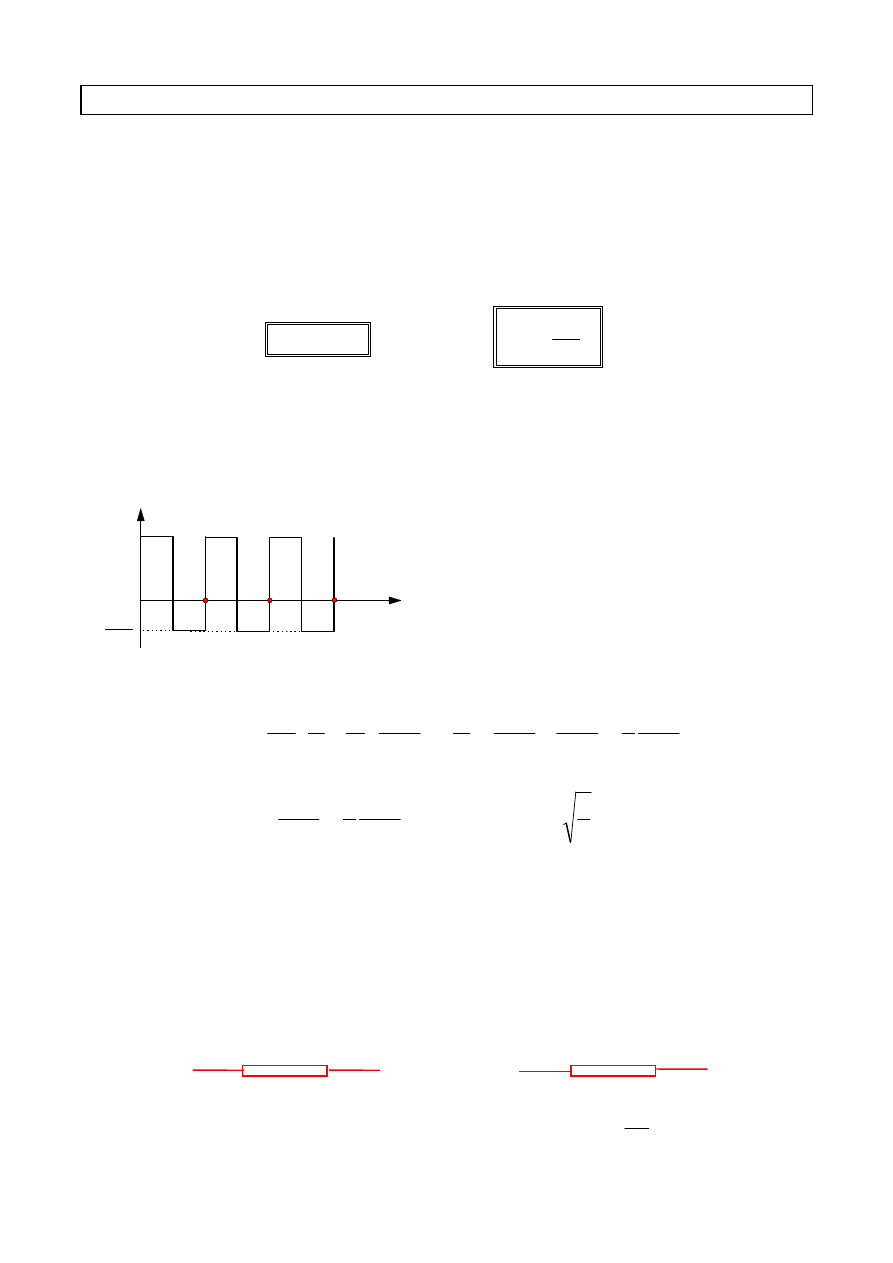
1. Obliczanie napięcia skutecznego w przypadku impulsów prostokątnych.
W
przypadku
prostokątnych
impulsów
napięciowych istnieje możliwość obliczenia
pracy prądu zmiennego w ciągu okresu
sumując prace wykonane przez ten prąd w
poszczególnych
przedziałach
czasowych,
ponieważ płynie on wtedy pod wpływem
stałego napięcia.
W
U
R
T
R
U
T
U T
R
U T
R
U T
R
T
====
⋅⋅⋅⋅ ++++
−−−−
⋅⋅⋅⋅ ====
++++
====
0
2
0
2
0
2
0
2
0
2
2
1
2
2
2
8
5
8
U T
R
U T
R
U
U
s
s
2
0
2
0
5
8
5
8
====
⇒
⇒
⇒
⇒
====
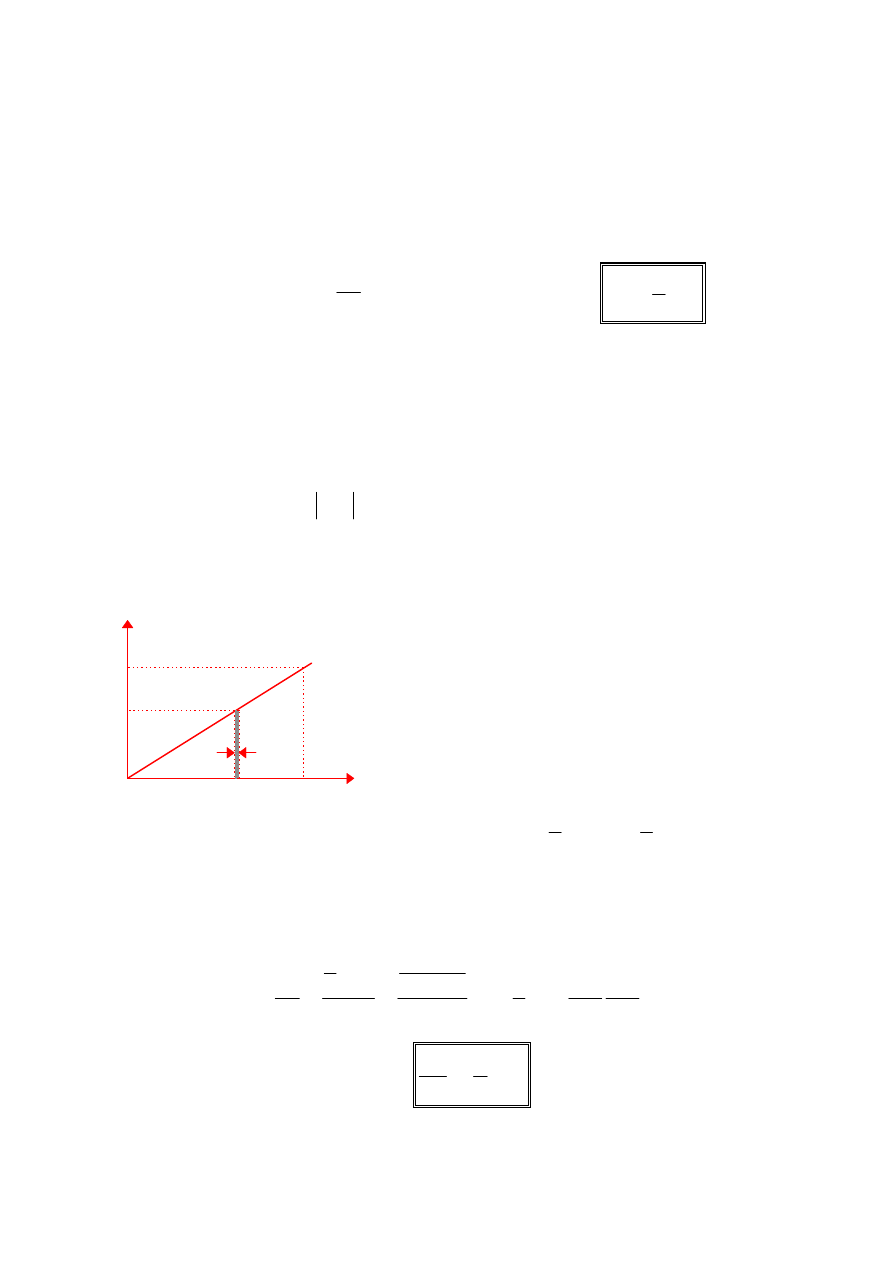
2. Obliczanie napięcia skutecznego, gdy znana jest zależność mocy od czasu
Łatwo można wykazać, że pole figury zawartej pod wykresem mocy w funkcji czasu
jest miarą wykonanej pracy.
R
U
s
I
s
R
W
T
I RT
U
R
T
s
s
2
2
====
−−−−
U
0
2
T
U
0
t
U
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
28
Z definicji mocy wynika, że miarą pracy
elementarnej jest pole wąskiego prostokąta
zawartego pod wykresem mocy w funkcji
czasu:
P
dW
dt
dW
P dt
dS
====
⇒
⇒
⇒
⇒
==== ⋅⋅⋅⋅
−−−−
Praca
wykonana
w
dowolnie
długim
przedziale
czasu
jest
sumą
prac
elementarnych i odpowiada jej pole figury
zawartej pod wykresem mocy w funkcji czasu. Pozwala to na łatwe obliczenie pracy
wykonanej przez prąd zmienny, w przypadku gdy figura pd wykresem mocy jest
figurą regularną.
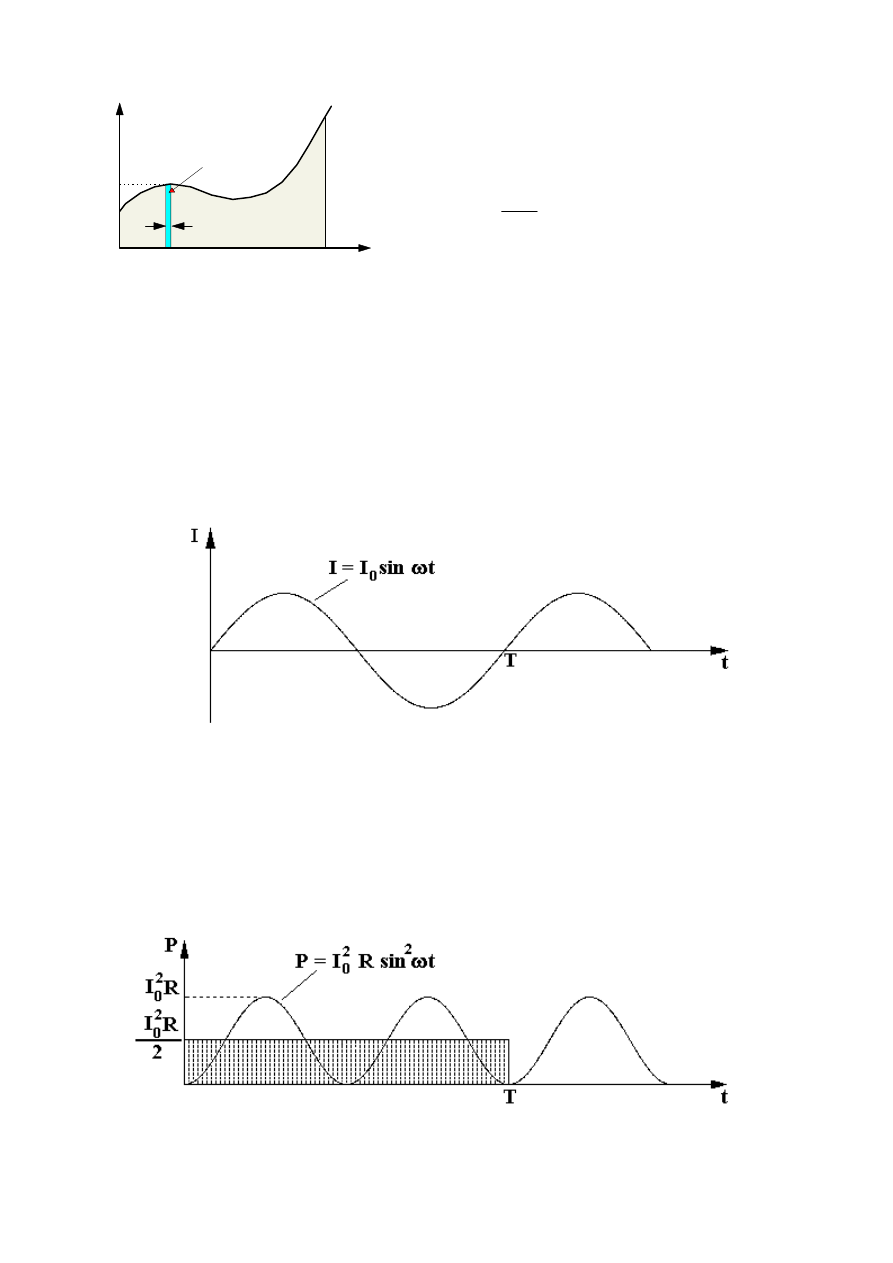
3. Natężenie skuteczne prądu sinusoidalnego
Przypuśćmy, że przez opór
R
płynie prąd zmienny wywołany o natężeniu:
I = I
0
sin
ω
ω
ω
ω
t
Moc prądu sinusoidalnego jest funkcją czasu i wynosi:
P
I R
I R
t
====
====
2
0
2
2
s i n
ω
ω
ω
ω
Zależność
P(t)
przedstawia poniższy wykres.
dS
dt
t
P
P
29
Praca wykonana przez ten prąd w ciągu okresu stanowi sumę prac elementarnych i
odpowiada jej pole figury pod wykresem. Pole to jest równe polu prostokąta o
podstawie
T
i wysokości
I R
0
2
2
. Praca prądu zmiennego wykonana w ciągu okresu
wynosi zatem:
W
I R
T
T
====
0
2
2
I RT
I R
T
I
I
s
s
2
0
2
0
2
2
====
⇒
⇒
⇒
⇒
====
Analogicznie można wykazać, że napięcie skuteczne takiego prądu wynosi:
U
U
s
====
0
2
Używając wartości skutecznych napięcia i natężenia, pracę prądu zmiennego
płynącego przez opór R można obliczać identycznie jak pracę prądu stałego.
Przyrządy pomiarowe prądu zmiennego mierzą wartości skuteczne napięcia i
natężenia.
Indukcyjność i pojemność w obwodzie prądu zmiennego
Kondensator stanowi przerwę w obwodzie prądu stałego, ale umieszczony w
obwodzie prądu zmiennego musi ustawicznie zmieniać swój ładunek, co umożliwia
przepływ prądu w tym obwodzie. Rozważamy
obwód złożony z połączonych ze sobą szeregowo
trzech elementów: oporu R, kondensatora C i
zwojnicy L. Taki obwód jest nazywany
obwodem RLC. Przyjmijmy, że w tym obwodzie
płynie prąd zmienny, sinusoidalny o natężeniu :
I = I
0
sin
ω
ω
ω
ω
t
, gdzie
ω
ω
ω
ω
t
- faza natężenia.
Prąd taki jest wywołany napięciem zewnętrznym (U), oraz napięciami wtórnymi
powstałymi na końcach zwojnicy (U
L
) i na okładkach kondensatora (U
C
). O
natężeniu prądu płynącego przez opór R decyduje suma tych napięć. Korzystając z
prawa Ohma otrzymujemy:
I
U
U
U
R
L
C
====
++++
++++
U
R
R
U
∅
∅
∅
∅
U
L
L
∅
∅
∅
∅
U
C
C
30
I
I
t;
U
L
dI
dt
U
LI
t
L
L
====
==== −−−−
==== −−−−
0
0
sin
sin
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
U
q
C
I
dq
dt
I
I
t
C
====
==== −−−−
====
0
sin
ω
ω
ω
ω
q
I
t
U
I
C
t
C
====
====
0
0
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
cos
cos
IR
U
U
U
L
C
==== ++++
++++
U
I R
t
LI
t
I
C
t
U
I R
t
L
R
RC
t
====
++++
−−−−
====
++++
−−−−
0
0
0
0
1
sin
cos
cos
sin
cos
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
Wyrażenie
L
R
RC
ω
ω
ω
ω
ω
ω
ω
ω
−−−−
1
jest liczbą pozbawioną wymiaru. Każdej liczbie
rzeczywistej można przypisać kąt
ϕϕϕϕ,
o tak dobranej wartości aby było spełnione
równanie:
tg
L
C
R
ϕϕϕϕ
ω
ω
ω
ω
ω
ω
ω
ω
====
−−−−
1
((((
))))
((((
))))
U
I R
t
tg
t
U
I R
t
t
====
++++
====
++++
0
0
sin
cos
cos
sin
cos
sin
cos
ω
ω
ω
ω
ϕϕϕϕ
ω
ω
ω
ω
ϕϕϕϕ
ω
ω
ω
ω
ϕϕϕϕ
ϕϕϕϕ
ω
ω
ω
ω
U
U
t
====
++++
0
sin(
)
ω
ω
ω
ω
ϕϕϕϕ
U
I R
0
0
====
cos
ϕϕϕϕ
ω
ω
ω
ω
t +
ϕϕϕϕ
- faza napięcia
Z powyższych rozważań wynika, że przyczyną prądu o natężeniu I = I
0
sin
ω
ω
ω
ω
t
jest
napięcie U = U
0
sin (
ω
ω
ω
ω
t +
ϕ)
ϕ)
ϕ)
ϕ)
. Napięcie to jest przesunięte w fazie. Kąt
ϕϕϕϕ
nazywamy
przesunięciem fazowym (przesunięcie fazy napięcia względem fazy natężenia).
Jeśli prąd zmienny płynie przez opór R, to stosunek chwilowej wartości napięcia do
chwilowej wartości natężenia jest równy stosunkowi odpowiednich wartości
maksymalnych, jak również stosunkowi odpowiednich wartości skutecznych:
U
I
U
I
U
I
R
s
s
====
====
====
0
0
Jeśli prąd zmienny płynie przez obwód
RLC
, to stosunek wartości maksymalnych
napięcia i natężenia jest większy od oporu omowego i wynosi:
31
U
I
U
I
R
Z
s
s
0
0
====
====
====
cos
ϕϕϕϕ
Stosunek ten nazywamy zawadą obwodu (impedancją obwodu).
Z
R
Z
R
tg
Z
R
L
C
====
====
++++
====
++++
−−−−
cos
ϕϕϕϕ
ϕϕϕϕ
ω
ω
ω
ω
ω
ω
ω
ω
1
1
2
2
2
sin
cos
cos
2
2
2
2
1
1
1
ϕϕϕϕ
ϕϕϕϕ
ϕϕϕϕ
ϕϕϕϕ
++++
====
++++ ====
tg
L
ω =
ω =
ω =
ω =
R
L
- opór indukcyjny (induktancja)
1/C
ω
ω
ω
ω
= R
C
- opór pojemnościowy (kapacytancja)
R
L
- R
C
- opór bierny (reaktancja)
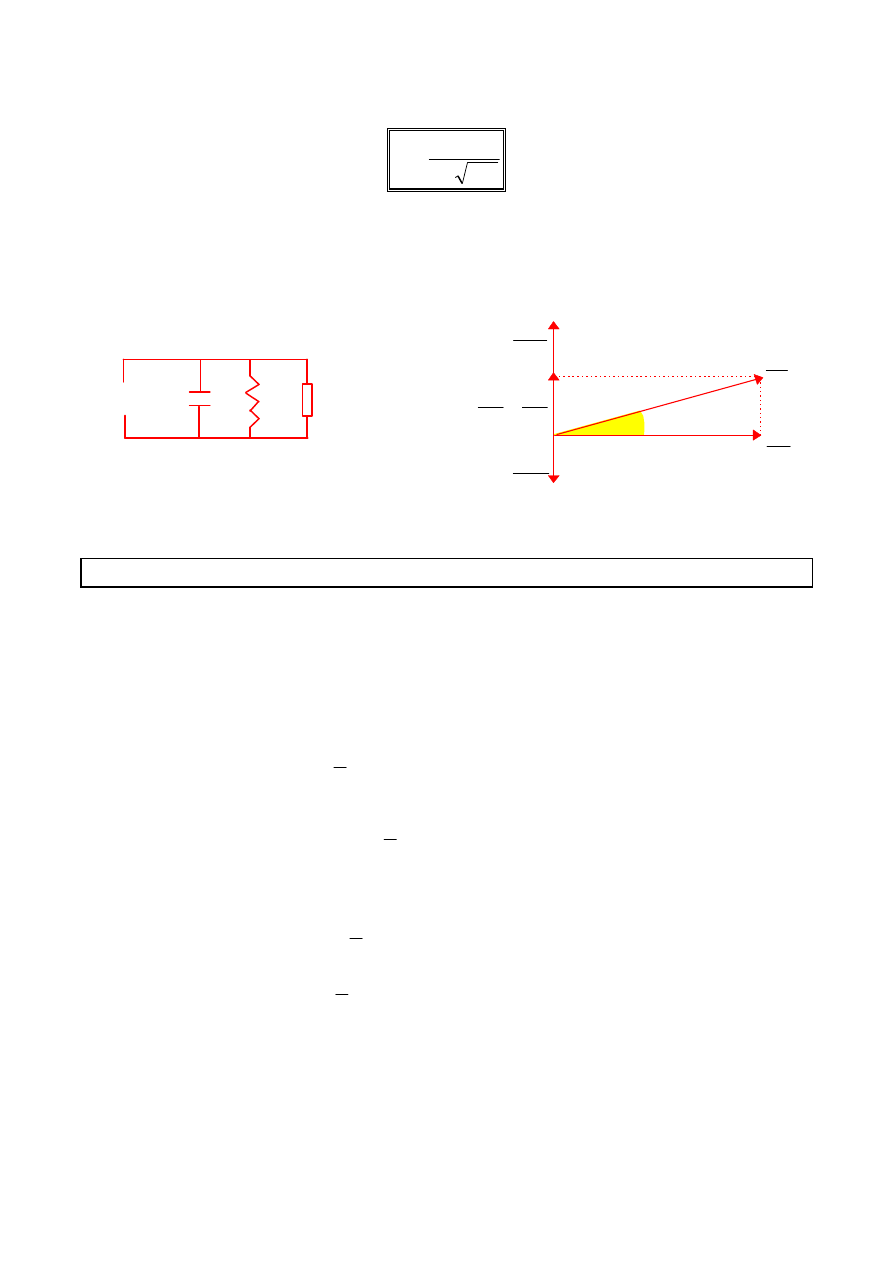
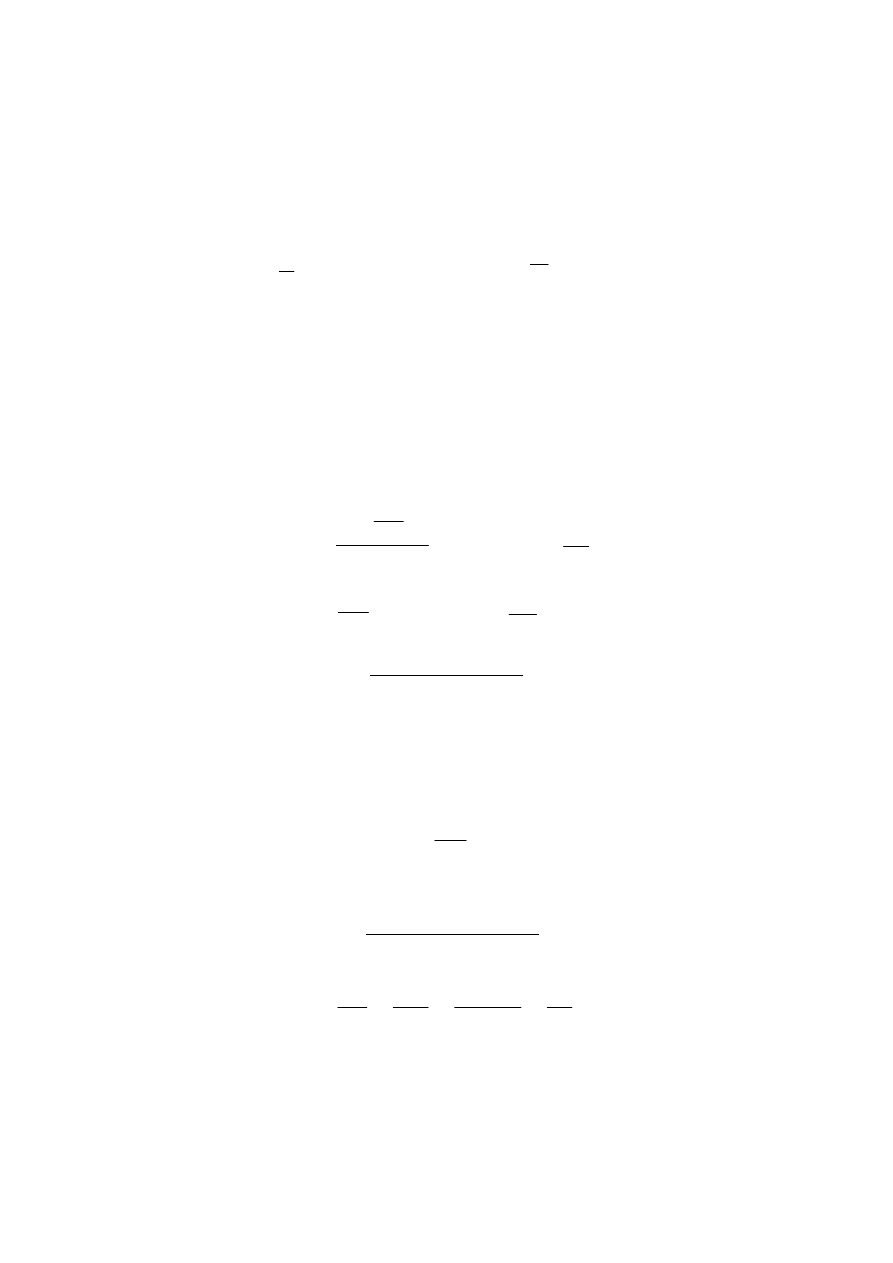
Związki między wielkościami charakteryzującymi obwód RLC, dla elementów
połączonych szeregowo można odtworzyć posługując się tzw. wykresem
wskazowym.
((((
))))
Z
R
R
R
L
C
====
++++
−−−−
2
2
Z
R
====
cos
ϕϕϕϕ
tg
R
R
R
L
C
ϕϕϕϕ ====
−−−−
Pomiędzy napięciami na poszczególnych
elementach obwodu zachodzą następujące
związki:
((((
))))
U
U
U
U
R
L
C
2
2
2
====
++++
−−−−
Istnieje
możliwość
dobrania
takiej
częstotliwości prądu płynącego przez obwód
RLC
, aby w obwodzie nie wystąpiło
przesunięcie fazowe.
ϕϕϕϕ
ω
ω
ω
ω
ω
ω
ω
ω
==== ⇔
⇔
⇔
⇔
====
0
1
L
C
ω
ω
ω
ω ====
1
LC
ω
ω
ω
ω
πν
πν
πν
πν
====
2
R
L
R
L
-R
C
Z
R
ϕϕϕϕ
R
C
U
R
R
U
∅
∅
∅
∅
U
L
L
∅
∅
∅
∅
U
C
C
32
νννν
ππππ
====
1
2
LC
Tak określona częstotliwość prądu jest nazywana częstotliwością rezonansową.
Dla elementów
RLC
połączonych równolegle zachodzą związki, które można
odtworzyć z następującego wykresu wskazowego:
Praca i moc pr
ą
du zmiennego
Przyjmijmy, że w obwodzie płynie prąd zmienny o natężeniu
I = I
0
sin
ω
ω
ω
ω
t
wywołany napięciem
U = U
0
sin (
ω
ω
ω
ω
t+
ϕϕϕϕ).
Praca elementarna wykonana przez taki
prąd wciągu okresu wynosi:
((((
))))
((((
))))
[[[[
]]]]
dW
UIdt
U I
t
t
dt
dW
U I
t
dt
====
====
++++
====
−−−−
++++
0
0
0
0
1
2
2
sin
sin
cos
cos
ω
ω
ω
ω
ω
ω
ω
ω ϕϕϕϕ
ϕϕϕϕ
ω
ω
ω
ω ϕϕϕϕ
((((
))))
((((
))))
[[[[
]]]]
sin
sin
cos
cos
αααα
ββββ
αααα ββββ
αααα ββββ
====
−−−−
−−−−
++++
1
2
Praca wykonana przez taki prąd w ciągu okresu stanowi sumę prac elementarnych i
wynosi:
((((
))))
[[[[
]]]]
((((
))))
W
cos
cos
cos
cos
T
====
−−−−
++++
====
−−−−
++++
∫∫∫∫
∫∫∫∫
∫∫∫∫
1
2
2
1
2
2
0
0
0
0
0
0
0
U I
t
dt
W
U I
dt
t
dt
T
T
ϕϕϕϕ
ω
ω
ω
ω ϕϕϕϕ
ϕϕϕϕ
ω
ω
ω
ω ϕϕϕϕ
cos
cos
cos
ϕϕϕϕ
ϕϕϕϕ
ϕϕϕϕ
dt
dt
T
T
T
0
0
∫∫∫∫
∫∫∫∫
====
====
ϕϕϕϕ
1
R
C
1
1
R
R
L
C
−−−−
1
R
L
1
Z
1
R
U C
L R
∅
∅
∅
∅
∅
∅
∅
∅
33
[[[[
]]]]
cos(
)
sin(
)
sin
sin
2
1
2
2
1
2
4
0
0
0
ω
ω
ω
ω
ϕϕϕϕ
ω
ω
ω
ω
ω
ω
ω
ω ϕϕϕϕ
ω
ω
ω
ω
ππππ
ϕϕϕϕ
ϕϕϕϕ
t
dt
t
T
T
T
T
++++
====
++++
====
++++
−−−−
====
∫∫∫∫
W
U I T
W
U I T
s
s
====
====
1
2
0
0
cos
cos
ϕϕϕϕ
ϕϕϕϕ
U
U
I
I
s
s
0
0
2
2
====
====
Można uważać, że każdy przedział czasu stanowi wielokrotność okresu. Wynika
stąd, że praca prądu zmiennego wykonana w dowolnym czasie t wynosi:
W
U I t
S S
====
cos
ϕϕϕϕ
Moc prądu zmiennego wynosi:
P
U I
S S
====
cos
ϕϕϕϕ
Jeśli w obwodzie nie powstaje przesunięcie fazowe, to wzory na pracę i moc prądu
zmiennego nie różnią się od wzorów na pracę i moc prądu stałego.
W przypadku nieuwzględnienia przesunięcia fazowego otrzymujemy tzw. pracę
pozorną, względnie moc pozorną prądu zmiennego. Dla odróżnienia jej od pracy czy
mocy rzeczywistej, pracę pozorną wyrażamy w woltoamperosekundach, a moc
pozorną - w woltoamperach.
Jeśli przesunięcie fazowe jest bliskie
ππππ
2
to moc takiego prądu jest równa zeru. Prąd
taki nazywamy bezwatowym.
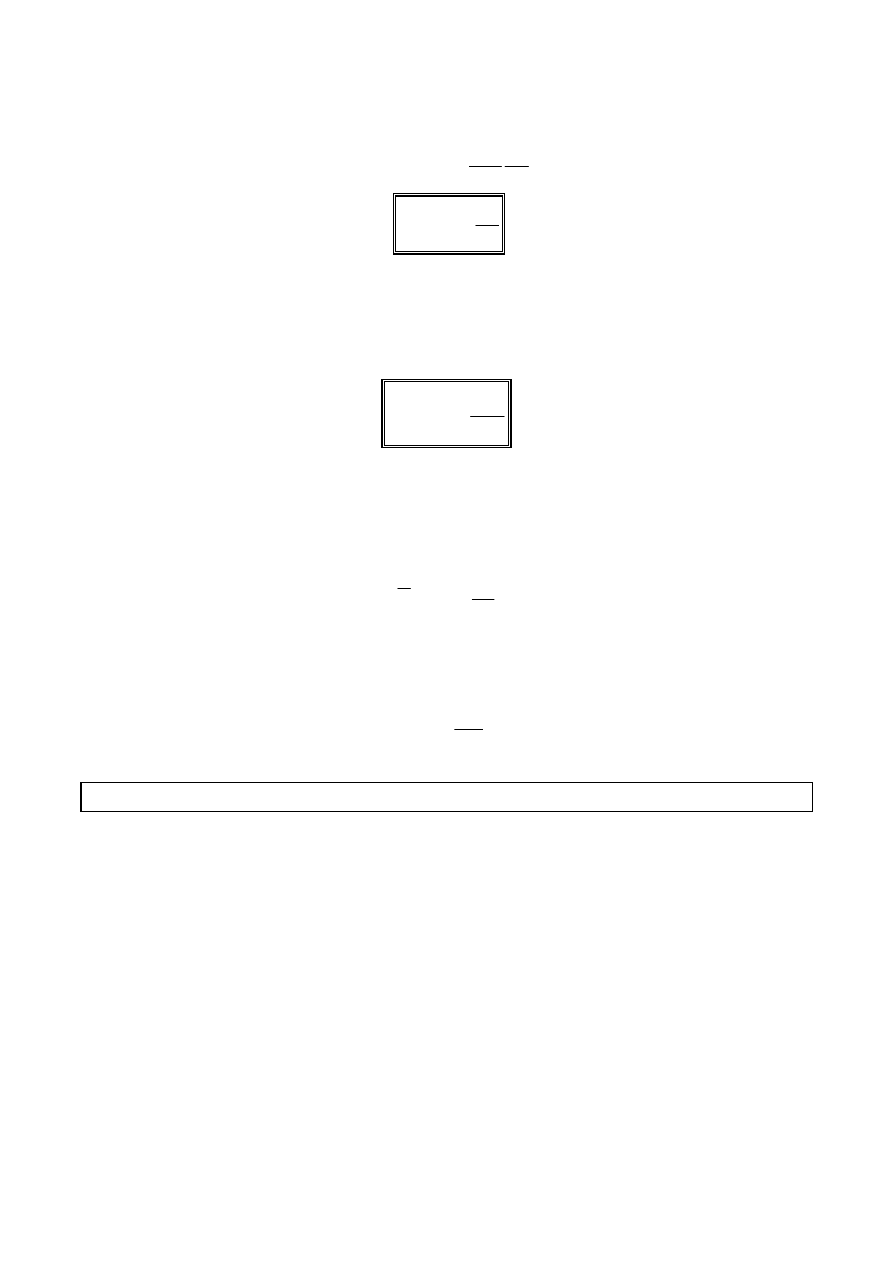
Energia pola magnetycznego
Przez zwojnicę
o indukcyjności L płynie prąd stały o natężeniu I
0
. W wyniku
przerwania obwodu i ponownego połączenia jego końców pole magnetyczne zanika.
W obwodzie płynie prąd indukcyjny, a energia
pola magnetycznego przekształca się w energię
cieplną. Praca elementarna wykonana przez
zanikający prąd indukcyjny wynosi:
dW
EIdt
dW
LIdI
====
==== −−−−
E
L
dI
dt
==== −−−−
I
0
°°°°
°°°°
r
B
34
Praca wykonana przez prąd, którego natężenie maleje do zera stanowi sumę prac
elementarnych i wynosi:
W
dW
LIdI
I
====
==== −−−−
∫∫∫∫
∑
∑
∑
∑
0
0
W
L
I
I
==== −−−−
2
0
2
0
⇒
⇒
⇒
⇒
W
LI
====
1
2
0
2
Sumowanie prac elementarnych można również wykonać metodą całkowania
graficznego. Wartość pracy elementarnej wykonanej przez prąd samoindukcji
wynosi:
YdI
dW
LIdI
dW
====
====
Y
LI
====
Y
jest liniową funkcją natężenia prądu, a zatem
jej wykresem jest linia prosta. Miarą pracy
elementarnej jest pole wąskiego prostokąta
zawartego pod wykresem funkcji Y. Praca
wykonana przy zmianie natężenia prądu o I
0
jest
równa sumie prac elementarnych i odpowiada jej
pole trójkąta zawartego pod wykresem.
W
I LI
LI
====
====
1
2
1
2
0
0
0
2
W przypadku długiego solenoidu, w którym płynie prąd , gęstość energii pola
magnetycznego wynosi:
W
V
LI
lS
n s
l
lS
I
nI
l
nI
l
o
====
====
====
1
2
1
2
0
2
2
0
2
0
0
0
µµ
µµ
µµ
µµ
µµ
µµ
µµ
µµ
Ostatecznie otrzymujemy:
W
V
BH
====
1
2
Y
LI
0
I
0
I
dI
Y
35
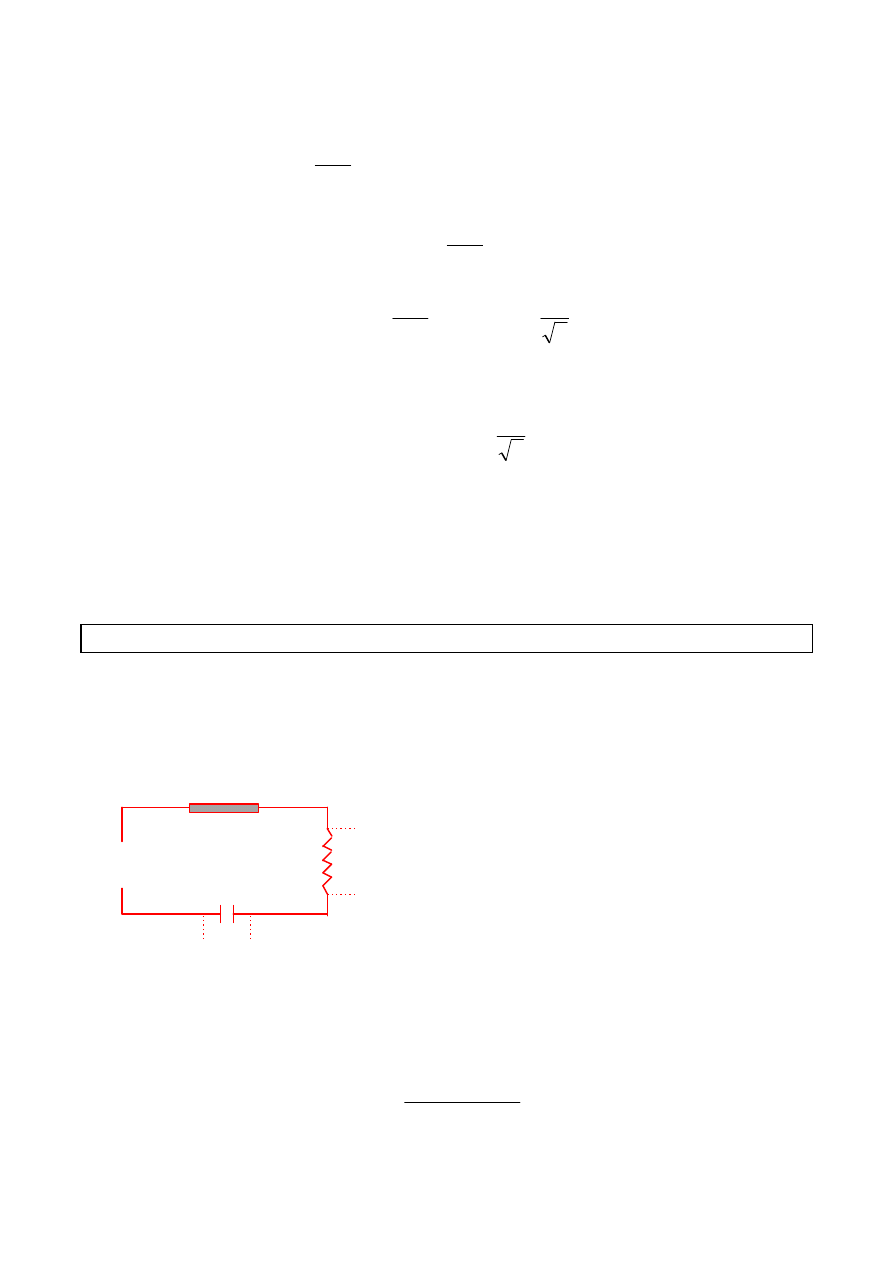
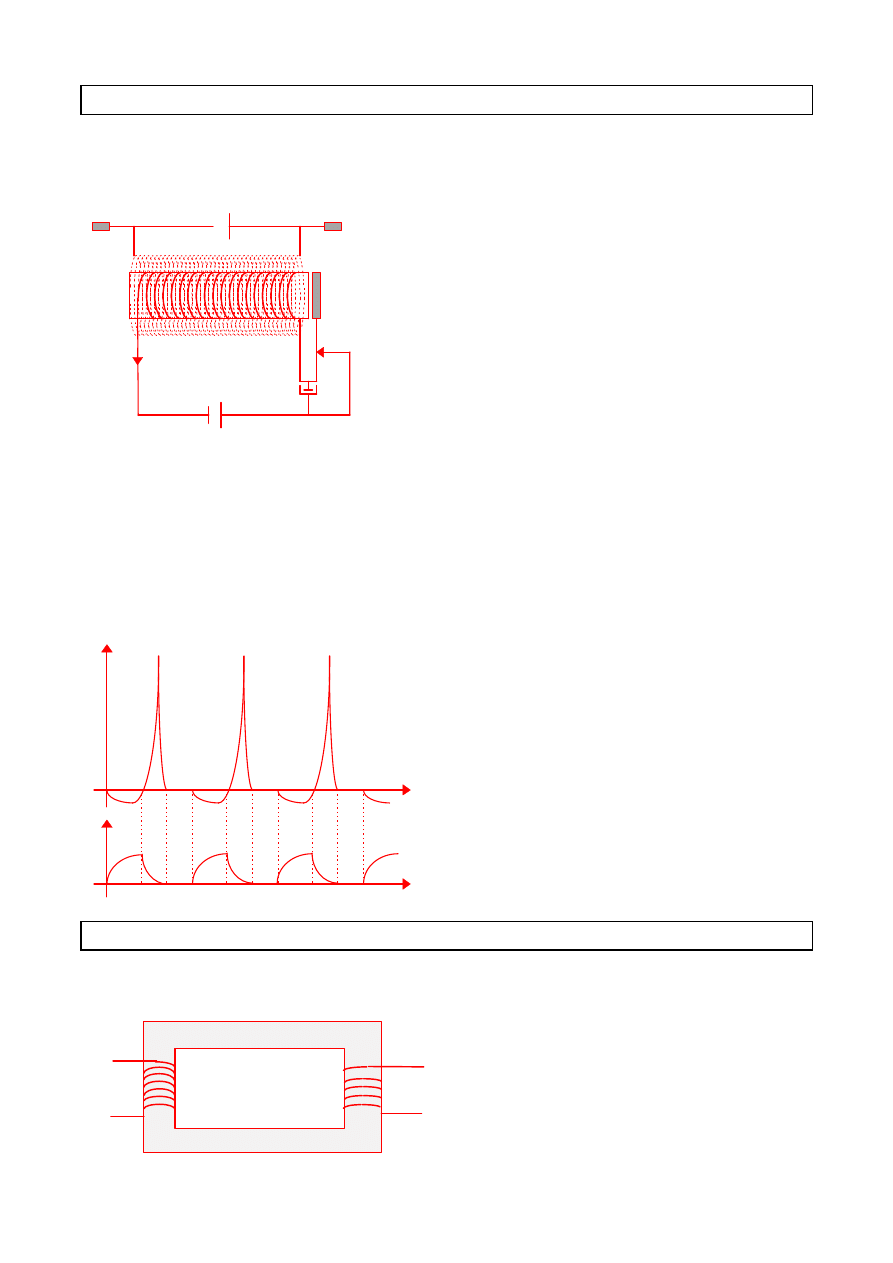
Induktor
Induktor jest urządzeniem, które służy do otrzymywania wysokiego napięcia. Na
rdzeniu wykonanym z miękkiej stali nawinięte jest uzwojenie pierwotne wykonane z
grubego, izolowanego drutu. Uzwojenie to jest zasilane ze źródła prądu stałego o
napięciu kilku woltów. Przepływ prądu powoduje
powstanie pola magnetycznego i namagnesowany
rdzeń przyciąga młoteczek przerywacza. W ten
sposób obwód zostaje przerwany. Rdzeń ulega
rozmagnesowaniu
a
odskakujący
młoteczek
ponownie zamyka obwód. Uzwojenie pierwotne
wytwarza zatem zmienne pole magnetyczne. Pole to
przenika przez uzwojenie wtórne nawinięte na ten
sam rdzeń, liczące wiele tysięcy zwojów cienkiego
drutu. W każdym zwoju powstaje SEM indukcji, w wyniku czego na końcach
uzwojenia wtórnego połączonych z iskiernikiem powstaje wysokie napięcie
umożliwiające np. powstawanie wyładowań iskrowych. Z powodu dużej
indukcyjności uzwojeń, w momentach rozłączenia obwodu powstaje znaczne
napięcie samoindukcji, co prowadzi do iskrzenia na styku przerywacza. Aby nie
dopuścić do zniszczenia styku stosuje się kondensator o dużej pojemności, włączony
równolegle do przerwy iskrowej. Zmiany natężenia prądu w uzwojeniu pierwotnym i
odpowiadające im zmiany napięcia na końcach uzwojenia wtórnego induktora
przedstawiają
zamieszczone
obok
wykresy. Prąd w uzwojeniu wtórnym jest
zmienny, również co do kierunku. Silne
skoki
napięcia
powstają
podczas
przerywania
prądu
w
uzwojeniu
pierwotnym.
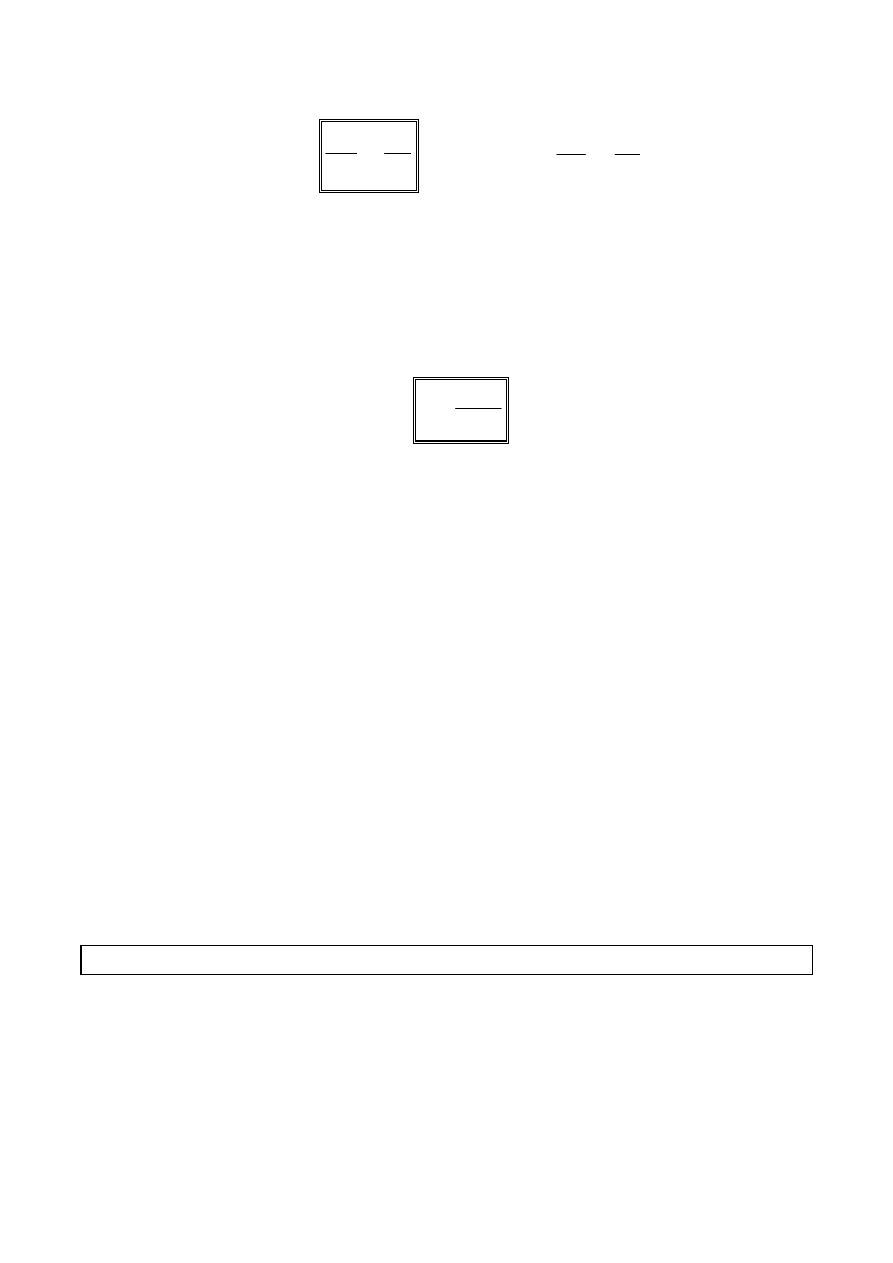
Transformator
Transformator służy do uzyskiwania zmian napięcia prądu zmiennego. Na rdzeniu
wykonanym z miękkiej stali są nawinięte dwa uzwojenia liczące różne ilości
zwojów. Do uzwojenia pierwotnego
liczącego n
1
zwojów zostaje włączone
zmienne napięcie o wartości skutecznej
U
1
. Wewnątrz uzwojenia powstaje
zmienne
pole
magnetyczne,
które
I
U
t
t
I
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
∅
n
2
n
1
U
2
U
1
36
przenika do uzwojenia wtórnego liczącego n
2
zwojów. W każdym zwoju powstaje
SEM
indukcji i na końcach uzwojenia wtórnego powstaje zmienne napięcie o
wartości skutecznej U
2
. Jeżeli do uzwojenia pierwotnego zostanie przyłożone
napięcie sinusoidalne U’ = U
0
sin
ω
ω
ω
ω
t
, to z powodu znacznej indukcyjności tego
uzwojenia popłynie w nim prąd, którego natężenie jest przesunięte
w fazie praktycznie o
ππππ
2
I
I
t
I
t
'
sin
cos
====
−−−−
==== −−−−
0
0
2
ω
ω
ω
ω
ππππ
ω
ω
ω
ω
Strumień indukcji magnetycznej wytworzony w uzwojeniu pierwotnym jest wprost
proporcjonalny do natężenia płynącego prądu i wynosi:
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
==== −−−−
0
cos
ω
ω
ω
ω
t
Chwilowe natężenie prądu płynącego przez uzwojenie pierwotne można określić z
prawa Ohma:
I
U
d
dt
n
R
'
'
====
−−−− Φ
Φ
Φ
Φ
1
1
dt
d
n
'
U
R
'
I
1
1
Φ
Φ
Φ
Φ
−−−−
====
⇒
⇒
⇒
⇒
R
U
n
d
dt
1
1
0
≈≈≈≈
⇒
⇒
⇒
⇒
====
'
Φ
Φ
Φ
Φ
d
dt
t
Φ
Φ
Φ
Φ ΦΦΦΦ
====
0
ω
ω
ω
ω
ω
ω
ω
ω
sin
U
n
t
'
sin
==== Φ
Φ
Φ
Φ
0
1
ω
ω
ω
ω
ω
ω
ω
ω
Przez uzwojenie wtórne przenika ten sam strumień indukcji magnetycznej.
Powoduje to powstanie na jego końcach napięcia chwilowego:
U
d
dt
n
U
n
t
''
''
sin
==== −−−−
====
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
2
0
2
ω
ω
ω
ω
ω
ω
ω
ω
U
U
U
U
n
n
n
n
1
2
01
02
0
1
0
2
1
2
====
====
====
Φ
Φ
Φ
Φ
Φ
Φ
Φ
Φ
ω
ω
ω
ω
ω
ω
ω
ω
Wynika stąd, że stosunek liczby zwojów w uzwojeniu pierwotnym do liczby
zwojów w uzwojeniu wtórnym jest równy stosunkowi napięć skutecznych na
końcach tych uzwojeń. Stosunek ten nazywamy przekładnią transformatora.
37
U
U
n
n
1
2
1
2
====
n
n
I
I
1
2
2
1
====
W praktyce zachodzi jednak pewne rozpraszanie strumienia indukcji magnetycznej i
stosunek napięć nieco różni się od stosunku liczby zwojów.
Sprawnością transformatora nazywamy stosunek mocy pobieranej z uzwojenia
wtórnego do mocy dostarczonej do uzwojenia pierwotnego:
ηηηη ====
U I
U I
2
2
1 1
Sprawność transformatorów dochodzi do 98%.
Istnieją trzy zasadnicze przyczyny strat energii w obwodzie transformatora:
1. Ciepło Joule’a Lenza.
W każdym przewodniku, w którym płynie prąd wydziela się ciepło Q = I
2
R t
.
Straty spowodowane w ten sposób można zminimalizować przez stosowanie
przewodów wykonanych z bardzo dobrych przewodników (miedź, aluminium), o
odpowiednio dużym przekroju poprzecznym.
2. Prądy wirowe.
Powstają one w rdzeniu transformatora i są wywołane przez zmienne pole
magnetyczne. Aby zmniejszyć straty wywołane przez prądy wirowe rdzenie
transformatorów wykonuje się z cienkich blaszek.
3. Histereza żelaza.
Konieczność ustawicznych zmian stanu namagnesowania rdzenia wiąże się z
nieustannymi obrotami domen magnetycznych. W wyniku tarcia wydziela się ciepło.
Straty spowodowane histerezą żelaza można zmniejszyć wykonując rdzeń
transformatora ze szczególnie miękkich materiałów ferromagnetycznych.
Prawa Maxwella
Wokół przewodnika z prądem istnieje pole magnetyczne. Zgodnie z prawem
Ampere’a zachodzi związek:
38
H dl
I
||
∑
∑
∑
∑
====
Krążenie
H
r
po konturze zamkniętym jest równe natężeniu
prądu przepływającego przez ten kontur.
Jeśli w obwodzie prądu zmiennego znajduje się
kondensator, to pomiędzy okładkami tego kondensatora
istnieje zmienne pole elektryczne. Przez powierzchnię
zamykającą jedną z okładek przenika zmienny strumień natężenia pola
elektrycznego. Zgodnie z prawem Gaussa zachodzi
równość:
Ψ
Ψ
Ψ
Ψ
E
Q
====
εε
εε
εε
εε
0
Ψ
Ψ
Ψ
Ψ
E
- strumień całkowity natężenia pola przenikający
powierzchnię, która zamyka ładunek Q.
Pochodna strumienia natężenia pola po czasie wynosi:
d
dt
dQ
dt
I
E
p
Ψ
Ψ
Ψ
Ψ ====
====
1
1
0
0
εε
εε
εε
εε
εε
εε
εε
εε
Zmiana strumienia jest zatem równoważna przepływowi prądu. Wynika stąd, że
chociaż między okładkami kondensatora nie płynie prąd elektryczny, to wokół linii
sił zmiennego pola elektrycznego musi istnieć pole magnetyczne. Zgodnie z prawem
Ampere’a otrzymujemy:
H dl
I
d
dt
p
E
||
∑
∑
∑
∑
====
==== εε
εε
εε
εε
0
Ψ
Ψ
Ψ
Ψ
Jeśli przez pewien kontur zamknięty przepływa prąd elektryczny i przenika zmienne
pole elektryczne, to dla tego konturu zachodzi związek:
H dl
I
d
dt
E
||
∑
∑
∑
∑
==== ++++ εε
εε
εε
εε
0
Ψ
Ψ
Ψ
Ψ
Powyższa zależność jest określona jako pierwsze prawo Maxwella. Jego istotą jest
związek między polem elektrycznym jako przyczyną i polem magnetycznym jako
skutkiem. Przyczyną pola magnetycznego jest nie tyle prąd płynący w przewodniku
co pole elektryczne, które ten prąd wywołało. Zmienne pole elektryczne jest
przyczyną zmiennego, wirowego pola magnetycznego.
B
r
H
r
H
||
+ + + + + + + + + + + +
+
- - - - - - - - - - - -
39
Jeśli przez obwód zamknięty przenika zmienne
pole magnetyczne, to w tym obwodzie powstaje
prąd indukcyjny. Zgodnie z prawem indukcji
Faradaya, SEM indukcji wyraża się wzorem:
SEM
d
dt
==== −−−− Φ
Φ
Φ
Φ
Napięcie, które jest przyczyną prądu indukcyjnego jest sumą różnic potencjałów
liczonych wzdłuż obwodu.
SEM
dV
====
∑
∑
∑
∑
Różnica potencjałów na odcinku dl obwodu wiąże się z natężeniem pola
elektrycznego skierowanym wzdłuż dl:
E
dV
dl
dV
E dl
SEM
E dl
||
||
||
====
⇒
⇒
⇒
⇒
====
====
∑
∑
∑
∑
Prawo indukcji Faradaya można zatem zapisać w postaci:
E dl
d
dt
||
∑
∑
∑
∑
==== −−−− Φ
Φ
Φ
Φ
Sumę po lewej stronie równania nazywamy krążeniem wektora E po konturze
zamkniętym. Powyższą zależność nazywamy drugim prawem Maxwella.
Prawo to stanowi uogólnienie prawa indukcji Faraday’a. Jego istotą jest związek
między polem magnetycznym jako przyczyną i polem elektrycznym jako skutkiem.
Zmienne pole magnetyczne wytwarza zmienne, wirowe pole elektryczne. Prąd
elektryczny jest skutkiem istnienia pola elektrycznego.
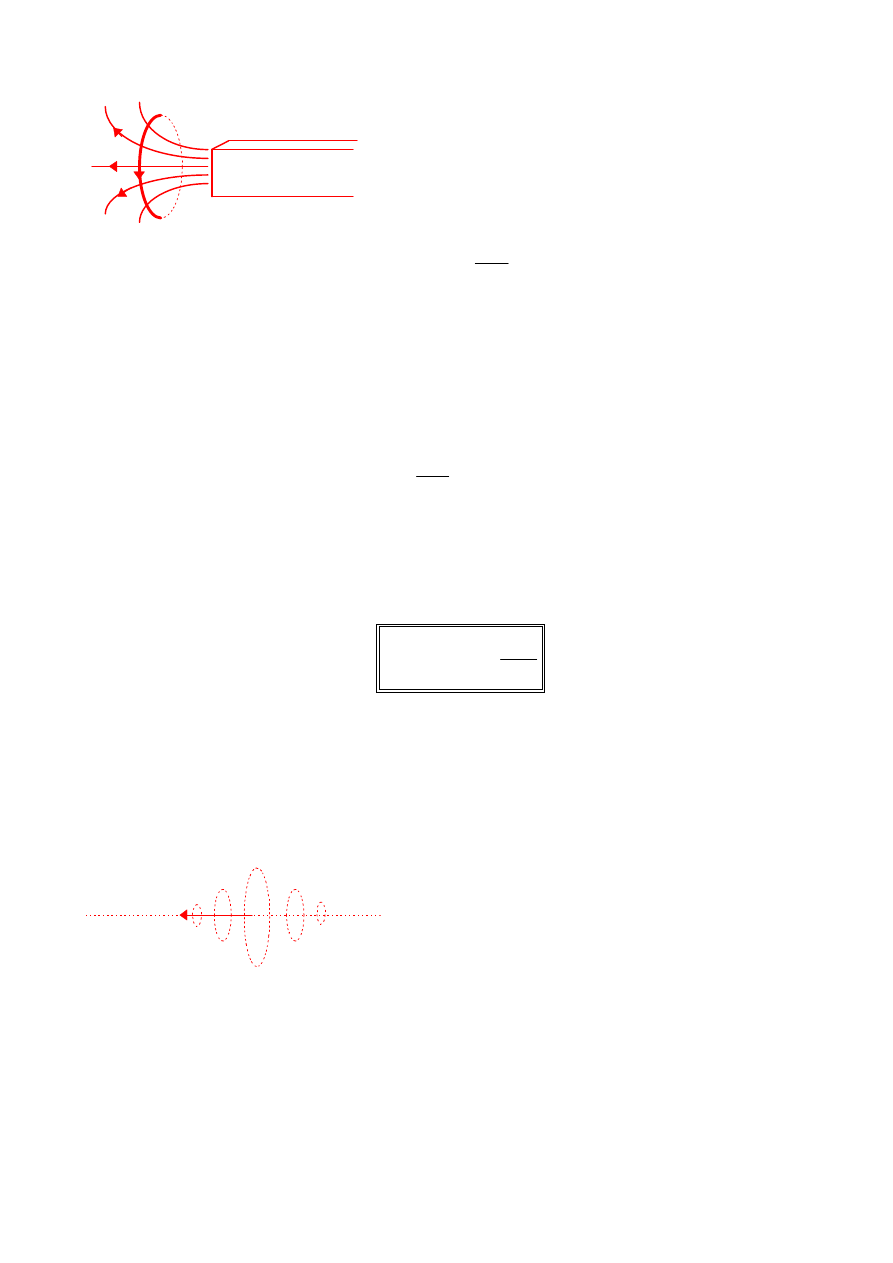
Ruchomy
ładunek
elektryczny
wytwarza
zmienne pole magnetyczne. Zmienne pole
magnetyczne jest z kolei przyczyną zmiennego,
wirowego pola elektrycznego. Oznacza to, że
ruchomy ładunek jest przyczyną powstania ciągu pól: magnetycznego i
elektrycznego. Taki ciąg pól nazywamy falą elektromagnetyczną. Źródłem fali jest
każde zmienne pole elektryczne lub magnetyczne.
N
•
Wyszukiwarka
Podobne podstrony:
22 Pole magnetyczne, indukcja elektromagnetyczna
22 pole magnetyczne, indukcja elektromagnetyczna
4 indukcja elektromagnetyczna
Cw 11 Zjawisko Indukcji Elektromagnetycznej
fizyka.org, indukcja elektromagnetyczna, Fizyka - Zadania - Indukcja elektromagnetyczna
Indukcja elektromagnetyczna id Nieznany
II 4 Indukcja elektromagnetyczna
Zjawisko indukcji elektromagnetycznej, Studia
Egzamin - sciagi, 17. Zjawisko indukcji elektromagnetycznej, 17
więcej podobnych podstron