Mam pytania w sprawie wzmacniacza na TDA 1562:
1. Czy zamiast dwóch kondensatorów 4700
µ
F można za-
łożyć 2 razy większe – 4 takie same, po dwa połączone rów-
nolegle 2x(2x4700
µ
F)? Czy pojemność 9400
µ
F lub
10000
µ
F będzie bezpieczna?
2. Napięcie robocze jest 8-18V, natomiast napięcie dopu-
szczalne jest 0-30V a chwilowe 45V. U mnie pracuje w sa-
mochodzie 12V. Czy zbudowanie odpowiednio wydajnej
prądnicy 10A na napięcie 20-30V polepszy wydajność
wzmacniacza?
3. Czy można taki wzmacniacz podłączyć pod 2 szeregowe
akumulatory 2x12V?
4. Czy podwójne kondensatory i zasilanie z dodatkowego
akumulatora (2 akumulatory ładowane alternatorem
24V) lub przetwornicy mogą zniszczyć wzmacniacz lub
wpłynąć na jego nieprawidłową pracę?
5. Czy zbudowanie niewielkiego przedwzmacniacza z od-
powiednich filtrów dolnoprzepustowych poprawi wydaj-
ność SUBWOOFERA?
Ad 1. Można zwiększyć pojemność kondensatorów. Warto jednak
wypróbować w praktyce wartości zalecane fabrycznie i sprawdzić,
czy zwiększanie pojemności da jakikolwiek zauważalny efekt. Jeśli
na słuch nie można wykryć różnicy, można nie stosować dodatko-
wych elementów.
Ad 2. Wzmacniacze samochodowe są często tak konstruowane,
że dodatkowy obwód monitoruje wartość napięcia zasilania. Wyłą-
cza wzmacniacz wtedy, gdy napięcie jest zbyt niskie, poniżej 8V, co
zapobiega np. całkowitemu rozładowaniu akumulatora. Wyłącza też
wzmacniacz po przekroczeniu napięcia 18V, żeby przy dużych na-
pięciach i prądach nie uszkodzić wzmacniacza czy współpracują-
cych obwodów. Wzmacniacz z takim zabezpieczeniem NIE BĘ-
DZIE PRACOWAŁ PRZY NAPIĘCIACH POWYŻEJ 18V. Nato-
miast podany w katalogu zakres napięć dopuszczalnych 0...30V to
tylko gwarancja, że wzmacniacz nie ulegnie uszkodzeniu na przy-
kład przy podłączeniu szeregowo dwóch akumulatorów. (Niektórzy
stosują takie drastyczne i ryzykowne metody zimą: łączą na chwilę
prowizorycznie dwa akumulatory w szereg, żeby uruchomić silnik.
Gdy silnik zostanie uruchomiony, chwilę popracuje i się rozgrzeje,
powracają do normalnego napięcia 12V. Metoda jest ryzykowna, bo
można w ten sposób uszkodzić elementy, np. żarówki, ale radio sa-
mochodowe z takim wzmacniaczem mocy nie powinno zostać
uszkodzone). Z kolei podane maksymalne napięcie chwilowe
45V wskazuje, że wzmacniacz nie powinien ulec uszkodzeniu pod
wpływem chwilowych przepięć w instalacji, jakie mogą pojawiać się
w trakcie normalnej eksploatacji.
Ad 3. Ad 4. W związku z powyższym opisem – nie ma sensu
zwiększanie zasilania powyżej 18V, bo wzmacniacz nie będzie praco-
wał, ponieważ nie jest możliwe wyłączenie opisanego wbudowanego
zabezpieczenia. Nawet gdyby było to możliwe, nie ma sensu próba
uzyskania ze wzmacniacza samochodowego mocy dużo większej od
nominalnej z uwagi na krytyczny problem rezystancji termicznej
wzmacniacza. Na przykład próba uzyskania dużej mocy wyjściowej
przez zmniejszenie oporności obciążenia spowoduje szybki rozgrza-
nie struktury i zadziałanie zabezpieczenia termicznego.
Ad 5. Wydajność subwoofera nie zależy od filtrów i przedwzmac-
niaczy. Filtr ograniczający pasmo ma wpływ na ogólny efekt dźwię-
kowy i można go dobrać według uznania.
- Chciałbym zbudować falownik 50Hz na 100Hz do ko-
siarki elektrycznej, w której znajduje się silnik 0,4kW
z kondensatorem, by podnieść prędkość z 1450 obr/min na
2800 obr/min. Oto moje założenia (...)
- Potrzebuję informacji o układzie ICL7106 (dokładnie ilu
jest bitowy), ponieważ jest mi to potrzebne do pracy dyplo-
mowej, a informacji tych nie mogę nigdzie znaleźdź.
Z góry dziękuję.
- Od ponad roku zajmuję się programowaniem proceso-
rów Atmelowskich i chciałbym wiedzieć, czy do takiego
procesora (np. AT90S8535) można dołączyć zewnętrzną
pamięć RAM (taką od starego PC-ta np. SIMM). Jeśli
można, to bardzo proszę o jakiś schemat lub opis, jak to
podłączyć i jak obsługiwać z procesorka. Oprócz tego bar-
dzo proszę, jeśli to możliwe, o przesłanie mi not katalogo-
wych takich pamięci.
Podobnych uprzejmych próśb o recenzję idei, pomysłu czy schematu
i o materiały katalogowe nadchodzi do redakcji bardzo wiele. Znacz-
na ich część, nawet większość, pochodzi od osób młodych i niedo-
świadczonych, które trzeba byłoby uczyć podstaw elektronicznego
rzemiosła. W przypadku pierwszego pytania błąd polega na pomyśle
przepuszczenia wyprostowanego napięcia sieci, czyli tętniącego
przebiegu o częstotliwości 100Hz przez uzwojenie transformatora –
ogromna składowa stała spowodowałaby szybkie przegrzanie
i uszkodzenie go. Budowa falownika to na pewno nie jest zadanie dla
początkujących.
10
Elektronika dla Wszystkich
Skrzynka
Porad
W rubryce przedstawiane są odpowiedzi na pytania nade-
słane do Redakcji. Są to sprawy, które, naszym zdaniem,
zainteresują szersze grono Czytelników.
Jednocześnie informujemy, że Redakcja nie jest w stanie
odpowiedzieć na wszystkie nadesłane pytania, dotyczą-
ce różnych drobnych szczegółów.
W przypadku drugiego pytania odpowiedź jest oczywista:
ICL7106, w przeciwieństwie do ICL7109, nie jest przeznaczony do
pracy w systemie mikroprocesorowym, więc w katalogu rzeczywi-
ście nie ma informacji o liczbie bitów, a rozdzielczość określona jest
inaczej – jest to przetwornik 3,5-cyfrowy o rozdzielczości 1/2000
(1/4000 uwzględniając obie biegunowości napięcia wejściowego).
Autorowi trzeciego pytania nadesłanego e-mailem można pora-
dzić, żeby wskazówek szukał w obszernych zasobach Internetu (ma-
teriały katalogowe, zwłaszcza noty aplikacyjne producenta, grupy
dyskusyjne, liczne projekty osób trzecich). Osoba mająca dostęp do
sieci może to szybko i sprawnie zrobić sama, nie musi liczyć na po-
moc redakcji.
Niestety, naprawdę nie jesteśmy w stanie odpowiedzieć na wszy-
stkie tego typu pytania. Ciężko pracujące grono redakcyjne nie może
poświęcić ogromnej ilości czasu na wyszukiwanie materiałów katalo-
gowych oraz na indywidualną naukę wybranych Czytelników. Temu
celowi poświęcona jest Szkoła Konstruktorów.
Na początku chciałem pozdrowić całą redakcję EdW.
Chcę zbudować prostownik służący do ładowania akumu-
latorów samochodowych, posiadam kit AVT-1007 „regu-
lator obrotów silnika” i nie wiem, czy można użyć go na
stronie pierwotnej transformatora jako regulator prądu
ładowania.
Dobrze zaprojektowany regulator fazowy nie powinien ulec uszko-
dzeniu przy próbach, jednak taka metoda regulacji rzadko daje dobre
wyniki. Regulacja fazowa po stronie pierwotnej transformatora nie
jest łatwa i mało który regulator radzi sobie z takim zadaniem. Przy-
czyną problemów jest indukcyjność transformatora i występujące
w niej opóźnienie prądu względem napięcia. Praktyka pokazuje, że
niektóre regulatory fabryczne są w tym względzie znacznie lepsze od
innych. Wiele zależy jednak od samego prostownika, zwłaszcza od
właściwości transformatora, a nawet akumulatora.
Poszukuję sposobu pobudzenia do pracy czujnika pod-
czerwieni pasywnej, ale bez interwencji w układ (firma
nadzorująca nie dopuszcza żadnej ingerencji w układ
alarmu). (...) czujnik ten próbowałem pobudzić diodą
LED IRED, pilotem TV modulowanym 32kHz, bez rezul-
tatu.
Czujniki podczerwieni pasywnej (PIR) istotnie reagują na promienio-
wanie podczerwone. Trzeba jednak pamiętać, że promieniowanie
podczerwone obejmuje bardzo szeroki zakres częstotliwości. Czujni-
ki nie reagują na promieniowanie podczerwone bliskie światłu wi-
dzialnemu, a właśnie takie wytwarzają diody IRED. Reagują na pro-
mieniowanie cieplne o znacznie większej długości fali. Nie jest tu po-
trzebna żadna modulacja, tylko ruch lub symulacja ruchu obiektu róż-
niącego się temperaturą od otoczenia. Czujniki PIR nie reagują jed-
nak na powolne zmiany temperatury. Układ sprawdzający czujnik
musi więc zawierać elementy w miarę szybko zmieniające swą tem-
peraturę. W najprostszym przypadku może to być żarówka lub dwie
lub więcej kolejno włączanych żarówek, ewentualnie inny system,
gdzie następują zmiany temperatury symulujące ruch. Trudno tu po-
dać recepty, ponieważ poszczególne czujki PIR mają mniej lub bar-
dziej inteligentne obwody obróbki sygnału eliminujące fałszywe alar-
11
Skrzynka porad
Elektronika dla Wszystkich
12
Elektronika dla Wszystkich
Konkurs
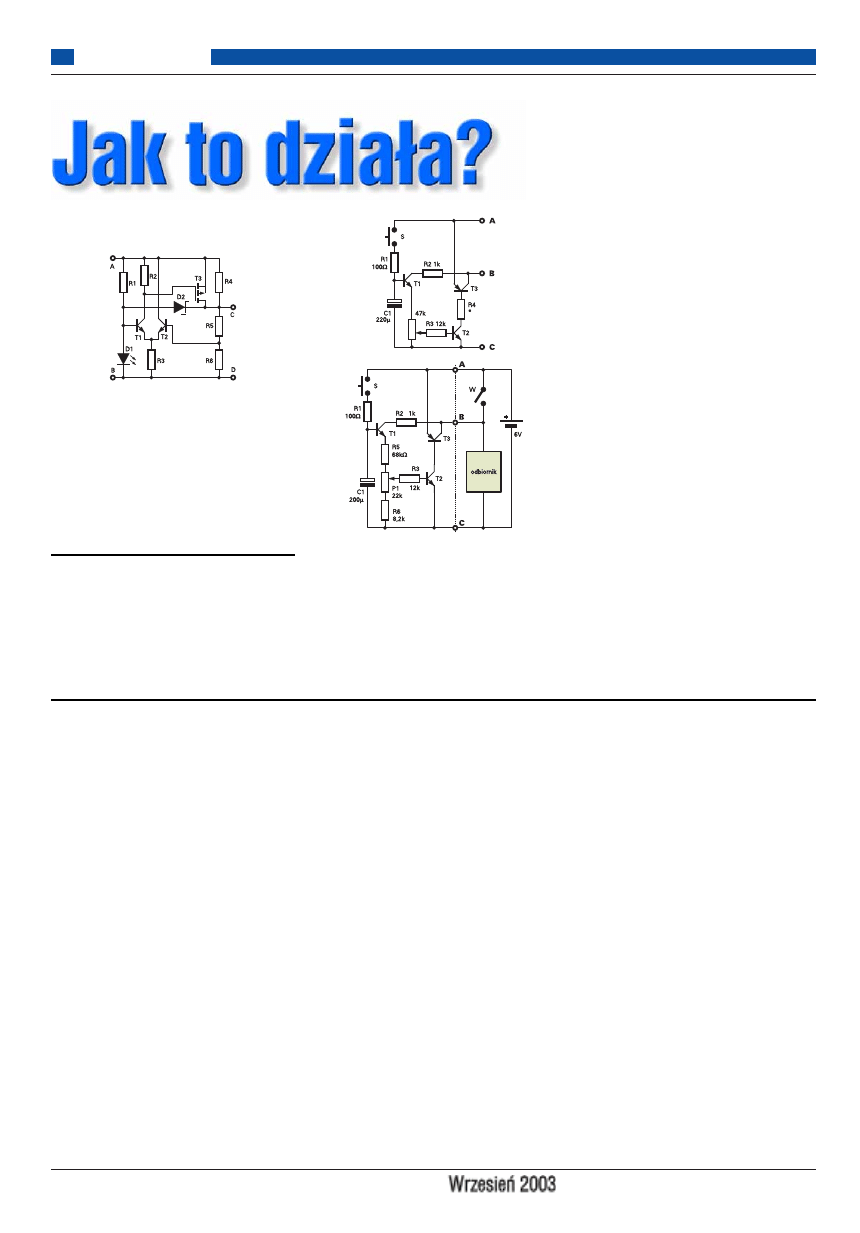
Na rysunku przedstawiony jest układ z trze-
ma tranzystorami.
Jak zwykle zadanie konkursowe polega
na rozszyfrowaniu
Jak działa i do czego służy taki
układ?
Odpowiedzi, koniecznie oznaczone dopi-
skiem Jak09, należy nadsyłać w terminie 45
dni od ukazania się tego numeru EdW. Na-
grodami w konkursie będą kity AVT lub
książki.
Rozwiązanie zadania
z EdW 5/2003
Przedstawiony układ z trzema tranzystorami to
wyłącznik czasowy baterii. Pełny oryginalny
schemat pokazany jest na rysunku poniżej.
Według opisu układ po naciśnięciu przy-
cisku S włącza odbiornik na kilkadziesiąt
minut.
Układ będzie działać, ale konstrukcja nie
jest godna szerokiego rozpowszechnienia.
Dołączenie kolektora T1 nie do obwodu ba-
terii (A), tylko do wyjścia (B) sugeruje, że
uzyskane tak dodatnie sprzężenie zwrotne
zagwarantuje skokowe, a nie płynne wyłą-
czenie. Owszem, takie połączenie trochę po-
może, ale tylko w ostatniej fazie wyłączania,
a to z uwagi, że T1 pracuje jako wtórnik
emiterowy i zmiany napięcia kolektora nie
mają praktycznego wpływu na napięcie na
emiterze, o ile tylko napięcie kolektor-emiter
jest większe od 1V.
Dodatkową wadą układu jest też pozosta-
wienie „elektrolita” C1 w spoczynku bez
napięcia, co przy sporadycznym korzystaniu
z układu zaowocuje radykalnym skróceniem
czasu włączenia. Kolejną słabą stroną jest za-
leżność odmierzanego czasu od wzmocnie-
nia prądowego tranzystora T1. W oryginal-
nym układzie ewidentnym błędem jest też
brak rezystora R4 umieszczonego w obwo-
dzie bazy T3 - porównaj oba schematy. Obe-
cność rezystora R4 jest niezbędna, żeby prze-
wodzący tranzystor T2 nie wyładowywał ba-
terii dużym prądem płynącym przez złącze
E-B tranzystora T3. Przy ustawieniu poten-
cjometru P1 w „górnym” położeniu, prąd
bazy T2 podczas naciskania przycisku S wy-
niesie ponad 70
µA, co przy dużym wzmoc-
nieniu T2 da prąd kolektora T2 sięgający
20mA. Dobrany rezystor R4 powinien go
ograniczyć do wartości wystarczającej do
pełnego wysterowania T3.
Wszystkie nadesłane odpowiedzi były
poprawne. Nagrody książkowe otrzymują:
Tomasz Dziwiński - Rybnik, Tomasz
Kotliński - Syców, Rafał Sepołowicz - War-
szawa.
Dźwięk dzwonka szkolnego, szczególnie te-
go pierwszego, przez większość uczniów nie
jest lubiany. Bardziej pozytywne emocje wy-
wołuje dzwonek będący tym ostatnim, koń-
czącym ostatnią lekcję, a jeszcze bardziej po-
zytywne odczucia daje dzwonek oznajmiają-
cy koniec roku szkolnego. Dlaczego tak jest,
wie każdy, kto chodzi lub chodził do szkoły.
Jeśli jesteś uczniem i chcesz zostać docenio-
ny przez ciało pedagogiczne, możesz wyko-
nać na rzecz szkoły bardzo pożyteczne urzą-
dzenie, które zostało opisane w artykule. Jest
to automat, którego zadaniem jest włączanie
dzwonka w chwilach rozpoczęcia lub zakoń-
czenia przerw i lekcji. Urządzeniem steruje
mikroprocesor, w związku z czym posiada
nieskomplikowaną budowę. Jest odporne na
zaniki napięcia sieciowego oraz posiada wy-
godny interfejs obsługi. Programowanie ste-
rownika jest bardzo proste i przypomina na-
stawianie zegarka elektronicznego. Urządze-
nie bardzo dobrze nadaje się na temat pracy
dyplomowej.
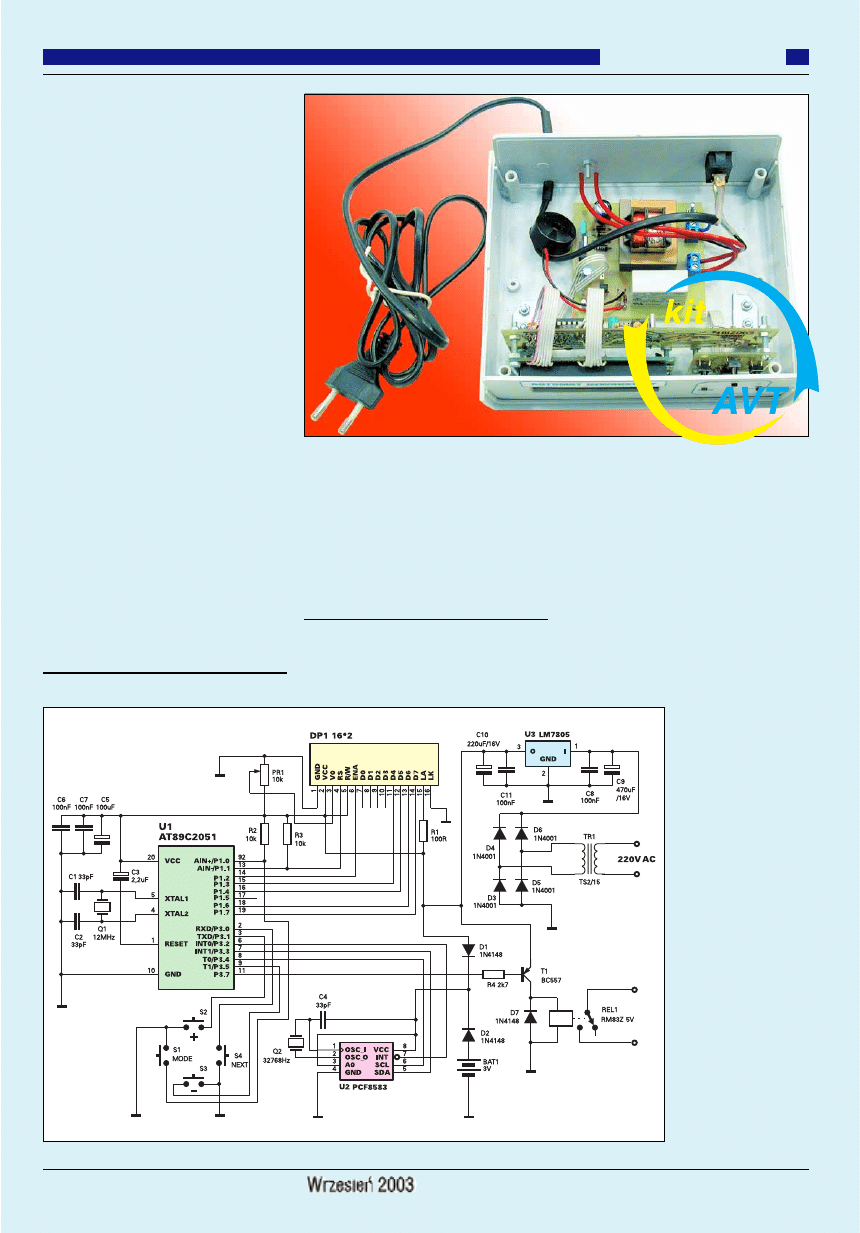
Opis układu
Schemat ideowy układu pokazany jest na ry-
sunku 1. Pracą urządzenia steruje doskonale
znany Czytelnikom EdW mikroprocesor
AT89C2051. Ponieważ urządzenie musi być
odporne na zaniki napięcia w sieci energe-
tycznej, konieczne okazało się zastosowanie
odrębnego układu zegara czasu rzeczywiste-
go, który będzie działał mimo braku zasilania
ze strony sieci. Implementacja zegara w pro-
gramie mikroprocesora byłaby oczywiście
lepszym rozwiązaniem, ale na przeszkodzie
stoi sposób jego awaryjnego zasilania, który
w stanie pracy pobiera kilka mA prądu. Układ
RTC został zrealizowany w oparciu o popu-
larną kostkę Philipsa – PCF8583. W razie
braku napięcia sieci (awaria sieci lub po pro-
stu wyjęcie wtyczki z gniazda) zegar RTC za-
silany jest z dodatkowej baterii litowej i po-
biera przy tym prąd
o wartości pojedyn-
czych mikroamperów.
Istotną zaletą tej kostki
jest również to, że po-
siada wolną, 240-bajto-
wą pamięć, którą można
traktować jak nieulotną
pamięć RAM. Nieulot-
ną, ponieważ jej zawar-
tość, mimo odłączenia
urządzenia z sieci, jest
podtrzymywana przez
wspomnianą baterię.
Dostępna pamięć jest
wykorzystana do prze-
chowania danych wpro-
wadzonych w fazie pro-
gramowania urządzenia.
Zegar RTC komuni-
kuje się z procesorem
przez magistralę I
2
C.
Na wyjściu INT kostki
PCF8583 co sekundę
występuje zbocze opa-
dające, które wywołuje
przerwanie INT0 w mi-
kroprocesorze. Sygnał
13
Projekty AVT
Elektronika dla Wszystkich
SS
SS
tt
tt
ee
ee
rr
rr
oo
oo
w
w
w
w
nn
nn
ii
ii
kk
kk
dd
dd
zz
zz
w
w
w
w
oo
oo
nn
nn
kk
kk
aa
aa
ss
ss
zz
zz
kk
kk
oo
oo
ll
ll
nn
nn
ee
ee
gg
gg
oo
oo
2
2
6
6
7
7
0
0
++
++
++
Rys. 1 Schemat ideowy
pochodzący z tej końcówki jest w pewnym
sensie sygnałem zegarowym taktującym cały
układ.
Mikroprocesor obsługuje wyświetlacz
LCD 16*2 znaków oraz kontroluje stan przyci-
sków S1..S4. Pracą dzwonka steruje przeka-
źnik REL1, z kolei którego pracą poprzez tran-
zystor T1 steruje port P3.7 mikrokontrolera.
Dioda D2 zapobiega wpływowi prądu za-
silacza do baterii, a dioda D1 wypływowi
prądu baterii poza układ RTC.
Zasilacz urządzenia jest typowym ukła-
dem z prostownikiem dwupołówkowym oraz
stabilizatorem LM7805 i nie wymaga szer-
szego opisu. W modelu zastosowałem trans-
formator TS2/15 (10V1/0.18A), jednak lepiej
jest użyć typu TS2/14, ponieważ posiada nie-
co większą wydajność prądową (8V2/0.22A).
Program
Program można ściągnąć ze strony EdW
z działu FTP. Zajmuje on 2048 bajtów, a więc
całą przestrzeń pamięci EEPROM mikropro-
cesora. Większość pamięci zajmują procedu-
ry obsługi menu (LCD, zegar) oraz procedu-
ry komunikacji z układem PCF8583.
Zastosowany algorytm wyznaczania
dzwonka musi gwarantować, że mimo chwi-
lowego (a nawet długiego) braku zasilania
układ nie straci „orientacji” w czasie i po po-
wrocie napięcia sieci włączy dzwonek o za-
programowanym czasie. Najprostszym algo-
rytmem realizującym takie zadanie jest od-
czyt czasów zadziałania dzwonka, zapisa-
nych w kolejnych komórkach pamięci nieu-
lotnej, i porównanie każdego z nich z bieżą-
cym czasem co pewien okres – np. co minu-
tę. Jeżeli wynik porównania jest prawdziwy,
następuje włączenie dzwonka. Podobny spo-
sób zastosowałem w urządzeniu, z tą różnicą,
że procesor nie odczytuje bezpośrednio cza-
su zadziałania dzwonka. W zastosowanym
algorytmie do wyznaczenia czasu dzwonka
wystarczą następujące dane:
- czas pierwszego dzwonka,
- czas lekcji,
- liczba lekcji,
- czasy poszczególnych przerw.
Posiadając te elementarne dane oraz
bieżący czas, procesor oblicza „w locie”
czasy włączenia dzwonka. Taki sposób
szukania czasu zadziałania dzwonka jest
wygodniejszy z punktu widzenia osoby
programującej automat. W razie koniecz-
ności przesunięcia godziny wystarczy
zmienić ustawienia zegara oraz czas
pierwszego dzwonka, a w razie zmiany
harmonogramu zajęć wystarczy przesunąć
czas pierwszego dzwonka. Czynność ta
jest więc o wiele krótsza niż ustawianie
z osobna poszczególnych czasów włącze-
nia dzwonka.
Dane są przechowywane w pamięci
układu PCF8583 w komórkach o adresie
powyżej 0Eh. Dokładniejszych informacji
na ten temat dostarcza tabela 1. Dla zao-
szczędzenia pamięci programu w procesorze
odczytem (zapisem) bieżącego czasu oraz
danych umieszczonych w pamięci U2 zajmu-
ją się te same procedury programu. Ponieważ
czas zapisywany w rejestrach układu U2 jest
podawany w formacie BCD, procedury te za-
mieniają podczas odczytu (zapisu) liczbę
z formatu BCD (DEC) na format DEC
(BCD). Z tego powodu format danych, który
normalnie byłyby dziesiętny, zostaje teraz
przekształcony do formatu BCD podczas za-
pisu i zmieniony do pierwotnej postaci decy-
malnej podczas odczytu.
Procedury sprawdzające czas obsługują
przerwanie INT0, które wywołuje zegar
RTC. Przerwanie to jest pomocne podczas
wyświetlania zegarka na LCD, zwłaszcza że
występuje ono co sekundę.
Procesor pobiera najpierw czas pierwsze-
go dzwonka i porównuje z czasem zegara. Je-
śli czasy są te same, program przechodzi do
procedury dzwonka, jeśli nie, to do czasu
pierwszego dodawany jest czas lekcji i znowu
następuje porównanie z czasem RTC. Jeśli to
nie ten czas, w następnej kolejności dodawa-
ny jest czas pierwszej przerwy. Jeśli do tego
momentu wynik porównania jest fałszywy,
dodawany jest czas lekcji, następuje porów-
nanie, dodawany jest czas drugiej przerwy,
porównanie... Szukanie odpowiedniego czasu
kończy się na odczytaniu zawartości komór-
ki, w której jest umieszczony czas ostatniej
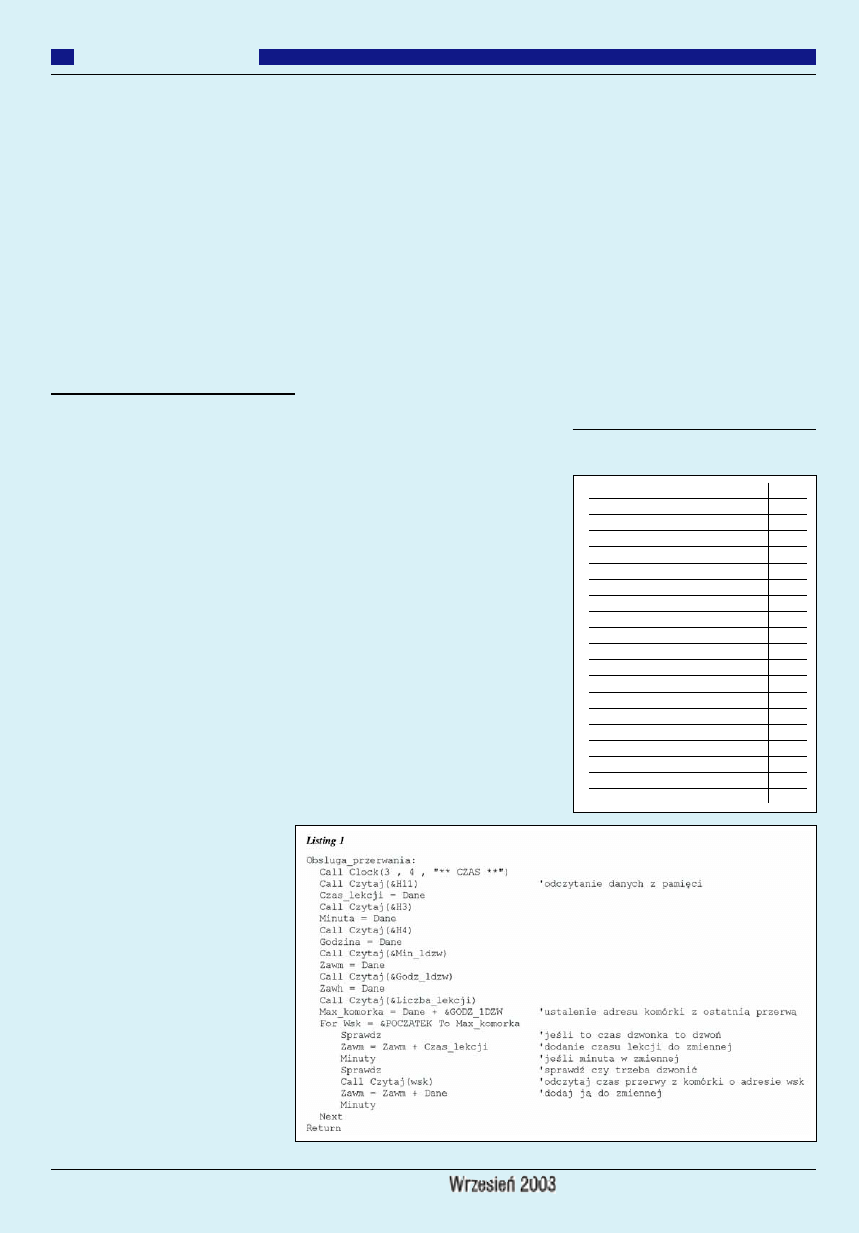
przerwy. Fragment programu odpowiedzial-
nego za tę procedurę prezentuje listing 1.
W trakcie pracy na wyświetlaczu pokazywa-
ny jest bieżący czas. Wyświetlaniem czasu
zajmuje się procedura „obsluga_przerwania”,
uruchamiana podczas obsługi przerwania
INT0. Podczas programowania sterownika
obsługa przerwania zostaje wyłączona.
Czas dzwonienia dzwonka można ustalać.
Podczas dzwonienia na wyświetlaczu ukazu-
je się symbol dzwonka, który informuje o za-
działaniu przekaźnika. Ustawianie czasu lek-
cji i przerw odbywa się z interwałem 5min.,
ponieważ ich czas liczony w minutach (który
wynosi 45min., ale zdarzają się skrócone lek-
cje) jest wielokrotnością liczby 5.
Struktura menu nie jest zbyt złożona. Po-
siada ono następujące pozycje, które są wy-
bierane za pomocą przycisku „MODE”:
CZAS. Na wyświetlaczu pokazywany jest
bieżący czas z dokładnością do 1 sekundy.
Przejście do tej pozycji jest równoznaczne
z włączeniem automatu, gdyż tylko wtedy
jest zezwolenie na przerwanie.
ZEGAR. Nastawianie zegara RTC. Nasta-
wiamy godziny oraz minuty za pomocą przy-
cisków „+” i „ - ”. Po dowolnej modyfikacji
zerowane są sekundy. Wyboru pomiędzy mi-
nutą a godziną dokonujemy za pomocą przy-
cisku „NEXT”.
14
Projekty AVT
Elektronika dla Wszystkich
Listing 1
Obsluga_przerwania:
Call Clock(3 , 4 , "** CZAS **")
Call Czytaj(&H11)
'odczytanie danych z pamięci
Czas_lekcji = Dane
Call Czytaj(&H3)
Minuta = Dane
Call Czytaj(&H4)
Godzina = Dane
Call Czytaj(&Min_1dzw)
Zawm = Dane
Call Czytaj(&Godz_1dzw)
Zawh = Dane
Call Czytaj(&Liczba_lekcji)
Max_komorka = Dane + &GODZ_1DZW
'ustalenie adresu komórki z ostatnią przerwą
For Wsk = &POCZATEK To Max_komorka
Sprawdz
'jeśli to czas dzwonka to dzwoń
Zawm = Zawm + Czas_lekcji
'dodanie czasu lekcji do zmiennej
Minuty
'jeśli minuta w zmiennej
Sprawdz
'sprawdź czy trzeba dzwonić
Call Czytaj(wsk)
'odczytaj czas przerwy z komórki o adresie wsk
Zawm = Zawm + Dane
'dodaj ją do zmiennej
Minuty
Next
Return
Tab. 1 Rozmieszczenie danych
w pamięci RAM układu PCF8583.
rejestr kontrolny
00h
setne części sekundy
01h
sekundy
02h
minuty
03h
godziny
04h
rok
05h
tydzień/miesiąc
06h
timer
07h
kontrolny rejestr alarmu
08h
rejestry alarmu
.......
rejestr llicznika
0Fh
liczba llekcji
10h
czas llekcji
11h
czas ddzwonka
12h
minuta ppierwszego ddzwonka
13h
godzina ppierwszego ddzwonka
14h
czas 11 pprzerwy
15h
czas 22 pprzerwy
16h
...................................................
.......
czas 2235 pprzerwy
FFh
PIERWSZY DZWONEK.
Czas wystąpienia pierwszego
dzwonka. Nastawianie przebiega
tak samo jak w przypadku zegara.
CZAS LEKCJI. Standardowo
45, ale bywa, że lekcje są skróco-
ne. Klawiszami „+” i „-” ustala-
my wartość, która dla wygody
jest wielokrotnością liczby 5.
Jednostką jest minuta.
CZAS DZWONKÓW. Jest to
czas, przez jaki będzie dzwonił
dzwonek. Jego miarą jest sekunda.
LICZBA LEKCJI. Jest naj-
większą liczbą lekcji, jaka wystę-
puje w jednym dniu.
n
PRZERWA. Oznacza czas
n
-tej przerwy, począwszy od prze-
rwy między pierwszą a drugą lek-
cją. Czas liczony w minutach usta-
wiamy za pomocą przycisków „+”
i „-”. Aby przejść do następnej
przerwy, wciskamy przycisk „NE-
XT”. Gdy liczba lekcji jest mniej-
sza od 2, pozycja ta jest pomijana.
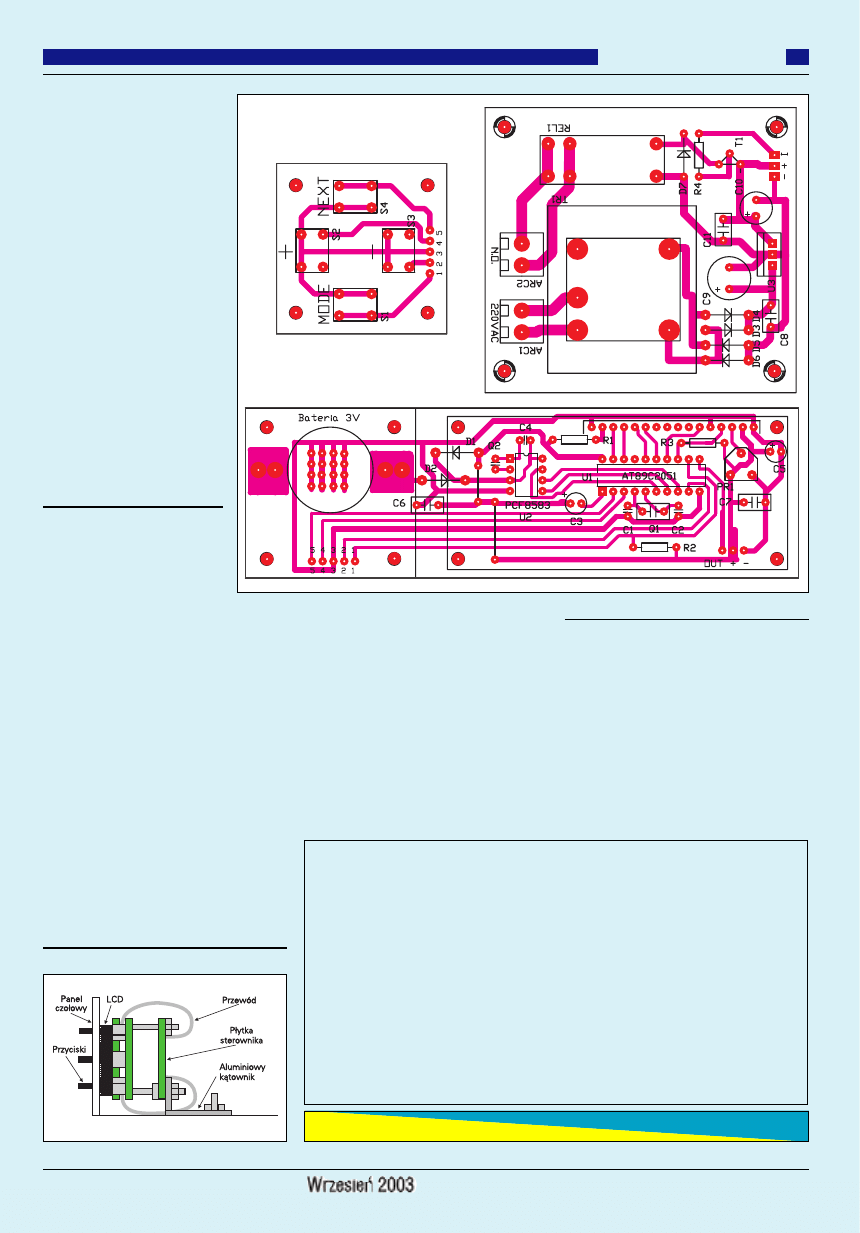
Montaż
i uruchomienie
Montaż elektroniki możemy
przeprowadzić na płytkach dru-
kowanych pokazanych na rysun-
kach 2-4. Jak widać, zasilacz
z przekaźnikiem został zmontowany na osob-
nej płytce. Wyświetlacz oraz płytkę z przyci-
skami łączymy z płytką sterownika za pomo-
cą tasiemki przewodów. Pod baterię wykonu-
jemy podstawkę ze srebrzanki, jednak lep-
szym wyjściem jest użycie fabrycznie wyko-
nanej podstawki (jakie spotyka się na płytach
głównych komputerów). Ze względów bez-
pieczeństwa podczas uruchamiania urządze-
nia zasilamy je z innego zasilacza i montaż
transformatora odkładamy na później. Uru-
chomienie układu powinno przebiegać bez
problemów. Potencjometrem PR1 ustawiamy
kontrast wyświetlacza. Jasność podświetla-
nia możemy ustalać za pomocą zmiany war-
tości R1. Jako obudowę najlepiej jest zasto-
sować obudowę ZIVA. W jej przednim pane-
lu wycinamy otwór na wyświetlacz LCD
oraz wiercimy otworki na przyciski S1..S4.
Z tyłu wykonujemy otwór na wyłącznik zasi-
lania oraz otwór, przez który będzie przebie-
gał przewód zasilający. Również z tyłu obu-
dowy przykręcamy kostkę elektrotechniczną,
z której uzyskamy dostęp do styków przeka-
źnika, oraz umieszczamy tam wyłącznik sie-
ciowy. Montaż płytki sterownika, wyświetla-
cza oraz płytki z przyciskami jest pionowy.
Szczegóły montażu widoczne są na rysunku
5. Urządzenie można również umieścić na
ścianie w pozycji pionowej, co w wielu sytu-
acjach może być lepszym rozwiązaniem.
Wtedy otwór na wyświetlacz wykonujemy
w górnej pokrywie obudowy. Styki przeka-
źnika REL1 podłączamy równolegle do ist-
niejącego włącznika dzwonka. Takie włącze-
nie urządzenia w instalację dzwonkową
umożliwi, w razie konieczności, przejście na
„sterowanie ręczne”.
Piotr Wójtowicz
15
Projekty AVT
Elektronika dla Wszystkich
Wykaz elementów
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100Ω
R2,R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,7kΩ
PR1 . . . . . . . . . . . . . . . . . . . .10kΩ PR miniaturowy
Kondensatory
C1,C2,C4 . . . . . . . . . . . . . . . . . . . . . . . . . . . .33pF
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2µF/16V
C5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C6,C7,C8,C11 . . . . . . . . . . . . . . .100nF ceramiczny
C9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470µF/16V
C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . .220µF/16V
Półprzewodniki
D1,D2,D7 . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
D3-D5 . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4001
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC557
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . .AT89C2051
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .PCF8583
U3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM7805
Różne
DP1 . . . . . . . . . . . .wyświetlacz alfanumeryczny 16*2
Q1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12MHz
Q2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32768Hz
S1-S4 . . . . . . . . . . . . . . . . . . . . . . .µSwitch 10mm
TR1 . . . . . . . . . . . . . . . . . . . . .transformator TS2/14
REL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . .RM83Z 5V
BAT1 . . . . . . . . . . . . . . . . . . . . . . .bateria litowa 3V
podstawka precyzyjna 20dip
podstawka precyzyjna 8dip
wyłącznik sieciowy
kostka elektrotechniczna
Komplet podzespołów z płytką jest dostępny w sieci handlowej AVT jako kit szkolny AVT-2670
Rys. 2-4 Schematy montażowe
Rys. 5
a)
b)
c)
Przyciski i programowanie
Działanie klawiatury jest następujące:
- Przyciski „1” – „8” są przyciskami szyb-
kiego wyboru zaprogramowanych napięć lub
prądów. To znaczy, że pod każdym z tych
przycisków jest przypisana przy programo-
waniu jakaś wartość prądu i napięcia. Naci-
śnięcie jednego z tych klawiszy wybiera od
razu przypisaną do danego klawisza wartość
napięcia lub prądu.
- Przycisk „R” różni się od przycisków
szybkiego wyboru tym, że jego nastawy są
zapamiętywane w pamięci EEPROM. Zasi-
lacz po włączeniu zawsze odczytuje napięcie
i prąd przypisany temu przyciskowi.
- Przycisk „UP-H” oraz „DW-H” zmieniają
(zwiększają lub zmniejszają) zgrubnie napię-
cie lub prąd. Zgrubna zmiana polega na tym,
że napięcie zmieniane jest z krokiem 1V, na-
tomiast prąd z krokiem 100mA.
- Przyciski „UP-L” oraz „DW-L” zmienia-
ją (zwiększają lub zmniejszają) dokładnie na-
pięcie lub prąd. Dokładna zmiana polega na
tym, że napięcie jest zmieniane z krokiem
100mV, natomiast prąd z krokiem 10mA.
- Przycisk „ON/OFF” służy do załączania
lub wyłączania napięcia doprowadzonego do
obciążenia. Przycisk ten wykorzystywany
jest także do zapamiętywania ustawień w try-
bie programowania przycisków szybkiego
wyboru.
- Przycisk „U/I” umożliwia wybór rodzaju
nastawy: Czy nastawa ma dotyczyć napięcia,
czy prądu. Stan przycisku „U/I” sygnalizowa-
ny jest znakiem „>” na wyświetlaczu LCD.
- „MODE”. Naciśnięcie go powoduje
przejście zasilacza w tryb pokazywania po-
boru prądu przez obciążenie.
Aby zaprogramować parametry (napięcia
i prądy) klawiszy szybkiego wyboru, należy
wyłączyć zasilacz i przycisnąć przycisk
„MODE”. Przy przyciśniętym przycisku na-
leży ponownie włączyć zasilanie i jesteśmy
już w trybie programowania klawiszy szyb-
kiego wyboru. Wartości napięć i prądów
można ustawić tak jak w przypadku normal-
nej obsługi. Każdą zmianę prądu lub napię-
cia, jaką chcemy, aby była zapamiętana
w EEPROM, należy zapamiętać, naciskając
przycisk „ON/OFF”. Ustawienia pozostałych
przycisków szybkiego wyboru można doko-
nać, naciskając odpowiedni przycisk „1 – 8”,
a następnie po ustawieniach napięcia i prądu
każde z nich należy zapamiętać, naciskając
przycisk „ON/OFF”.
Aby wyjść z trybu programowania, nale-
ży wyłączyć zasilanie. Po załączeniu zasila-
nia zasilacz jest gotowy do pracy z nowymi
ustawieniami przycisków szybkiego wyboru.
Oprogramowanie zasilacza zostało tak
napisane, by po każdym wyborze napięcia
przyciskiem szybkiego wyboru zasilacz
odłączał napięcie od obciążenia. Takie dzia-
łanie uchroni zasilany układ w przypadku
błędnego wyboru zaprogramowanego na-
pięcia. Po prawidłowym wyborze napięcia
należy ponownie załączyć napięcie do ob-
ciążenia przyciskiem „ON/OFF”. Obciąże-
nie jest odłączane tylko dla nastaw napięć
przypisanym przyciskom od „1” do „8”.
Przy wyborze prądu wspomnianymi przyci-
skami zasilacz nie odłącza dołączonego ob-
ciążenia.
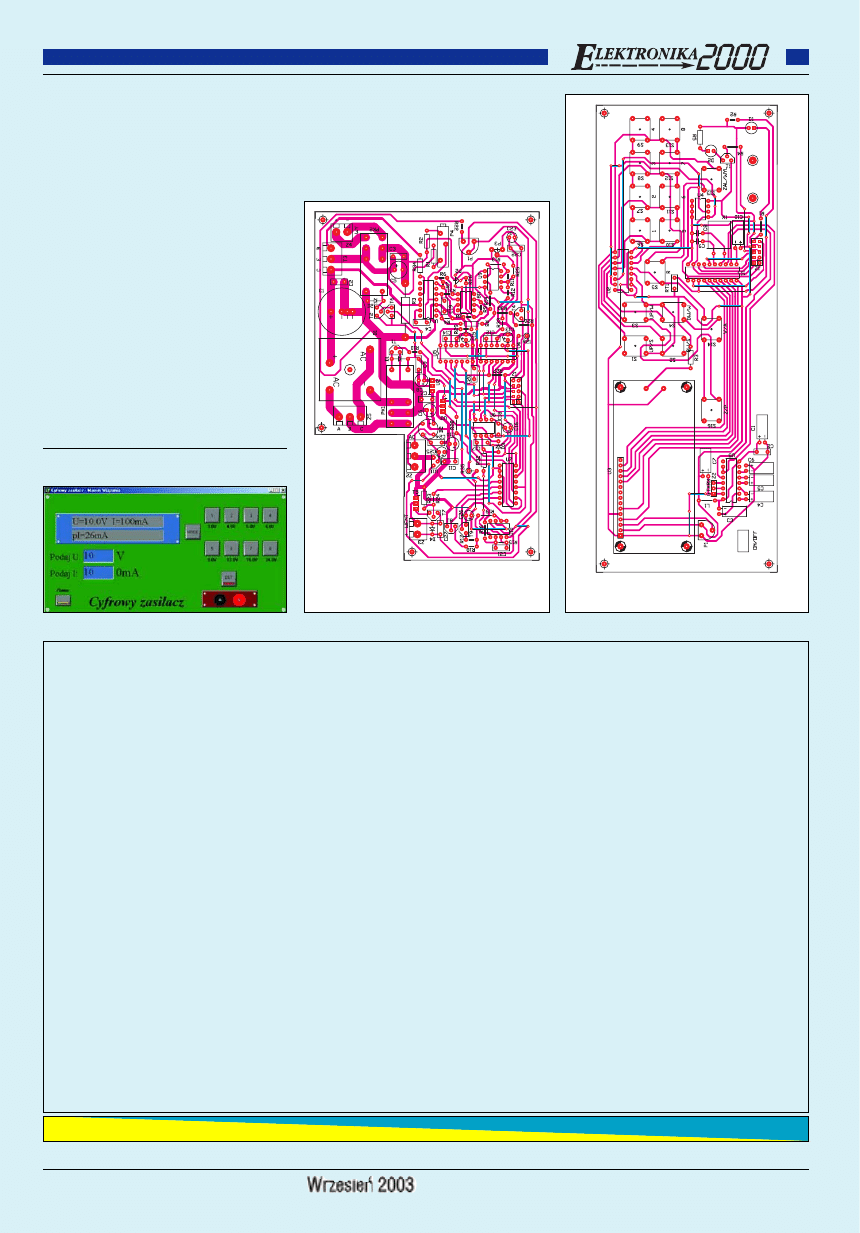
Obsługa za pomocą
terminala
Sterowanie funkcjami zasilacza jest możliwe
nie tylko za pośrednictwem przycisków na
płycie zasilacza. Zasilaczem można sterować
z dowolnego terminala za pośrednictwem
kilku prostych komend, do których należą:
- Wysłanie znaku „p” powoduje zwrócenie
stanu ustawień zasilacza w
postaci:
„100:31:51:0”. Pierwsza liczba wskazuje na
wartość napięcia, która wynosi 10.0V (100
bez kropki), druga po dwukropku wskazuje
na wartość ustawionego prądu, który wynosi
310mA (31*10). Dla wartości 1 będzie to
10mA. Kolejna wartość wskazuje na pobór
prądu przez obciążenie, które wynosi 51mA
(przesyłana w mA). Ostatnia wartość wskazu-
je na stan przekaźnika wyjściowego. Jeżeli
„0”, to przekaźnik dołącza napięcie do obcią-
żenia, natomiast wartość „1” wskazuje na odłą-
czenie napięcia od obciążenia.
- Wysłanie znaku „o” jest równorzędne
z działaniem przycisku „ON/OFF”
- Wysłanie znaku „u” ustawia zasilacz w tryb
oczekiwania na podanie przez terminal napię-
cia. Zasilacz po wysłaniu tegoż znaku wyśle
znak „>”, który jest znakiem zachęty do
wprowadzenia wartości napięcia, które chce-
my uzyskać na wyjściu zasilacza. Wprowa-
dzoną wartość należy potwierdzić klawiszem
„enter”. Wprowadzane zakresy napięć po-
winny być z zakresu od 30 do 240 bez krop-
ki dziesiętnej. Np. wysłana wartość 35 będzie
odpowiadać napięciu 3.5V.
- Wysłanie znaku „i” jest podobne do zna-
ku „u”, z tym że dotyczy prądu. Podawane
16
Elektronika dla Wszystkich
Rys. 4
Rys. 5
CC
CC
yy
yy
ff
ff
rr
rr
oo
oo
w
w
w
w
yy
yy
zz
zz
aa
aa
ss
ss
ii
ii
ll
ll
aa
aa
cc
cc
zz
zz
2
2
6
6
7
7
4
4
c
c
z
z
ęę
ęę
śś
śś
ćć
ćć
22
22
wartości prądu powinny być z zakresu od 1
do 400, przy czym 1 to 10mA, a 400 to
4.00A, tak więc każda wpisana wartość jest
wielokrotnością 10mA.
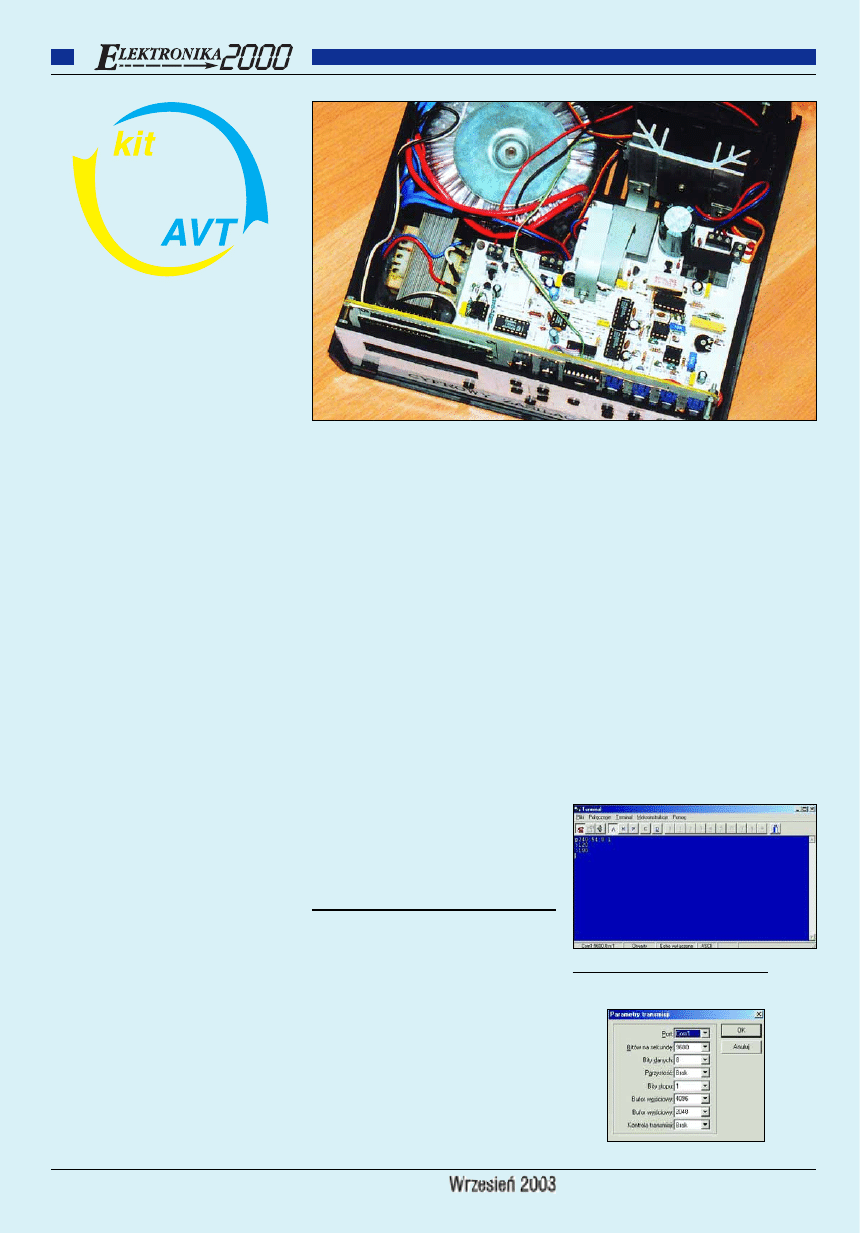
Rysunek 4 przedstawia przykład wysła-
nych oraz odebranych danych, natomiast
rysunek 5 przedstawia sposób skonfiguro-
wania łącza RS232.
Do sterowania zasilaczem poprzez RS232
został napisany prosty program. Rysunek 6
przedstawia wygląd oferowanego programu
i jak widać jego interfejs jest bardzo podob-
ny do rozkładu przycisków na płycie zasila-
cza, dzięki czemu obsługa programu będzie
podobna do obsługi zasilacza przyciskami.
Aby wpisane wartości prądów i napięć były
przesłane do zasilacza, należy potwierdzać je
naciśnięciem klawisza „enter”. W programie
jest możliwość wpisywania wartości napięć
i prądów w postaci nie tylko bez, ale i z krop-
ką np. 5.5V lub 4A. Kliknięcie na tekście
„0mA” zmienia go na „A”, przez co możliwe
jest podawanie łatwiej i szybciej większych
wartości prądów niż w postaci np. 400
(bo 400*10mA=4A).
Ciąg dalszy na stronie 19.
17
Elektronika dla Wszystkich
Rys. 6
Wykaz elementów
Zasilacz
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2kΩ 1%
R2,R7,R8,R12,R16,R18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ 1%
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .0,1Ω 5W
R4,R5,R10,R24,R28,R30,R32 . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R6,R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9kΩ 1%
R13,R14,R29,R31,R33 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ
R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4kΩ 1%
R15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19kΩ 1%
R17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11kΩ 1%
R19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99kΩ 1%
R20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2kΩ
R21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6,8kΩ
R22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1,2kΩ
R23 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22kΩ
R25,R26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220kΩ
R27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47kΩ
R34 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47Ω
R35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470Ω
P1,P2,P3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ (montażowy)
P4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ helitrim
Kondensatory
C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4700µF/50V
C2,C3,C7,C9,C11,C12,C14,C17,C18,C19,C22,C24 . . . . . . . . . .100nF
C4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220pF
C5,C23,C26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47µF/16V
C6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470µF/25V
C8,C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220µF/16V
C13,C15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33µF/16V
C16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7µF/16V
C20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10nF
C21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220nF
C25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/25V
C27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47nF
Półprzewodniki
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM723 DIP-14
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7812
U3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7805
U4,U5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .MAX504
U6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .MAX1243
U7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .PCF8574AP
U8,U9,U10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM358
U11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .79L12
D1 – D4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
B1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Mostek B50C25000
B2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Mostek 1A
T1,T4,T6,T7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548
T2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC558
T3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BD249C
T5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BD139
T8,T9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BS107
Inne
S1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Wyłącznik ON/OFF
PK1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .RM82/12V
PK2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .RM94/12V
TR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .TST2*12V
TR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .TS15/34
M1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Wentylator 12V
F1 . . . . . . . . . . . . . . . . . . . .Gniazdo bezpiecznikowe oraz bezpiecznik 1A
Z1 . . . . . . . . . . . . . . . . . . . . . . . .Gniazdo zaciskane 10-pin oraz goldpiny
Obudowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Z17
Radiator
Wyświetlacz
Rezystory
R1,R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470Ω
R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5,6kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100Ω
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
P1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ (montażowy)
RT1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Termistor 22kΩ
Kondensatory
C1,C3,C4,C5-C7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/25V
C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF
C8,C9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33pF
C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7µF/25V
Półprzewodniki
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89C4051
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .PCF8574AP
U3 . . . . . . . . . . . . . . . . . . . . .Wyświetlacz LCD 1*16 z podświetleniem
U4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .AT24C04
U5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .MAX232
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED 3mm czerwona
D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED 3mm zielona
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC558
X1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Kwarc 11MHz
Inne
L1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Dławik 330µH
S1-S16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Mikrostyki
Z1 . . . . . . . . . . . . . . . . . . . . . .Gniazdo zaciskane 10-pin oraz goldpiny
Z2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Gniazdo DB9/M
GN . . . . . . . . . . . .2 x gniazda bananowe koloru czerwonego oraz czarnego
GB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Gniazdo bezpiecznikowe
Komplet ppodzespołów zz ppłytką jjest ddostępny ww sieci hhandlowej AAVT jjako kkit sszkolny AAVT-22674
Rys. 7 Schemat montażowy (skala1:2)
Rys. 8 Schemat montażowy (skala 1:2)
18
Elektronika dla Wszystkich
Do czego to służy?
Na początku stycznia zadzwonił do mnie pe-
wien Czytelnik, który napotkał kłopoty przy
próbie dołączenia wyświetlacza LCD do pro-
cesora AVR (‘8535). Przez telefon nie sposób
było ustalić przyczyny. Mógł nią być błąd
w programie albo też błędne podłączenie lub
uszkodzenie wyświetlacza. Poradziłem, żeby
przede wszystkim sprawdził, czy procesor
wysyła informację na linie portu procesora,
do których jest dołączony wyświetlacz.
Można to zrobić w różny sposób. Po
chwili namysłu doszedłem do wniosku, że
podobne problemy z pewnością napotka wie-
lu Czytelników, piszących własne programy.
Aby ułatwić im życie, postanowiłem zapro-
jektować monitor stanu portów procesora.
Chodzi o to, żeby podczas pracy programu
można było łatwo sprawdzić, co dzieje się na
poszczególnych liniach portów.
W przypadku wielu procesorów, w tym
rodziny ‘51, nie ma żadnego problemu, bo na
porcie może wystąpić jeden z dwóch stanów.
Monitorem stanu danej końcówki może być
dioda LED i rezystor szeregowy włączone
między daną końcówkę a dodatnią szynę za-
silania. Z portami procesorów AVR sprawa
jest trudniejsza, bo mogą tam występować
nie dwa, tylko cztery różne stany - szczegóły
można znaleźć w odcinku Mikroprocesoro-
wej Oślej łączki w numerze 1/2003. Opisany
dalej monitor pozwala określić nie tylko spo-
czynkowy stan danej końcówki, ale też zmia-
ny stanów podczas pracy programu.
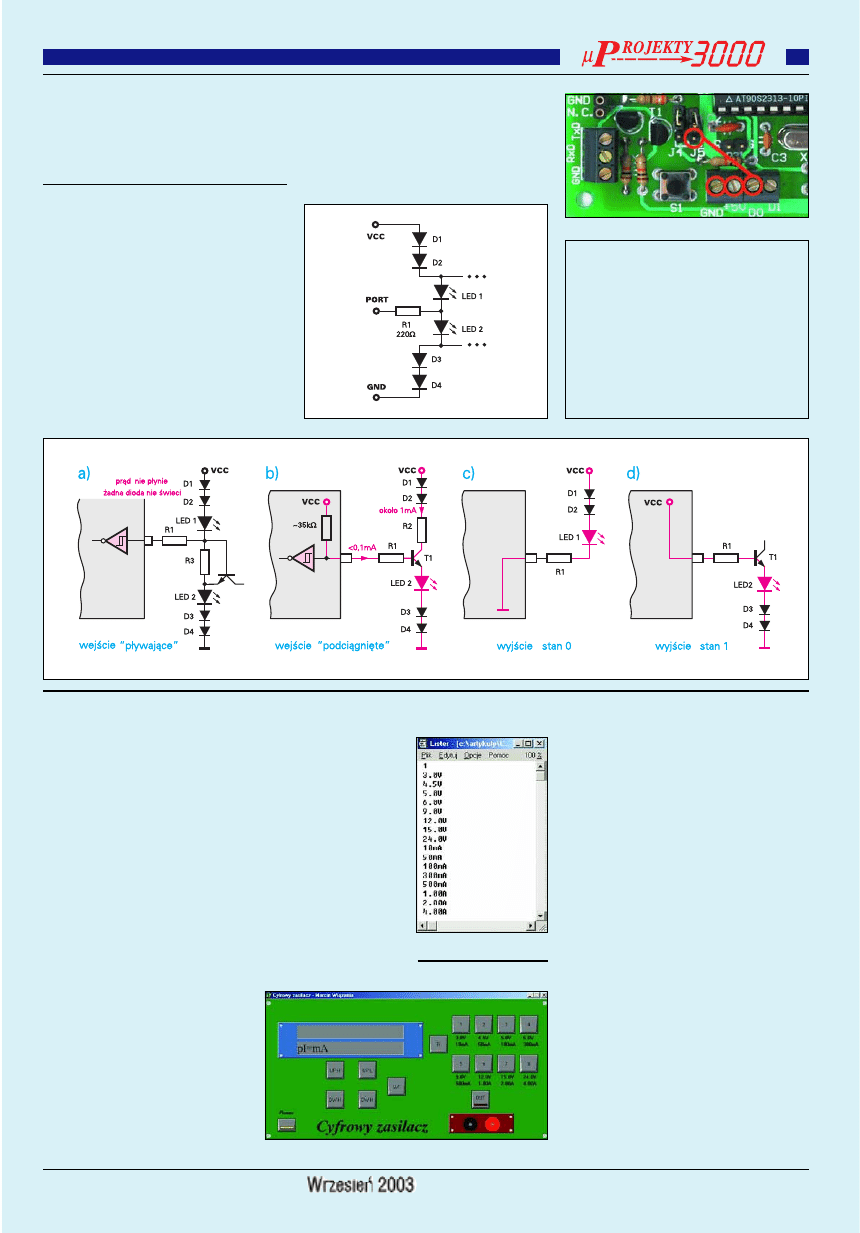
Jak to działa?
Rysunek 1 pokazuje schemat ideowy układu
monitora, ściślej - monitor stanu jednej linii.
Punkt PORT należy dołączyć do badanej linii
portu procesora AVR, a punkty VCC i GND
podłączyć do napięcia zasilającego procesor.
Aby rozróżnić cztery stany (dwa przy pracy
w roli wyjścia, dwa - jako wejścia) potrzebne
są co najmniej dwie diody LED. Gdy koń-
cówka pracuje jako wejście „pływające”, nie
świeci żadna z diod. Sytuacja jest taka, jakby
punkt PORT pozostał niepodłączony. Aby
lampki nie świeciły, suma napięć przewodze-
nia diod i złącza baza-emiter tranzystora mu-
si być większa od napięcia zasilania. Ponie-
waż niektóre żółte diody LED zaczynają za-
uważalnie świecić już przy napięciu 1,7V,
koniecznie jest zastosowanie szeregowych
diod D1...D4. Wtedy na pewno przy napięciu
zasilania do 5,5V żółte diody LED1 i LED2
nie będą świecić.
Gdy sprawdzana końcówka pracuje jako
wyjście, procesor ustawia tam „czysty” stan
wysoki albo niski, co odpowiada dołączeniu
punktu PORT do plusa zasilania albo do ma-
sy. Znaczny prąd płynie przez rezystor R1 i
jasno świeci jedna z diod LED1, LED2. Przy
stanie wysokim wyjścia – LED2, przy niskim
– LED1. Tranzystor T1 praktycznie nie od-
grywa wtedy żadnej roli.
Gdy badana końcówka jest wejściem
„podciągniętym”, panuje na niej w spoczyn-
ku stan wysoki, ale wydajność prądowa jest
mała (znacznie poniżej 1mA). Właśnie dzię-
ki zdecydowanie różnej wydajności prądo-
wej „podciągnięte” wejście można skutecz-
nie odróżnić od wyjścia w stanie wysokim.
Pomaga w tym tranzystor T1 i dodatkowy re-
zystor R2. Mianowicie z badanej końcówki
przez rezystor R1 płynie wtedy bardzo mały
prąd, ale otwiera on tranzystor T1 i przez dio-
dę LED2 płynie prąd o wartości wyznaczonej
przez R2. Wartość R2 jest tak dobrana, żeby
prąd ten wynosił 1mA lub mniej. Tym sa-
mym, gdy badana końcówka jest wejściem
„podciągniętym”, świeci LED2, ale ze znacz-
nie zmniejszoną jasnością, wyznaczoną przez
wartość rezystora R2. W ten sposób jasność
świecenia LED2 pokazuje, czy chodzi
o „prawdziwy” wysoki stan wyjścia (jasne
światło), czy o „podciągnięcie” wejścia (świe-
cenie słabe, ale wyraźnie zauważalne). Rezy-
stor R3 jest potrzebny, żeby układ nie reagował
na prądy upływu, mniejsze niż 5µA.
Na rysunku 2 pokazane są reakcje moni-
tora na wszystkie cztery możliwe stany linii
portu i rozpływ prądów.
Oczywiście, gdy porty będą pracować
w roli wyjść i gdy będą się na nich szybko
zmieniać stany, będą świecić obie lampki.
Świecenie obu lampek świadczy więc, że na
badanej końcówce występuje przebieg impul-
sowy, a stosunek jasności lampek wskaże
współczynnik wypełnienia tego przebiegu.
Uwaga! W proponowanej wersji układ
przeznaczony jest do pracy przy napięciu
zasilania w granicach 5V±0,5V. Jeśli proce-
sor miałby pracować przy innym napięciu za-
silania albo z diodami LED o innym napięciu
przewodzenia, należy zmienić liczbę szere-
gowych diod krzemowych (D1...D4), by
przy odłączonym punkcie PORT nie świeciła
żadna z diod LED. Zwłaszcza w przypadku
użycia diod czerwonych, mających niższe
napięcie przewodzenia, może zajść potrzeba
dodania diod krzemowych
Warto dodać, że najprostszy monitor sta-
nu portów procesora AVR można zbudować
według rysunku 3. Działanie będzie iden-
tyczne, jak układu z rysunku 1, tylko przy
wejściu „podciągniętym” jasność świecenia
LED2 będzie bardzo mała.
+
+
M
M
o
o
n
n
i
i
t
t
o
o
r
r
p
p
o
o
r
r
t
t
ó
ó
w
w
A
A
V
V
R
R
Rys. 1 Schemat ideowy
19
Elektronika dla Wszystkich
Kto chciałby wypróbować taki prosty
układ, powinien zastosować diodę LED2
z przezroczystą soczewką, żeby można było
dostrzec to znikome świecenie przy prądzie
diody rzędu 0,1mA.
Montaż i uruchomienie
Do tak prostego układu nie przewidziano płyt-
ki drukowanej. Wszyscy uczestnicy kursu mi-
kroprocesorowej Oślej łączki powinni wyko-
nać przynajmniej jednokanałowy tester we-
dług rysunku 1, choćby w postaci „pająka”, jak
na fotografii wstępnej. Aby dołączyć monitor
do badanej końcówki portu, warto wykorzy-
stać jedną końcówkę z listwy z gniazdkami.
Kto chce, może zmontować kilka, nawet
osiem, kanałów, by uzyskać prosty analizator
stanów.
Aby wstępnie sprawdzić działanie testera,
można wykorzystać programik MonPort.bas
z naszej strony internetowej. Należy dołą-
czyć wejście monitora (PORT) do punktu D0
(zacisk ARK lub dolna szpilka zwory J5), jak
pokazuje rysunek 4.
Piotr Górecki
Wykaz elementów
monitora jednokanałowego
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .220Ω
R2 . . . . . . . . . . . . . . . . . . . . .3,3kΩ (2,2...6,8kΩ)
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
LED1,LED2 . . . . . . . . . . . . . . . . . . . . . .żółta 3mm
T1 . . . . . . . . . . . . . . . . . . . . .BC548 lub podobny
D1...D4 . . . . . . . . . . . . . . . . . . . . . . . .1N4001...7
(wspólne dla wszystkich kanałów)
Rys. 3
R
R
y
y
s
s
.
.
4
4
Rys. 2
Ciąg dalszy ze strony 17.
Przyciski szybkiego wyboru w programie są
tworzone wirtualnie, to znaczy, że mogą one
mieć wartości inne niż wartości przycisków
szybkiego wybierania znajdujące się w zasi-
laczu. Dzięki temu istnieje możliwość zwięk-
szenia liczby przycisków wyboru aż do 16.
Przyciskiem „MODE” można zmienić war-
tości wskazywane przez przyciski wyboru na
prąd lub napięcie. Aby program poprawnie
pracował, należy go skonfigurować. Konfi-
guracja będzie polegać na zmianie pliku te-
kstowego, w którym zawarty jest numer po-
rtu oraz napięcia i prądy przypisane wirtual-
nym przyciskom wyboru. Wygląd te-
go pliku konfiguracyjnego przedsta-
wia rysunek 9. Pierwsza wartość
wskazuje na numer portu i jeżeli bę-
dzie to COM1, to „1”, a jeżeli COM2,
to należy wpisać „2”. Pozostałe warto-
ści przypisywane są klawiszom od 1
do 8 w kolejności, w jakiej znajdują
się w tym pliku. Po wartościach na-
pięć podawane są wartości prądów.
Dla uniknięcia błędów, nowe wartości
ustawień należy
podawać w takiej
formie w jakiej
znajdują się w do-
łączonym pliku
„ustaw.txt”. Pro-
gramowy przy-
cisk „OUT” załą-
cza napięcie do
obciążenia, nato-
miast przycisk
„Power” jest wir-
tualnym wskaźni-
kiem zasilania,
który należy za-
wsze włączyć, by program zaczął działać. Na
rysunku 10 przedstawiam program dostoso-
wany do drugiej wersji programu zapisanego
w 89C4051, który jest odzwierciedleniem
płyty czołowej zasilacza.
Należy zauważyć, że w dołączonym pro-
gramie obsługi zasilacza pobierany prąd jest
wskazywany w drugiej linii, nie ma tam prze-
łącznika trybu wyświetlania. Napisany przeze
mnie program można udoskonalić. Jak było
wspomniane, program zawarty w 89C4051
napisany został w rewelacyjnym BASCOM-
ie, przy czym 4kb zawarte w mikrokontrole-
rze zostały wykorzystane całkowicie. Działa-
nie programu nie jest skomplikowane, gdyż
polega w znacznej części na obsłudze kla-
wiatury, komunikacji z RS232, przetworni-
kami i wyświetlaczem LCD.
Marcin Wiązania
P.S. Pliki programów oraz rysunki płytek
drukowanych można ściągnąć ze strony in-
ternetowej EdW.
Rys. 9
Rys. 10
20
Listy od Piotra
Elektronika dla Wszystkich
Prezentowany cykl artykułów przeznaczo-
ny jest wyłącznie dla „analogowców”, czy-
li tych, którzy budują układy analogowe, za-
równo audio, jak i pomiarowe. Poniższego ar-
tykułu pod żadnym pozorem nie powinni czy-
tać ci, którzy wykorzystują wyłącznie układy
cyfrowe! „Cyfrowcy” zajmują się dziedziną
nieporównanie łatwiejszą, a podane dalej
informacje mogłyby im poważnie zaszko-
dzić, na zawsze odbierając spokój umysłu!
Z podanym materiałem powinni ko-
niecznie zapoznać się wszyscy ci, którym
wydaje się, iż konstruktorem można zo-
stać w dwa tygodnie po zainteresowaniu
się elektroniką i po przeczytaniu kilku
książek. Podane informacje uświadomią
im, że dobry konstruktor musi zdobyć
solidną dawkę wiedzy teoretycznej i prak-
tycznego doświadczenia, a tego nie
sposób osiągnąć ani w dwa tygodnie,
ani nawet dwa miesiące.
Uwaga! Osoby niepełnoletnie
mogą przeczytać niniejszy artykuł
wyłącznie pod opieką wykwalifiko-
wanych osób dorosłych!
Artykuł zawiera bowiem wiele
szokujących wiadomości, które mo-
gą nieprzygotowanego odbiorcę po-
zbawić snu, doprowadzić do cięż-
kiego rozstroju nerwowego, a na-
wet do śmierci ze zmartwienia.
Ukryte parametry
ścieżek i połączeń
Okazuje się, że przyczyną wielu kłopotów
z układami analogowymi są też pewne para-
metry elementów elektronicznych oraz ście-
żek płytki drukowanej i połączeń przewodo-
wych, które zazwyczaj są pomijane. Tylko na
schemacie ideowym wszystko prezentuje się
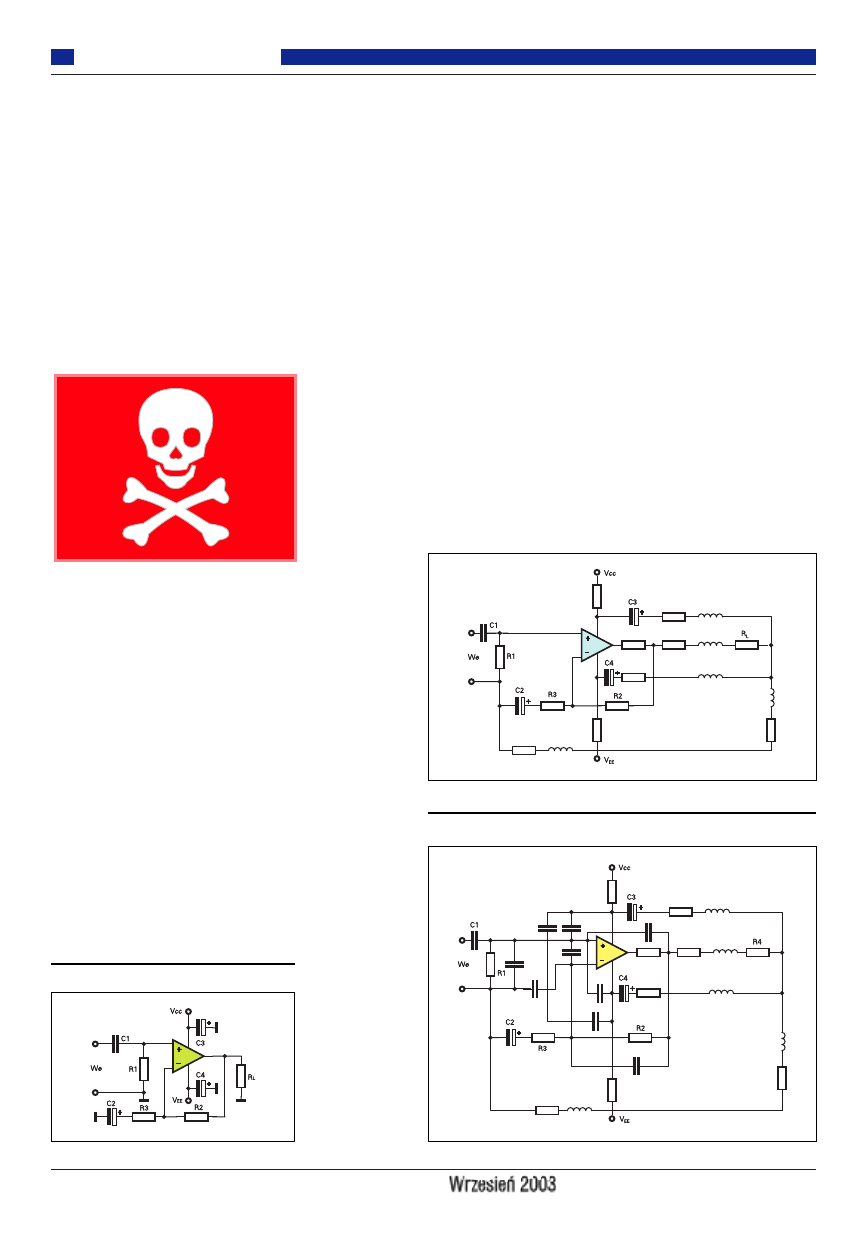
idealnie. Trzeba jednak pamiętać, że schemat
ideowy, na przykład ten z rysunku 25 nie
odwzorowuje dokładnie rzeczywistości. Nie
uwzględnia na przykład szkodliwych pojem-
ności montażowych oraz wzajemnego sprzę-
żenia obwodów, jakie wystąpią w rzeczywi-
stym urządzeniu. Schemat ideowy nie
odwzorowuje także innych oczywistych pa-
rametrów rzeczywistego układu. Na przykład
rysując schematy, zazwyczaj nie zastanawia-
my się nad rezystancją połączeń. Zastanów
się chwilę: czy masz świadomość, że rysując
schemat zakładamy, iż połączenie między
elementami ma rezystancję równą zeru.
A jak to jest w rzeczywistości?
Na razie, nie ma nadprzewodników, które
mogłyby pracować w temperaturze pokojo-
wej. Każdy kawałek drutu czy ścieżki druko-
wanej ma jakąś niezerową, mierzalną rezy-
stancję. Każdy kawałek drutu i każda ścieżka
mają też jakąś indukcyjność własną. W nie-
których, na szczęście rzadkich, sytuacjach
należałoby uwzględnić tę oporność i induk-
cyjność ścieżek - prowadzi to do schematu ide-
owego jak na przykład na rysunku 26. Jeśli
przez te rezystancje
i indukcyjności po-
płyną prądy, po-
wstaną w
nich
spadki napięć, które
w pewnych oko-
licznościach mogą
stać się przyczyną
zwiększenia znie-
kształceń, szumów,
a nawet samowzbu-
dzenia układu. Nie
są to wprawdzie
duże rezystancje
i indukcyjności, ale
na przykład we
wzmacniaczach
mocy, w pewnych
czułych i precyzyj-
nych układach
oraz w układach
w.cz. nie można ich
pominąć.
Indukcyjności
i rezystancje to nie
wszystko. Do tego
dojdą pojemności
montażowe, zależ-
ne właśnie od spo-
sobu montażu.
Nasz prosty sche-
mat po uwzglę-
dnieniu pojemno-
ści montażowych
rozrasta się do
przerażającej po-
staci. Rysunek 27
uwzględnia nie-
które z tych pojemności. Oczywiście powinie-
neś mieć świadomość, że nawet rysunek 27
nie reprezentuje wszystkich właściwości rze-
czywistego układu. Przecież pojemności wy-
stępują dosłownie między wszystkimi po-
szczególnymi obwodami, a każda ścieżka
i drut mają jakąś rezystancję i indukcyjność.
Szczerze mówiąc, nie sposób narysować sche-
matu, który precyzyjnie odzwierciedlałby
wszystkie pasożytnicze pojemności. Każdy
część 4
Rys. 25
Rys. 26
Rys. 27
O paskudztwach i czarodziejach,
czyli zakłócenia w układach elektronicznych
schemat będzie tylko jakimś uproszczeniem
– modelem rzeczywistości.
Co jeszcze ważniejsze, zależnie od sposo-
bu montażu, te rezystancje, indukcyjności
i pojemności będą inne. W każdym razie gro-
teskowy wręcz rysunek 27 wskazuje na wy-
jaśnienie kolejnego „magicznego” zjawiska,
którego nad podziw często doświadczają
elektronicy, zarówno początkujący, jak i zaa-
wansowani: układ eksperymentalny prowi-
zorycznie zmontowany „w pająku” pracował
dobrze, a te same elementy identycznie połą-
czone, wlutowane w płytkę działać nie chcą
lub działają źle. I tak bywa dość często, zwła-
szcza w konstrukcjach niedoświadczonych
elektroników. Przyczyną są właśnie szkodli-
we parametry połączeń źle zaprojektowanej
płytki drukowanej.
Pamiętaj o tych pasożytniczych czynni-
kach, ale nie musisz się nimi nadmiernie stre-
sować. Na szczęście w praktyce w prost-
szych układach małej mocy w ogóle nie trze-
ba się przejmować omawianymi szkodliwy-
mi czynnikami, a w układach dużej mocy
oraz w precyzyjnych i odpowiedzialnych wy-
starczy uwzględnić te szkodliwe czynniki
tylko w kluczowych obwodach. Oczywiście
kwestią wiedzy, doświadczenia i wprawy jest
określenie, które obwody i punkty są kluczo-
we, ale to zupełnie inna historia. Właśnie tu
masz kolejny dowód, że dobrym konstrukto-
rem nie można zostać po przeczytaniu kilku
książek i czasopism. Zrozumienie, jak działa
układ, to dopiero początek. Potem następuje
etap zdobywania wiedzy i doświadczenia
w kwestii rozmaitych na pozór drobnych
szczegółów. Niniejszy artykuł z konieczności
nie może objąć wszystkich najdrobniejszych
aspektów zagadnienia. Sygnalizuje tylko
problem pomijanych właściwości ścieżek
i przewodów, który może się ujawnić w roz-
maity sposób.
Rezystancja
Jeśli chodzi o przewody, ich oporność można
wyliczyć ze znanego szkolnego wzoru:
R =
ρ*l / S
gdzie l to długość drutu w metrach, S – jego
przekrój (nie średnica) w milimetrach kwa-
dratowych,
ρ - rezystywność materiału
[
Ωmm
2
/m]:
Przykładowo 20cm drutu miedzianego o śre-
dnicy 0,3mm (przekrój 0,07mm
2
) będzie
mieć rezystancję:
R = 0,017
Ωmm
2
/m*0,2m/0,07mm
2=
= 0,048
Ω = 48mΩ
48 miliomów to rezystancja w sumie nie-
zbyt duża, ale na przykład przy przepływie
przez nią prądu 200mA spadek napięcia na tej
rezystancji wyniesie prawie 10mV, co w nie-
których czułych układach pomiarowych mo-
że wiązać się ze znacznymi błędami pomiaru.
Znacznie gorzej jest ze ścieżkami, które
tylko na pozór są masywne. Patrząc na pła-
ską ścieżkę, widzimy jej szerokość, a zwykle
zapominamy, że jest ona bardzo cienka – gru-
bość miedzi wynosi typowo 0,035...0,038mm,
czyli 35...38 mikrometrów. O ile na przykład
drut o średnicy 1mm ma przekrój 0,785mm
2
,
o tyle ścieżka o szerokości 1mm ma przekrój
tylko
S = 0,035x1 = 0,035mm
2
czyli ponad 22 razy mniejszy! Oczywiście
będzie mieć 22 razy większą rezystancję.
Oto inny przykład: typowy przewód mon-
tażowy o przekroju 0,35mm
2
chcemy zastąpić
równoważną ścieżką. Żeby uzyskać taką sa-
ma rezystancję, ścieżka taka musiałaby
mieć... 10mm szerokości. W układach więk-
szej mocy zgodnie z powszechnie dostępny-
mi wskazówkami często stosujemy przewody
o przekrojach rzędu 1,5mm
2
...4mm
2
. Próba
zastąpienia przewodu o przekroju 2,5mm
2
ścieżką wymagałaby szerokości ponad 7cm.
Początkującym elektronikom wydaje się,
że rezystancję ścieżki można radykalnie
zmniejszyć przez pocynowanie jej. Taka idea
jest z gruntu błędna!
Warstewka cyny jest zwykle cienka, po-
równywalna z grubością ścieżki, a przewod-
ność cyny jest prawie siedem razy mniejsza
niż miedzi. Tym samym cienka warstewka
cyny naprawdę niewiele pomoże, aby zmniej-
szyć rezystancję ścieżki o połowę, grubość
warstwy cyny musiałaby wynosić około
0,25mm. W rzadkich przypadkach, gdy trze-
ba koniecznie zmniejszyć rezystancję ścieżki,
należy dolutować do niej przewód, drut mie-
dziany lub srebrzankę o możliwie dużej śre-
dnicy. W przypadku układów w.cz. pocyno-
wanie ścieżek zawsze jest ewidentnym błę-
dem z uwagi na zjawisko naskórkowości –
cynowanie ścieżek w obwodach w.cz. nie
zmniejsza, tylko zwiększa ich rezystancję.
Młodzi, niedoświadczeni elektronicy za-
fascynowani możliwościami współczesnych
programów projektowych oraz możliwościa-
mi wytwórców płytek, zdecydowanie za czę-
sto stosują w swych projektach zbyt cienkie
ścieżki. Fakt, że program projektowy ma do-
myślnie ustawione ścieżki o szerokości
10...15 milsów (0,25...0,37mm), nie znaczy,
że wszystkie ścieżki płytki powinny mieć ta-
ką szerokość. Ścieżki, w których płynie prąd
o wartości powyżej miliampera, zwłaszcza
ścieżek zasilania i masy, powinny być zdecy-
dowanie szersze. Szerokości 40...140 milsów
(1...4mm) wcale nie są przesadą.
Podane przykłady mają Cię uwrażliwić na
problem rezystancji ścieżek i zwalczyć po-
wszechne, złudne wrażenie dotyczące „sze-
rokich” ścieżek.
Do obliczania rezystancji ścieżek można
wykorzystać podany wcześniej wzór – wy-
starczy obliczyć przekrój ścieżki, mnożąc jej
szerokość wyrażoną w milimetrach i grubość
miedzi (0,035...0,038mm). Przykładowo
ścieżka o długości 10cm i szerokości 10 mil-
sów (ok. 0,25mm) na typowej płytce druko-
wanej o grubości miedzi 0,038mm będzie
mieć rezystancję około 0,18
Ω. Prawie 0,2Ω
to dość duża rezystancja i spadek napięcia na
niej może zakłócić działanie układu.
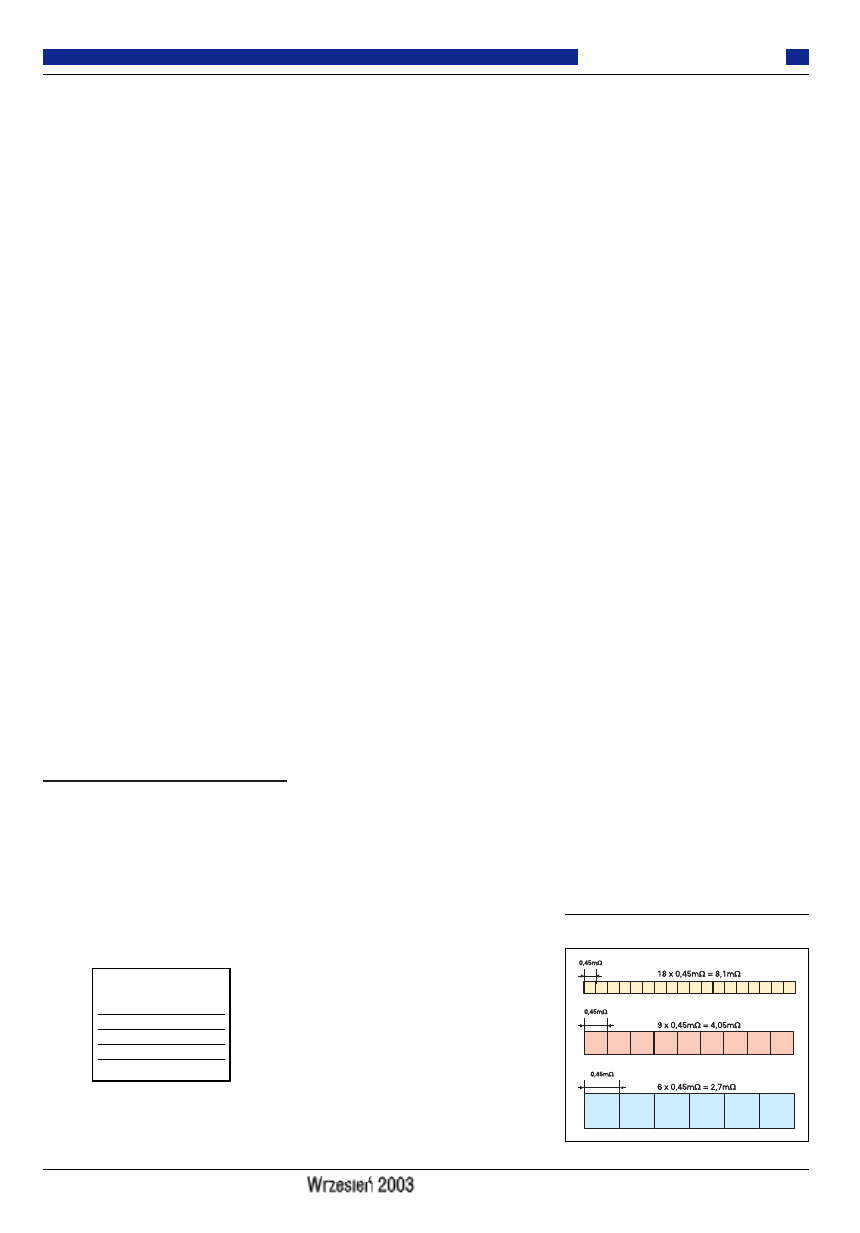
Warto też wiedzieć o innym zaskakują-
cym, a bardzo prostym sposobie obliczania
rezystancji ścieżek: zamiast wykorzystywać
podany wcześniej wzór, wystarczy zapamię-
tać, że typowa ścieżka o grubości 0,038mm
ma 0,45 milioma „na kwadrat”. Oznacza to,
że niezależnie od szerokości ścieżki, każdy
kwadracik dodaje rezystancję 0,45m
Ω, nie-
zależnie od szerokości ścieżki, jak pokazuje
rysunek 28. Przykładowo ścieżka o długości
20mm i szerokości 1mm będzie składać się
z 20 „kwadracików”, czyli jej rezystancja
wyniesie 20*0,45m
Ω = 9mΩ. Ścieżka o tej-
że długości (20mm) i szerokości 0,25mm bę-
dzie składać się z (20/0,25=) 80 „kwadraci-
ków”, więc jej rezystancja wyniesie 36m
Ω.
Nawet rezystancje ścieżek rzędu drob-
nych ułamków oma w niektórych zastosowa-
niach naprawdę okazują się istotne. Właści-
wie to nie sama rezystancja jest groźna. Gdy
przez taką „wysokoomową” ścieżkę płyną
znikome prądy, problemu nie ma. Natomiast
gdy popłynie prąd o znacznej wartości, nieu-
chronnie wystąpi spadek napięcia. Ten spa-
dek napięcia może mieć znaczenie w precy-
zyjnych układach pomiarowych. Ale częściej
źródłem kłopotów są spadki napięcia w takt
sygnału zmiennego, które dodają się lub
odejmują od sygnału i mogą być przyczyną
wzrostu zniekształceń, a nawet samowzbu-
dzenia układów audio, głównie stopni mocy.
Oprócz spadku napięcia i związanych
z tym błędów, należy pamiętać o stratach mo-
cy, jakie wywołuje przepływ prądu przez re-
zystancję ścieżek czy przewodów. Co prawda
21
Listy od Piotra
Elektronika dla Wszystkich
Rys. 28
materiał rezystywność
[Ωmm
2
/m]
miedź
0,017
aluminium
0,027
srebro
0,016
cyna
0,115
ołów
0,21
miedź jest jednym z najlepszych przewodni-
ków, ale przy dużych prądach rzędu amperów
druty i ścieżki będą się poważnie grzać.
W niektórych sytuacjach trzeba wziąć pod
uwagę nie tyle kwestię spadku napięcia, tyl-
ko właśnie ściśle z nią związany problem
wzrostu temperatury. W grę wchodzi tu zna-
ny wzór na ciepło Joule’a:
P = I
2
R
oraz właściwości termiczne, a ściślej zdol-
ność odprowadzania tak powstałego ciepła
z przewodnika do otoczenia. Krótko mówiąc,
w publikacjach dla konstruktorów podaje się
prąd maksymalny dla przewodów o różnej
grubości. W przypadku izolowanych prze-
wodów zwykle chodzi o prąd, który nie spo-
woduje przegrzania i uszkodzenia izolacji.
Różne źródła podają w tym zakresie odmien-
ne dane, ale niezależnie od takich dość
znacznych rozbieżności, warto mieć przynaj-
mniej ogólną orientację o skali problemu.
Na przykład przy projektowaniu transfor-
matorów sieciowych przyjmuje się często
maksymalną gęstość prądu w uzwojeniu
równą 2,5A/mm
2
. Jest to stosunkowo mała
wartość, a wynika ze słabych możliwości
chłodzenia uzwojenia, gdzie zwoje są umie-
szczone w bezpośrednim sąsiedztwie, a pod-
czas pracy temperatura wnętrza uzwojenia
nie może przekroczyć +130
o
C lub +150
o
C,
najwyżej +180
o
C, zależnie od parametrów
izolacji użytego drutu i materiału ferroma-
gnetycznego rdzenia transformatora.
Dla pojedynczych przewodów sytuacja
jest lepsza. Tabela 5 pokazuje zależność
orientacyjnego prądu maksymalnego dla
przewodów o różnym przekroju (chodzi
o przekrój w mm
2
, a nie o średnicę).
Tabela 5
W przypadku pojedynczego przewodu
znacznie lepsze są warunki chłodzenia – jak
widać, w takich przypadkach można przyjąć
maksymalną gęstość prądu około 10A/mm
2
.
Jak widzisz, czym większy prąd, tym gęstość
prądu powinna być mniejsza.
Wyjaśnia to też sens napisów spo-
tykanych na zwyczajnych przedłużaczach
sieciowych, mających postać bębna: w stanie
zwiniętym np. 4A, rozwiniętym 10A.
Oczywiście chodzi o znacznie gorsze warun-
ki oddawania ciepła, gdy prawie cały kabel
jest zwinięty na bębnie.
Nie można też
zapomnieć o maksy-
malnej obciążalności
prądowej
ścieżek.
Wcześniej rozważal-
iśmy rezystancję ście-
żek i spadki napięcia,
które mogą być przy-
czyną nieprawidłowego
działania urządzenia.
Teraz mówimy o czymś
poważniejszym: wiesz
już, że ścieżki mają sto-
sunkowo dużą rezys-
tancję, więc płynący
prąd będzie je nagrze-
wał, a w skrajnym przy-
padku nastąpi odkleje-
nie ścieżki od płytki i jej przepalenie – odcinek
ścieżki zadziała jak bezpiecznik – stopi się.
Oczywiście dotyczy to prądów rzędu ampe-
rów, a nie miliamperów, ale o problemie trzeba
pamiętać. Na pewno zawsze trzeba zastosować
ścieżki o szerokości wykluczającej ich prze-
grzanie i przepalenie, a w niektórych przypad-
kach trzeba też uwzględnić wzrost temperatu-
ry i niepotrzebne straty związane z grzaniem
się ścieżek. W dalszej kolejności można też
uwzględnić wpływ takiego wzrostu temperatu-
ry zarówno na parametry układu, jak i na same
ścieżki (przewody) – miedź ma dodatni współ-
czynnik cieplny (około +0,4%/
o
C), więc rezys-
tancja miedzi rośnie z temperaturą. Tabela 6
pokazuje dopuszczalne prądy dla ścieżek o
różnej szerokości i „standardowej” grubości
miedzi 0,035mm. W tabeli podano, przy jakim
prądzie temperatura ścieżki wzrośnie o 20
o
C, o
80
o
C oraz przy jakim prądzie może nastąpić
przepalenie ścieżki. Warto zapoznać się z tymi
danymi, choć podane prądy mogą się różnić od
rzeczywistości, zależnie od pewnych dodatko-
wych czynników, np. czy ścieżki są cynowa-
ne, czy nałożona jest maska izolacyjna, czy
w sąsiedztwie też są ścieżki wiodące duży
prąd i jakie są warunki chłodzenia.
Tabela 6
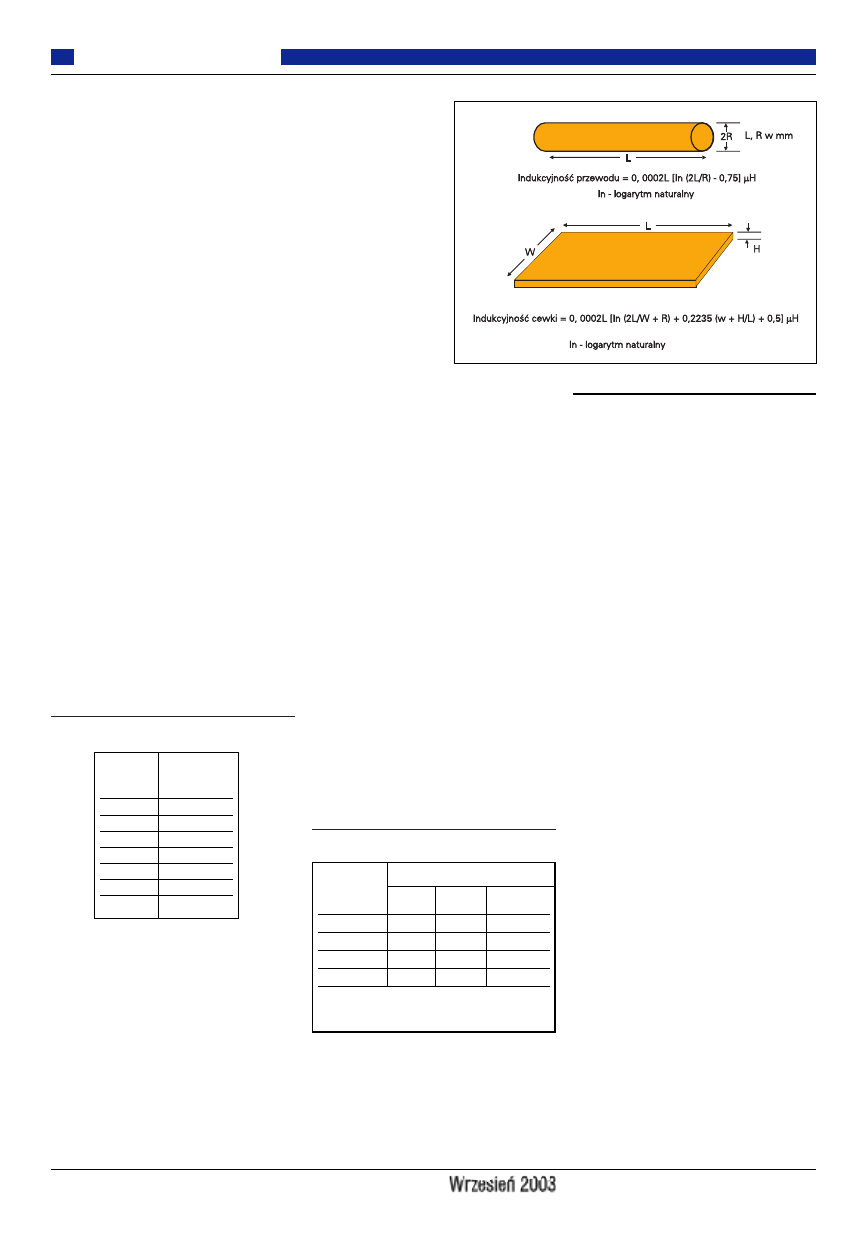
Indukcyjności
Indukcyjność własną pojedynczego prze-
wodu oraz ścieżki na płytce drukowanej
można wyliczyć ze wzorów podanych na
rysunku 29, pochodzącym z noty aplika-
cyjnej firmy Analog Devices.
Łatwo wyliczyć, że 1cm przewodu o śred-
nicy 0,5mm ma indukcyjność 7,26nH, a 1cm
standardowej ścieżki o szerokości 0,25mm
(10milsów) ma indukcyjność 9,59nH.
W praktyce dokładność nie jest tu wyma-
gana, a ścisłe obliczenia przeprowadzane są
rzadko. Szacunkowo można przyjąć, że 1
centymetr przewodu czy ścieżki ma około
10nH. Daje to reaktancję indukcyjną około
0,0
Ω przy częstotliwości 1MHz (0,5Ω przy
10MHz), co może mieć znaczenie w pre-
cyzyjnych systemach 50-omowych.
W urządzeniach o niewielkich rozmiarach
przewody i ścieżki będą więc mieć induk-
cyjność sięgającą co najwyżej kilkudziesię-
ciu nanohenrów. Tak mała indukcyjność da
więc o sobie znać dopiero przy dużych częs-
totliwościach. Przykładowo ścieżka o induk-
cyjności własnej 30nH będzie mieć dla syg-
nałów o częstotliwości 50MHz reaktancję
indukcyjną prawie 10! Ta sama ścieżka dla
częstotliwości 50kHz będzie mała reaktancję
indukcyjną równą 10
Ω miliomów, a taką
wartość prawie zawsze można spokojnie
pominąć w układach m.cz.
Oczywiście indukcyjność ścieżek stworzy
z pojemnościami kondensatorów i pojemnoś-
ciami montażowymi obwody rezonansowe,
co w pewnych przypadkach może poważnie
skomplikować sytuację, a nawet doprowa-
dzić do oscylacji lub zniekształceń i unie-
możliwić prawidłowe funkcjonowanie urzą-
dzenia. Rzecz w tym, że współczesne ele-
menty półprzewodnikowe, zarówno tranzy-
story, jak też liczne układy scalone są bardzo
szybkie. Elementy takie zastosowane w ukła-
dach m.cz. mają za zadanie przetwarzać sy-
gnały o częstotliwościach akustycznych, do
powiedzmy 100kHz. Ale nie można zapo-
mnieć, że wzmacniają one sygnały o często-
tliwościach wielokrotnie większych. I wła-
śnie takie zapomniane indukcyjności i paso-
żytnicze obwody rezonansowe mogą dopro-
wadzić np. do samowzbudzenia na wysokich
częstotliwościach, wzrostu szumów i zniek-
ształceń.
22
Listy od Piotra
Elektronika dla Wszystkich
przekrój maksymalny
[mm
2
] prąd [A]
0,2
2,5
0,3
3
0,5
5
0,75
7,5
1,25
12
2
15
2,5
20
3,5
30
Szerokość
Dopuszczalny prąd
ścieżki
∆
T=20
o
C ∆T=80
o
C prąd
niszczący
0,5mm ((20mil)
1,5A
3,5A
6A
1mm ((40mil)
2,5A
5A
8A
2mm ((80mil)
3,5A
7A
12A
3mm ((120mil)
5A
10A
18A
Uwaga! dotyczy typowej płytki drukowanej
o grubości miedzi 0,035…0,038mm
Rys. 29
O ile niekiedy uwzględnia się i oblicza
indukcyjności własne ścieżek, o tyle prakty-
cznie nie oblicza się wartości indukcyjności
wzajemnych pomiędzy poszczególnymi
obwodami. W praktyce nie ma potrzeby ich
obliczać – wystarczy zastosować wskazówki
podane w odcinku o walce z zakłóceniami
magnetycznymi (EdW 7/2003).
Pojemności
Oprócz rezystancji i indukcyjności, w nie-
których przypadkach należy też uwzględnić
pojemności między elementami, obwodami i
ścieżkami. Jeśli chodzi o pojemności między
elementami i sąsiednimi ścieżkami, zwykle
nie przekraczają one 1pF, chyba że dwie
ścieżki przebiegają tuż obok siebie na dłuż-
szym odcinku.
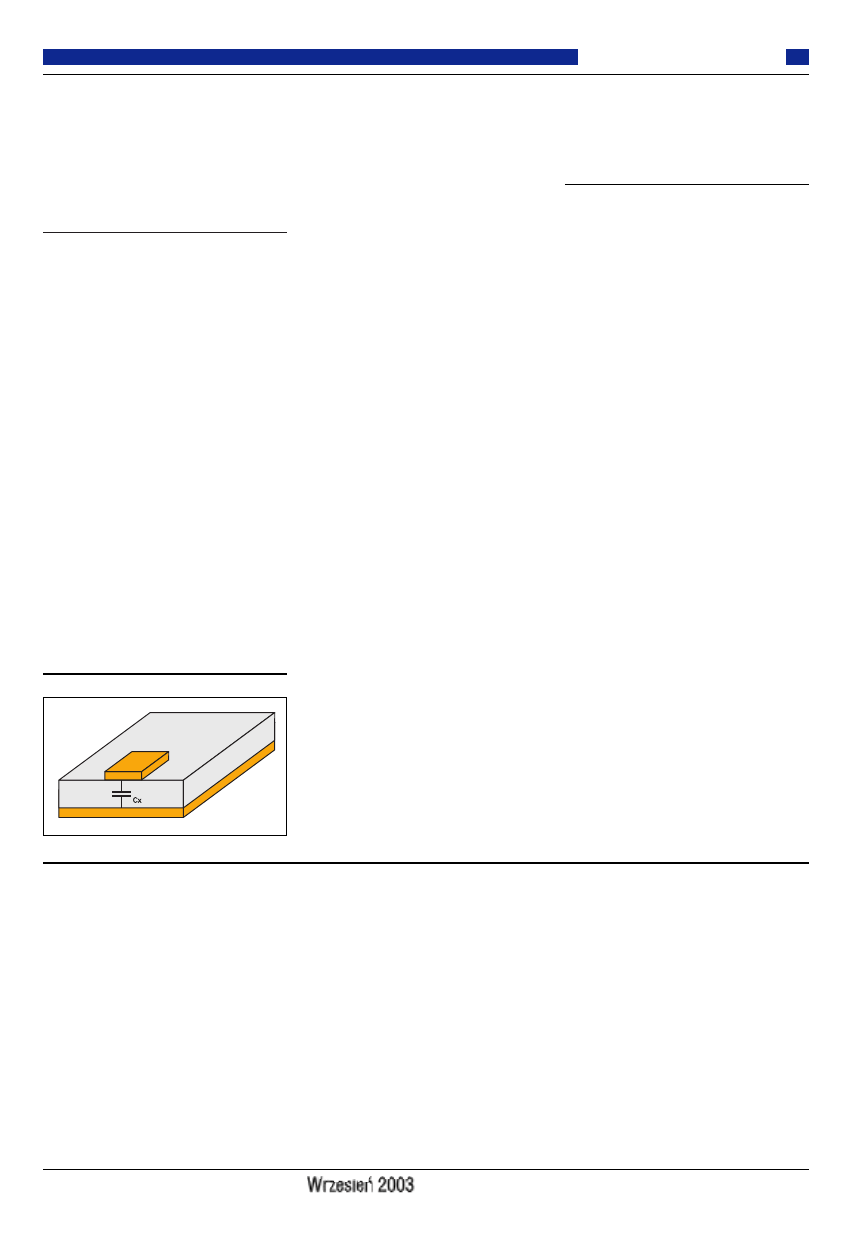
W układach w.cz. oraz w precyzyjnych
urządzeniach pomiarowych i przedwzmac-
niaczach m.cz. dość często jako obwód masy
służy jedna strona dwustronnej płytki druko-
wanej. Wtedy ścieżki umieszczone na dru-
giej stronie płytki tworzą z płaszczyzną masy
kondensatory o niewielkiej pojemności –
patrz rysunek 30. Warto mieć orientację, ja-
ką pojemność mają takie kondensatory. Otóż
w dobrym przybliżeniu pojemność każdego
milimetra kwadratowego ścieżki na typowej
płytce z laminatu epoksydowego do płasz-
czyzny masy wynosi 2,8pF. Oznacza to, że
ścieżka o szerokości 0,5mm (20 milsów)
i długości 10cm umieszczona na takiej płytce
z płaszczyzną masy na drugiej stronie ma
powierzchnię około 5mm
2
, co daje pojem-
ność do masy około 14pF. Oznacza to obec-
ność dodatkowej reaktancji pojemnościowej
do masy: dla częstotliwości 100kHz wynie-
sie ona ponad 100k
Ω, ale przy 10MHz już
tylko nieco powyżej 1k
Ω.
Na pierwszy rzut oka takie pojemności z
każdego punktu do masy wyglądają groźnie,
jednak w praktyce rzadko są przyczyną
poważniejszych kłopotów. Zazwyczaj mimo
wszystko więcej jest korzyści z obecności
płaszczyzny, a nie tylko ścieżki masy, dlate-
go sposób z płaszczyzną masy jest często sto-
sowany i to nie tylko w układach w.cz.
W układach bardzo wysokiej częstotliwości
i w najszybszych układach cyfrowych wyko-
rzystuje się zresztą zależność opisywanej po-
jemności do indukcyjności ścieżki i konstru-
uje tak zwane transmisyjne linie mikropasko-
we. Są to w zasadzie zwykłe ścieżki, ale
dzięki odpowiednio dobranej szerokości ma-
ją ściśle określoną impedancję falową, co za-
pobiega niepotrzebnym stratom i odbiciom.
Choć są to zagadnienia dotyczące głownie
dziedziny w.cz., niemniej także w pewnych
obwodach małej częstotliwości, gdy chodzi
o punkty układu o dużej impedancji, takie
pojemności do masy mogą przeszkadzać.
Dlatego decydując się na wykorzystanie pła-
szczyzny masy warto pamiętać i o tych do-
datkowych pojemnościach.
Także jeśli dwie ścieżki biegną obok sie-
bie na dłuższym odcinku, może dać o sobie
znać pojemność między nimi (mogą sięgnąć
wartości pojedynczych pikofaradów). Je-
szcze silniej problem pojemności występuje
w przewodach, gdzie zawsze występuje po-
jemność miedzy żyłami czy między żyłami
a ekranem. Pojemność zależy od odległości
żył (ekranu) oraz od właściwości zastosowa-
nej izolacji. Można w pierwszym przybliże-
niu przyjąć, że pojemność między sąsiednimi
żyłami przewodu ekranowanego lub płaskie-
go (tasiemki) wynosi 100pF na każdy metr
przewodu (w niektórych kablach może być
jeszcze większa). Jeśli w układzie występują
punkty o dużej impedancji, już pojemności
poniżej 100pF mogą poważnie wpłynąć na
pracę urządzenia, poważnie zwiększając
przesłuchy i zniekształcenia. Warto pamię-
tać, że pojemność 100pF to przy częstotliwo-
ści 20kHz reaktancja poniżej 80k
Ω.
Symulacja
W tym miejscu należy wspomnieć o progra-
mach do symulacji, takich jak np. najbardziej
popularny SPICE występujący w wielu roz-
maitych odmianach. Choć możliwości obli-
czeniowe tego pożytecznego programu są
ogromne, w typowych przypadkach przepro-
wadza się symulację uproszczoną, nieuw-
zględniającą omawianych właśnie szkodli-
wych parametrów rzeczywistego układu. Nie
znaczy to, że program jest zły – to my do sy-
mulacji podajemy uproszczone, nieprecyzyj-
ne dane. Także używane tam biblioteczne
modele elementów, w tym półprzewodniko-
wych, zwłaszcza układów scalonych, są za-
zwyczaj znacznie uproszczone, przez co wy-
niki symulacji często rozmijają się z rzeczy-
wistością w zakresie wysokich częstotliwo-
ści. Taka uproszczona symulacja nie pomaga
w znalezieniu i usunięciu przyczyn proble-
mów, nie może też im zapobiec. Prostych re-
cept tu nie ma, bo w każdym przypadku
w grę wchodzi wiele czynników, a sytuacja
jest inna, bo inne są wymagania stawiane
układowi. Na szczęście w prostszych ukła-
dach nie trzeba przeprowadzać żadnych obli-
czeń, tylko stosować ogólne zdroworozsąd-
kowe reguły: właściwie umieszczone kon-
densatory odsprzęgające, możliwie szerokie
ścieżki. Aby uniknąć problemów, warto też
minimalizować wszelkie pętle prądowe, sto-
sować zwarty montaż, krótkie ścieżki oraz
dobrej jakości elementy czynne i bierne.
W następnej kolejności zajmiemy się ob-
wodem masy, ukrytymi, mniej znanymi para-
metrami elementów elektronicznych oraz
bliżej przyjrzymy się kwestii ekranowania.
Piotr Górecki
23
Listy od Piotra
Elektronika dla Wszystkich
Rys. 30
24
Elektronika dla Wszystkich
Podstawy
Trwałość grota
Przy podejmowaniu decyzji o zakupie lutow-
nicy, a także podczas jej użytkowania trzeba
brać pod uwagę nie tylko moc i możliwości
stabilizacji temperatury. Bardzo ważna jest
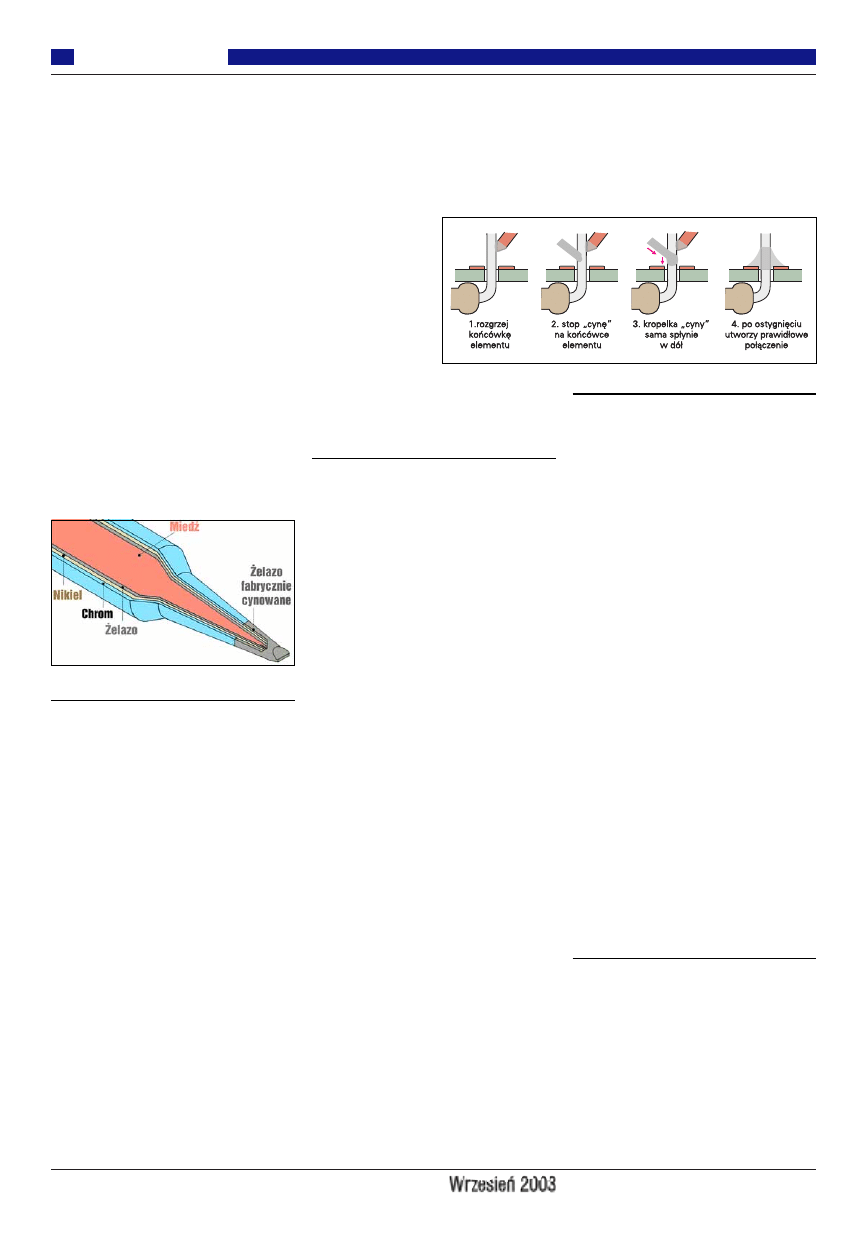
trwałość grota. Dawniej wszystkie tanie lu-
townice miały zwykły grot miedziany. Miedź
zapewnia znakomite przewodnictwo cieplne,
ale ma bardzo istotna wadę: rozpuszcza się
w cynie. W efekcie z czasem cyna „zżera”
końcówkę grota i co jakiś czas grot trzeba
wymieniać. Od pewnego czasu nawet w tań-
szych lutownicach stosuje się miedziane gro-
ty, pokryte cienką warstewką żelaza. Żelazo
zapobiega rozpuszczaniu cyny. W lepszych
grotach występuje kilka warstw – rysunek 8
pokazuje przekrój długowiecznego grota
pewnej znanej firmy.
Oczywiście ze względu na obecność tych
cienkich warstw ochronnych absolutnie nie-
dopuszczalne jest czyszczenie albo formo-
wanie grotów pilnikiem czy papierem ścier-
nym. Nieświadomi amatorzy często psują
warstwę ochronną, gdy uznając, że końców-
ka jest zbyt duża, kształtują grot pilnikiem.
Zasada jest prosta: tylko w najtańszych
lutownicach, gdzie grot ma kolor miedzi,
można go kształtować czy czyścić pilnikiem
i papierem ściernym. Jeśli grot nie ma koloru
miedzi, tylko jest jasno- czy ciemnosrebrzy-
sty, w żadnym wypadku nie wolno używać
pilnika.
Trzeba od razu zakupić grot o odpowie-
dnim kształcie i wielkości końcówki; zwykle
będzie to grot o wąskiej końcówce, umożli-
wiający też pracę z małymi elementami,
w tym SMD. Należy jednak pamiętać o pro-
blemie przekazywania ciepła z grzałki do
końcówki grota. W lutownicach ze stabiliza-
cją pomiar temperatury odbywa się nie na
końcówce, tylko z drugiej strony grota. Pro-
ducenci lutownic i grotów zalecają, żeby grot
w miarę możliwości był jak najgrubszy
i krótki. Wtedy przekazywanie ciepła przez
grot będzie szybkie i temperatura końcówki
lutowniczej nie bę-
dzie różnić się od
ustawionej więcej niż
2...3%. W prostszych
lutownicach przy
grotach długich
i cienkich przekazy-
wanie ciepła jest
utrudnione i podczas
ciągłego lutowania
temperatura końców-
ki może być niższa od oczekiwanej. Dlatego
oprócz „standardowego” grota z cienkim
końcem, warto do grubszych elementów za-
kupić drugi, masywniejszy grot.
Jak lutować?
W ogromnej większości przypadków lutow-
nica używana jest do montażu elementów na
płytce drukowanej. Zwykle (jak choćby
w przypadku kitów AVT) pola lutownicze
płytki są pobielone (pocynowane). Elementy
są nowe, więc ich końcówki są czyste, nieza-
śniedziałe. W takim przypadku lutuje się
szybko, łatwo i bez kłopotów.
W pierwszej części artykułu wyjaśniona
była ważna rola topnika. Podstawowym wa-
runkiem prawidłowego lutowania jest obe-
cność topnika, który usuwa tlenki i nie dopu-
szcza powietrza do strefy lutowania. Podczas
typowego montażu absolutnie wystarczy top-
nik zawarty w druciku „cyny”. Naprawdę nie
ma potrzeby używania innych topników (ka-
lafonii).
Kluczową pytaniem jest: jak i co grzać?
W żadnym wypadku nie należy nakładać
kropli cyny na grot i potem na złącze – to
byłby duży błąd. Taki sposób pracy stosowa-
li kiedyś blacharze, lutujący rynny na da-
chach oraz... aktorzy – taki pożałowania god-
ny sposób „lutowania” można zobaczyć na
niektórych filmach fabularnych. Roztopienie
kawałka drucika stopu na grocie lutownicy
i próba polutowania taką kroplą punktu lu-
towniczego na płytce jest niewybaczalnym
błędem: po roztopieniu spoiwa zawarty
w nim topnik szybko wyparuje i nie spełni
swej ważnej roli podczas lutowania.
Podczas lutowania końcówek elementów
przewlekanych należy koniecznie grzać koń-
cówkę elementu. Nie pole lutownicze, tylko
właśnie drucik końcówki. Pole lutownicze
jest już pocynowane (zwilżone cyną) i głów-
nym celem jest dobre rozgrzanie końcówki,
by umożliwić dobre zwilżenie jej cyną. Do-
piero po rozgrzaniu końcówki należy do-
tknąć końcem drutu lutowniczego do tej koń-
cówki, a wtedy lut i topnik roztopi się i szyb-
ko spłynie z końcówki na punkt lutowniczy.
Ilustruje to rysunek 9, pokazujący poszcze-
gólne fazy procesu.
Początkujący, nie rozumiejąc roli topnika
i rozpuszczenia miedzi w cynie, popełniają tu
rozmaite błędy. Aby ich uniknąć, należy
przyjąć prosta zasadę: podczas typowego lu-
towania należy stopić świeżą cynę na roz-
grzanej końcówce elementu – lut zwilży koń-
cówkę, sam spłynie na punkt lutowniczy
i utworzy prawidłowe połączenie.
Wprawiony elektronik lutuje jedną koń-
cówkę w płytce w ciągu 1 sekundy. Proces
lutowania jednego wyprowadzenia general-
nie nie powinien trwać dłużej niż 2 sekundy.
Wbrew pozorom, dwie sekundy to długi
czas. A lutowanie jednej końcówki typowego
delikatnego elementu przez dłużej niż 5 se-
kund byłoby ewidentnym i niedopuszczal-
nym błędem, grożącym przegrzaniem.
Po wykonaniu połączenia, wokół punktu
lutowniczego zwykle osadzają się resztki
topnika (kalafonii). Jeśli używane było typo-
we spoiwo do celów elektronicznych, nie ma
żadnej potrzeby usuwania resztek topnika.
Nie jest on agresywny, nie powinien też prze-
wodzić prądu. Dodatkowe wykorzystanie ka-
lafonii podczas lutowania to stare przyzwy-
czajenie wcześniejszego pokolenia elektroni-
ków – na pewno niczym nie grozi, ale przy
typowym montażu na płytce z użyciem drutu
lutowniczego z topnikiem w rdzeniu jest nie-
potrzebne. Nie dotyczy to pobielania, które
omówione jest pod następnym śródtytułem.
Pobielanie
Zwykle punkty lutownicze płytki oraz koń-
cówki elementów są albo pocynowane, albo
pokryte stopem, który zapewnia znakomite
warunki lutowania. Nie można tego powie-
dzieć o końcówkach przewodów. Dziś coraz
częściej stosowane są nowoczesne metody
dołączania przewodów, niewymagające luto-
wania, gdzie wykorzystywane są różne styki
i złącza o rozmaitej konstrukcji. Jednak nadal
bardzo często trzeba dołączyć przewody za
Rys. 8
Wszystko o lutowaniu
część 4
Rys. 9
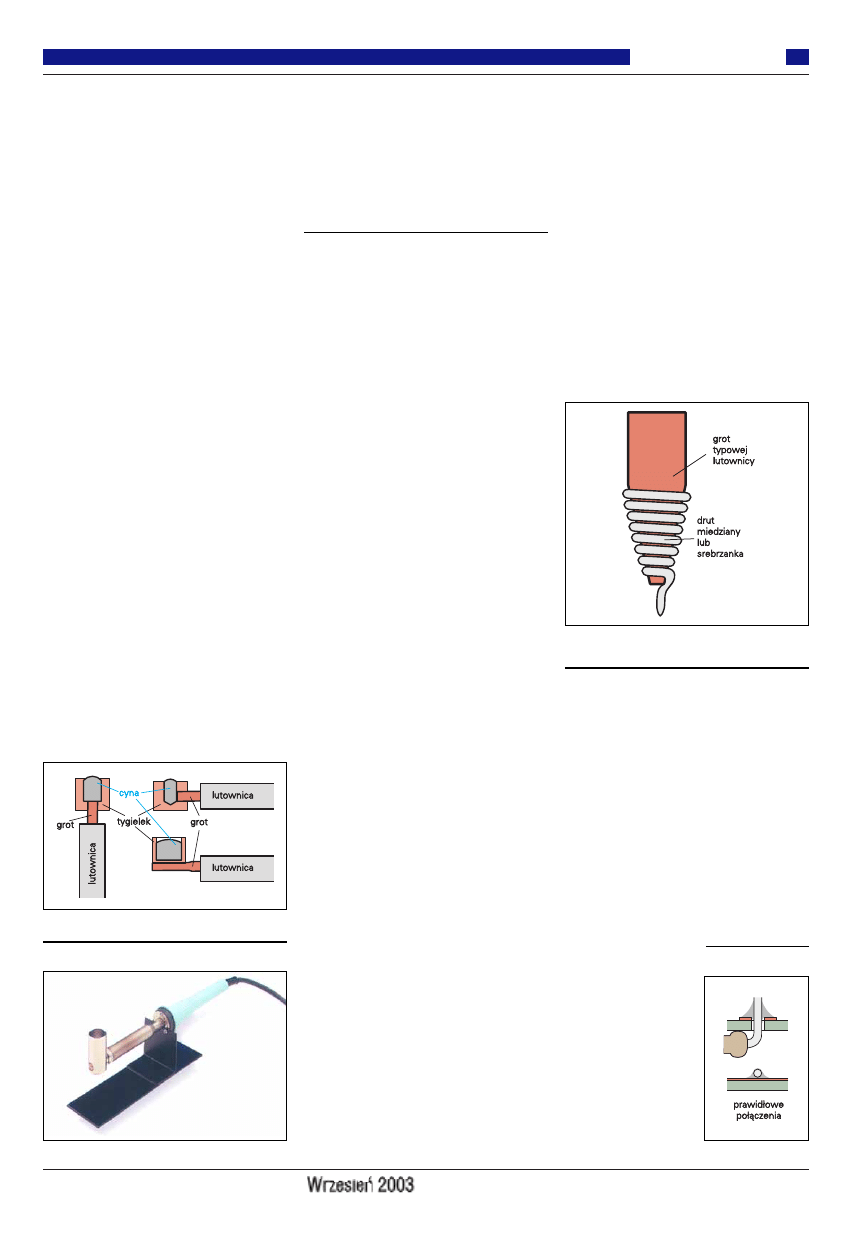
25
Elektronika dla Wszystkich
Podstawy
pomocą lutowania. Przed ostatecznym luto-
waniem przewodów warto pobielić ich odi-
zolowane końcówki, czyli nałożyć na nie
wstępnie trochę „cyny”. Początkujący popeł-
niają tu istotny błąd: próbują nabrać na grot
kroplę cyny i „pomalować” nią końcówkę
miedzianego drutu. Zazwyczaj nie daje to ak-
ceptowalnego rezultatu, głównie z powodu
braku wystarczającej ilości topnika.
Warunkiem prawidłowego pobielenia
jest obecność znacznej ilości topnika, dlate-
go tylko podczas pobielania uzasadnione jest
użycie dodatkowego topnika.
Do fachowego pobielenia dużej liczby
przewodów warto zastosować topnik w po-
staci płynnej i tygielek z płynną cyną. Praca
postępuje błyskawicznie: wystarczy odizolo-
waną końcówkę zanurzyć w topniku, a na-
stępnie na 1...2 sekundy w płynnej cynie.
Przy konieczności pobielenia wielu koń-
cówek przewodów warto sobie zbudować
choćby prowizoryczny maleńki metalowy ty-
gielek z płynną cyną według któregoś pomy-
słu z rysunku 10 i zanurzać w nim końców-
ki, potraktowane uprzednio roztworem topni-
ka – roztworu kalafonii w denaturacie. Po-
wierzchnia cyny w tygielku pokrywa się war-
stewką wypalonego spoiwa i tlenków, więc
okresowo należy tę warstwę usuwać. Foto-
grafia 19 pokazuje fabryczny tygielek
w postaci przystawki do lutownicy.
Odizolowane końcówki przewodów moż-
na też elegancko pobielić za pomocą zwy-
czajnej lutownicy, najpierw rozgrzewając
końcówkę w kawałku kalafonii, potem na-
kładając niewielką ilość cyny. Zamiast roz-
grzewania w kawałku kalafonii warto zanu-
rzyć końcówkę w roztworze kalafonii w de-
naturacie – będzie mniej gryzącego dymu.
Podczas takiego pobielania „na piechotę”
znakomitą pomocą okazuje się tzw. „trzecia
ręka”, którą dziś bez problemu można kupić
w sklepach elektronicznych.
Podczas pobielania niekiedy plastikowa
izolacja przewodu kurczy się i „ucieka”, dla-
tego warto wypróbować, czy i na ile nastąpi
takie kurczenie, by odizolować końcówki na
odpowiednią długość.
Temperatura
Niektórzy niepotrzebnie boją się, że wysoka
temperatura grota, sięgająca prawie 400
o
C
uszkodzi lutowane elementy. Wiedząc, że lut
jest już płynny w temperaturach powyżej
183
o
C sądzą, iż dla uniknięcia przegrzania
warto obniżyć temperaturę lutowania do
200...250
o
C. Niestety, takie rozumowanie
jest z gruntu błędne! Po pierwsze, nie
uwzględnia faktu, że klasyczne przewlekane
elementy elektroniczne są tak budowane, że-
by z powodzeniem przeszły proces ręcznego
lutowania w temperaturze około 350...370
o
C.
Po drugie, co znacznie ważniejsze, tempera-
tura 200...250
o
C jest za niska, żeby skutecz-
nie usunąć tlenki i rozpuścić w cynie war-
stewkę miedzi. A przecież to właśnie jest wa-
runkiem trwałego lutu.
Dla prawidłowego i szybkiego zwilżenia
miedzi cyną przy montażu popularnych ele-
mentów przewlekanych optymalny zakres
temperatur grota to 350...370
o
C.
Dopiero tak gorąca lutownica pozwala na
szybkie lutowanie połączenia dosłownie
w ciągu sekundy. Paradoksalnie, większe
niebezpieczeństwo przegrzania elementu
grozi, gdy temperatura grota jest zbyt niska,
poniżej 300
o
C. Wtedy, aby usunąć tlenki,
zwilżyć i związać łączone elementy, należa-
łoby grzać końcówkę kilka sekund – i wła-
śnie wtedy może grozić przegrzanie. Z kolei
zbyt krótkie lutowanie w takiej niższej tem-
peraturze nie umożliwi dobrego zwilżenia
miedzi cyną i powstaną tak zwane zimne lu-
ty – nietrwałe, bardzo zawodne połączenia.
Jak już wiesz, montaż na płytce klasycz-
nych, przewlekanych elementów należy
przeprowadzić za pomocą dobrze rozgrzanej
lutownicy (+320...+370
o
C), przeznaczając na
wykonanie jednego połączenia 1 sekundę
(maksymalne 2 sekundy).
Lutując przewody do końcówek tranzy-
storów mocy, diod, styków, można śmiało
zwiększyć temperaturę do +370...+390
o
C,
uwzględniając, że grubsze wyprowadzenia
szybciej odprowadzają ciepło i obniżają tem-
peraturę w miejscu lutowania.
W przypadku prostszych elementów, np.
styków i przewodów, zwłaszcza grubszych
można jeszcze bardziej zwiększyć tempera-
turę, nawet do +400...+410
o
C.
Natomiast przy montażu na pobielonych
punktach lutowniczych maleńkich elemen-
tów SMD, które zawsze mają pocynowane
końcówki, można i warto obniżyć temperatu-
rę grota do 300
o
C, a nawet niżej.
Wszystkie powyższe wskazówki dotyczą
posiadaczy stacji z płynną regulacją. Nie każ-
dy takową posiada. I wtedy nie trzeba się za-
nadto przejmować, o ile tylko lutownica ma
moc ponad 20W. Używając lutownicy o małej
mocy, nie można za szybko lutować kolejnych
punktów, żeby grot lutownicy zanadto nie
stygł (patrz rysunek 6 w EdW 5/2003 str. 26).
Większą ostrożność trzeba zachować tyl-
ko przy montażu elementów SMD. Nie-
którzy nakładają wtedy na grot nasadkę
z drutu miedzianego lub srebrzanki według
rysunku 11 o eksperymentalnie dobranej
długości końcówki. Dodatkowy opór cieplny
obniży wtedy temperaturę końcówki, co jest
korzystne, ale oczywiście taki grot będzie
szybko stygł podczas szybkiego lutowania
wielu kolejnych punktów.
Ilość lutu
Istotnym błędem popełnianym przez wielu
elektroników jest używanie zbyt dużej ilości
spoiwa. Dobrze wykonane połączenie można
łatwo poznać po kształcie lutu i po kolorze.
Przy odpowiednio wysokiej temperaturze cy-
na zwilża łączone elementy i sama rozpływa
się po powierzchni końcówki i punktu lutow-
niczego, stąd wklęsły menisk, jasna, błyszczą-
ca powierzchnia. Z czasem elektronik nabiera
doświadczenia i widzi, czy podczas lutowania
cyna dobrze zwilża łączone elementy.
Przekroje prawidłowych lutów pokazane
są na rysunku 12, a nieprawidłowych na ry-
sunku 13. Naprawdę nie ma powodu, żeby
zużywać więcej lutu, niż pokazuje rysunek
12. Na dobrym połą-
czeniu powierzchnia
cyny jest wklęsła. Jeśli
krople cyny są wypu-
kłe, oznacza to nie tyl-
ko marnotrawstwo cy-
ny. Co gorsza wypu-
kłość powierzchni mo-
że świadczyć o tym,
a elementy nie zostały
dostatecznie rozgrzane,
a cyna nie zwilżyła łą-
czonych powierzchni
Rys. 12
Rys. 11
Rys. 10
Fot. 19
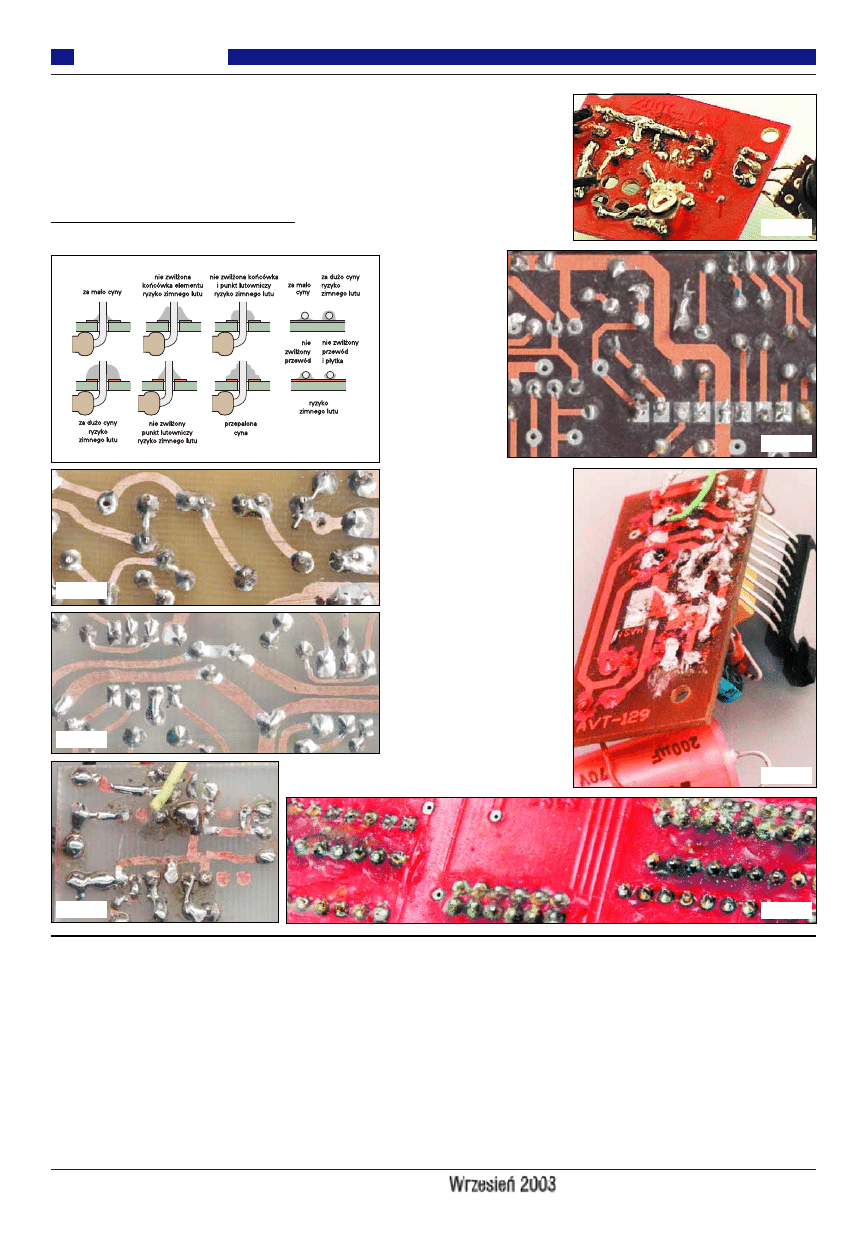
i powstały nietrwałe, tak zwane zimne luty.
Nawet jeśli na razie trzymają – z czasem pu-
szczą, a efektem będą trzaski i szumy oraz
przerwy w działaniu urządzenia. Nie ulega
wątpliwości, że wypukłe krople na punk-
tach lutowniczych są fatalnym świadectwem
umiejętności ich autora.
Prawidłowe luty nie mogą mieć żadnych
ostrych krawędzi, złamań czy sopli. Foto-
grafie 20 i 21 pokazują amatorskie płytki
prawidłowo polutowane za pomocą dobrze
rozgrzanej lutownicy. Z kolei fotografie
22...26 pokazują płytki polutowane ewident-
nie źle. Fotografia 22 pokazuje model nade-
słany przez młodziutkiego uczestnika Szkoły
Konstruktorów.
Modele pokazane
na fotografiach
23...26 otrzyma-
łem z działu Ser-
wisu AVT, dokąd
zostały skierowa-
ne przez klientów
w ramach rekla-
macji źle działają-
cego urządzenia.
Oczywiście nie
można tu mówić
o zasadnej rekla-
macji, bo podsta-
wowym proble-
mem są elementarne błędy
lutowania: zimne luty,
zwarcia i inne uszkodzenia.
Przy okazji trzeba stwier-
dzić, że do Serwisu AVT
trafia dużo, zbyt dużo
podobnych, jeszcze gorzej
polutowanych płytek, a ich
monterzy mają jeszcze pre-
tensje do AVT, że układy
nie działają.
Zbigniew Orłowski
26
Elektronika dla Wszystkich
Podstawy
Fot. 20
Fot. 21
Fot. 22
Fot. 23
Fot. 24
Fot. 25
Fot. 26
Rys. 13
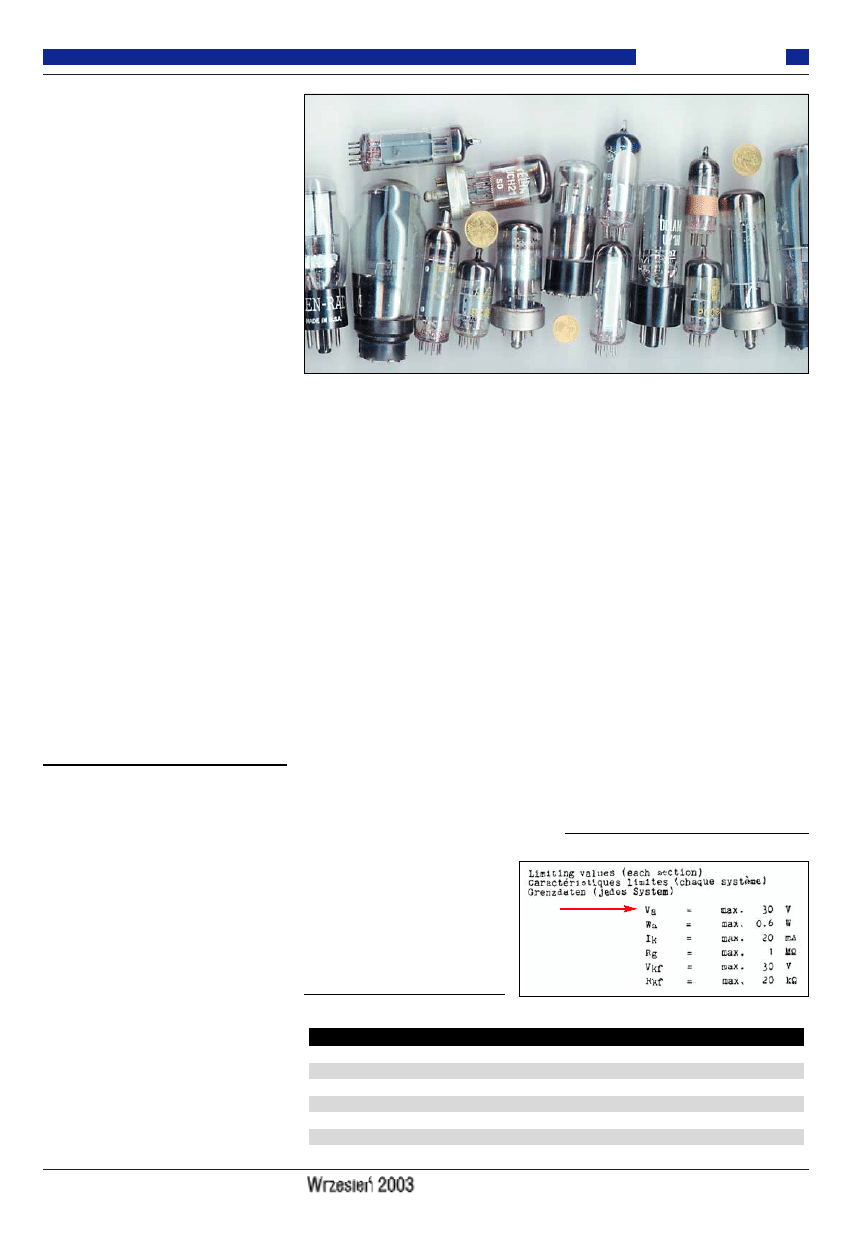
27
Podstawy
Elektronika dla Wszystkich
Przed miesiącem obiecałem Ci, że w niniej-
szym odcinku podam Ci praktyczne wska-
zówki i ku swemu zaskoczeniu zaczniesz
projektować użyteczne układy lampowe. Na
razie zajmiemy się triodą i jej podstawowym
układem pracy. Celowo na korzyść praktyki
pomijam szereg szczegółów, do których je-
szcze wrócimy. Chodzi mi o to, żebyś poczuł
istotę zagadnienia i przekonał się, że projek-
towanie układów lampowych nie jest wcale
takie trudne, jak można byłoby sobie wyo-
brażać. Lampy to w sumie dość prymitywne
elementy i wcale nie jest łatwo je uszkodzić.
W najbliższej przyszłości podam Ci sporą
garść wiedzy na temat podstawowych konfi-
guracji układowych i typowych układów
pracy. Potem zajmiemy się sprawą doboru
punktu pracy lampy. A w tym odcinku, zgo-
dnie z obietnicą, zrealizujesz swój pierwszy
wzmacniacz lampowy. Zanim do tego przej-
dziemy, parę słów o właściwościach lamp.
Napięcie zasilania
Wśród mniej zorientowanych panuje opinia,
że lampy muszą pracować przy napięciu ano-
dowym rzędu setek woltów. Istotnie, we
wzmacniaczach mocy napięcie anodowe wy-
nosi 400...1000V, a nawet więcej. Ale my nie
projektujemy wzmacniacza mocy. Na razie
zajmujemy się wzmacniaczem napięciowym,
którego jedynym zadaniem jest wzmocnienie
(napięcia) sygnału.
I tu mam dla Ciebie zaskakującą informa-
cję: istnieje lampa, która przewidziana jest do
pracy przy napięciu anodowym równym
6,3V oraz 12,6V. Tak jest! To nie pomyłka –
te 6,3V to nie napięcie żarzenia, tylko napię-
cie anodowe! Już się kilka razy przekonałem,
iż nawet elektronicy starszego pokolenia pa-
miętający lampy, z niedowierzaniem przyj-
mowali taką wiadomość. Tymczasem jest to
niezaprzeczalny fakt: lampa ECC86 i jej od-
powiednik 6GM8 opracowane zostały do
dawnych radioodbiorników samochodowych,
by pracowały bez przetwornicy przy napięciu
anodowym pobieranym wprost z akumulato-
ra. Na dowód na rysunku 15 znajdziesz frag-
ment oryginalnej karty katalogowej, z które-
go wynika, że napięcie anodowe nie może
przekraczać 30V! Z kolei rysunek 16 poka-
zuje podstawowe charakterystyki tej lampy.
I co Ty na to?
Ten wręcz szokujący przykład ma Ci
uświadomić ważną prawdę: nie wszystkie
lampy wymagają napięcia anodowego rzędu
setek woltów.
Jakie więc ma być napięcie anodowe
w konkretnym wzmacniaczu? Słusznie przy-
puszczasz, że będzie zależeć od typu i prze-
znaczenia lampy oraz amplitudy przetwarza-
nych sygnałów. Przyjrzyjmy się temu bliżej.
W tabeli 1 znajdziesz zestawienie podstawo-
wych parametrów kilku lamp. Zwróć uwagę,
że nie ma tu podanego minimalnego napięcia
anodowego.
Już tu widać, że lampy ECC86 i ECC88
mogą pracować przy stosunkowo niskich na-
pięciach zasilania. Nie napalaj się jednak na
fantastyczną z pozoru lampę ECC86. Po
pierwsze niełatwo ją zdobyć. Jeśli dopisze Ci
szczęście i ją zdobędziesz, możesz ją zastoso-
wać i sprawdzić, jak sprawuje się w układach
audio. Nie jest to jednak lampa kon-
struowana do sprzętu audio, tylko do
roli wzmacniacza i miksera w.cz. Tu
trzeba lojalnie przyznać, że i wystę-
pująca w tabeli lampa ECC85 też
przeznaczona była głównie do zasto-
sowań w.cz. Tym przeznaczeniem
lamp nie trzeba się jednak nadmiernie
przejmować, zwłaszcza na początku
Twej przygody z lampami. Warto raczej
sprawdzić „na ucho”, jak sprawuje się taka
lampa w danym zastosowaniu. Dotyczy to
także lampy ECC88, która według katalogu
też przeznaczona jest do... tunerów telewizyj-
nych, a do dziś znajduje zastosowanie
w sprzęcie audio. Podobnie jej długowieczna,
nieco ulepszona odmiana E88CC, bardzo czę-
sto spotykana w sprzęcie audio, według kata-
logu przeznaczona jest do wzmacniaczy
w.cz., p.cz., do wzmacniaczy kaskadowych,
mieszaczy i inwerterów fazy oraz do... kom-
puterów (multiwibratory, wtórniki). Jedynie
jeśli chodzi o lampy ECC82 i ECC83, nie ma
wątpliwości – katalog podaje, iż są przezna-
czone do wzmacniaczy audio. W każdym ra-
zie pierwotne przeznaczenie podane w kata-
logu nie powinno odstraszyć od próby wyko-
rzystania danej lampy w sprzęcie audio. Gor-
sza byłaby sytuacja odwrotna: gdyby lampę
przeznaczoną do wzmacniaczy akustycznych
próbować zastosować we wzmacniaczu w.cz.,
przy częstotliwości dziesiątek czy setek me-
gaherców (dałyby o sobie znać znaczne po-
jemności, ograniczające pasmo). Nie trzeba
się też przejmować podawanymi parametrami
c
c
z
z
ęę
ęę
śś
śś
ćć
ćć
33
33
LL
LL
aa
aa
m
m
m
m
pp
pp
yy
yy
ee
ee
ll
ll
ee
ee
kk
kk
tt
tt
rr
rr
oo
oo
nn
nn
oo
oo
w
w
w
w
ee
ee
praktyka i teoria
dla młodego elektronika
Parametr ECC86 ECC88 E88CC ECC82 ECC85 ECC83
1
Max nnapięcie aanodowe
V
30
130
220
300
300
300
2
Moc sstrat ww anodzie
W
0,6
1,8
1,5
2,75
2,5
1
3
Max pprąd kkatody/anody
mA
20
25
20
20
15
8
4
Max nnapięcie ssiatki
V
-330
-550
-1100
-1100
-1100
-550
5
Max rrezystancja RRs
MΩ
1
1
1
1
1
2
6 Max nnapięcie kkatoda-ggrzałka
V
30
50
100
180
90
180
Rys. 15
Tabela 1
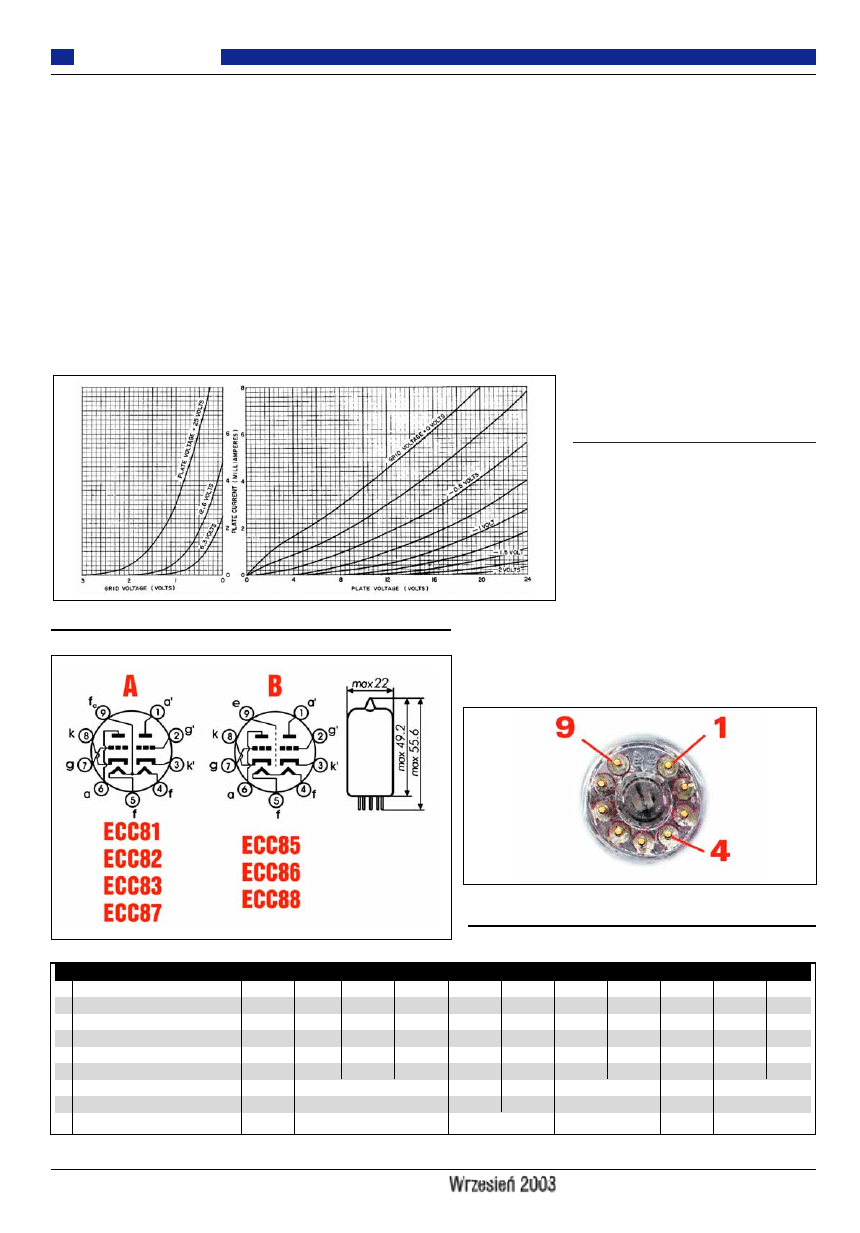
szumowymi, które z reguły dotyczą częstotli-
wości kilkudziesięciu megaherców. Po takim
wyjaśnieniu możesz śmiało przeanalizować
dalsze informacje. W tabeli 2 podane są typo-
we parametry robocze omawianych lamp.
Zwróć uwagę, że dla wszystkich lamp po-
za ECC86 podane w katalogu robocze napię-
cie anodowe jest duże i wynosi co najmniej
90V. Nie zapomnij jednak, iż jest to typowe
napięcie robocze w standardowych zastoso-
waniach. Nie znaczy to, że lampa nie może
pracować przy niższych napięciach – sam się
o tym zaraz przekonasz.
Wszystkie omawiane lampy to podwójne,
niezależne triody. Niezależne, to znaczy każdą
z połówek lampy można dowolnie wykorzy-
stać. Na rysunku 17 masz podane układy wy-
prowadzeń. Jak pokazuje rysunek 17b, w lam-
pach ECC85, ECC86 i ECC88 nóżka 9 jest
połączona z wewnętrznym ekranem. Dołącze-
nie tego ekranu do masy pozwala zmniejszyć
wzajemny wpływ obu sekcji (obu triod), co
ma istotne znaczenie przede wszystkim w za-
kresie w.cz. – stąd inne wykorzystanie nóżki 9
w lampach przeznaczonych do zakresu m.cz.
W lampach zasada numeracji końcówek
jest prosta: bierzemy lampę w rękę, patrzymy
na nóżki i liczymy zgodnie z ruchem wska-
zówek zegara. Ilustruje to fotografia poniżej.
W razie wątpliwości można łatwo upewnić się
co do właściwej numeracji – wystarczy zmie-
rzyć omomierzem oporność włókna żarzenia
(jest mniejsza od 20
Ω), które w lampach 9-
nóżkowych (noval) umieszczone jest zawsze
między nóżkami 4 i 5. Zwróć uwagę, że nie
tylko żarzenie, ale też rozkład podstawowych
elektrod jest we wszystkich wymienionych
lampach identyczny. We wszystkich nóżki 4
i 5 są końcówkami żarzenia. W tym względzie
lampy ECC82 i ECC83 (także ECC81) różnią
się od pozostałych istotnym szczegółem: przy
wykorzystaniu końcówek 4 i 5 napięcie żarze-
nia ma wynosić 12,6V, a prąd żarzenia tylko
150mA (w ECC87 – 300mA). W lampach
tych nóżka 9 jest wyprowadzeniem punktu
połączenia grzejników obu triod. Dzięki takie-
mu szeregowemu połączeniu i wyprowadze-
niu punktu środkowego możliwe jest też ża-
rzenie włókien lamp ECC82, ECC83 i ECC81
napięciem 6,3V (300mA, w ECC87- 600mA).
Napięcie to trzeba podać między nóżkę 9
i zwarte ze sobą nóżki 4 i 5. Ilustruje to rysu-
nek 18.
Wybór lampy
Choć generalnie wszystkie wymienione lam-
py mogą pracować w sprzęcie audio, ja
chciałbym zwrócić Twoją uwagę przede
wszystkim na lampy ECC88 i E88CC, a do-
piero w drugiej kolejności na popularne
ECC82 i ECC83. Wprawdzie bardzo zachę-
cająco wyglądają parametry lampy ECC83,
zwłaszcza jej wyjątkowe duże wzmocnienie
Ka, jednak lampa ta powinna pracować przy
stosunkowo dużym napięciu, a ja na począ-
tek chcę Ci pokazać, że można z powodze-
niem pracować przy zaskakująco niskim na-
pięciu anodowym.
28
Podstawy
Elektronika dla Wszystkich
Parametr ECC86 ECC88 E88CC ECC82 ECC85 ECC83
1
Napięcie aanodowe
V
6,3
12,6
25
90
90
100
250
250
100
250
2
Napięcie ssiatki
V
0
0
0
-11,3
-11,3
0
-88,5
-22,7
-11,0
-22,0
3
Prąd aanodowy
mA
0,9
2,5
7,7
15
15
11,8
10,5
10
0,5
1,3
4
Transkonduktacja - SS
mA/V
2,6
4,6
7,8
12,5
12,5
3,1
2,2
6,1
1,25
1,6
5
Wzmocnienie - KKa
13
15,6
16,4
33
33
19,5
17
55
100
100
6
Rezystancja wwewnętrzna - RRi
kΩ
5
3,4
2,1
2,6
2,6
6,5
7,7
9
80
62,5
7
Napięcie żarzenia
V
6,3
6,3
6,3
6,3 // 112,6
6,3
6,3 // 112,6
8
Prąd żarzenia
mA
330
365
300
300 // 1150
435
300 // 1150
9
Układ wwyprowadzeń ((rys. 117)
B
B
A
B
AA
Rys. 16
Rys. 17
Fot. 1
Tabela 2
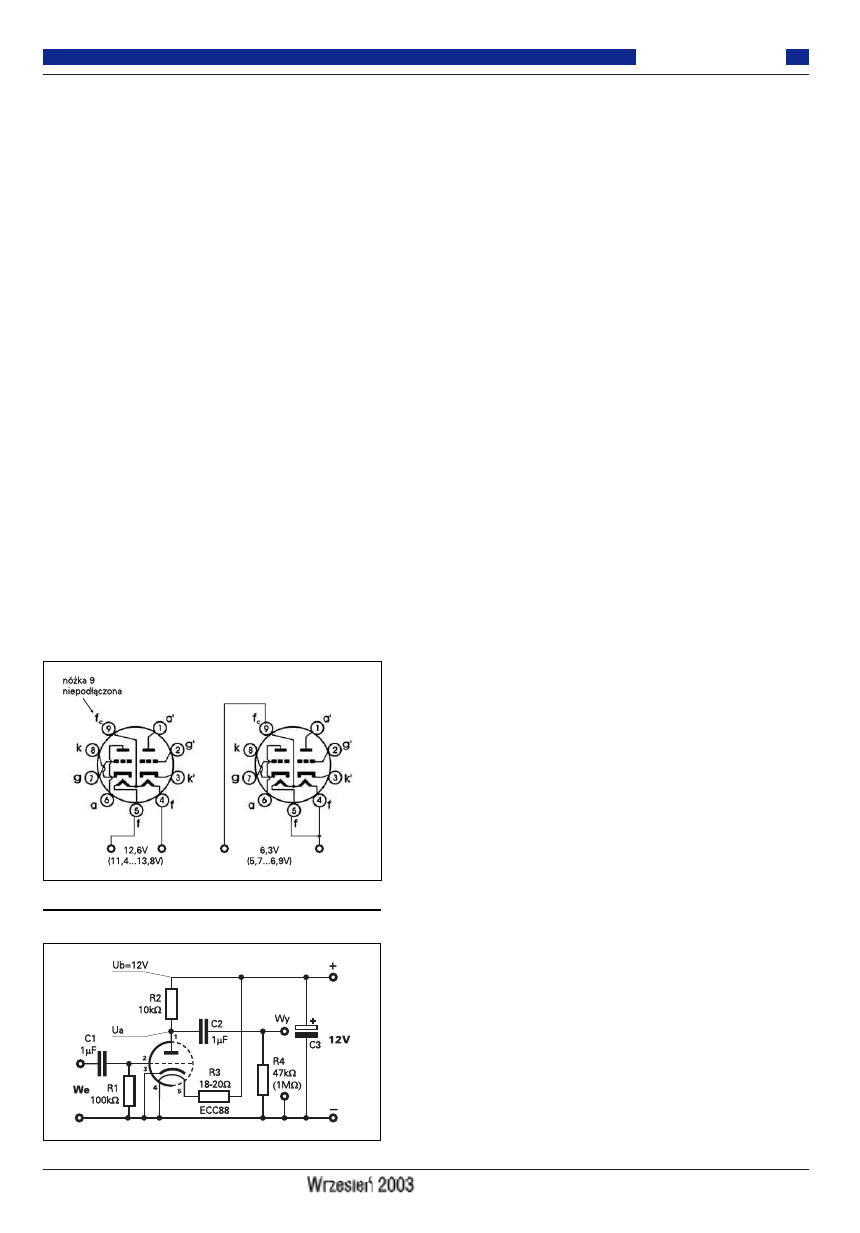
29
Podstawy
Elektronika dla Wszystkich
Dlatego proponuję właśnie lampę ECC88
i jej ulepszoną, długowieczną wersję E88CC.
Poświęćmy teraz uwagę tym właśnie lam-
pom, a później wrócimy do pozostałych.
Najpierw jednak słowo wyjaśnienia o róż-
nicach między ECC88 i E88CC. Lampa
ECC88 jest lampą standardową, natomiast
E88CC jest wersją ulepszoną, mającą taki
sam układ wyprowadzeń i charakterystyki,
tylko rozrzut tych charakterystyk jest mniej-
szy. Co ważne, lampa E88CC ma większą
trwałość – średni gwarantowany czas pracy
wynosi 10 000 godzin, kilkakrotnie więcej
niż wersji standardowej (na marginesie –
lampa elektronowa nie psuje się gwałtownie
– z czasem pomału pogarszają się jej parame-
try i w pewnym momencie trzeba ją wymie-
nić na nowy egzemplarz).
Podobnie możesz spotkać lampę E82CC –
bez chwili zastanowienia stosuj takie ulep-
szone, długowieczną wersję w miejsce
ECC82. Zamiast ECC88 możesz też wyko-
rzystać lampę PCC88, która charakterystyki
elektryczne i wyprowadzenia ma dokładnie
takie jak ECC88, nieco inne jest tylko napię-
cie i prąd żarzenia. Pierwsza litera P pokazu-
je, że lampa przeznaczona jest do tzw. żarze-
nia szeregowego, gdzie prąd żarzenia (połą-
czonych szeregowo włókien kolejnych lamp)
wynosi 300mA. Napięcie żarzenia wynosi
wtedy 7,6V. Moc żarzenia (300mA*7,6V)
jest taka sama, jak w lampie ECC88
(365mA*6,3V).
Odpowiednikami lampy ECC88 są 6DJ8
(USA), 6H23 (ZSRR), lampy PCC88 – 7DJ8
(USA), a lampy E88CC – 6922 (USA), CCa
(Siemens), ECC868 (RFT).
Mamy podstawowe informacje o naszym
elemencie wzmacniającym. Na razie katalo-
gowymi charakterystykami nie będziemy się
zajmować, bo chcę Ci pokazać lampy od naj-
prostszej strony. I tu mam niespodziankę:
chcemy wykonać użyteczny układ lampowy,
zasilany możliwie niskim napięciem. Przeko-
naj się osobiście, na ile fałszywe jest wyobra-
żenie, że lampa nie może pracować przy ni-
skich napięciach zasilania. W czasach, gdy
królowały lampy, uzyskanie napięcia anodo-
wego rzędu stu czy kilkuset woltów nie było
problemem, bo dostępne były liczne transfor-
matory z odpowiednimi uzwojeniami. Dziś
transformatorów z typowym napięciem ża-
rzenia (6,3V) i anodowym już się nie produ-
kuje. My moglibyśmy łatwo poradzić sobie
z uzyskaniem wysokiego napięcia, ale ze
względów dydaktycznych chcemy sprawdzić
pracę lamp przy jak najniższym napięciu za-
silania. Jeśli poznasz kluczowe zależności,
a co ważniejsze - ograniczenia, z łatwością
poczujesz temat i potem wyśmienicie pora-
dzisz sobie z realizacją układu o wyższym
napięciu zasilania.
Żeby na początek nie mieszać Ci w gło-
wie zbędnymi szczegółami, weźmiemy na
warsztat układ najbardziej klasyczny z kla-
sycznych – „książkowy” wzmacniacz ze
wspólną katodą. Oczywiście będzie to
wzmacniacz małej częstotli-
wości (audio), więc nie bę-
dziemy się wgłębiać we
wszystkie szczegóły ważne
przy wysokich częstotliwo-
ściach. Tu od razu chciał-
bym uprzedzić zarzuty osób
zapoznanych z tematem:
układ jest, bo ma być – naj-
prostszy z możliwych i na
razie pomijamy szereg
czynników takich jak nieza-
wodność, typ współpracują-
cych elementów biernych,
wybór punktu pracy, prąd
siatki, kwestie montażowe,
itd. Nie wgłębiając się w ta-
kie szczegóły, odsuwając na
bok ewentualne pytania
i wątpliwości, zbuduj układ
według rysunku 19.
Tak jest – żadnych wyso-
kich napięć! Całość ma być
zasilana pojedynczym napię-
ciem 12V!
Wystarczy do tego jaki-
kolwiek zasilacz stabilizowa-
ny 12V o prądzie co najmniej
400mA.
Wykorzystasz na razie
tylko połowę lampy – jedną
z dostępnych dwóch triod. Druga trioda po-
zostanie wolna, więc nóżki lampy o nume-
rach 6...9 pozostaw niepodłączone. Rezystor
R4 o wartości 47k
Ω udaje tu zewnętrzne ob-
ciążenie i tym samym układ dobrze odzwier-
ciedla rzeczywiste warunki pracy.
Zastosuj lampę ECC88 lub E88CC – re-
zystor R3 ograniczający prąd żarzenia może
mieć wtedy wartość 18...22
Ω. Jeśli masz
lampę PCC88, możesz jej śmiało użyć –
ewentualnie skoryguj tylko trochę rezystan-
cję R4, żeby prąd żarzenia wynosił 300mA
(napięcie żarzenia 7,6V).
Włącz zasilanie i po nagrzaniu włókna ża-
rzenia możesz zmierzyć napięcie stałe na
anodzie mierzone względem masy (katody).
Będzie ono wynosić około 8V.
Już tu chciałbym Cię uczulić na istotną
różnicę między napięciem zasilania, ozna-
czanym często Ub, a napięciem anodowym,
oznaczanym zwykle Ua. Napięcie anodowe
to napięcie między katodą a anodą lampy.
Jest ono zawsze mniejsze od napięcia zasila-
nia Ub, przynajmniej o spadek napięcia na
rezystorze anodowym R2. W naszym ukła-
dzie napięcie zasilania wynosi 12V, nato-
miast napięcie anodowe około 8V.
Taki beznadziejnie prosty układ jest naj-
prawdziwszym wzmacniaczem lampowym.
U mnie w układzie z lampą ECC88 (E88CC)
i rezystorem R2 o wartości 10k napięcie ano-
dowe wyniosło 8,3V, a prąd anodowy 0,4mA.
Podczas testów okazało się, iż przy tak ma-
łym napięciu zasilania, przy zewnętrznym
obciążeniu R4=47k
Ω wzmocnienie wynosi
9,5x, czyli 19,5dB. Z obciążeniem R4=1M
Ω
wzmocnienie było równe 11x (21dB).
Co istotne, taki prymitywny wzmacniacz,
zasilany „skandalicznie” niskim napięciem,
dość dobrze radził sobie ze stosunkowo duży-
mi sygnałami. Oczywiście ze względu na tak
małe napięcie zasilające, zniekształcenia har-
moniczne były znaczne i rosły ze wzrostem
sygnału, ale i tak uzyskane wartości okazały
się zaskakująco dobre. Zmierzyłem zniekształ-
cenia przy częstotliwości 1kHz. Przy sygnale
wyjściowym o wartości międzyszczytowej
1V (1Vpp, czyli 0,355V wartości skutecznej)
wyniosły 2%. Przy sygnale wyjściowym
o wartości 2,5Vpp (0,9Vsk) zniekształcenia
wzrosły do 5%. Dopiero przy jeszcze więk-
szym sygnale wyjściowym 4Vpp (1,41Vsk)
sięgnęły 10%. Tu chciałbym wyraźnie podkre-
ślić, że te zniekształcenia to wyłącznie druga
harmoniczna sygnału, co jest niemal... zaletą.
I oto zrealizowałeś swój pierwszy wzmac-
niacz lampowy. Gratuluję! Możesz go śmiało
wypróbować w praktyce.
Za miesiąc przeprowadzimy szereg eks-
perymentów i pomiarów tego właśnie ukła-
du, zastosujemy też obciążenie aktywne oraz
przeprowadzimy testy innego podstawowego
wzmacniacza – układu ze wspólną anodą.
Piotr Górecki
Rys. 18
Rys. 19
100µF
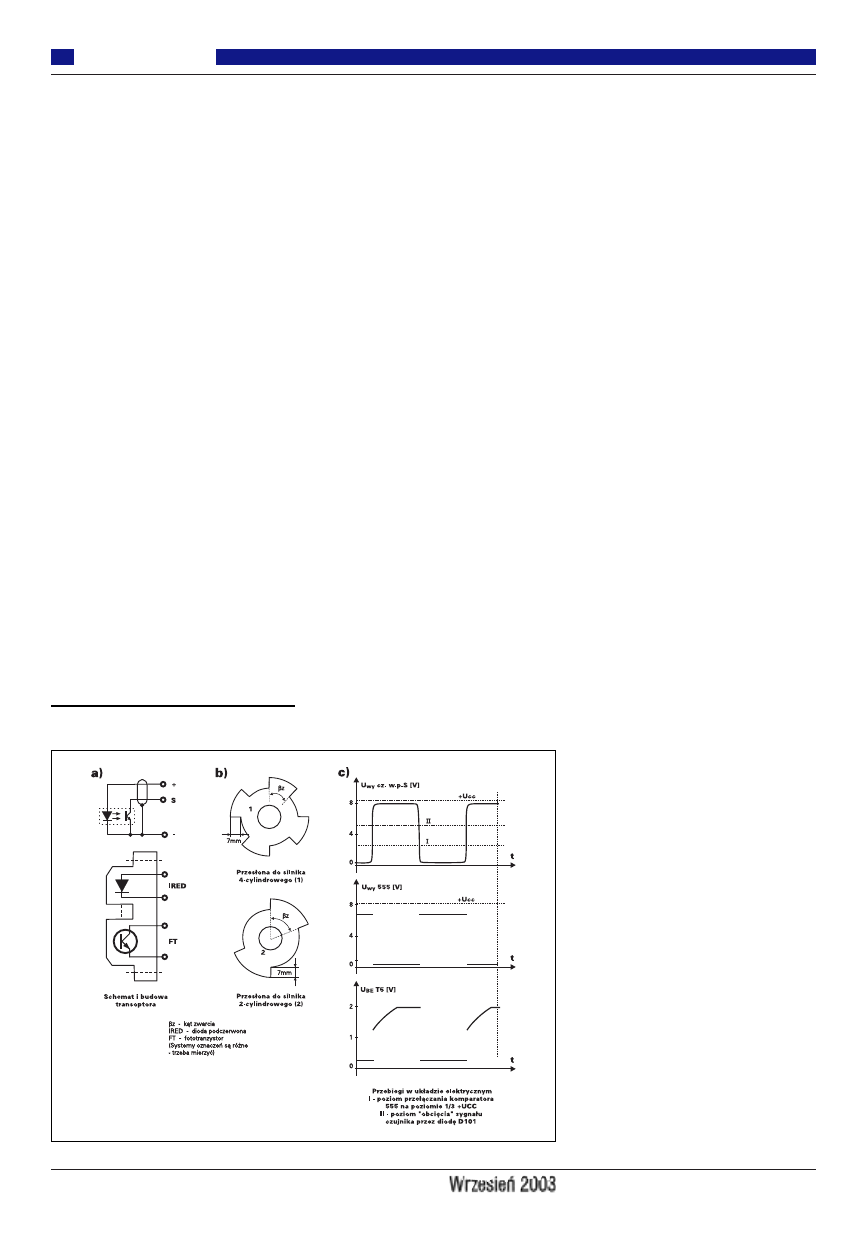
30
Podstawy
Elektronika dla Wszystkich
Czujnik optoelektroniczny
Jest to transoptor dioda-tranzystor, ale o bu-
dowie widełkowej, umożliwiającej przery-
wanie toru świetlnego przez przesłonę obro-
tową umieszczoną na wałku aparatu zapłono-
wego. Przesłona ustala kąt zwarcia
βz, a tak-
że synchronizuje wystąpienie iskry w odpo-
wiednim położeniu wału korbowego.
W układzie tu opisanym, przepływ prądu Im
następuje wtedy, gdy przesłona jest obecna
w szczelinie transoptora. Możliwa jest także
sytuacja odwrotna.
Schemat czujnika i przebiegi w układzie
są podane na rysunku 8. Podstawą prawidło-
wej pracy czujnika jest wprowadzenie w stan
nasycenia fototranzystora przy prądzie diody
świecącej chociaż połowę mniejszym od zna-
mionowego, a ustalanego przez rezystor
R101. Najlepiej, jeśli sprawdzimy, przy ja-
kiej wartości rezystora R101 (R201) zaczyna
się nasycenie fototranzystora. W tym celu za-
miast R101 dołączamy rezystor nastawny
4,7k
Ω i powoli zmieniamy rezystancję od
4,7k
Ω do 470Ω. Gwałtowny spadek napięcia
KE na fototranzystorze sygnalizuje wystą-
pienie nasycenia. Mierzymy wtedy wartość
rezystora nastawnego i wlutowujemy połowę
mniejszy, ale nie niższy od 470
Ω (15mA).
Jeśli wypadnie sporo mniejszy, to oznacza,
że ten typ transoptora nie nadaje się i szuka-
my innego typu o większej czułości. W skle-
pach sprzedawcy na ogół niewiele wiedzą
o parametrach transoptorów. Ja mogę podać
typy, które stosowałem i polecam, a są to:
TCST2000, TCST1103, TCST2203, IS02
a także elementy pojedyncze o średnicy
3mm, z których można zbudować transoptor
bardzo dobrej jakości, tj. IRED TEMT1209,
FT-SFH309-6. Elementy optoelektroniczne
(aby zidentyfikować) trzeba wiedzieć jak
mierzyć, najlepiej omomierzem analogo-
wym. Dioda podczerwona przy pomiarze re-
zystancji zachowuje się jak zwykła dioda
krzemowa, ale z większą rezystancją w kie-
runku przewodzenia. Natomiast fototranzy-
stor bardzo reaguje zmniejszeniem rezystan-
cji, jeśli wystawimy go na światło (np. odsła-
niamy ręką) i będzie dołączony plus omo-
mierza na kolektor. Jeśli dołączymy minus
omomierza do kolektora, to reakcja na świa-
tło będzie minimalna.
Przy projektowaniu przesłony, oprócz do-
brania średnicy zewnętrznej i wewnętrznej,
tak aby zmieściła się w aparacie przy zamon-
towanym transoptorze, musimy ustalić opty-
malny kąt zwarcia z do wybranej cewki za-
płonowej. Ponieważ nasz układ ma być jak
najbardziej uniwersalny, polecam zastosowa-
nie cewki 4240 (lub101). Jest to cewka uni-
wersalna o rezystancji 1,5
Ω/9,5mH i może
pracować w układzie bezrozdzielaczowym
we fiacie 126p, z modułem sterowanym
przerywaczem, jak i czujnikiem bezstyko-
wym. Może też pracować we fiacie 125 lub
w polonezie, tworząc układ podwójny tj. dwa
czujniki w odległości kątowej 90
o
, dwa mo-
duły i dwie cewki zapłonowe, gdzie każda
cewka obsługuje dwa cylindry (1-4 i 2-3). Je-
śli cewka będzie połączona w układzie z roz-
dzielaczem zapłonu, to jeden biegun wyso-
kiego napięcia trzeba połączyć z masą lub
plusem zasilania. Zalecany prąd Im cewki
4240 o wartości 4,5A i kącie zwarcia 60
o
bę-
dzie zachowany do ok. 4500 obr./min. Przy
5000 obr. będzie około 4,2A a przy 6000 obr.
około 3,7A, co w zupełności wystarczy do
prawidłowej pracy silnika, gdyż prądowi
3,7A odpowiada ok. 26kV wysokiego napię-
cia. Pomiar wysokiego napięcia na oscylo-
skopie w laboratorium ZELMOT-u wykazał,
że przy Im=4,5A wysokie napięcia wynosiło
32kV przy obciążeniu 50pF. Jeśli zdecyduje-
my się na cewkę 4226, to trzeba ustalić inny
kąt zwarcia. Obserwacja narastania prądu na
oscyloskopie wykazuje, że jeśli Im=5A osią-
gany jest w ciągu 2,5ms (przy +Uz=14V),
przy założeniu, że prąd taki nie powinien
spadać do 5000 obr./min., a aparat zapłono-
wy obraca się w tym czasie o 90
o
w ciągu
6ms, to kąt zwarcia wystarczy 37,5
o
. Z kolei
obliczenie energii wyładowania wykazuje, że
oby otrzymać ją niemniejszą niż z cewką
4240, należy prąd Im zwiększyć do 5,3-5,5A,
a to wskazuje, że kąt z trzeba zwiększyć do
ok. 45
o
, a wtedy spadek Im zacznie się od ok.
5500 obr/min., co w zupełności wystarczy.
Forsowanie pełnego prądu Im do maksymal-
nej prędkości obrotowej nie jest konieczne,
bo i tak mało jeździmy z pełną szybkością,
a spadek wysokiego napięcia o kilka procent
nie ma znaczenia dla nagrzanego silnika,
podczas gdy w układzie klasycznym spadek
ten wynosi ok. 2,5 raza. Od wartości kąta
zwarcia, rezystancji cewki oraz liczby cylin-
drów zależą straty cieplne (głównie w tranzy-
storze mocy, jeśli cewka jest „elektronicz-
na”). I tak: jeśli cewka jest klasyczna, to ra-
diator jest zbędny dla tranzystora w obudowie
T03 lub niewielki dla obudowy TO218 czy
220, jeśli cewka uniwersalna ok. 1,5
Ω i silnik
2-cylindrowy, to jest potrzebny radiator o po-
wierzchni 70-80 cm
2
z blachy Al. gr. 2 mm,
jeśli cewka „elektroniczna” 0,6-0,8
Ω i βz 45
o
oraz silnik 4-cylindrowy, to potrzebny radia-
tor żebrowany o masie ok. 200g lub obudowa
aluminiowa o podobnej wadze, ale wtedy
tranzystor mocy należy izolować, gdyż obu-
dowa powinna być połączona z masą. Szcze-
gólnie duże straty występują przy małych
prędkościach obrotowych, bo kąt zwarcia jest
stały i wielokrotnie za duży do osiągnięcia
przez cewkę prądu Im. Tu przydałby się
układ elektroniczny, który zmieniałby
Rys. 8 Elementy czujnika optoelek-
tronicznego
Samochodowe urządzenia zapłonowe
część 2
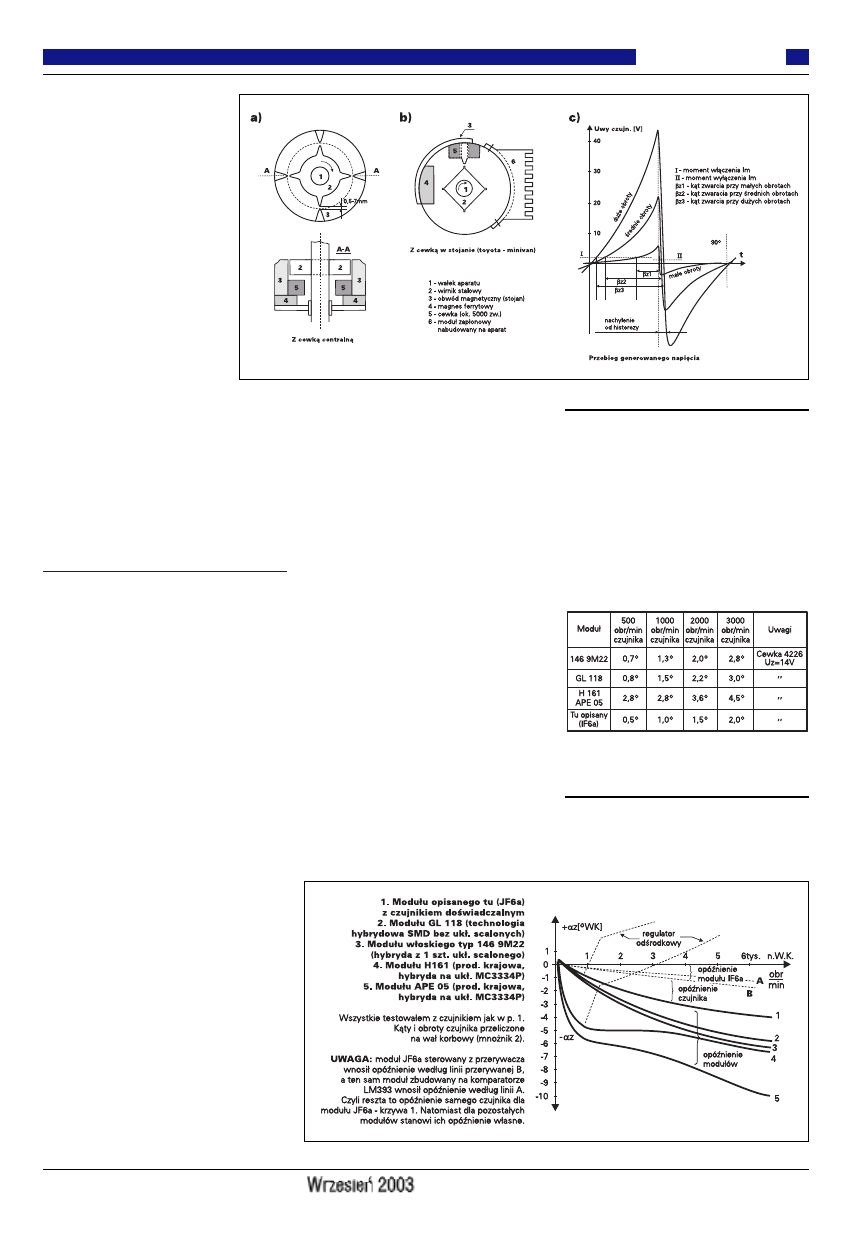
automatycznie kąt zwarcia w za-
leżności od prędkości obrotowej.
A może ktoś z Czytelników zbu-
dował taki układ lub wie, jak zro-
bić, aby kąt zwarcia był mały
przy mniejszych obrotach i wy-
dłużał się przy wzroście prędko-
ści obrotowej, nie zmieniając ką-
ta zapłonu, czyli momentu wystę-
powania iskry?
W każdym układzie zapłono-
wym występuje zjawisko opóź-
nienia iskry ze wzrostem prędko-
ści obrotowej. W układach elek-
tronicznych jest to suma opóźnie-
nia czujnika oraz modułu. Opóź-
nienie urządzenia zapłonowego
sterowanego czujnikiem optoe-
lektronicznym nie jest duże i wy-
nosi 1-1,5
o
OWK przy najwyższych obrotach
i ma charakter liniowy. A ponieważ opóźnie-
nie występujące w układzie klasycznym jest
podobne, nie ma potrzeby korekcji regulato-
ra odśrodkowego. Zupełnie inaczej jest
w układach z czujnikami magnetycznymi,
a ponieważ były one najbardziej rozpo-
wszechnione przed wdrożeniem systemów
wtryskowych, chciałbym przedstawić je nie-
co bliżej.
Układy z czujnikami
magnetoindukcyjnymi
Budowa czujnika oraz przebieg generowane-
go napięcia przedstawiony jest na rysunku 9.
Jest to przebieg zbliżony do „piły”, o warto-
ści amplitudy rosnącej ze wzrostem obrotów,
ale przyrost jest zbliżony do krzywej wykła-
dniczej. Przy najniższych obrotach rozrucho-
wych amplituda dodatnia osiąga 0,4-0,6V,
natomiast przy najwyższych obrotach docho-
dzi do 25-50V. Wartość zerowa sygnału wy-
stępuje w momencie, gdy zęby wirnika znaj-
dują się pośrodku między zębami stojana
(dotyczy to czujnika symetrycznego). Gdy
zęby wirnika zbliżają się do zębów stojana,
dodatnia półfala rośnie, osiągając najwyższą
wartość tuż przed zrównaniem się zębów.
W momencie zrównania się zębów następuje
gwałtowna zmiana biegunowości, a następ-
nie ujemna półfala osiąga najwyższą war-
tość, ale nieco mniejszą od dodatniej ze
względu na prądy wirowe i histerezę magne-
tyczną (rys. 9). Wirnik obraca się dalej, war-
tość ujemna napięcia zbliża się do zera i cykl
się powtarza. „Zmorą” czujnika magnetoin-
dukcyjnego jest duże opóźnienie sygnału
związane właśnie z prądami wirowymi i hi-
sterezą obwodów magnetycznych czujnika
wykonanych przeważnie z litej stali.
Opóźnienie również jest nieliniowe, osiąga-
jąc największe przyrosty przy mniejszych
obrotach, dochodzące do 2-3
o
przy 3000
obr./min. czujnika. Opóźnienie to jest kom-
pensowane odpowiednio większym kątem
regulatora odśrodkowego. I tu istotne jest,
aby sam moduł nie wprowadzał dużego
opóźnienia, co nie zawsze jest spełnione
(tabela 3, rysunek 10).
Do sterowania modułu wykorzystuje się
tylko dwa momenty napięcia czujnika:
1. Gdy napięcie rośnie od zera i osiągnie
0,3-0,4V, wtedy układ elektroniczny włą-
cza prąd cewki.
2. Gdy napięcie gwałtownie spada przy
zmianie biegunowości, prąd cewki (Im)
wyłącza się wtedy, kiedy napięcie spadnie
do 0,1-0,25V tuż przed osiągnięciem zera.
Czytelnicy już na pewno domyślają się, że
zbudowanie modułu do takiego czujnika nie
będzie trudne, wystarczy na wejściu kompa-
rator z histerezą, który będzie sterował stop-
niem mocy z ogranicznikiem prądu. Automa-
tyka samowyłączająca Im będzie zbędna, bo
nieruchomy czujnik nie wysterowuje modułu
i prąd Im nie płynie. Czy warto taki moduł
budować, skoro można kupić gotowe za oko-
ło 50zł? Ja myślę, że warto, choćby dlatego,
że najczęściej spotykane moduły firmowe są
zbudowane na bazie układu scalonego
MC3334P, który jest jednocześnie regulato-
rem kąta zwarcia. Kostka ta jest dość awaryj-
na, bo 99% modułów typu APE05, H161 by-
ło uszkodzonych właśnie z powodu tego
układu. Dodatkowo moduły te mają bardzo
duże opóźnienie z powodu niedopracowania
układu aplikacyjnego tej kostki, a konkretnie
rezystor wejściowy (równoległy do czujnika)
powinien mieć ponad 30k
Ω, aby moduł nie
wprowadzał tak dużego opóźnienia (rys. 10),
tymczasem rezystor napylany na ceramice
ma tylko 6-8k
Ω, co powoduje pobór więk-
szego prądu z czujnika i wzrost opóźnienia.
31
Podstawy
Elektronika dla Wszystkich
Rys. 9. Czujnik magnetoindukcyjny
Tabela 3 Opóźnienie niektórych
modułów wraz z czujnikiem
magnetoindukcyjnym
Rys. 10 Opóźnienie sygnału wnoszo-
ne przez czujnik magnetoinduk-
cyjny wraz z modułem zapłono-
wym

Na upartego rezystor ten można „wyskrobać”
i wlutować zwykły 30-33k
Ω bezpośrednio na
punkty podłączenia przewodów wejścio-
wych. Jeśli wykorzystamy lepszy moduł, to
ten oryginalny może służyć jako zapasowy,
co powinno być regułą, jeśli wyruszamy
w dalszą drogę. Teraz już przestałem się dzi-
wić, gdy słyszę rozmowy użytkowników,
że po zmianie układu klasycznego na elektro-
niczny (produkcji krajowej) samochód zrobił
się „mulasty” i więcej pali. Nic dziwnego,
skoro ma zamontowany „taki” moduł! Nowy
moduł można wykonać w obudowie modułu
uszkodzonego lub innej, mającej jednocze-
śnie cechy radiatora. Schemat jest przedsta-
wiony na rysunku 11, a zasada pracy jest na-
stępująca: gdy prędkość obrotowa czujnika
osiągnie ok. 15 obr./min. a dodatnia półfala
napięcia wejściowego (rosnącego) ok. 0,3V,
przez rezystor R1 i R2 zostaje wysterowany
komparator, ustawiony rezystorem R4 na ta-
ką właśnie czułość. Ponieważ napięcie wej-
ściowe podawane jest na wejście odwracają-
ce, to stan na wyjściu zmieni się na niski
(prawie 0 w kostce LM358) i zatkany zosta-
nie tranzystor T1. Wówczas przez R9 zostaje
wysterowany tranzystor mocy (darlington
BU931ZP) i popłynie prąd cewki zapłonowej
Im. Prąd ten płynie do momentu, gdy zęby
wirnika i stojana zrównają się i napięcie spa-
dnie do ok. 0,16V.
Wtedy komparator
się przełączy, na
wyjściu będzie stan
wysoki, tranzystor
T1 zostaje wystero-
wany przez rezystor
R7 i przechodząc
w nasycenie, bloku-
je tranzystor mocy.
Zanik prądu Im
oczywiście spowo-
duje wyładowanie
iskrowe. Wartość
histerezy można ko-
rygować rezysto-
rem R6, a czułość
R4. Ogranicznik
prądu był już opisy-
wany w poprzednim układzie, ale
tu może być też zastosowana pro-
stsza wersja bez diody Schott-
ky’ego. Kąt zwarcia przy małych obrotach
jest mniejszy, a ze wzrostem obrotów czas
włączenia cewki rośnie, zbliżając się do 50%
(rys. 9c), czyli do 45
o
w 90
o
kącie podziału.
Nietrudno odgadnąć, że cewka 4226 będzie
pasowała „w sam raz”. Zestrojenie modułu
przeprowadzamy w układzie jak na rysunku
12b. Zanim włączymy zasilanie, ustawiamy
rezystor nastawny na najniższe napięcie, naj-
lepiej na 0V. Włączamy zasilanie 12V, jeśli
jest akumulator to powinien być naładowany.
Amperomierz włączony w dodatni przewód
zasilający powinien wskazywać kilkadziesiąt
mA prądu spoczynkowego, zależnego głów-
nie od wartości rezystora R9. Zwiększamy
powoli napięcie wejściowe modułu, obser-
wując woltomierz. Po osiągnięciu napięcia
0,28-0,3V powinien popłynąć prąd Im wska-
zywany przez amperomierz włączony w do-
datni przewód zasilania. Dla cewki 4226
prąd ten powinien wynosić 5,2-5,6A i można
go dobrać rezystorem R11 lub R13. Pokręca-
my jeszcze rezystorem przy wejściu modułu
w celu uzyskania pełnego napięcia ogniwa,
a następnie obniżamy, obserwując ampero-
mierz, kiedy wyłączy się prąd cewki, a po-
winno to nastąpić w momencie, gdy napięcie
wejścia wynosi 0,15-0,16V. Z tego wynika,
że histereza wyniesie 0,3-0,16=0,14V i moż-
na ją zwiększać zmniejszając wartość rezy-
stora R6 i każdorazowo zestroić napięcie za-
łączenia modułu rezystorem R4. Na cewce
powinien być ustawiony iskiernik z drutu
z przerwą ok. 12 mm z gniazda wysokiego
napięcia do zacisku 16 (+). W momencie za-
niku prądu Im powinno występować „czyste”
wyładowanie iskrowe (bez „bzykania”).
32
Podstawy
Elektronika dla Wszystkich
Wykaz elementów modułu elektronicz-
nego do sterowania czujnikiem magne-
toindukcyjnym (patrz rysunek 11)
R1,R3 . . . . . . . . . . . . . . . . . . . . . . .20kΩ
R2 . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R4 . . . . . . . . . . . . . . . . .47kΩ (dobierany)
R5,R8 . . . . . . . . . . . . . . . . . . . . . . .560Ω
R6 . . . . . . . . . . . . . . . . . . . . . . . . .390kΩ
R7 . . . . . . . . . . . . . . . . . . . . . . . . .5,6kΩ
R9 . . . . . . . . . . . . . . . . . . . . . .330Ω/1W
R10 . . . . . . . . . . . . . . . . . . . . . . . .470Ω
R11 . . . . . . . . . . . . . . .6,8kΩ (dobierany)
R12 . . . . . . . . . . . . . . . . . . . . . . . . .33Ω
R13 . . . . . . . . . . . . . .ok. 0,075Ω drutowy
C1 . . . . . . . . . . . . . . . . . . . . . . . . .470pF
C2,C4 . . . . . . . . . . . . . . . . . .100nF/100V
C3 . . . . . . . . . . . . . . . .470nF...1µF/250V
US1 . . . . . . . . . . . . . . . . . . . . . . . .LM358
D1 . . . . . . . . . . . . . . . .DZ 15V/ 0,4W-1W
D2 . . . . . . . . . . . . . . . .DZ 7,5V/0,4W-1W
D3 . . . . . . . . . . . . .1N4002...7 lub BA157
D4 . . . . . . . . . . . . . . . . . .BAT 85 (43, 48)
T1,T2 BC337/25...40 lub podobny (β≥250)
T3 . . . . . . . . . . . . . . . . . . . . . . .BU931ZP
Dwużyłowy przewód ekranowany łączący
moduł z czujnikiem - z ekranem połączonym
z masą przy czujniku.
Rys. 11 Schemat modułu elektronicznego do
sterowania czujnikiem magnetoindukcyj-
nym
Rys. 12
Tabela 4 Prąd średni (w amperach)
pobierany przez moduły przy róż-
nych obrotach czujnika
Tabela 5 Parametry statyczne nie-
których najczęściej spotykanych
w kraju modułów
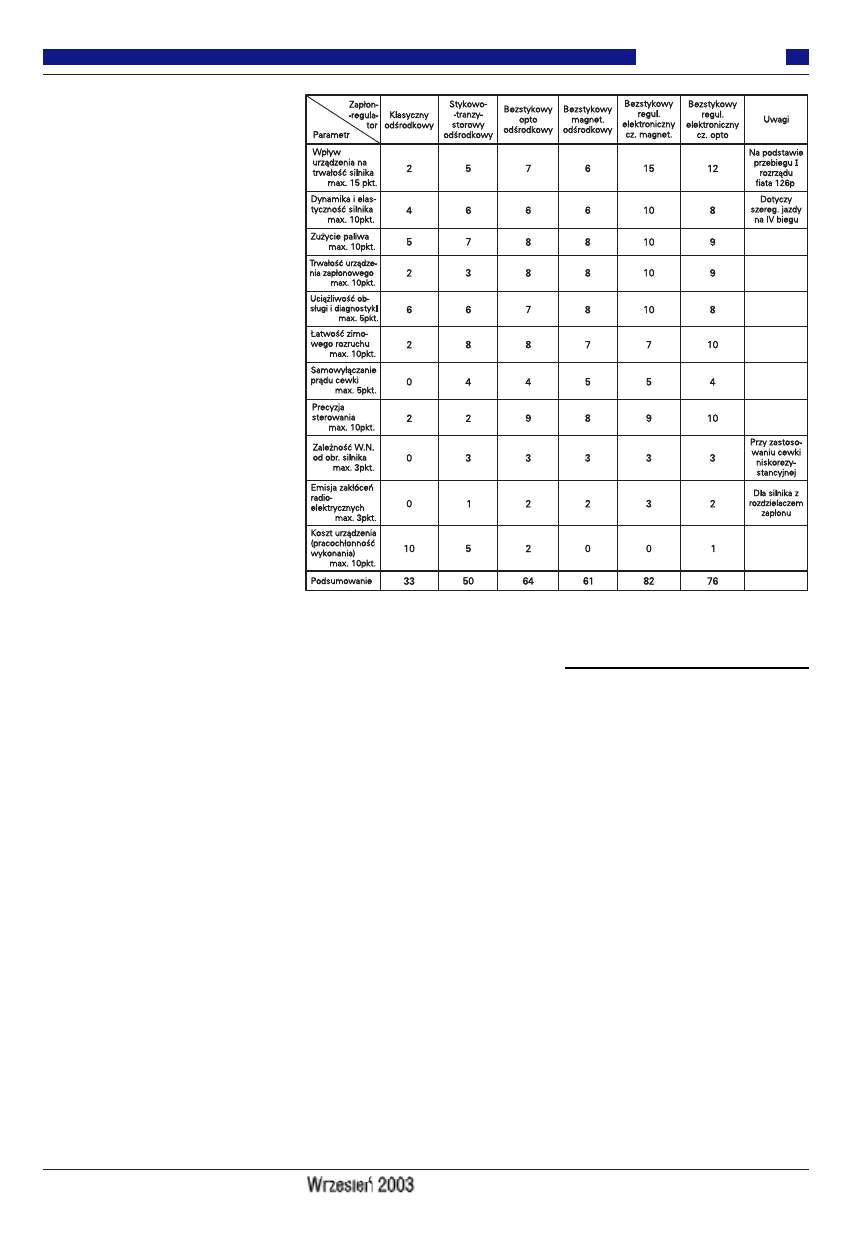
W taki sposób można sprawdzać inne fa-
bryczne moduły, przystosowane do czujnika
magnetoindukcyjnego. Sprawdzenie dyna-
miczne polega na dołączeniu czujnika i napę-
dzaniu np. wiertarką lub dołączeniu na wej-
ście napięcia przemiennego 5-8 V z transfor-
matorka małej mocy. Testy modułów róż-
nych typów przedstawiają tabele 3, 4, 5. Tu
również obowiązuje zasada, że nie dotykamy
zacisku cewki zapłonowej niedołączonego
do plusa zasilania, bo w momencie iskry jest
napięcie 400V.
Pozostaje jeszcze ustalenie biegunowości
czujnika, ale jest to sprawa umowna, ponie-
waż czujnik wytwarza napięcie przemienne
i ważne jest, aby dodatnia półfala występo-
wała przed zrównaniem zębów. Jeśli czujnik
jest podłączony do modułu, to ustawiamy go
tak, aby zęby wirnika i stojana zrównały się,
a następnie pokręcamy w dowolną stronę
o ok. 30
o
. Jeśli nie nastąpi wyładowanie
iskrowe, to połączenie jest prawidłowe
i oznaczamy zaciski czujnika zgodnie z ozna-
czeniami na module. Spotykane są różne sy-
stemy oznaczeń: G-W, A-B, K1-K2 oraz „+”
i „-”. Ustalenia biegunowości czujnika moż-
na też dokonać bez dołączania do modułu za-
płonowego, a za pomocą woltomierza analo-
gowego na zakresie 0,3 lub 1V. Tak jak po-
przednio ustawiamy zęby w jednej linii
i energicznie pokręcamy o ok. 30
o
w dowol-
ną stronę. Jeśli wskazówka wychyli się do ty-
łu, to plus czujnika będzie ten, gdzie dołączo-
ny jest plus miernika. Plus wejścia modułu
będzie tam, gdzie dołączony jest rezystor R1,
a minus połączony z masą, ale w modułach
firmowych minus czujnika nie zawsze jest
połączony z masą, a najczęściej na tzw. na-
pięciu odniesienia, wykorzystywanym do re-
gulacji kąta zwarcia w module. W module tu
opisanym nie ma regulacji kąta zwarcia,
gdyż nie ma takiej potrzeby, bowiem spadek
wysokiego napięcia występuje minimalnie
dopiero powyżej 5500 obr. silnika, a przy
okazji moduł pobiera średnio mniejszy prąd
niż moduły z regulacją z (patrz tabela 4).
Przy szukaniu niesprawności w układach
produkcji krajowej stwierdziłem, że często
pękają przewody tuż przy dołączeniu do
cewki czujnika, wystarczy wtedy dołączyć
omomierz i poruszać przewodami.
Dla zainteresowanych chciałbym jeszcze
podać schemat aplikacyjny kostki
MC3334P (rysunek 12a), często stosowanej
w modułach przeznaczonych do czujników
magnetoindukcyjnych.
Często spotkanym czujnikiem bezstyko-
wym jest scalony czujnik Halla, zawierający
hallotron oraz wzmacniacz z histerezą. Na-
pięcie wyjściowe ma kształt prostokątny
o wartościach skrajnych zbliżonych do
„szyn” zasilających, a opóźnienie duże, zbli-
żone do czujnika magnetoindukcyjnego.
W module oprócz typowego stopnia mocy
z ogranicznikiem prądu i automatyką samo-
wyłączania Im znajduje się człon zmniejsza-
jący kąt zwarcia przy małych obrotach.
Systemy z czujnikiem Halla spotykamy
w Ładach Samarach, Tawriach oraz nie-
których modelach Volkswagena. Ustawienia
zapłonu w samochodzie dokonujemy zgo-
dnie z zaleceniami fabrycznymi, ale jeśli ich
nie ma, to stosujemy następującą zasadę:
1. Ustawiamy kąt wstępny 10
o
przed ZZ dla
silników o stopniu sprężania
≥9, oraz
5-7
o
dla silników o stopniu sprężania
większym od 9.
2. W układzie stykowym lub stykowo-tran-
zystorowym przy podanym kącie przed
ZZ powinno następować przerwanie ob-
wodu styków. Można to sprawdzić omo-
mierzem lub żarówką włączoną w sze-
reg z przerywaczem lub zamiast cewki
zapłonowej w układzie stykowo-tranzy-
storowym. Jeśli są spore luzy mechani-
zmów w aparacie, lepsze będzie ustawie-
nie dynamiczne za pomocą lampy stro-
boskopowej.
3. W układzie z czujnikiem optoelektronicz-
nym przy podanym kącie przed ZZ, prze-
słona powinna w tym momencie „wycho-
dzić” z osi symetrii fotoelementów. Mo-
ment jest bardzo precyzyjny i najlepiej
ustawić włączając zamiast cewki zapłono-
wej dowolną żarówkę 12V lub dynamicz-
nie za pomocą lampy stroboskopowej.
4. Czujnik magnetoindukcyjny ustawiamy
(przez obrót aparatu) tak, aby przy poda-
nym kącie statycznym następowało zrów-
nanie się zębów wirnika i stojana.
We wszystkich układach z rozdzielaczem
zapłonu moment występowania iskry musi
być zgodny z położeniem palca rozdzielacza
odpowiedniego cylindra. Przy zauważeniu
dużych luzów skrętnych zazębienia wałka
aparatu, miarodajne powinno być ustawienie
go w pozycji cofniętej do oporu.
Na podstawie omówionych układów moż-
na ułożyć tabelę porównawczą (punktując
wg parametrów uznanych jako mniej lub bar-
dziej znaczące), patrz tabela 6.
Lepsze parametry silnika oraz mniejszy
zakres obsługi można osiągnąć budując urzą-
dzenie z elektronicznym regulatorem punktu
zapłonu. Mam opracowane i przetestowane
w kilkunastoletniej eksploatacji takie urzą-
dzenia. Gdybyście byli zainteresowani, pi-
szcie listy, a ja chętnie je opublikuję, oczywi-
ście z pomocą Redakcji EdW.
Piszcie również wtedy, gdy będziecie
mieli uwagi lub pytania dotyczące opisanego
tematu.
Stefan Roguski
33
Podstawy
Elektronika dla Wszystkich
Tabela 6 Porównanie różnych wersji
urządzeń zapłonowych według
wartości istotnych parametrów
34
Szkoła Konstruktorów
Elektronika dla Wszystkich
Rozwiązanie zadania powinno zawierać schemat elektryczny i zwięzły opis działania.
Model i schematy montażowe nie są wymagane, ale przysłanie działającego modelu
lub jego fotografii zwiększa szansę na nagrodę.
Ponieważ rozwiązania nadsyłają Czytelnicy o różnym stopniu zaawansowania,
mile widziane jest podanie swego wieku.
Ewentualne listy do redakcji czy spostrzeżenia do erraty powinny być umieszczone
na oddzielnych kartkach, również opatrzonych nazwiskiem i pełnym adresem.
Prace należy nadsyłać w terminie 45 dni od ukazania się numeru EdW
(w przypadku prenumeratorów – od otrzymania pisma pocztą).
S
S
z
z
k
k
o
o
ł
ł
a
a
K
K
o
o
n
n
s
s
t
t
r
r
u
u
k
k
t
t
o
o
r
r
ó
ó
w
w
Na wrzesień proponuję temat, w którym każ-
dy z Was będzie mógł sprawdzić swoją po-
mysłowość, ewentualnie też solidność wyko-
nania modelu.
Oto temat zadania:
Zaprojektować układ pełniący rolę
edukacyjną
Pomysł adresowany jest nie tylko do
uczniów, ale też studentów, którzy wracają
do nauki w październiku. Znów macie wyjąt-
kowo szerokie pole do popisu. Przypu-
szczam, że większość uczestników zdecydu-
je się na zaprojektowanie układu mającego
związek z nauką elektroniki. Ale ja nie ogra-
niczam zakresu prac – nie zapomnijcie o na-
uce innych przedmiotów. Wiadomo, że ist-
nieje mnóstwo programów edukacyjnych na
komputer PC. Pomyślcie, co interesującego
mógłby wnieść praktykujący elektronik na
zajęcia niedotyczące elektroniki.
Oczywiście w grę wchodzą prościutkie
plansze i układy, ilustrujące działanie ele-
mentów i układów elektronicznych. A może
ktoś pokusi się o opracowanie czegoś bar-
dziej oryginalnego, na przykład współpracu-
jącej z programem przystawki do komputera,
sterowanej przez port LPT, by w układzie tej
przystawki naocznie można było przekonać
się o działaniu elementów czy układów.
Jestem pewien, że zaproponujecie mnóst-
wo innych interesujących pomysłów. Naj-
ważniejszy jest właśnie świeży, oryginalny
pomysł, dlatego proponuję, żebyście staran-
nie przemyśleli różne możliwości, zanim za-
bierzecie się za ewentualny model.
Proponuję, żebyście nie „rżnęli żywcem”
wcześniejszych opracowań, z którymi za-
pewne macie kontakt w szkole. Taki plagiat
szybko wyjdzie na jaw. Niech Wasz projekt
będzie prostszy, a za to oryginalny. Cieszył-
bym się też, gdybyście opisali mi znane
Wam niecodzienne rozwiązania już wcześ-
niej zrealizowane przez innych – wyraźnie
zaznaczcie, iż nie są to Wasze pomysły. Za
takie informacje też można będzie otrzymać
upominek, a innym przydadzą się jako
źródło inspiracji.
Nadesłane rozwiązania i pomysły staną
się bowiem podstawą kolejnych opracowań,
jak to bywa także w przypadku innych zadań
Szkoły. Dla tych z Was, którzy są uczniami
i studentami, takie zadanie to znakomita oka-
zja, by zabłysnąć swoim pomysłem i popra-
wić stopnie. Oczywiście nieco bardziej roz-
budowany projekt to znakomity temat pracy
dyplomowej. Możecie więc śmiało konsulto-
wać temat zadania z nauczycielami.
Szczerze mówiąc, liczę głównie na prost-
sze urządzenia. Ale może ktoś chciałby przed-
stawić choćby tylko założenia do serii ukła-
dów lub plansz, będących systemem np. do
nauki podstaw elektroniki. W związku z tym
już teraz informuję, że za dobre propozycje te-
oretyczne będzie można otrzymać nagrody
i punkty jak za modele. Decydować będzie
oryginalność i praktyczna przydatność Wa-
szych układów. Do udziału zapraszam więc
zarówno starszych Czytelników, jak i tych
młodych, którzy sami się dopiero uczą i praw-
dopodobnie najlepiej wiedzą, czego im brak.
Jak zawsze jestem przekonany, że nade-
ślecie interesujące pomysły, rozwiązania
i układy. Stale czekam też na propozycje ko-
lejnych tematów. Przypominam, że pomysło-
dawcy wykorzystanych zadań otrzymują na-
grody.
Zadanie nr 91
Temat zadania 87 brzmiał: Zaprojektować
system czujnika i sterownika silnika elek-
trycznego do maszyny kruszącej.
Znaczna część uczestników podzieliła
mój pogląd, że zadanie było wyjątkowe
i specyficzne. Jeden z uczestników napisał
nawet: Temat Szkoły Konstruktorów ogłoszo-
ny w maju 2003 był nietypowy, a sama „ma-
szyna krusząca”, miażdżąca z ogromną siłą
skały, wiała grozą na każdego elektronika.
Nie sprawdziły się jednak obawy, że zlekce-
ważycie taki „wiejący grozą” temat – nade-
szły liczne odpowiedzi, zarówno teoretycz-
ne, jak i praktyczne. Niektórzy uznali zada-
nie za wyjątkowo ciekawe, bo wzięte z życia.
Szczególnie cieszę się z nadesłanych modeli.
Co ciekawe, prace nadesłało też kilku no-
wych uczestników właśnie ze względu na
specyficzny temat.
Rozwiązania teoretyczne
Dariusz Drelicharz z Przemyśla przysłał
schemat pokazany na rysunku 1. W liście
napisał: (...) na początku byłem zmuszony do-
powiedzieć sobie kilka założeń (nie wiem czy
słusznych):
1. Maszyna krusząca ma pewien bezwład
i zatrzymuje się w chwilę po wyłączeniu, ro-
biąc łopatami jeszcze pewien ruch, ale za-
wsze w miarę równy.
2. Nie jest to maszyna precyzyjna, gdzie
Rozwiązanie zadania nr 87
35
Szkoła Konstruktorów
Elektronika dla Wszystkich
wymagana jest duża dokładność w ustawie-
niu łopat.
(...) W roli elementu czujnika położenia
łopat może zostać zastosowana rurka kontak-
tronu. Gdzieś na obracających się łopatach
powinien zostać zamontowany magnes, który
zwierałby styki kontaktronu. Kontaktron po-
winien być zamontowany w takim miejscu,
aby po przyciśnięciu przycisku STOP łopaty
zatrzymały się w dogodnym położeniu (...).
Po przyciśnięciu mikrostyku S1 układ prze-
chodzi w stan czuwania. Zwarcie przez ma-
gnes styków kontaktronu S2 spowoduje zmia-
nę stanów logicznych w przerzutniku RS
(U1B, U1C) i wygenerowanie krótkiego
ujemnego impulsu na wyjściu bramki U1D,
który jest podłączony do przycisku mające-
go wyłączyć silnik. Kondensator C1 zapewnia
reset przerzutnika po włączeniu zasilania
układu.
Szymon Janek z Lublina zaproponował
wykorzystanie łącza laserowego w roli czuj-
nika. Do tego zaproponował dość skompliko-
wany układ elektroniczny z pięcioma układa-
mi scalonymi CMOS (Janek.gif). Szymon
chce przez pewien czas cyklicznie włączać
i wyłączać silnik – taka idea w przypadku po-
tężnego silnika trójfazowego jest jednak co
najmniej ryzykowna.
Tylko trochę mniej skomplikowany układ
zaproponował Rafał Kobylecki z Czarnowa
(Kobylecki.gif). Rafał przewidział nawet re-
gulację mocy silnika w końcowej fazie cy-
klu, zakładając, że jest to jednofazowy silnik
uniwersalny. Odrzucił pomysł czujnika
optycznego (laserowego) ze względu na duże
zapylenie i zdecydował się na fabryczny in-
dukcyjny czujnik zbliżeniowy.
Czujnik laserowy (właściwie dwa, połą-
czone równolegle, wykrywające obroty silni-
ka) chce też zastosować 13-letni Marcin Pa-
zdro z Borowej. W swoim układzie (Pa-
zdro.gif) chce zastosować oddzielne sterowa-
nie silnika i hamulca. Po wyłączeniu silnika
i wykonaniu przezeń określonej liczby obro-
tów (1...9) następowałoby włączenie hamulca.
Choć w układzie można się dopatrzyć kilku
błędów, najmłodszy uczestnik otrzyma drobny
upominek jako zachętę do dalszych prac.
Jarosław Tarnawa z Godziszki w nieco-
dzienny sposób chce rozwiązać problem nie-
zawodności czujników typu magnes-kontak-
tron. Warto przeanalizować propozycję Ja-
rosława, który zamiast jednego, proponuje
zastosować trzy czujniki, które powinny
działać jednocześnie. Oryginalny układ
pokazany jest na rysunku 2. Do uzyskania
stanu wysokiego na wyjściu układu
US1A potrzeba, by zadziałały przynaj-
mniej dwa kontaktrony spośród K1, K2,
K3 (trzeci może być uszkodzony). Pomysł
taki jest niewątpliwe interesujący, jednak
warto byłoby dodać obwód sygnalizujący,
że jeden czujnik jest uszkodzony – wystar-
czy sprawdzać napięcie na R4 i R8.
Mariusz Chilmon z Augustowa nade-
słał prościutki schemat, pokazany na ry-
sunku 3. Przycisk ON ustawia oba prze-
rzutniki. Natomiast naciśnięcie przycisku
OFF resetuje tylko pierwszy przerzutnik.
Drugi zostanie zre-
setowany dopiero
po zwarciu styku
kontaktronu przez
magnes zamocowa-
ny na wale maszy-
ny. Mariusz ze
względu na za-
kłócenia słusznie
zaproponował re-
zystory o stosunko-
wo małej wartości
10k
Ω, niemniej
warto dodać na
trzech współpracu-
jących ze stykami
wejściach dodatkowe
obwody filtrujące
RC.
Rozwiązanie za-
dania nadesłał także
40-letni Maciej Ka-
miński z Kędzierzy-
na-Koźla, który bę-
dąc elektromechani-
kiem korzysta z ama-
torskiej wiedzy elek-
tronicznej w swej pracy zawodowej. Mając
na co dzień do czynienia z automatyką zde-
cydowanie odrzucił inne czujniki na rzecz fa-
brycznych indukcyjnych czujników zbliże-
niowych. Proponuje wykorzystanie dwóch
takich czujników. Jeden sygnalizowałby tyl-
ko zaświeceniem zielonej lampki właściwe
położenie końcowe wału. Drugi powodował-
by wyłączenie silnika. Maciej proponuje pro-
sty układ według rysunku 4. Oto fragmenty
listu: (...) Na wale reduktora z łopatami nale-
ży wkręcić lub wspawać na stałe bolec, który
spowoduje zadziałanie czujnika, gdy łopaty
będą poziomo. Bolec dla drugiego czujnika
należy zamontować na jarzmie według ry-
sunku 5, co pozwoli na regulację (przy zuży-
waniu się mechanicznym przekładni i silnika
w dłuższym okresie wybieg maszyny będzie
się zmieniał). (...) Po naciśnięciu przycisku
STOP operator musi go przytrzymać taką
chwilę, aż bolec ustalający wyzwoli zbliże-
niówkę. Oba sygnały podane na wejścia
bramki AND wysterują tranzystor, a włączony
przekaźnik swymi biernymi stykami wyłączy
stycznik silnika głównego. (...) Załączenie
Rys. 1
Rys. 2
Rys. 3
Rys. 4
Rys. 5
36
Szkoła Konstruktorów
Elektronika dla Wszystkich
maszyny następuje przez naciśnięcie przycisku
START i stycznik zostanie podtrzymany przez
wewnętrzne styki. Operator maszyny na bie-
żąco może kontrolować jej pracę (mrugają
oba LED-y). (...) Fabryczne układy tego typu
są skomplikowane, ale również wykorzystują
zbliżeniówki, które przez stopień mocy steru-
ją hamulcem elektromagnetycznym na wale
silnika głównego. (...) Trzymam kciuki za
Pana i Pańskie czasopismo. Wierze, że daje
Pan młodym ludzim dużo frajdy w tak prosty
sposób zachęcając ich do nauki. Mimo że
część projektów Szkoły jest, że tak powiem,
wtórna, cieszę się bardzo, że mamy tak zdol-
ną młodzież.
Bardzo podobny sposób z dwoma czujni-
kami zbliżeniowymi zaproponował Arka-
diusz Biliński ze Środy Śląskiej. Propono-
wany schemat pokazany jest na rysunku 6.
Czujniki pobudza tu jeden bolec, a zależnie
od bezwładności maszyny należy odpowie-
dnio ustawić czujnik wyłączający WK1.
Czujnik WK2 sygnalizuje prawidłową pozy-
cję spoczynkową wału. Oto fragmenty opisu:
Naciśnięcie przycisku S1 zaczyna procedurę
zatrzymywania – silnik napędowy zostanie
wyłączony dopiero po dojściu bolca pobu-
dzającego X do czujnika WK1. Wskutek bez-
władności bolec zbliży się do WK2, co zasy-
gnalizuje lampka L1. W celu zwiększenia do-
kładności zatrzymywania można zastosować
hamulec elektromagnetyczny, najlepiej na
silniku napędowym, wyzwalany przez czujnik
WK2 i załączany tylko na 2...3 sekundy prze-
kaźnikiem czasowym T1. Styki przekaźników
K2 i K3 zostały wpięte do układu załączają-
cego stycznik (K0). Styk przekaźnika K3 za-
pewnia, że silnik może być uruchomiony tyl-
ko wówczas, gdy wał maszyny znajduje się
w prawidłowym położeniu startowym, sygna-
lizowanym lampką L1. Lampka ta w czasie
pracy miga (...). W czasie pracy nie ma moż-
liwości załączenia hamulca przez włączenie
biernego styku pomocniczego stycznika
głównego K0 w obwodzie przekaźnika czaso-
wego T1. Styk bierny przekaźnika T1 zeruje
też układ wyłączający.
Dariusz Minior z Podskala nadesłał trzy
propozycje. Pierwsza to odpowiednio zamo-
cowany prosty wyłącznik krańcowy wyłą-
czający silnik przed osiągnięciem położenia
spoczynkowego.
Kolejny sposób jest modyfikacją poprze-
dniego, a mianowicie gdyby bezwładność by-
ła zbyt duża i wzięcie na nią poprawki nie-
wiele by dało, można by silnik hamować
elektrycznie. Nie polecam przeciwwłączenia
(zmiany kolejności faz), ponieważ mogłoby
się zdarzyć, że wszystko zacznie kręcić się
w przeciwnym kierunku. Lepszym rozwiąza-
niem byłoby hamowanie maszyny asynchro-
nicznej prądem stałym: dwie fazy zwieramy,
następnie do zwartych dwóch faz i pozostałej
podłączamy napięcie stałe uzyskane z pro-
stownika 3-fazowego - można to wszystko
w prosty sposób wpleść w układ stycznika
(musi być 4-torowy). Trzecia propozycja to
wykorzystanie falownika, dostarczającego
do silnika trójfazowego przebiegu o zmien-
nej częstotliwości. Falownik rzeczywiście
pozwoliłby na precyzyjne sterowanie proce-
sem zatrzymywania maszyny, także w przy-
padku zmiennego obciążenia wału, ale wy-
magałby rozbudowanych obwodów sterowa-
nia. Dariusz przysłał schematy falownika
(mostek z 6 tranzystorami IGBT + część ste-
rującą), ale bez obwodów sterowania wyłą-
czaniem według warun-
ków zadania. Schematy
i opis można znaleźć na
naszej stronie interneto-
wej jako Minior.zip. Da-
riusz napisał, że obecnie
pracuje nad takim falow-
nikiem – życzę sukcesu
w tym trudnym zadaniu
i proszę o informację,
gdy falownik powstanie
i będzie praktycznie
przetestowany – chętnie zaprezentowaliby-
śmy taką konstrukcję na łamach czasopisma.
Rozwiązania praktyczne
Michał Koziak z Sosnowca przeanalizował
różne typy czujników, wykonał nawet model
czujnika mechanicznego z kulką i ostatecznie
zdecydował się na czujnik indukcyjny. W liście
napisał: Jedynym sensownym rozwiązaniem
wydaje się być czujnik indukcyjny i właśnie
taki zastosowałem do swojego układu. Nie
chciało mi się wykonywać cewek, więc posta-
nowiłem użyć czegoś gotowego. Wpadłem na
pomysł, by w roli czujnika zastosować głowi-
cę magnetofonową. Zastanawiałem się też
nad samym sposobem zatrzymywania. Można
zrobić układ uwzględniający bezwładność
wału, lecz czasami może się on kręcić jeszcze
dość długo, „ogłupiając” układ sterowania.
Można by zastosować układ hamulca. Hamu-
lec mechaniczny byłby dość skomplikowany
do wykonania, lecz na przykład można by za-
stosować hamowanie indukcyjne za pomocą
silnika napędowego. Jeszcze jednym istotnym
problemem jest to, że w zadaniu nie ma infor-
macji, czy wał zatrzymuje się pod obciąże-
niem czy najpierw wyłączany jest dopływ
kruszywa. Jest to sprawa istotna, gdyż obcią-
żenie sprawi, że wał zatrzyma się szybciej
i w takim przypadku nie wystarczą proste
układy, lecz potrzebne będą dokładne czujni-
ki położenia.
O schemacie z rysunku 7 Michał pisze:
Układ wykonałem na kawałku płytki uniwer-
salnej. (...) Gdy włączymy zasilanie, prze-
rzutniki są resetowane poprzez obwód C3, R5
i silnik nie jest zasilany, gdyż na wyjściu
Q panuje stan niski. Po podaniu sygnału
start na wejście przerzutnik T (U2B) zmienia
swój stan i na wyjściu Q pojawia się stan wy-
soki, który poprzez obwód różniczkujący
ustawia przerzutnik U1A, włączając silnik.
Po ponownym podaniu sygnału na wejście,
na wyjściu U2B pojawia się stan niski, który
jest podawany na wejście D przerzutnika
U2A. Gdy magnes zaindukuje w czujniku na-
pięcie, impuls szpilkowy zostanie podany na
wejście zegarowe U2A i układ wyłączy silnik.
Jako czujnik zastosowałem głowicę magneto-
fonową, z której sygnał podawany jest na ba-
zę T1 (będący na granicy przewodzenia),
który otwierając się, spowoduje pojawienie
Rys. 6
Rys. 7
37
Szkoła Konstruktorów
Elektronika dla Wszystkich
się stanu wysokiego na wyjściu U1C. Obwód
całkujący C2,R3 zabezpiecza przed przypad-
kowym wzbudzeniem układu (...) do wejścia,
które trzeba podciągnąć do plusa zasilania
za pomocą rezystora o wartości kilku kiloo-
mów, należy podpiąć przycisk pomiędzy ma-
sę i wejście. Bramka U1B pełni rolę kontrol-
ki - gdy silnik jest w ruchu, powinna ona mi-
gać. Układ (...) testowałem za pomocą ma-
gnesu przyczepionego do krajalnicy kuchen-
nej. W tych warunkach się sprawdził. Mo-
ment zatrzymania silnika regulujemy poprzez
przesuwanie magnesu.
Bartosz Czerwiec z Mogilna przysłał
model pokazany na fotografii 1. Schemat
i opis można znaleźć na stronie internetowej
jako Czerwiec.zip. W liście Bartosz napisał:
(...) według mnie urządzenie powinno kon-
trolować położenie wału kruszarki i ukazy-
wać je na małym wyświetlaczu. Gdy pracu-
je, łopaty znajdują się w ruchu. Kiedy kon-
troler pracujący przy nim chce zakończyć
proces kruszenia, naciska na przycisk
i urządzenie zatrzymuje się, ale dopiero na
potrzebnej pozycji, którą można bez proble-
mu ustawić tarczą posiadającą kontaktrony.
(...) Urządzenie oparte jest na czujnikach
kontaktronowych umieszczonych na nastaw-
nej plastikowej tarczy, którą należy samemu
zaprojektować.
Michał Stach z Kamionki Małej wykonał
na bazie starego CD-ROM-u sterownik silni-
ka karetki – fotografia 2. Układ wprawdzie
nie spełnia warunków zadania, jednak warto
zapoznać się z rozwiązaniem, do którego ma-
teriały (schemat, opis i płytka) dostępne są na
stronie internetowej jako Stach.zip.
Marcin Wiązania z Buska Zdroju przy-
słał model pokazany na fotografii 3. Propo-
nuje użycie kontaktronów i magnesów, ewen-
tualnie hallotronów. Schemat ideowy pokaza-
ny jest na rysunku 8. Dwa kontaktrony mają
poprawić niezawodność. Dłuższe naciskanie
przycisku STOP ma wyłączyć silnik bez cze-
kania na sygnał z kontaktronu. Działanie
układu jest oczywiste – w miejsce diody D3
należy włączyć przekaźnik sterujący styczni-
kiem silnika. Dioda D4 (lub włączona za-
miast niej syrena) ma sygnalizować awarię.
Warto jednak dokładnie przeanalizować, jaką
niesprawność może sygnalizować taki układ
z jednym tylko czujnikiem, który nie spraw-
dza końcowego ustawienia łopat.
Wydawałoby się, że do zrealizowania po-
stawionego zadania niezbędne są dwa czujni-
ki, z których jeden ma odpowiednio wcze-
śniej wyłączyć silnik, a drugi sprawdzić, czy
wał zatrzymał się w pożądanej pozycji. Piotr
Wójtowicz z Wólki Bodzechowskiej zasko-
czył mnie pomysłem realizującym zadanie za
pomocą jednego tylko czujnika sygnalizują-
cego ustawienie łopat w pożądanej pozycji.
Uzyskując z wału maszyny tylko taką infor-
mację, wprowadził układ opóźniający, który
ma wyłączyć silnik po takim czasie, żeby
końcowe położenie wału było prawidłowe.
Piotr przeprowadzał próby swojego układu
z użyciem gramofonu, którego talerz po wy-
łączeniu wykonywał nie część obrotu,
tylko więcej niż jeden obrót. Oryginalny
schemat układu pokazany jest na rysunku 9,
a model na fotografii 4. Analiza układu nie
powinna sprawić problemu. Na uwagę zasłu-
Fot. 1 Model Bartosza Czerwca
Fot. 2 Sterownik Michała Stacha
Rys. 8
Rys. 9
38
Szkoła Konstruktorów
Elektronika dla Wszystkich
guje obecność wyjścia ALARM, które staje
się aktywne, gdy po zatrzymaniu silnika wał
nie zatrzyma się w prawidłowym położeniu.
Nie kieruję projektu do publikacji ze
względu na spodziewane małe zainteresowa-
nie takim specyficznym wyłącznikiem. Nie-
mniej projekt jest wartościowy i dalsze mate-
riały (opis, płytka) dostępne są na stronie in-
ternetowej jako Wojtowicz.zip.
Na koniec zostawiłem pracę Romana
Biadalskiego z Zielonej Góry. Jego projekt
obejmuje sterownik włącz-wyłącz i induk-
cyjny czujnik położenia. Jak widać na rysun-
ku 10 i fotografii 5, układ sterownika został
zbudowany w oparciu o popularny układ
GAL16V8D. Na stronie internetowej w pliku
Biadalski.zip są: listing, kod wynikowy, spis
elementów i projekt płytki w Autotraksie
W listingu przedstawiony jest krótki opis
źródłowy w języku CUPL. Silnik może zo-
stać włączony tylko w przypadku, kiedy ło-
paty są w pozycji poziomej, a wyłączony od-
powiednio wcześniej, tak by mógł się zatrzy-
mać w pozycji wyjściowej. Pozostałe istotne
tryby to sygnał od przycisku RESET powo-
dujący natychmiastowe wyłączenie silnika
oraz stan niedozwolonego ustawienia łopat
sygnalizujący błąd - ERROR. Praca sterow-
nika taktowana jest sygnałem zegarowym
wytworzonym przez dwa wewnętrzne inwer-
tery, kondensator C2 i rezystor R6.
Roman nadesłał także układ indukcyjnego
czujnika zbliżeniowego, pokazany na foto-
grafii 6. Ponieważ czujnik taki ma interesu-
jącą zasadę pracy, nadaje się nie tylko do
współpracy z przedstawionym sterownikiem,
ale także do wielu innych celów, więc kieru-
ję projekt do Pracowni AVT i do publikacji.
Podsumowanie
Ogólnie biorąc, jestem bardzo zadowolony
z nadesłanych prac. Z przyjemnością skiero-
wałem do publikacji projekt indukcyjnego
czujnika zbliżeniowego. W EdW nie zajmo-
waliśmy się tymi nad wyraz pożytecznymi
elementami z różnych względów, choćby
dlatego, że trudno jest w warunkach amator-
skich uzyskać niezawodność działania i od-
porność na wpływy zewnętrzne porówny-
walną z czujnikami fabrycznymi. Warto jed-
nak przynajmniej przedstawić zasadę działa-
nia tych czujników, ponieważ są powszech-
nie używane w automatyce przemysłowej,
a niektórzy najmłodsi Czytelnicy nawet o ta-
kich czujnikach nie słyszeli.
Indukcyjne czujniki zbliżeniowe reagują
na zbliżenie do nich materiału magnetyczne-
go do czoła czujnika. Co ważne, reagują więc
na elementy stalowe. Odległość działania jest
niewielka, nie są to więc czułe wykrywacze
metalu, tylko niezawodne czujniki reagujące
na zbliżenie stalowego elementu na odle-
głość kilku do kilkunastu, maksimum kilku-
dziesięciu milimetrów. Zasilane są zazwy-
czaj napięciem stałym 10...30V (typowo
24VDC). Dostępne są tzw. czujniki PNP
i NPN, inaczej mówiąc, zwierające do plusa
lub do minusa (nazwa PNP, NPN związana
jest z budową obwodu wyjściowego – często
jest to zwyczajny tranzystor z otwartym ko-
lektorem, jak pokazuje rysunek 11). I rze-
czywiście, takie czujniki ze względu na
spodziewane zapylenie i ryzyko narażeń me-
chanicznych znakomicie nadają się do reali-
zacji postawionego zadania.
A jeśli chodzi o zadanie, to brak szcze-
gółowych informacji o maszynie, jej specyfi-
ce i działaniu spowodował, że trzeba było za-
łożyć, jak ona pracuje. Kluczową sprawą by-
ło zatrzymanie łopat w określonym położeniu
i to było oczywiste. Nie były jednak oczywi-
ste inne szczegóły. Autor zadania nie podał,
jaki silnik napędza kruszarkę. Należy się
spodziewać, że jest to popularny silnik asyn-
chroniczny trójfazowy. Niektórzy przypu-
szczali, że jest to silnik jednofazowy lub sil-
nik prądu stałego, jednak biorąc pod uwagę
przeznaczenie – kruszenie kamieni, należało
raczej przyjąć, iż jest to prosty silnik trójfazo-
wy o dużej mocy. Silnik taki sterowany jest
zapewne zwyczajnym elektromechanicznym
stycznikiem, a nie układem z triakami, tyry-
storami czy falownikiem tranzystorowym.
Kluczową sprawą było jednak pytanie,
czy układ ruchomy ma stałą bezwładność?
Autor zadania napisał, że wał przesuwa
się o kilka centymetrów po wyłączeniu silni-
ka. Można było przypuszczać, że po każdym
wyłączeniu to przesunięcie jest stałe. I takie
Fot. 3 Układ Marcina Wiązani
Fot. 4 Projekt Piotra Wójtowicza
Fot. 6 Czujnik Romana Biadalskiego
Rys. 11
Rys. 10
Fot. 5 Sterownik Romana Biadalskiego
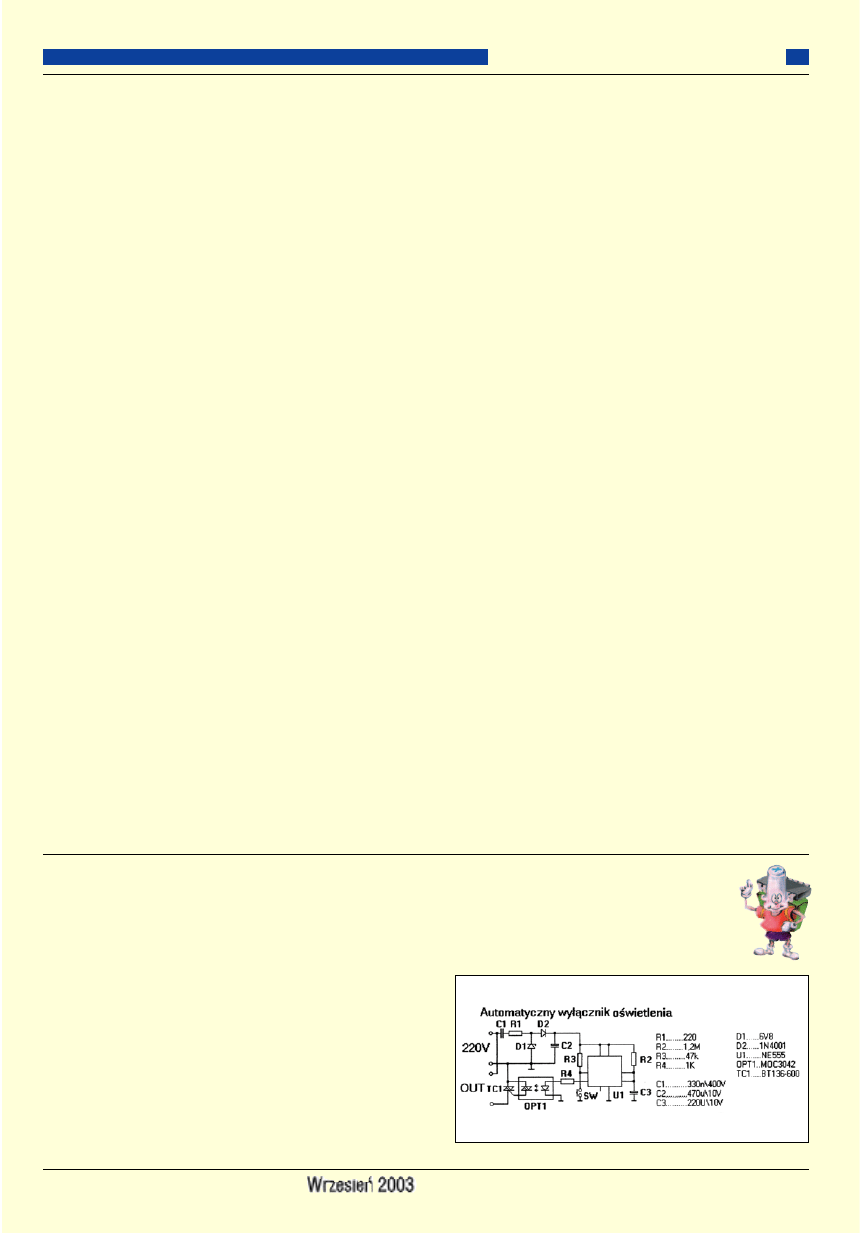
39
Szkoła Konstruktorów
Elektronika dla Wszystkich
założenie, świadomie lub nie, przyjęła zdecy-
dowana większość uczestników. Jeśli tak jest
w rzeczywistości, genialnie upraszcza to za-
danie. W wersji minimalnej wystarczy wtedy
jeden czujnik, który wyłączy silnik odpowie-
dnio wcześniej. Tylko kilka osób wspomnia-
ło o znacznie gorszej możliwości: gdy wyłą-
czana maszyna miałaby różną bezwładność,
zależnie od tego, czy pracując do ostatniej
chwili będzie kruszyć kamienie, czy tuż przed
wyłączeniem będzie pracować „na pusto”.
W takiej sytuacji należałoby zastosować bar-
dziej inteligentny układ, prawdopodobnie
z kilkoma czujnikami, które wykrywałyby
położenie zatrzymującego się wału i w razie
potrzeby dodatkowo hamowały go, żeby
uzyskać stałe położenie końcowe. W takiej
sytuacji potrzebny byłby albo hamulec, albo
silnik musiałby być sterowany w inteligentny
sposób umożliwiający kontrolę mocy i obro-
tów. Gratuluję wszystkim uczestnikom,
którzy wspomnieli o takiej możliwości.
Przy tego typu zadaniu niezmiernie ważna
jest niezawodność. Zwrócił już na to uwagę
młody pomysłodawca zadania. Należy się głę-
boko zastanowić, czy przypadkiem jakieś
uszkodzenie, na przykład awaria czujnika, nie
spowoduje, że maszyny nie będzie można wy-
łączyć. Przecież w zadaniu chodzi o przycisk
i funkcję STOP. We wszelkich tego typu ma-
szynach działanie przycisku stop musi być ab-
solutnie niezawodne. To prawda, że układy
elektroniczne mają dużą niezawodność, jednak
one też mogą się zepsuć. Co wtedy?
Realizując tego typu urządzenie trzeba nie
tylko przewidzieć takie awaryjne sytuacje,
ale też podjąć skuteczne kroki zaradcze. I tu,
powiem szczerze, nie wszystkie propozycje
układowe były jednakowo dobre – sami prze-
analizujcie proponowane rozwiązania pod
tym kątem.
Pomysłodawca zadania nie pisze, jak
wcześnie rozwiązany był problem ustawiania
łopat kruszących. Czy musiał to zrobić ope-
rator, odpowiednio wcześniej wyłączając sil-
nik? Istotne jest wobec tego pytanie, czy no-
wy układ sterujący, zatrzymujący silnik
z opóźnieniem, nie musi mieć jeszcze jedne-
go, awaryjnego wyłącznika STOP, zatrzymu-
jącego natychmiast silnik w przypadku awa-
rii lub nieszczęśliwego wypadku. To napraw-
dę jest ważna kwestia, którą należy wziąć
pod uwagę. Wprawdzie głównym tematem
zadania jest zaprojektowanie układu opóź-
nionego wyłączania, jednak trzeba koniecz-
nie odpowiedzieć na pytanie, czy system nie
musi mieć też awaryjnego wyłącznika na-
tychmiastowego?
Odpowiedź nie wynika z treści postawio-
nego zadania, ale trzeba uwzględnić taką
opcję, bo jest prawdopodobna. Obwodowi
takiego dodatkowego awaryjnego wyłączni-
ka natychmiastowego należałoby poświęcić
uwagę, żeby nie był to jakiś dodatkowy przy-
cisk w układzie elektronicznym, tylko me-
chaniczny wyłącznik, rozłączający niezawo-
dnie i trwale obwód sterowania stycznika.
Część układów była niepotrzebnie roz-
budowana. Po bliższej analizie okazuje się,
że w najprostszym układzie wystarczyłby
jeden czujnik i nie trzeba do tego żadnej
elektroniki...
Autor zadania prosił jednak, żeby układ
zasygnalizował nieprawidłową pozycję łopat
po zatrzymaniu. W takim przypadku jest
miejsce na trochę elektroniki. Sygnalizację
można zrealizować na kilka sposobów. Jed-
nym jest system z dwoma czujnikami i ob-
wodem opóźniającym. Jeden czujnik służył-
by do zatrzymania silnika, drugi sprawdzał-
by, czy łopaty zostały zatrzymane w pożąda-
nej pozycji. Jeśli nie, odzywałby się brzę-
czyk. Układ opóźniający byłby potrzebny po
to, żeby brzęczyk został włączony dopiero po
zatrzymaniu. A może lepszy w praktyce był-
by system bez układu opóźniającego – wtedy
brzęczyk odezwałby się na krótko przy każ-
dym zatrzymaniu silnika sygnalizując, że jest
sprawny i ucichłby, gdy łopaty ustawią się
w prawidłowej pozycji.
Co do podwójnych czujników, połączo-
nych równolegle, sprawa jest dyskusyjna
z uwagi na możliwe rozmaite możliwości
uszkodzenia. Owszem, można zdublować
czujniki, ale wtedy trzeba też odpowiednio
zaprojektować układ, żeby prawidłowo zin-
terpretował sytuację po dowolnego rodzaju
uszkodzeniu jednego z czujników. Jest to
możliwe, ale dość trudne.
Zamiast dublować czujniki, można tak za-
projektować układ, żeby operator od razu to
zauważył – niektóre z proponowanych roz-
wiązań realizują taką skuteczną kontrolę
czujników niejako przy okazji. Gratulacje dla
ich Autorów!
Przykro mi, że nie mogę wszystkich obda-
rować nagrodami i upominkami, niech nagro-
dą będzie przyjemność zaprezentowania swej
pracy ogromnej rzeszy Czytelników EdW.
Nagrodę za zadanie 86 otrzymuje Piotr Wój-
towicz. Upominek, a po publikacji honora-
rium otrzyma Roman Biadalski. Upominki
otrzymają też: Marcin Wiązania, Bartosz
Czerwiec, Michał Koziak, najmłodszy ucze-
stnik Marcin Pazdro oraz najstarsi uczestni-
cy, autorzy najprostszych rozwiązań prak-
tycznych: Maciej Kamiński i Arkadiusz Bi-
liński. Aktualna punktacja zawarta jest w ta-
beli. Ponawiam prośbę: jeśli nadsyłacie pracę
do Szkoły e-mailem, podawajcie od razu swój
adres pocztowy, a przynajmniej miejscowość
zamieszkania. Serdecznie zapraszam do
udziału w rozwiązywaniu kolejnych zadań
i do nadsyłania prac w terminie.
Wasz Instruktor
Piotr Górecki
C
C
o
o
t
t
u
u
n
n
i
i
e
e
g
g
r
r
a
a
?
?
- Szkoła KKonstruktorów klasa III
Rozwiązanie zadania 87
W EdW 5/2003 na stronie 37 zamieszczony
był schemat czasowego wyłącznika oświetla-
nia garażu z kostką 555, optotriakiem i zasi-
laczem beztransformatorowym, nadesłany
jako rozwiązanie jednego z poprzednich za-
dań. Oryginalny schemat pokazany jest na
rysunku A. Autor napisał: Układ jest usta-
wiony tak, żeby czas, w którym światło będzie
włączane, wynosił 5-6min., lecz można go
zmieniać w szerokich granicach za pomocą
rezystora R2 i/lub kon-
densatora C3. W ukła-
dzie zastosowałem kla-
syczną aplikację układu
NE555 oraz bardzo pro-
sty zasilacz beztransfor-
matorowy, gwarantujący
niezawodność oraz niski
koszt wykonania.
Niewątpliwą wska-
zówką ułatwiającą rozwią-
A
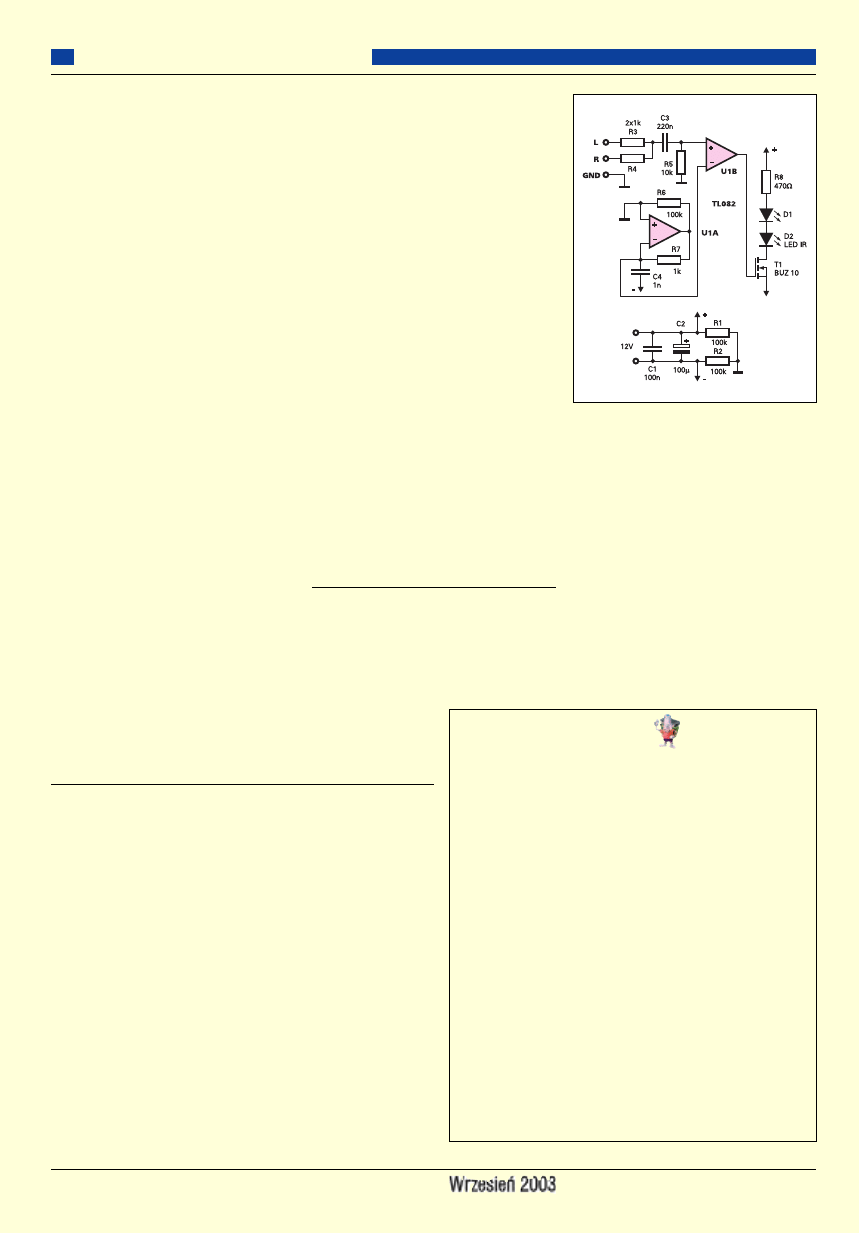
40
Szkoła Konstruktorów
Elektronika dla Wszystkich
zanie zadania była wzmianka, iż przycisk SW
to zwykły microswitch umieszczony gdziekol-
wiek, w dogodnym, łatwo dostępnym miejscu.
I to jest jedyny, ale za to kardynalny błąd:
w garażu miałby być wykorzystany zasi-
lacz beztransformatorowy, a byle jak
umieszczony microswitch stanowiłby po-
ważne zagrożenie życia! Takie rozwiązanie
jest absolutnie niedopuszczalne!
Niestety, część uczestników nie zauważy-
ła tego błędu. Utwierdza mnie to w przekona-
niu, że takie zadanie było bardzo potrzebne.
Pamiętajcie: z prądem elektrycznym
nie ma żartów. Jeden drobny na pozór
błąd konstruktora-amatora może kogoś
kosztować życie. Zasilacze beztransformato-
rowe mają swoje zalety, jednak przy ich sto-
sowaniu należy zachować daleko idące środ-
ki bezpieczeństwa.
Gratuluję wszystkim uczestnikom, którzy
zauważyli ten błąd. Oto treść jednego z e-
maili: Witam! Pierwszy raz biorę udział
w drugiej klasie Szkoły. Zachęciło mnie do
tego to, iż to mój układ został przedstawiony
w tymże zadaniu. (...) Zastrzeżenia wzbudził
zapewne microswitch. W egzemplarzu wysła-
nym do Redakcji zastosowałem przycisk,
który w żadnym wypadku nie może pracować
w tych warunkach, gdyż mógłby doprowadzić
do porażenia. U mnie na klatce pracuje inny
egzemplarz, a tam wyłącznikami są zwykle
ścienne wyłączniki podtynkowe. Nie wiem,
czy pisałem, że jest to tylko prototyp, ale nie-
ważne, i tak biję się w pierś, gdyż bezpieczeń-
stwo użytkowania jakichkolwiek układów jest
sprawą bardzo istotną.
Bardzo mnie ucieszyło, iż trafną odpo-
wiedź nadesłał też Autor schematu. I mam
nadzieję, że zadanie to wyczuli Was na pro-
blem bezpieczeństwa.
Z obowiązku wspomnę też o innych wa-
szych uwagach. Nie jest błędem zastosowa-
nie w zasilaczu nietypowo włączonej diody
Zenera – kto ma wątpliwości, niech starannie
przeanalizuje, jak ta dioda pracuje przy obu
połówkach napięcia sieci. Słusznie zwracali-
ście natomiast uwagę na małą wydajność
prądową zasilacza. Rzeczywiście, choć we-
dług zapewnień Autora układ działa, jednak
w urządzeniu, które miałoby być wykonane
w kilku egzemplarzach należałoby zwięk-
szyć wydajność zasilacza. Chodzi o to, że ko-
stka 555 pobiera znaczny prąd, a gwaranto-
wany prąd otwierania optotriaka MOC3042
wynosi 10mA. Z niektórymi egzemplarzami
tych elementów układ może po prostu nie za-
działać. Niektórzy słusznie postulowali wy-
korzystanie kostki 555 w wersji CMOS,
czulszego optotriaka MOC3043 o prądzie
gwarantowanym 5mA i zwiększenie R4. Inni
proponują zastosowanie prostownika dwupo-
łówkowego. Wielu uczestników zwróciło też
uwagę na brak kondensatora dołączonego do
nóżki 5 – nie jest to jednak istotna usterka.
Niektórzy za wadę uznali brak możliwości
przedłużenia czasu świecenia. Wytknęliście
też brak rezystora(-ów) rozładowującego,
równoległego do C1, spotykanego w więk-
szości podobnych układów.
Nagrody otrzymują: Kamil Kozłowski -
Gdańsk, Michał Koziak - Sosnowiec, Kon-
rad Wesołowski - Poddębie.
Zadanie 91
Na rysunku B pokazany jest schemat nadajni-
ka podczerwieni do toru audio, nadesłany jako
rozwiązanie jednego z poprzednich zadań
Szkoły. Autor napisał:
jakość dźwięku pozo-
stawia wiele do życze-
nia. Najciekawszy pro-
blem jaki napotkałem:
(...) przy pewnej odle-
głości między nadajni-
kiem a odbiornikiem pojawiają się swego ro-
dzaju oscylacje: co chwilę głos jest to cichszy,
to głośniejszy. Zauważyłem związek częstotli-
wości tej modulacji z pojemnością C4 (...).
Jak zwykle pytanie brzmi:
Co tu nie gra?
Proszę o możliwie krótkie odpowiedzi.
Czy idea jest błędna, czy tylko chodzi o drob-
ną usterkę? Kartki, listy i e-maile oznaczcie
dopiskiem NieGra91 i nadeślijcie w terminie
45 dni od ukazania się tego numeru EdW.
Autorzy najlepszych odpowiedzi otrzymają
upominki.
Piotr Górecki
Punktacja Szkoły Konstruktorów
B
Marcin Wiązania Busko Zdrój . . . . .166
Mariusz Chilmon Augustów . . . . . . .99
Dariusz Drelicharz Przemyśl . . . . . . .95
Michał Stach Kamionka Mała . . . . . .89
Roman Biadalski Zielona Góra . . . . .61
Jarosław Tarnawa Godziszka . . . . . .58
Michał Koziak Sosnowiec . . . . . . . . .55
Jarosław Chudoba Gorzów Wlkp. . .49
Marcin Malich Wodzisław Śl. . . . . . .44
Piotr Wójtowicz Wólka Bodzechowska 44
Krzysztof Kraska Przemyśl . . . . . . . .41
Piotr Romysz Koszalin . . . . . . . . . . .39
Bartłomiej Radzik Ostrowiec Św. . . .37
Rafał Stępień Rudy . . . . . . . . . . . . . .34
Arkadiusz Zieliński Częstochowa . . .34
Szymon Janek Lublin . . . . . . . . . . . .30
Dawid Lichosyt Gorenice . . . . . . . . .30
Dariusz Knull Zabrze . . . . . . . . . . . .29
Filip Rus Zawiercie . . . . . . . . . . . . . .28
Piotr Dereszowski Chrzanów . . . . . . .24
Piotr Bechcicki Sochaczew . . . . . . . .23
Radosław Ciosk Trzebnica . . . . . . . .22
Bartek Czerwiec Mogilno . . . . . . . . .22
Mariusz Ciołek Kownaciska . . . . . . .20
Robert Jaworowski Augustów . . . . .20
Jakub Kallas Gdynia . . . . . . . . . . . . .20
Jacek Konieczny Poznań . . . . . . . . . .20
Jakub Jagiełło Gorzów Wlkp. . . . . . .18
Michał Pasiecznik Zawiszów . . . . . .18
Radosław Koppel Gliwice . . . . . . . . .17
Łukasz Cyga Chełmek . . . . . . . . . . . .16
Piotr Podczarski Redecz . . . . . . . . . .16
Andrzej Sadowski Skarżysko-Kam. .16
Jakub Świegot Środa Wlkp. . . . . . . .16
Tomasz Gajda Wrząsawa . . . . . . . . .15
Maciej Jurzak Rabka . . . . . . . . . . . .15
Ryszard Milewicz Wrocław . . . . . . . .15
Emil Ulanowski Skierniewice . . . . . .15
Krzysztof Żmuda Chrzanów . . . . . . .15
Artur Filip Legionowo . . . . . . . . . . .14
Dawid Kozioł Elbląg . . . . . . . . . . . . .14
Paweł Szwed Grodziec Śl. . . . . . . . . .14
Aleksander Drab Zdziechowice . . . .13
Wojciech Macek Nowy Sącz . . . . . . .13
Michał Gołębiewski Bydgoszcz . . . . .12
Zbigniew Meus Dąbrowa Szlach. . . .12
Tomasz Jadasch Kety . . . . . . . . . . . .11
Rafał Kobylecki Czarnowo . . . . . . . .11
Sebastian Mankiewicz Poznań . . . . .11
Marcin Piotrowski Białystok . . . . . . .11
Andrzej Szymczak Środa Wlkp. . . . .11
Marcin Dyoniziak Brwinów . . . . . . .10
Bartek Stróżyński Kęty . . . . . . . . . . .10
Mariusz Ciszewski Polanica Zdr. . . . . .9
Filip Karbowski Warszawa . . . . . . . . .9
Paweł Knioła Lublewo . . . . . . . . . . . .9
Arkadiusz Kocowicz Czarny Las . . . .9
Witold Krzak Żywiec . . . . . . . . . . . . .9
Piotr Kuśmierczuk Gościno . . . . . . . .9
Kamil Urbanowicz Ełk . . . . . . . . . . . .9
Michał Waśkiewicz Białystok . . . . . . . 9
Piotr Wilk Suchedniów . . . . . . . . . . . .9
Tomasz Badura Kędzierzyn . . . . . . . .8
Krzysztof Budnik Gdynia . . . . . . . . . .8
Adam Czech Pszów . . . . . . . . . . . . . . .8
Krzysztof Gedroyć Stanisławowo . . . .8
Przemysław Korpas Skierniewice . . . .8
Sławomir Orkisz Kuślin . . . . . . . . . . . .8
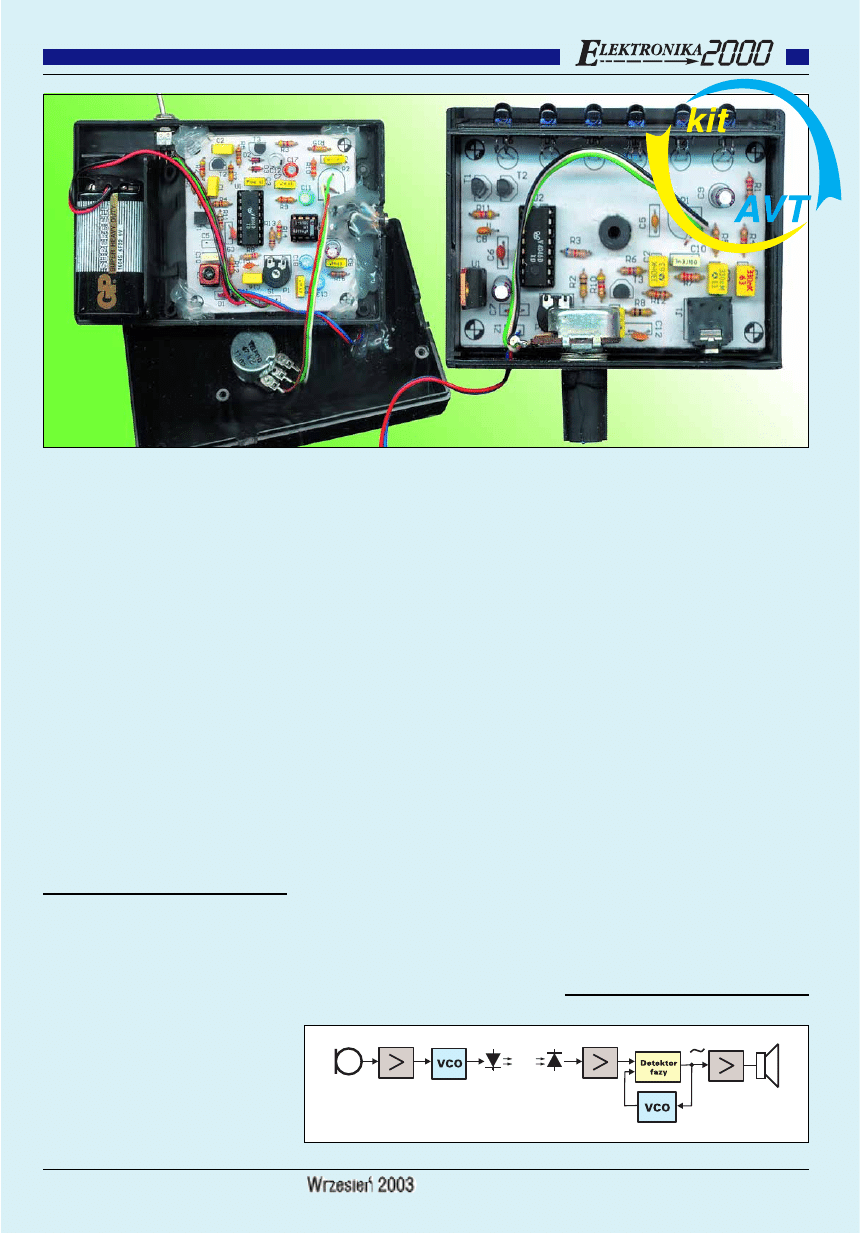
45
Elektronika dla Wszystkich
Do czego to służy?
Czasem oglądając telewizję przeszkadzamy
innym. Zwłaszcza, gdy ktoś coś czyta czy
wykonuje inne czynności. Oczywiście cho-
dzi tylko o fonię. Zastosowanie słuchawek
z długim kablem staje się niewygodne, a ra-
tunkiem mogą być bezprzewodowe słuchaw-
ki, których projekt chciałbym przedstawić.
W proponowanych słuchawkach jako me-
dium transmisyjne wykorzystywana jest pod-
czerwień, a dzięki zastosowaniu modulacji
FM (częstotliwościowej) uzyskuje się dużą
odporność na zakłócenia. Częstotliwość no-
śna nadajnika ustalona została na 100kHz.
Choć słuchawki charakteryzują się niezbyt
dużym pasmem przenoszenia, to jest ono wy-
starczające do zrozumienia treści przekazu.
Zasięg kilku metrów oraz prosta budowa to
zalety proponowanych słuchawek. Pobór
prądu odbiornika waha się w okolicach
10mA, wystarczy to na kilka godzin pracy.
Opisane niżej słuchawki bez problemu
umożliwią monofoniczne przesłanie dźwięku
z telewizora, magnetofonu, radia w obrębie
jednego pomieszczenia.
Jak to działa?
Schemat blokowy urządzenia pokazany zo-
stał na rysunku 1. Bezprzewodowe słuchaw-
ki składają się z nadajnika, którego schemat
widoczny jest na rysunku 2 oraz odbiornika
widocznego na rysunku 3.
Zaczynając od nadajnika, sygnał wejścio-
wy (może być stereo) jest wstępnie sumowa-
ny przez R4, R5. Sygnał z potencjometru re-
gulacji głośności P1 poddawany jest preem-
fazie w obwodzie C10 i R7. Preemfaza ma na
celu podbicie wysokich częstotliwości, dzię-
ki czemu zyskuje się redukcję szumów. Po
wzmocnieniu sygnału przez tranzystor T3,
podawany jest on poprzez C11 na wejście ge-
neratora VCIN, układu 4046. Rezystory R10,
R12 ustalają napięcie wejściowe generatora
na poziomie połowy napięcia zasilającego
nadajnik. Dla tej połowy napięcia, częstotli-
wość wyjściowa powinna wynosić 100kHz.
Elementy C6, R3, R2 i P2 ustalają częstotli-
wość pracy generatora VCO. Rezystancje ge-
neratora tworzą okienko o określonej często-
tliwości minimalnej i maksymalnej. Sygnał
prostokątny na wyjściu 4 U2 steruje diodami
nadawczymi poprzez tranzystory T1, T2 pra-
cujące w układzie Darlingtona. Stabilizator
U1 utrzymuje napięcie zasilające na stałym
poziomie 12V.
W odbiorniku zmodulowany sygnał
z nadajnika odbierany jest przez fotodiodę
D1. Sygnał z fotodiody D1 wzmacniany jest
przez wzmacniacz T1, czyli tak zwany
wzmacniacz selektywny. Ma on największe
wzmocnienie dla sygnału o częstotliwości
równej częstotliwości obwodu rezonanso-
wego C10 i L1. Pozostałe częstotliwości są
tłumione. Zastosowanie wzmacniacza se-
lektywnego radykalnie poprawia pracę
odbiornika. Odbiornik nie będzie reagował
na sygnały zakłócające o innych częstotli-
wościach. Elementy R17, R18 odpowiednio
polaryzują diodę D1, a R11, R19, R6, R4
ustalają punkt pracy wzmacniacza T1. Sy-
gnał ze wzmacniacza selektywnego poda-
wany jest na dwa kolejne stopnie wzmac-
niaczy zbudowanych na T2 oraz T3. Ampli-
tuda sygnału z kolektora tranzystora T3 jest
ograniczana przez obwód D2, D3 i C12, po
czym sygnał poprzez C3 podawany jest na
wejście jednego z komparatorów fazowych,
a dokładnie na jedno z wejść bramki EX-
OR. Wejście to dodatkowo poprzedzone jest
wzmacniaczem. Jako demodulator zastoso-
wana została ta sama kostka pracująca jako
modulator w układzie nadajnika. Kostka ta
zawiera w sobie dwa komparatory fazy, ge-
nerator VCO oraz diodę Zenera. Ponieważ
odbiornik jest zasilany z baterii, jej napięcie
będzie zazwyczaj spadać podczas rozłado-
wania. Dlatego też, aby poprawić stałość
parametrów demodulatora, wykorzystana
została dioda Zenera jako stabilizator napię-
cia, z którego zasilany jest układ U1. Dioda
Zenera współpracuje dodatkowo z R9 oraz
C7 i C17. Układ U1 ma dwa komparatory
fazy, z których wykorzystany został najpro-
stszy w postaci bramki EX-OR. Charaktery-
zuje się on głównie tym, że przy braku sy-
gnału na wejściu AIN VCO dostraja się do
częstotliwości spoczynkowej, oraz ma dużą
odporność na zakłócenia. Pętla stanowi
układ ze sprzężeniem zwrotnym. Jej zada-
niem jest wytworzenie w generatorze VCO
przebiegu, którego częstotliwość będzie
równa częstotliwości sygnału wejściowego,
ale jego faza będzie przesunięta o kąt
π/2.
2
2
6
6
7
7
7
7
++
++
B
B
e
e
z
z
p
p
r
r
z
z
e
e
w
w
o
o
d
d
o
o
w
w
e
e
s
s
ł
ł
u
u
c
c
h
h
a
a
w
w
k
k
i
i
Rys. 1 Schemat blokowy
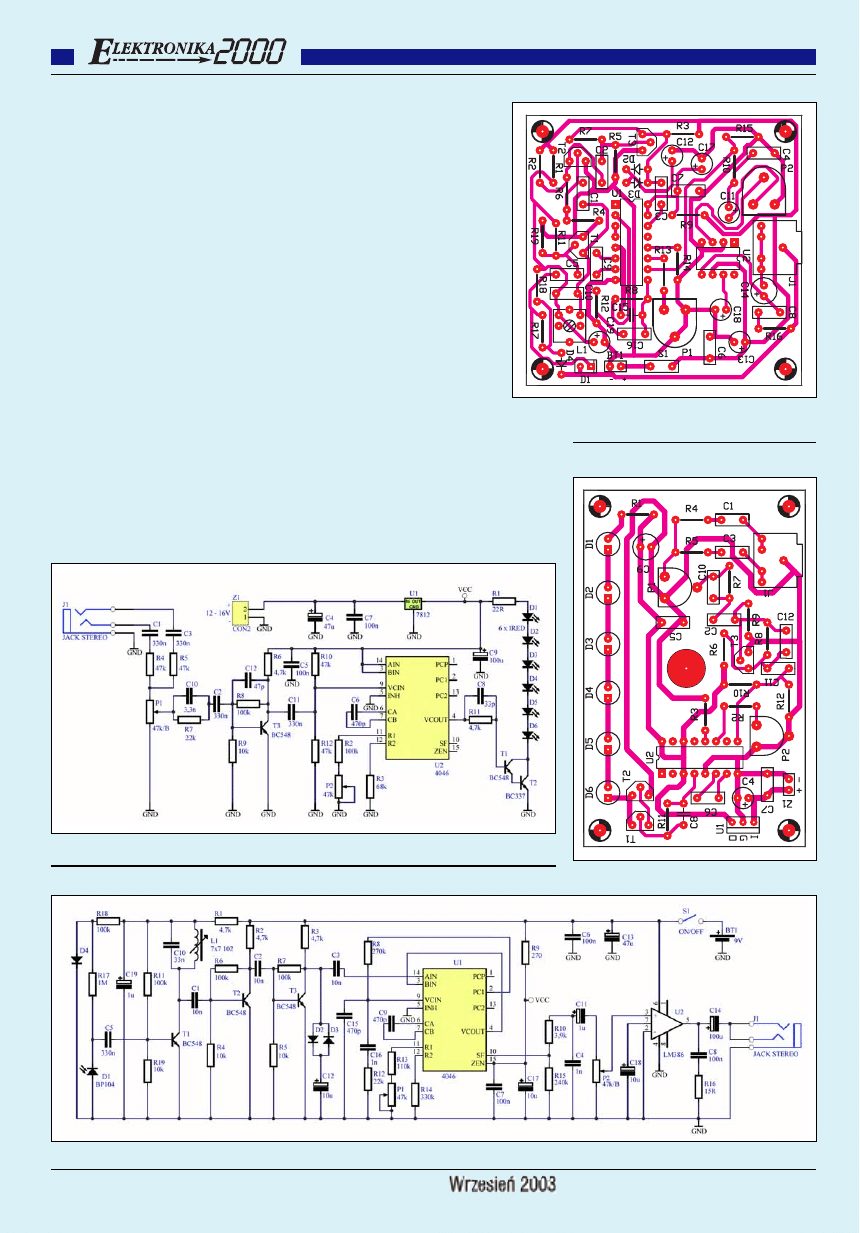
Na drugie wejście komparatora fazy BIN
podawany jest sygnał z generatora VCO.
Sygnał wyjściowy z komparatora fazy jest
poddawany całkowaniu w obwodzie R8,
C16, R12 i C15. Napięcie uzyskane z tego
filtru steruje częstotliwością generatora
VCO. Napięcie na wyjściu filtru jednocze-
śnie odwzorowuje sygnał wejściowy nadaj-
nika. Sygnał z filtru we wnętrzu U1 poda-
wany jest na wtórnik źródłowy, którego
wyjściem jest pin SF. Na wyjściu tym poja-
wia się już zdemodulowany sygnał wejścio-
wy. Sygnał ten poddawany jest deemfazie
przez R10 i C4, a następnie wzmacniany
przez wzmacniacz U2. Potencjometr P2
umożliwia regulację głośności. Wyjście
wzmacniacza poprzez C14 steruje słuchaw-
kami, które zostały połączone równolegle.
Elementy C9, C13, P1 i R14 ustalają zakres
częstotliwości wejściowej, w której nastąpi
synchronizacja U1. Potencjometr montażo-
wy P1 umożliwia dokładną regulację zakre-
su częstotliwości wejściowej. Pozostałe ele-
menty odbiornika głównie służą do filtracji
napięć zasilających. Przełącznik S1 umożli-
wia wyłączanie odbiornika ze względu na
znaczny pobór prądu odbiornika.
Montaż
i uruchomienie
Nadajnik oraz odbiornik należy
zmontować na płytkach drukowa-
nych, które są widoczne na rysun-
kach 4 i 5. Montaż należy rozpo-
cząć od elementów najmniej-
szych, kończąc na włożeniu ukła-
dów scalonych do podstawek.
Diody nadawcze nadajnika od ra-
zu można wyprofilować i przylu-
tować, by pasowały do obudowy
KM-35. Na diody nadawcze moż-
na wywiercić otwory w przedniej
ściance obudowy lub można za-
stosować czerwony filtr. Na ze-
wnątrz obudowy należy zamonto-
wać wszystkie gniazda oraz poten-
cjometr P1. W przypadku odbior-
nika jako cewkę zastosowano filtr
7x7 o numerze 102, którego rdzeń umożli-
wiał dokładną regulację częstotliwości rezo-
nansowej. Jako L1 można zastosować inne
filtry, pamiętając o zmianie wartości konden-
satora C10. Dla odbiornika zalecana jest
obudowa KM-33B, która posiada dodatkowo
pojemnik na baterię 9V. Umieszczając
46
Elektronika dla Wszystkich
Rys. 2 Schemat nadajnika
Rys. 3 Schemat odbiornika
Rys. 4 Schemat montażowy
odbiornika
Rys. 5 Schemat montażowy nadajnika
47
Elektronika dla Wszystkich
odbiornik w tej obudowie, należy odpowie-
dnio zamontować fotodiodę. Można ją
przylutować do kawałka przewodu. Otwór
na fotodiodę nie powinien być zbyt mały.
Powinien on mieć wielkość 1 – 2 cm, przy
czym może to być otwór okrągły lub pro-
stokątny. Otwór można dodatkowo przesło-
nić kawałkiem wywołanej kliszy fotogra-
ficznej. Fotodiodę można przykleić klejem
silikonowym. Inspiracją do montażu
w obudowach może być układ modelowy.
Po zamontowaniu układów w obudo-
wach nadajnik należy zasilić dowolnym na-
pięciem rzędu 12-16V. Najlepiej do tego
celu będzie się nadawał odpowiedni zasi-
lacz wtyczkowy. Jeżeli będziemy w posia-
daniu stabilizowanego zasilacza 12V, to
stabilizatora U1 można nie montować.
Regulację zarówno toru nadawczego, jak
i odbiorczego można dokonać bez żadnych
przyrządów pomiarowych. Zaczynając od
nadajnika, potencjometr P2 należy ustawić
w pozycji środkowej, natomiast gdy mamy
miernik częstotliwości, można na wyjściu
VCOUT ustawić przebieg o częstotliwości
100kHz. Do nadajnika można dołączyć
źródło sygnału audio, przy czym potencjo-
metr głośności P1 także można ustawić
w środkowe położenie. Do zestrojenia pozo-
staje jedynie odbiornik. Strojenie odbiornika
proponuję rozpocząć od niewielkich odległo-
ści od nadajnika. Przy dołączonych słuchaw-
kach należy, posługując się P1 oraz rdzeniem
cewki L1, uzyskać zadowalający odbiór sy-
gnału w słuchawkach. Regulację odbiornika
należy ponowić dla coraz to większych odle-
głości od nadajnika. Potencjometr P2 umoż-
liwia regulację głośności w słuchawkach.
Zamiast diod podczerwonych można
wykorzystać laser. Jeżeli zastosujemy jako
medium transmisyjne wiązkę laserową, to
laser powinien bezpośrednio oświetlać fo-
todiodę.
Nie pozostało mi nic innego, jak życzyć
miłego słuchania audycji czy muzyki, nie
przeszkadzając innym.
Marcin Wiązania
Wykaz elementów
Nadajnik:
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22Ω
R2,R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .68kΩ
R4,R5,R10,R12 . . . . . . . . . . . . . . . . . . . . . . . . . . . .47kΩ
R6,R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7kΩ
R7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22kΩ
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
P1 . . . . . . . . . . . . . . . . . .potencjometr obrotowy 47kΩ/B
P2 . . . . . . . . . . . . .potencjometr montażowy leżący 47kΩ
Kondensatory
C1,C2,C3,C11 . . . . . . . . . . . . . . . . . . . . . . . . . . . .330nF
C4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47µF/16V
C5,C7 . . . . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
C6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470pF
C8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33pF
C9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3,3nF
C12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47pF
Półprzewodniki
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7812
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4046
T1,T3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548
T2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC337
D1-D6 . . . . . . . . . . . . . . . . . . .diody podczerwieni LD271
Inne
J1 . . . . . . . . . . . . . .gniazdo JACK STEREO 3mm do druku
lub przykręcane do obudowy
Obudowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .KM-35
Odbiornik:
Rezystory
R1,R2,R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4,7kΩ
R4,R5,R19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R6,R7,R11,R18 . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .270kΩ
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .270Ω
R10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3,9kΩ
R12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22kΩ
R13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .110kΩ
R14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .330kΩ
R15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .240kΩ
R16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15Ω
R17 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
P1 . . . . . . . . . . . . .potencjometr montażowy leżący 47kΩ
P2 . . . . . . . . . . . . . . . . . .potencjometr obrotowy 47kΩ/B
Kondensatory
C1,C2,C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10nF
C4,C16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1nF
C5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .330nF
C6,C7,C8 . . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
C9,C15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470pF
C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33nF
C11,C19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1µF/16V
C12,C17,C18 . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/16V
C13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47µF/16V
C14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
Półprzewodniki
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4046
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM386
T1,T2,T3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . .BP104 lub BPW34
D2,D3,D4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
Inne
J1 . . . . . . . . . . . . . . . . . . . .gn. jack stereo 3mm do druku
lub przykręcane do obudowy
L1 . . . . . . . . . . . . . . . . . . . . . . . .Filtr 7x7 o numerze 102
BT1 . . . . . . . . . . . . . . . . . . . . . . . . .złączka do baterii 9V
S1 . . . . . . . . . . . . . . . . . . . . . . . . .przełącznik hebelkowy
Obudowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .KM-33B
KKoom
mpplleett ppooddzzeessppoołłóóww zz ppłłyyttkkąą jjeesstt ddoossttęęppnnyy ww ssiieeccii hhaannddlloowweejj AAVVTT jjaakkoo kkiitt sszzkkoollnnyy AAVVTT-22667777
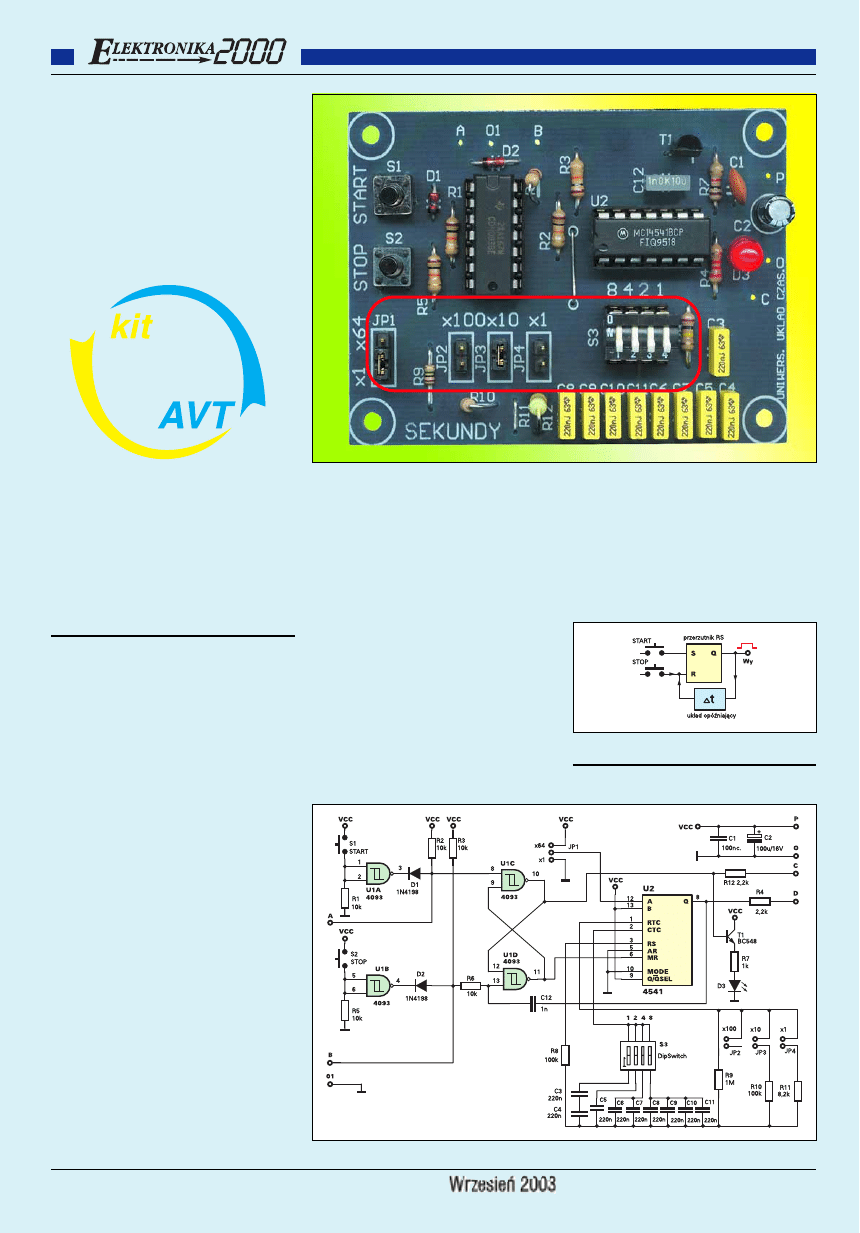
48
Elektronika dla Wszystkich
Do czego to służy?
Jak wskazuje nazwa, jest to układ czasowy,
wytwarzający impulsy o czasie trwania od 1
sekundy do ponad 26 godzin. Przez zmianę
elementów można uzyskać zarówno dużo
krótsze, jak i dużo dłuższe czasy. Po sygnale
START układ wytwarza impuls o wyznaczo-
nym czasie, ale impuls ten można skrócić, po-
dając sygnał STOP.
Jak to działa?
Schemat blokowy pokazany jest na rysunku
1. Przerzutnik RS (U1C, U1D) współpracuje
z dwoma przyciskami START, STOP, pozwa-
lającymi w dowolnym momencie rozpocząć
i zatrzymać jego pracę. Dodatkowo po usta-
wieniu przerzutnika zostaje włączony układ
czasowy, który automatycznie zeruje prze-
rzutnik po upływie wyznaczonego czasu.
Schemat ideowy układu pokazany jest na
rysunku 2. Rozwiązanie jest typowe i zawie-
ra przerzutnik zbudowany z bramek NAND
oraz popularny układ czasowy CMOS 4541.
Godną uwagi cechą jest możliwość ustawie-
nia dowolnego czasu działania w zakresie od
1s do 96000s, czyli ponad 26 godzin, za po-
mocą zwór i przełącznika.
Skokową zmianę czasu w zakresie 1...15
jednostek umożliwia przełącznik „dwójkowy”
S3, który dołącza do obwodu oscylatora odpo-
wiednie pojemności. Wartości pojemności
włączanych przez kolejne styki przełącznika
S3 są do siebie w stosunku 1:2:4:8 (110nF,
220nF, 440nF, 880nF), co umożliwia ustawie-
nie czasu na zasadzie kodu dwójkowego.
Zwory JP2, JP3, JP4 pozwalają zmieniać
mnożnik czasu w sekwencji 100:10:1. W danej
chwili powinien być czynny tylko jeden z tych
trzech jumperków. Gdy włączony jest jumper
JP4, dołączony rezystor R11 powoduje, że czę-
stotliwość jest największa, co daje najkrótsze
czasy. Obecność JP3 dziesięciokrotnie
zmniejsza częstotliwość, czyli dziesięciokrot-
nie zwiększa czas. Przy braku JP3, JP4 dołą-
czony jest rezystor R9 i częstotliwość jest naj-
mniejsza. Dla jasności dodano jednak jumper
JP2, który wprawdzie niczego nie łączy, ale
przypomni, że włączony jest mnożnik x100.
Zwora JP1 wyznacza mnożnik czasu x1
albo x64 przez zmianę współczynnika
podziału wewnętrznego licznika kostki 4541.
Teoretycznie współczynnik podziału wynosi
albo 1024, albo 65536, zależnie od stanu lo-
gicznego nóżki 12, czyli wejścia programują-
cego A, ale w wykorzystanym trybie pracy
wynosi 512 albo 32768, a elementy RC są tak
dobrane, żeby uzyskać czas w sekundach. Na
fotografii wstępnej czerwoną obwódką za-
znaczono fragment płytki drukowanej z ele-
mentami do ustawiania czasu.
Głównym wyjściem modułu jest punkt C,
gdzie po naciśnięciu S1 pojawia się stan wy-
soki na ustalony czas. Kontrolka D3 infor-
muje o stanie aktywnym. Na dodatkowym
wyjściu D na koniec ustalonego czasu poja-
wia się bardzo krótki impuls ujemny, który
może być wykorzystany przy nietypowym
zastosowaniu modułu.
2
2
6
6
2
2
2
2
+
+
+
Rys. 1 Schemat blokowy
Rys. 2 Schemat ideowy
U
U
n
n
i
i
w
w
e
e
r
r
s
s
a
a
l
l
n
n
y
y
u
u
k
k
ł
ł
a
a
d
d
c
c
z
z
a
a
s
s
o
o
w
w
y
y
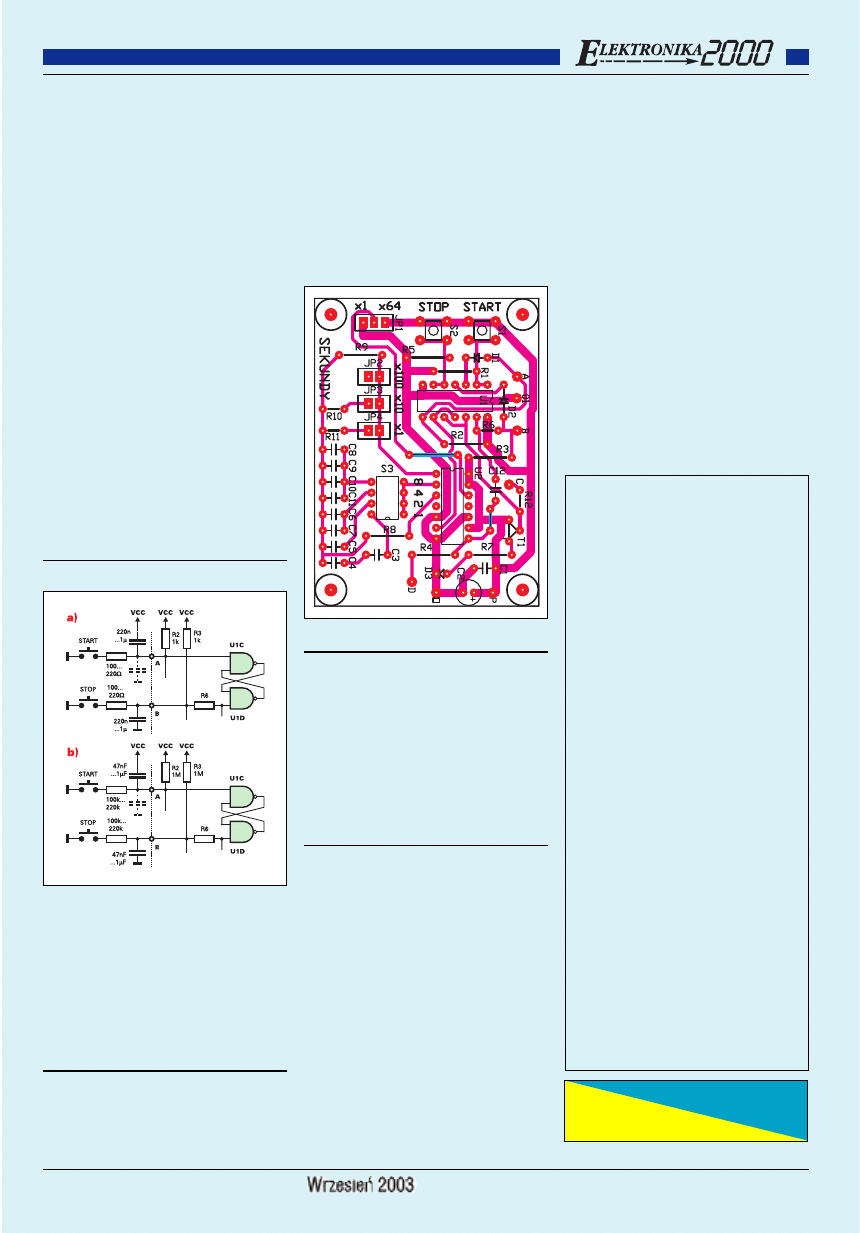
Naciśnięcie S1 ustawia przerzutnik RS
i rozpoczyna pracę układu czasowego U2. Po
ustawionym czasie przerzutnik zostanie wy-
zerowany opadającym zboczem podanym
przez kondensator C12. Przycisk S2 umożli-
wia wyzerowanie przerzutnika w dowolnej
chwili i skrócenie czasu działaniu układu.
Przyciski S1, S2 zapewniają sterowanie
stanem wysokim. Równolegle do przycisków
S1, S2 albo zamiast nich można dołączyć do-
datkowe przyciski za pomocą przewodów.
Przy zdalnym sterowaniu przewodowym
częściej wykorzystuje się sterowanie przez
zwarcie do masy. W tym celu przewidziano
dodatkowe punkty A, B, do których można
dołączyć przyciski (kontaktrony, tranzystory)
zwierające do masy.
Przy zdalnym sterowaniu z wykorzysta-
niem zewnętrznych przycisków dołączonych
długimi przewodami trzeba się liczyć z zewnę-
trznymi zakłóceniami. Dla zwiększenia odpor-
ności na zewnętrzne zakłócenia można zmniej-
szyć wartości rezystorów R1, R5, ewentualnie
R2, R3 do 2,2k
Ω, a nawet do 1kΩ. Można też
dodać kondensatory filtrujące, co jeszcze bar-
dziej zabezpieczy przed przypadkowymi śmie-
ciami. Na rysunku 3 podane są sposoby
zwiększenia odporności na zakłócenia.
Dokładność odmierzania czasu wynika
przede wszystkim z rozrzutu wartości ele-
mentów C3...C11 i R8...R11 i powinna całko-
wicie wystarczyć do typowych zastosowań.
Wartości rezystorów R9, R10, R11 mogą
się wydać dziwne i niezgodne z wzorem z ka-
talogu (f = 1 / 2,3*RT*CT). Wynika to z faktu,
że przy zmianie wartości RT (R9, R10, R11)
nie zmienia się wartość RS (R8), która w typo-
wych układach jest dwukrotnie większa od RT.
Montaż i uruchomienie
Montaż układu na płytce pokazanej na ry-
sunku 4 jest łatwy i nie powinien sprawić
trudności nawet mało doświadczonym. Ele-
menty należy lutować, zaczynając od naj-
mniejszych (zwory, rezystory), a układy sca-
lone włożyć do podstawek na samym końcu.
Układ poprawnie zmontowany ze spraw-
nych elementów nie wymaga uruchamiania
i od razu będzie pracował. Potrzebny czas
działania układu czasowego w zakresie 1...15
należy ustawić w kodzie dwójkowym za po-
mocą S3. Następnie należy ustawić mnożni-
ki, zakładając jumper J1 oraz jeden z jumper-
ków J2, J3, J4.
Uwaga! Należy założyć tylko jeden z JP2,
JP3, JP4, a jumper JP1 musi zwierać środko-
wy kołek do jednego z punktów skrajnych
(nie można pozostawić nóżki 12 U2 „wiszą-
cej w powietrzu”).
Gdyby układ miał pracować w trudnych
warunkach atmosferycznych, należy go
umieścić w hermetycznej obudowie i staran-
nie uszczelnić przepusty kabli. Jeśli czas nie
będzie zmieniany, można zastosować sposób
prostszy: zalać cały układ silikonem.
Możliwości zmian
Kto chciałby precyzyjnie kontrolować czas
musiałby przede wszystkim dobrać jednako-
we kondensatory C3...C11. Nie muszą one
mieć nominalnej wartości, byle tylko były
jednakowe. Można też zmienić układ i zasto-
sować przełącznik S3 o większej liczbie sty-
ków, a do tego dobrane kondensatory o więk-
szych wartościach. Następnie trzeba byłoby
dobrać R9, żeby przy dołączeniu tylko C3,
C4 częstotliwość wynosiła 20,48Hz (najwyż-
sza częstotliwość, najkrótszy czas). Wtedy
przy mnożniku x1 ustawionym za pomocą
JP1 czas powinien być regulowany za pomo-
cą S3 w zakresie 100s...1500s. Następnie na-
leży założyć zworę JP3 i dobrać R10, żeby
przy dołączeniu C3, C4 częstotliwość wyno-
siła 204,8Hz, co da czasy 10s...150s. Na ko-
niec trzeba rozewrzeć JP3 i po zwarciu JP4
dobrać R11, żeby przy dołączeniu C3, C4
częstotliwość wynosiła 2048Hz, co da czasy
1...15s.
Zastosowany sposób skokowej regulacji
czasu w zakresie 1...15 z mnożnikami 1, 10,
100 oraz „cyfrowym” mnożnikiem x1, x16,
x64 okaże się dobry do większości zastoso-
wań. Zapewnia też szeroki zakres regulacji.
Jednak gdyby potrzebna była większa roz-
dzielczość, można zmodyfikować wartości
rezystorów R9, R10, R11, by zamiast mnoż-
ników x1, x10, x100 uzyskać x1, x4, x16. Da
to lepszą rozdzielczość, ale mniejszy zakres
regulacji: 1s...15360s, zamiast 1s...96000.
Rozdzielczość można jeszcze zwiększyć sto-
sując takie wartości R9-R11, by uzyskać
mnożniki x1, x2, x4, a dodatkowo połączyć
nóżki 12, 13 U2, by uzyskać „cyfrowy”
mnożnik x1 i x8.
Tomasz Fertak
49
Elektronika dla Wszystkich
Wykaz elementów
Rezystory
R1-R3, R5,R6 . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R4,R12 . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2kΩ
R7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ
R8 R10 . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8,2kΩ
Kondensatory
C1 . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
C12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1nF
C2 . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C3-C11 . . . . . . . . . . . . . . . . . . . . . . . . . . .220nF
Półprzewodniki
D1, D2 . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
D3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LED
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4093
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4541
Pozostałe
JP1 . . . . . . . . . . . . . . . . . . . . . . . . . . .jumper x 3
JP2-JP4 . . . . . . . . . . . . . . . . . . . . . . . .jumper x 2
S1,S2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .µswich
S3 . . . . . . . . . . . . . . . . . . . . . . . . . .DipSwitch x 4
KKoom
mpplleett ppooddzzeessppoołłóóww zz ppłłyyttkkąą jjeesstt
ddoossttęęppnnyy ww ssiieeccii hhaannddlloowweejj AAVVTT jjaakkoo
kkiitt sszzkkoollnnyy AAVVTT-22662222
Rys. 3
Rys. 4 Schemat montażowy
50
Elektronika dla Wszystkich
Do czego to służy?
Nieodzownym elementem każdego urządze-
nia nadawczo-odbiorczego jest odpowiednia
antena. Nie jest to stwierdzenie odkrywcze,
ale warte przypomnienia. Bo choć nastąpiła
w radiokomunikacji wielka ewolucja jeśli
chodzi o układy elektroniczne, to w technice
antenowej niewiele się zmieniło. Cóż, praw
fizyki nie da się zmienić.
Na rynku oraz w prasie krótkofalarskiej
można spotkać opisy wielu typów różnych
anten. Są tam zarówno gotowe anteny reno-
mowanych firm światowych, jak i opisy an-
ten do samodzielnego wykonania.
Trzeba jednak przyznać, że gotowe ante-
ny są dość drogie. Często za kilka rurek alu-
miniowych trzeba zapłacić spore pieniądze.
Z tego też względu wielu Czytelników po-
szukuje opisów anten do samodzielnego wy-
konania. Z lisów wynika, że najchętniej są
poszukiwane opisy małowymiarowych i ta-
nich anten KF, łatwych do zamontowania np.
na balkonie.
Jedną z takich anten jest właśnie opisywa-
na poniżej antena DDRR czy „Hula-Hoop”,
a do jej wykonania potrzebne są w zasadzie
dwie obręcze rowerowe, czyli tak zwane fel-
gi, które można dostać np. w warsztacie na-
prawy rowerów.
Jak to działa?
Antena DDRR (Directional Discontinuity
Ring Radiator) została wynaleziona w 1962
roku przez amerykańskiego krótkofalowca
W6UYH.
Od tego czasu przeszła ona wiele modyfika-
cji, ale pozostała idea: nad okrągłą płytą uzie-
miającą, na przykład kołem wyciętym z blachy
czy obręczą, w odległości h=0,007
λ znajduje
się ustawiony poziomo promiennik o obwodzie
nieco mniejszym niż 0,25
λ.
Warunki rezonansu ćwierćfalowego zo-
stały osiągnięte po uwzględnieniu współ-
czynnika skrócenia, za pomocą kondensatora
obrotowego spełniającego rolę pojemnościo-
wego obciążenia końcowego.
Samo dopasowanie zasilania do kabla
koncentrycznego jest realizowane bezproble-
mowo w bardzo prosty sposób poprzez
podłączenie się do promiennika od strony
zimnego zakończenia.
Zasadniczym wymaganiem dla osiągnię-
cia wysokiej skuteczności tej spolaryzowanej
pionowo anteny jest, oprócz dużej po-
wierzchni przewodnika pierścieniowego, do-
bra właściwość izolacyjna (niskie straty) mo-
cowań dystansowych.
Po zastosowaniu aluminiowej felgi 28”
o średnicy 622mm, obwód koła ma około
195cm. Dla zakresu CB czy pasma 10m wy-
starczająca do osiągnięcia rezonansu jest po-
jemność kondensatora ok. 10pF. Zwiększając
pojemność można łatwo dostroić antenę na-
wet do pasma 20m (kondensator o pojemno-
ści około 100pF).
W miarę dokładną częstotliwość rezo-
nansu anteny można ustalić dla obydwu wy-
mienionych zakresów i wszystkich leżących
pomiędzy nimi za pomocą GDO, którego
cewka powinna zostać umieszczona równo-
legle do promiennika w pobliżu punktu za-
silania.
Montaż i uruchomienie
Przedstawiona na zdjęciu antena składa się
z dwóch obręczy aluminiowych o średnicy
28”, ustawionych do siebie równolegle w od-
ległości 10cm. Dolną felgę pozostawiono bez
zmian, zaś z obręczy spełniającej rolę pro-
miennika został wycięty odcinek o długości
3cm. Połączenie pomiędzy zimną końcówką
promiennika a obręczą reflektora zostało wy-
konane z kawałka płaskownika aluminiowe-
go. Do gorącej końcówki
promiennika został przy-
mocowany demobilowy,
powietrzny kondensator
obrotowy o wysokim na-
pięciu przebicia, o ma-
ksymalnej pojemności
około 100pF, przestraja-
ny poprzez nacięcie dla
izolowanego śrubokręta.
Ząbkowane podkładki
sprężyste w połączeniach
skręcanych gwarantują
odpowiedni kontakt gal-
waniczny. Do skręcania
nie można używać śrub
miedzianych. Można
użyć aluminiowych ni-
tów lub zwykłych śrub.
A
A
n
n
t
t
e
e
n
n
a
a
D
D
D
D
R
R
R
R
+
+
Rys. 1 Szkic konstrukcyjny anteny
DDR
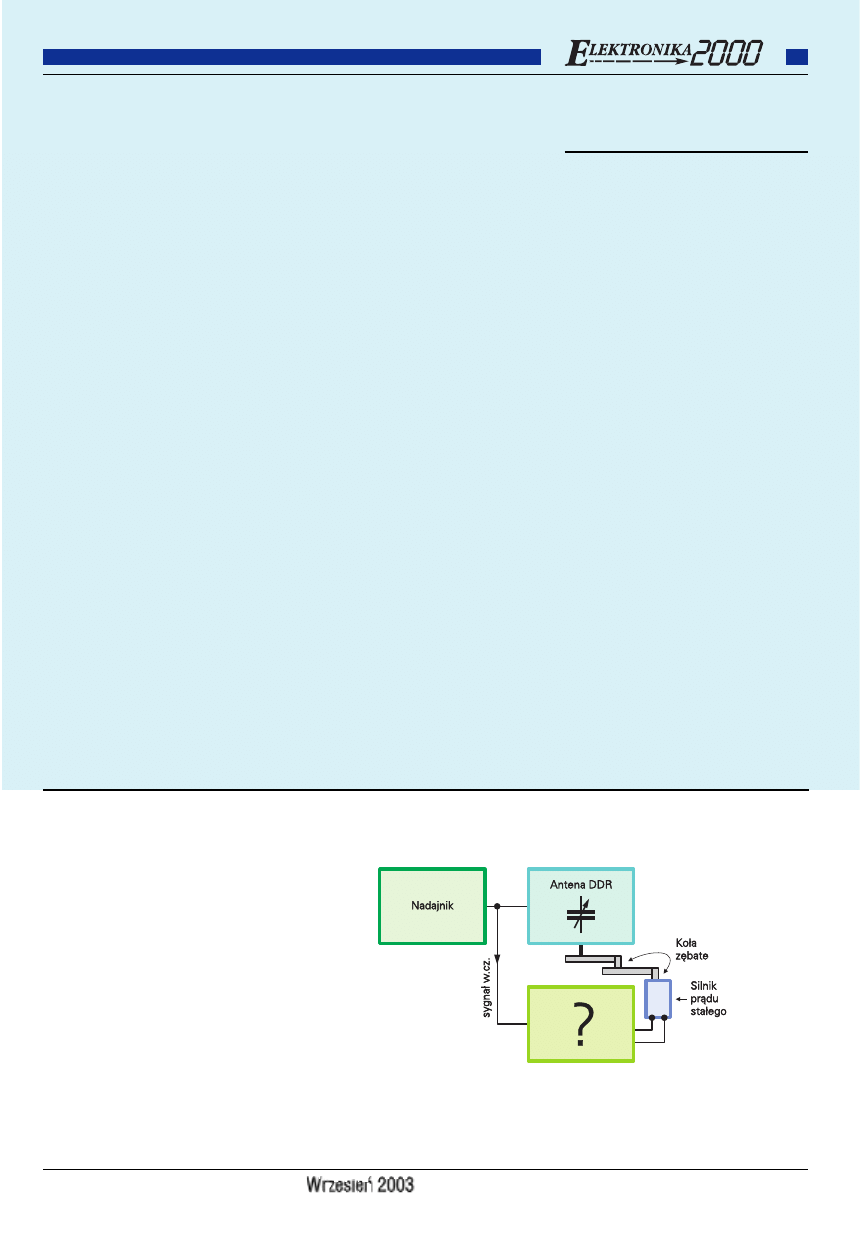
Połączenia dystansowe najlepiej jest wy-
konać z materiału akrylowego (np. z pleksi-
glasu).
Antenę odbiornika można bez większego
problemu precyzyjnie dostroić na największą
siłę odbieranego sygnału. Jeżeli antena ma
pracować dwukierunkowo, np. we współpra-
cy z radiotelefonem lub transceiverem, najle-
piej jest zestroić ją podczas nadawania przy
wykorzystaniu miernika SWR na minimum
fali odbitej. Można także spróbować użyć ne-
onówki (maksymalna jasność świecenia),
którą należy jednobiegunowo zamocować na
gorącej końcówce kondensatora obrotowego.
W przypadku osiągnięcia rezonansu, w da-
nym punkcie występuje równie wysokie na-
pięcie, jakie spotykane jest w antenach ma-
gnetycznych.
W pasmie 20m uzyskano (przy wystar-
czającym SWR) nadającą się jeszcze do wy-
korzystania szerokość pasma 40kHz, pod-
czas gdy dla zakresu CB (27,200MHz) pa-
smo powiększyło się do 400kHz, czyli na ca-
łą szerokość.
Mając kilka niepotrzebnych kół rowero-
wych można w wolnej chwili trochę poeks-
perymentować.
Na przykład dla pasma 10m czy CB moż-
na zbudować anteny, które będą różniły się
pomiędzy sobą jedynie sposobem wykonania
reflektora. W reflektorze można pozostawić
połowę szprych.
Zamiast poszukiwać dobrego kondensato-
ra obrotowego, można zastąpić go odcinkiem
przewodu koncentrycznego przylutowanego
do gorącej końcówki promiennika. W tym
celu trzeba znać pojemność jednostkową ka-
bla, np. 1cm RG-213 ma około 1pF.
Dostrojenie takiej anteny jest jednorazo-
we, poprzez obcięcie przewodu.
Niemieccy krótkofalowcy sprawdzili, że
dla częstotliwości rezonansowej 28,5MHz
długość tego odcinka przewodu jako konden-
satora powinna wynosić około 20cm.
Antena z pozostawionymi szprychami jest
bardziej wąskopasmowa. Szerokość pasma
bez dodatkowego dostrojenia wynosiła tylko
110kHz w wersji ze szprychami, podczas gdy
bez szprych uzyskano 130kHz.
W ostatnim czasie wielu krótkofalowców,
także w Polsce, próbuje eksperymentować
z antenami w pasmie 50MHz (6m).
Przeprowadzanie prób z antenami z obrę-
czy rowerowych okazały się wyjątkowo inte-
resujące, gdyż przy stosunkowo niewielkim
nakładzie pracy można uzyskać wspaniałe
rezultaty.
Niestety, nawet najmniejsze 26” felgi alu-
miniowe, jakie można znaleźć wśród złomu
albo w warsztacie naprawy rowerów, nie da-
wały możliwości zbudowania anteny DDRR
dla pasma 6m (zbudowanie anteny magne-
tycznej nie stanowiło żadnego problemu),
gdyż nawet bez kondensatora na gorącym
końcu własna częstotliwość rezonansowa le-
żała w pobliżu 40MHz.
Ze względu na trudności w znalezieniu
małych felg aluminiowych, można spróbo-
wać zbudować antenę DDRR na bazie stalo-
wych felg z roweru dziecięcego, licząc się
z gorszymi efektami.
Reflektor można wykonać z tylnego koła
20”, zawierającego jedynie połowę szprych
(piasta z hamulcem doskonale nadaje się ja-
ko element mocujący). Jako promiennika
można użyć felgi 18”.
Z uwagi, że nadajnik dla pasma 6m posia-
da z reguły małą moc, wynoszącą zaledwie
10W, to kondensator dostrajania 15pF nie
musi charakteryzować się tak wysokim na-
pięciem pracy, jak dla 100W (dodatkowo do-
łączony równolegle kondensator ceramiczny
o tej samej pojemności przejmuje przynaj-
mniej połowę tego napięcia).
Testy z tak wykonaną anteną wykazały, że
w pasmie 6m szerokość pasma użytkowego
wynosi bez dostrajania maksymalnie 140kHz.
Wnioski końcowe
Skuteczność anten DDRR jest około 2,5dB gor-
sza od anten poziomych. Mogą one za to konku-
rować z poziomymi antenami ćwierćfalowymi.
Opisane powyżej anteny DDRR (1/4
λ)
charakteryzowały się stosunkowo wąskim
pasmem, co jest dosyć uciążliwe ze względu
na konieczność dostrajania w przypadku cią-
głego wykorzystania przy zmiennych warun-
kach pogodowych. Dalsze próby wykazały,
że anteny pierścieniowe
λ/2 wyróżniały się
znacznie większą szerokością pasma.
Zasada budowy takich anten jest podob-
na, jak poprzednio.
Reflektor także może mieć formę obręczy,
jak również ustawiony nad nim pierścień
promiennika, z tym że teraz w większej odle-
głości (0,05
λ) niż dla anten λ/4. Poza tym
pierścień pozostaje teraz zamknięty, co ma
zdecydowane zalety, jeśli chodzi o konstruk-
cję mechaniczną, a poza tym nie jest potrzeb-
ny żaden kondensator do dostrajania. Nieste-
ty, nawet stosując największe obręcze rowe-
rowe – 28”, nie jest możliwe wykonanie an-
teny dla fal krótkich.
Próby niemieckich krótkofalowców wy-
kazały, że anteny takie mogą być używane
w zakresie UKF.
Łatwo zauważyć, że najmniejsze typowe
obręcze kół rowerowych – 16”- mają średni-
cę 30,5cm (obwód 104cm), a to jest dokła-
dnie
λ/2 dla amatorskiego pasma 2m lub
3/2
λ dla pasma 70cm.
W każdy razie antena DDRR spełnia
wszystkie wymagania, jeśli chodzi o małe
wymiary i niską cenę, a to się bardzo liczy
w praktyce radioamatorskiej.
Andrzej Janeczek
51
Elektronika dla Wszystkich
Konkurs
Zaprojektować układ
automatycznego sterowania silnika
zmieniającego pojemność
kondensatora obrotowego
anteny DDRR
Odpowiedzi, koniecznie oznaczone dopiskiem „Konkurs - DDRR 09/03”, należy nadsyłać w terminie 45 dni od ukazania
się tego numeru EdW. Nagrodami w konkursie będą kity AVT lub książki.
52
Elektronika dla Wszystkich
Do czego to służy?
Tę nietypową nazwę nosi urządzenie które
ma poprawić widoczność pieszych na dro-
dze, a jednocześnie atrakcyjnością zachęcić
do jego używania. Krokoludek - skąd taka
nietypowa nazwa? Pochodzi od połączenia
dwóch wyrazów kroko- od chodzenia, a lu-
dek od sposobu ułożenia diod LED.
Urządzenie jest typowym „gadżetem”
przypinanym do np. tornistra. Co tak właści-
wie oferuje? Budzi się po wykryciu ruchu pie-
szego i sygnalizuje naprzemiennym mruga-
niem dwukolorowych diod LED każdy z kro-
ków. Przy chwilowym zatrzymaniu się idące-
go miga tylko czerwoną częścią diod. W przy-
padku dłuższego bezruchu, np. odłożenia tor-
nistra, przechodzi w tryb uśpienia po czasie
około 3min. i praktycznie nie pobiera prądu.
Jak to działa?
Na rysunku 1 przedstawiony został schemat
ideowy. Cały krokoludek to dwa układy z serii
4000 i kilkanaście elementów pomocni-
czych. Ważnym kryterium budowy urządze-
2
2
6
6
1
1
3
3
+
+
Rys. 1 Schemat ideowy
K
K
r
r
o
o
k
k
o
o
l
l
u
u
d
d
e
e
k
k
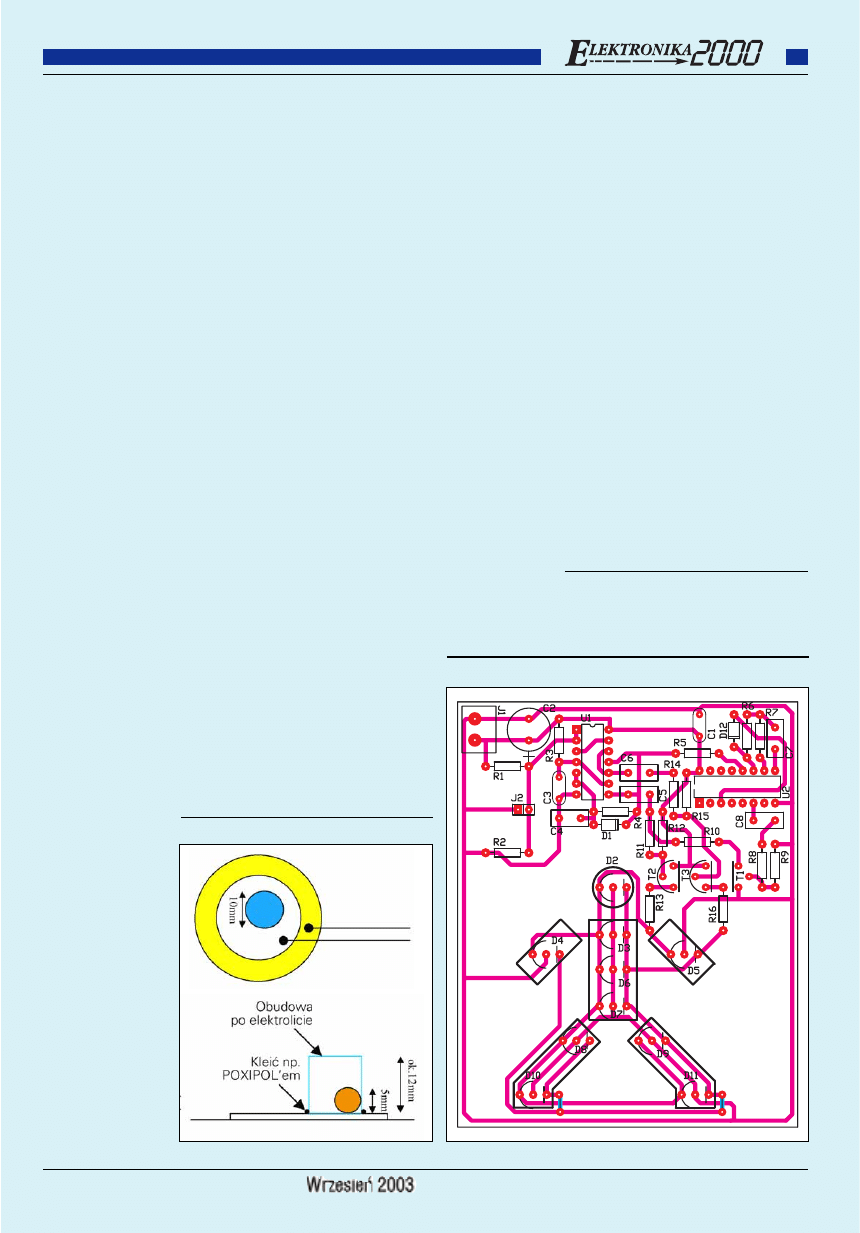
nia była jego prostota. Poza tym jako urzą-
dzenie zasilane z baterii powinno pobierać
jak najmniejszy prąd. Najlepiej gdyby posia-
dało automatyczny wyłącznik zasilania.
Układ udało się zbudować z wykorzystaniem
dwóch popularnych układów CMOS. Jak
wiadomo układy CMOS mogą pracować już
przy 3V, a w spoczynku praktycznie nie po-
bierają prądu, co pozwoliło zasilać krokolud-
ka z dwóch paluszków. Baterie te są stosun-
kowo tanie, i będą zasilać urządzenie przez
długi czas. Opis działania można poznać, śle-
dząc drogę sygnału. Sygnał z czujnika trafia
na wejście bramki U1A. Bramka ta posiada
histerezę konieczną do zamiany stosunkowo
wolnego i zakłóconego sygnału z czujnika na
przebieg prostokątny. Oczywiście przebieg
ten pojawia się tylko w czasie ruchu, a jego
częstotliwość jest ściśle określona przez
prędkość poruszania się. Czujnikiem jest bla-
szka piezo z doklejoną obudową po elektroli-
cie i umieszczoną wewnątrz metalową kulką.
Taki czujnik dobrze spełnia swoją funkcję
i zapewnia wystarczającą czułość do bezpo-
średniego wysterowania bramki 4093. Po-
trzebne były jedynie rezystory R1, R2, pola-
ryzujące wstępnie wejście bramki. Dalej sy-
gnał trafia na wejście przerzutnika RS zbudo-
wanego z dwóch kolejnych bramek z układu
4093. Elementy R3, C3 zapewniają wyzero-
wanie przerzutnika po załączeniu zasilania
i zostały dodane profilaktycznie. Przerzutnik
współpracuje ściśle z bramką U1B, tworząc
w sumie wyzwalany monowibrator. Czujnik
z blaszką piezo ma pewną wadę objawiającą
się tym, że każdemu pierwszemu pojedyn-
czemu impulsowi towarzyszą kolejne wąskie
szpilki, będące wynikiem tłumienia drgań
mechanicznych czujnika. Śmieci te skutecz-
nie usuwa monowibrator, wyzwala się na
pierwszym impulsie i przez czas określony
przez R4, C4 generuje jeden impuls o stałej
długości. Elementy R4,C4 muszą mieć taką
wartość (nie za małą),
aby wygasły drgania
blaszki, a jednocze-
śnie (nie za dużą), aby
monowibrator był go-
towy na kolejny im-
puls. Dioda D1 przy-
śpiesza rozładowanie
C4 tak, że zaraz po za-
kończeniu impulsu
przez monowibrator
układ jest gotowy na
przyjęcie sygnału
z czujnika. To tyle na
temat jakby to na-
zwanego uczenie: ob-
wodu formowania sy-
gnału. Teraz zajmijmy
się opisem tego co cie-
szy oko, czyli mruga-
jących diod. 10 dwu-
kolorowych diod to
chyba minimum aby można było ułożyć je
w zarysie ludka. Niestety zwiększanie ilości
diod zwiększy koszty urządzenia, a także po-
bór mocy. W diodach tych wszystkie anody
koloru zielonego i wszystkie anody koloru
czerwonego połączone są razem i sterowane
przez dwa tranzystory PNP. Takie wspólne
połączenie anod stawia warunek aby wszyst-
kie diody były tego samego typu, inaczej bę-
dą świecić (mrugać) z różną intensywnością.
Dodatkowe rezystory R13 i R16 ograniczają
prąd diod i są odpowiednie dla zasilania 3V.
Gdyby ktoś chciał zwiększyć napięcie zasila-
nia koniecznie musi zwiększyć te rezystory.
T2 i T3 typu BC327 posiadają zwiększony
prąd kolektora np. w porównaniu z BC557
właśnie aby skutecznie sterować połączone
równolegle diody. Tranzystory sterujące dio-
dami otwierają się na krótką chwilę w mo-
mencie gdy na którymś z wyjść przerzutnika
RS pojawia się stan niski. Wygląda to tak:
najpierw w momencie wyzwolenia przerzut-
nika-monowibratora, równo z impulsem
z blaszki piezo zapalają się diody zielone,
potem gasną. Następnie, gdy kończy się im-
puls - na wyjściu U1D zapalają się diody
czerwone. Czas świecenia się diod określa
stała czasowa R11, C5 i C6, R14, i wydaje
się być rozwiązaniem optymalnym. To w za-
sadzie tyle, jeśli chodzi o samego migające-
go ludka.
A co z obiecanym automatycznym wy-
łącznikiem? Podstawowa wersja nie wyma-
gała w zasadzie wyłącz-
nika, bo prąd spoczyn-
kowy 4093 jest zniko-
my, w zasadzie prąd
przepływa tylko przez
szeregowo połączone
R1, R2. Okazało się, że
najbardziej zabrakło
nie autowyłącznika,
a obwodu podtrzymy-
wania sygnalizacji przy krótkotrwałym zani-
ku impulsów z czujnika. Wyobraźmy sobie
taką sytuację: ktoś na krótko zatrzymuje się
na rozmowę ze znajomym, pozostaje jednak
nadal na drodze. Sygnalizator oparty tylko na
czujniku ruchu zatrzyma się. Nasz krokolu-
dek ma na szczęście wbudowaną kość 4060,
która przejmuje inicjatywę w takiej sytuacji.
Wejście resetujące tego układu dołączone
jest do wyjścia monowibratora przez R5. Tak
więc każdy krok zeruje układ 4060 i jego
praca nie ma wpływu na resztę układu. Do-
piero w sytuacji zaniku sygnału (stan niski na
wyjściu U1D), układ poprzez C8, R8, T1 na
krótko otwiera tranzystor odpowiedzialny za
świecenie diod czerwonych. Elementy gene-
ratora w układzie 4060 zostały tak dobrane,
aby impulsy na wyjściu Q7 pojawiały się co
około 2s. Gdy zanik sygnału jest dłuższy
i trwa tak długo aż na wyjściu Q14 pojawi się
stan wysoki, następuje zablokowanie się ge-
neratora poprzez diodę D12 i wspomniane
uśpienie krokoludka. Układ przestanie samo-
czynnie generować błyski czerwonych diod.
Następny takt w generatorze 4060 pojawi się
dopiero po zresetowaniu układu, czyli gdy
wykonamy chociaż jeden krok. Czas po-
trzebny do uśpienia urządzenia to około 3
min.
Montaż i uruchomienie
Pierwszym etapem budowy urządzenia jest
wykonanie czujnika (rysunek 2). W tym
53
Elektronika dla Wszystkich
Rys. 3 Schemat montażowy
Rys. 2 Budowa czujnika
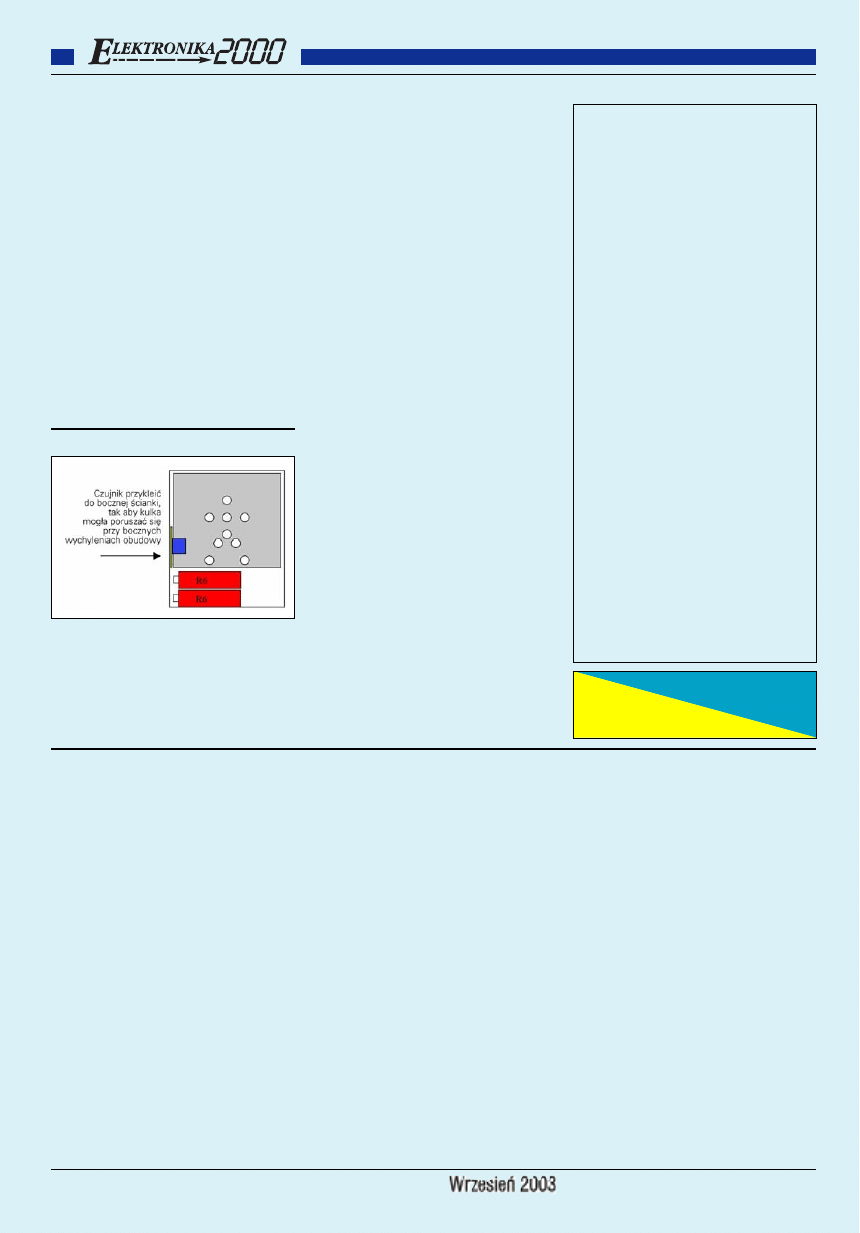
celu do blaszki piezo o średnicy 5cm przy-
klejamy denko po „elektrolicie” z umie-
szczoną w środku metalową kulką. Dobre
efekty daje obudowa o średnicy około 10mm
i metalowa kulka o średnicy 5mm. Ważne
jest, aby obudowa po elektrolicie nie była za
głęboka. Wtedy kulka nie nadąży przemie-
szczać się od dna obudowy do powierzchni
blaszki. Optymalną wydaje się być obudowa
o głębokości 12mm. Problem z przemie-
szczaniem może też wystąpić gdy metalowa
kulka będzie zbyt ciężka (czyt. o dużo więk-
szej średnicy). Tak wykonany czujnik może-
my od razu sprawdzić. Dołączamy multimetr
do przewodów odchodzących od blaszki
i przechylamy czujnik na boki. Multimetr,
mimo że jest powolny, powinien wskazać
wyraźne skoki napięcia o amplitudzie co naj-
mniej 1V. Jeszcze łatwiej sprawdzić czujnik
przy użyciu oscyloskopu.
Gdy posiadamy już czujnik, możemy za-
brać się za montaż elementów na płytce dru-
kowanej pokazanej na rysunku 3. Rozpo-
czynamy od zworek i podstawek pod układy
scalone, a kończymy na złączkach i włożeniu
układów w podstawki. Dołączamy do układu
napięcie zasilania 3V i przechylamy czujnik
na boki, symulując ruch. Powinniśmy uzy-
skać naprzemienne mruganie diod zielo-
nych/czerwonych. Gdyby tak nie było,
a czujnik ruchu został sprawdzony po zmon-
towaniu, przyczyny należy szukać w czułości
bramki U1A. W pierwszej kolejności należy
próbować zmienić wartości R1 lub R2. Rezy-
stancje te należy tak dobrać, aby napięcie na
wejściu U1A było nieco poniżej napięcia
przełączania bramki. W ostateczności należy
wymienić układ U1 lub zbudować nowy
czujnik. Jest to skrajność, wykonałem kilka
takich czujników i mimo że nie miały iden-
tycznej czułości, to bez problemu można je
było zaadaptować do układu. Na koniec po-
zostaje nam sprawdzić układ podtrzymywa-
nia sygnalizacji. Po kilku ruchach czujnikiem
pozostawiamy układ w spokoju. W tym mo-
mencie powinny zacząć mrugać tylko diody
czerwone, a po 3 minutach układ całkowicie
„zamilknie”. Szybkość mrugania diod w tym
trybie można zwiększyć 2 razy, przełączając
się z wyjścia Q7 na Q6 w układzie 4060. Po-
prawi to widoczność, jeśli zawiesimy nasze-
go krokoludka na rowerze.
Sprawdzony układ należy zamknąć
w obudowie, najlepiej plastykowej z prze-
grodą na dwa paluszki. Pod diody należy wy-
wiercić otwory, ewentualnie zamiast przed-
niej ścianki obudowy zamontować szybkę
z przezroczystej pleksi. Czujnik należy przy-
kleić do jednej ze ścianek obudowy, tak jak
pokazano to na rysunku 4. Aby układ praco-
wał prawidłowo, musimy pozwolić mu na
ruch. Dobrym rozwiązaniem wydaje się za-
wieszenie całej obudowy na 10cm łańcuszku,
takim jak np. na klucze, i przypięcie całości
do tornistra.
Michał Stach
54
Elektronika dla Wszystkich
Wykaz elementów
Rezystory
R1 . . . . . . . . . . . . . . . . . . . . . . . . . .2,2MΩ
R13,R16 . . . . . . . . . . . . . . . . . . . . . . . .10Ω
R2 . . . . . . . . . . . . . . . . . . . . . . . . . .1,5MΩ
R3,R8,R11,R14 . . . . . . . . . . . . . . . . . .10kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R5 . . . . . . . . . . . . . . . . . . . . . . . . . . .100Ω
R6,R10 . . . . . . . . . . . . . . . . . . . . . . .4,7kΩ
R7,R9,R12,R15 . . . . . . . . . . . . . . . . .100kΩ
Kondensatory
C1 . . . . . . . . . . . . . . . . . .100nF ceramiczny
C2 . . . . . . . . . . . . . . . . . . . . . . .1000µF/9V
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . .10nF
C4,C7 . . . . . . . . . . . . . . . . . . . . . . . .100nF
C5,C6 . . . . . . . . . . . . . . . . . . . . . . . . . .1µF
C8 . . . . . . . . . . . . . . . . . . . . . . . . . . .470nF
Półprzewodniki
D1,D12 . . . . . . . . . . . . . . . . . . . . . .1N4148
D2-D11 . . . . . . . . . . . . . . .LED dwukolorowa
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . .BC547
T2,T3 . . . . . . . . . . . . . . . . . . . . . . . .BC327
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . .4093
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .4060
Pozostałe
J2 . . . . . . . . . . . . . . . . . . . . . .blaszka piezo
KKoom
mpplleett ppooddzzeessppoołłóóww zz ppłłyyttkkąą
jjeesstt ddoossttęęppnnyy ww ssiieeccii hhaannddlloowweejj AAVVTT
jjaakkoo kkiitt sszzkkoollnnyy AAVVTT-22661133
Rys. 4
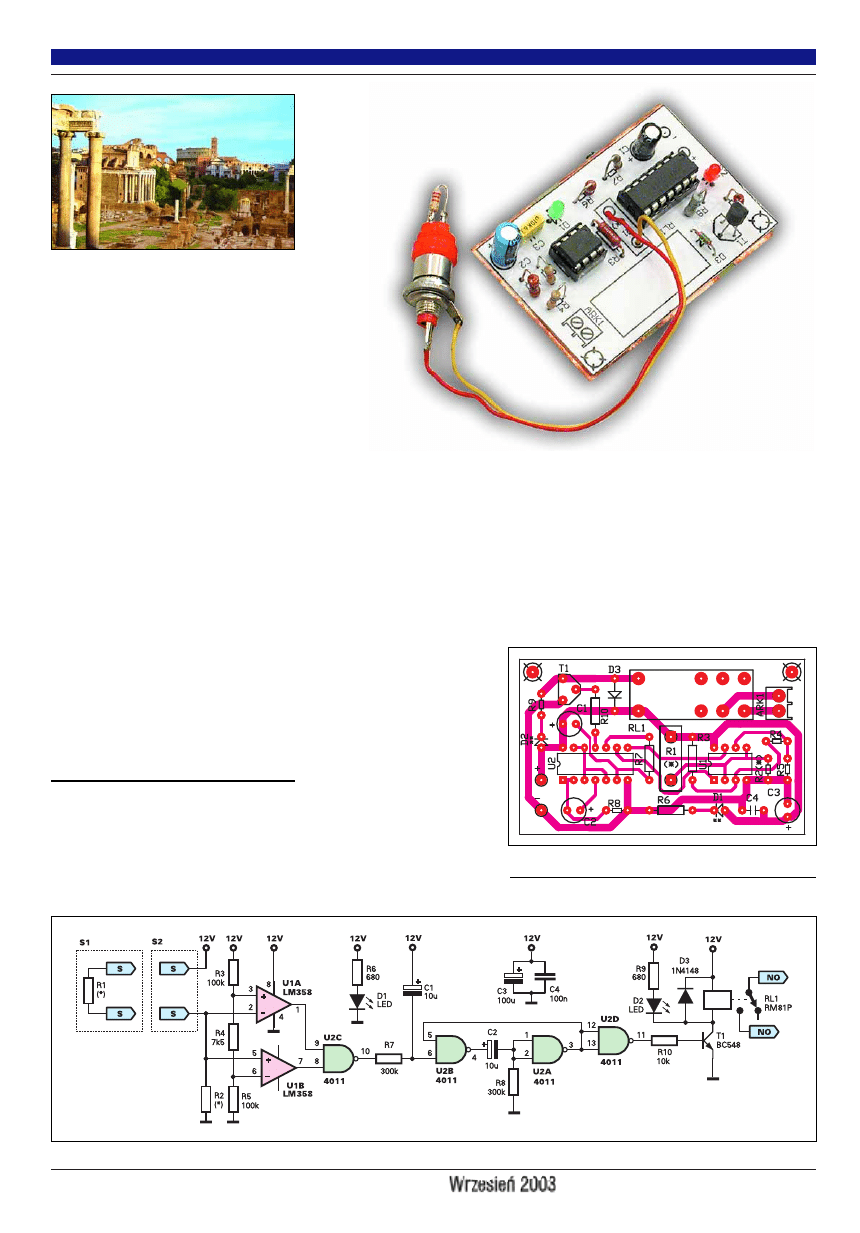
56
Elektronika dla Wszystkich
Analogowy zamek szyfrowy? – takiego dzi-
woląga chyba jeszcze nikt nie widział! Czas
więc to nadrobić i udowodnić, że w elektro-
nice nie ma rzeczy niemożliwych, a układy
w Elektronice dla Wszystkich są tego najlep-
szym dowodem.
Opisany zamek charakteryzuje się prostą
budową i składa się z tanich i łatwo dostęp-
nych elementów. Można go zbudować w kil-
kanaście minut. Otwarcie zamka polega na
przyłożeniu do czytnika klucza szyfrowego.
Ze względu na sposób szyfrowania, zamek
ten przeznaczony jest głównie do ochrony
szafek i szuflad biurkowych, gdzie bezpie-
czeństwo oferowane przez niego nie musi
być najwyższych lotów. Niemniej zapewnia
on na tyle wysoki poziom bezpieczeństwa, że
osoby nieznające zasady jego działania i bę-
dące elektronicznymi analfabetami nie będą
w stanie go otworzyć.
Opis układu
Schemat ideowy zamka przedstawiony jest
na rysunku 1. Wzmacniacze operacyjne
U1A i U1B pracują jako tzw. dyskryminator
okienkowy. Brzmi to poważnie, ale zasada
działania jest bardzo prosta. Gdy napięcie na
nóżce 2 i 5 jest takie samo jak na nóżce 3 i 6
– wyjścia wzmacniaczy operacyjnych prze-
chodzą w „stan wysoki”. Rezystor R4 wpro-
wadza swoistą histerezę, czyli tolerancję dla
porównywanych napięć. Jest to konieczne,
ponieważ zastosowane rezystory mają tole-
rancję 5%. Wartości rezystorów R1 i R2 są
takie same, dobierane indywidualnie przez
użytkownika. W modelu mają one wartość
22k
Ω. Wybierając ich wartość, dokonujemy
jednocześnie wyboru klucza otwierającego
zamek.
Gdy rezystor R1 będący klu-
czem będzie miał taką samą war-
tość jak rezystor R2, na wyj-
ściach wzmacniaczy operacyj-
nych U1A i U1B pojawią się
równocześnie stany wysokie.
Spowoduje to przejście wyjścia
bramki U2C w stan niski.
Elementy C1 i R7 pełnią bar-
dzo ważną rolę. Stan wysoki na
wyjściu bramki musi utrzymy-
wać się przez jakieś 2 sekundy.
Tyle czasu potrzeba na naładowa-
nie kondensatora C1 do poziomu
przełączenia się bramki U2B.
Eliminuje to prosty chwyt na otwarcie zamka
przez ładujący się kondensator i sprawia wra-
żenie, że zamek po włożeniu klucza „myśli”
sprawdzając kod klucza.
Gdy klucz „pasuje” do zamka, kondensa-
tor C1 zostanie naładowany i zadziała prze-
rzutnik monostabilny zbudowany na bram-
kach U2B i U2A. Załączy on przekaźnik
RL1 sterujący ryglem na prawie 2 sekundy.
Czas ten wyznaczają wartości elementów C2
i R8. Proces otwierania zamka sygnalizowany
FF
FF
oo
oo
rr
rr
uu
uu
m
m
m
m
CC
CC
zz
zz
yy
yy
tt
tt
ee
ee
ll
ll
nn
nn
ii
ii
kk
kk
óó
óó
w
w
w
w
AA
AA
nn
nn
aa
aa
ll
ll
oo
oo
gg
gg
oo
oo
w
w
w
w
yy
yy
zz
zz
aa
aa
m
m
m
m
ee
ee
kk
kk
ss
ss
zz
zz
yy
yy
ff
ff
rr
rr
oo
oo
w
w
w
w
yy
yy
Rys. 2 Schemat montażowy
Rys. 1 Schemat ideowy
57
Forum Czytelników
Elektronika dla Wszystkich
jest przez zaświecenie diody D2. Dioda D1
świeci cały czas, sygnalizując zasilanie ukła-
du.
Montaż i uruchomienie
Na początek miła wiadomość. Układ nie wy-
maga uruchamiania i działa od razu po zmon-
towaniu. Oczywiście warunkiem zadziałania
jest użycie sprawnych elementów i uniknię-
cie pomyłek przy montażu. Rozmieszczenie
elementów na płytce przedstawia rysunek 2.
Lutowania elementów dokonujemy według
znanych reguł, tzn. od elementów najmniej-
szych do największych.
Programowanie zamka ogranicza się do
wyboru wartości pary elementów R1, R2, przy
założeniu, że R1 = R2. W modelu rezystory te
mają wartość 22k
Ω, ale mogą się zawierać
w przedziale 300
Ω - 510kΩ. Są to wartości
bezpieczne, z przedziału których możemy
wybrać dowolną wartość. Zastosowanie rezy-
storów o wartości spoza podanych granic jest
nie wskazane. Jeżeli ktoś by chciał ominąć
wartości z szeregu E24, może zastosować parę
rezystorów precyzyjnych lub nawet dwa po-
tencjometry montażowe z ustawioną „niestan-
dardową” wartością rezystancji (spoza szeregu
E24).
Rezystora R1 nie montujemy na płytce,
tylko we wtyku typu chinch. W miejsce ozna-
czone na płytce R1 lutujemy na dwóch prze-
wodach gniazdo chinch. Będzie ono czytni-
kiem klucza, czyli wtyku. Wybranie właśnie
złącza chinch, a nie np. jack, podyktowane
jest obiektywnymi względami. Jest ono zde-
cydowanie bardziej odporne na uszkodzenia
mechaniczne od złącza typu jack, a przy tym
charakteryzuje się niską ceną.
Dariusz Drelicharz
dariuszdrelicharz@interia.pl
Wykaz elementów
Rezystory
R1,R2 . . . . . . . . . . . . . . . . . . . . . .22kΩ (patrz tekst)
R3,R5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100kΩ
R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7,5kΩ
R6,R9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .680Ω
R7,R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .300kΩ
R10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
Kondensatory
C1,C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/16V
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100µF/16V
C4 . . . . . . . . . . . . . . . . . . . . . . . . .100nF ceramiczny
Półprzewodniki
D1,D2 . . . . . . . . . . . . . . . . . . . .LED, dowolne kolory
D3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4148
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM358
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4011
T1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC548
Inne
RL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .RM81P
S1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Wtyk cinch
S2 . . . . . . . . . . . . . . . . . . . . . . . . . . .Gniazdo chinch
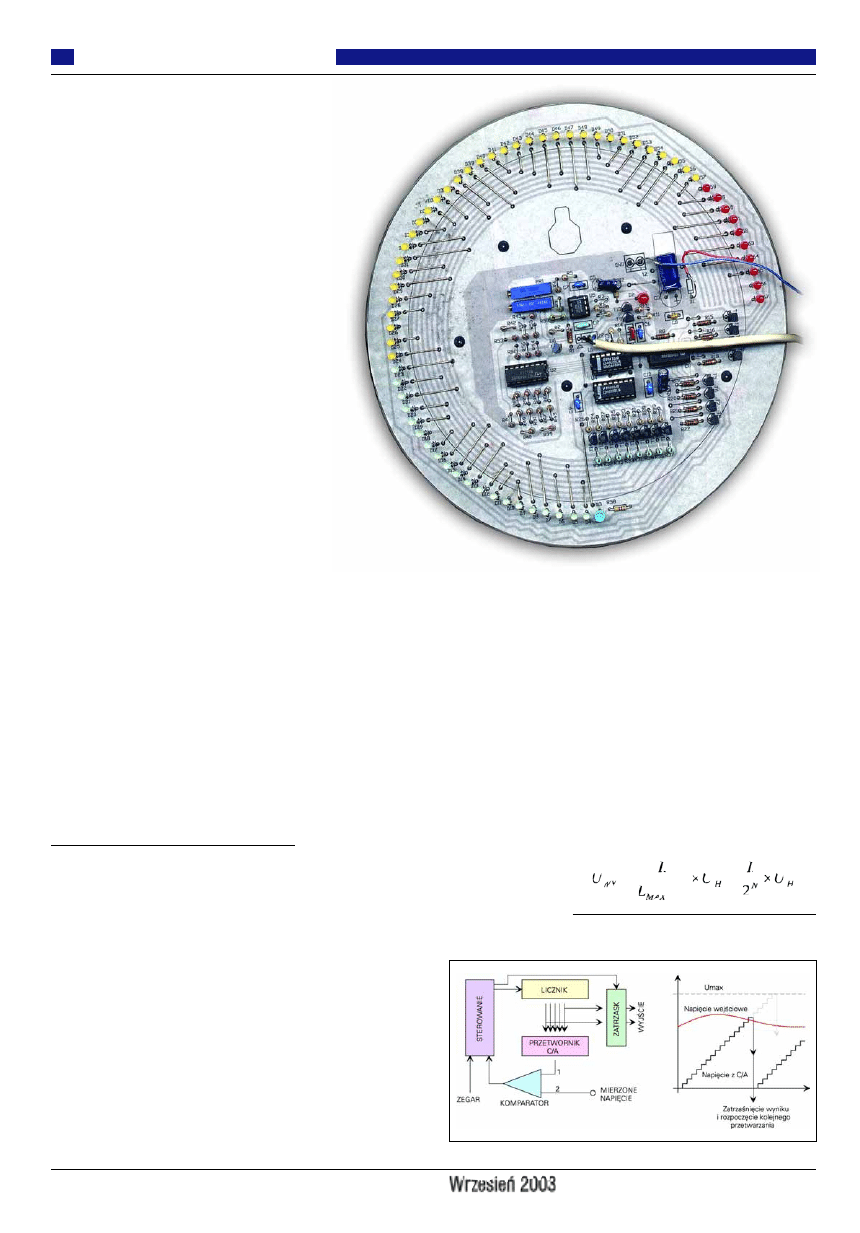
58
Elektronika dla Wszystkich
Prezentowany układ jest niczym innym jak
najzwyklejszym termometrem, mającym
służyć, w zamierzeniu autora, pomiarowi
temperatury panującej na dworze. To, co
wyróżnia tę konstrukcje od innych, to rezy-
gnacja z klasycznego w wypadku ter-
mometrów elektronicznych cyfrowego
wyświetlacza na rzecz układu linijki
diodowej symulującej tradycyjny termometr
analogowy (czytaj rtęciowy, a raczej alko-
holowy). Czytelnikom należy się jedno
wyjaśnienie. Podobna konstrukcja była już
prezentowana na łamach EdW przez pana
Zbigniewa Raabe. Muszę przyznać, że
właśnie układ pana Zbigniewa był inspiracją
dla mojej konstrukcji. Pierwszą zasadniczą
różnicą między konstrukcjami jest pomiar
temperatur ujemnych przez prezentowany
termometr. Konstrukcja pana Zbigniewa
została zaprezentowana w EdW 8/2001,
kiedy to matka natura umożliwiła nam wczu-
cie się w sytuację kurczaka przypiekanego w
kuchence mikrofalowej. Właśnie towarzy-
sząca temperaturze +35
o
C tęsknota za jakże
wówczas odległym białym puchem i nieco
normalniejszą temperaturą doprowadziła do
kategorycznego postanowienia, że termometr
MUSI mierzyć temperatury ujemne...
Opis układu
Postulat pomiaru temperatur ujemnych łatwo
zrealizować, wykorzystując układ LM335.
Element ten dostarcza napięcia proporcjonal-
nego do temperatury. Dla 0
o
C napięcie wyj-
ściowe wynosi typowo 2,73V i rośnie w
przybliżeniu o 10mV na każdy stopień.
Ponieważ układ powinien mierzyć temper-
atury od powiedzmy -20
o
C do około 40
o
C,
otrzymujemy 61 poziomów mierzonej tem-
peratury, 61 diod świecących oraz 61 kom-
paratorów, które... Stop! Taka realizacja
układu wymaga 16 poczwórnych kompara-
torów, które w sumie stworzą bardzo ele-
gancki, niezwykle szybki przetwornik ana-
log-cyfra typu flash. A gdyby tak zbudować
układ w oparciu o koncepcje przetwornika
kompensacyjnego? Schemat blokowy
takiego przetwornika przedstawia rysunek 1.
Jak widać, układ składa się z jednego kom-
paratora, który steruje pracą licznika i
towarzyszącego mu zatrzasku przechowu-
jącego wartość ostatniego pomiaru. Z
licznikiem współpracuje ponadto
przetwornik cyfra-analog dostarczający
napięcie odpowiadające liczbie pokazanej
przez licznik. Napięcie to jest porównywane
z napięciem mierzonym przez komparator.
Na pozór taka topologia jest bardziej skomp-
likowana od przetwornika typu flash, jednak
okazuje się, że wykonanie w praktyce
zespołu precyzyjnych i do tego szybkich
komparatorów w połączeniu z szeregiem
źródeł napięć odniesienia wcale nie jest takie
proste. Scalone przetworniki A/C często są
wykonywane z wykorzystaniem mody-
fikowanej topologii przetwornika kompen-
sacyjnego. Zamiast teoretyzować,
przyjrzyjmy się schematowi przedstawione-
mu na rysunku 2. Sercem układu jest
l i c z n i k - g e n e r a t o r
CD4060. Elementy
R13, R14 i C1 wraz z
dwoma inwerterami
zaszytymi w struk-
turze układu tworzą
generator, który
dostarcza sygnał
zegarowy dla licznika.
Dla podanych wartości
elementów sygnał
zegarowy ma częs-
totliwość około
30kHz. Z licznika wykorzystałem sześć
najmłodszych bitów podzielonych na dwie
grupy: trzech młodszych i trzech starszych
bitów, ale o tym za chwilę. Licznik liczy w
kółko: 000000b, 000001b...111110b,
111111b, 000000b i tak dalej. Jak już wiemy,
generowane przez licznik kolejne liczby
należałoby zamienić na napięcie w
przetworniku C/A. Konwersji tej dokonuje
19 rezystorów tworzących układ tzw. drabin-
ki R-2R lub jak wolą niektórzy odwrotnej
drabinki R-2R. Układ drabinki jest dokład-
niej omówiony w ramce.
Tutaj wystarczy informacja, że napięcie
wyjściowe drabinki (które w układzie jest
dostępne w węźle łączącym R57 i R43) jest
określone wzorem:
T
T
e
e
r
r
m
m
o
o
m
m
e
e
t
t
r
r
k
k
o
o
ł
ł
o
o
w
w
y
y
Rys. 1 Schemat blokowy przetworni-
ka kompensacyjnego
Forum Czytelników
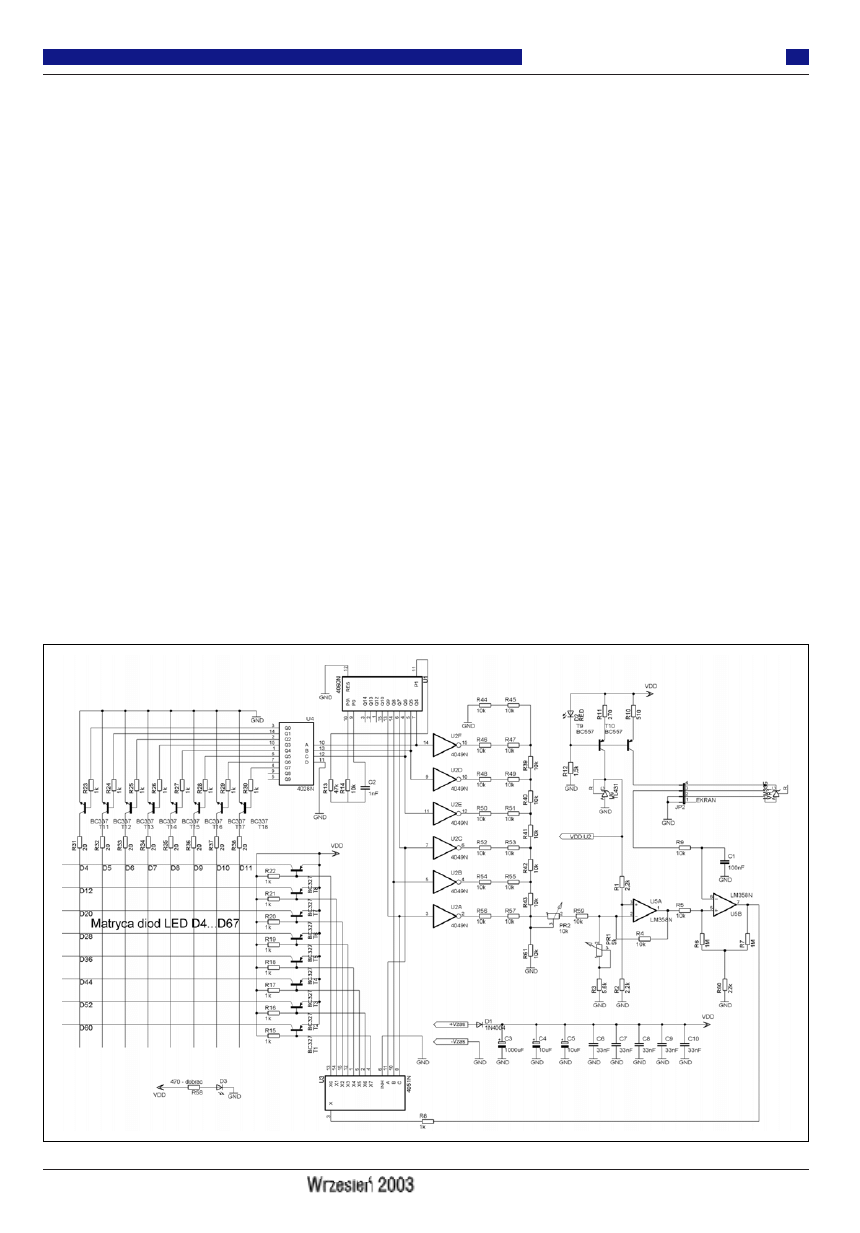
Powyższy wzór powstał w wyniku prze-
kształcenia wzoru zamieszczonego w ramce
i nie uwzględnia wpływu obciążenia drabinki.
L to liczba poddana przetworzeniu, nato-
miast L
MAX
to maksymalna możliwa do prze-
tworzenia liczba (dla przetwornika sześciobi-
towego jest to oczywiście 63). Napięcie wyj-
ściowe jest proporcjonalne do U
H
- napięcia
zasilającego wejścia drabinki w stanie lo-
gicznej jedynki, w stanie logicznego zera po-
danego na dane wejście napięcie wynosi 0V.
I jest to podstawowe nieszczęście. Najprost-
szym rozwiązaniem byłoby dołączenie dra-
binki do wyjść licznika, wówczas napięcia
podane na wejścia drabinki wynosiłyby albo
0V (stan niski), albo V
DD
(stan wysoki), ale
po pierwsze – wymagałoby to zasilenia w za-
sadzie całego układu stabilizowanym napię-
ciem, po drugie – licznik sterować będzie je-
szcze innymi układami, przez co napięcia pa-
nujące na poszczególnych wyjściach mogły-
by być różne, po trzecie – drabinka w różnym
stopniu obciąża poszczególne źródła – pożą-
dane jest, aby charakteryzowały się one moż-
liwie małą rezystancją wyjściową. Dlatego
też zastosowałem układ U2 – CD4049UB
składający się z sześciu inwerterów. Układ ten
poza buforowaniem wyjść U1 (i negacją) peł-
ni dodatkowo niezwykle ważną funkcję kon-
wertera poziomów logicznych. Układ U2 zasi-
lany jest napięciem referencyjnym wytwarza-
nym przez U6 TL431. Napięcie to wynosi
2,5V. Jest to wartość mniejsza niż minimalna
gwarantująca pracę układów rodziny
CD4XXX. Dodatkową zaletą układu CD4049
jest większa niż standardowa dla tej rodziny
wydajność prądowa wyjść, co zmniejsza błąd
przetwornika. Praktyka pokazała, że w tak
nietypowych warunkach układ ten sprawuje
się znakomicie. Należy jednak zaznaczyć, że
układ ten musi być w wersji UB (unbuffe-
red). Nigdy nie spotkałem wersji B, której
budowa opiera się na kaskadzie trzech inwer-
terów, jednak między innymi firma Philips
przyznaje się do produkcji układów w tej
drugiej wersji. Niestety sygnał dostarczony
przez taki przetwornik musi być poddany
konwersji, tak aby kolejne progi odpowiada-
ły temperaturze mierzonej przez czujnik U7.
Konwersja dokonuje się z wykorzystaniem
jednego z dwóch wzmacniaczy wchodzących
w skład U5 – LM358. Układ konwersji jest
zasadniczo wzmacniaczem odwracającym
(wzmacniacz operacyjny plus rezystory R4,
R59 oraz PR2). Dzielnik R1, R2 wymusza na
wejściu nieodwracającym napięcie około
1,25V (połowa napięcia odniesienia dostar-
czanego przez U5 - TL431). Na wejściu od-
wracającym wzmacniacza musi panować na-
pięcie niemalże identyczne z napięciem po-
danym na wejście nieodwracające. Oznacza
to, że poprzez R3, PR1 płynie stały prąd za-
leżny tylko od wartości rezystancji tych ele-
mentów - prąd ten powoduje przesunięcie
tzw. zera przetwornika - podanie na wejście
liczby 000000b powoduje wygenerowanie
napięcia o wartości innej od 0V - w naszym
układzie liczba 000000b odpowiada tempe-
raturze około -20
o
C, tak więc napięcie wyj-
ściowe przetwornika powinno wynosić mniej
więcej 2,53V. PR1 służy właśnie do przesu-
nięcia zera przetwornika, jednak regulacja
PR2 również prowadzi do niewielkiego prze-
sunięcia wartości tego poziomu! PR2 ustala
zasadniczo zakres przetwarzania. Takie roz-
wiązanie nie wróży prostej kalibracji, jednak
na pocieszenie informuję, że już po dziesię-
ciu kolejnych korekcjach układ pracuje po-
prawnie. Uzyskany na wyjściu 1 U5 sygnał
jest podany na wejście „+” drugiego wzmac-
niacza pełniącego rolę komparatora. Elemen-
ty R6, R7 i R60 wprowadzają niewielką hi-
sterezę. W praktyce okazało się, że układ
pracuje równie dobrze bez nich. Na wejście
„–” komparatora podany jest sygnał z prze-
twornika LM335 za pośrednictwem prostego
filtru dolnoprzepustowego R9, C2. Filtr zapo-
biega przenikaniu do układu zakłóceń mogą-
cych indukować się w przewodach łączących
czujnik z układem. Dopóki sygnał z czujnika
jest większy od napięcia podanego przez
przetwornik, na wyjściu komparatora panuje
stan niski – przez rezystor R8 i jeden z kluczy
analogowych wchodzących w skład multiple-
ksera analogowego (U3 – CD4051) płynie
wówczas prąd bazy jednego z tranzystorów
T1-T8. Rezystory R15-R22 podciągają bazy
tranzystorów do plusa zasilania (nieaktywne
wyjścia multipleksera charakteryzują się
59
Forum Czytelników
Elektronika dla Wszystkich
Rys. 2 Schemat ideowy
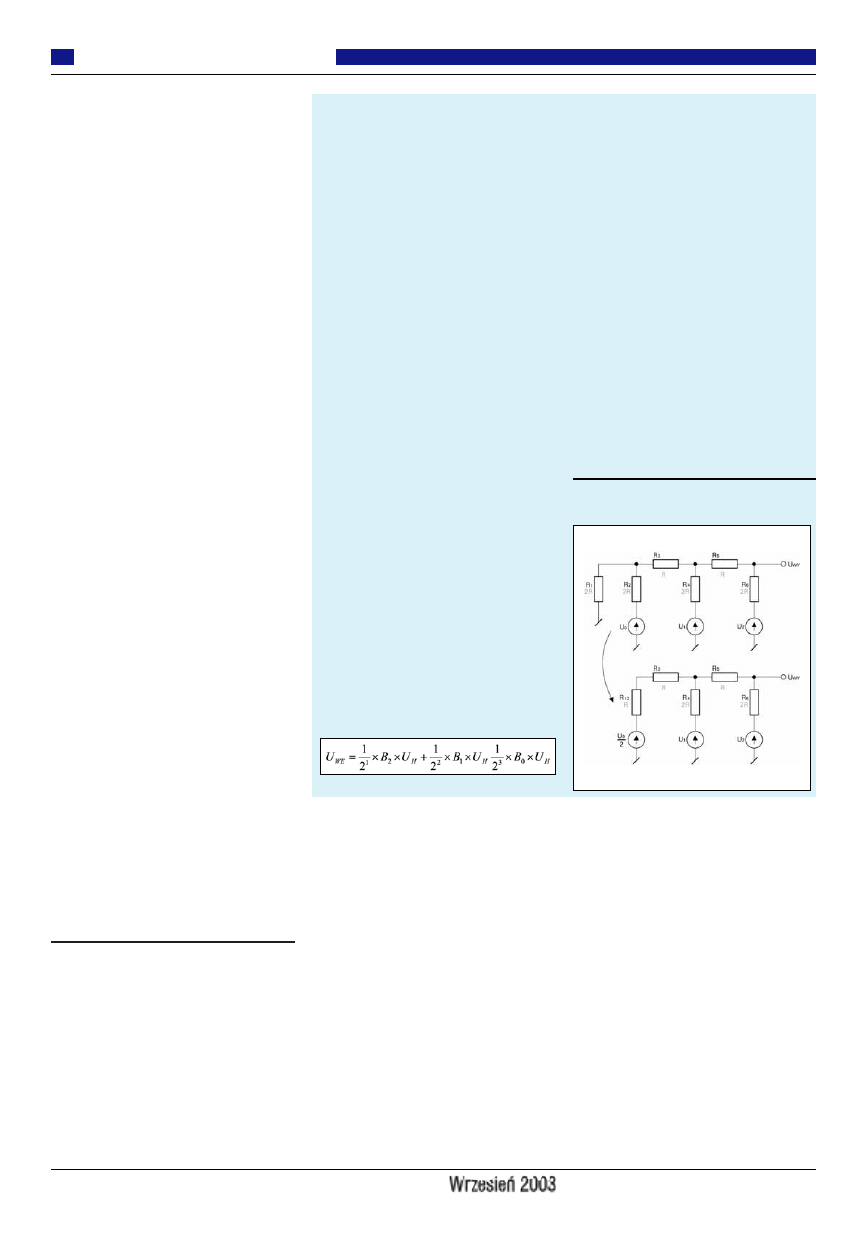
wysoką impedancją wyjściową). Układ U3
jest sterowany trójką starszych bitów licznika
U1. Młodsza trójka steruje układem dekodera
BCD na 1 z 10 CD4028 – U2. Układ ten ste-
ruje kolejną ósemką tranzystorów T11-T17
poprzez rezystory R23...R30. Układy U2 i U3
adresują kolejne diody połączone w matrycy
8*8. Rezystory R31-R37 ograniczają prąd
diod LED. Diody są zapalane kolejno po-
cząwszy od D4 aż do... momentu, gdy napię-
cie podawane przez przetwornik C/A prze-
kroczy napięcie wyjściowe czujnika tempera-
tury. Wówczas komparator zmieni stan na
wysoki, uniemożliwiając tym samym pracę
tranzystorów z grupy T1-T7 – od tej chwili
diody pozostają wygaszone. Na wyświetlaczu
uzyskaliśmy wskazanie aktualnie panującej
temperatury. Wadą tego rozwiązania jest to,
że w każdym momencie świeci tylko jedna
dioda. Aby uzyskać rozsądne jasności, trzeba
zastosować naprawdę wydajne diody. W pro-
totypie doskonale funkcjonowały 3mm diody
o podwyższonej jasności firmy LITE-ON
pracujące z impulsowym prądem około
160...180mA, co daje średni pobór prądu
3mA na diodę. Prototypowy układ pobierał
około 200mA prądu przy zapalonych wszyst-
kich diodach. Układ był zasilany z niestabili-
zowanego zasilacza wtyczkowego, napięcie
zasilające nie powinno być mniejsze od 6V.
Aby poprawić stabilność, zarówno źródło na-
pięcia odniesienia, jak i czujnik temperatury
są zasilane z prostego źródła prądowego.
Układ elementów D2 (LED) i R12 pozwala
na polaryzację baz tranzystorów T9, T10
w miarę stałym napięciem około 1,6V (zależ-
nym w dużym stopniu od typu zastosowanej
diody LED). Na rezystorach R10 i R11 panu-
je napięcie identyczne z napięciem na diodzie
D2 pomniejszonym o spadek napięcia na złą-
czu baza-emiter tranzystorów. Skoro napięcie
na rezystorach jest prawie stałe i rezystancja
rezystorów też jest prawie stała, to można
przyjąć, że i prądy płynące przez te elementy
są prawie stałe. A ponieważ tranzystory mają
na ogół wzmocnienie większe od 100, toteż
prądy baz są małe, prąd kolektora to prawie
prąd emitera i tak oto mamy dwa źródła prą-
du zasilające wspomniane elementy. Ciekawe
tylko, czy układ faktycznie działa, czy tylko
prawie? Aby się o tym przekonać, należy
przystąpić do kolejnej fazy, czyli:
Montaż i uruchomienie
Zanim przystąpimy do montażu układu, zale-
cam nabyć szpulkę srebrzanki, której poważ-
ny odsetek spożytkujemy na zworki (łączna
długość zworek jest bliska 1m). Dla odmiany
nie zalecam hurtowego nabywania diod LED,
elementy te naprawdę powinny być dobrej ja-
kości, najlepiej dyfuzyjne (obudowa wykona-
na z „matowego”, rozpraszającego plastiku)
o podwyższonej jasności. Najlepszym roz-
wiązaniem będzie chyba nabycie najpierew
kilku sztuk i ich wypróbowanie.
Układ można zmontować na płytce dru-
kowanej, pokazanej na rysunku 4. Montaż
przebiega klasycznie: najpierw zworki,
później podstawki pod układy scalone, rezy-
story, tranzystory. Może się okazać, że rezy-
story R31-R38 będą wymagać korekty war-
tości - wszystko zależy od napięcia zasilania
oraz możliwości zastosowanych diod. Proto-
typ cały czas zasilany był z prostego niesta-
bilizowanego zasilacza wtyczkowego o wy-
dajności 350mA na zakresie 6V. Napięcie
zasilające wahało się od 7,5V do 6,5V, a mi-
mo to układ pracował stabilnie. Dioda LED
D3 jest umieszczona na początku skali -
w prototypie była to dioda niebieska-ultraja-
sna, zastosowanie innego koloru na pewno
pociągnie za sobą zmianę wartości R58. Na
końcu montujemy kondensatory, C3 ze
względu na duże gabaryty warto wmonto-
wać „na leżąco”. Wartości pojemności
kondensatorów C6-C10 nie są krytyczne,
akurat miałem pod ręką 33nF, gdybym miał
np. 100nF, wówczas spis elementów byłby
nieco inny.
Rezystory zastosowane w drabince prze-
twornika powinny charakteryzować się tole-
rancją 1%. Czujnik temperatury można
podłączyć przewodem ekranowanym, w pro-
totypie zastosowałem czteroprzewodową,
nieekranowaną skrętkę o długości około 1m.
Sam czujnik należy zabezpieczyć przed
wpływem wilgoci. W najprostszej wersji na
czujnik nakładamy koszulkę termokurczliwą,
następnie całość kilkakrotnie zanurzamy
w kleju typu Distal - w efekcie otrzymamy
hermetyczny koralik. Na montaż 65 diod
LED niestety nie mam recepty, osobiście naj-
pierw przylutowywałem każdą diodę tylko
jedną nóżką, następnie lutując drugą, stara-
łem się uzyskać w miarę równomierne
60
Forum Czytelników
Elektronika dla Wszystkich
Na rysunku 3 został przedstawiony układ trzy-
bitowego przetwornika C/A zbudowanego
z wykorzystaniem drabinki R-2R. Źródła na-
pięcia mogą dostarczać jednego z dwóch na-
pięć: U
H
lub U
L
. W najprostszym przypadku
mogą to być wyjścia układu cyfrowego, jak to
ma miejsce w układzie termometru. Przepro-
wadźmy prostą analizę układu. Ograniczając
nasze rozważania do elementów R
1
,R
2
oraz U
0
można zauważyć, że obwód ten można zastąpić
źródłem napięcia o szeregowej rezystancji
R
12
=R. Zmianie uległy również napięcia poda-
wane do układu przez źródło, wynoszą teraz
0,5U
H
oraz 0,5U
L
. Abstrahując od obecności
w układzie źródeł U1 oraz U2 (przyjmijmy, że
ich napięcia wynoszą 0V), możemy postąpić
o krok dalej. Rezystory R
12
, R
3
oraz R
4
tworzą
kolejny dzielnik napięcia – dokonując prze-
kształcenia otrzymujemy kolejne zastępcze
źródło napięcia o rezystancji wyjściowej
R
1234
=R(!) i napięciu 0,25U
H
lub 0,25U
L
. Po-
stępując dalej, otrzymamy ostatecznie źródło
zastępcze o rezystancji R
WY
=R i napięciu wyj-
ściowym 0,125U
H
lub...
A teraz zajmijmy się U
1
(niech U
0
,U
2
=0V).
Źródło to ma rezystancję wyjściową R
4
=2R
oraz widzi rezystancję R
123
=2R – znów dziel-
nik napięcia – ostatecznie przekształcamy do
źródła o rezystancji wyjściowej R
1234
=R(!)
i napięciu 0,5U
H
lub 0,5U
L
. Postępując jak dla
U
0
otrzymamy ostatecznie źródło o rezystancji
wyjściowej R i napięciu 0,25U
H
lub 0,25U
L
.
Zauważmy że napięcia wnoszone do układu
przez U1 są dwa razy większe od tych wnoszo-
nych przez U
0
. Jak można się już domyślić, U2
będzie tworzyło źródło o napięciu 0,5U
H
lub
0,5U
L
. Korzystając z zasady superpozycji
otrzymujemy wzór na napięcie wyjściowe ca-
łego układu:
gdzie B
2
, B
1
, B
0
to stany poszczególnych
źródeł (0 lub 1, czyli B to trzybitowa liczba).
Powyższy wzór jest słuszny, jeżeli U
L
=0V. Re-
zystancja wyjściowa układu wynosi oczywi-
ście R. Teoretycznie układ można rozbudowy-
wać, tworząc przetworniki o coraz większej
rozdzielczości. Na przeszkodzie stoi jednak
dokładność wykonania rezystorów oraz jakość
źródeł napięcia. Stosując rezystory o tolerancji
1% praktycznym kresem możliwości układu
jest przetwornik siedmiobitowy. Przetwornik
ośmiobitowy wykonany z wykorzystaniem ta-
kich rezystorów miałby już błąd (potencjalnie)
większy od 1LSB. Układ jest najwrażliwszy
na odchyłki rezystorów współpracujących
z „najstarszym” źródłem (sterowanym najstar-
szym bitem). Zastosowany w termometrze
sześciobitowy przetwornik nie powinien spra-
wiać kłopotów, choć w prototypie błąd prze-
twornika powstały pomiędzy stanami
011111b a 100000b był już wyraźnie widocz-
ny(obserwacja oscyloskopowa).
Rys. 3 Układ trzybitowego
przetwornika C/A
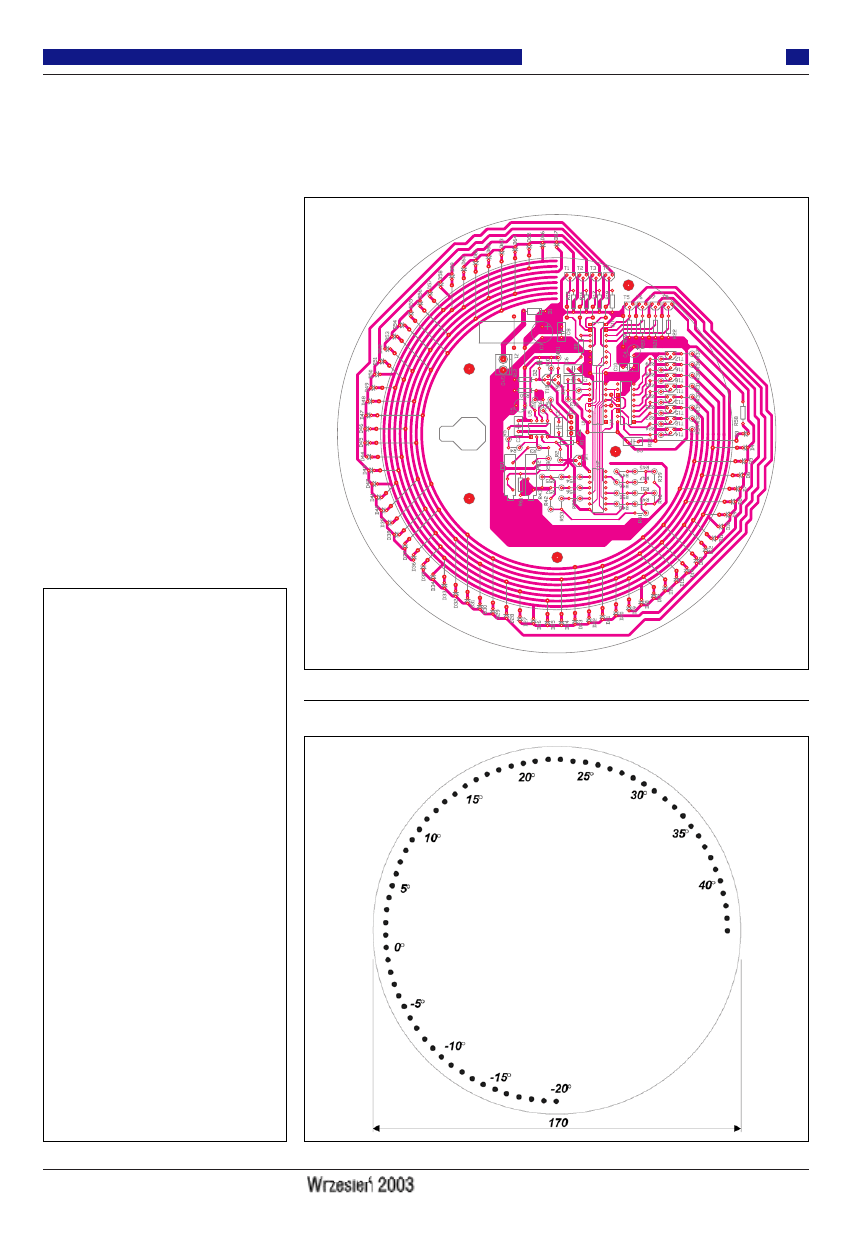
rozmieszczenie diod. Skala do termometru
przedstawiona została na rysunku 5.
Uruchomienie zalecam przeprowadzić
z wykorzystaniem zasilacza laboratoryjnego
(najlepiej z ograniczeniem prądowym). Dzia-
łanie układu powinno się objawić świece-
niem przynajmniej diod D2 i D3. Do kalibra-
cji termometru musimy dysponować odrobi-
ną cierpliwości, małym śrubokrętem, termo-
metrem, szklanką wody z lodem oraz pomie-
szczeniem z tzw. temperaturą pokojową we-
wnątrz (można zastąpić szklanką ciepłej wo-
dy). Najpierw umieszczamy czujnik tempe-
ratury w mieszaninie wody z lodem, a poten-
cjometry w miarę możliwości ustawiamy
w środkowym położeniu. Czujnik LM335
ma dość długi czas odpowiedzi i to bez do-
datkowych koralików z żywicy epoksydo-
wej, toteż na ustalenie się wyniku po każdej
zmianie temperatury musimy poczekać oko-
ło 2..3 minut. Dla mieszaniny wody z lodem
kręcąc potencjometrami powinniśmy uzy-
skać świecenie się diody przypisanej do 0
o
C.
Następnie zmieniamy środowisko czujni-
ka. Jeśli wskazanie mimo wstępnej regulacji
jest niepoprawne, to około połowę błędu kom-
pensujemy jednym potencjometrem, połowę
drugim. Następnie powracamy do wody z lo-
dem. Teraz korygujemy, używając tylko PR1
i ponownie zmieniamy temperaturę, przepro-
wadzając korekcję tak jak za pierwszym razem.
Po 10 próbach powinno być dobrze. I to by by-
ło na tyle. Zaprojektowana przeze mnie skala
zakłada 0
o
C na diodzie D23. Problem obudowy
pozostawiam do rozstrzygnięcia ewentualnym
naśladowcom we własnym zakresie.
Grzegorz Bywalec
61
Forum Czytelników
Elektronika dla Wszystkich
Rys. 4 Schemat montażowy (skala 50%)
Rys. 5 Skala do termometru (skala 50%)
Wykaz elementów
Rezystory
R1,R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2,2kΩ
R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5,6kΩ
R4,R9,R14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ
R5, R60* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .22kΩ
R6*, R7* . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1MΩ
R10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .510Ω
R11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .270Ω
R12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1,5kΩ
R13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .47kΩ
R15-R30,R8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1kΩ
R31-R38 . . . . . . . . . . . . . . . . . . . . . . . .20Ω - patrz tekst
R39-R57,R61 . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ - 1%
R58 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .470Ω - dobrać
R59 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14kΩ
PR1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5kΩ helitrim
PR2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10kΩ helitrim
KKoonnddeennssaattoorryy
C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100nF
C2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1nF
C3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1000µF/16V
C4,C5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10µF/16V
C6-C10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33nF
PPóółłpprrzzeewwooddnniikkii
D1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1N4001
D2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .dowolna LED
D3-D67 . . . . . . . . . . . . . . . . . . . . .LED - uwagi w tekście
T1-T8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC327
T9,T10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC557
T11-T18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .BC337
U1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .CD4060
U2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .CD4049UB
U3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .CD4051
U4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .CD4028
U5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM358
U6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .TL431
U7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .LM335
* - można nie stosować
63
Elektronika dla Wszystkich
Audio
Czy w kwestii kolumn głośnikowych wszy-
stko już było?
Otwarte, zamknięte, podwójne, bass-
reflex, labiryntowe, wstęgowe, panelowe,
dipolowe, elektrostatyczne etc. etc.
A tubowe? Właściwie były, ale raczej
tylko jako wysokotonowe dodatki do zwy-
kłych kolumn.
Teraz budujemy tuby szerokopasmowe!
Zaintrygowała mnie niedawno interneto-
wa oferta amerykańskiej firmy Avantgarde.
Proponuje ona różne zestawy tub, których
kulminacją jest tubowy zestaw pełnopasmo-
wy przedstawiony na fotografii 1. Prawda,
że imponujący?
Pomijając to, że jego budowę trzeba było-
by zacząć na etapie projektu domu, jest to coś
nowego, efektownego, a po zapoznaniu się
z teorią tub i opiniami użytkowników takich
urządzeń postanowiłem, że w moim domu
też powinny one znaleźć swoje miejsce.
Nic prostszego niż wypełnić stosowny
formularz na stronie www i dokonać odpo-
wiedniego przelewu bankowego. Ooo, i tu
mamy zimny prysznic. Niejeden wolałby
zjeść szkło, niż wydać takie pieniądze.
A poza tym co robilibyśmy ze swoim
wolnym czasem po takim zakupie? Ja posta-
nowiłem wykonać tuby we własnym zakre-
sie.
Podstawowym parametrem tuby jest jej
dolna częstotliwość graniczna. Wynika ona
po prostu ze średnicy wylotu. Od tej często-
tliwości w górę tuba przenosi równomiernie
(o ile ma odpowiedni kształt), natomiast
w dół mamy równomierny spadek mocy.
Z przyczyn oczywistych nie można usta-
wić w normalnym mieszkaniu tuby o często-
tliwości odcięcia 20 czy 30Hz, chyba że mie-
szkamy w hangarze. Przy tej częstotliwości
zresztą tubę trzeba byłoby wymurować w te-
renie, a u jej wylotu wybudować dopiero dom.
Ale... mieszkać w tubie? Zapominamy za-
tem o całym paśmie akustycznym, godząc się
na uzupełnienie systemu o klasyczny woofer.
Druga sprawa - to głośniki. Ja zadecydo-
wałem, że użyję jednego głośnika szerokopa-
smowego w każdej tubie. Jest na świecie ca-
ła rzesza „jednogłośnikowców“, którzy nie
chcą słyszeć o innych rozwiązaniach niż po-
jedynczy, dobry głośnik. Takie podejście ma
szereg zalet. Przede wszystkim brak zwrotni-
cy, która potrafi zniweczyć połowę wysiłku
wzmacniacza. Amatorzy własnych konstruk-
cji i eksperymentowania z reguły nigdy nie
kończą przeróbek zwrotnic w swoich kolum-
nach, bo zawsze da się coś w nich poprawić,
zmienić. Przy jednym głośniku ten problem
nie istnieje i choćby z tego powodu już mi się
to podoba. Do uzyskania z tub z wysoko-
sprawnymi głośnikami odpowiedniego natę-
żenia dźwięku wystarczy wzmacniacz o mo-
cy 2 x 3...10W.
Zaciski głośnika podłącza się do wyjścia
wzmacniacza, nie ma żadnych strat w ele-
mentach zwrotnicy, nie ma przesunięć fazo-
wych, z którymi przy 3- i więcej- drożnych
kolumnach można zginąć. Nie ma też dyle-
matów typu - czy drut okrągły, czy może le-
piej prostokątny, a może taśma, miedź beztle-
nowa czy srebro, rdzeń z żelaza, ferrytu czy
powietrza? O wadach kondensatorów napisa-
no już tomy, a najgorzej, że to w większości
prawda. Rezystor - wiadomo, żywa strata
mocy. I po co nam to wszystko?
Kupujemy jeden głośnik! Tylko jaki? Tu
żarty się kończą, tuba jeszcze zwiększa efek-
tywność samego głośnika i z dobrym wzmac-
niaczem (a tylko taki tu ma sens) usłyszymy
wszystko, co jest na płycie CD, ale również
i wszystkie wady tego głośnika. Mamy wy-
bór: Lowther, AER, Fostex, Supravox i może
jeszcze 1 - 2 firmy. O cenach nie wspomi-
nam, w każdym razie rosną one wykładniczo
w stosunku do jakości. Po dłuższym zmaga-
niu się z myślami i portfelem, zamówiłem
dwa Fosteksy FE 168 Sigma. Są lepsze niż
niezbędne minimum, ale już niewiele tań-
szych głośników dałoby tu odpowiedni efekt.
Tak czy inaczej, musi to być klasyczny gło-
śnik z lekką, papierową membraną ze stoż-
kiem wysokotonowym, z mocnym magne-
sem, czyli z dużą efektywnością. Powinien
mieć możliwie wyrównaną charakterystykę
w zakresie od 150Hz do 20kHz i jak najwięk-
szą sprawność, rzędu 94 - 98dB. Ponieważ
moje tuby mają średnicę 65cm, co odpowia-
da dolnej częstotliwości F
o
=165Hz, przebieg
charakterystyki głośnika poniżej 100Hz nie
jest już tak istotny.
Dobrze zaprojektowana tuba ma płaską
charakterystykę częstotliwościową powyżej
F
o
. Trzeba zatem zadbać o kształt krzywizny
wnętrza tub i wykonać je najdokładniej jak
potrafimy. Wprawdzie - tak jak przy ante-
nach parabolicznych, liczy się dokładność
odwzorowania powierzchni, ale nie bez-
względna, tylko liczona w stosunku do dłu-
gości fali. W związku z tym nie ma potrzeby
przesadzać, doprowadzając powierzchnię tu-
by do połysku. To jest istotne dla światła wi-
dzialnego, gdzie długość fali wynosi ułamek
mikrometra i wpływa jedynie na efekt wizu-
alny. Tu długość fali akustycznej przy 20kHz
wynosi 16mm, więc jeśli dokładność wyko-
nania tuby będzie rzędu 0,2 - 0,4mm, to bę-
dzie całkiem dobrze.
Kształt tuby może być obliczony z kilku
wzorów, literatura na temat tub jest bardzo
obszerna i znana, jak się okazuje, od dawna.
Zdając się na doświadczenia innych, zastoso-
wałem krzywą typu Tractrix.
Powierzchnia wylotu:
A=1/4/pi*(c/F0)^2
gdzie: c - prędkość dźwięku (344 m/s)
F0 - częstotliwość odcięcia w Hz
Dla kolejnych promieni przekroju po-
przecznego tuby odległość tych przekrojów
od płaszczyzny wylotu wyraża się wzorem:
x= a * log((a + sqrt(a2 - r2)) / r) -
sqrt(a2 - r2)
T
T
u
u
b
b
y
y
o
o
r
r
n
n
o
o
t
t
t
t
u
u
b
b
y
y
,
,
oto jest pytanie...
64
Elektronika dla Wszystkich
Audio
gdzie: x - odległość od płaszczyzny frontu tuby
a - promień wylotu
r - promień w odległości x od
płaszczyzny frontu
Oczywiście do wykreślenia tego kształtu
użyjemy komputera. Program w Basicu wy-
gląda następująco:
Przy jego pomocy można obejrzeć kształt
połówki przekroju podłużnego tuby oraz po-
eksperymentować zmieniając wartości para-
metrów. Zastosowane tu przeze mnie współ-
czynniki mają na celu tylko dopasowanie
skali do wielkości i proporcji ekranu. Potem
należy tę krzywą w skali 1:1 wykreślić na pa-
pierze i wykonać odpowiedni szablon, we-
dług którego wykonamy formę.
Zabrzmiało to prozaicznie; w praktyce za-
jęło mi dobrych kilkanaście dni i zaangażo-
wało paru ludzi z odpowiednio wyposażony-
mi warsztatami. Fotografie 2 - 5 przedsta-
wiają poszczególne fazy powstawania formy.
Wykonałem ją z krążków płyty MDF-u o gru-
bości 28mm. Zostały one tak obliczone, aby
z odpowiednim zapasem utworzyły schodko-
wy obiekt kryjący w sobie negatyw właści-
wej tuby. Potem - po znalezieniu warsztatu,
który byłby w stanie w ogóle założyć to mon-
strum na tokarkę - nastąpiło toczenie, aż do
uzyskania kształtu zgodnego z szablonem.
Gdy w końcu szablon pasował, pozostało tyl-
ko posprzątać cały warsztat z paru kilogra-
mów kurzu powstałego przy toczeniu i szli-
fowaniu.
Następnie namiastkę formy należało za-
impregnować żywicą, wzmocnić tkaniną
szklaną, szpachlować, szlifować, malować,
znowu szlifować itd. itd. W końcu - pasta
rozdzielająca i laminowanie (fotografia 6).
Następnego dnia nastąpiła chwila prawdy -
zejdzie z formy czy nie zejdzie.
Broniła się mocno, ale po półgodzinnej
perswazji tuba zeszła z formy. Nie powiem,
miłe to uczucie, gdy kilka dni pracy nie idzie
na marne i trzyma się w rę-
kach pierwszą w życiu wła-
sną tubę. Następnie kolega
tokarz zrobił mi według do-
starczonego rysunku pier-
ścień z MDF-u, do którego to
pierścienia od przodu została
wklejona tuba, a z tyłu przy-
kręcony głośnik. Na ten pier-
ścień z głośnikiem nasuwa
się z tyłu i mocuje wkrętami
kawałek rury PCV, który
osłania głośnik i jest elemen-
tem, za który można całą tę
konstrukcję przymocować do
podstawki. Wszystko, rzecz
jasna, w dwóch egzempla-
rzach. Fotografia 7 pokazuje
części składowe przed złoże-
niem. Tylną stronę głośnika
należy na koniec wytłumić
paskiem wełny mineralnej
włożonym do rury za głośni-
kiem. Zaciski głośnikowe
mocowane są bezpośrednio
do rury i połączone krótkimi
przewodami z końcówkami
głośnika – patrz fotografia
8. I to wszystko. Puryści mo-
gą te złącza ominąć i kabel
głośnikowy połączyć bezpo-
średnio z głośnikiem. O zgod-
nym fazowo połączeniu chyba
nie wypada w tym gronie
wspominać. Gotową tubę moż-
na zobaczyć na fotografii 9.
Pora na test. Pierwsze od-
słuchy są nieco szokujące.
Dźwięk z takiego „urządze-
nia” jest inny - lekki, bogaty,
swobodnie wypełnia przestrzeń. Są tacy, co
ujmą to w odpowiednie poematy, więc po-
przestanę na wyrażeniu głębokiej aprobaty dla
takiego brzmienia. W końcu tuba akustyczna
ma być transformatorem impedancji akustycz-
nej i, podobnie jak transformator elektryczny
we wzmacniaczu lampowym, dopasowuje ona
impedancję akustyczną głośnika do przestrze-
ni otaczającej tubę. Zapewnia ona, gorsze lub
lepsze, ale jednak dopasowanie tych impedan-
cji. Dla elektronika są to rzeczy mało nama-
calne, lecz fizycy uznali, że tak jest, a prze-
cież nie mamy powodów, aby to negować.
screen 2
rm=325
line (0,199)-(639,199)
line (0,199)-(0,0)
for rx=rm to 65 step -5
pset (1.2*(rm*log((rm+sqr(rm^2-rx^2))/rx)-sqr(rm^2-rx^2)),200-.5*rx)
next rx
1
2
3
4
5
6
7
65
Elektronika dla Wszystkich
Audio
Powiem szczerze, że przez kil-
ka dni musiałem się trochę „nau-
czyć” słuchać, przyzwyczaić do
nowego systemu. Tuby mają cha-
rakterystykę bardziej kierunkową
niż zwykłe kolumny i z całego bo-
gactwa dźwięku możemy korzy-
stać siedząc pośrodku, naprzeciw
tub. Można nie uznawać tego za
wadę; w końcu w przypadku ko-
lumn najlepsze miejsce do słucha-
nia jest w tym samym miejscu.
Wracając do testowania, pozo-
staje nam dokonać oceny równo-
mierności charakterystyki często-
tliwościowej nowego układu.
Jestem w tym szczęśliwym poło-
żeniu, że swego czasu zrobiłem
jeden z najlepszych zakupów
w życiu - za rozsądną cenę naby-
łem cyfrowy procesor dźwięku
DSP8024 niemieckiej firmy
Behringer. W tym miejscu krótko
go opiszę, bo urządzenie to zasłu-
guje na dużą uwagę.
Jest to zespół kilku ciekawych
urządzeń w jednym i przeznaczo-
ny jest do wykorzystania w stu-
diach muzycznych, na koncertach
i w domach melomanów. Podsta-
wową funkcją jest stereofoniczny,
31-kanałowy korektor, którym
możemy dowolnie ukształtować
charakterystykę częstotliwościo-
wą swojego systemu audio. Pro-
ducent zapewnia o wyższości
swojego wyrobu w porównaniu do
podobnych urządzeń analogo-
wych, co do zniekształceń fazo-
wych, dokładności odwzorowania
charakterystyk względem usta-
wień suwaków itd. Oprócz tego
można użyć go jako dokładnego
wskaźnika poziomu z wieloma do-
datkowymi funkcjami. Może też
służyć do autowykrywania kilku
naraz częstotliwości sprzę-
żeń akustycznych (gitary,
mikrofony) i samoczynne-
go ich likwidowania, zanim
jeszcze wystąpią w zauwa-
żalnej postaci. To nie wszy-
stko: można dodawać
opóźnienie sygnału, nieza-
leżnie w obu kanałach,
a każda z funkcji ma wiele
ciekawych opcji. Poza tym
procesor dokonuje analizy
widma sygnałów w czasie
rzeczywistym (RTA - real
time analyze) i to jest dla
mnie bardzo przydatne.
Pamięć 100 ustawień ko-
rektora oraz możliwości
operacji matematycznych
na poszczególnych charakterystykach dopeł-
nia obraz szczęścia jakie daje to pudełko.
Prawdziwy hit zostawiłem na koniec -
możliwość autokorekcji charakterystyki
częstotliwościowej całego systemu, tzn.
wzmacniacza i kolumn wraz z całym ich oto-
czeniem akustycznym. Wejście wzmacniacza
steruje się szumem różowym wytwarzanym
w wewnętrznym generatorze opisywanego
urządzenia i korzystając ze specjalnego mi-
krofonu referencyjnego DSP8024 dokonuje
pomiarów amplitudy co 1/3 oktawy i tak
ustawia suwaki korektora graficznego, aby
wypadkowa charakterystyka była płaska. Ta
cenna właściwość powoduje, że niezależnie
od niedoskonałości kolumn, wzmacniacza
oraz pomieszczenia odsłuchowego, mamy
możliwość w ciągu kilkunastu sekund uzy-
skać najlepszy możliwy efekt.
Wykonując taki test przy podłączonych
tubach łatwo jest ocenić ich równomierność.
Gdyby okazało się, że w jakimś miejscu cha-
rakterystyki jest górka czy dołek o wartości
zbyt dużej, można z tym łatwo walczyć, bo
wiemy, gdzie jest nieprzyjaciel. Słuch jest
bardzo subiektywny i dziś wydaje się, że
podbarwienie jest np. +5dB około 20Hz, a ju-
tro lub na innej płycie już mamy wrażenie,
że +2dB, ale za to w okolicy 500Hz. Poza
tym, mając już to urządzenie w domu, istnie-
je możliwość pozostawienia go w swoim nie
całkiem doskonałym torze sygnałowym na
stałe. Firma oferuje też dodatkową kartę
umożliwiającą wejście i wyjście sygnałem
cyfrowym, bez jego niepotrzebnej, dwukrot-
nej konwersji.
Wprawdzie puryści się w tym miejscu
oburzą, no bo jak w ogóle można myśleć
o wstawianiu jakiejś cyfrowej „śmieciarki”
w sam środek toru audio, ale są sytuacje, kie-
dy bardziej się to opłaca niż wersja surowa.
To są zresztą dywagacje na inny, długi arty-
kuł; w tym momencie pozostańmy przy
stwierdzeniu, że analizatora użyjemy tylko
do oceny widma sygnału odtwarzanego przez
tuby w naszym konkretnym mieszkaniu
i jeśli się okaże, że odchyłki nie są zbyt duże,
docelowo wycofamy go z toru audio.
Otóż po wstawieniu tego urządzenia
w mój tor audio okazało się, że są co prawda
niewielkie nierówności na charakterystyce,
ale nie wymagają szybkiej interwencji. Cen-
niejsza jest czystość i przejrzystość toru niż
zlikwidowanie łagodnej górki w porywach
rzędu 2dB, w zakresie 250 - 1000Hz.
Fotografia 10 pokazuje ustawienia
korektora zaproponowane w trybie autoko-
rekcji.
Jeśli nie jest to szczyt marzeń, zawsze
można zamówić głośniki Lowthera po 1000
euro z groszami za sztukę i wymienić w nich
membrany na lepsze z firmy AER za dodat-
kowe kilkaset euro...
Cały czas mówimy o samych tubach, więc
początek pasma jest na razie „nieczynny”.
8
9
10
11
66
Elektronika dla Wszystkich
Audio
Widać jednak od razu, jaką częstotliwość od-
cięcia powinien mieć woofer uzupełniający
nasz system o basy.
Po dołączeniu woofera ustawienia korek-
tora są takie jak pokazuje fotografia 11.
No cóż, woofer też nie jest prostą sprawą...
Jako że lubię eksperymenty, wstawiłem jakiś
czas temu wielki głośnik Tonsila
GDN38/400 w starą i zbyt małą obudowę,
czego rezultatem jest - jak przewiduje teoria
- podbicie częstotliwości ok. 35 Hz i nagły
spadek mocy poniżej. Zakres 100 - 160 Hz
wymaga podbicia, filtr woofera ma nieco
zbyt niską częstotliwość odcięcia. Korektor,
próbując to wszystko naprawić, ustawia od-
powiednio swoje wirtualne „suwaki”. Teraz
przynajmniej, gdy widzę co się dzieje, mogę
coś postanowić: kupuję, robię inny woofer,
stosuję inny głośnik lub... pozostawiam w to-
rze samego woofera niemiecki wynalazek.
Na razie wybieram to trzecie rozwiązanie,
bo przecież eksperymentów nigdy dość.
Wspomnę jeszcze o tym, że zaraz po wy-
konaniu drugiej tuby, nie mając jeszcze od-
powiednich głośników, wstawiłem do tub
„zwykłe” 4-calowe nisko-średniotonowe
głośniki Focal i uzupełniłem system 2 wstę-
gowymi wysokotonowymi magnetostatami.
Mój DSP zrobił swoje i słuchałem tego kilka
dni. Wydawało się, że jest OK, pozytywne
cechy tub były wyraźne i pozostałoby tak na
dłużej, gdyby nie znajomy właściciel tub,
który uparcie doradzał mi porządne głośniki.
I miał rację. Chociaż Fosteksy to dopiero kla-
sa średnia, różnica zniewala i wzrusza.
Przede wszystkim brak zwrotnicy i jedno
źródło dźwięku dla całego pasma 160
- 20000Hz, a poza tym lekka papierowa
membrana i mocny magnes powodują, że
każdy niuans w prądzie głośnika ma swoje
akustyczne odzwierciedlenie, a tuba jeszcze
go potęguje. Znowu zanosi się na poemat...
Charakterystykę fabryczną bez widocznego
spadku do 20kHz przedstawia rysunek 1.
To się czuje!
Marek Klimczak
matik1@poczta.onet.pl
P.S. Autor artykułu chętnie udzieli dal-
szych informacji na temat zakupu wymienio-
nych głośników oraz gotów jest wykonać
laminowane tuby, ewentualnie udostępnić
swoją formę do ich wykonania. Szczegóły
do uzgodnienia za pomocą e-maila.
Rys. 1
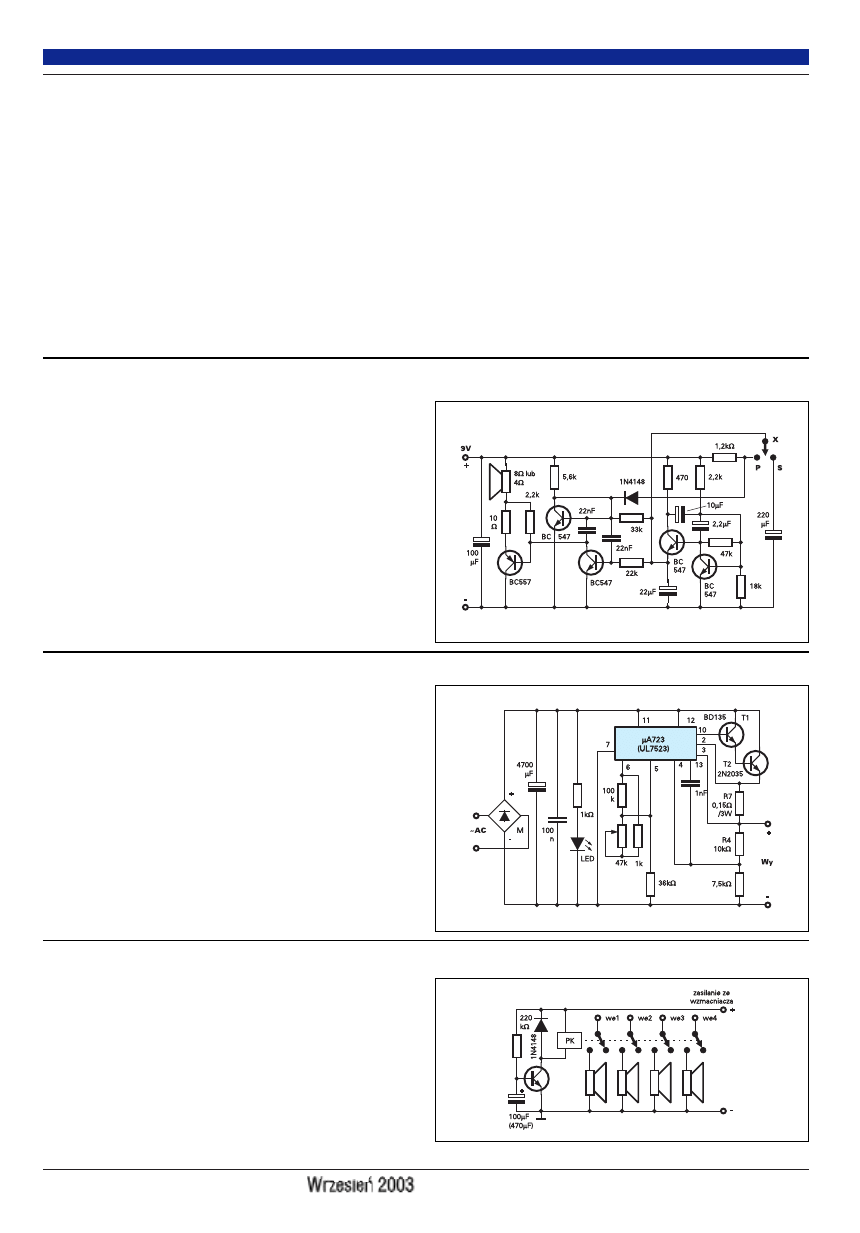
67
Elektronika dla Wszystkich
G
e
n
i
a
l
n
e
s
c
h
e
m
a
t
y,
czyli co by było, gdyby...
W tej rubryce prezentujemy schematy
nadesłane przez Czytelników. Są to za-
równo własne (genialne) rozwiązania
układowe, jak i ciekawsze schematy z li-
teratury, godne Waszym zdaniem pu-
blicznej prezentacji bądź przypomnie-
nia. Są to tylko schematy ideowe, nieko-
niecznie sprawdzone w praktyce, stąd
podtytuł „co by było, gdyby...”. Redakcja
EdW nie gwarantuje, że schematy są
bezbłędne i należy je traktować przede
wszystkim jako źródło inspiracji przy
tworzeniu własnych układów.
Przysyłajcie do tej rubryki przede wszy-
stkim schematy, które powstały jedynie
na papierze, natomiast układy, które
zrealizowaliście w praktyce, nadsyłajcie
wraz z modelami do Forum Czytelników
i do działu E-2000. Nadsyłając godne
zainteresowania schematy z literatury,
podawajcie źródło. Osoby, które nadeślą
najciekawsze schematy oprócz saty-
sfakcji z ujrzenia swego nazwiska na ła-
mach EdW, otrzymają drobne upominki.
Urządzenie to imituje sygnał straży pożarnej, karetki pogotowia
oraz policji. Może mieć zastosowanie w zabawkach mechanicz-
nych, modelach jako sygnał ostrzegawczy lub w alarmach. Według
opisu układ nie wymaga uruchamiania, działa od razu po włączeniu
zasilania. Zmianę tonu uzyskuje się, łącząc punkt X z punktami
P lub S.
Połączenia: - punkty X i S - sygnał karetki pogotowia
- punkty X i P - sygnał straży pożarnej
- punkt X nie podłączony - sygnał policji
Nadesłał
Piotr Podczarski - Redecz Wlk.
Od Redakcji: Układ nie był sprawdzony w Redakcji EdW.
Trójtonowa syrena
Układ stabilizacji napięcia wyjściowego i zabezpieczenia przeciw-
zwarciowego zasilacza zbudowany jest na układzie
µA 723
(UL7523). Prąd zwarcia wyznacza rezystor R7. Zabezpieczenie
działa, gdy spadek napięcia na tym rezystorze osiągnie wartość
0,7V. Górne napięcie regulacji wyznacza rezystor R4. Zwiększając
jego wartość rezystancji zwiększymy górną granicę napięcia wyj-
ściowego. Regulacja napięcia wyjściowego potencjometrem.
Nadesłał
Piotr Podczarski - Redecz Wielki
Zasilacz z zabezpieczeniem
przeciwzwarciowym
Układ bardzo prosty w budowie (tylko jeden tranzystor).
Szczególnie przydatny dla miłośników audio, którzy posiadają
wzmacniacze mocy bez takiego właśnie opóźnienia. Opóźniacz ten
zapobiega charakterystycznemu stukowi, jaki występuje w
głośniku, gdy włączamy wzmacniacz mowy. Czas opóźnienia
można regulować, zmieniając wartość rezystora lub/i kondensatora.
Nadesłał Piotr Podczarski - Redecz Wielki
Opóźniacz włączenia głośników
Document Outline
- edw_2003_09_s10
- edw_2003_09_s12
- edw_2003_09_s13
- edw_2003_09_s16
- edw_2003_09_s18
- edw_2003_09_s20
- edw_2003_09_s24
- edw_2003_09_s27
- edw_2003_09_s30
- edw_2003_09_s34
- edw_2003_09_s45
- edw_2003_09_s48
- edw_2003_09_s50
- edw_2003_09_s52
- edw_2003_09_s56
- edw_2003_09_s58
- edw_2003_09_s63
- edw_2003_09_s67
Wyszukiwarka
Podobne podstrony:
EdW 09 2003
EdW 04 2003
Prawo Handlowe 1 21 09 2003
MEDYTACJA ' 09 2003
MEDYTACJA 8 09 2003
1494953 1400SRM0944 (09 2003) UK EN
MEDYTACJA $ 09 2003
dz u nr153 poz1504 1 09 2003 b
897394 1900SRM0453 (09 2003) UK EN
EdW 08 2003
Prawo Handlowe 1 (21.09.2003), uczelnia WSEI Lublin, prawo handlowe
MEDYTACJA # 09 2003
EdW 03 2003
1498445 1400SRM0945 (09 2003) UK EN
1510463 1400SRM0984 (09 2003) UK EN
MEDYTACJA & 09 2003
EdW 02 2003
ar 147 connect nav 60360839 09 2003
więcej podobnych podstron