
Mechanika Techniczna
i Wytrzymaªo±¢ Materiaªów
Cz¦±¢ I - rodki Ci¦»ko±ci
dr in». Waldemar Samodulski
2010
1.1 Wprowadzenie
Przedmiot Mechanika Techniczna jest dziaªem zyki zajmuj¡cym si¦ ustalaniem
ogólnych praw równowagi oraz ruchu ciaª materialnych. Prawa te stosujemy do
wyidealizowanych schematów w ciaªach rzeczywistych, którymi s¡ punkt mate-
rialny oraz ciaªo doskonale sztywne.
1.2 Przestrzenny ukªad siª równolegªych. rodek
siª równolegªych
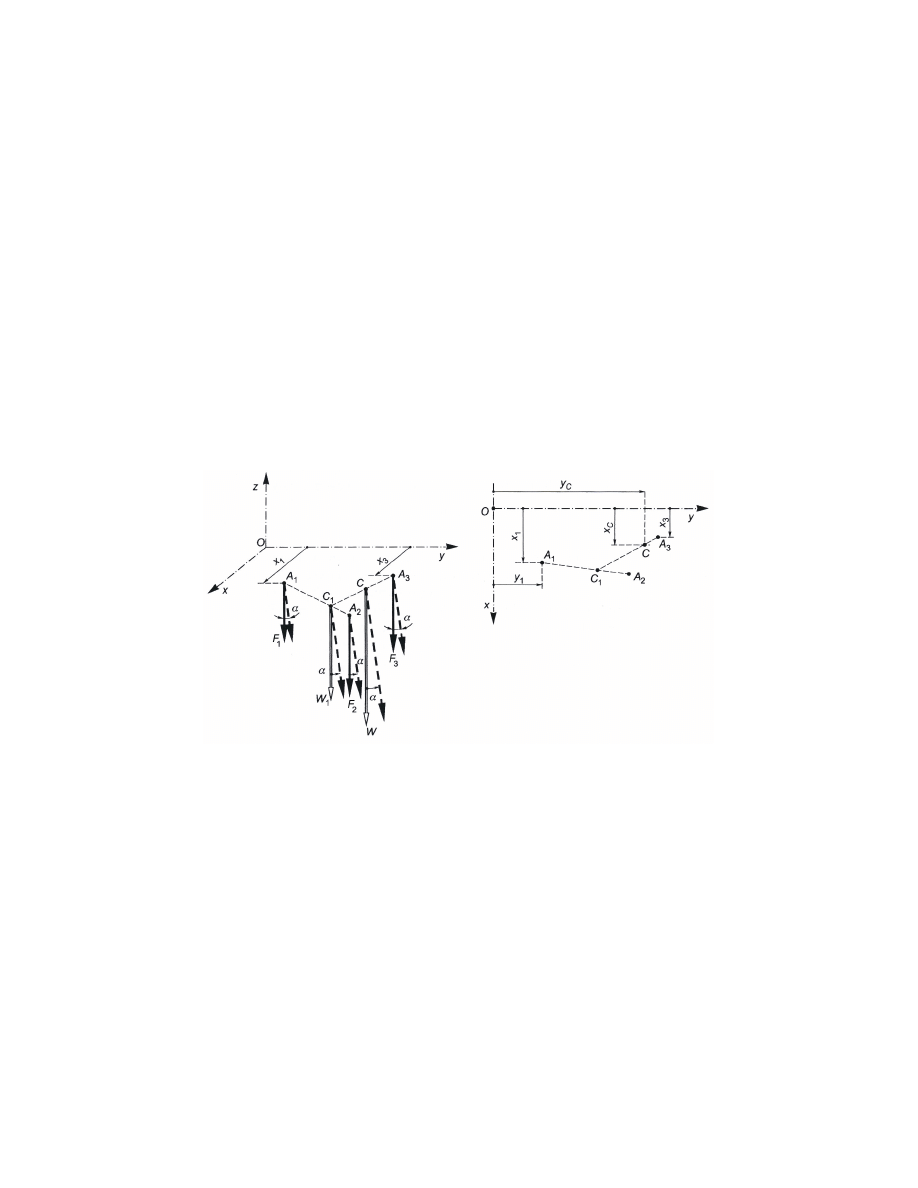
Rozwa»my ogólny przypadek n siª równolegªych F
1
, F
2
, ... F
i
... F
n
, przyªo»o-
nych do punktów A
1
, A
2
, ... A
i
... A
n
. Je»eli suma miar tych siª wzgl¦dem osi
równolegªej do ich linii dziaªania jest ró»na od zera, to mo»emy siªy te zast¡pi¢
jedn¡ siª¡ wypadkow¡ W .
Rys. 1 - Ukªad siª równolegªych
W =
i=n
X
i=1
F
i
(1.1)
gdzie F
i
i W oznaczaj¡ miary siªy F
i
i wypadkowej W wzgl¦dem osi równo-
legªej (rys. 1).
Zaªó»my, »e wszystkie siªy F
1
... F
i
... F
n
zostaªy obrócone o ten sam k¡t
alfa przy niezmienionych punktach przyªo»enia tych siª oraz ich warto±ciach.
Zauwa»amy, »e punkt przyªo»enia C wypadkowej nie zmienia si¦ oraz jej warto±¢
W
pozostaje staªa.
Punkt C nazywamy ±rodkiem siª równolegªych.
1
Moment siªy wypadkowej W wzgl¦dem osi O
y
:
M
y
= W x
c
(1.2)
Moment siªy F przyªo»onej w punkcie A
i
:
M
i
y = F
i
x
i
(1.3)
Korzystaj¡c z twierdzenia o momencie wypadkowej ukªadu siª otrzymujemy:
W x
c
=
i=n
X
i=1
F
i
x
i
(1.4)
st¡d otrzymujemy wspóªrz¦dn¡ x
c
±rodka siª równolegªych:
x
c
=
P
i=n
i=1
F
i
x
i
P
i=n
i=1
F
i
(1.5)
post¦puj¡c analogicznie otrzymujemy pozostaªe wspóªrz¦dne prostok¡tne ±rodka
siª równolegªych:
y
c
=
P
i=n
i=1
F
i
y
i
P
i=n
i=1
F
i
(1.6)
z
c
=
P
i=n
i=1
F
i
z
i
P
i=n
i=1
F
i
(1.7)
1.3 rodki ci¦»ko±ci
Powszechnie spotykanym przykªadem siª równolegªych s¡ siªy ci¦»ko±ci. Siªy te
mo»emy trakowa¢ jako równolegªe, gdy» wymiary ciaª w zastosowaniach tech-
nicznych s¡ znikomo maªe w porównaniu z promieniem kuli ziemskiej. Wypad-
kow¡ siª ci¦»ko±ci mo»emy umie±ci¢ na staªe w ±rodku ci¦»ko±ci C, niezale»nie
od poªo»enia ciaªa.
W miejsce siª F
i
do wzorów (1.5), (1.6), (1.7) wstawiamy G
i
= V
i
∗ γ
, gdzie V
i
- obj¦to±¢ elementu ciaªa, γ - ci¦»ar wªa±ciwy ciaªa.
Wzory (1.5), (1.6), (1.7) przyjmuj¡ wtedy posta¢:
x
c
=
P
i=n
i=1
G
i
x
i
P
i=n
i=1
G
i
=
P
i=n
i=1
V
i
γx
i
P
i=n
i=1
V
i
γ
=
P
i=n
i=1
V
i
x
i
P
i=n
i=1
V
i
(1.8)
y
c
=
P
i=n
i=1
G
i
y
i
P
i=n
i=1
G
i
=
P
i=n
i=1
V
i
γy
i
P
i=n
i=1
V
i
γ
=
P
i=n
i=1
V
i
y
i
P
i=n
i=1
V
i
(1.9)
z
c
=
P
i=n
i=1
G
i
z
i
P
i=n
i=1
G
i
=
P
i=n
i=1
V
i
γz
i
P
i=n
i=1
V
i
γ
=
P
i=n
i=1
V
i
z
i
P
i=n
i=1
V
i
(1.10)
2
Wyst¦puj¡ce wy»ej sumy sko«czone po przej±ciu do granicy zamieniaj¡ si¦
w caªki obj¦to±ciowe rozci¡gni¦te na caª¡ obj¦to±¢ ciaªa.
x
c
=
R ρxdv
m
(1.11)
y
c
=
R ρydv
m
(1.12)
z
c
=
R ρzdv
m
(1.13)
Gdzie: ρ - g¦sto±¢ ciaªa wyra»ona w [
kg
m
3
], m - masa caªkowita ciaªa wyra»ona
w [kg] i okre±lona wzorem m = R ρdv
Caªki wyst¦puj¡ce w licznikach wzorów (1.11), (1.12), (1.13) nosz¡ nazw¦
momentów statycznych ciaªa materialnego wzgl¦dem pªaszczyzn ukªadu wspóª-
rz¦dnych:
R ρxdv
- moment statyczny ciaªa wzgl¦dem pªaszczyzny O
yz
R ρydv
- moment statyczny ciaªa wzgl¦dem pªaszczyzny O
xz
R ρzdv
- moment statyczny ciaªa wzgl¦dem pªaszczyzny O
xy
1.3.1 rodki ci¦»ko±ci linii
Wzory (1.8), (1.9), (1.10) mo»emy zastosowa¢ do wyznaczenia poªo»enia ±rodka
ci¦»ko±ci w ogólnym przypadku dla linii przestrzennej o staªym ci¦»arze jednost-
kowym q, wówczas G
i
= l
i
q
x
c
=
P
i=n
i=1
ql
i
x
i
P
i=n
i=1
ql
i
=
P
i=n
i=1
l
i
x
i
P
i=n
i=1
l
i
(1.14)
y
c
=
P
i=n
i=1
ql
i
y
i
P
i=n
i=1
ql
i
=
P
i=n
i=1
l
i
y
i
P
i=n
i=1
l
i
(1.15)
z
c
=
P
i=n
i=1
ql
i
z
i
P
i=n
i=1
ql
i
=
P
i=n
i=1
l
i
z
i
P
i=n
i=1
l
i
(1.16)
Przedstawione powy»ej sumy zast¦pujemy caªk¡ i otrzymujemy:
x
c
=
R
l
xdl
l
, y
c
=
R
l
ydl
l
, z
c
=
R
l
zdl
l
(1.17)
gdzie l jest dªugo±ci¡ caªkowit¡ linii.
3
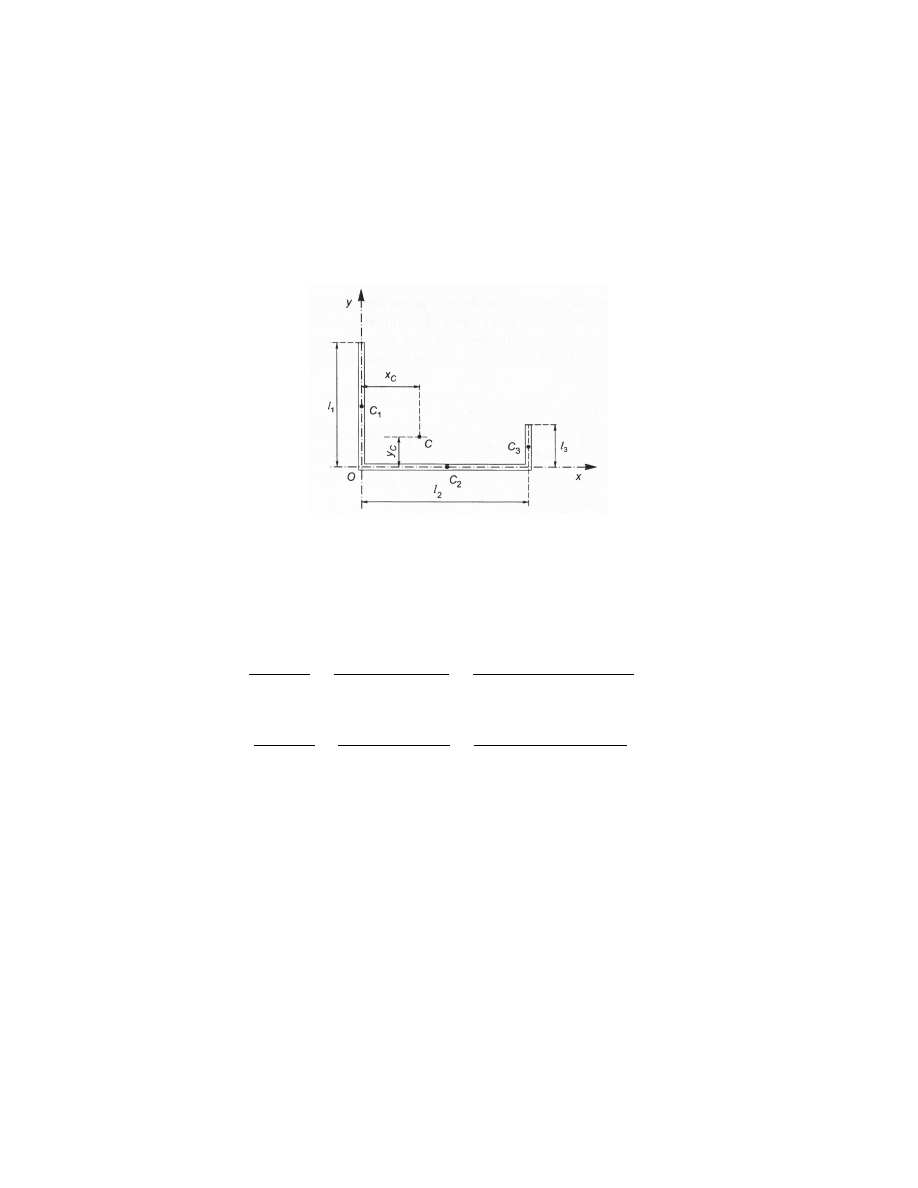
Przykªad 1
Wyznaczy¢ poªo»enie ±rodka ci¦»ko±ci jednorodnej linii ªamanej przedstawionej
na rys. 2. Dªugo±ci poszczególnych odcinków linii wynosz¡: l
1
=20cm, l
2
=30cm,
l
3
=10cm.
Rys. 2 - rodek ci¦»ko±ci jednorodnej linii
Poniewa» mamy do czynienia z lini¡ pªask¡, zastosowanie maj¡ wzory (1.14),
(1.15).
Podstawiaj¡c warto±ci wspóªrz¦dnych ±rodka ci¦»ko±ci odcinków l
1
, l
2
, l
3
otrzy-
mujemy:
x
c
=
P
i=3
i=1
l
i
x
i
P
i=3
i=1
l
i
=
l
1
x
1
+ l
2
x
2
+ l
3
x
3
l
1
+ l
2
+ l
3
=
20 ∗ 0 + 30 ∗ 15 + 10 ∗ 30
20 + 30 + 10
= 12, 5cm
y
c
=
P
i=3
i=1
l
i
y
i
P
i=3
i=1
l
i
=
l
1
y
1
+ l
2
y
2
+ l
3
y
3
l
1
+ l
2
+ l
3
=
20 ∗ 10 + 30 ∗ 0 + 10 ∗ 5
20 + 30 + 10
= 4, 25cm
4
Przykªad 2
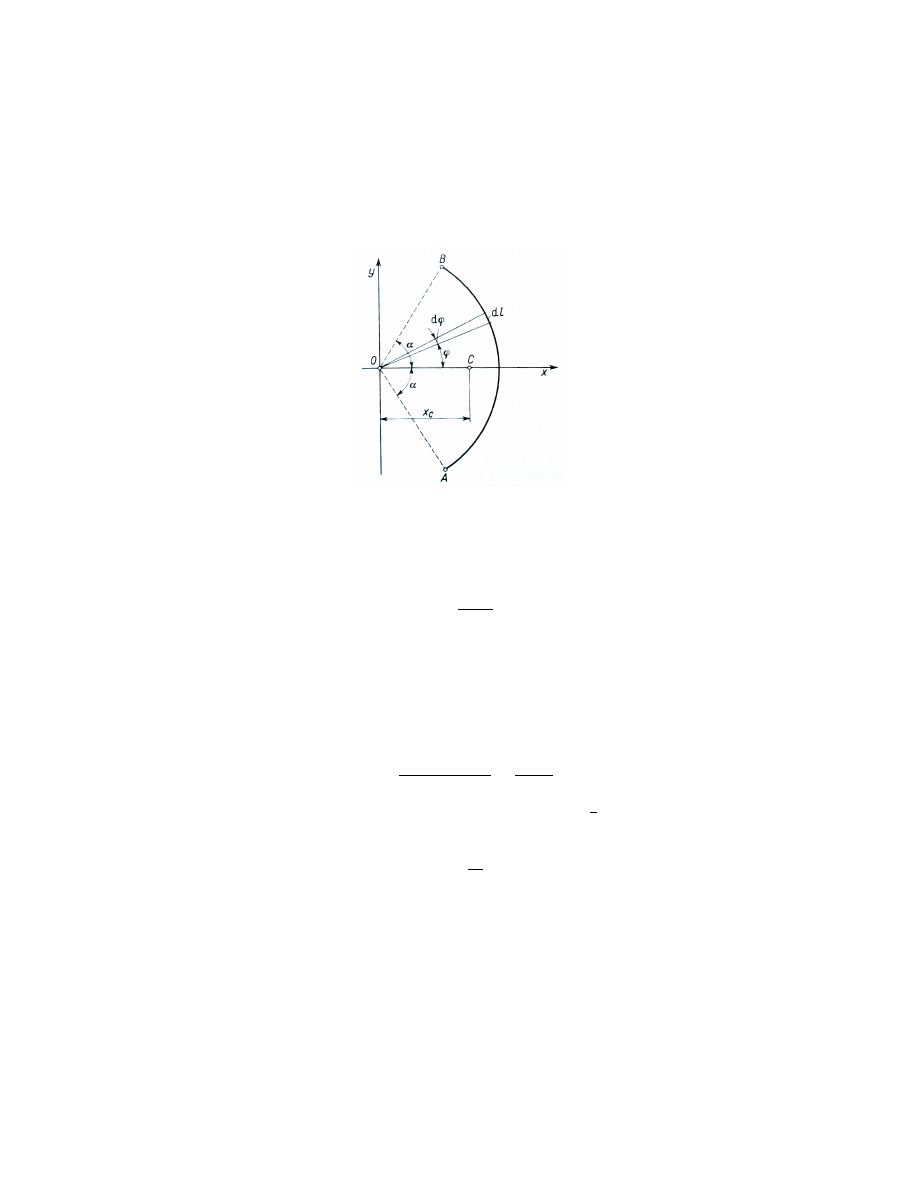
Wyznaczy¢ poªo»enie ±rodka ci¦»ko±ci ªuku okr¦gu o promieniu r
Rys. 3 - rodek ci¦»ko±ci jednorodnego ªuku
(patrz rys.3). Ze wzgl¦du na symetri¦ ªuku, poªo»enie ±rodka ci¦»ko±ci okre±la
tylko jedna wspóªrz¦dna le»¡ca na osi O
x
zgodnie ze wzorem (7).
x
c
=
R
l
xdl
l
gdzie: l = 2rα (dªugo±¢ ªuku)
dl = r ∗ dφ
x = r cos φ
po podstawieniu otrzymujemy:
x
c
=
r
2
R
α
−α
cosφ dφ
2rα
=
rsinα
α
Je»eli do otrzymanego powy»ej wyniku podstawimy α =
π
2
, uzyskamy wspóª-
rz¦dn¡ x
c
okre±laj¡c¡ poªo»enie ±rodka ci¦»ko±ci dla póªokr¦gu:
x
c
=
2r
π
5
1.3.2 rodki ci¦»ko±ci powierzchni
rodek ci¦»ko±ci gury pªaskiej le»y na prostej b¦d¡cej osi¡ symetrii mecha-
nicznej. Dla prostok¡ta lub równolegªoboku ±rodek ci¦»ko±ci le»y na przeci¦ciu
dwóch osi symetrii mechanicznej. W przypadku dowolnego trójk¡ta ±rodek ci¦»-
ko±ci musi le»e¢ na przeci¦ciu ±rodkowych, czyli w 1/3 wysoko±ci od podstawy.
Podstawiaj¡c do wzorów (1.5), (1.6), (1.7) v
i
= A
i
δ
, gdzie A
i
- pole powierzchni
gury, δ - grubo±¢ gury otrzymujemy:
x
c
=
P
i=n
i=1
A
i
x
i
P
i=n
i=1
A
i
, y
c
=
P
i=n
i=1
A
i
y
i
P
i=n
i=1
A
i
(1.18)
lub w postaci caªkowej:
x
c
=
R
A
A
i
x
i
A
, y
c
=
R
A
A
i
y
i
A
(1.19)
Wyra»enia w licznikach nazywamy momentami statycznymi gury pªaskiej
wzgl¦dem osi:
S
y
=
R
A
x dA
- moment statyczny wzgl¦dem osi y
S
x
=
R
A
y dA
- moment statyczny wzgl¦dem osi x
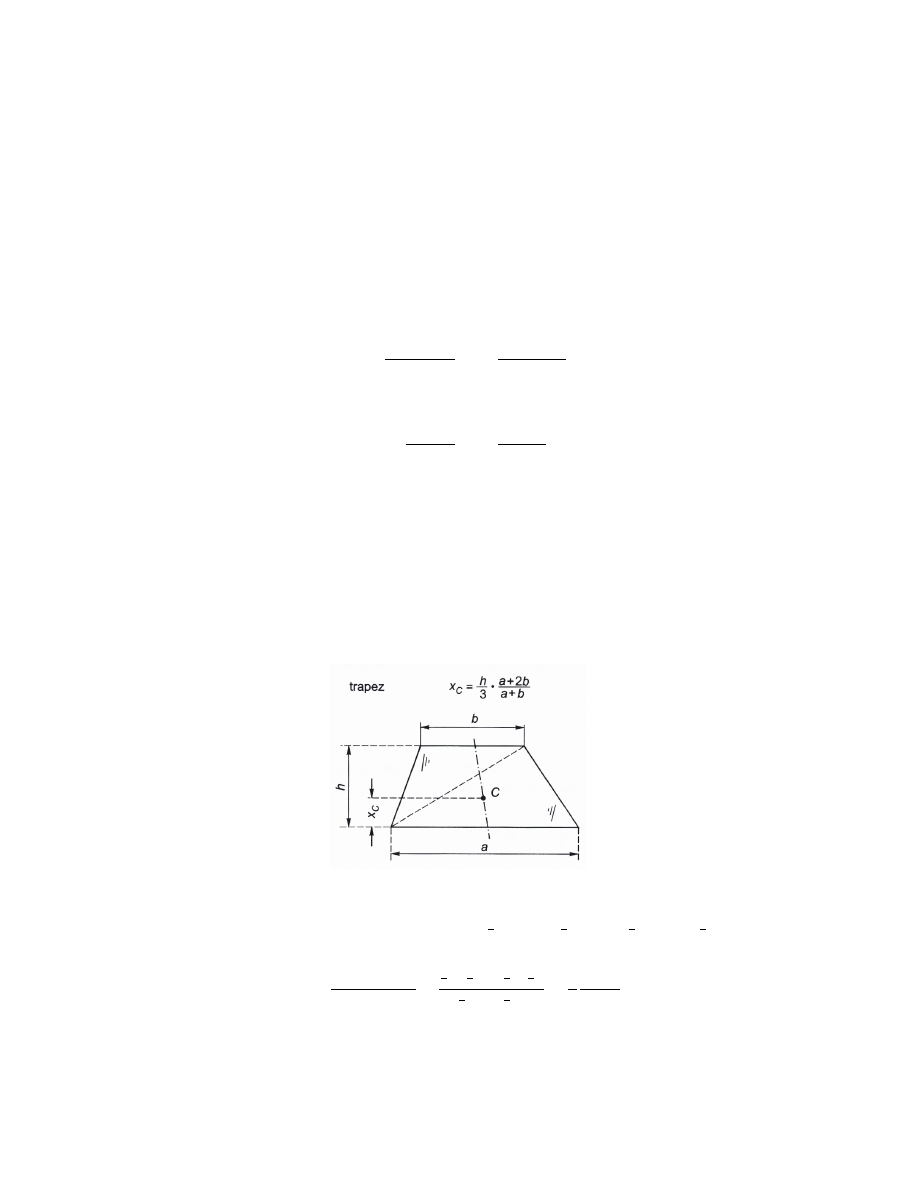
Przykªad 1
Trapez o podstawach a i b oraz wysoko±ci h mo»emy traktowa¢ jako sum¦ dwóch
trójk¡tów (rys. 4).
Rys. 4 - rodek ci¦»ko±ci trapezu
Po podstawieniu do wzoru (1.18) A
1
=
1
2
ah
, x
1
=
1
3
h
, A
2
=
1
2
bh
, x
2
=
2
3
h
otrzymamy:
x
c
=
A
1
x
1
+ A
2
x
2
A
1
+ A
2
=
1
2
ah
1
3
h +
1
2
bh
2
3
h
1
2
ah +
1
2
bh
=
h
3
a + 2b
a + b
6
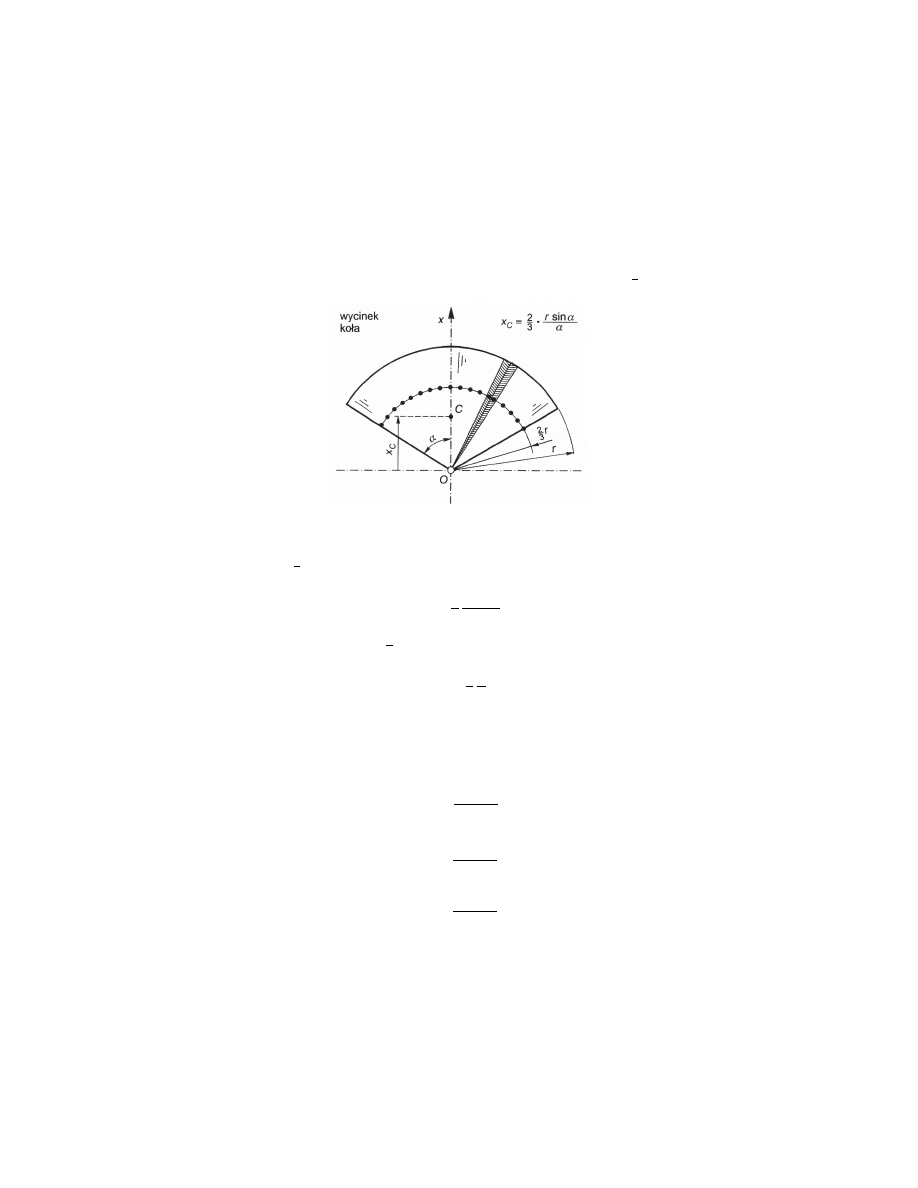
Przykªad 2
W celu wyznaczenia ±rodka ci¦»ko±ci C wycinka koªa o promieniu r i k¡cie
rozwarcia 2α, dzielimy pole wycinka na elementarne trójk¡ty o podstawie równej
rdφ
.
rodki ci¦»ko±ci tych trójk¡tów znajduj¡ si¦ na ªuku o promieniu
2
3
r
.
Rys. 5 - rodek ci¦»ko±ci wycinka koªa
Podstawiaj¡c
2
3
r
do wzoru na ±rodek ci¦»ko±ci ªuku otrzymujemy:
x
c
=
2
3
rsinα
α
dla póªkola wstawiaj¡c α =
π
2
otrzymujemy:
x
c
=
4
3
r
π
1.3.3 rodki ci¦»ko±ci bryª
Poªo»enie ±rodka ci¦»ko±ci bryªy okre±lone jest wzorami:
x
c
=
R ρxdv
m
(1.20)
y
c
=
R ρydv
m
(1.21)
z
c
=
R ρzdv
m
(1.22)
Za ich pomoc¡ wyznaczymy poªo»enie ±rodka ci¦»ko±ci jednorodnego sto»ka.
rodek ci¦»ko±ci C b¦dzie le»aª na osi symetrii sto»ka - O
z
.
7
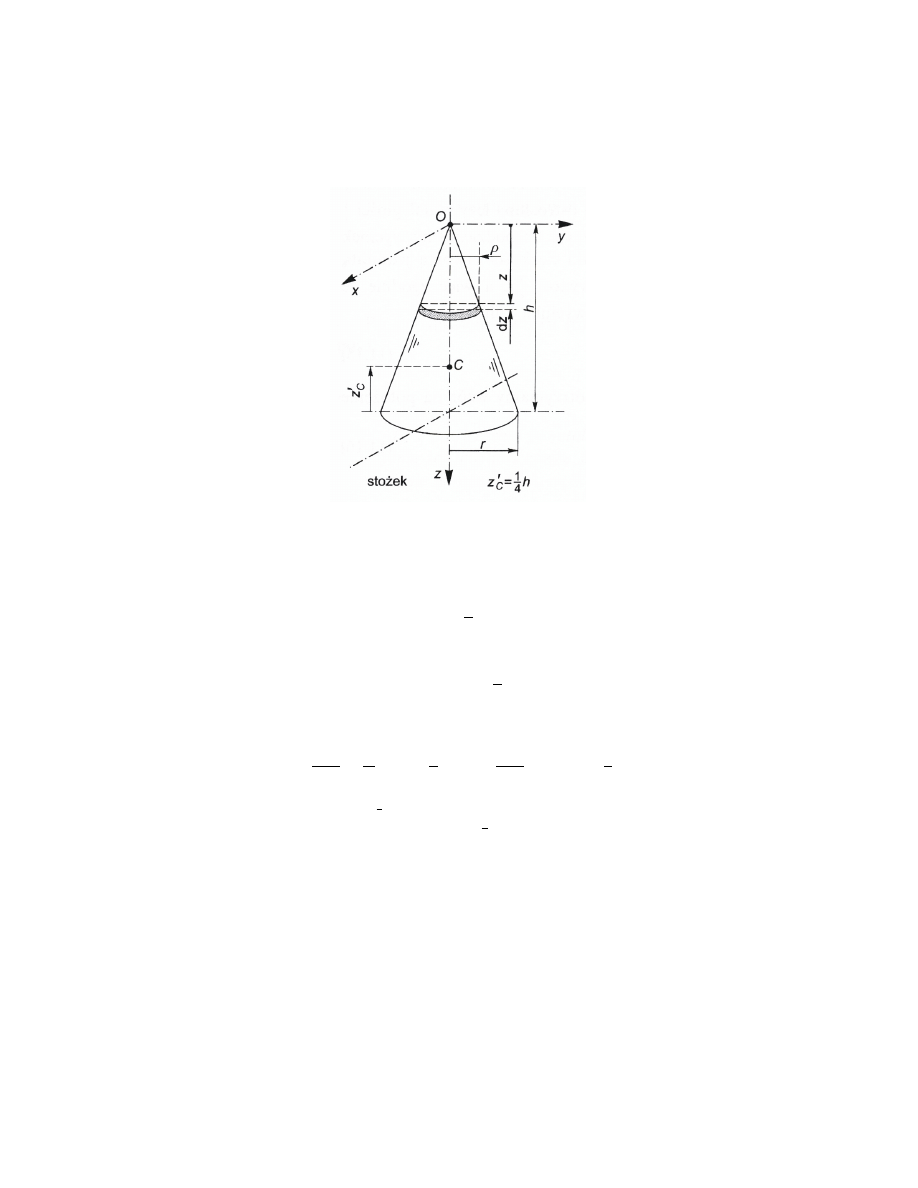
Rys. 5 - rodek ci¦»ko±ci sto»ka
Rozpatrzmy elementarny kr¡»ek o grubo±ci dz w odlegªo±ci z od wierzchoªka
sto»ka. Promie« tego kr¡»ka wynosi:
ρ =
z
h
r
(1.23)
Obj¦to±¢ elementarnego kr¡»ka wynosi:
dV = πρ
2
dz = π(
z
h
r)
2
dz
Korzystaj¡c ze wzoru (1.22) otrzymujemy:
z
c
=
Z
V
zdV
V
=
1
V
Z
h
0
zπ(
z
h
r)
2
dz =
πr
2
V h
2
Z
h
0
z
3
dz =
3
4
h
(1.24)
gdzie obj¦to±¢ sto»ka V =
1
3
πr
2
h
rodek ci¦»ko±ci sto»ka le»y w odlegªo±ci
1
4
h
od podstawy sto»ka. Wynik ten
dotyczy równie» sto»ków uko±nych oraz ostrosªupów o dowolnych podstawach.
8
1.4 Zadania do samodzielnego rozwi¡zania
1.4.1 Zadanie nr 1
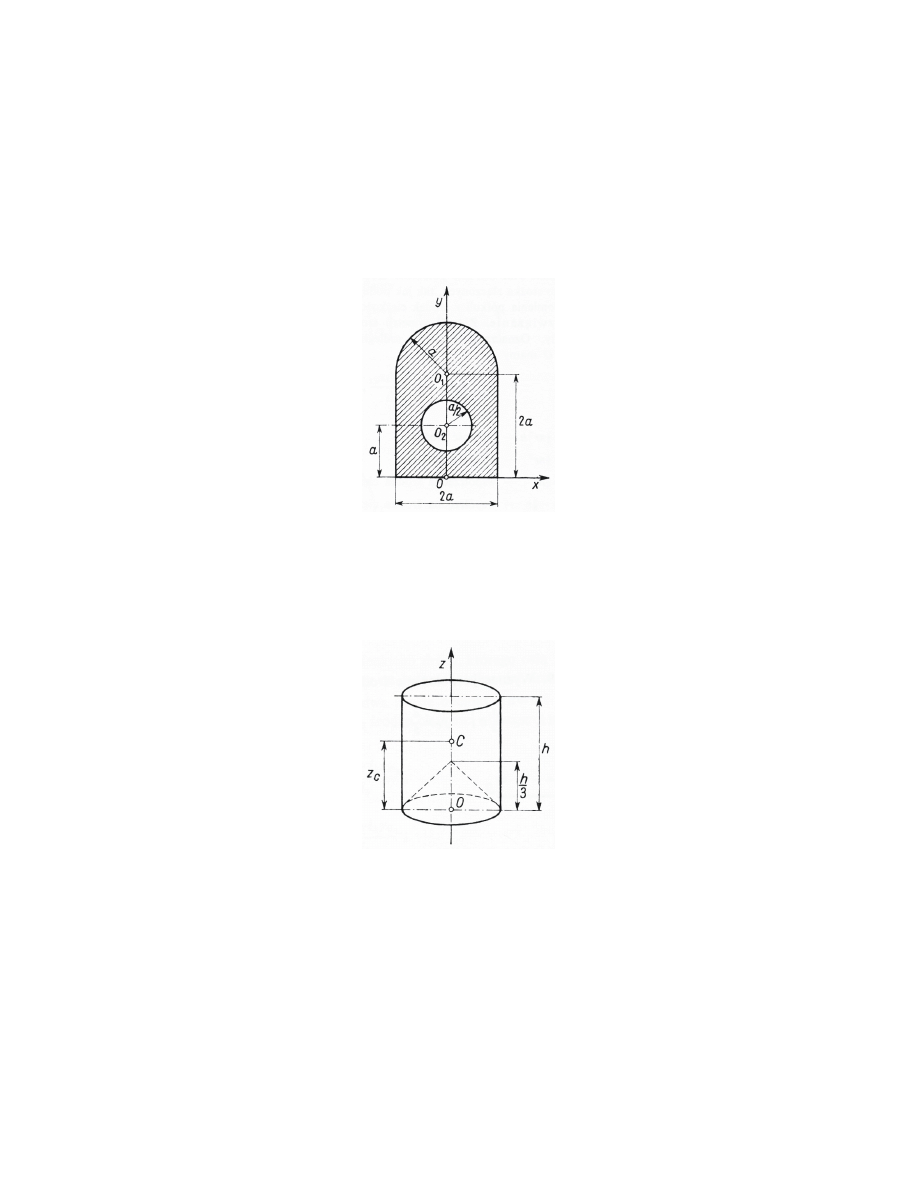
Wyznaczy¢ poªo»enie ±rodka ci¦»ko±ci gury pªaskiej przedstawionej na rys.
Rys. 7
1.4.2 Zadanie nr 2
Z jednorodnego walca wydr¡»ono sto»ek, tak jak przedstawia Rys. 7 Okre±li¢
poªo»enie ±rodka ci¦»ko±ci otrzymanego ciaªa.
Rys. 8
Bibliogra a:
(1) Mechanika Ogólna Tom I, PWN Warszawa 2008
(2) T. Niezgodzi«ski - Mechanika Ogólna, Wydawnictwo Naukowe PWN 2010
9
Wyszukiwarka
Podobne podstrony:
MECHANIKA ŚRODKI CIĘŻKOŚCI ZADANIA, Mechanika
9 zajęcia mechanika środek ciężkości=
Zagrożenia czynnikami mechanicznymi srodki transportu, BHP, Mechanika pojazdowa
4 2 srodki ciezkosci cial jednorodnych
Mechaniczne środki zabezpieczeń przy ochronie obiektów
Środki ciężkości MOS0604
Środki ciężkości MOS0605
Wykład 7 mech, środki ciężkości
Środki mas i środki ciężkości części ciała
Środki ciężkości MOS0603
Środki ciężkości MOS0601
Środki ciężkości MOS0602
8 zajęcia mechanika środek ciężkości
9 zajęcia mechanika środek ciężkości=
Zagrożenia czynnikami mechanicznymi srodki transportu, BHP, Mechanika pojazdowa
więcej podobnych podstron