METODY NUMERYCZNE
Gliwice 2010
wykład
www.kwmimkm.polsl.pl
Interpolacja funkcji
Gliwice 2010
Definicja interpolacji
Gliwice 2010
Dana jest funkcja
0
,
,
.
n
y
f x
x
x x
Znamy tablice wartości
tej funkcji, czyli:
0
0
1
1
i
i
n
n
f x
y
f x
y
f x
y
f x
y
Wyznaczamy funkcję W(x)
spełniającą warunki:
0
0
1
1
i
i
n
n
W x
y
W x
y
W x
y
W x
y
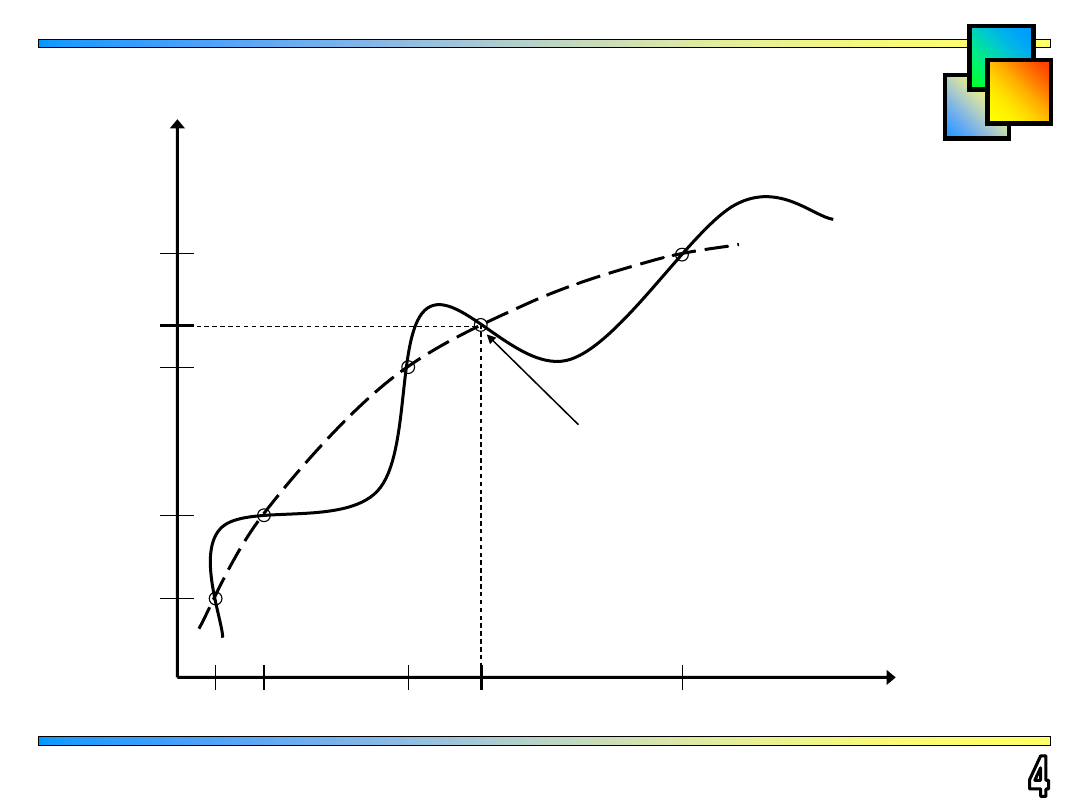
Definicja interpolacji
Gliwice 2010
Definicja interpolacji
x
0
x
1
x
2
x
i
x
n
x
y
0
y
1
y
2
y
i
y
n
y
f (x)
W(x)
i - ty węzeł interpolacji
Gliwice 2010
Wyznaczenie funkcji W(x)
Dobór w postaci kombinacji liniowej n +1 funkcji bazowych
Funkcje bazowe:
0
1
2
φ
,φ
,φ
, ...,φ
, ...,φ
i
n
x
x
x
x
x
Wielomian uogólniony:
0
φ
n
i
i
i
W x
a
x
a
i
– współczynniki
Definicja interpolacji
Macierz bazową:
0
1
2
φ
,φ
,φ
, ...,φ
n
x
x
x
x
Φ
Wielomian uogólniony można zapisać w postaci:
W x
x
Φ
A
Wprowadzając:
Macierz współczynników:
T
0
1
2
, ,
, ...,
n
a a a
a
A
Definicja interpolacji
Gliwice 2010
Gliwice 2010
,
0,1, 2, ...,
i
i
W x
y
i
n
gdzie:
A – macierz kolumnowa współczynników o (n+1) wierszach
Y – macierz kolumnowa wartości funkcji o (n+1) wierszach
X – macierz o wymiarach (n+1)
(n+1)
Warunek, który musi spełnić wielomian interpolacyjny, czyli:
Można zapisać w postaci macierzowej:
X A
Y
Definicja interpolacji
Gliwice 2010
Postać macierzy X i Y:
0
0
1
0
0
0
1
1
1
1
0
1
φ
φ
... φ
φ
φ
... φ
...
...
...
...
φ
φ
... φ
n
n
n
n
n
n
x
x
x
x
x
x
x
x
x
X
0
1
...
n
y
y
y
Y
Definicja interpolacji
Gliwice 2006
Jeżeli det X
0 to:
1
A
X
Y
Podstawiając powyższy wzór do otrzymuje się:
W x
x
Φ
A
Wielomian interpolacyjny:
1
W x
x
Φ
X
Y
gdzie:
(x)
– macierz bazowa
X
-1
– macierz interpolacyjna
Y
– wektor wartości funkcji w węzłach
Definicja interpolacji
Gliwice 2010
INTERPOLACJA
Interpolacja
WIELOMIANOWA
(NATURALNA)
LAGRANGE’A
NEWTONA
(I WZÓR)
CZEBYSZEWA
TRYGONOMETRYCZNA
NEWTONA
(II WZÓR)
Gliwice 2010
Interpolacja wielomianowa
(wielomiany w postaci naturalnej)
Gliwice 2010
Funkcje bazowe:
Postać wielomianu interpolacyjnego:
2
0
1
2
...
n
n
W x
a
a x
a x
a x
Interpolacja wielomianowa
2
0
1
2
φ
1, φ
, φ
, ...,φ
n
n
x
x
x
x
x
x
x
Gliwice 2010
Przy spełnionym warunku:
Taki układ równań, jeżeli wartości x
0
, x
1
, …,x
n
są między sobą
różne posiada jedno rozwiązanie względem a
i
.
Interpolacja wielomianowa
2
0
1 0
2 0
0
0
2
0
1 1
2 1
1
1
2
0
1
2
...
...
...
...
n
n
n
n
n
n
n
n
n
n
a
a x
a x
a x
y
a
a x
a x
a x
y
a
a x
a x
a x
y
Wynika to stąd, że:
0
0
1
1
1
...
1
...
det
0
...
...
...
...
1
...
n
n
n
n
n
x
x
x
x
x
x
X
Gliwice 2010
interpolacja wielomianowa nie jest zbyt efektywna,
ponieważ macierz X jest macierzą pełną
- błędy podczas odwracania
- czas odwracania
Interpolacja wielomianowa
macierz X nie zawsze jest dobrze uwarunkowana
- macierz osobliwa
WADY:
Gliwice 2010
Interpolacja Lagrange’a
Gliwice 2010
Interpolacja Lagrange’a
Funkcje bazowe:
0
1
2
3
1
0
2
3
0
1
1
1
φ
......................
φ
......................
.....................................................................................
φ
...
...
n
n
i
i
i
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
x
0
1
2
1
.....................................................................................
φ
......................
n
n
n
x
x
x
x
x
x
x
x
x
x
dla każdej funkcji
i
(x), i = 0, 1, …, n
brakuje składnika
(x – x
i
)
Gliwice 2010
Postać wielomianu interpolacyjnego:
0
0
1
1
0
1
2
1
0
2
0
1
1
φ
φ
...
φ
...
...
...
...
n
n
n
n
n
n
W x
a
x
a
x
a
x
a
x
x
x
x
x
x
a x
x
x
x
x
x
a
x
x
x
x
x
x
Interpolacja Lagrange’a
Gliwice 2010
Macierz X:
0
0
1
1
2
2
φ
0
0
...
0
0
φ
0
...
0
0
0
φ
...
0
...
...
...
...
...
0
0
0
... φ
n
n
x
x
x
x
X
Interpolacja Lagrange’a
w punkcie
x = x
i
wszystkie funkcje oprócz
i
(x)
zerują się,
ponieważ występuje w nich składnik
(x – x
i
)
Gliwice 2010
Współczynniki wielomianu Lagrange’a wyznacza się ze wzoru:
Interpolacja Lagrange’a
X A
Y
Ponieważ macierz
X
ma tylko główną przekątną niezerową to:
0
0
0
0
1
0
2
0
0
0
1
1
1
1
0
1
2
1
1
1
1
2
1
...
φ
...
φ
...
...
φ
n
n
n
n
n
n
n
n
n
n
n
y
y
a
x
x
x
x
x
x
x
y
y
a
x
x
x
x
x
x
x
y
y
a
x
x
x
x
x
x
x
Gliwice 2010
Czyli wielomian interpolacyjny możemy zapisać w postaci
Interpolacja Lagrange’a
0
1
1
1
0
0
1
1
1
...
...
...
...
n
i
i
n
i
i
i
i
i
i
i
i
i
n
x
x
x
x
x
x
x
x
x
x
W x
y
x
x
x
x
x
x
x
x
x
x
Gliwice 2010
Różnice skończone
Gliwice 2010
Różnice skończone
Dla funkcji stabelaryzowanej przy stałym kroku
h = x
i+1
x
i
wprowadza się pojęcie
różnicy skończonej
rzędu
k
1
i
i
i
y
y
y
2
1
2
1
2
i
i
i
i
i
i
i
y
y
y
y
y
y
y
......
1
1
1
1
1
0
1
k
j
k
k
k
k
i
i
i
i
i k
j
k
y
y
y
y
y
j
Gliwice 2010
Różnice skończone
Na podstawie zbioru wartości funkcji
y
i
= f (x
i
),
x
i+1
x
i
= h = const
buduje się tablicę różnic skończonych
nr
x
y
y
2
y
3
y
0
x
0
y
0
y
0
2
y
0
3
y
0
1
x
1
y
1
y
1
2
y
1
.
2
x
2
y
2
y
2
.
.
3
x
3
y
3
.
.
.
.
.
.
.
.
2
y
n-3
.
.
.
.
2
y
n-2
.
.
.
y
n-1
n
x
n
y
n
Gliwice 2010
Wzory interpolacyjne dla
argumentów równoodległych
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
Dla zbioru węzłów:
0
1
0
2
0
0
,
,
2 , ...,
n
x
x
x
h
x
x
h
x
x
nh
dane są wartości funkcji:
0
1
2
,
,
, ...,
n
f x
f x
f x
f x
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
Funkcje bazowe:
0
1
2
3
φ
1
φ
φ
1
φ
1
2
...
φ
1
2
3 ...
1
n
x
x
q
x
q q
x
q q
q
x
q q
q
q
q
n
0
x
x
q
h
gdzie:
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
Wielomian interpolacyjny:
0
1
2
3
1
1
2
...
1
2 ...
1
n
W x
a
a q
a q q
a q q
q
a q q
q
q
n
0
1
2
:
0
:
1
:
2
...
...
:
n
x
x
q
x
x
q
x
x
q
x
x
q
n
Dla:
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
Postać układu równań z którego wyznacza się współczynniki
a
i
:
0
0
1
1
2
2
3
3
1
0
0
0
...
0
1
1
0
0
...
0
1
2
2
0
...
0
1
3
6
6
...
0
... ...
...
...
... ...
...
...
1
1
1
2
...
!
n
n
a
y
a
y
a
y
a
y
n
n n
n n
n
n
a
y
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
0
0
a
y
0
1
1
a
a
y
1
0
a
y
0
1
2
2
2
2
a
a
a
y
2
0
2
2!
y
a
0
1
2
3
3
3
6
6
a
a
a
a
y
3
0
3
3!
y
a
0
1
2
1
...
!
n
n
a
na
n n
a
n a
y
0
!
n
n
y
a
n
...
...
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
I wzór interpolacyjny Newtona
2
0
0
0
0
1
1 ...
1
...
2!
!
n
q q
q q
q
n
W x
y
q y
y
y
n
0
x
x
q
h
gdzie:
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
I wzór interpolacyjny Newtona - interpolacja w przód
II wzór interpolacyjny Newtona - interpolacja wstecz
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
Wielomian interpolacyjny:
0
1
2
3
1
1
2
...
1
2 ...
1
n
W x
a
a q
a q q
a q q
q
a q q
q
q
n
n
x
x
q
h
Współczynniki wielomianu
a
0
, …, a
n
wyznaczane są identycznie
gdzie:
Gliwice 2010
Wzory interpolacyjne dla argumentów równoodległych
2
1
2
0
1
1 ...
1
...
2!
!
n
n
n
n
q q
q q
q
n
W x
y
q y
y
y
n
II wzór interpolacyjny Newtona
gdzie:
n
x
x
q
h

Gliwice 2010
Wyszukiwarka
Podobne podstrony:
Interpolacja funkcjami sklejany Nieznany
Interpolacja funkcjami sklejany Nieznany
3 funkcje zespolone Nieznany (2)
Interpolacja funkcjami sklejanymi
interpretacje 2010koszykowka id Nieznany
W MF80, Interpolacja funkcji
W MF03, 1. Interpolacja funkcji
W MF84W, Interpolacja funkcji
W MF26, Interpolacja funkcji
W MF75, Interpolacja funkcji
W MF84E, Interpolacja funkcji
W MF27, Interpolacja funkcji
program funkcjonalno uzytkowy i Nieznany
27 ROZ samodzielne funkcje te Nieznany (2)
10 Wlasnosci funkcji ciaglych Nieznany (2)
Bezpieczenstwo funkcjonalne id Nieznany
Deficyty funkcjonowania emocjon Nieznany
więcej podobnych podstron