
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
3
Spis treści:
1
Cele i zadania zdalnej diagnostyki i serwisu .................................................................... 5
2
Istota, składniki i działanie systemu diagnostycznego...................................................... 7
3
Istota, składniki i działanie systemu diagnozowania serwisowego................................. 12
4
Kierunki rozwoju ............................................................................................................. 16

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
4

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
5
1
Cele i zadania zdalnej diagnostyki i serwisu
Współczesne systemy maszynowe cechuje wysoki poziom automaty-
zacji. Stosowane w tej automatyzacji systemy sterowania realizują
swoje zadania na podstawie rozkazów generowanych w mikroproceso-
rach, procesorach bądź komputerach. Rozkazy te, czyli decyzje ste-
rownicze są podejmowane w oparciu o sygnały sensorów rozmiesz-
czonych w elementach wykonawczych systemów mechatronicznych,
informujących o stanie tych elementów i przebiegu realizowanych za-
dań. Są one podstawą do wnioskowania o prawidłowości działania
samych systemów i realizowanych zadań (procesów) oraz oceny in-
tensywności ich zakłóceń, które wymagają aktywnej minimalizacji oraz
kompensacji wywołanych nimi błędów. Samo sterowanie odbywa się
zgodnie z algorytmem, który uwzględnia wszystkie czynniki decydują-
ce o prawidłowości działania systemu mechatronicznego i realizowa-
nych procesów. W wielu przypadkach funkcje sterownicze realizowane
są w sposób inteligentny z zastosowaniem odpowiednich narzędzi
sztucznej inteligencji. Inteligentne może być diagnozowanie poje-
dynczego sytemu mechatronicznego całych maszyn i procesów, a tak-
że nadzorowanie prawidłowości działania systemów mechatronicznych
i maszyn. Ponadto inteligentne może też być ich diagnozowanie dla
celów serwisowych.
Pojawiające się w czasie eksploatacji maszyn nieprawidłowości ich
działania i uszkodzenia, skutkują dla użytkowników dużymi kosztami
opóźnień produkcyjnych, przestojów i napraw. Zrodziło to potrzebę
ciągłego monitorowania działania maszyn i procesów, prognozowania
zakłóceń i działań zapobiegających pogorszeniu jakości procesów, a
także podejmowania zaplanowanych w oparciu o te prognozy nie-
zbędnych działań naprawczych. Monitorowanie takie przeprowadza się
coraz częściej zdalnie i zdalnie podejmowane są decyzje, a nawet i
działania serwisowe. W wielu przypadkach konieczność zdalnego mo-
nitorowania i serwisowania wynika stąd, że niezbędną głęboką wiedzę
do oceny niestandardowych zakłóceń, ich skutków i podejmowania
decyzji serwisowych, mają tylko producenci modułów i całych syste-
mów mechatronicznych.
Zadaniem zdalnej diagnostyki jest przekazanie bezprzewodowo na
małą bądź znaczną odległość sygnałów diagnostycznych o wymaganej
informacyjności, z obiektu diagnozowanego do bliskiego lub dalekiego
odbiornika, stacji monitorującej lub centrum monitorowania. Odpo-
wiedni system wnioskowania, inteligentny system doradczy lub ekspert
oceni zakłócenia i podejmie decyzje serwisowe. Zdalnie generuje on
prognozy i ocenia aktualne odchylenia od prawidłowego działania oraz
identyfikuje postępującą degradację parametrów eksploatacyjnych, z
wymaganą dokładnością i prawdopodobieństwem. Odpowiedzią ukła-
du diagnozowania są wnioski diagnostyczne, które są podstawą do
podejmowania decyzji serwisowych.

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
6
Zadaniem zdalnego systemu serwisowania jest:
- Zapobieganie nadmiernemu pogorszeniu parametrów pracy syste-
mów mechatronicznych (maszyn i urządzeń) poprzez redukcję zakłó-
ceń i kompensację błędów.
- Przewidywanie nadmiernych błędów i uszkodzeń przed ich wystąpie-
niem, umożliwiające przeprowadzenie działań naprawczych w sposób
zaplanowany i przygotowany tak, by ich skutki ekonomiczne były jak
najmniejsze (działanie inteligentne).
- Optymalne planowanie zadań serwisowych w okresach eksploatacji
najkorzystniejszych dla użytkownika.
Rewolucją w zakresie zdalnej diagnostyki jest opanowanie metody za-
równo bezprzewodowego zasilania sensorów, jak i odbioru ich sygna-
łów diagnostycznych. Pozwoliło to na miniaturyzację systemów pomia-
rowych, usprawnienie pomiarów oraz stworzyło możliwość wnikania
sensorami w strukturę obiektów zgodnie z potrzebami diagnozowania.
Zdalne połączenie sensorów z sieciami komunikacyjnymi dało prawie
nieograniczoną możliwość sterowania procesem diagnozowania, ope-
rując nie tylko pojedynczymi sensorami, ale również grupami senso-
rów. Pozwoliło również na wykorzystywanie informacji z sensorów za-
równo przez układy sterujące jak i diagnozujące oraz prognozujące.
Ma to szczególne znaczenie w diagnozowaniu elementów, modułów i
systemów mechatronicznych.
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
2
Istota, budowa i działanie systemu diagnostycznego
Diagnostyka maszyn jest podstawą ich dokładnego i niezawodnego
działania. Im bardziej złożona jest maszyna, jej system mechatronicz-
ny i realizowane procesy technologiczne, tym większa jest liczba róż-
norodnych źródeł zakłóceń, które muszą być okresowo lub ciągle ob-
serwowane – monitorowane, a powodowane nimi błędy – zmniejsza-
ne. Im większa jest wymagana precyzja działania maszyn (diagnozo-
wanych obiektów), tym większa musi być dokładność i niezawodność
identyfikacji i oceny zakłóceń, czyli tym większa musi być dokładność
działania zastosowanych sensorów, przetwarzania pozyskiwanych sy-
gnałów diagnostycznych, oraz dokładność ich przesyłania do monitora,
systemu sterowania, centrum diagnostycznego lub serwisowego. Pro-
jektowanie zatem lub wybór wymaganego procesu diagnostycznego,
niezbędnego sprzętu i oprogramowania, wymaga bardzo obszernej
wiedzy dotyczącej budowy maszyny i realizowanych procesów, teorii i
praktyki diagnozowania oraz wszystkich składników systemów diagno-
stycznych.
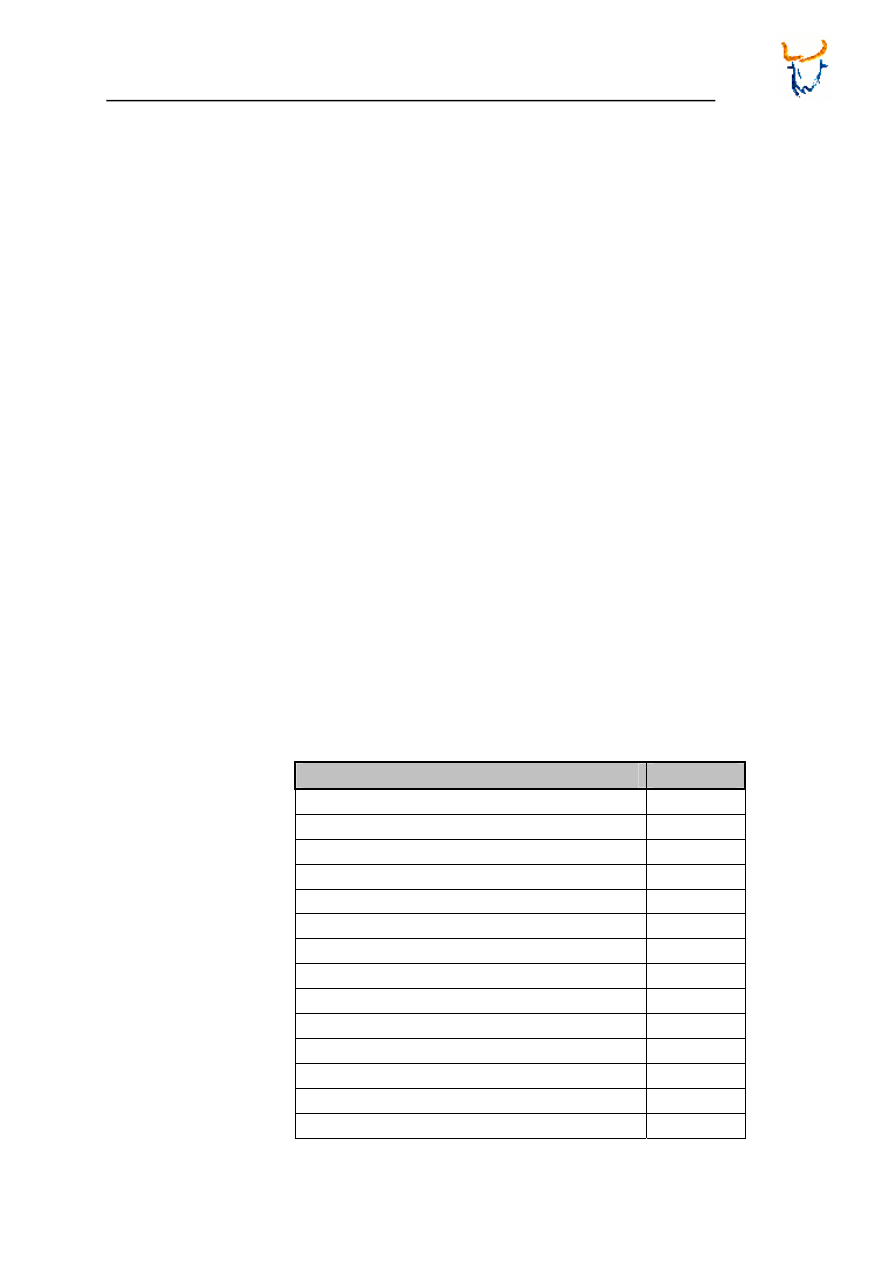
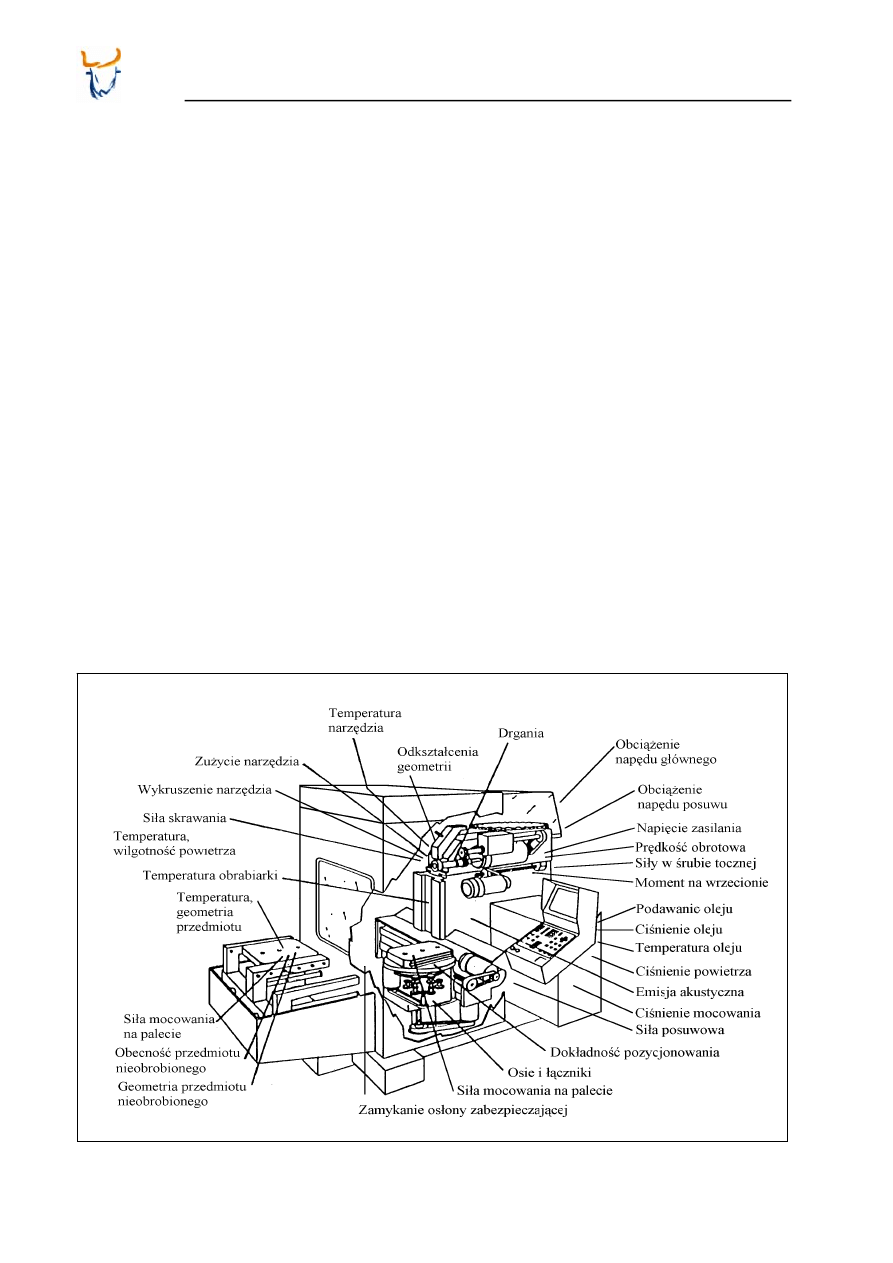
Złożoność i precyzja diagnozowania zależy od wpływu diagnozowa-
nych parametrów maszyn na ich procesy robocze. Przykładowe udzia-
ły niesprawności dla wybranego centrum obróbkowego przedstawia
tabela 1, zaś typowe wielkości wymagające śledzenia pokazano na
rys.1.
Miejsce niesprawności
Udział [%]
Przenoszenie i podawanie przedmiotów
20,1
Układ sterowania DNC
18,2
Mechanizm wymiany narzędzi 14,6
Ustawienie długości narzędzia 14,1
Zespoły mechaniczne obrabiarki
12,1
Uszkodzenie narzędzia 6,8
Mocowanie przedmiotu
2.6
Sterowanie dopasowujące 1,7
Podawanie chłodziwa 1,7
Mocowanie palet
1,1
Układ NC
0,9
Problemy z wiórami
0,9
Hydraulika 0,9
Pozostałe niesprawności 4,3
Tabela 1:
Udziały niesprawności dla centrów obróbkowych
7
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
Kompleksowa diagnostyka tak złożonego obiektu, jakim jest obrabiar-
ka w trakcie jej eksploatacji, jest bardzo trudna i kosztowna. Sensory
do ciągłego lub okresowego monitorowania muszą być na stałe roz-
mieszczone w strukturze obrabiarki - stanowi to zwykle duży koszt.
Łączy się je przewodowo, a w niektórych przypadkach bezprzewodo-
wo z układami obróbki sygnałów, poprzez zastosowanie odpowiednich
standardów komunikacyjnych. Ważne jest, aby sygnały były jedno-
znaczne tj. precyzyjnie informowały o zmianach monitorowanych wiel-
kości oraz aby nie zostały zakłócone w trakcie ich przesyłania do ukła-
dów przetwarzania. Odpowiednio przetworzony sygnał diagnostyczny
wykorzystywany jest następnie w procesie wnioskowania, który w pro-
stym przypadku polega na ocenie jak się ma wartość zmierzona do
wartości właściwej dla poprawnie zachowującego się parametru moni-
torowanego. Wynik wnioskowania stanowi podstawę do sformułowania
wniosków diagnostycznych. Dla złożonych zjawisk i zachowań obiektu
trzeba oceniać naraz wiele sygnałów diagnostycznych. Taki proces
wnioskowania może być bardzo złożony i wymagać stosowania ob-
szernych baz wiedzy, bardzo złożonych procedur i algorytmów, nawet
z udziałem narzędzi sztucznej inteligencji: logiki rozmytej, sieci neuro-
nowych, systemów ekspertowych.
Rys. 1:
Typowe wielkości wymagające śledzenia w centrach obróbkowych
8

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
9
Istotne znaczenie może mieć również sprawność zastosowanego sys-
temu komunikacyjnego – zwłaszcza, gdy diagnozowane wielkości są
krytyczne dla niezawodności działania obiektu (wymagają szybkiej re-
akcji). Im dalej od źródła sygnału znajduje się czujnik, tym większa jest
obawa, że czułość układu nadzorowania może być niewystarczająca,,
a czas reakcji zbyt długi. W takich przypadkach nieodzowne może się
okazać stosowanie odpowiednich wzmacniaczy pomiarowych zinte-
growanych z sensorami, filtrów cyfrowych oraz odpowiedniego prze-
twarzania sygnałów. Stosując takie procedury można bardzo zwięk-
szyć rozdzielczość wielkości mierzonej pomiarowych.
Danymi wejściowymi do diagnostyki obiektu są:
- właściwości sygnałów diagnostycznych i miejsca ich pozyskiwania
(lokalizacja sensorów, szybkość zmian, dostępność dla serwisu),
- wartości graniczne kontrolowanych wielkości,
- zależności pomiędzy generowanymi sygnałami, a zakłóceniami za-
chowania się obiektu lub procesu,
- czujniki i urządzenia pomiarowe (czułość, złożoność, adaptacyjność,
liczebność, koszt, stopień automatyzacji),
- forma gromadzonych informacji,
- metody przetwarzania sygnałów,
- metody weryfikacji,
- sposób komunikacji z odbiornikami,
- strategia diagnozowania,
- metody wnioskowania.
Aby ograniczyć liczbę niezbędnych sensorów i zmniejszyć złożoność
systemu przetwarzania sygnałów, często racjonalne jest korzystanie z
takich sensorów, których sygnały mogą po odpowiednim przetworze-
niu dostarczać wielu informacji o zachowaniu się obiektu.
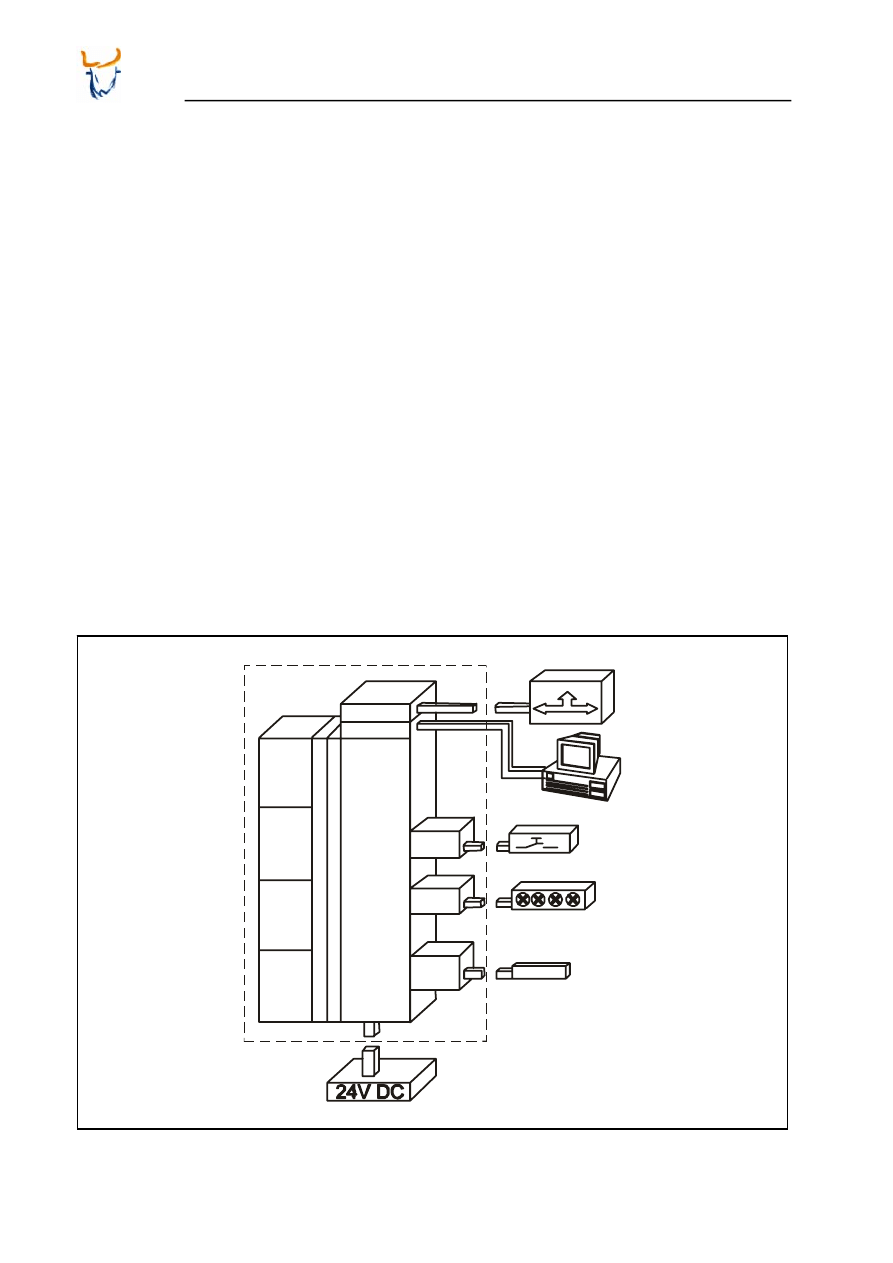
Znaczne uproszczenie torów pomiarowych i łatwiejsze pozyskiwanie
informacji diagnostycznych może zapewnić stosowanie przetworników
inteligentnych. Dla przykładu strukturę inteligentnego przetwornika siły
przedstawia rys. 2. Są to zazwyczaj małe gabarytowo zespoły, wyko-
nywane jako mikrostruktury MEMS (Micro-Electro-Mechanical Sys-
tems), które obejmują czujnik z odpowiednio dopasowanym wzmac-
niaczem cyfrowym i mikroprocesor, z zapisaną wiedzą do inteligentne-
go przetwarzania sygnałów.
Kryteriami do projektowania diagnostyki są:
- czułość sygnałów diagnostycznych na zmiany zachowania się ma-
szyny/procesu oraz pojemność informacyjna,
- stopień degradacji maszyny/procesu,
- poziom kwalifikacji obsługi,
- niezawodność,
- koszty eksploatacyjne.
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
Typowe urządzenie diagnostyczne obiektów mechanicznych składa
się z następujących zespołów i elementów:
1. Układ pomiarowy (czujniki, układy dopasowujące – odpowiedzialne
za dopasowanie energetyczne i informacyjne sygnałów, gniazda dia-
gnostyczne do pobierania informacji z obiektu).
2. wzmacniacze pomiarowe, przetworniki analogowo – cyfrowe, prze-
łączniki kanałów, porty WE/WY (I/O), inne.
3. Procesor sygnałowy (Digital Signals Processor – wykorzystywany
do obliczania wartości symptomów diagnostycznych).
4. Układ decyzyjny zawierający (przetworniki logiczne, translatory po-
ziomów napięć, komparatory cyfrowe, inne).
5. Układ prezentacji informacji (display), który dekoduje informacje i
przedstawia je w formie najdogodniejszej dla użytkownika (monitor,
drukarka, wskaźniki analogowe, wskaźniki cyfrowe, inne).
6. Układ gromadzenia informacji (pamięć: RAM, RAM-DISK, VDISK).
7. Oprogramowanie (systemowe, przetwarzania i analizy sygnałów,
diagnozowania i prognozowania stanu, funkcji realizowanych przez
urządzenie diagnostyczne, komunikacji pomiędzy warstwami systemu,
zarządzające pracą systemu.
PC
wyjścia
alarm.
a/c
DIN 66348
wejścia
5|2|6|9|3
RS 485
RS 232
czujnik
siły
czujnik
ciśnie-
nia
czujnik
temp.
czujnik
siły
1
2
Mi
kr
o
p
ro
ce
so
r
P
rz
e
tw
o
rn
ik
a
/c
Uk
ład p
rób
ku
ją
co
p
a
m
ię
taj
ą
cy
Rys. 2:
Struktura inteligentnego przetwornika siły
10
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
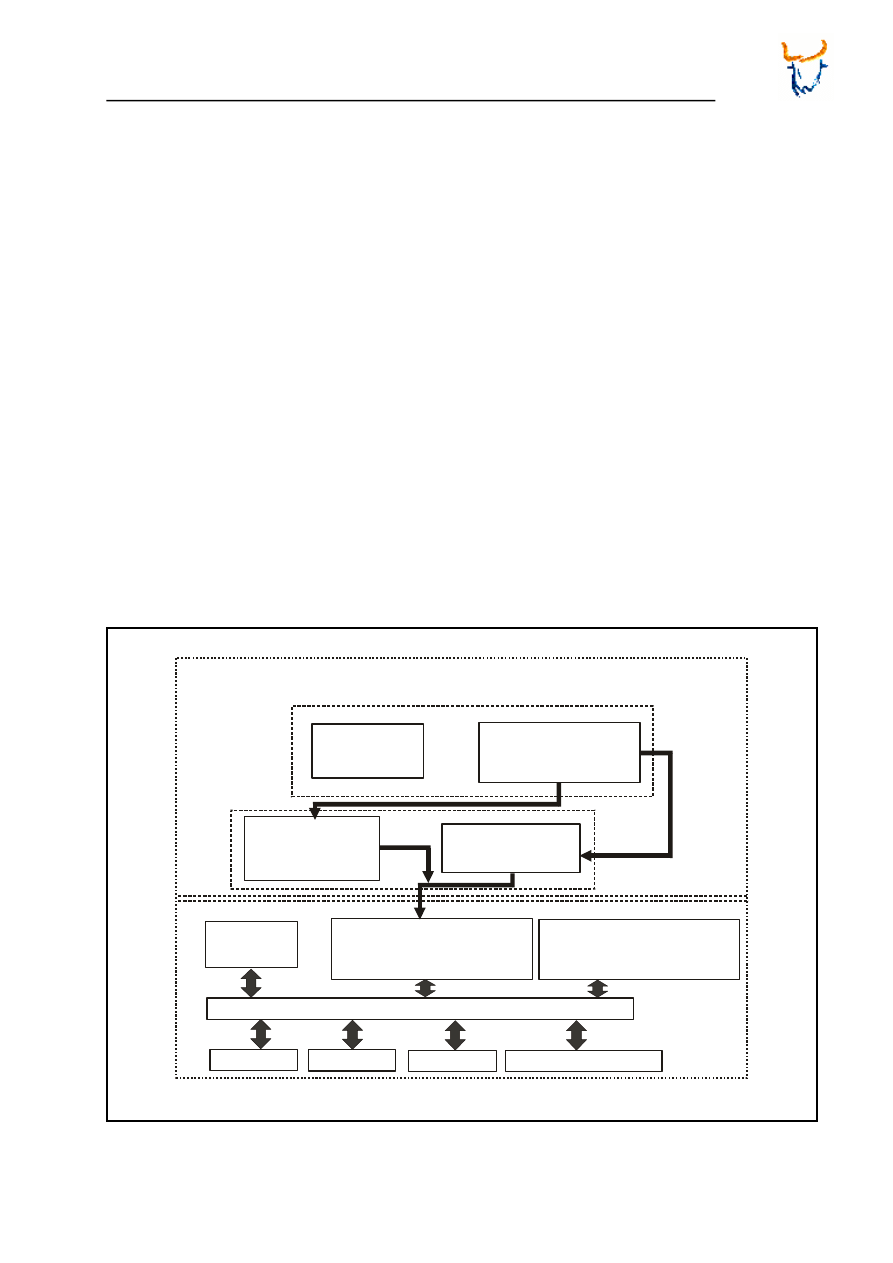
Schemat blokowy urządzenia diagnostycznego przedstawia rys. 3.
Elementy
Czujniki
sygnałów
diagnostycznych
System
diagnostyczny
Gniazda
diagnostyczne
URZĄDZENIE DIAGNOSTYCZNE
Procesor
Wielokanałowy
przetwornik sygnałów
diagnostycznych
Pamięć RAM
Pamięć RAM-DISK
Pamięć VDISK
Magistrala systemowa
Klawiatura
Monitor
Drukarka
Oprogramowanie
Rys. 3:
Schemat blokowy mikroprocesorowego urządzenia diagnostycznego
11

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
12
3
Istota, składniki i działanie systemu diagnozowania serwisowego
W odróżnieniu od ogólnej diagnostyki prawidłowości działania obiektu i
prawidłowości realizowanych przez ten obiekt procesów roboczych,
która informuje użytkownika o tym, czy zakłócenia są w dopuszczal-
nych granicach i czy osiąga się zadowalającą dokładność wyrobów,
diagnostyka serwisowa ma służyć okresowej korekcji błędów i plano-
wemu przywracaniu obiektowi poprawnych parametrów eksploatacyj-
nych. Polega ona zatem na śledzeniu stopnia degradacji obiektu (ma-
szyny) po to, by w odpowiednim czasie zastosować korekcję, kompen-
sację błędów lub dokonać naprawy w sposób planowy i dobrze przygo-
towany, czyli w krótkim czasie postoju, wtedy, gdy jest to niezbędne, a
zarazem dogodne dla użytkownika. Diagnostyka serwisowa służy za-
tem przywracaniu maszynie jej prawidłowych parametrów eksploata-
cyjnych, gwarantujących żądaną dokładność realizowanych procesów
(wyrobów).
Prognozowanie postępującej degradacji składników maszyny z natury
rzeczy wymaga bardziej szczegółowego niż ma to miejsce w diagno-
styce ogólnej, wnikania w procesy zużycia, mechanizm zmiany warto-
ści parametrów eksploatacyjnych – symptomy postępujących uszko-
dzeń. Jest zatem konieczne operowanie w tej diagnostyce najnowszą,
obszerną wiedzą dotyczącą budowy i działania maszyny, jej dokładno-
ści, zakłóceń tej dokładności, metodach korygowania błędów, ich kom-
pensacji oraz technik i technologii dokonywania napraw.
Możliwości przeprowadzania działań diagnostyki serwisowej muszą
być na ogół uwzględnione już na etapie konstruowania maszyn. Doty-
czy to zwłaszcza rozmieszczenia w strukturze maszyn samych senso-
rów lub sensorów o strukturze czujników inteligentnych oraz elemen-
tów niezbędnych do ich komunikacji z centrum diagnostyczno – serwi-
sowym użytkownika lub producenta. Na tym etapie mogą być również
przeprowadzane symulacje związków sygnałów diagnostycznych z
usterkami, które ułatwiają prognozowanie działań serwisowych i okre-
ślanie potrzeb związanych ze strukturą układów pomiarowych.
Operowanie wiedzą w tej diagnostyce wiąże się z modelowaniem za-
chowania się maszyny w warunkach eksploatacyjnych, modelowaniem
błędów w postaci funkcji uproszczonych nadających się do okresowe-
go nadzorowania i kompensacji, prognozowaniem ograniczonego, do-
puszczalnego, pogorszenia zachowania się maszyny i możliwych
uszkodzeń.
Działania te są bardzo złożone i wymagają angażowania odpowied-
niego sprzętu komputerowego i oprogramowania oraz bardzo wyso-
kich kwalifikacji projektantów. W wielu przypadkach można korzystać z
wyspecjalizowanych handlowych programów i modułów diagnostycz-
nych.
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
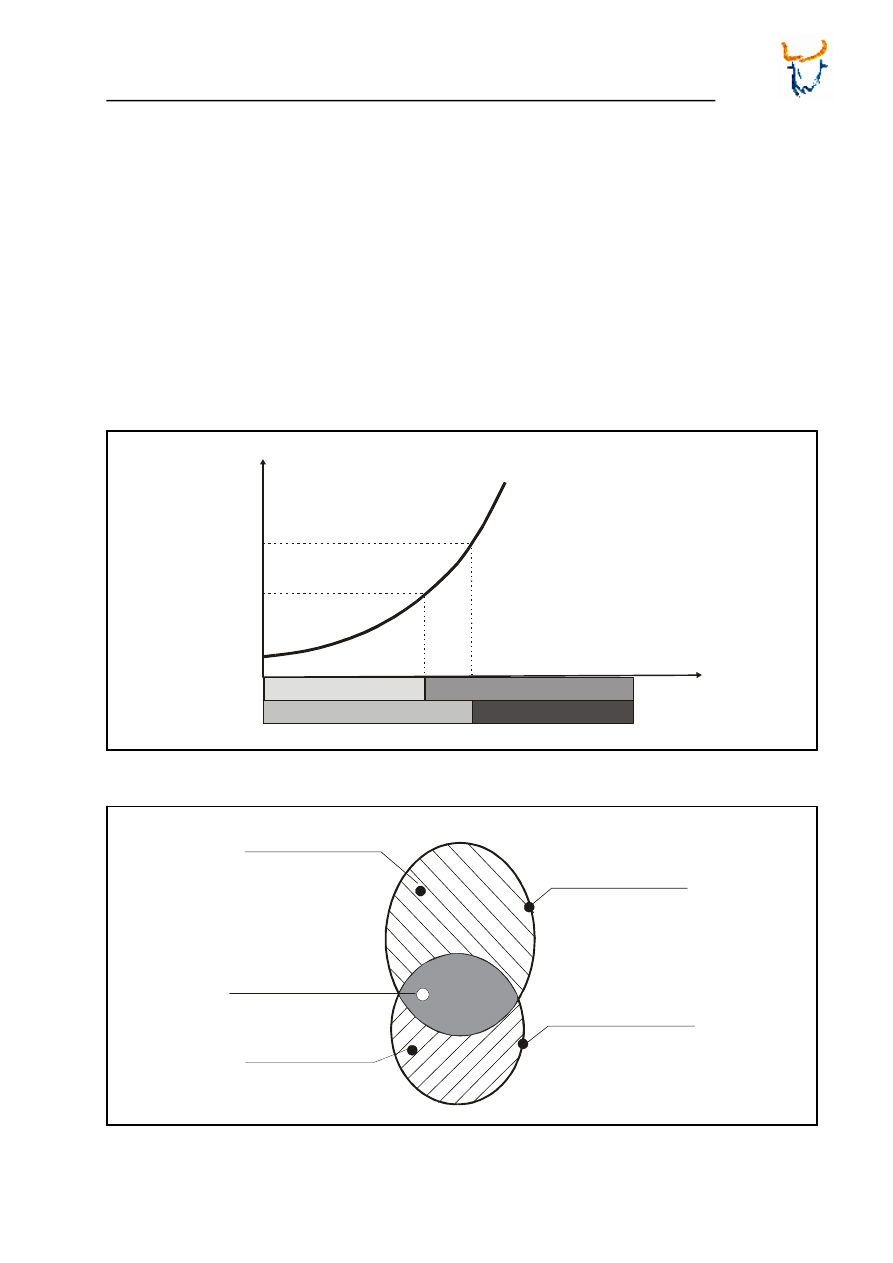
Przykładowy przebieg degradacji parametru eksploatacyjnego maszy-
ny/urządzenia technologicznego przedstawia rys. 4. Zaznaczono na
nim wartość dopuszczalną sygnału mierzonego (symptomu diagno-
stycznego) oraz jego wartość graniczną i wynikający stąd stan spraw-
ności i stan niesprawności technicznej maszyny. Przekroczenie przez
symptom wartości dopuszczalnej U
d
oznacza, że diagnozowane urzą-
dzenie jest już niesprawne technicznie, ale może być jeszcze przez
pewien czas eksploatowane, – czyli jest jeszcze zdatne do realizacji
swoich funkcji. O stanie niezdatności urządzenia do dalszej eksploata-
cji będzie świadczyć przekroczenie przez symptom wartości granicznej
Ug, która wyznacza też ostateczny termin dokonania naprawy. Obsza-
ry stanów zdatności eksploatacyjnej, i niesprawności technicznej, mo-
gą częściowo na siebie zachodzić. Pokrywanie się tych dwóch stanów
określa obszar, w którym urządzenie jest niesprawne, ale jeszcze
zdatne do eksploatacji (rys. 5).
S
ygna
ł/s
ym
ptom
- wartość graniczna
stan sprawny
stan niezdatny
U
g
U
d
stan niesprawny
ale zdatny
U
g
U
d
- wartość dopuszczalna
stan sprawny
stan niesprawny
stan zdatny
stan niezdatny
Parametr struktury/stan techniczny
Rys. 4:
Klasyfikacja stanów technicznych maszyn i urządzeń
Obszar
niesprawności
Obszar
zdatności
Stany sprawności
Stany niesprawności
ale zdatności
Stany niezdatności
Rys. 5: Obszary stanów technicznych maszyn i urządzeń
13
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
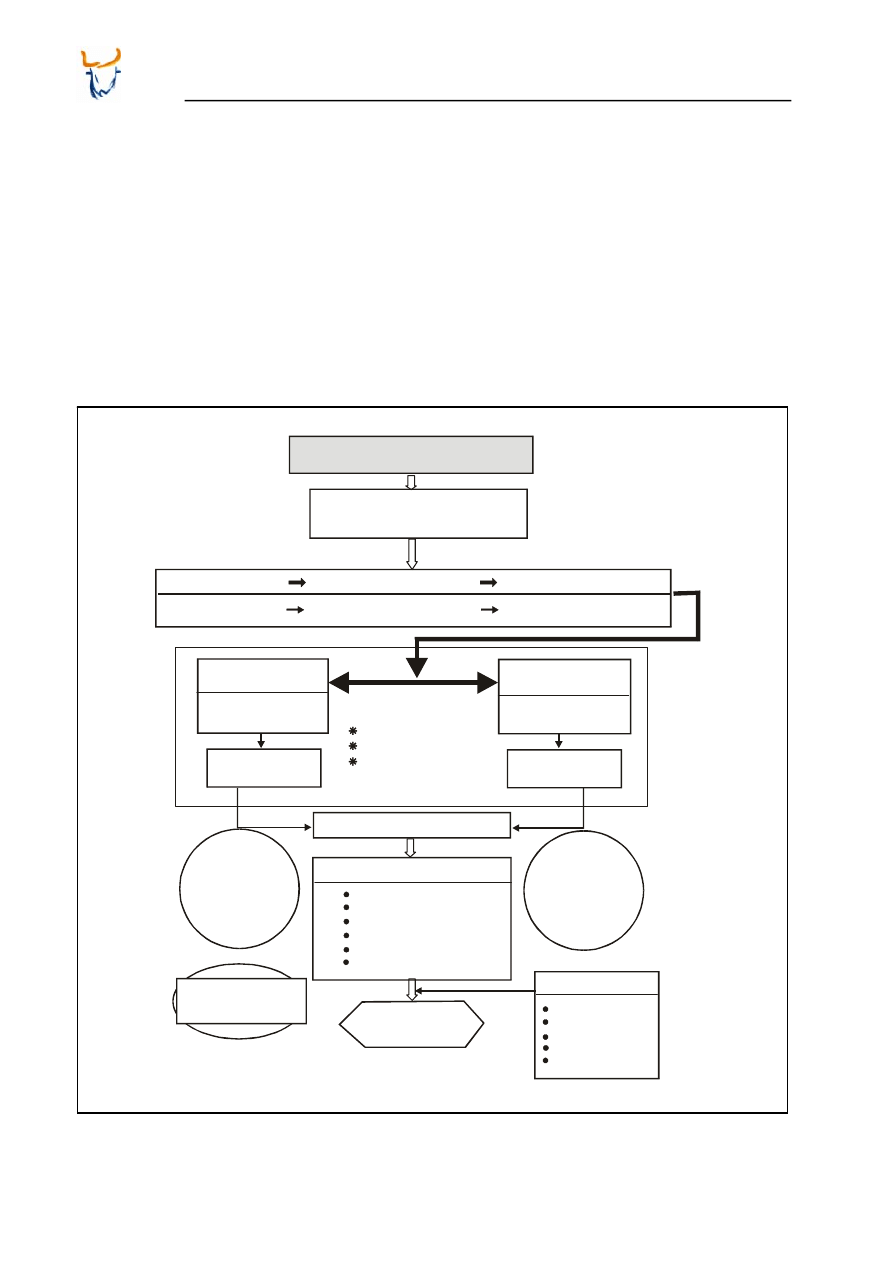
Zakres komputerowego wspomagania eksploatacji obiektów technicz-
nych przetwarzaniem wiedzy i diagnostyką przedstawia rys. 6.
Uwzględnia on bardzo szerokie spektrum analiz oraz stosowanie na-
rzędzi sztucznej inteligencji.
ZADANIE DIAGNOSTYCZNE
(obiekty rzeczywiste)
MODELE MECHANICZNE
(struktura i cechy stanu)
Opis jakościowy Opis wyjaśniący Opis ilościowy
MODEL
STRUKTURALNY
- dynamika
zużycia
MODEL
HOLISTYCZNY
MODEL
STRUKTURALNY
- ewolucja
zużycia
MODEL
SYMPTOMOWY
MODEL DIAGNOSTYCZNY
DIAGNOSTYKA
HOLISTYCZNA
DIAGNOSTYKA
SYMPTOMOWA
DIAGNOSTYKA
ENERGETYCZNA
DIAGNOZA
(aktualna/przyszła)
KRYTERIA
podział modeli
trafność
stany graniczne
efektywność
inne
deterministyczne
probabilistyczne
rozmyte
MODELE WNIOSKOWANIA
deterministyczne
probabilistyczne
rozmyte
neuronowe
eksperckie
inne
MODEL FIZYCZNY MODEL MATEMATYCZNY IDENTYFIKACJA MODELI
Typy modeli:
Rys.6: Możliwości modelowania diagnostycznego obiektów
14
Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
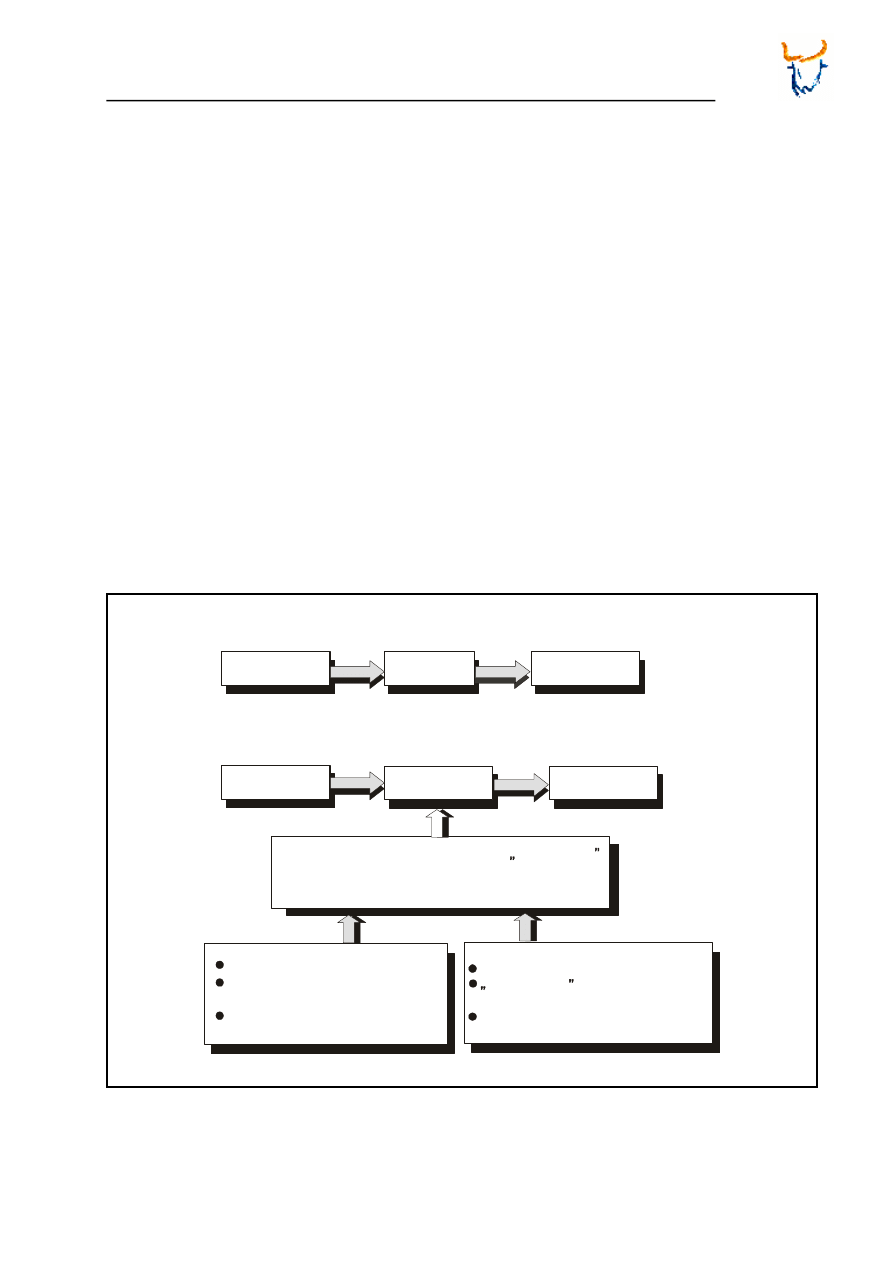
Sposób poszukiwania relacji pomiędzy symptomem a defektem, co
jest intencją diagnostyki serwisowej, pokazuje rys. 7. Wymaga to bar-
dzo złożonego działania na modelach: odwracania modeli, złożonego
badania ich czułości na defekt, generowania danych uczących,, two-
rzenia modeli adaptacyjnych oraz budowy relacji diagnostycznych.
Dzięki posłużeniu się w procesie diagnozowania takimi właśnie symu-
lacyjnymi technikami pozyskiwania relacji symptom – defekt obsługa
diagnozowanego urządzenia uzyska na monitorze, nie tylko informacje
o wystąpieniu awarii, ale również identyfikację defektu.
DEFEKT
MODEL
SYMPTOM
SYMPTOM
MODEL
ODWRÓCONY
DEFEKT
Odwracanie modeli za pomocą trenowania
układów adaptacyjnych
(algorytmy specjalne, sieci neuronowe)
Budowa modeli obiektów
Badanie czułości modelu
na defekt
Generowanie danych
uczących
Budowa modeli adaptacyjnych
Trenowanie układów
adaptacyjnych
Budowa relacji diagnostycznych
Metoda klasyczna
Metoda odwracania modeli
Rys. 7:
Symulacyjne techniki pozyskiwania relacji diagnostycznych: klasyczne i w oparciu
o metodologię odwracania modeli przyjętych obiektów
15

Zdalna diagnostyka i obsługa systemów mechatronicznych - Podręcznik
Minos
16
4
Kierunki rozwoju
Zdalna diagnostyka i serwis ma bardzo silne umocowanie ekonomicz-
ne wynikające stąd, że przyczynia się do zwiększenia czasu życia wy-
robów. Tendencje zatem zwiększania czasu życia będą się przekłada-
ły na tendencje rozwoju zdalnej diagnostyki i nadzorowania. Ponadto
wobec rosnącej globalizacji wytwarzania, jego rozproszenie rośnie i
coraz bardziej nieodzowne staje się korzystanie ze zdalnej diagnostyki
i serwisu, co powinno znacząco zwiększać niezawodność systemów
mechatronicznych, procesów technologicznych oraz wytwarzanych fi-
nalnych wyrobów. Będzie zatem nadal intensywnie rozwijana moduło-
wość systemów diagnozowania i coraz więcej funkcji diagnostycznych
będzie realizowanych przez inteligentne sensory. Będzie temu z natury
rzeczy towarzyszyła miniaturyzacja układów pomiarowych i ich inte-
gracja z procesorami odpowiedzialnymi za przetwarzanie sygnałów i
wnioskowanie diagnostyczne. Będzie też rozwijana niezawodna tech-
nologia zdalnego zasilania tych układów i przekazywania powstałych w
nich informacji na wyższy szczebel decyzyjny – do centrów diagno-
styczno – serwisowych. Służyć temu będą nowe, bardziej doskonałe
standardy komunikacyjne i algorytmy decyzyjne wsparte narzędziami
sztucznej inteligencji.
Rozwój zdalnego diagnozowania i serwisu systemów maszynowych
zmierza do całkowitego objęcia ich tymi działaniami oraz totalnego
nadzorowania i serwisowania opartego o prognozy.
Wyszukiwarka
Podobne podstrony:
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
6 Podrecznik2 PL
7 Podrecznik PL
6 Podrecznik1 PL
2 1Sozial podrecznik PL
APQP Podręcznik PL APQP 2
2 2Projet podrecznik PL
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
PODRĘCZNIK UŻYTKOWNIKA PL
PC 1200 Podręcznik Wzorcowy 3D PL
więcej podobnych podstron