
1
P
P
O
O
D
D
S
S
T
T
A
A
W
W
Y
Y
R
R
O
O
B
B
O
O
T
T
Y
Y
K
K
I
I
J
J
W
W
.
.
1
1
4
4
.
.
2
2
.
.
1
1
A
A
N
N
D
D
R
R
O
O
I
I
D
D
Y
Y
wczoraj, dziś, jutro
2
1. Definicja słowa android
Słowo android pojawiło się w XVII w. i oznacza maszynę o ludzkiej postaci mogącą
wykonywać niektóre czynności charakterystyczne dla człowieka. Współcześnie pojęcie to
odnosi się do robotów o antropomorficznej budowie, potrafiących działać na podobieństwo
człowieka.
2. Historia
2.1. Zabawki zegarmistrzów
Pierwsze androidy powstały pod koniec XVII wieku w epoce rozkwitu nauki i techniki, dzięki
sztuce zegarmistrzowskiej. W tym okresie pojawienie się biomechanicznej koncepcji istoty
ludzkiej szło w parze z powstaniem licznych sztucznych tworów imitujących naturalne
stworzenia lub też będących ich kopiami. Tworzone były one przez zegarmistrzów w których
zamyśle był rozwój nauki i techniki. W tym celu otaczali się oni lekarzami i chirurgami w
celu opracowania sztucznych organów. Do największych twórców w tej dziedzinie z tamtych
lat zaliczają się m.in.: Vaucanson, Friedrich von Knauss oraz Baron von Kempelen. W ogóle
tworzone wtedy androidy i inne automaty były unikalnymi, będącymi efektem wieloletnich
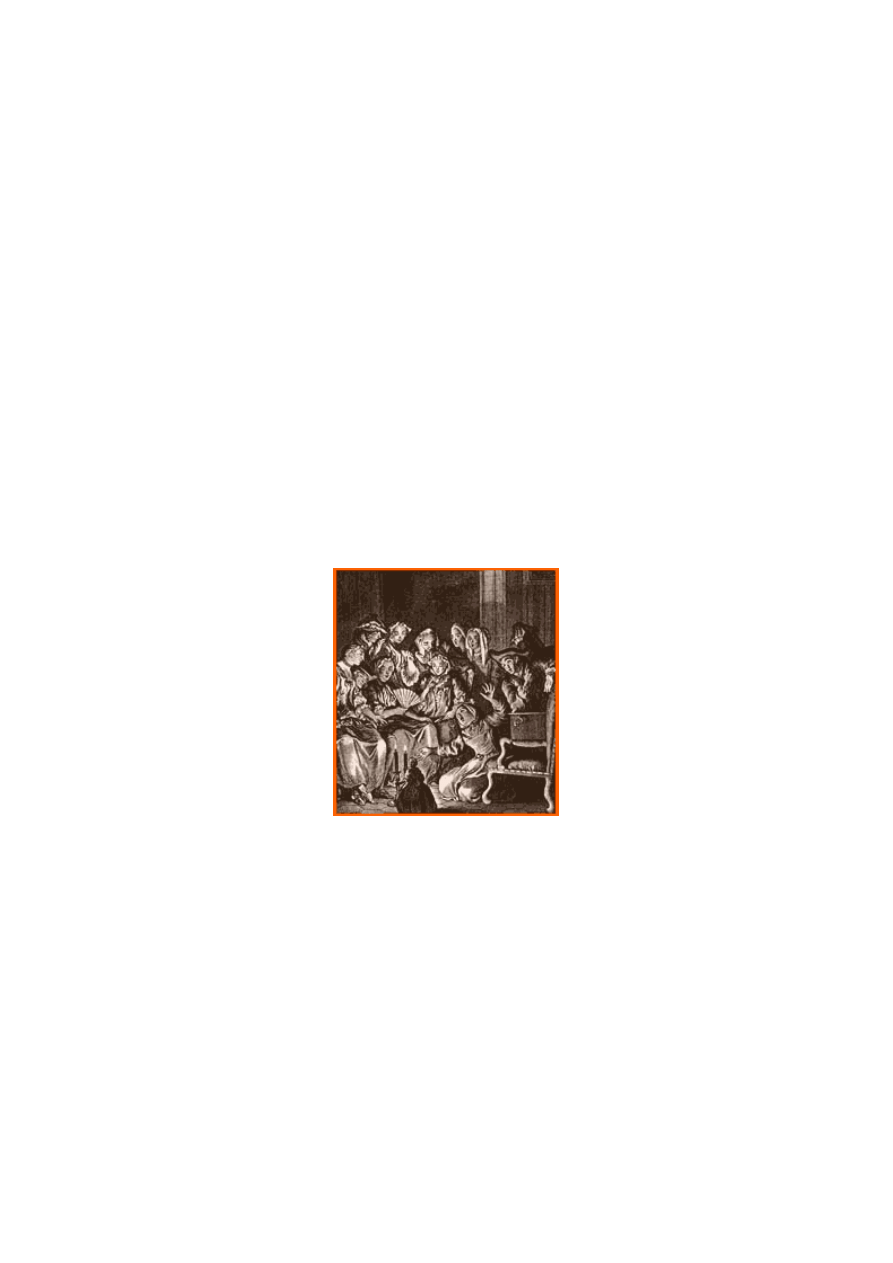
badań pracami. Przykładem takich prac jest przedstawiona na rys. 2.1.1 lalka nosząca
świecznik.
rys. 2.1.1 Lalka niosąca świecznik
2.2. Era magików-techników
Na początku XIX wieku wielu twórców automatów było magikami tworzącymi je na
potrzeby sztuczek iluzjonistycznych będących wtedy w modzie. Wśród nich był między
innymi ojciec współczesnej magii Jean Eugcene Robert-Houdin, który stworzył sztucznego
pisarza.
2.3. „Złoty wiek”
Lata 1850-1914 w których nastąpiła rewolucja przemysłowa to czas gdy produkcja
mechanicznych androidów została uprzemysłowiona. Powstawały liczne poruszające się lalki.
Były one mniej zaawansowane niż ich poprzednicy lecz łatwiej dostępne i bardziej lubiane.
Wykorzystywane były przez świat rozrywki: w cyrkach, w pokazach magików itp.
3
2.4. I Wojna Światowa
Wybuch I Wojny Światowej spowodował stopniowy zanik androidów w takiej
postaci.
3. Nowa era androidów
Niedługo po zakończeniu II Wojny Światowej nastąpił zwrot w tworzeniu androidów.
Wcześniej działające automatycznie lalki wyparte zostały przez programowalne roboty
potrafiące wykonywać określone polecenia .Przyczyny takiej zmiany to:
- rozwój technologii
- postęp w konstrukcji elementów automatyki np.:
- małych silników elektrycznych o dobrych parametrach
- zaawansowanych regulatorów
- pojawienie się stosunkowo tanich komputerów o dużej mocy obliczeniowe
- podobieństwo maszyny cybernetycznej i człowieka.
- ludzka chęć tworzenia sztucznego życia.
3.1. Androidy nowej ery
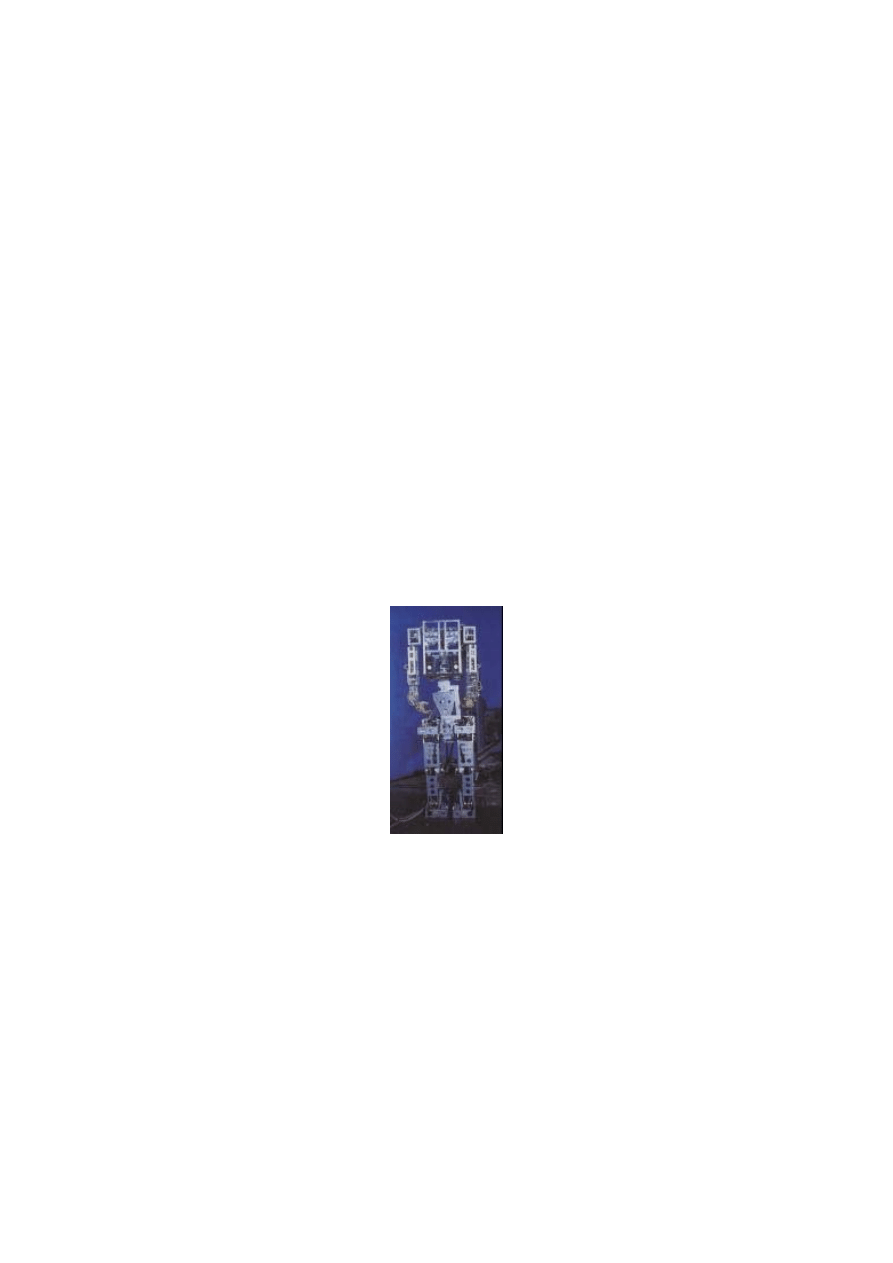
W 1973 r. powstał pierwszy pełno wymiarowy antropomorficzny robot WABOT-1 widoczny
na rys. 3.1.1 Był on wynikiem prac na Uniwersytecie Waseda w Japonii .
rys. 3.1.1 WABOT-1
Robot ten wyposażono w układ kontroli kończyn, układ wizyjny oraz układ
komunikacji głosem. Potrafił porozumiewać się w j. japońskim, określać kierunek i odległość
do przedmiotów przy pomocy zewnętrznych czujników, sztucznych oczu, uszu i ust. Potrafił
chodzić oraz chwytać i przenosić drobne przedmioty używając wyposażonych w czujniki
dotyku rąk.
W połowie lat osiemdziesiątych stworzony został przez NRad (późniejsze Space and
Naval Warfare Systems Center w San Diego) antropomorficzny manipulator o nazwie
GREENMAN. Widoczny na rys. 3.1.2 manipulator wyróżniał się wyraźnie zaznaczonymi
częściami odpowiadającymi ludzkim częściom ciała. Firma realizowała również projekty dla
Marynarki Stanów Zjednoczonych.
4
rys. 3.1.2 Greenman
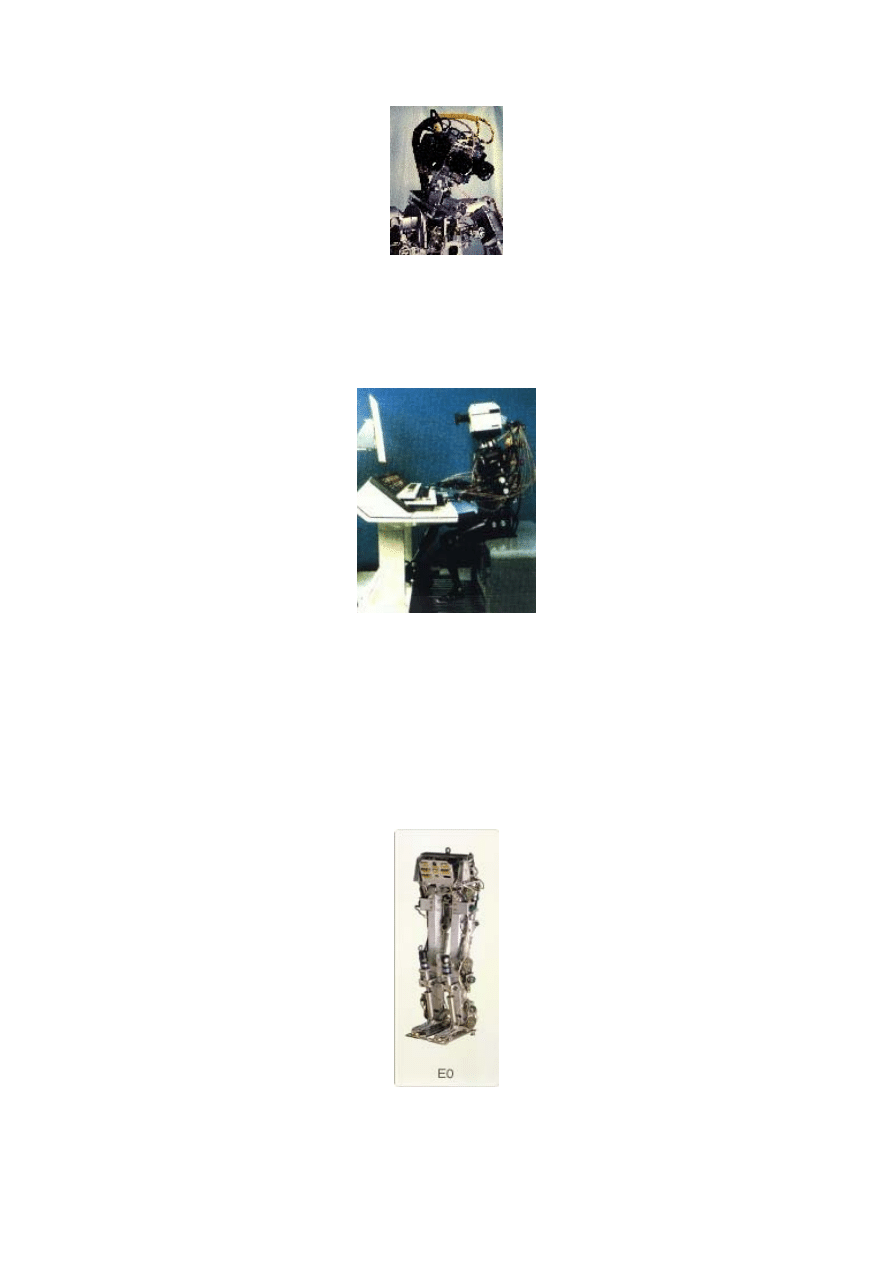
Kolejnym wielkim osiągnięciem Uniwersytetu Waseda w Japonii był android
WASUBOT – robot muzyk (rys. 3.1.3).
rys. 3.1.3 Robot muzyk WASUBOT
Zaprezentowany został na Międzynarodowej Wystawie Nauki i Techniki w 1985r.,
gdzie na rozpoczęciu wraz z orkiestrą symfoniczną zagrał arię na strunę G J.S. Bacha.
Android ten potrafił czytać nuty z pięciolinii i odgrywać je na elektronicznym syntezatorze.
Wraz ze swym poprzednikiem robotem WASUBOT-2 był podstawą do stworzenia „robota
osobistego”.
Rok później powstaje widoczny na rys.3.1.3 mechanizm kroczący E0 firmy Honda.
Zapoczątkował on długoletni, zakończony sukcesem projekt budowy androida, który mógłby
funkcjonować w środowisku człowieka.
rys. 3.1.3 Mechanizm kroczący E0 firmy Honda
3.2. Projekt Honda Motor Company
5
Początek projektu to właśnie dwunożny mechanizm kroczący E0. Kroczył on bardzo powoli
bo zaledwie tempem 5s na krok, tzw. „statycznym” krokiem. W takim rozwiązaniu próby
zwiększenia prędkości kończyły się przewracaniem maszyny. Problemem było właśnie
„statyczne” kroczenie, w którym środek ciężkości przemieszczany jest w linii prostej z
wnętrza jednej stopy maszyny do środka drugiej stopy. Dopiero wtedy następuje
przemieszczenie pierwszej kończyny itd. Z tego względu uzyskanie większych prędkości było
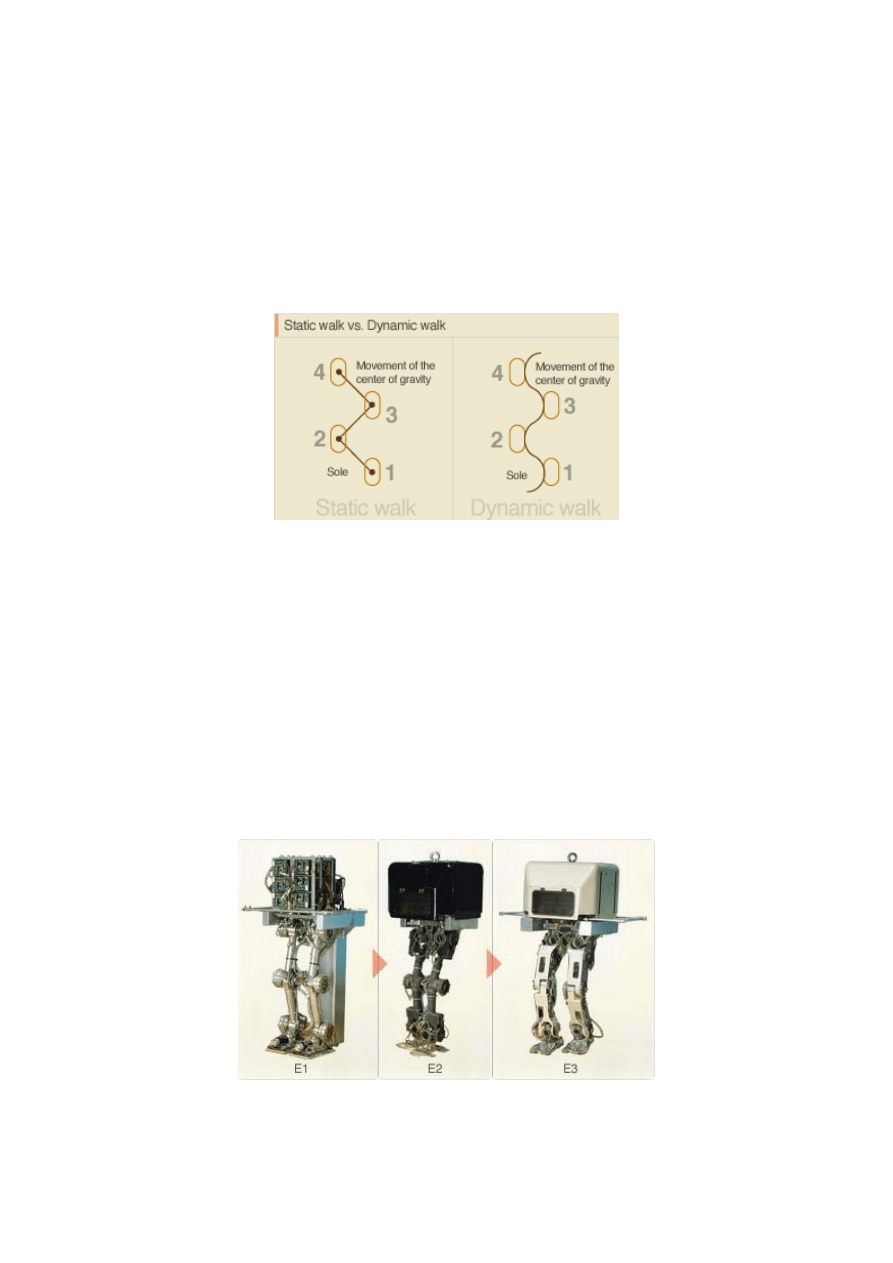
raczej w taki sposób niemożliwe. „Statyczne” chodzenie wraz z „dynamicznym” przedstawia
rys. 3.2.1.
rys. 3.2.1 „Dynamiczne” i „statyczne” kroczenie
Sytuację mogło zmienić wprowadzenie „dynamicznego” kroczenia. W tym rozwiązaniu
środek ciężkości przemieszcza się płynnie między stopami robota po linii sinusoidalnej
podczas wykonywania kroku. Takie kroczenie jest charakterystyczne dla istot żywych.
Badania nad nim przeprowadzono zarówno na ludziach jak i zwierzętach. Chodzenie krokiem
„dynamicznym” było kluczem do zwiększenia prędkości poruszania oraz umożliwienia
chodzenie po różnych powierzchniach jak zbocza o różnym nachyleniu itp.
Pierwszym modelem, który wykorzystywał to rozwiązanie był mechanizm kroczący E2.
Dzięki temu osiągnął on prędkość 1,25 km/h, co było znacznym osiągnięciem w porównaniu
z poprzedzającym go bezpośrednio mechanizmem E1, który chodząc jeszcze w sposób
statyczny osiągał prędkość 0,25 km/h. Dalsze badania pozwoliły na osiągnięcie prędkości 3
km/h przez maszynę E3, co już odpowiadało prędkości uzyskiwanej przez spacerującego
człowieka. Modele te przedstawia rys 3.2.2.
rys. 3.2.2 Maszyny kroczące E1,E2 i E3
6
Eksperymentowanie z „dynamicznym” kroczeniem opłaciło się i naukowcy zajęli się
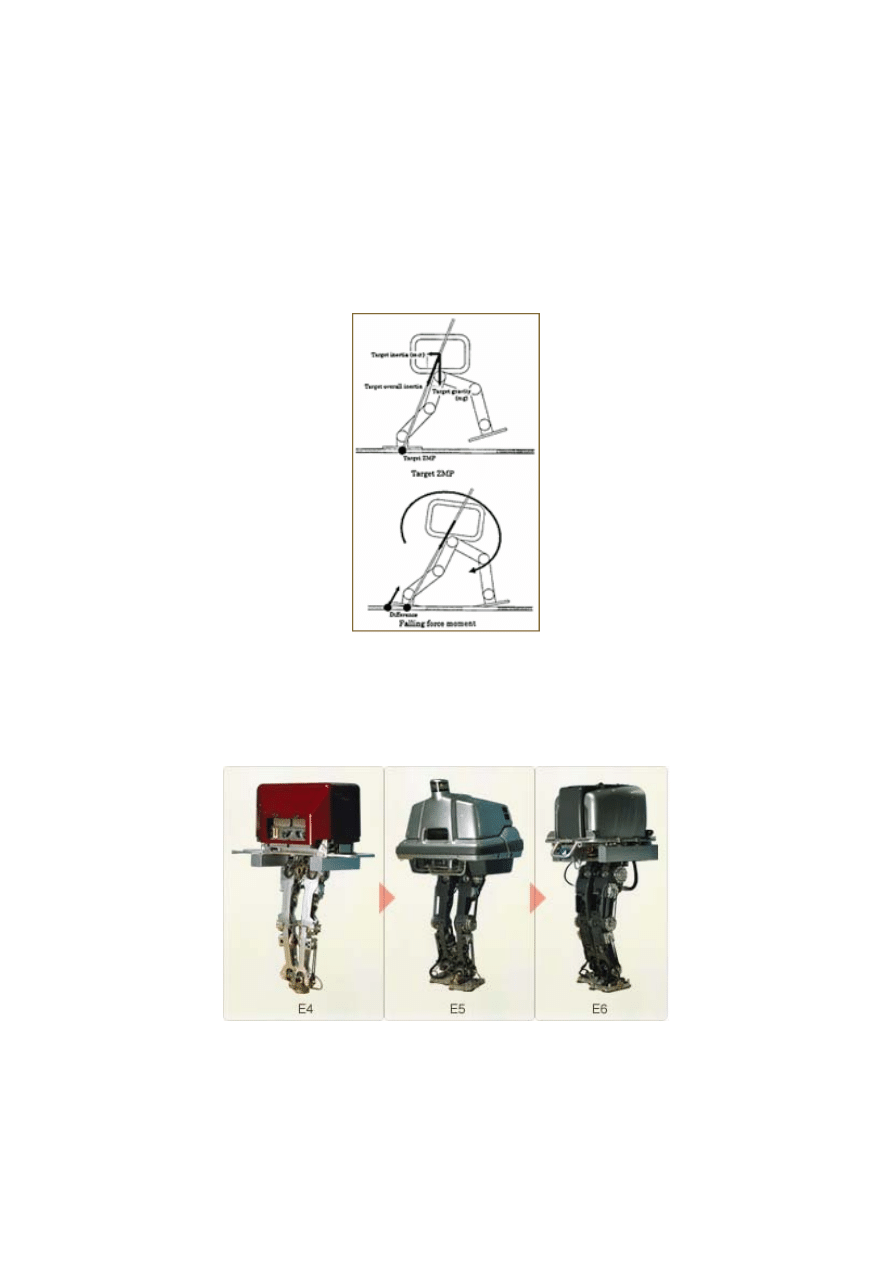
badaniami nad bardziej stabilnym, wolnym bez upadków, chodzeniu. Stworzono trzy układy
kontroli postawy dla stabilizacji chodzenia. W skład wchodziły:
- Układ kontroli reakcji na podłoże. Zrealizowany został dzięki umieszczeniu w
stopach robota i jego stawach odpowiednich czujników
- Układ kontroli postawy podczas stawiania kończyny. Sprowadzał się on do
odpowiedniego reagowania- balansowania całym ciałem robota podczas
chodzenia, w celu uniknięcia upadku
- Układ kontroli celu punktu zerowego momentu (Target Zero Moment Point).
rys3.2.3 Rozkład sił podczas chodzenia.
Zastosowanie tych układów pozwoliło na jeszcze większe upodobnienie chodzenia do
chodu człowieka. Robot wystawiał podniesioną kończynę w celu uniknięcia upadku.
Rozwiązanie zastosowano w kolejnych modelach – E4-E6 przedstawionych na rys. 3.2.4.
rys. 3.2.4. Roboty Honda E4, E5 i E6

7
Poczynione postępy wraz z odpowiednim oprogramowaniem pozwoliły robotowi E4 na
poruszanie się z prędkością 4,7 km/godz. Modele E5 i E6 to już modele które uzyskiwały już
pewną autonomię balansowania ciałem. E6 mógł już chodzić po zboczach i schodach.
Kolejny krok to uzupełnienie maszyny o górną część ciała. Pierwszym humanoidem
wyposażonym już w kończyny górne był prototyp P1. Android ten został wykorzystany do
badań nad koordynacją ruchów kończyn. Mógł np. przełączać przyciski, chwytać klamkę oraz
przenosić przedmioty. Przy wzroście 191,5 m ważył 175 kg . Był on podstawą do stworzenia
prototypu P2, który przyniósł sławę firmie Honda. Ten autonomiczny humanoid przy
wzroście 182 cm ważył aż 215 kg. Wszystkie jego elementy – baterie, napędy, komputer,
czujniki, znajdowały się w jego ciele. Reagował na wiele poleceń, mógł chodzić po schodach
do góry i w dół oraz pchać wózek. Rys 3.2.5 przedstawia modele P1 i P2.
rys.3.2.5 Prototyp P1 i rewolucyjny P2.
Poniższa tabela przedstawia podstawowe dane techniczne androida P2.
Tabela 3.2.1 Dane techniczne androida P2
128V 6Ah (Ni-Zn)
Bateria
30
Liczba stopni swobody
Microspec II x 4
CPU
600 mm
Szerokość
758 mm
Grubość
1 820 mm
Wysokość
210 kg
Masa
15 min
Czas działania
5 kg/ręka
Max obciążenie
2 km/godz.
Max szybkość

8
Głównym problemem, z którym musieli uporać się naukowcy, było wydłużenie czasu
działania robota, gdyż 15 min. było to zdecydowanie za mało. Tendencje do zmniejszania
rozmiarów oraz zastosowanie lżejszych materiałów pozwoliło na wydłużenie czasu działania
androida P3 do 25 min. przy identycznej baterii. Prototyp P3 był pierwszym w pełni
autonomicznym robotem na świecie. Miał tylko 160 cm wzrostu i ważył 130 kg. Wyposażony
został w wyrafinowany układ kontroli, dzięki czemu mógł funkcjonować w środowisku
człowieka. Potrafił np. poruszać się w umeblowanym pokoju. Robot przedstawiony został na
rys. 3.2.6.
rys. 3.2.6 P3 humanoid.
Jak widać na rysunku android posiada bardziej przyjazny dla oka wygląd niż jego
poprzednicy. Robot ten ciągle był ograniczony w swoim poruszaniu. Podczas zmiany
kierunku chodzenia musiał się zatrzymać co wiązało się z różnymi wariacjami czasu na krok
dla chodzenia prosto i skręcania. Wariacja wyznacza promień łuku po którym robot może
przejść. P3 miał wgraną ograniczoną ilość takich wariacji, przez co często musiał obracać się
w miejscu, gdyż nie mógł zmieniać ich płynnie. Każdy łuk o innym promieniu ma natomiast
inną wariację. Aby to zmienić konieczne było zastosowanie algorytmu, w którym trasa, po
której ma przejść robot, byłaby tworzona na bieżąco, a robot miałby swobodę w doborze kąta
skrętu i miejsca stawiania kończyn. Robot w trakcie marszu musiałby tworzyć przewidywaną
trasę, po której przejdzie za chwilę.
Takie właśnie rozwiązanie zastosowano w kolejnym modelu androida Hondy – w
ASIMO. ASIMO to skrót od słów Advenced Step in Innovative MObility, co w wolnym
tłumaczeniu oznacza zaawansowany krok w innowacyjną mobilność, ruchliwość. Nie jest to
przesadzone stwierdzenie, gdyż nowy model rzeczywiście wygląda imponująco. Porusza się
w sposób bardzo płynny i stabilny. Potrafi zmieniać tempo kroków jak i ich długość.
Niestraszne też mu są różne bardziej skomplikowane sekwencje kroków jak krok taneczny
oraz specjalne sekwencje jak np. strzelenia piłki do bramki. Robota przedstawia rys.3.2.7.
9
rys.3.2.7. ASIMO
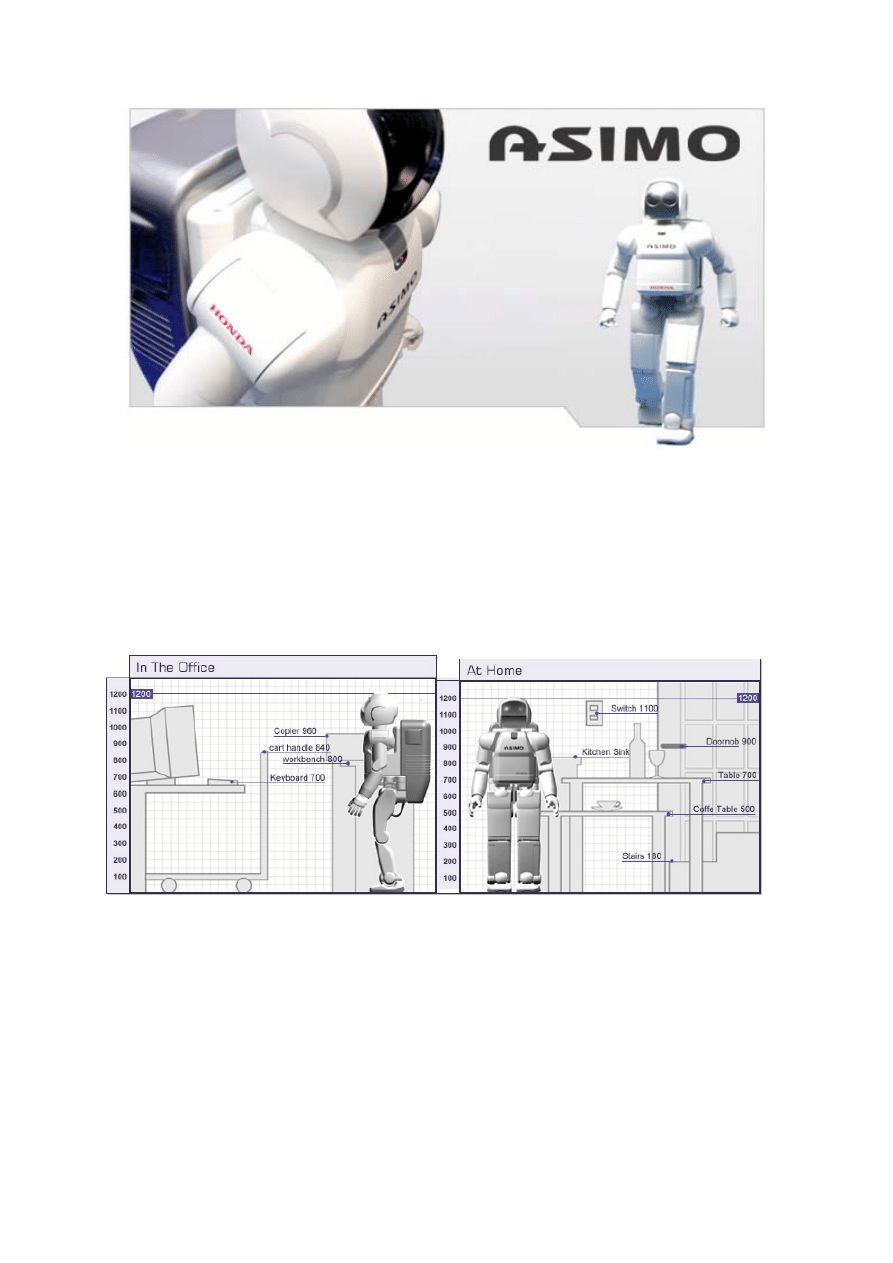
Android ASIMO jest znacznie mniejszy od swych starszych „kuzynów”. Ma zaledwie
120 cm co jednak pozwala mu w pełni wykonywać zadania do których został stworzony. Jego
przeznaczeniem jest bowiem pomaganie człowiekowi w jego codziennych czynnościach. I tak
jego wysokość, jak widać na rys. 3.2.8 pozwala mu na dosięgnięcie uchwytu wózka
biurowego, dosięgnięcie do klawiatury na biurku, rzeczy zostawionych na stole, przełączanie
włącznika światła chodzenie po schodach i inne.
rys. 3.2.9 ASIMO w biurze i w domu.
Takie jest właśnie przeznaczenie tego chyba w tej chwili największego osiągnięcia
robotyki. Prywatny asystent do pomocy w biurze i domu. Specjalne rozwiązania pozwalają
mu na chwytanie przedmiotów ponad wysokością ramion. Porównanie obszaru, w którym
mogą pracować ASIMO i jego poprzednik P3 przedstawia rys 3.2.10. Specjalne rozwiązania
techniczne oraz większa liczba stopni swobody pozwalają ASIMO na pracę w większym
obszarze niż P3.
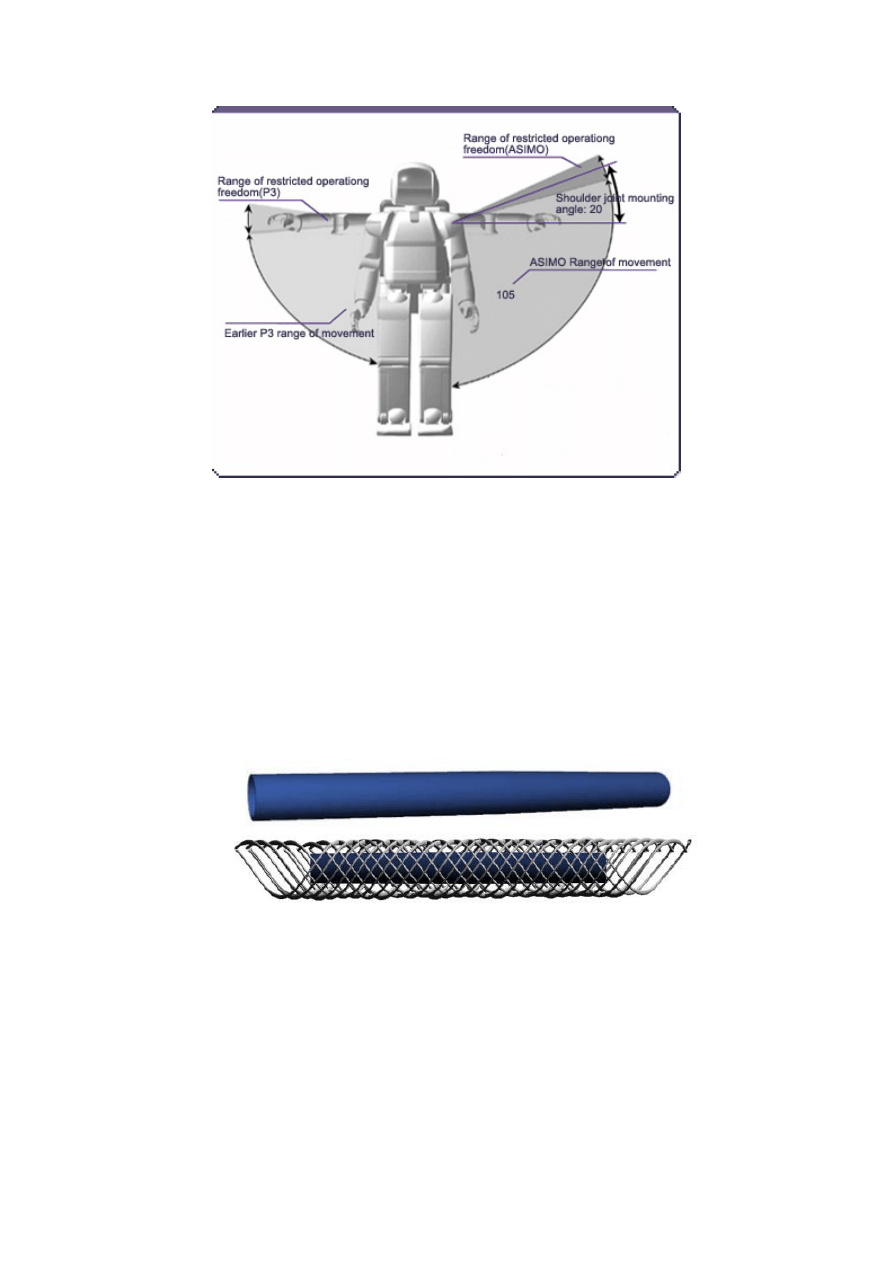
10
rys. 3.2.10 Obszar pracy P3 i ASIMO
4. Przyszłość androidów
4.1. Shadow Company
Prawdopodobnie
kierunek dalszego rozwoju wyznaczyła firma Shadow Company, która w
swych badaniach wykorzystała sprężone powietrze i materiały do stworzenia sztucznego
mięśnia. Budowa takiego mięśnia przedstawiona jest na rys. 4.1.1
Rys. 4.1.1 Rdzeń i elastyczna siatka sztucznego mięśnia.
Takie mięśnie działają na podobieństwo mięśni człowieka, a osadzenie ich na szkielecie
o budowie szkieletu ludzkiej ręki i odpowiednie zamontowanie mięśni i sztucznych ścięgien
pozwala na wykonywanie wszystkich ruchów, które mogłaby wykonać prawdziwa ręka.
Zbudowany jest z gumowej rury oraz elastycznej plastikowej siatki ją otaczającej,
zapobiegającej uszkodzeniu rdzenia i zwiększającej wytrzymałość mięśnia. Projekt firmy
Shadow rozpoczął się na początku lat ’80, a pierwszym znaczącym osiągnięciem było
stworzenie aeroręki wykorzystującej tę technologię.
11
rys. 4.1.2 Aeroręka
Przedstawiona na rys. 4.1.2 ręka potrafi przy odpowiednim zaprogramowaniu
przepływu zasilającego powietrza wykonać każdy ruch ręki ludzkiej. Mięśnie zamontowane
są na elementach wzorowanych na ludzkim szkielecie, przez co taka ręka posiada tyle samo
stopni swobody co ręka prawdziwa.
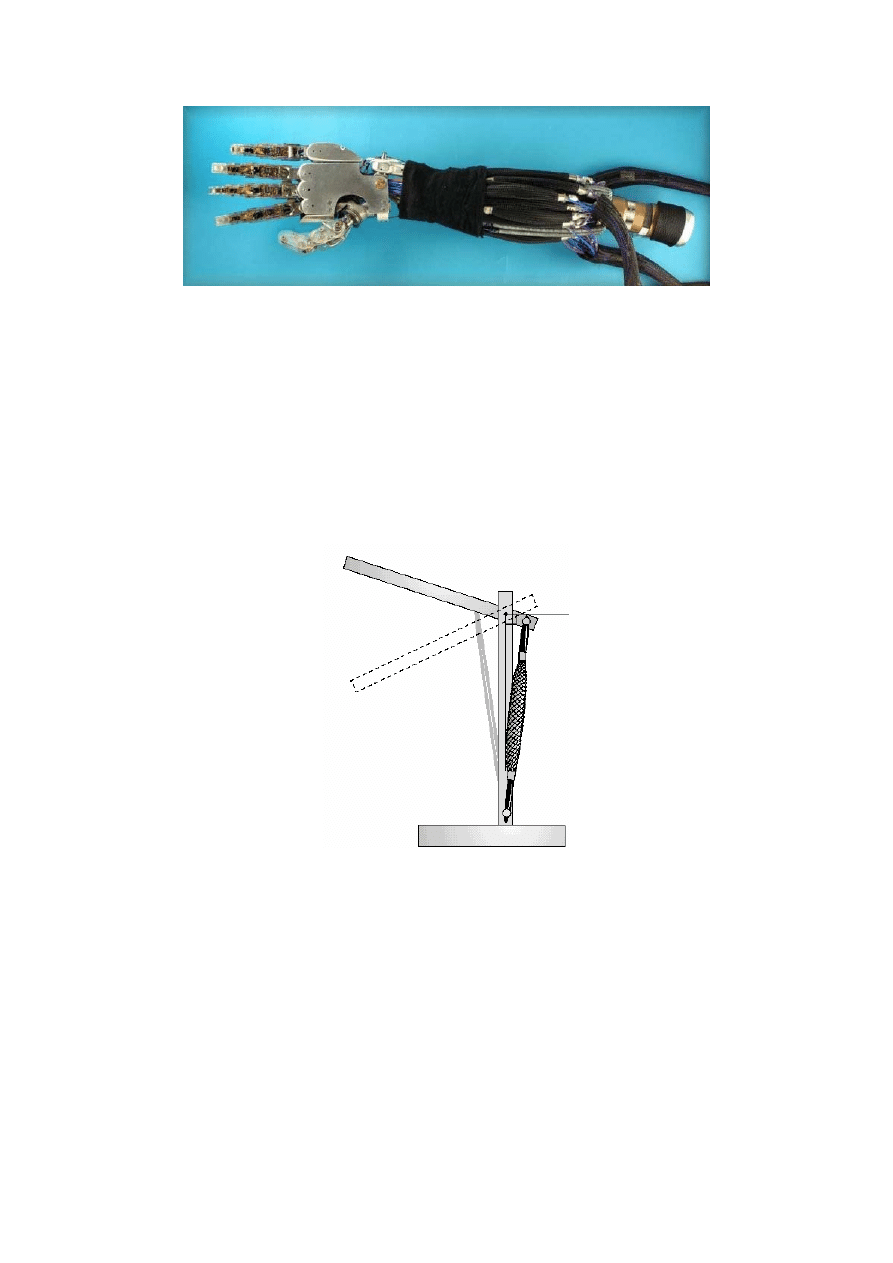
Działanie mięśnia jest analogiczne do działania prawdziwego mięśnia. Odpowiednią
siłę uzyskuje się przez doprowadzeni sprężonego powietrza do mięśni, przez co następuje
jego skrócenie. Taki sztuczny mięsień podczas pracy może nawet skrócić się o 40 %.
Zamontowany jak na rys. 4.1.2 powoduje uniesienie dźwigni do góry oraz rozciągnięcie
zamontowanego po drugiej stronie ścięgna.
rys.4.1.2 Działanie sztucznego mięśnia.
Po obniżeniu ciśnienia zasilającego następuje stopniowy powrót dźwigni do stanu
spoczynku. Wraca ona dzięki energii zgromadzonej w ścięgnie oraz dzięki sile grawitacji.
Zgodnie z zasadami fizyki montaż mięśnia bliżej środka obrotu dźwigni spowoduje
zwiększenie uzyskiwanej siły zmniejszając jednak zasięg.
W rozwiązaniu takim kryje się wiele zalet. Po pierwsze znacznie zwiększa się
uzyskiwana siła. Dla średnicy mięśnia 6mm uzyskano siłę małego palca u ręki. Zastosowanie
mięśnia o średnicy 20 mm pozwoliło na utrzymanie masy 20 kg oraz 70 kg dla średnicy 30
mm. Ewentualne użycie mięśnia o średnicy 50 mm pozwoliłoby na uzyskanie siły
pozwalającej zniszczyć ceglaną ścianę! Eliminuje to problem umieszczania dużej liczby
czujników w dłoni androida. Rozwiązanie jest stosunkowo tanie, jeśli chodzi o uzyskiwane
dzięki niemu siły, oraz pozwala na łatwą konserwację i wymianę uszkodzonych elementów –
pojedynczych mięśni. Problemem jest jednak trudność z zapewnieniem odpowiedniej
12
kontrolą przepływu powietrza, odpowiednie przygotowanie powietrza oraz szczelność całego
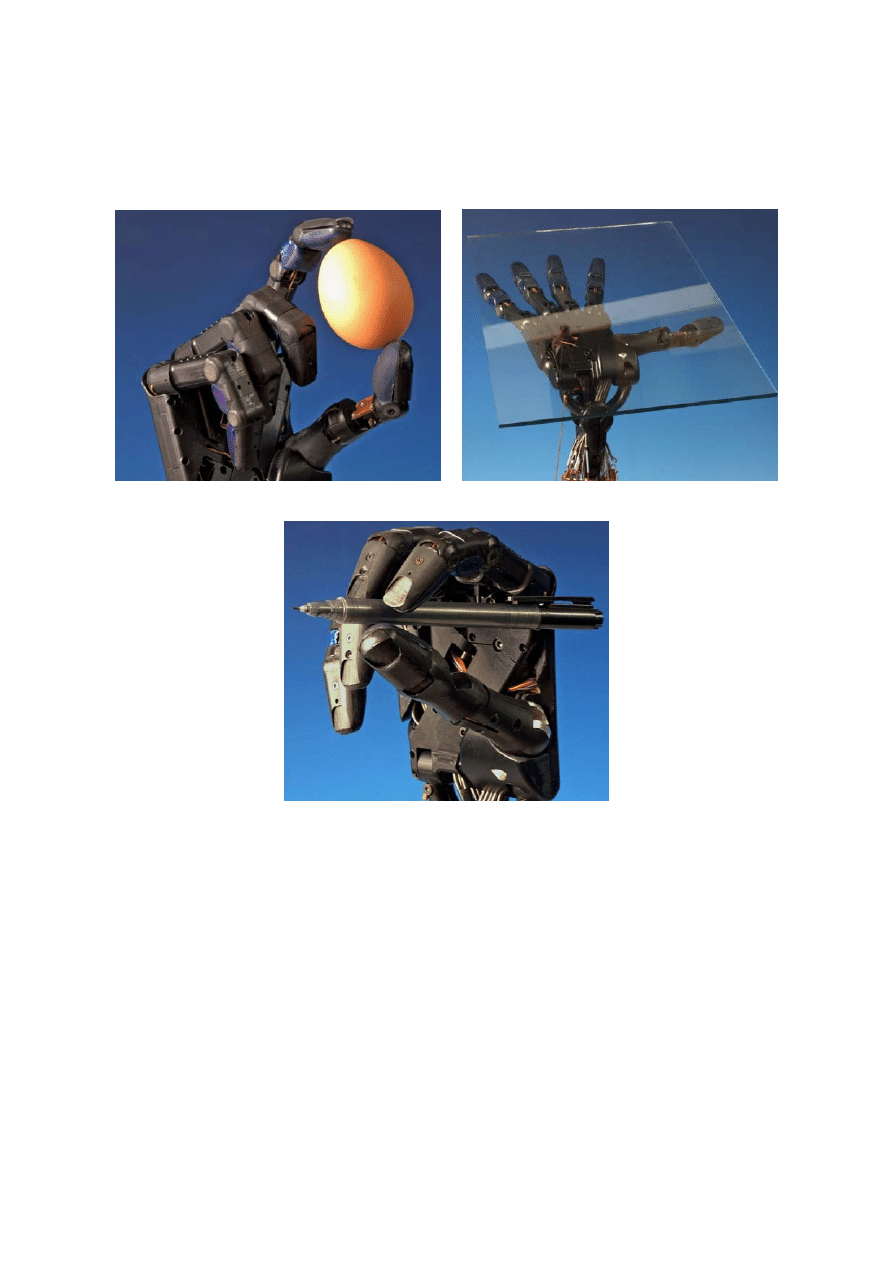
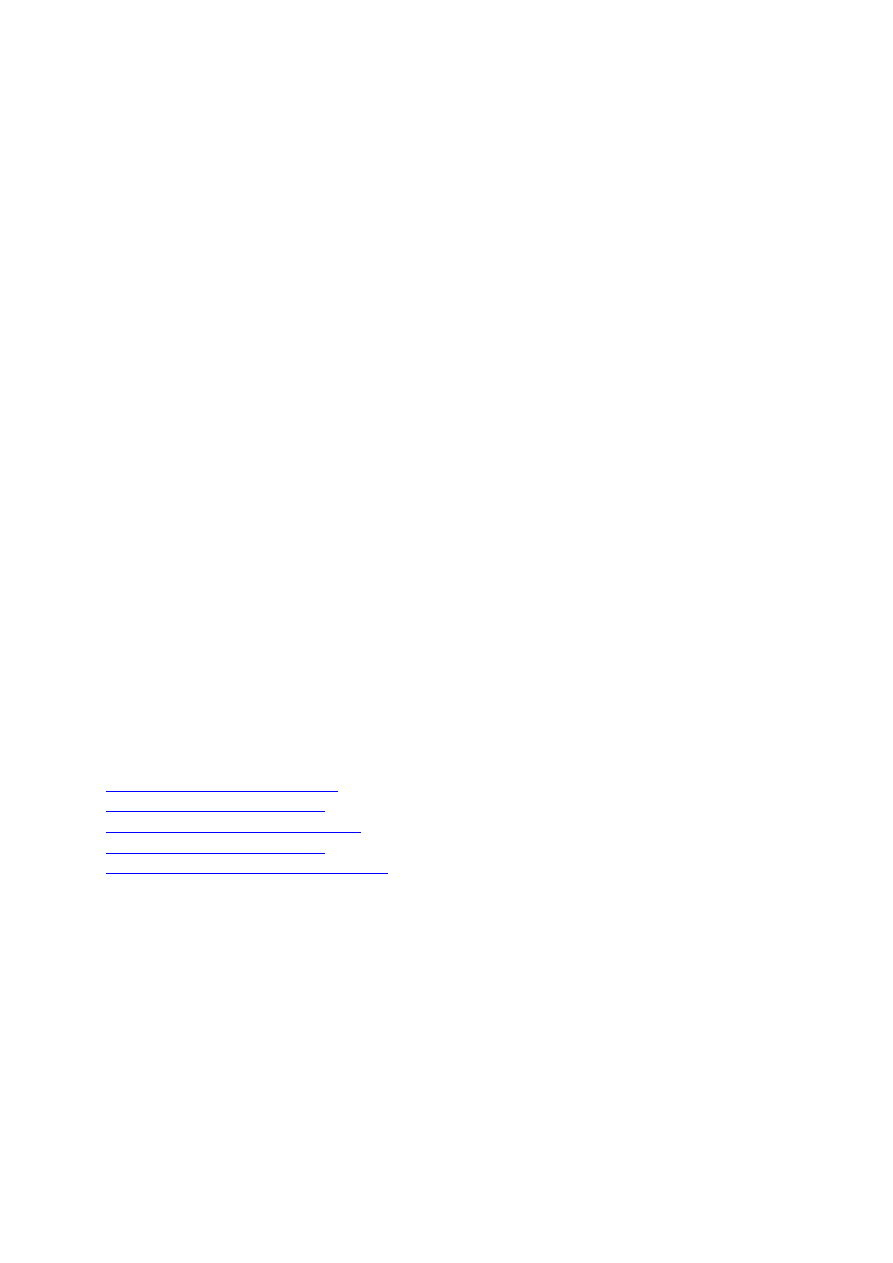
układu. Przedstawione poniżej rysunki pokazują możliwości jakie niesie ze sobą to
rozwiązanie.
rys. 4.1.3 Aeroręka trzymająca jako
rys.4.1.4 Aeroręka trzymająca szybę
rys. 4.1.5 Aeroręka trzymająca długopis
Przy odpowiednim zaprogramowaniu przepływu powietrza możliwe jest chwycenie
bardzo delikatnych przedmiotów bez uszkodzenia ich. Możliwe jest także chwycenie
przedmiotu w sposób taki jak to robi człowiek np. szyby czy długopisu. Aeroręka jest częścią
całego projektu tworzenia w oparciu o tę technologię robota o nazwie Shadow.
4.2. Przyszłe wykorzystania androidów
Androidy, jako iż mają ludzki wygląd i w przyszłości zapewne takie same możliwości
ruchowe, będą mogły korzystać z narzędzi, którymi na co dzień posługuje się człowiek.
Pozwoli to na wykorzystanie ich do ciężkich prac, które obecnie wykonuje człowiek. Nie
należy się raczej obawiać zmniejszenia liczby miejsc pracy dla ludzi, gdyż przemysł budowy
androidów prawdopodobnie stworzy ich znacznie więcej. Przemysł ten szacuje się że osiągnie
rozmiary przemysłu samochodowego z XX w. mowa tu o obrotach ok. 1 tryliona $ na rok.
13
Połączenie androidów z internetem da im nieograniczony zasób wiedzy, przez co
mogłyby przekazywać dzieciom podstawową wiedzę o świecie. W dalszej przyszłości
przewiduje się, że będą mogły one budować inne androidy, naprawiać się same oraz
konserwować swoje podzespoły. Z pewnością wykorzystane zostaną także do eksploracji
miejsc niedostępnych dla człowieka jak przestrzeń kosmiczna czy też do pracy w warunkach
szkodliwych dla człowieka np. promieniowanie.
4.3. Bunt maszyn
Wraz ze wzrostem inteligencji androidów i ogólnie robotów rodzi się pytanie, czy będą one
mogły kiedykolwiek wystąpić przeciwko swym twórcom. Na dzień dzisiejszy jest to wielce
nieprawdopodobne. W robotach stosuje się zabezpieczenie programowe w postaci praw
Asimova:
I. Robot nie może skrzywdzić człowieka, ani przez zaniechanie akcji dopuścić do jego
skrzywdzenia
II. Robot musi wykonywać polecenia wydane przez człowieka, za wyjątkiem tych,
które kolidują z pierwszym prawem
III. Robot musi chronić sam siebie tak długo jak długo nie koliduje to z pierwszym
i/lub drugim prawem
Z tak zdefiniowanymi prawami mogą wystąpić pewne pułapki. Dostarczający zatrute
pożywienie robot bezpośrednio przyczyni się do śmierci człowieka. Takich pułapek jest
więcej, tylko że są to sytuacje, w których ludzie zabijają ludzi, a roboty są nieświadomymi
narzędziami.
Kolejnym problemem jest wykorzystywanie robotów, a w przyszłości pewnie i
androidów w działaniach militarnych. Roboty takie z pewnością nie będą posiadały
zabezpieczeń nie pozwalających im niszczyć przeciwnika. Zatem odpowiedź na ostatnie
pytanie czy powinniśmy się obawiać - zależy od twórców androidów. Być może od kogoś
spośród nas. Mało prawdopodobne natomiast jest aby androidy uzyskały świadomość i
zbuntowały się przeciwko swoim twórcom, jako ich zagrożeniu.
Bibliografia
http://world.honda.com/ASIMO
http://www.androidworld.com
http://www.automates-anciens.com
http://www.roboty.po.opole.pl
http://www.shadow.org.uk/index.shtml
Wyszukiwarka
Podobne podstrony:
PR ETI W 14 4 4
PR ETI W 14 6 1
PR ETI W 14 3 1
PR ETI W 14 8 1
PR ETI W 14 5 1
PR ETI W 14 11 1 id 382129 Nieznany
PR ETI W 14 12 1
PR ETI W 14 4 4
PR ETI W 14 6 1
PR ETI W 3 4 3 5
PR ETI W 2
PR ETI W 1 4
PR ETI W 1 3
PR ETI W 1 3
PR ETI W 21 1
PR ETI W 25 6
PR ETI W 22 1
serwis pr, ETI SUM, sem 1
więcej podobnych podstron