Adam Bodnar: Wytrzymałość Materiałów. Równania fizyczne.
60
7. RÓWNANIA FIZYCZNE
7.1. Związki między stanem odkształcenia i naprężenia. I i II postać równań Hooke’a
Zależność deformacji bryły od obciążeń zewnętrznych narzuca istnienie zależności między
odkształceniami i naprężeniami. Będziemy się starali ustalić te zależności dla przestrzennych
stanów odkształcenia i naprężenia. Jest rzeczą powszechnie znaną, że konstrukcje o tej samej
geometrii, obciążeniach i więzach, wykonane z różnych materiałów, doznają różnych
deformacji więc jest oczywiste, że poszukiwane zależności muszą być oparte na
doświadczeniach.
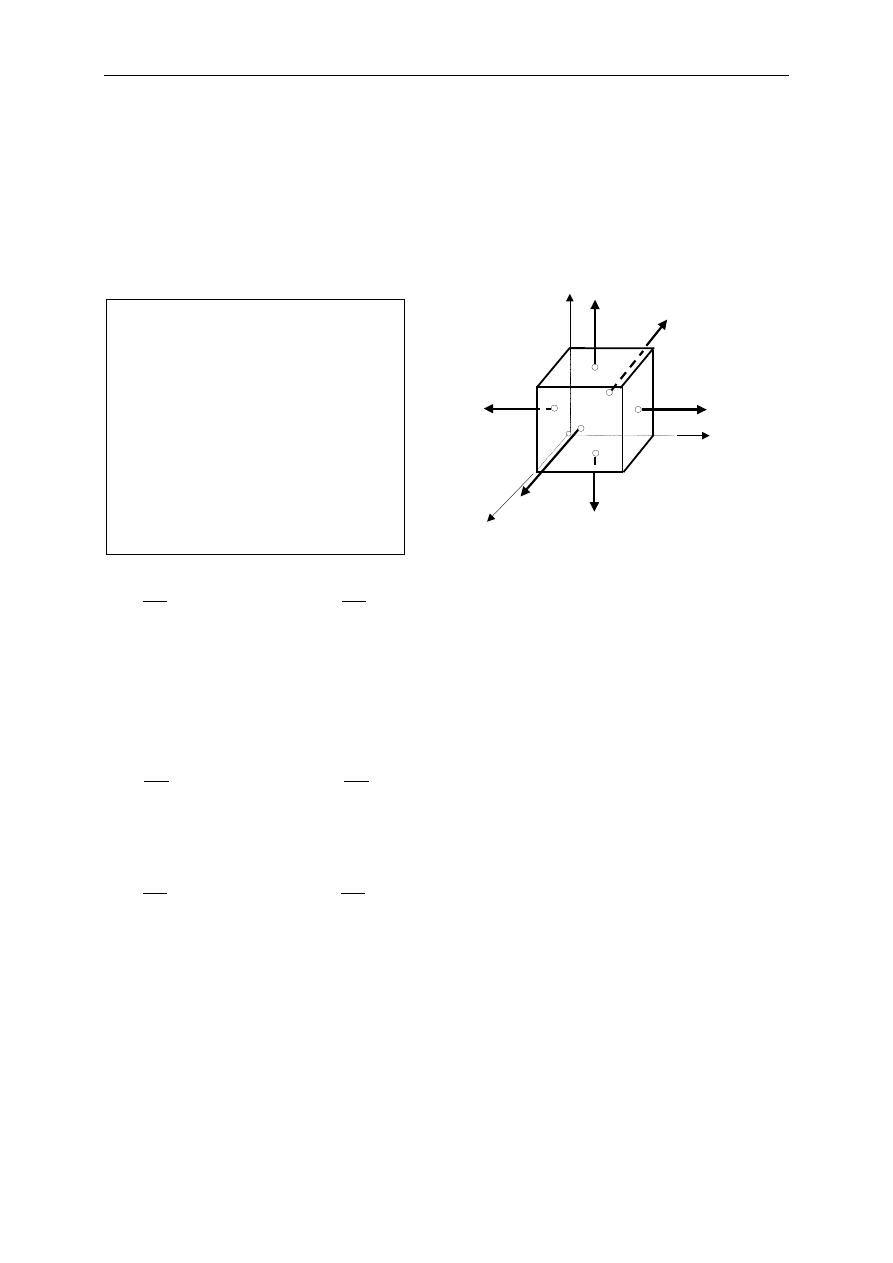
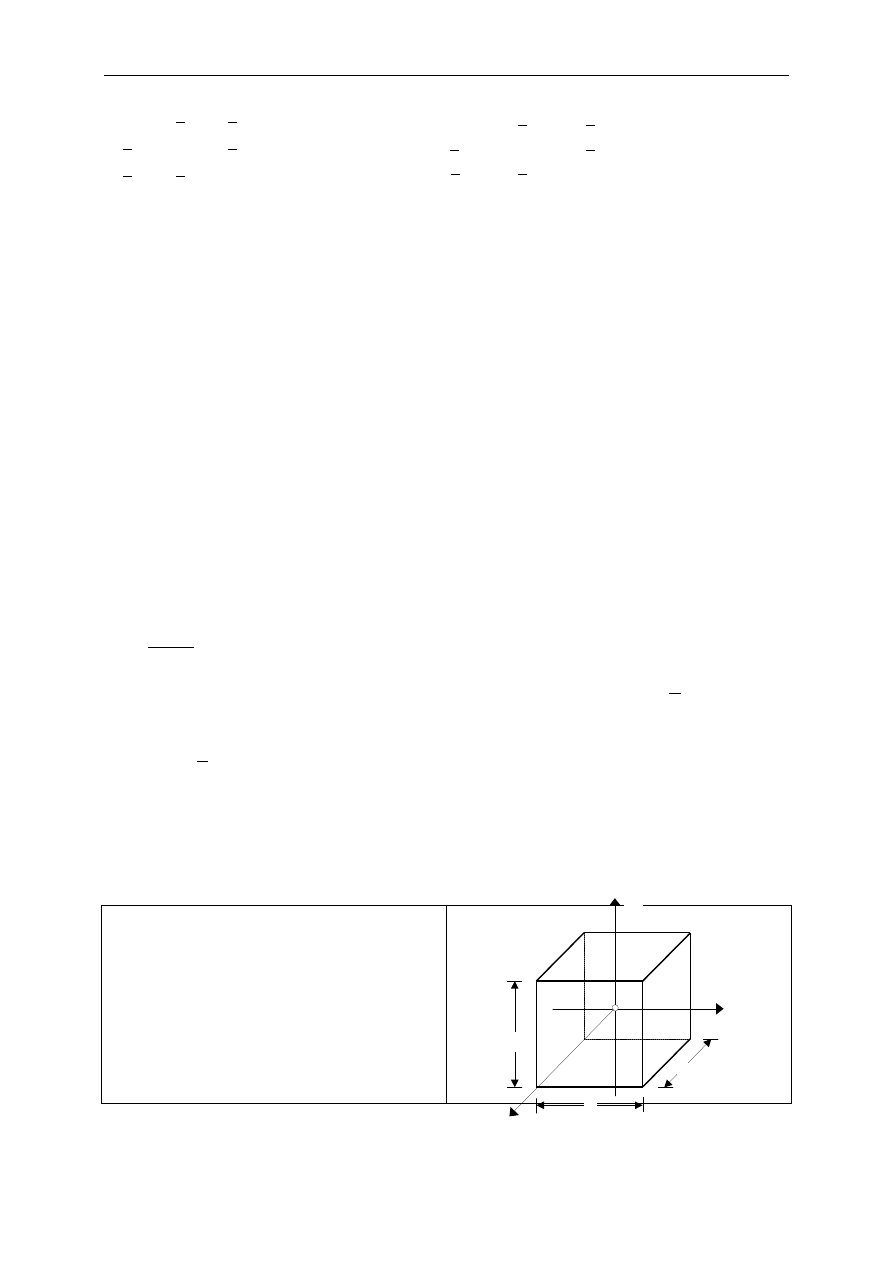
Wyobraźmy sobie dowolnie mały
sześcian o ściankach równoległych do
płaszczyzn układu współrzędnych i
poddajmy go działaniu naprężenia
normalnego
x
σ
,
równomiernie
rozłożonego na dwóch przeciwległych
ś
ciankach. Doświadczenia pokazują, że
w przypadku materiału sprężystego i
izotropowego
naprężenia
te
nie
wywołają
ż
adnych
odkształceń
kątowych sześcianu, a odkształcenia
liniowe będą miały wartości:
E
E
x
x
z
y
x
x
σ
ν
ε
ν
ε
ε
σ
ε
−
=
−
=
=
=
,
gdzie: E oraz
ν stałe materiałowe noszące odpowiednio nazwy moduł sprężystości (moduł
Younga) i liczba Poissona.
Jeżeli nasz sześcian poddamy działaniu jedynie naprężenia normalnego
y
σ
, równomiernie
rozłożonego na dwóch przeciwległych ściankach to wywoła ono jedynie odkształcenia
liniowe:
E
E
y
y
z
x
y
y
σ
ν
ε
ν
ε
ε
σ
ε
−
=
−
=
=
=
,
.
I analogicznie, przy działaniu równomiernie rozłożonego naprężenia normalnego
z
σ
,
otrzymamy:
E
E
z
z
y
x
z
z
σ
ν
ε
ν
ε
ε
σ
ε
−
=
−
=
=
=
,
.
Nasuwa się teraz pytanie, czy w przypadku jednoczesnego działania tych trzech naprężeń
liniowe odkształcenia w danym kierunku będzie można przedstawić jako sumę algebraiczną
odkształceń przy oddzielnym działaniu tych naprężeń (tzn. jako dodanie do siebie efektów
trzech jednoosiowych stanów naprężenia). Odpowiedź na to pytanie jest pozytywna,
potwierdzają ją doświadczenia i formułuje zasada superpozycji:
skutek w określonym kierunku, wywołany przez zespół przyczyn działających
równocześnie jest równy algebraicznej sumie skutków wywołanych w tym kierunku
przez każdą z przyczyn działających oddzielnie.
Należy w tym miejscu podkreślić, że stosowalność zasady superpozycji ograniczona jest
dwoma warunkami:
z
σ
x
σ
x
σ
X
Z
Y
y
σ
y
σ
z
σ
Rys. 7.1
Adam Bodnar: Wytrzymałość Materiałów. Równania fizyczne.
61
• warunkiem proporcjonalności – wymagającym, aby poszczególne skutki były liniowo
zależne od przyczyn, które je wywołały,
• warunkiem niezależności działania – wymagającym, aby żaden ze skutków nie wpływał
na sposób działania pozostałych przyczyn.
Przyjęte przez nas założenia odnośnie materiału oraz małości przemieszczeń i odkształceń
prowadzą do spełnienia tych warunków.
Tak więc, wykorzystując zasadę superpozycji możemy zapisać:
(
)
[
]
(
)
[
]
(
)
[
]
y
x
z
z
z
x
y
y
z
y
x
x
E
E
E
σ
σ
ν
σ
ε
σ
σ
ν
σ
ε
σ
σ
ν
σ
ε
+
−
=
+
−
=
+
−
=
1
1
1
(7.1)
Powyższe równania pokazują, że związki między odkształceniami liniowymi i naprężeniami
normalnymi określone są poprzez dwie stałe materiałowe E i
ν
.
Do określenia związków
między odkształceniami kątowymi i naprężeniami stycznymi mogą również służyć te same
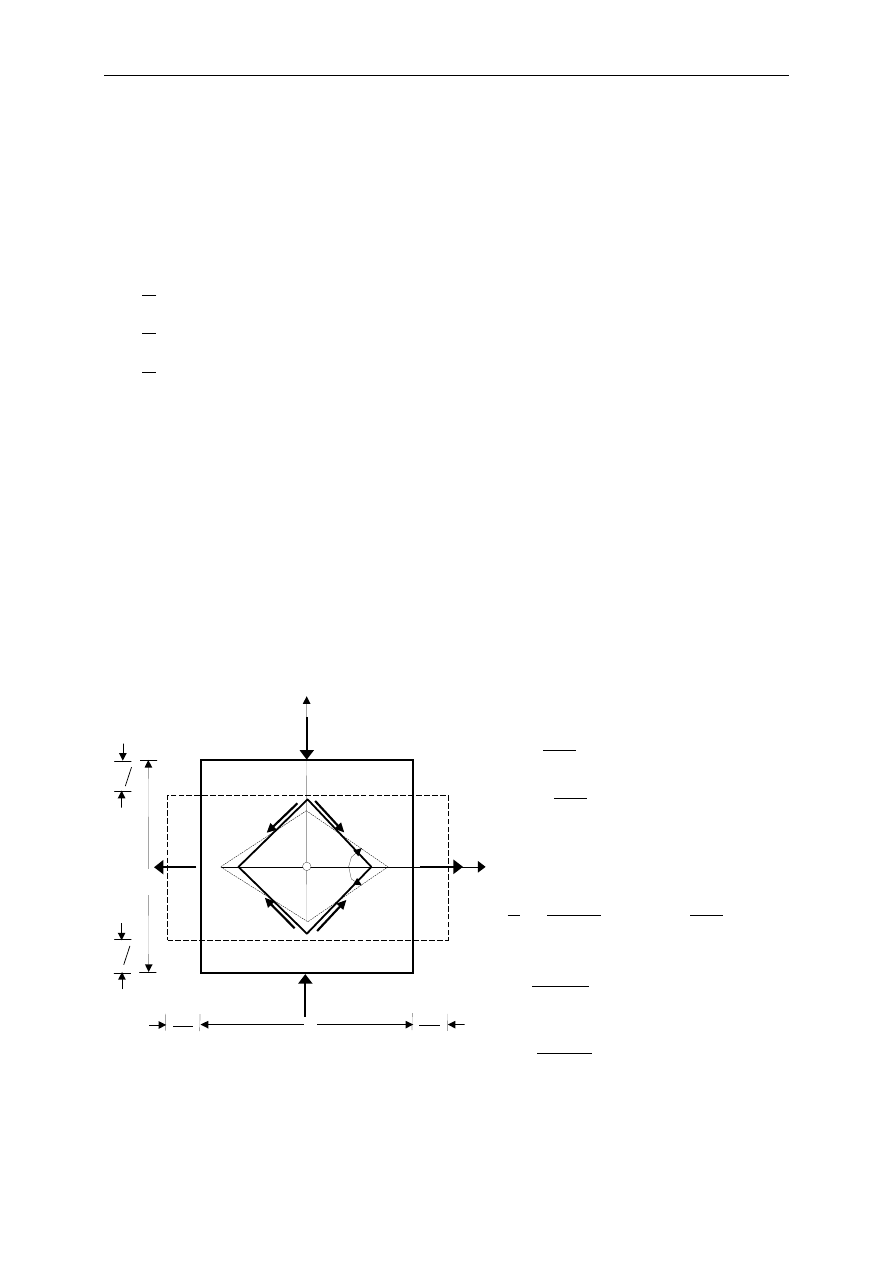
stałe. Aby tego dowieść rozważmy stan naprężenia określony macierzą :
−
=
σ
σ
σ
0
0
0
0
0
0
0
T
.
Jest to płaski stan napr
ęż
enia w płaszczy
ź
nie (Y, Z) i - jak pokazano na rys. 7.2 - na
płaszczyznach nachylonych pod k
ą
tem 45 do osi (Y, Z) wyst
ę
puj
ą
jedynie napr
ęż
enia styczne
σ
τ
=
(por. przykład 5.4.2).
Odkształcenia liniowe w kierunkach
osi układu wynosz
ą
:
σ
ν
ε
σ
ν
ε
E
E
z
y
+
−
=
+
=
1
1
,
a k
ą
towe jest rowne zeru.
Odkształcenie
k
ą
towe
γ
osi
obróconych o k
ą
t 45
° wynosz
ą
:
(
)
σ
ν
ε
ε
γ
E
z
y
+
=
−
−
−
=
1
90
sin
2
2
o
,
ale
σ
τ
=
st
ą
d:
(
)
τ
ν
γ
E
+
=
1
2
.
Oznaczaj
ą
c przez
(
)
ν
+
=
1
2
E
G
, ostatecznie mo
ż
emy
zapisa
ć
zwi
ą
zek mi
ę
dzy odkształceniem k
ą
towym i napr
ęż
eniem stycznym w formie:
σ
Y
2
z
ε
2
z
ε
γγγγ
−
o
90
σ
τ
=
σ
Y
Y
Z
1
2
y
ε
2
y
ε
1
Rys. 7.2
σ
Y
σ
Y
Adam Bodnar: Wytrzymało
ść
Materiałów. Równania fizyczne.
62
G
τ
γ
=
,
(7.2)
gdzie stała materiałowa G nazywana jest modułem
ś
cinania lub Kirchhoffa albo modułem
spr
ęż
ysto
ść
i poprzecznej.
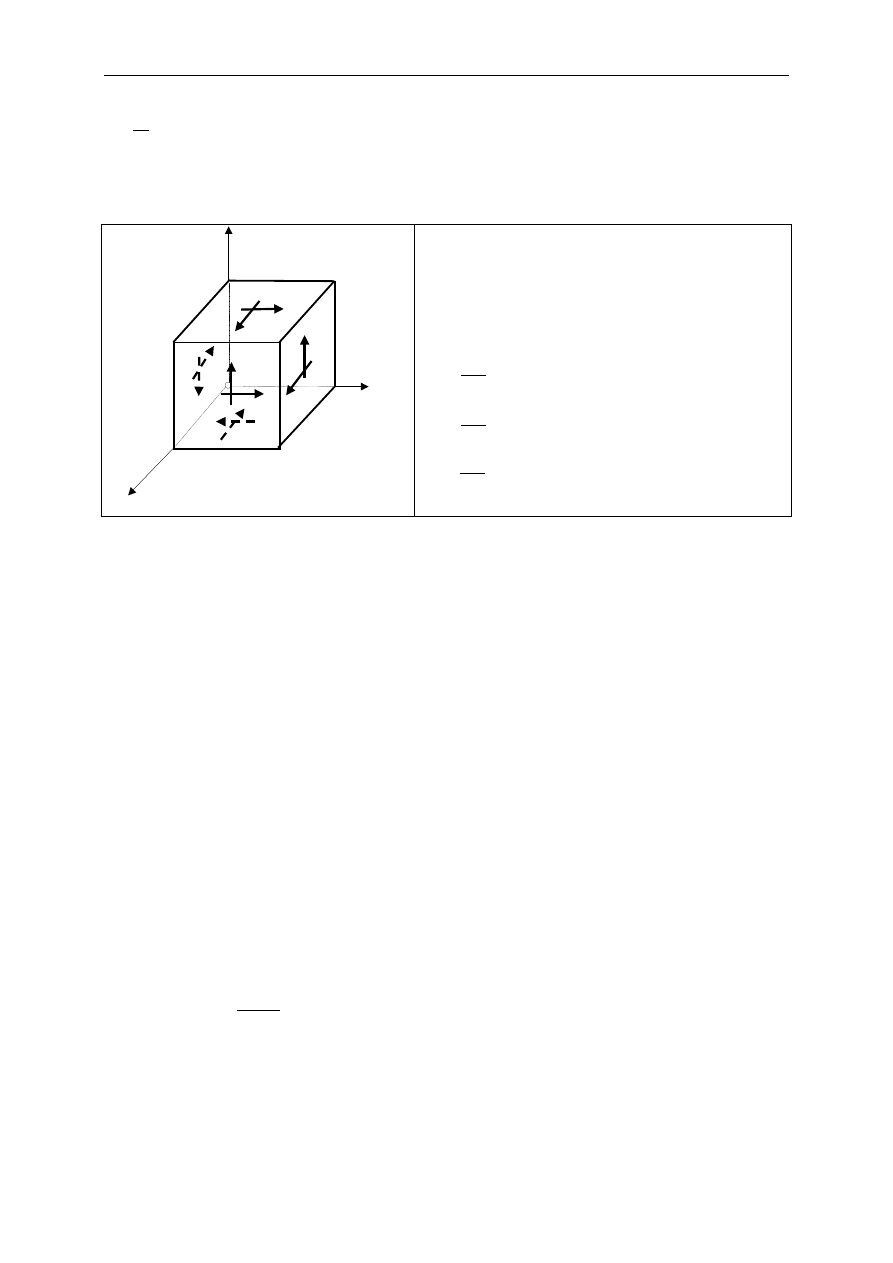
Powracaj
ą
c
do
rozwa
ż
anego
na
pocz
ą
tku
sze
ś
cianu poddajmy go teraz kolejno działaniu
równomiernie rozło
ż
onych napr
ęż
e
ń
stycznych
pokazanych na rys. 7.3. W przypadku spr
ęż
ystego
ciała izotropowego nie wywołaj
ą
one odkształce
ń
liniowych a k
ą
towe b
ę
d
ą
równe:
G
xy
xy
τ
γ
=
,
G
yz
yz
τ
γ
=
, (7.3)
G
xz
xz
τ
γ
=
.
Równania (7.1) i (7.3) okre
ś
laj
ą
ce zwi
ą
zki mi
ę
dzy odkształceniami i napr
ęż
eniami nazywaj
ą
si
ę
równaniami Hooke’a lub zwi
ą
zkami konstytutywnymi lub fizycznymi. T
ę
posta
ć
równa
ń
fizycznych w których odkszałcenia s
ą
funkcjami napr
ęż
e
ń
nazwiemy I postaci
ą
równa
ń
Hooke’a.
Poniewa
ż
rozwa
ż
amy materiały z załozenia izotropowe to wyst
ę
puj
ą
w nich tylko dwie stałe
materiałowe które nale
ż
y wyznaczy
ć
do
ś
wiadczalnie. Sposób ich wyznaczenia podany
zostanie w toku dalszych wykładów.
Udowodnimy teraz wa
ż
ne twierdzenie: w ciele spr
ęż
ystym i izotropowym kierunki napr
ęż
e
ń
głównych pokrywaj
ą
si
ę
z kierunkami odkształce
ń
głównych.
Dowód: niech osie X, Y i Z to osie głównych napr
ęż
e
ń
. Je
ś
li tak to napr
ęż
enia styczne
0
=
=
=
zx
yz
xy
τ
τ
τ
a dalej z (7.3)
0
=
=
=
zx
yz
xy
γ
γ
γ
co dowodzi,
ż
e te osie s
ą
osiami
odkształce
ń
głównych.
Aby wyprowadzi
ć
zwi
ą
zki mi
ę
dzy napr
ęż
eniami i odkształceniami nale
ż
y odwróci
ć
równania
(7.1) i (7.3). Odwrócenie tych drugich jest spraw
ą
bardzo prost
ą
. Pierwsze odwrócimy
kolejno wykonuj
ą
c:
(
)
z
y
x
x
E
σ
σ
ν
σ
ε
+
−
=
,
(
)
z
x
y
y
E
σ
σ
ν
σ
ε
+
−
=
,
(
)
y
x
z
z
E
σ
σ
ν
σ
ε
+
−
=
.
Dodanie stronami tych trzech równa
ń
daje zale
ż
no
ść
:
(
)
(
)
z
y
x
z
y
x
E
ε
ε
ε
ν
σ
σ
σ
+
+
−
=
+
+
2
1
.
(7.4)
Przekształcamy pierwsze równanie dodaj
ą
c i odejmuj
ą
c po prawej stronie:
(
)
(
)
(
)
z
y
x
x
x
x
x
z
y
x
x
E
E
σ
σ
σ
ν
σ
ν
ε
σ
ν
σ
ν
σ
σ
ν
σ
ε
+
+
−
+
=
→
+
−
+
−
=
1
Wstawienie (7.4) daje:
yx
τ
xz
τ
xy
τ
yz
τ
zy
τ
zx
τ
X
Z
Y
Rys. 7.3
Adam Bodnar: Wytrzymało
ść
Materiałów. Równania fizyczne.
63
(
)
+
+
−
+
+
=
z
y
x
x
x
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
i post
ę
puj
ą
c analogicznie z nast
ę
pnymi napr
ęż
eniami
normalnymi dostajemy równania wi
ążą
ce je z odkształceniami liniowymi.
II posta
ć
równa
ń
fizycznych Hooke’a :
(
)
+
+
−
+
+
=
z
y
x
x
x
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
(
)
+
+
−
+
+
=
z
y
x
y
y
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
(7.5)
(
)
+
+
−
+
+
=
z
y
x
z
z
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
zx
zx
yz
yz
xy
xy
G
G
G
γ
τ
γ
τ
γ
τ
=
=
=
,
,
7.2. III postać równań Hooke’a - prawo zmiany objętości i prawo zmiany postaci
Przyjmijmy na mocy definicji:
3
z
y
x
m
def
ε
ε
ε
ε
+
+
=
,
3
z
y
x
m
def
σ
σ
σ
σ
+
+
=
(7.6)
jako odkształcenie
ś
rednie i napr
ęż
enie
ś
rednie. Przy tych oznaczeniach wzór (7.4) mo
ż
emy
zapisa
ć
w formie:
m
m
K
ε
σ
3
=
(7.7)
gdzie:
(
)
ν
2
1
3
−
=
E
K
jest stał
ą
materiałow
ą
i nazywana jest modułem obj
ę
to
ś
ciowej
ś
ci
ś
liwo
ś
ci spr
ęż
ystej lub modułem Helmholtza.
Dokonajmy rozkładu macierzy napr
ęż
e
ń
na dwie cz
ęś
ci
σ
σ
σ
Α
Τ
D
+
=
z
zy
zx
yz
y
yx
xz
xy
x
σ
τ
τ
τ
σ
τ
τ
τ
σ
=
m
m
m
σ
σ
σ
0
0
0
0
0
0
−
−
−
+
m
z
zy
zx
yz
m
y
yx
xz
xy
m
x
σ
σ
τ
τ
τ
σ
σ
τ
τ
τ
σ
σ
gdzie:
σ
Α
- aksjator napr
ęż
e
ń
,
σ
D
- dewiator napr
ęż
e
ń
;
i analogicznie macierzy odkształce
ń
:
ε
ε
ε
Α
Τ
D
+
=
Adam Bodnar: Wytrzymało
ść
Materiałów. Równania fizyczne.
64
z
zy
zx
yz
y
yx
xz
xy
x
ε
γ
γ
γ
ε
γ
γ
γ
ε
2
1
2
1
2
1
2
1
2
1
2
1
=
m
m
m
ε
ε
ε
0
0
0
0
0
0
−
−
−
+
m
z
zy
zx
yz
m
y
yx
xz
xy
m
x
ε
ε
γ
γ
γ
ε
ε
γ
γ
γ
ε
ε
2
1
2
1
2
1
2
1
2
1
2
1
gdzie:
ε
Α
- aksjator odkształce
ń
,
ε
D
- dewiator odkształce
ń
.
Łatwo sprawdzi
ć
,
ż
e zachodz
ą
poni
ż
sze zwi
ą
zki mi
ę
dzy aksjatorami i dewiatorami napr
ęż
e
ń
i
odkształce
ń
:
ε
σ
Α
Α
K
3
=
,
(7.8)
ε
σ
D
G
D
2
=
,
(7.9)
które stanowi
ą
III posta
ć
równa
ń
Hooke’a i nosz
ą
nazwy prawa zmiany obj
ę
to
ś
ci i prawa
zmiany postaci.
Uzasadnienie tych nazw nie jest trudne. Działanie aksjatora napr
ęż
e
ń
wywołuje jedynie
zmian
ę
obj
ę
to
ś
ci, a odkształcenia postaciowe s
ą
równe zeru. Natomiast pod działaniem
dewiatora napr
ęż
e
ń
powstaj
ą
odkształcenia postaciowe, a suma odkształce
ń
liniowych na
przek
ą
tnej dewiatora odkształce
ń
jest równa zeru, co dowodzi,
ż
e nie ma zmiany obj
ę
to
ś
ci.
Wró
ć
my jeszcze do równania (7.7). Wykorzystuj
ą
c,
ż
e zmiana obj
ę
to
ś
ci jest równa:
m
z
y
x
D
ε
ε
ε
ε
3
=
+
+
=
,
mo
ż
emy zapisa
ć
:
m
E
D
σ
ν
2
1
3
−
=
.
Je
ś
li
0
>
m
σ
, to oczywi
ś
cie D>0, a wi
ę
c musi zachodzi
ć
: 1-2
ν
> 0,
czyli
2
1
≤
ν
νν
ν
.
Maksymalna zmiana obj
ę
to
ś
ci b
ę
dzie zachodzi
ć
dla materiału którego
0
=
ν
νν
ν
, materiał
którego
2
1
=
ν
jest nie
ś
ci
ś
liwy. Guma ma liczb
ę
Poissona blisk
ą
0.5, a korek blisk
ą
0.
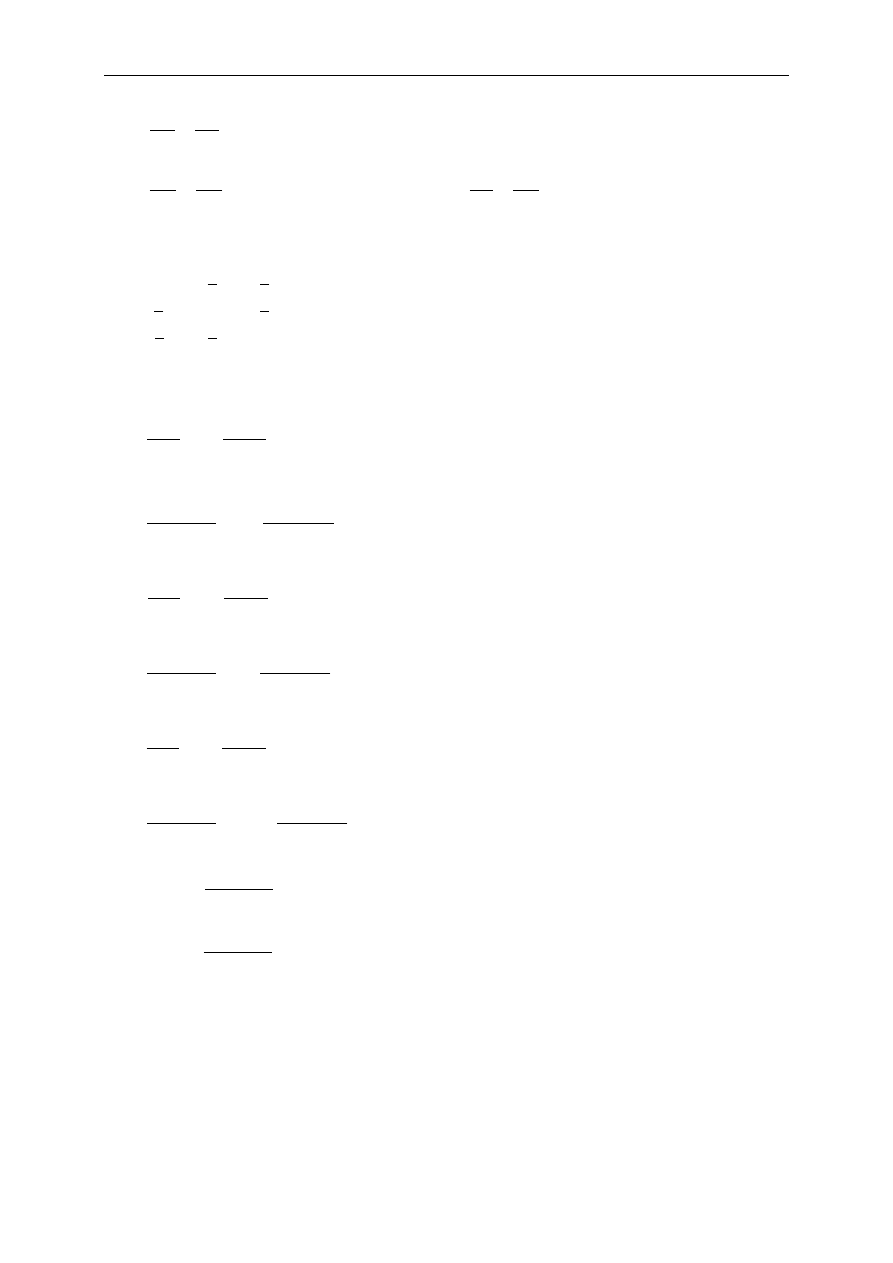
7.3. Przykłady
Przykład 7.3.1.
Jakie obci
ąż
enie sze
ś
cianu o boku a wykonanego z materiału spełniaj
ą
cego
równania Hooke’a, powoduje przemieszczenia dowolnego jego punktu okre
ś
lone funkcjami:
,
,
,
z
C
w
y
C
v
x
C
u
−
=
−
=
−
=
je
ś
li stałe materiałowe s
ą
równe E i
ν.
a
X
a
a
Z
Y

Adam Bodnar: Wytrzymało
ść
Materiałów. Równania fizyczne.
65
Rozwiązanie
Z równa
ń
Cauchy’ego łatwo wyznaczy
ć
,
ż
e odkształcenia liniowe s
ą
równe
C
z
y
x
−
=
=
=
ε
ε
ε
a odkształcenia k
ą
towe równaj
ą
si
ę
zeru
0
=
=
=
zy
xz
xy
γ
γ
γ
Odpowiadaj
ą
ce im współrz
ę
dne tensora napr
ęż
e
ń
s
ą
równe
0
=
=
=
−
=
=
=
zy
xz
xy
z
y
x
BC
τ
τ
τ
σ
σ
σ
gdzie :
(
)
ν
2
1
−
=
E
B
.
Obci
ąż
enie
ś
cianek sze
ś
cianu wyznaczymy ze statycznych warunków brzegowych.
Ś
cianki
2
a
x
±
=
, współrz
ę
dne wersora normalnego zewn
ę
trznego
0
,
1
=
=
±
=
n
m
l
.
0
,
=
=
=
vz
vy
vx
q
q
BC
q
m
.
Ś
cianki
2
a
y
±
=
, współrz
ę
dne wersora normalnego zewn
ę
trznego
0
,
1
=
=
±
=
n
l
m
.
0
,
=
=
=
vz
vx
vy
q
q
BC
q
m
.
Ś
cianki
2
a
z
±
=
, współrz
ę
dne wersora normalnego zewn
ę
trznego
0
,
1
=
=
±
=
m
l
n
.
0
,
=
=
=
vy
vx
vz
q
q
BC
q
m
.
Tak wi
ę
c
ś
cianki sze
ś
cianu obci
ąż
one s
ą
równomiernie rozło
ż
onym obci
ąż
eniem
ś
ciskaj
ą
cym
o intensywno
ś
ci BC.
Przykład 7.3.2.
Dane s
ą
funkcje przemieszcze
ń
w konstrukcji wykonanej z materiału
liniowo spr
ęż
ystego:
(
)
4
10
*
1
.
0
5
−
+
=
xy
u
m,
(
)
4
10
*
1
.
0
−
−
=
xy
y
v
m,
(
)
4
2
2
10
*
−
−
=
z
x
w
m,
wyznaczy
ć
macierz odkształce
ń
i napr
ęż
e
ń
w punkcie
(
)
1
,
2
,
1
−
A
m, je
ś
li moduł Younga
E =
205 GPa i liczba Poissona
ν = 0.3.
Rozwiązanie
Z równa
ń
geometrycznych Cauchy’ego wyznaczymy funkcje odksztace
ń
a po wstawieniu do
nich wspólrz
ę
dnych punktu A otrzymamy warto
ś
ci wyst
ę
puj
ą
cych w nim odkształce
ń
:
4
4
10
*
2
.
0
10
*
1
.
0
−
−
=
=
∂
∂
=
y
x
u
x
ε
,
(
)
4
4
10
*
1
.
1
10
*
1
.
0
0
.
1
−
−
=
−
=
∂
∂
=
x
y
v
y
ε
,
4
4
10
*
0
.
2
10
*
2
−
−
−
=
−
=
∂
∂
=
z
z
w
z
ε
,
Adam Bodnar: Wytrzymało
ść
Materiałów. Równania fizyczne.
66
(
)
4
4
10
*
3
.
0
10
*
1
.
0
1
.
0
−
−
−
=
−
=
∂
∂
+
∂
∂
=
y
x
x
v
y
u
xy
γ
,
4
4
10
*
0
.
2
10
*
2
−
−
−
=
=
∂
∂
+
∂
∂
=
x
x
w
w
u
xz
γ
,
0
=
∂
∂
+
∂
∂
=
y
w
z
v
yz
γ
.
Macierz odkształce
ń
ma posta
ć
:
4
2
1
2
1
2
1
2
1
2
1
2
1
10
*
0
.
2
0
0
.
1
0
1
.
1
15
.
0
0
.
1
15
.
0
2
.
0
−
−
−
−
−
−
=
=
z
zy
zx
yz
y
yx
xz
xy
x
T
ε
γ
γ
γ
ε
γ
γ
γ
ε
ε
.
Napr
ęż
enia wyznaczymy korzystaj
ą
c z II postaci równa
ń
Hooke’a:
(
)
=
+
+
−
+
+
=
z
y
x
x
x
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
(
)
125
.
5
10
*
0
.
2
1
.
1
2
.
0
3
.
0
*
2
1
3
.
0
2
.
0
3
.
0
1
10
*
205
4
9
−
=
−
+
−
+
+
=
−
MPa,
(
)
=
+
+
−
+
+
=
z
y
x
y
y
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
(
)
067
.
9
10
*
0
.
2
1
.
1
2
.
0
3
.
0
*
2
1
3
.
0
1
.
1
3
.
0
1
10
*
205
4
9
=
−
+
−
+
+
=
−
MPa,
(
)
=
+
+
−
+
+
=
z
y
x
x
z
E
ε
ε
ε
ν
ν
ε
ν
σ
2
1
1
(
)
817
.
39
10
*
0
.
2
1
.
1
2
.
0
3
.
0
*
2
1
3
.
0
0
.
2
3
.
0
1
10
*
205
4
9
−
=
−
+
−
+
−
+
=
−
MPa,
(
)
(
)
365
.
2
10
*
3
.
0
3
.
0
1
2
10
*
205
4
9
−
=
−
+
=
=
−
xy
xy
G
γ
τ
MPa,
(
)
(
)
769
.
15
10
*
0
.
2
3
.
0
1
2
10
*
205
4
9
−
=
−
+
=
=
−
xz
xz
G
γ
τ
MPa,
0
=
=
yz
yz
G
γ
τ
.
Macierz napr
ęż
e
ń
przedstawia si
ę
wi
ę
c nast
ę
puj
ą
co:
−
−
−
−
−
−
=
=
817
.
39
0
769
.
15
0
067
.
9
365
.
2
769
.
15
365
.
2
125
.
5
z
zy
zx
yz
y
yx
xz
xy
x
T
σ
τ
τ
τ
σ
τ
τ
τ
σ
σ
MPa.
Wyszukiwarka
Podobne podstrony:
Matematyka I (Ćw), Lista 07. Równania płaszczyzny i prostej
Chemia fizyczna 07, chemia fizyczna, chemia, FIZYCZNA, 7, Ćwiczenie 07
RÓWNANIA FIZYCZNE
1.07 dymorfizm plciowy czlowieka i jego przejawy w rozwoju fizycznym i motoryczny, Magdalena Błaszcz
lab 07 wyprowadzanie równań ruchu2
lab 07 wyprowadzanie równań ruchu
Program wykladow 07 - 08, Farmacja, Chemia Fizyczna, zadania
Równanie soczewki, fizyczka
Notatki z neta, notatek pl zaleznosci wyrazajace wzor brunsa oraz podstawowe rownanie geodezji fizyc
Pomiar ciepła spalania, pwr biotechnologia(I stopień), III semestr, Chemia fizyczna - laboratorium,
lab 07 wyprowadzanie równań ruchu2
07 Badanie wlasciwosci fizyczny Nieznany (2)
zwiazki fizyczne, A T e o r i a S p r ę ż y s t o ś c i, T E M A T Y B L O K O W E, V Równania ko
więcej podobnych podstron