
PODSTAWY ROBOTYKI
JW 1.3

Definicje i klasyfikacja robotów przemysłowych
1. Definicje podstawowe
Do dalszych rozważań przyjęto dwa podstawowe określenia, a mianowicie:
Manipulator - część mechaniczna, czyli maszyna przeznaczona do realizacji niektórych
funkcji kończyn górnych człowieka.
Robot - urządzenie przeznaczone do realizacji niektórych czynności manipulacyjnych i
lokomocyjnych człowieka, mające pewien określony poziom inteligencji maszynowej.
Podstawowym pojęciem w robotyce jest robot, określany również w literaturze jako
maszyna manipulacyjna z programowanym ruchem. W literaturze technicznej istnieje wiele
definicji określających robota przemysłowego. W każdej w różnym stopniu wyszczególniono
cechy charakteryzujące te urządzenia. Zaliczyć do nich można: możliwość wykonywania
głównych lub pomocniczych czynności w zależności od procesu technologicznego (np.
zgrzewanie lub manipulacja przedmiotem), co wymaga kilku niezależnych stopni swobody
(np. co najmniej dwóch), programowalność, tj. możliwość odtwarzania nauczonych w
procesie uczenia ruchów oraz zmiany programu w zależności od potrzeb.
Podstawową definicję robota można znaleźć w Encyklopedii Powszechnej PWN:
„Robot - urządzenie (maszyna) przeznaczone do realizacji niektórych czynności
manipulacyjnych, lokomocyjnych, informacyjnych i intelektualnych człowieka”.
Definicja robota wg normy ISO ITR 8373:
„Manipulacyjny robot przemysłowy jest automatycznie sterowaną, programowaną,
wielozadaniową maszyną manipulacyjną o wielu stopniach swobody, posiadającą własności
manipulacyjne lub lokomocyjne, stacjonarną lub mobilną, dla ważnych zastosowań
przemysłowych".
Według Moreckicgo „robot to urządzenie techniczne przeznaczone do realizacji
niektórych czynności manipulacyjnych i lokomocvjnvch człowieku, mające określony poziom
energetyczny, informacyjny i sztucznej inteligencji (autonomii działania w pewnym
środowisku)". Morecki definiuje również robota przemysłowego jako szczególny przypadek
robota: „urządzenie techniczne do zastępowania człowieka przy wykonywaniu określonych
czynności manipulacyjnych, przystosowane do realizacji rożnych, łatwo zmienianych
programów ruchu manipulacyjno-transportowego, użytecznego w procesie produkcyjnym”.
Niederliński stwierdza, że „roboty są narzędziami sterowanymi automatycznie,
dającymi się zaprogramować do wykonania dużej liczby różnorodnych sekwencji
precyzyjnych czynności manipulacyjnych, jak np. uchwycenie przedmiotu, przemieszczenie
przedmiotu (przeniesienie, obrócenie), pozostawienie przedmiotu w określonej pozycji, w
kreślonym miejscu (zakładanie, zdejmowanie). Sekwencje wymienionych czynności mogą być
uzależnione od stanu obsługiwanego narzędzia oraz manipulowanego przedmiotu i mogą
z kolei sterować obsługiwanym narzędziem”. Jak stwierdzają Buda i Kovač „pojęciem robot
przemysłowy nie należy obejmować nieprogramowanych, jednozadaniowych automatów
czynnościowych, sterowanych przez człowieka urządzeń nianipulacyjnych (manipulatory)
oraz urządzeń, w których człowiek stanowi jeden z elementów układu (teleoperatory)”.
Jednakże, jak pisze Jaroń, „cała nauka o robotach znajduje się jeszcze w powijakach, a próby
jej sformalizowania, łącznie z ogólną definicją robotów są jeszcze w studium początkowym”.
Reasumując, można powiedzieć, że: „Pod pojęciem robot przemysłowy rozumie się
manipulator wielofunkcyjny, skonstruowany dla przenoszeniu materiałów, części, narzędzi
lub specjalnych przyrządów mający programowane ruchy w celu wykonania różnorodnych
zadań”. Zasadnicze znaczenie w tej definicji ma programowalność i różnorodność
wykonywanych ruchów.

2. Klasyfikacja robotów przemysłowych
Jak już stwierdzono, nauka o robotach nie jest jeszcze w pełni sformalizowana i jako
nauka interdyscyplinarna, związana z mechaniką, sterowaniem, inteligencją maszynową i
zagadnieniami społecznymi, jest szczególnie trudna do zdefiniowania. Stąd też spotyka się w
literaturze różne ujęcia problemu klasyfikacji robotów.
Klasyfikację robotów przemysłowych można prowadzić na podstawie różnych,
podanych dalej wyróżników. Roboty przemysłowe można klasyfikować, biorąc pod uwagę
zasadnicze cechy budowy, rodzaj sterowania lub inne kryteria podziału, np. dokładność
pozycjonowania, mobilność.
2.1. Klasyfikacja robotów ze względu na budowę jednostki kinematycznej
Ze względu na sposób budowy jednostki kinematycznej maszyn manipulacyjnych dzieli
się je na: monolityczne, modułowe i pseudoodułowe.
Do jednostek monolitycznych zalicza się jednostki kinematyczne o niezmienialncj
konstrukcji mechanizmu (stałej strukturze kinematycznej). Konstrukcję monolityczną
użytkownik może co najwyżej uzupełnić chwyta kiem, narzędziem oraz dopuszczonymi przez
producenta (opcyjnymi) zespołami ruchu.
Jednostki modułowe producent dostarcza w postaci oddzielnych zespołów ruchu
(modułów) - użytkownik zestawia z nich mechanizm o zaprojektowanej odpowiednio do
potrzeb strukturze kinematycznej. Jakkolwiek producent nie ogranicza zbioru możliwych do
zestawienia struktur, to jednak z reguły narzuca porządek łączenia modułów, określony
statyczną i dynamiczną wytrzymałością konstrukcji, charakterystykami napędów (np.
udźwigiem) itp.
Jednostki pseudomodułowe to jednostki kinematyczne o stałej, podobnie jak w
rozwiązaniach monolitycznych, strukturze kinematycznej, ale o dopuszczonej przez
producenta możliwości wymiany przez użytkownika robota niektórych zespołów ruchu, z
reguły ostatnich w łańcuchu kinematycznym zespołów ruchu.
2.2. Klasyfikacja robotów ze względu na strukturę kinematyczną
Klasyfikację robotów przemysłowych pod względem struktury kinematycznej pokazano
na rys. 1.
Ze względu na strukturę kinematyczną zespoły mechaniczne robotów przemysłowych
mogą być rozwiązane jako:
roboty stacjonarne,
lub
roboty mobilne, które mogą przemieszczać się względem podłoża.
Oczywiście możliwe jest także połączenie obu tych układów.
Manipulatory, czyli jednostki kinematyczne robotów, są zbudowane jako układ członów
połączonych ruchowo za pomocą tzw. par kinematycznych. Człony te mogą być łączone:
szeregowo, tworząc otwarty łańcuch kinematyczny,
równolegle, tworząc zamknięty łańcuch kinematyczny.
Wśród tradycyjnych rozwiązań robotów stacjonarnych o szeregowym układzie
kinematycznym wyróżnia się grupy typowych rozwiązań, charakteryzujących się podobnym
układem zespołów ruchu (strukturą kinematyczną), definiowanym przez tzw. naturalny dla
danej struktury układ osi współrzędnych oraz formę przestrzeni roboczej. W tej grupie
robotów można wyróżnić następujące zasadnicze rozwiązania konstrukcyjne.
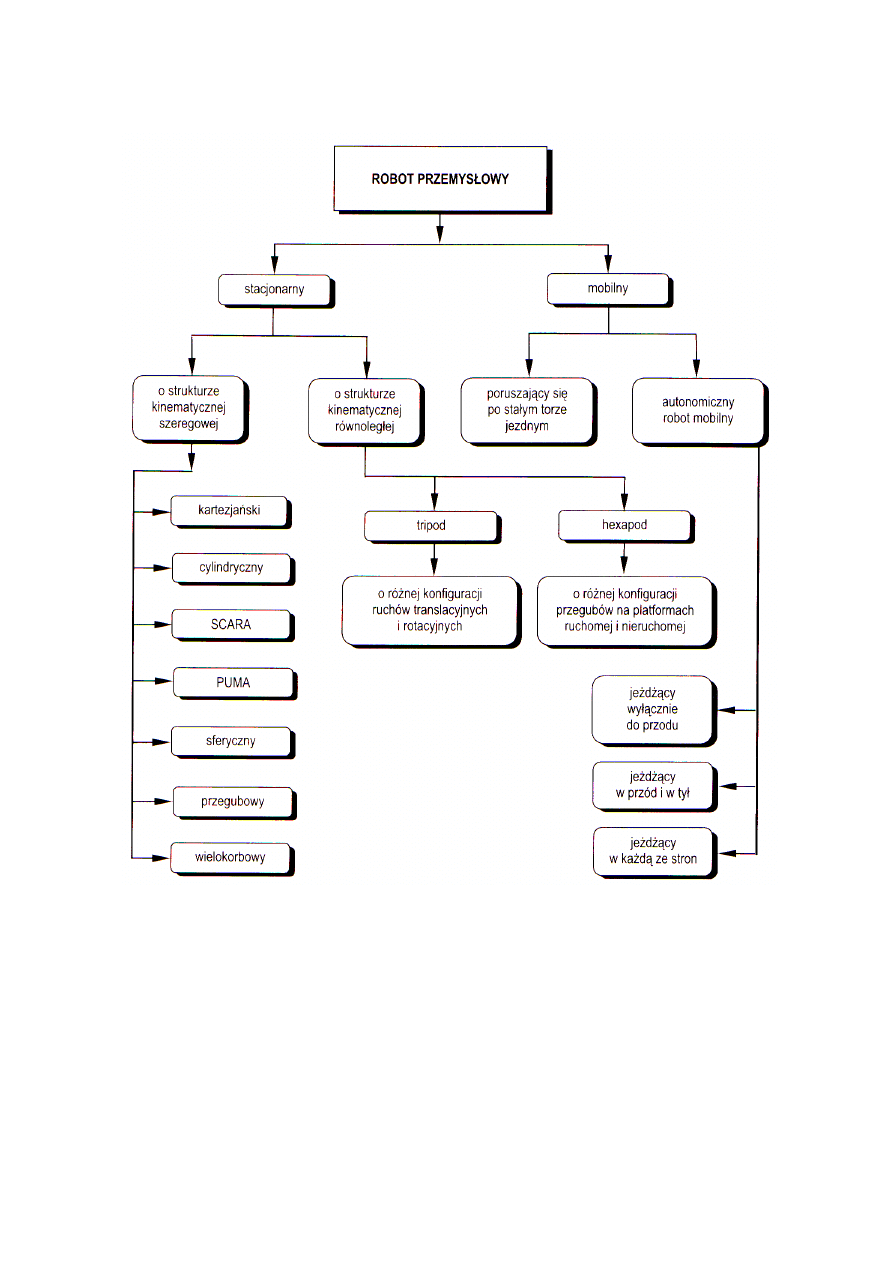
Rys. 1. Klasyfikacja robotów przemysłowych
1) Robot w układzie kartezjańskim (prostokątnym), o prostokątnym układzie osi
współrzędnych, o trzech liniowych zespołach ruchu regionalnego oraz prostopadłościennych
przestrzeniach ruchu - rys. 2a. Konfiguracja ma prostokątny układ osi współrzędnych oraz
prostopadłościenną przestrzeń ruchu.
2) Robot w układzie cylindrycznym, o jednym obrotowym i dwóch liniowych zespołach
ruchu regionalnego, walcowym układzie osi współrzędnych oraz cylindrycznych
przestrzeniach ruchu - rys. 2b. Jak sugeruje nazwa, zmienne przegubowe są zarazem
współrzędnymi cylindrycznymi końcówki roboczej względem podstawy. Konfiguracja
cylindryczna ma walcowy układ osi współrzędnych oraz cylindryczne przestrzenie ruchu.

3) Robot SCARA (ang. selectively compliant assembly robot arm). Jak wynika z nazwy
angielskiej (tłum. selektywnie podatne ramię robota montażowego), robot ten zaprojektowano
z myślą o zadaniach montażowych, ma on trzy osie równoległe, dwie o ruchu obrotowym, a
jedną o postępowym - rys. 2c. Konfiguracja SCARA ma strukturę RRP, jednak różni się
zdecydowanie od konfiguracji sferycznej zarówno wyglądem, jak i możliwościami
zastosowania.
4) Robot PUMA (ang. programmable universal manipulator for assembly) jest
przeznaczony specjalnie do zadań montażowych - rys. 2d. Robot o konfiguracji PUMA ma
strukturę kinematyczną taką, jak robot przegubowy, ale różni się od niego wyglądem i
możliwymi zastosowaniami.
5) Robot o strukturze sferycznej, o jednym liniowym oraz dwóch obrotowych zespołach
ruchu regionalnego, jest przedstawiony na rys. 2e.
6) Robot o strukturze przegubowej (rys. 2f) nazywany również manipulatorem obrotowym
lub manipulatorem antropomorficznym ma wszystkie obrotowe osie zespołów ruchu
regionalnego.
7) Robot wielokorbowy - rys. 2g.
Częstość występowania określonych struktur kinematycznych dla podstawowych
układów współrzędnych przemieszczenia ramienia robota była przedmiotem wielu analiz oraz
ocen. Stwierdzono w najnowszych rozwiązaniach wysoki wzrost udziału procentowego par
kinematycznych realizujących układ współrzędny sferyczny i przegubowy ze wskazaniem
zdecydowanej przewagi trzech par obrotowych (przyrost z 2 do 20% w latach 1974- 1984).
Wydaje się, że tendencja będzie się utrzymywać ze względów eksploatacyjnych (np.
możliwość przenoszenia znacznych ciężarów) oraz dużej objętości przestrzeni roboczej. W
przypadku robotów przeznaczonych do obsługi obrabiarek dominuje jednak układ
prostokątny.
Rozwiązania jednostek kinematycznych o bardziej złożonych układach zespołów ruchu
regionalnego lub zwielokrotnionych łańcuchach kinematycznych są z reguły odpowiednią
kombinacją wymienionych struktur.
Oprócz struktury jednostki kinematyczne maszyn manipulacyjnych charakteryzują się
różnymi właściwościami mechanizmu. Zalicza się do nich:
sposób budowy mechanizmu jednostki kinematycznej,
właściwości napędowe zespołów ruchu, w tym przede wszystkim rodzaj energii
wykorzystywanej w napędach oraz charakterystyka napędu.
W grupie robotów stacjonarnych o strukturach równoległych głównym wyróżnikiem
podziału jest liczba ramion (gałęzi) tworzących zamknięty łańcuch kinematyczny. Spotykane
są rozwiązania z trzema ramionami - tripody i sześcioma ramionami – hexapody.
Ze względu na rozwiązania kinematyczne roboty mobilne można podzielić na: roboty
przemieszczające się po stałym torze jezdnym i autonomiczne roboty mobilne (czasem zwane
też r obocarami), które mogą poruszać się samodzielnie po hali fabrycznej.
Na rys. 3 pokazano układy kinematyczne robotów poruszających się po sztywnym torze
jezdnym. Istotą budowy robotów mobilnych przemieszczających się po sztywnym torze
jezdnym jest połączenie zrobotyzowanej jednostki transportowej (robot transportowy) z
odpowiednim robotem stacjonarnym.
Układy kinematyczne autonomicznych robotów mobilnych (rys. 4) dzieli się obecnie na
trzy grupy: mogące poruszać się wyłącznie do przodu, jeżdżące w przód i w tył oraz jeżdżące
wzdłuż i w poprzek w każdą ze stron.
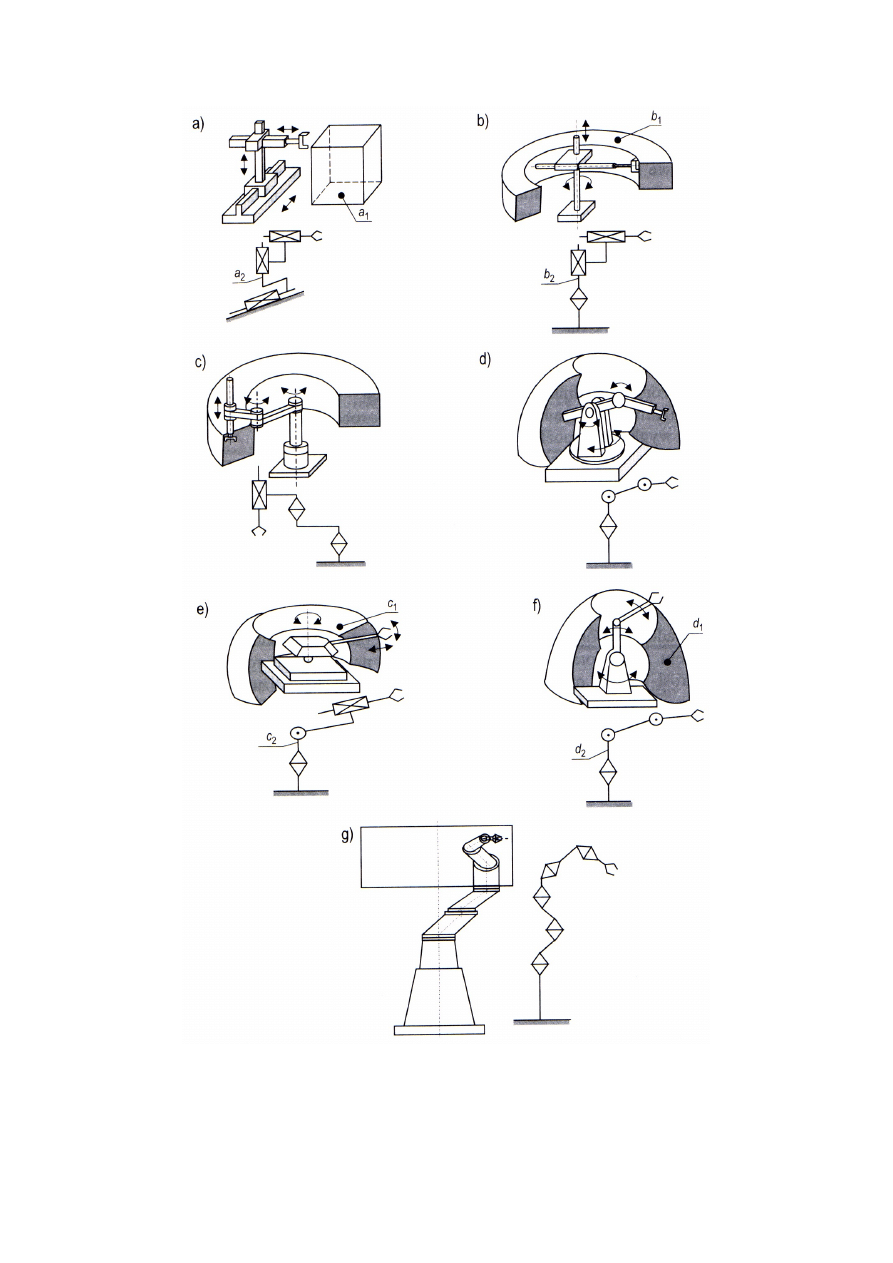
Rys. 2. Struktury i przestrzenie robocze robotów stacjonarnych o szeregowym układzie
kinematycznym: a) kartezjańska, b) cylindryczna, c) SCARA, d) PUMA, e) sferyczna, f)
przegubowa, g) wielokorbowa
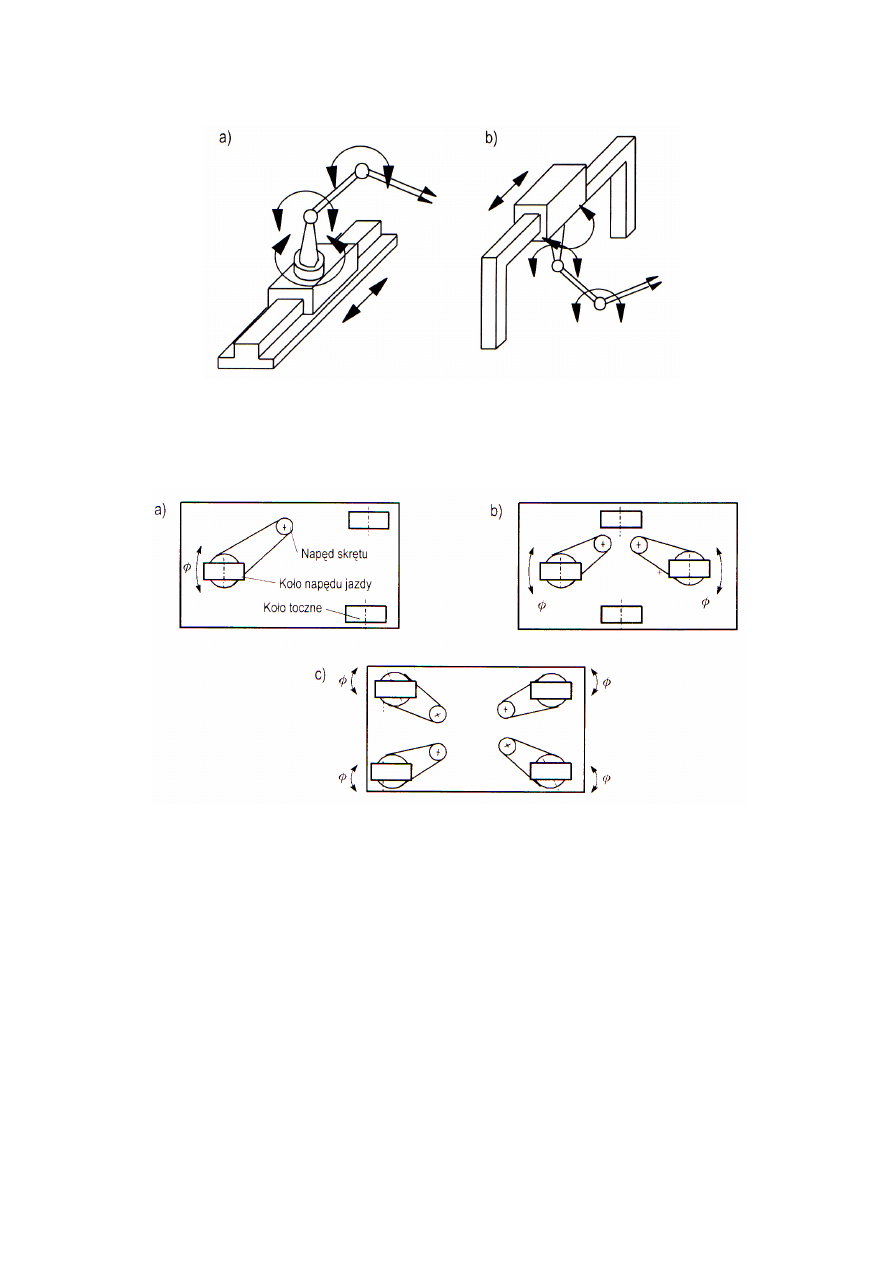
Rys. 3. Układy kinematyczne robotów poruszających się po sztywnym torze jezdnym: a)
robot zainstalowany na wózku szynowym, b) mobilny robot bramowy
Rys. 4. Układy kinematyczne autonomicznych robotów mobilnych: a) robot poruszający się
wyłącznie do przodu, b) robot jeżdżący w przód i w tył, c) robot jeżdżący wzdłuż i w poprzek
w każdą ze stron
2.3. Klasyfikacja robotów ze względu na sterowanie
Ze względu na sterowanie roboty klasyfikuje się na klasy, przy czym wyróżnikiem
klasy jest rodzaj i możliwości sterowania pracą robota. Wyróżnia się cztery podstawowe klasy
robotów przemysłowych:
1) Robot sekwencyjny. Jest to robot wyposażony w sekwencyjny (wykonujący kolejno
zaprogramowane ruchy i czynności) układ sterowania.
2)
Robot realizujący zadane trajektorie. Jest to robot, który realizuje ustaloną procedurę
sterowanych ruchów według instrukcji programowych specyfikujących żądane pozycje oraz
żądaną prędkość ruchu.
3)
Robot adaptacyjny. Jest to robot mający sensoryczny lub adaptacyjny bądź uczący się
układ sterowania. Przykładami takich układów są układy o możliwościach zmiany własności
dzięki wykorzystaniu informacji sensorycznych lub nagromadzonych doświadczeń,
planowania zadań lub przez nauczanie i trening. Typowym przykładem jest tutaj robot
wyposażony w czujniki wizyjne, przez co jest możliwa korekta ruchów podczas pobierania
elementów, montażu lub spawania łukowego.
4)
Teleoperator. Jest to robot ze sterowaniem zdalnym, realizowanym przez operatora lub
komputer. Jego funkcje są związane z przenoszeniem na odległość funkcji motorycznych i
sensorycznych operatora. Wyłącza się z tej klasy manipulatory o połączeniach
mechanicznych.
Ze względu na sposób programowania i możliwości komunikowania się robota ze
środowiskiem zewnętrznym (otoczeniem) można podzielić roboty na trzy generacje:
I - roboty nauczane,
II roboty uczące się,
III - roboty inteligentne.
Te zagadnienia omówiono poprzednio.
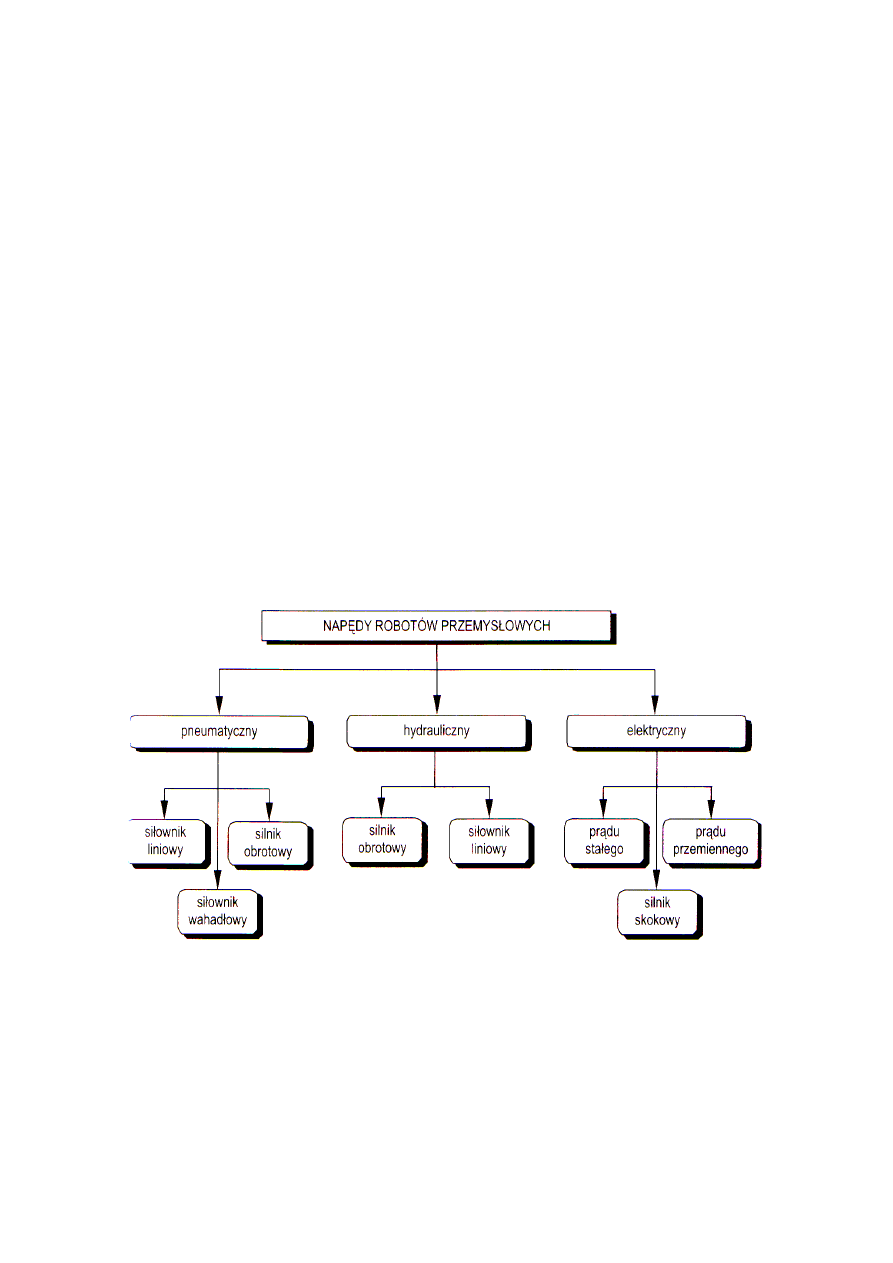
2. 4. Klasyfikacja robotów ze względu na liczbę stopni swobody i rodzaj napędu
Współczesne roboty przemysłowe mają dużą liczbę stopni swobody (z reguły 5-7):
każdemu z tych stopni, tzn. każdej parze kinematycznej, odpowiada oddzielny zespół
napędowy. Aby zrealizować konkretną operację technologiczną lub manipulacyjną, należy
sterować grupą elementów wykonawczych. W zależności od rodzaju energii potrzebnej do
wprawiania w ruch mechanizmów robota rozróżnia się napędy: pneumatyczne, hydrauliczne
(precyzyjniej elektrohydrauliczne) i elektryczne, których uproszczoną klasyfikację pokazano
na rys. 1.3.5.
Rys. 3.5. Klasyfikacja robotów ze względu na rodzaj stosowanego napędu
Obecnie większość robotów jest wyposażona w napędy elektryczne i tylko w
nielicznych robotach przemysłowych jest stosowany napęd pneumatyczny lub
hydrauliczny. Należy podkreślić, że napędy elektryczne charakteryzują się stosunkowo dużą
całkowitą sprawnością przetwarzania energii i dlatego są obecnie powszechnie stosowane w
robotyce.

2.5. Klasyfikacja robotów ze względu na inne kryteria
Często spotyka się również inne klasyfikacje robotów w zależności od innych kryteriów
podziału. Według kryterium przeznaczenia można wyróżnić roboty do celów:
przemysłowych,
naukowych i szkoleniowych,
badawczych pod wodą,
w przestrzeni kosmicznej,
medycznych,
specjalnych i inspekcyjnych, np. do walki z terrorystami,
do innych zadań.
Document Outline
Wyszukiwarka
Podobne podstrony:
PR ETI W 14 4 4
PR ETI W 14 6 1
PR ETI W 14 3 1
PR ETI W 3 4 3 5
PR ETI W 2
PR ETI W 1 4
PR ETI W 1 3
PR ETI W 14 8 1
PR ETI W 21 1
PR ETI W 25 6
PR ETI W 22 1
serwis pr, ETI SUM, sem 1
PR ETI W 3 1 3 3 3
PR ETI W 23 2 id 382135 Nieznany
PR ETI W 21 1
PR ETI W 11 id 382128 Nieznany
PR ETI W 14 5 1
PR ETI W 9 id 382139 Nieznany
PR ETI W 3 4 3 6
więcej podobnych podstron