iii
Energy
Management Systems
and
Direct Digital Control
Richard A. Panke, CEM
MARCEL DEKKER, INC.
New York and Basel
THE FAIRMONT PRESS, INC.
Lilburn, Georgia
©2002 by The Fairmont Press

Library of Congress Cataloging-in-Publication Data
Panke, Richard A.
Energy management systems and direct digital control/Richard A.
Panke.
p. cm.
Includes bibliographical references and index.
ISBN 0-88173-395-4 (electronic)
1. Buildings--Energy conservation. 2. Buildings--Electric equip-
ment. 3. Digital control systems. I. Title.
TJ163.5.B84 P34 2001
658.2--dc2l
2001023849
Energy management systems and direct digital control/Richard A. Panke.
©2002 by The Fairmont Press. All rights reserved. No part of this
publication may be reproduced or transmitted in any form or by any
means, electronic or mechanical, including photocopy, recording, or
any information storage and retrieval system, without permission in
writing from the publisher.
Fairmont Press, Inc.
700 Indian Trail, Lilburn, GA 30047
tel: 770-925-9388; fax: 770-381-9865
Distributed by Marcel Dekker, Inc.
270 Madison Avenue, New York, NY 10016
tel: 212-696-9000; fax: 212-685-4540
Printed in the United States of America
10 9 8 7 6 5 4 3 2 1
0-88173-395-4 (The Fairmont Press, Inc.)
0-8247-0920-9 (Marcel Dekker, Inc.)
While every effort is made to provide dependable information, the publisher, authors,
and editors cannot be held responsible for any errors or omissions.
©2002 by The Fairmont Press

Contents
Chapter
Training/Operation/Maintenance
Design/Drawings/Specifications
©2002 by The Fairmont Press

I
NTRODUCTION
1
Chapter 1
Introduction
EMS DEFINED
MS defined: A system which employs microprocessors, building
field panels, communication cables between field panels, control
equipment, and software application programs configured into
a network with control functions at multiple locations and a point of
operator supervision and control (see
).
Central EMSs are of various levels of sophistication depending on
the size of the building and desired operational function. The simplest
system allows an operator to check the operational status of the heating,
ventilating and air conditioning (HVAC), fire and security systems, and
control various equipment remotely from a central console. The next
level system (“direct digital control”—DDC) has a digital computer to
perform most of the work normally done by the operator, plus other
optimization and control functions.
Previously, EMS terminology included statements such as “com-
munication” between the field panels and the Central Processing Unit
(CPU). Current EMSs no longer require a CPU, nor do they rely on a
CPU for system operation!
CONVENTIONAL PNEUMATIC CONTROLS
Conventional pneumatic controls have been the traditional form of
control used in most commercial and institutional facilities for environ-
E
©2002 by The Fairmont Press
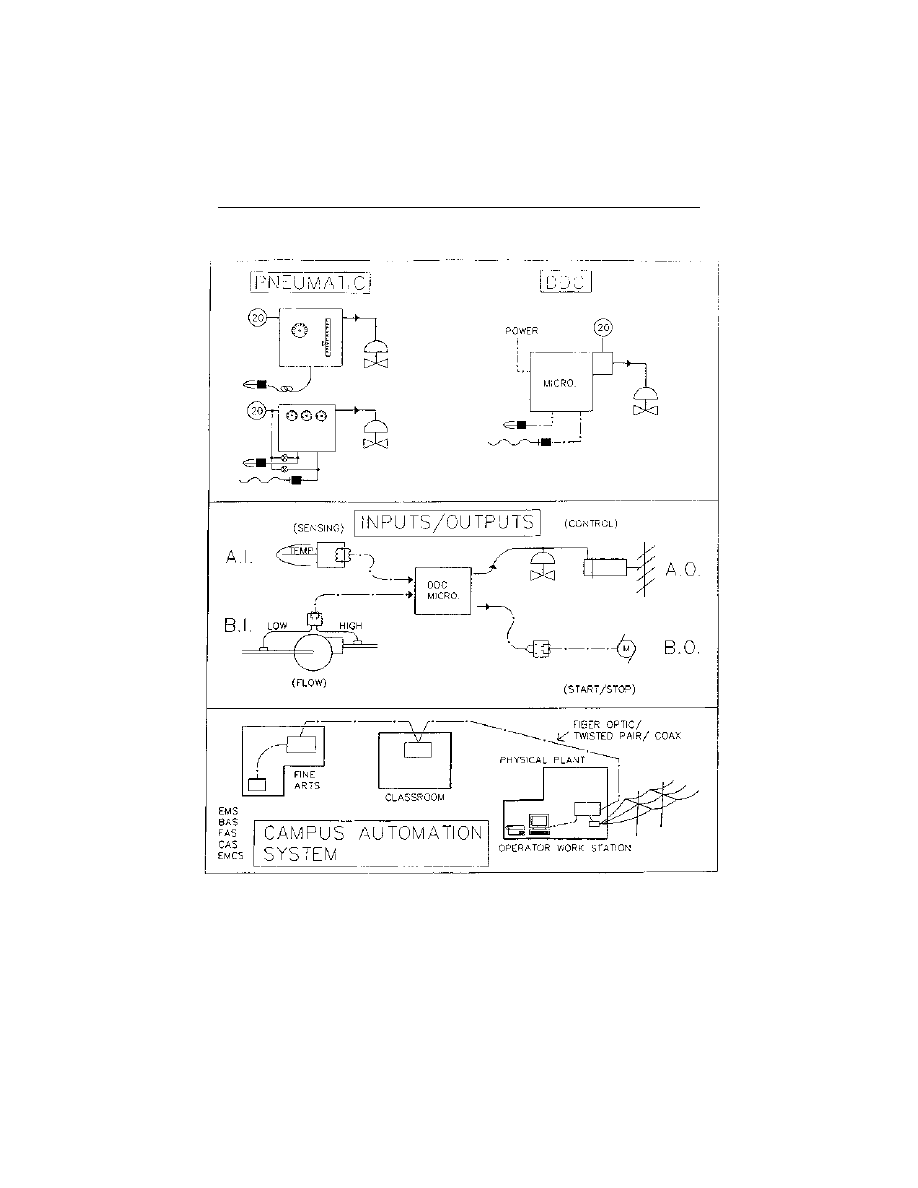
Figure 1-1. Pneumatic to Automation Via DDC
©2002 by The Fairmont Press
mental control. The control function is performed by a pneumatic con-
troller which receives its inputs from pneumatic sensors and sends con-
trol signals to pneumatic actuators (see
In the 1970’s, a supervisory system was often interfaced to the
pneumatic control system to allow remote control (remote set point or
control point adjustment) of pneumatic receiver controllers and central-
ized monitoring through electronic sensors. The remote electronic panels
communicate to a central computer; however, if the communications
line was broken, or if the computer failed, the entire system was OFF
(see
DIRECT DIGITAL CONTROL (DDC)
Direct Digital Control (DDC), although used for years in the pro-
cess industry, entered the HVAC industry in the late 1980’s. DDC utilizes
a programmable microprocessor as the primary controller. The HVAC
system variable (temperature) is measured by electronic sensors. The
control functions are performed by a microprocessor which transmits an
electronic or transduced pneumatic control signal directly to the con-
trolled device (damper or valve actuator).
DDC is a form of closed-loop control. The term “Direct” means the
microprocessor is directly in the control loop and the term “Digital”
means control is accomplished by the digital electronics of the micropro-
cessor. As opposed to electronic controls, which are much like pneu-
matic controls where each controller handles one control loop in a fixed
manner, DDC can control numerous control loops and be repro-
grammed for different control functions without hardware changes (see
Distributed DDC consists of several DDC units located throughout
a building complex. Although, each DDC can operate independently,
they are all connected to a central operator station for centralized control
and monitoring. A measure of a true distributed DDC system is whether
the remote DDC units continue to perform full control and energy
management, without the central operator station (see
DDC
will be covered in greater detail in
able 1-1 for a comparison of pneumatics and DDC.
©2002 by The Fairmont Press
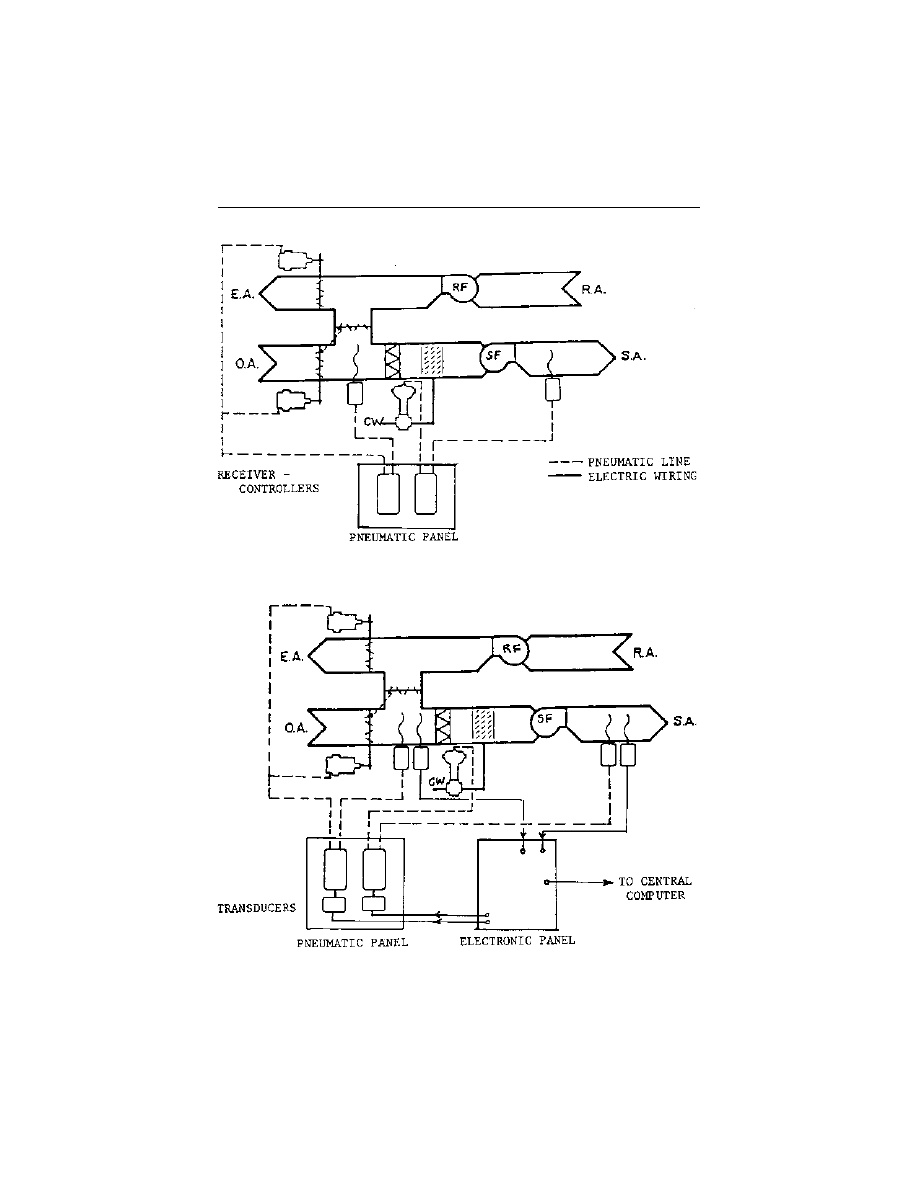
Figure 1-2. Pneumatic Control
Figure 1-3. Supervisory Automation System
©2002 by The Fairmont Press
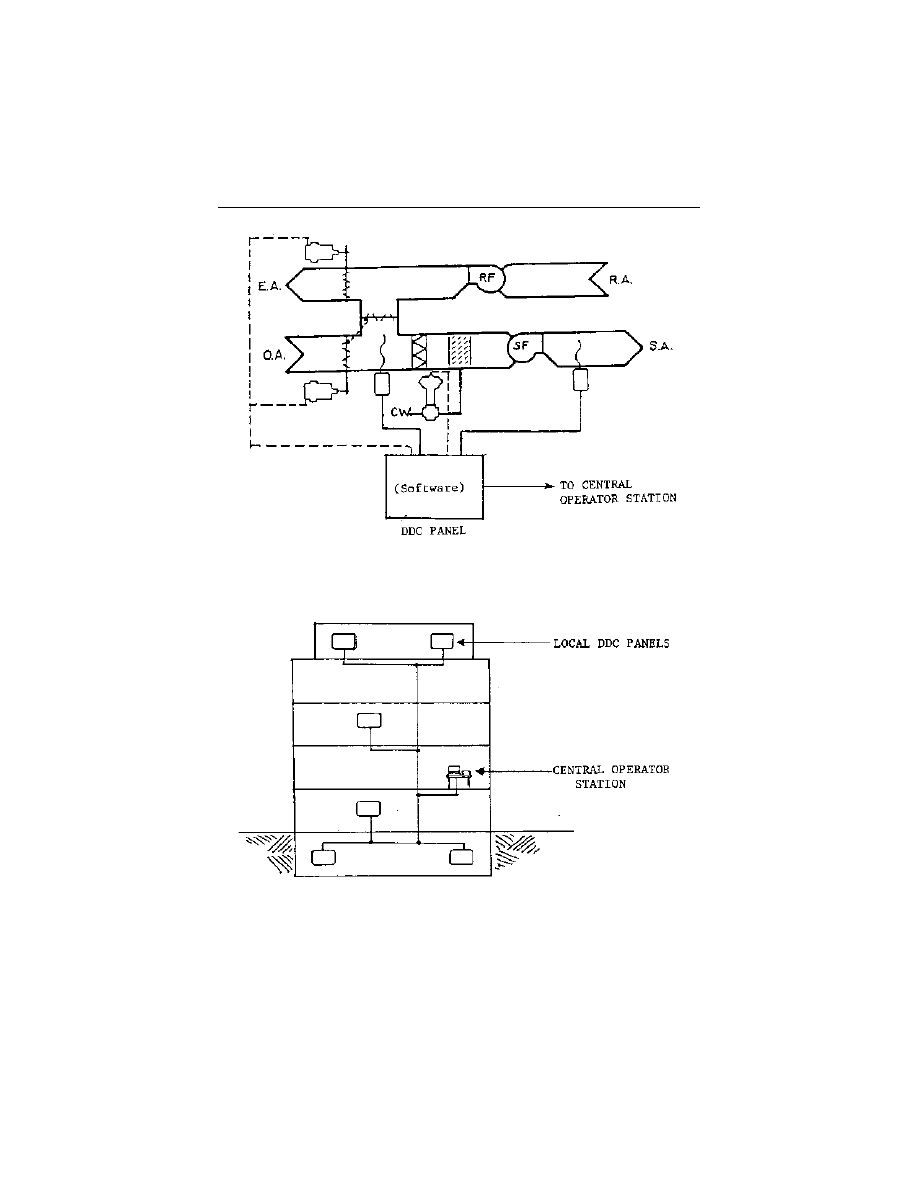
Figure 1-4. Direct Digital Control
©2002 by The Fairmont Press
Table 1-1. Comparison of Pneumatics and Direct Digital Control
——————————————————————————————————————————————
COMPARISON
CONVENTIONAL
BEST CONTROL
CATEGORY
PNEUMATIC CONTROLS
DIRECT DIGITAL CONTROL
SYSTEM
——————————————————————————————————————————————
Performance
• Proportional control only.
• Full PID control and more.
DDC
• Single loop controllers.
• Multi-loop controller.
• Complex control is difficult
• Easy to define complex sequences.
or costly.
• Closer control.
• Adequate control.
——————————————————————————————————————————————
Initial Cost
• Cost rises with number of
• Once cost of DDC controller is
Comparable
control loops.
absorbed, cost rises with number of
• Complex control is very
sensors and actuators.
expensive.
• Capable of most complex control.
——————————————————————————————————————————————
Reliability
• Proven reliability over many
• Proven reliability in process
DDC
years, however, control system
industry and many commercial
must be well maintained and
HVAC applications.
recalibrated regularly.
• Each DDC controller can stand alone.
• Relies on air supply.
——————————————————————————————————————————————
Maintainability
• Relatively easy to maintain.
• Automatic as-builts.
DDC
• Require regular recalibration
• Built-in diagnostics.
due to drift.
• Fewer components.
• No drift.
• Service by board replacement.
©2002 by The Fairmont Press
Table 1-1. Comparison of Pneumatics and Direct Digital Control (Continued)
——————————————————————————————————————————————
COMPARISON
CONVENTIONAL
BEST CONTROL
CATEGORY
PNEUMATIC CONTROLS
DIRECT DIGITAL CONTROL
SYSTEM
——————————————————————————————————————————————
Flexibility
• Changes or additions require
• Programmable controller.
DDC
new or different controllers
• New control strategies defined at central.
re-piping and often wiring, and • New control easily added.
then recalibration.
——————————————————————————————————————————————
Ease of Use
• All operator interaction at
• Full English language reports.
DDC
local control panels.
• Color Graphic Displays
• Can read temperatures and
• Automatic Records of all control
change set-point.
strategies.
——————————————————————————————————————————————
Life Cycle Cost
• Requires regular recalibration. • Easy to maintain.
DDC
• Modification and expansion
• Easy to modify.
require additional controllers.
• Easy to expand.
——————————————————————————————————————————————
Cost to Add Energy • Each new function usually
• New functions are easily defined
DDC
Management
requires additional equipment
by operator.
and labor.
——————————————————————————————————————————————
©2002 by The Fairmont Press

EMS O
VERVIEW
9
Chapter 2
EMS Overview
nergy conservation through management has been, and re-
mains, one of the most viable energy resources available to all
sectors of the energy consuming building community. By mini-
mizing energy consumption and still maintaining the posture required
for our business activities, we can save money and therefore survive our
respective market areas.
An EMS is one energy conservation alternative that can provide a
means to control, reduce and perhaps eliminate energy waste.
HISTORY
There are a multitude of EMSs on the market today ranging from
residential EMS to large facility management systems. Several types of
EMS are available. Most major control firms and other companies in this
field have introduced families of building automation systems intended
for a wide range of building sizes. These systems can be classified as
follows.
Class I Systems
These consist of small monitoring and control systems that can be
used in buildings with floor areas up to about 100,000 ft
2
. The basic
component is a microprocessor preprogrammed to start/stop different
E
©2002 by The Fairmont Press

HVAC system components according to a preselected schedule. The
systems can be designed to perform other operations such as monitoring
fire alarms and smoke detectors, security checks, and load cycling.
Class II Systems
These systems are similar to those in Class I except that they can
serve larger buildings and some building complexes. The available soft-
ware packages provide functions such as: executive and operating in-
structions, scheduled start/stop operations, load rotation and shedding,
control points resetting, optimization of start time, enthalpy optimiza-
tion, and fire alarm and life-safety system monitoring.
These systems can usually monitor about 2000 addressable points.
When these systems are used for a group of buildings or building com-
plexes, the central control facility is connected to remote data gathering
panels by means of one or more types of data communication links.
Because more than one data gathering panel is served by a central facil-
ity, each panel is allotted an equal amount of time in direct communica-
tion with the central facility.
Class III Systems
These are referred to as “direct digital control” (DDC) systems, and
are the most sophisticated type of EMS. DDC systems are used for build-
ing complexes such as medical institutes and university campuses. In
addition to the basic functions described earlier, it is possible to include
the following programs: reset of supply air system; optimization of cool-
ing and heating plants operation; building management; lighting con-
trol; preventative maintenance; energy auditing; and efficient bookkeep-
ing.
When did “centralized management of energy” begin? (See
As can be seen in the table, centralized monitoring and control of
equipment and conditions for HVAC systems has been around since the
1950’s in various forms.
In addition to reducing energy costs, the centralized monitoring
and control of mechanical equipment gives an organization additional
benefits of improved labor efficiency, reduced maintenance costs, and
extended equipment life. With alarm reporting capability, mechanical
equipment problems can be noted and corrected more expeditiously.
©2002 by The Fairmont Press

Table 2-1. EMS History—Five Generations
1st Generation (1950’s)
Remote monitoring panel using temperature sensors and switches
to manually read conditions and start or stop motors.
2nd Generation (1960’s)
Use of electronics, introduced low voltage circuits to automate or
speed up monitoring of panel functions.
3rd Generation (1960’s-1973)
Multiplexed systems consisted of groups of sensing and control
points tied into a local system panel and a pair of wires that run back to
a central console from multiple panels. Scanning the points in a system
was accomplished electronically (response time was slow and failure of
the Central Processor meant total system down).
4th Generation (1983)
Individual building panels become electronically smarter with their
own stand-alone minicomputer. They can carry out most functions that
the central computer used to do, and also relay information back to a
central console. The processing of system functions is throughout the
system.
The speed of the electronics, as well as software, and hardware re-
liability soon “over powered” conventional pneumatic control systems
with simple proportional control and offset. EMS sensor locations were
duplicated with pneumatic and electronic sensors.
5th Generation (1987)
Direct Digital Control (DDC) uses a small microprocessor and soft-
ware for system sensing and control. DDC units can stand alone to pro-
vide various digital control sequences, or several DDC units can be tied
to a central operator station. On any size system, this could be an IBM-
PC or compatible. Most EMS manufacturers have their own software
packages which results in the EMS becoming proprietary, as does the
DDC system.
©2002 by The Fairmont Press

FUNCTIONAL CAPABILITIES
In his zeal to conserve precious fuels and keep down growing fuel
bills, the engineer often specifies the latest and most advanced EMS.
What he gets is likely to be a much more complex system than is really
necessary, one capable of performing an unneeded variety of sophisti-
cated operations.
How can this be avoided, and what steps must be taken to prop-
erly specify a system to assure that he gets exactly what is needed—no
less and no more?
Following is a brief list of events that should serve as a guide to the
overall EMS project (covered in greater detail in
1.
Initial Concept
2.
Information Retrieval
3.
Candidate Buildings and System Selection
4.
Field Survey
5.
Design
6.
Contract Documents Preparation
7.
Contract
8.
Installation and Training
9.
Acceptance
10.
Operation and Maintenance
FUNCTIONS
The specific functions implemented in any EMS design are estab-
lished by a thorough study of the building(s) and system(s) to be con-
trolled. The most common EMS software functions are listed below:
•
Programmed Start/Stop: Occupancy schedules
-
Fans: save HP and heating/cooling
-
Pumps: can be interlocked with fans
-
OA Dampers: “less than” occupancy schedules
-
Air Compressors: blow down moisture
•
Optimized Start/Stop: Based on indoor/outdoor temperatures to
achieve a comfort level. Can be stopped early.
©2002 by The Fairmont Press

•
Temperature Setback/Setup: Change temperature set points of
thermostats when building is unoccupied.
•
Economizer Control: Use “free cooling” from outdoors when tem-
perature is suitable (and) place dampers at minimum position
when cooling.
•
Enthalpy Control: Sophisticated economizer control using tem-
perature and humidity (indoors and outdoors).
•
Discharge Air Reset: Reduce excessive heating and cooling in
HVAC systems.
•
Hot Water Reset: Reset hot water from outdoor air temperature.
•
Chilled Water Reset: Reset supply from return water temperature.
•
Chiller Optimization: Balance chiller operation to load demand.
•
Boiler Optimization: Balance boiler operation to loads and control
combustion air.
•
Demand Control: Reduce peak electrical loads (kW savings).
•
Duty Cycling: Turn off equipment a percentage of the time accord-
ing to an established schedule to reduce energy use (code compli-
ance?).
•
Monitoring/alarm: Logging conditions, on-off/high-low alarms,
trend logs over time, equipment run time, energy use, etc.
•
Fire Notification: Parallel with building alarm system (or) fire
alarm must be UL approved for this application.
•
Security: Alarm notification/door switches/voice synthesizers/
pagers.
•
Card Access: Card readers, exit doors, supervised door contacts,
separate programming modules.
©2002 by The Fairmont Press

H
ARDWARE
—S
YSTEM
C
OMPONENTS
15
Chapter 3
Hardware—
System Components
here are five basic components that are used in energy man-
agement systems. Starting from the equipment being con-
trolled and working back to the operator’s console the compo-
nents are sensors, actuators, microprocessor-based field panels (control-
lers), communication links, and a central operator station.
Sensors and/or actuators are located at the equipment being con-
trolled. Sensors transmit information that defines a single operating
condition, such as temperature or pressure. This information is supplied
to the field panels (controllers) for monitoring or decision-making pur-
poses. Actuators are the mechanical interfaces that implement actions
initiated by the controllers. The actions can be self-initiated by the con-
trollers. The actions can be self-initiated or initiated as a consequence of
information received from the sensors. Field panels centralize the input
from the sensors and distribute the output from the controllers to the
actuators. The information is then transmitted over the communication
links to a central operator station. These links carry information between
all system components.
SENSORS
Sensors are electric devices that assess changes in ambient condi-
tions and react by varying electrical voltage, or current. This voltage or
current variation is transmitted either as a digital or analog signal to
T
©2002 by The Fairmont Press
field panels, for subsequent monitoring or analysis by the controller. A
digital signal may have one of two predetermined values used to moni-
tor two-position conditions, such as on/off or high/low. The analog
signal has a range of values that vary proportionally to the condition
being measured and is used for items such as temperature, pressure,
flow, and relative humidity. Examples of analog sensors are thermo-
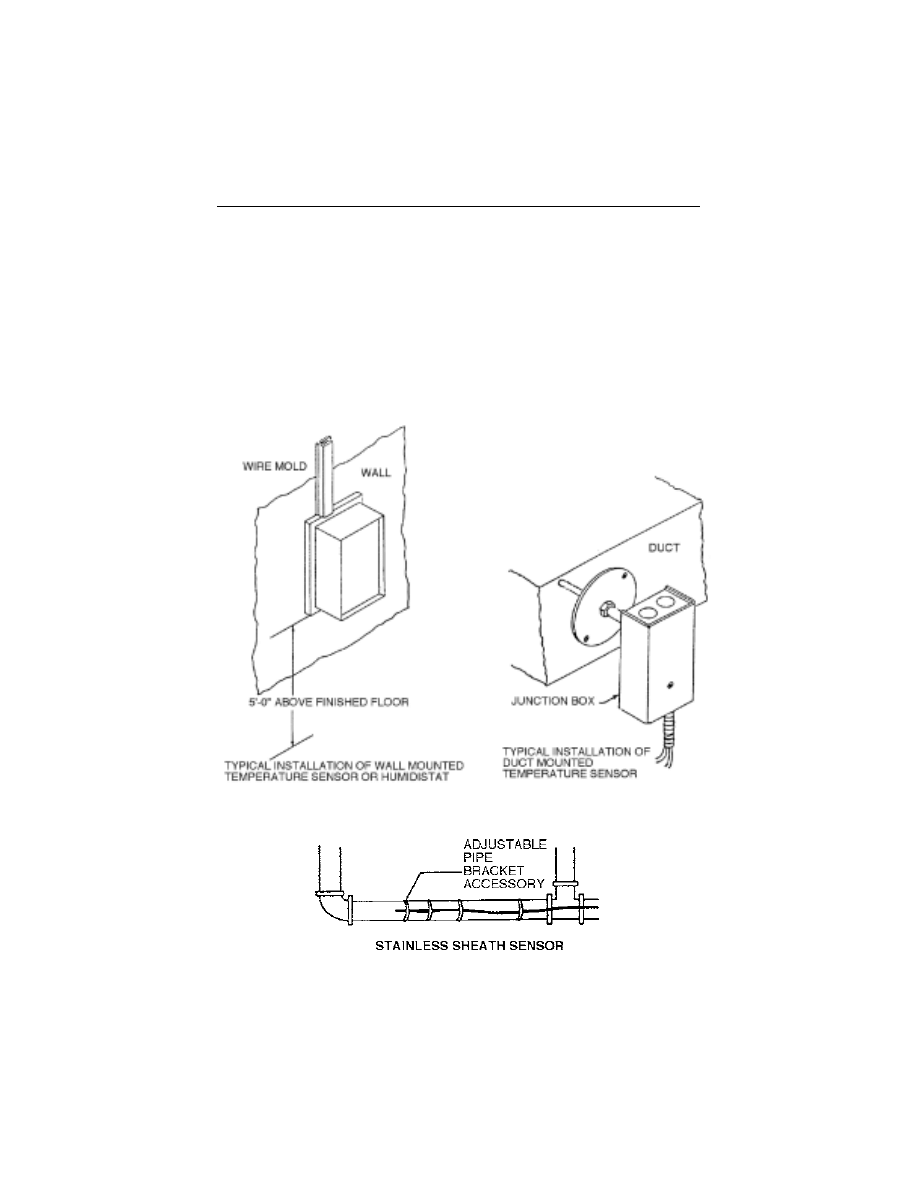
couples, resistance temperature detectors, and thermistors. Refer to Fig-
ure 3-1 for sensor mountings.
Figure 3-1. Sensor Mountings
©2002 by The Fairmont Press
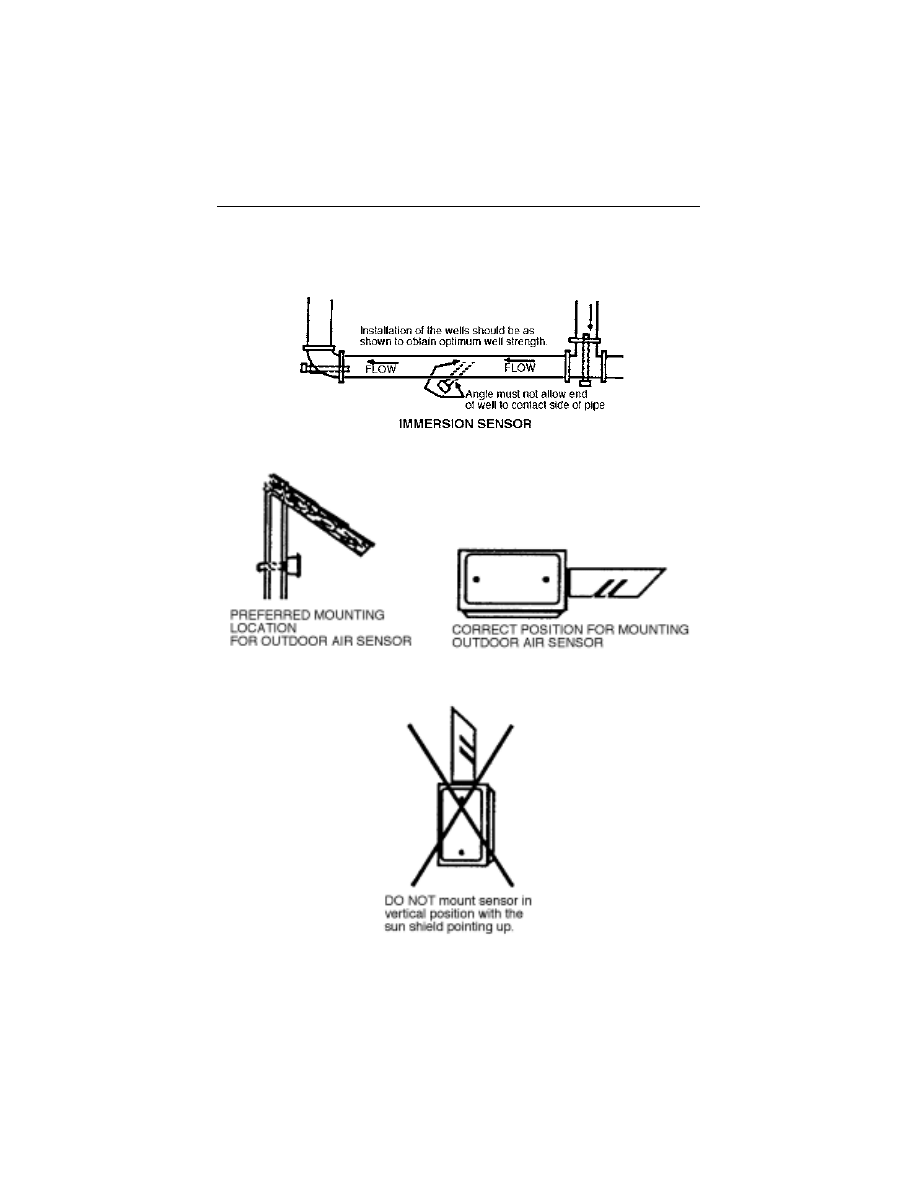
Figure 3-1. Sensor Mountings (Continued)
©2002 by The Fairmont Press

Resistance Temperature Detector (RTD)
The electrical resistance of certain metals varies proportionally
with temperature in a precise, consistent, and repeatable manner. RTDs
made of these metals provide a measurable resistance that is propor-
tional to temperature.
Thin Film Platinum is considered the optimum sensor because of
its’ superior characteristics such as operating temperature range, inter-
changeability, linearity, stability, and reproducibility available through
automated manufacturing conditions. These RTDs can be furnished as 2
or 3 wire, 4-20 MA units with an accuracy of
±
0.1% of span and a 1000
ohm @ 0
°
C reference resistance. The sensing element has a temperature
coefficient of 0.00 375 ohm/ohm/
°
C.
There are other wire wound RTDs available such as Nickel (me-
dium accuracy), Balco (low accuracy), and Nickel-Iron (70%-30%/me-
dium accuracy).
All mounting configurations are available for room, duct, immer-
sion, strap-on, and outside air temperature sensing.
Thermistor
Thermistors are a semiconductor made from combinations of
nickel, manganese, copper and other metals. They offer a fast response,
are good for small spans, and are a relative low cost sensor.
Disadvantages include very non-linear, poor interchangeability,
and not suitable for wide spans. Their accuracy is
±
0.4
°
F of span.
Thermocouple
Two wires of two dissimilar metals joined to form a junction are
seldom, if ever, used with modern EMSs. They can operate over a wide
temperature range however their interchangeability and repeatability
are poor. They also have a low output sensitivity.
Relative Humidity
The principle of operation of a capacitive relative humidity sensor
is a small capacitor consisting of a hygroscopic dielectric material placed
between a pair of electrodes. Most capacitive sensors use a plastic or one
micron thin polymer as the dielectric material, with a typical dielectric
constant ranging from 2 to 15. When no moisture is present in the sen-
sor, both this constant and the sensor geometry determine the value of
the capacitance.
©2002 by The Fairmont Press

By definition, relative humidity is a function of both the ambient
temperature and water vapor pressure. Therefore, there is a relationship
between relative humidity, the amount of moisture present in the sensor,
and sensor capacitance. This relationship is at the base of the operation
of a capacitive humidity instrument.
Note: All humidity sensors should be factory calibrated following
procedures described in ASTM standard E104-85, Standard Practice for
Maintaining Constant Relative Humidity by Means of Aqueous Solu-
tions.
Pressure
The most common use is a pressure-electric (PE) switch where a
fluid pressure activates electrical contacts in the device. Differential PE
switches can be used to sense the flow of a fluid in ducts and in pipes.
There are also pressure to electric transducers which will produce a
proportional output electrical signal change relating to a varying input
pressure.
Devices are also used to measure static pressure in systems to con-
trol fluid flow. Pressure should never exceed the calibrated range of the
instrument.
Flow
These devices measure flowrate, converting kinetic energy to a
pressure differential. Measured differential pressure typically varies
from a few inches of water to 10 or 20 psi. See
sors.
Accuracy or uncertainty is considered to be comprised of two com-
ponents, that due to the systematize error and that due to the precision
or random error. For direct calibration of the overall meter system which
includes the differential pressure transmitter system, the upstream and
downstream piping and suitable flow straightener, best accuracy is esti-
mated to fall within the approximate range 0.2 to 0.5 percent.
A vortex shedding meter, on the industrial scene since 1970, oper-
ates on the principles that the frequency of vortex shedding for fluid
flow around a submersed object is proportional to the fluid stream ve-
locity. Flowrate is measured by detecting this frequency. A big advan-
tage for a building EMS application is that accurate measurement of the
probe output is a much simpler measurement task than accurate mea-
surement of a differential pressure type meter.
©2002 by The Fairmont Press
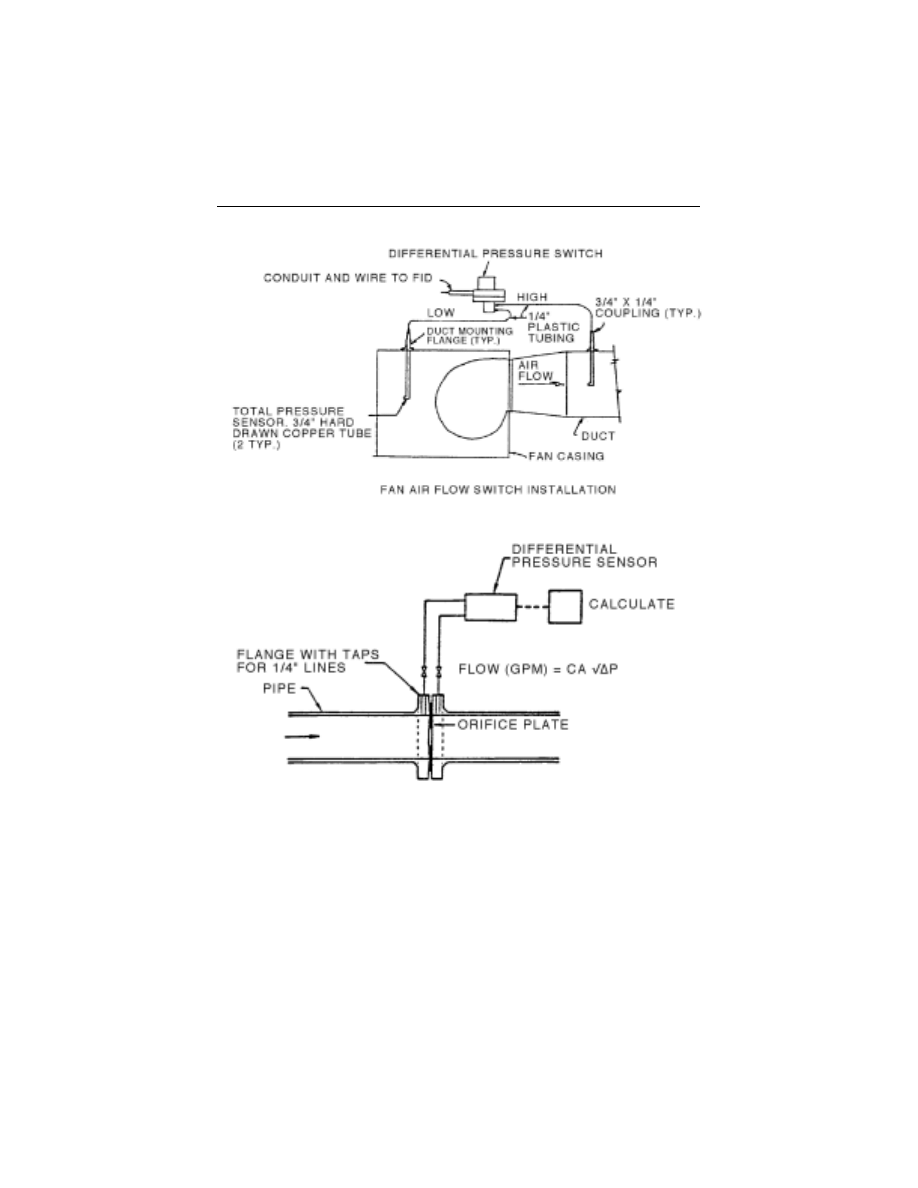
Figure 3-2. Flow Sensors
A turbine meter contains a bladed rotor or turbine which rotates at
a velocity proportional to volume rate of flow. Most models employ
magnetic pick-offs in which the rotor blades vary the reluctance of a
magnetic circuit which generates an AC voltage in the pick-off coil. The
frequency is directly proportional to rotor speed. This frequency is
sensed as an indication of flow. It can be counted by an electronic
©2002 by The Fairmont Press
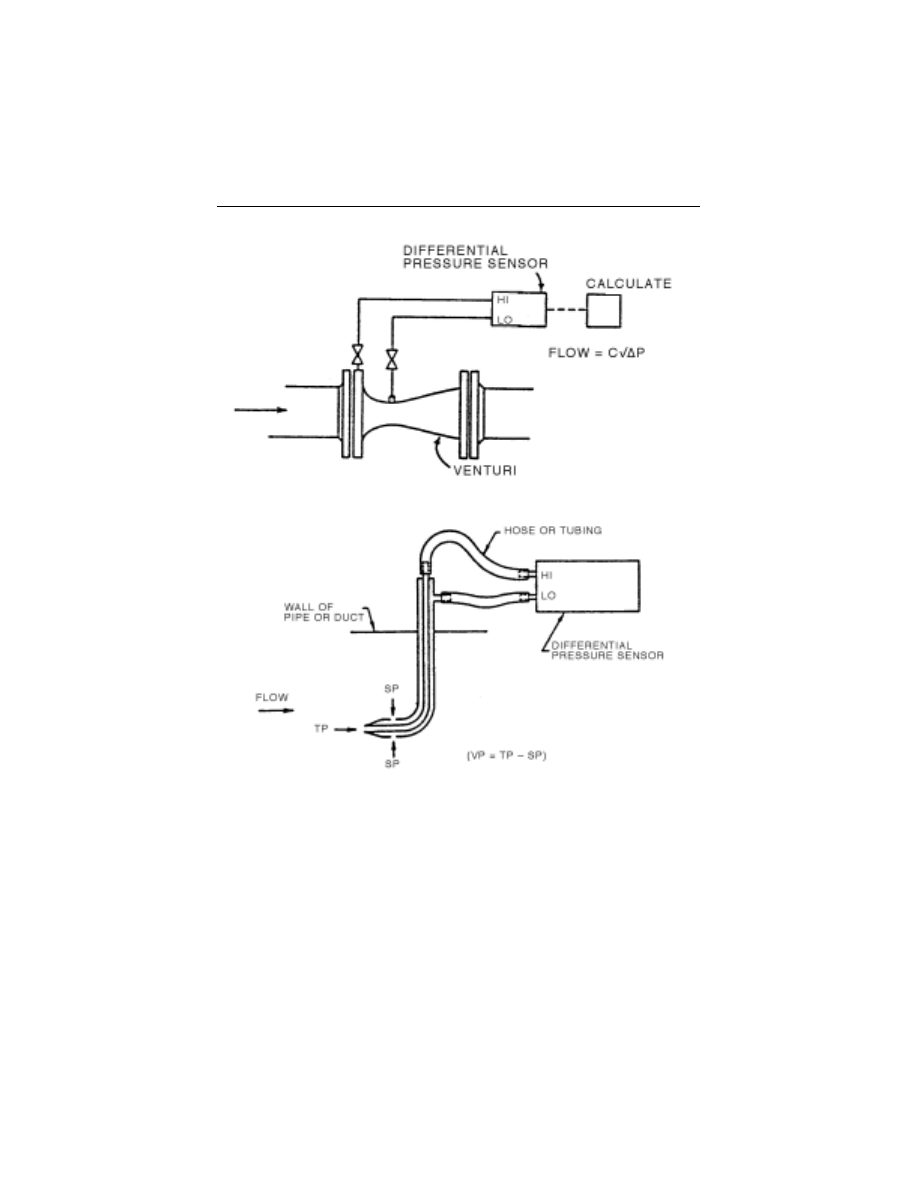
Figure 3-2. Flow Sensors (Continued)
counter, or converted to an analog signal using voltage to frequency
converter circuits. The calibration factor or meter factor is expressed in
electrical pulses generated per unit volume of throughput, e.g. pulses/
gallon. The turbine meter has advantages of small size, repeatability, and
a type of output which is digital in nature. These make the meter quite
suitable for EMS applications.
©2002 by The Fairmont Press

kW Meters
kW Meters or watt hour meters are used to measure kW and kWh.
Input voltage must match the meter rating. Meters can be solid state
with non-resettable electromechanical display for local indication of
kWh and a contact closure for remote signaling to an EMS. Watt hour
transducers are also available which measure true watt-hours and pro-
vide a pulse output to drive counters or can signal an EMS.
ACTUATORS
The actuator transforms electric- or pneumatic-coded instructions
into mechanical responses. Actuators, which may be pneumatic, electric,
electronic, or solid state, position controlled devices such as dampers or
heating and cooling valves in response to signals received from the
device controlling the actuator. Actuators may be either proportioning
or modulating, with two position or snap action control.
Depending on the required control sequence of operation, if either
controlling air pressure or electric power is lost, actuators can fail in the
normally open or normally closed position. Pneumatic actuators re-
spond to controlling air pressure changes over a range of 3 to 15 psi
(pounds per square inch); electric actuators respond to on/off electric
signals from the controlling device. Proportioning electric actuators re-
spond to changes in resistance from the controlling devices, generally
over a 135 ohm range, or to changes over a 3 to 15 volt dc range for solid
state actuators.
1.
Electric Relays or contractors are designed for switching electrical
loads such as air conditioning, compressors, and resistance heating
appliances. Coils and contacts must be rated for the load they are
controlling.
2.
Damper Operator/Actuators open and close dampers according to
an electric, electronic, or pneumatic signal from a controller. Most
operators are spring return to normal position. Operators can be
installed externally or internally (inside a duct).
3.
Valve Operator/Actuators are the part of an automatic valve that
moves the stem up and down based on an electric, electronic, or
©2002 by The Fairmont Press

pneumatic signal from a controller. For butterfly or other rotary
valves, the operator rotates the stem. The operator and valve can
be two separate devices or together they can be one device.
4.
Transducers are electro-mechanical devices that can provide elec-
tric or pneumatic outputs which can be changed by the application
of a varying electrical signal to its input.
During the 1970’s, such devices were sometimes referred to
as an electro-pneumatic motor driven servo. 6 or 24 volt DC power
was used as the applied power. Positive voltage applied to the
integral motor rotated it in a clockwise direction causing an in-
crease in output pressure (negative voltage = counterclockwise =
decrease in output pressure). The magnitude of the pneumatic
output change is directly proportional to the duration of the elec-
tric input signal. The output is used to reset or reposition pneu-
matic controlling receivers or controlled devices.
Modern day transducers are sometimes 100% solid state us-
ing a piezoresistive silicon pressure sensor and an
electropneumatic converter to provide the desired pneumatic out-
put pressure. These units can be mounted in any orientation and
do not require filtered air. They provide reliable, repeatable, and an
accurate means of converting any analog signal into pneumatic
pressure.
Transducers are also manufactured to provide a 4 to 20 mA or
0 to 20 mA output proportional to the duration of the pulse input
(pulse wave modulation—PWM). Outputs may also be in the form
of user selectable 0 to 10 V dc or 0 to 20 V dc depending on the end
device requirements.
for actuator devices.
FIELD PANELS
Field panels provide an interface between remote sensors and ac-
tuators. Today these are considered to be direct digital controller (DDC)
panels. Previously they were simply data gathering panels which re-
layed information to a central minicomputer.
DDCs serve as a point of consolidation for many sensor and con-
trol points. Each sensor or actuator represents one control point.
©2002 by The Fairmont Press
Uncoded signals from sensors are received, coded, and sent to the DDC
microprocessor. Conversely, coded information is received from the
DDC, decoded, and sent back to the actuators. The number of control
points that can be accommodated by a DDC panel varies from 4 to 200.
“Intelligent” or “smart” DDCs have their own microprocessor to process
information and respond with instructions.
Many field panels are manufactured with a built-in keyboard and
visual display. This is an item that should be specified for (at least) the
primary or master panels located throughout a facility. If the panel is not
equipped with this feature, maintenance workers will have to rely on a
portable operator interface device which are cumbersome and easily
“left behind.”
for additional information on digital controllers.
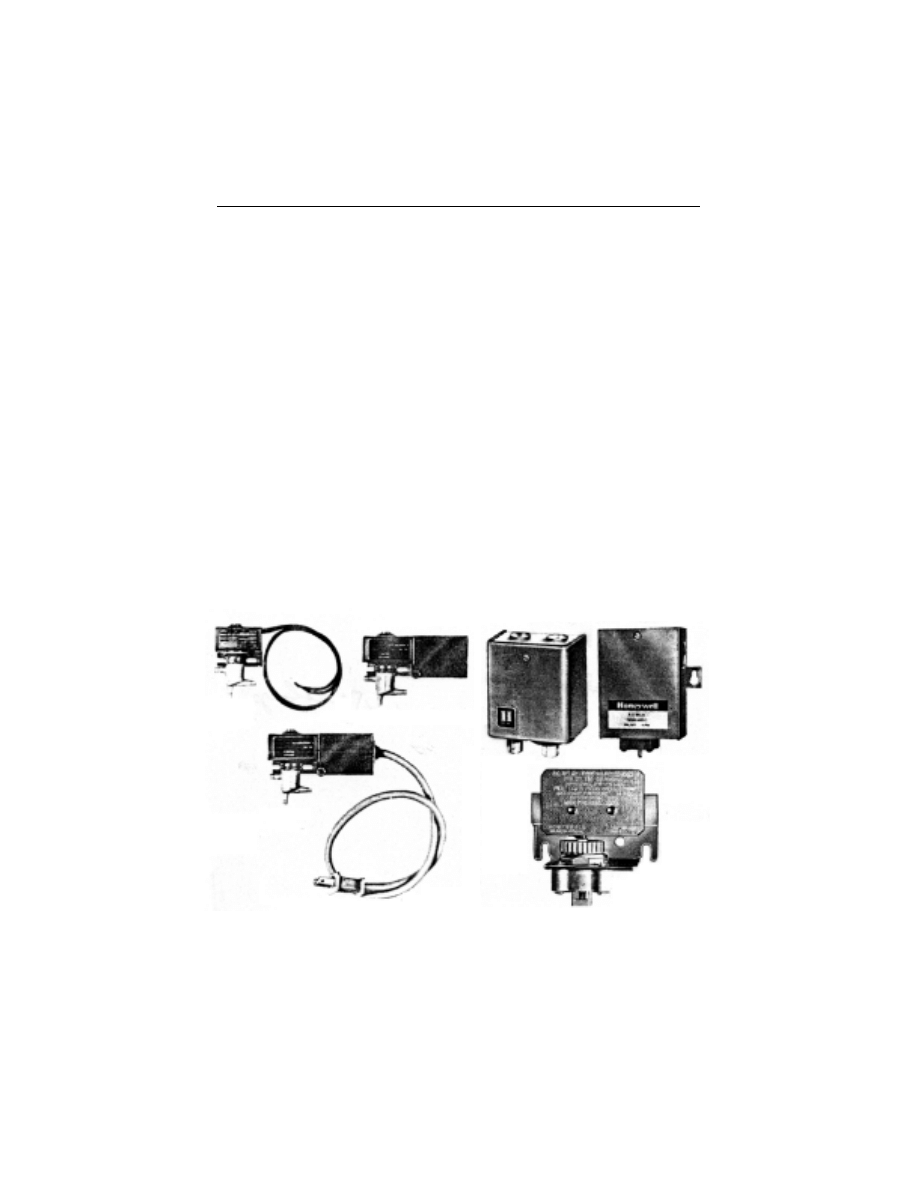
Figure 3-3. Actuator Devices
Pressure-electric relays
Pressure-electric switches
©2002 by The Fairmont Press

Figure 3-3. Actuator Devices (Continued)
Valve actuators
Damper actuators
Electro-pneumatic
Motor Driven Servo
©2002 by The Fairmont Press
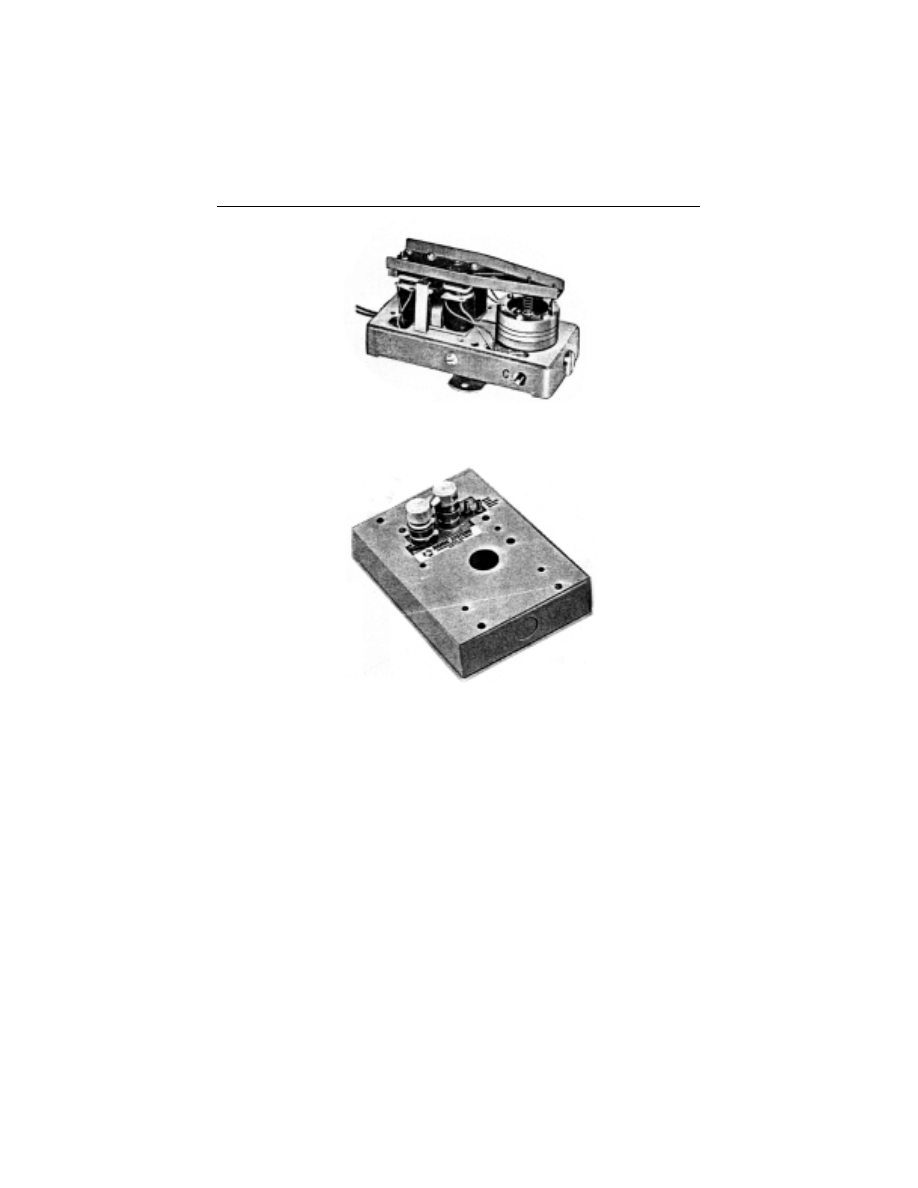
Figure 3-3. Actuator Devices (Continued)
Electro-pneumatic Transducer
Solid-state Piezoresistive Silicon
Electropneumatic Converter
©2002 by The Fairmont Press

S
YSTEM
A
RCHITECTURE
27
Chapter 4
System Architecture
FRONT END BASED
MSs are described in this section more as a comparison as how
a system of the early 1980’s was designed and how it functions.
In general, these systems have field panels installed at remote lo-
cations that are wired to a central computer. Field panels accept inputs
from the remote sensors and deliver output signals to devices, however,
all decisions and operating parameters reside at the central computer.
For the most part, the field panels are “dumb” connection points. If the
central computer is off line or if the connecting transmission wire is
disconnected all control is lost and the entire system stops functioning.
DISTRIBUTED INTELLIGENCE EMS
This type of system has a central computer and can control a large
number of input-output points ranging from 50 to more than 2000 per
system. Field interface is provided by field panels that have limited
intelligence.
These systems are capable of performing all EMS functions, al-
though, not all systems use all functions. The central computer uses
varying amounts of software storage, and tape or disc storage can be
added to increase data-handling capacity. Operator access through a
fixed terminal keyboard is routine. An alarm/logging printer is often
provided.
E
©2002 by The Fairmont Press

Field panels are equipped with read-only memory (ROM) in their
software, which allows the panel to operate in a stand-alone limited
mode in the event of a central computer failure. Battery backup is pro-
vided for the random access memory (RAM) content of the panel soft-
ware and the real time clock.
For single building control, dedicated twisted pairs of wires are
generally used for data transmission media. Where groups of buildings
are controlled, dedicated telephone lines and 1200 baud MODEMs are
normally used between buildings; with twisted pairs used within build-
ings.
FULLY DISTRIBUTED EMS
The major components in a fully distributed system are stand-
alone, multi-function microprocessors that have ability to perform any
combination of software functions described in
All necessary
application software is located within the microprocessor close to the
equipment being controlled. The microprocessors are powered with
120V and hardwired to all sensors and actuators with standard 24V
wiring. The microprocessors are looped together using any of the data
transmission methods described in
through either RS-232C or
RS-422 communication ports. In most cases, a single communication link
ties the microprocessor loop to a central operator station. This is com-
plete stand-alone operation.
There are several advantages associated with distributed systems.
With the stand-alone feature, the initial investment can be limited, while
expansion is virtually unlimited. Remote microprocessors provide local
digital and analog input/output ports, allowing direct communication
between the microprocessors and the sensors and actuators. Information
is transmitted in digital form. Direct digital control (DDC) pulse width
modulation lends itself to proportional-integral-derivative (PID) control.
The central operator station that is often found with these systems
is a convenient personal computer. It is used to download applications
software to remote microprocessors, edit that software, troubleshoot the
system, and monitor or report on conditions (See
through
©2002 by The Fairmont Press
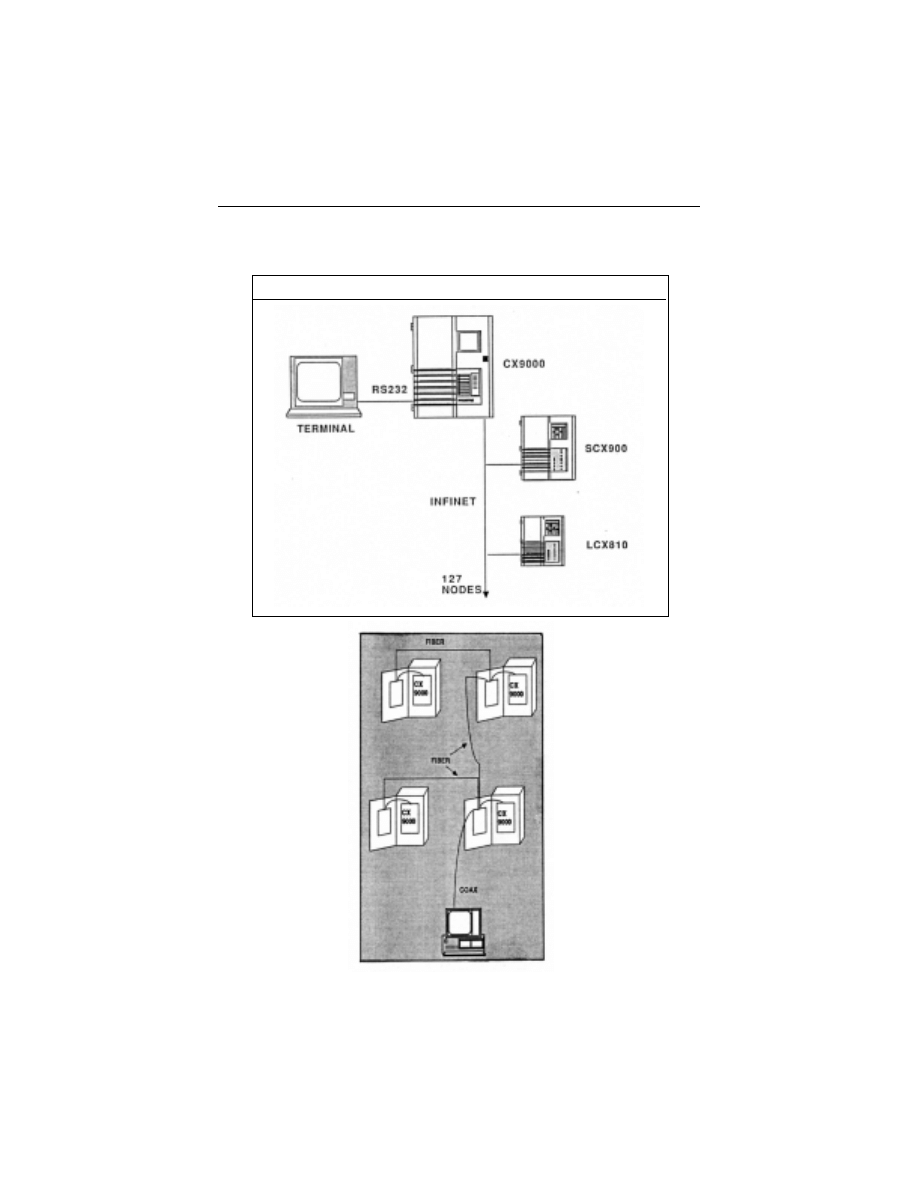
Figure 4-1. Andover Architecture
Andover Controls Corporation
BASIC ARCHITECTURE
©2002 by The Fairmont Press
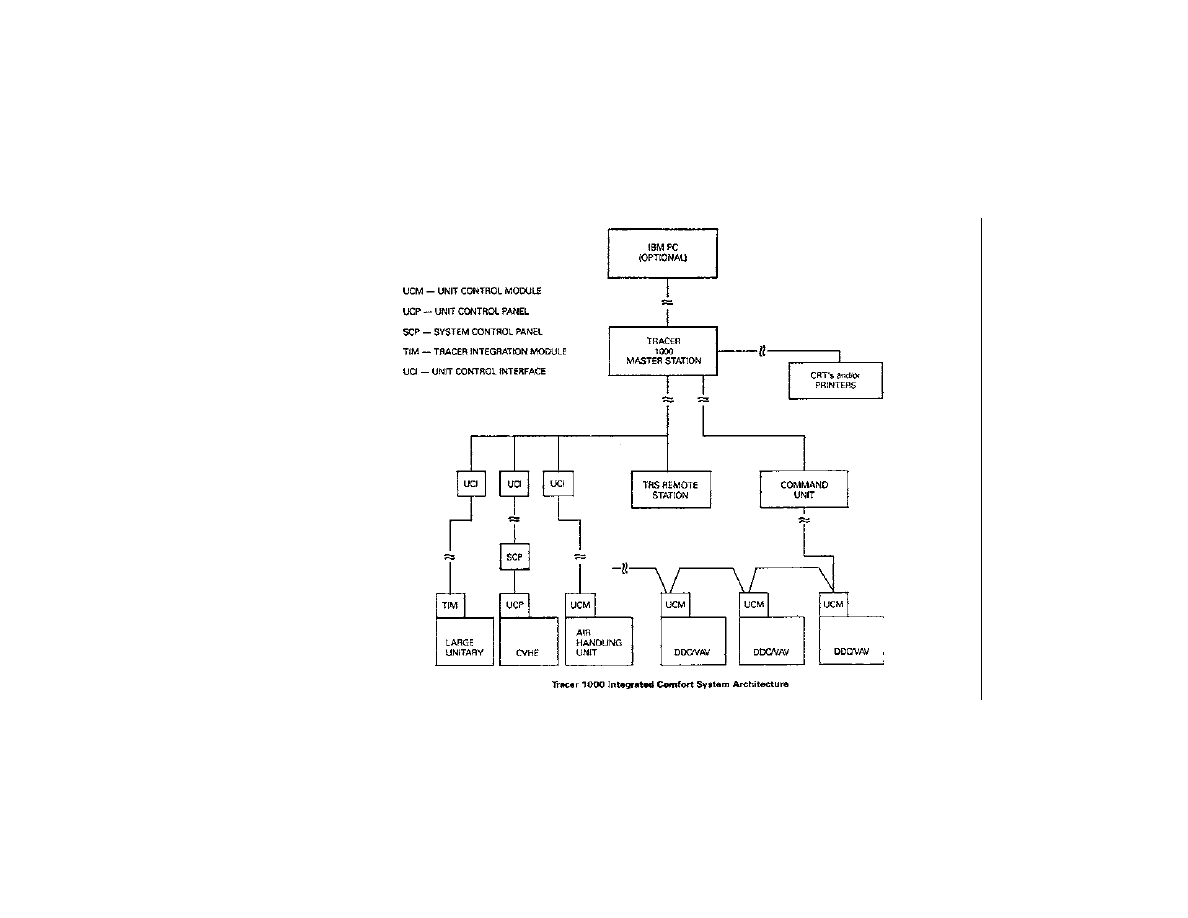
Figure 4-2.
Trane Architecture
©2002 by The Fairmont Press
Figure 4-3.
Barber Colman Architecture
©2002 by The Fairmont Press
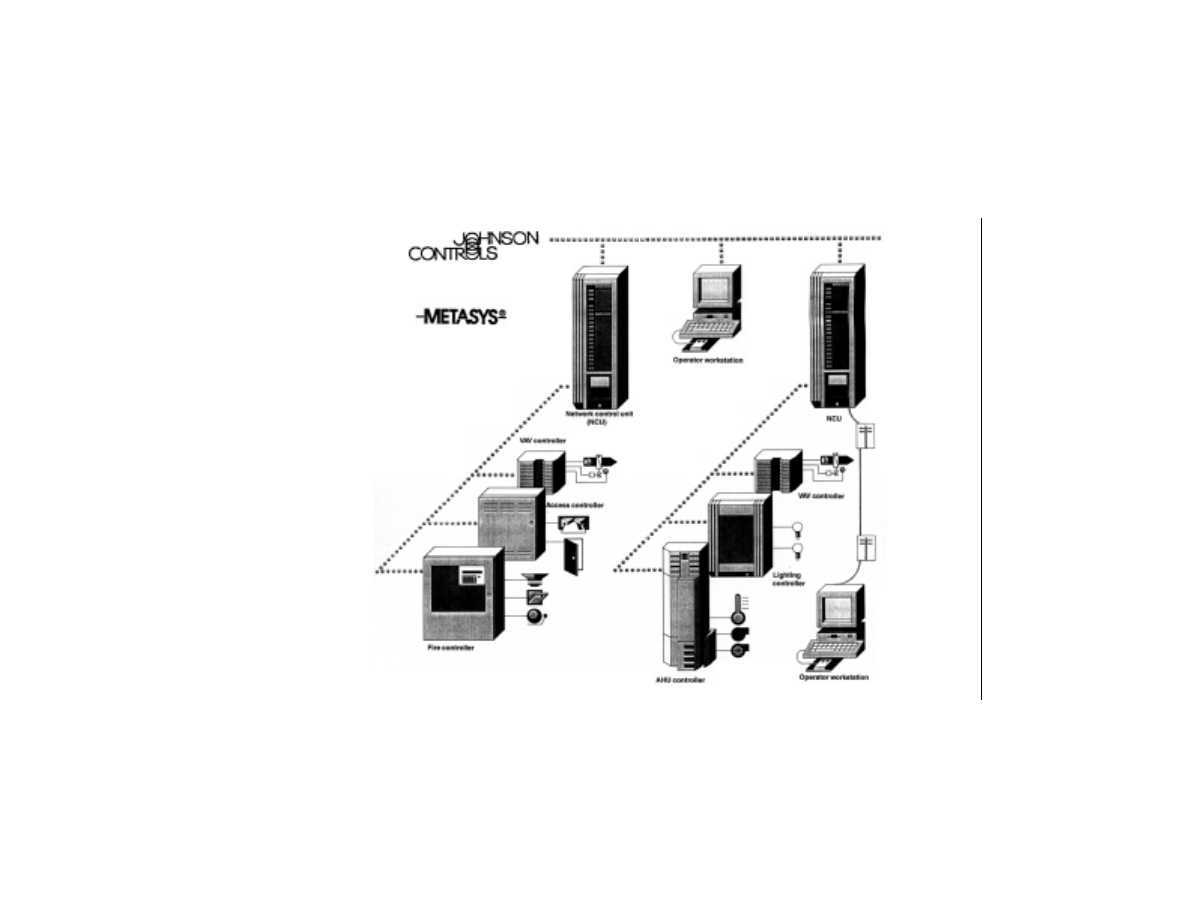
Figure 4-4. Johnson
Controls Architecture
©2002 by The Fairmont Press
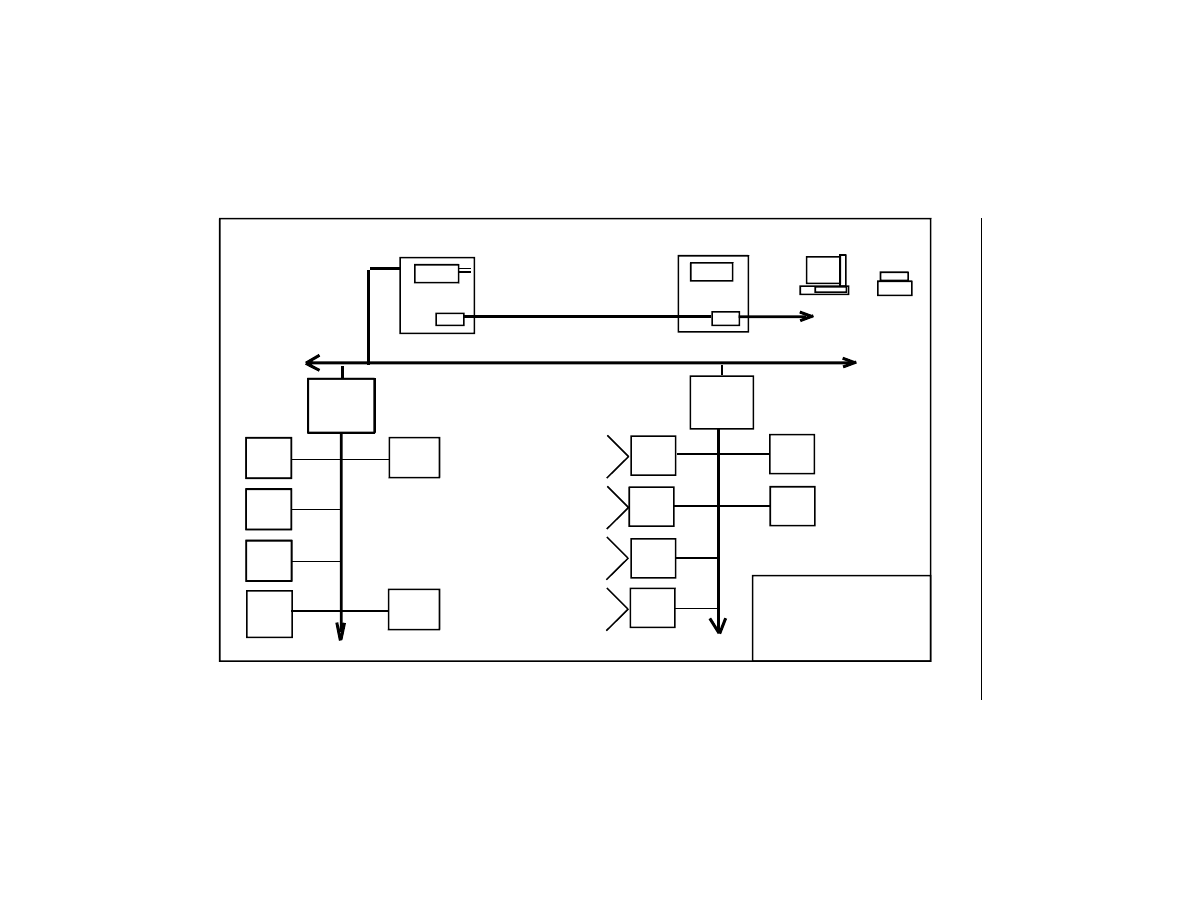
Figure 4-5. Robertshaw Architecture
OPERATOR
WORKSTATION
DMS 350
CC
HIGHWAY
DATA
RS 232 PORTS (2)
FANS
BOILERS
FILTER STATUS
SMOKE DETECTOR
TEMPERATURE
HUMIDITY
PRESSURE
DAMPER
PNEU. SENSOR
VALVE
MAIN LIGHTING
PARKING LIGHTS
4 CO
4 CI
6 AI
5 PO
5 PI
TO OTHER SLAVES
LIGHTING
MODULE
4 CO
4 CI
RS
485
SLAVE
TRUNK
DCM
6 A
I
5 PO
5 PI
TO OTHER
DISTRIBUTED
CONTROL
MODULES
(32 MAX)
DCM
6 AI
4 CO
4 CI
6 AI
5 PO
5 PI
L I G H T -
ING
MODULE
4 CO
4 CI
5 PO
5 PI
RS
485
SLAVE
TRUNK
TO OTHER SLAVES (UP TO 4000 FT. MAX.)
DCM— Distributed
Control
Module
CC—
Communication
Controller
DMS 350 SYSTEM ARCHITECTURE
IBM PC
TO OTHER
DMS 350’s (32 MAX)
PRINTER
TO OTHER
DISTRIBUTED
CONTROL
MODULES
(32 MAX)
©2002 by The Fairmont Press

D
IRECT
D
IGITAL
C
ONTROL
35
Chapter 5
Direct Digital Control
INTRODUCTION
DC, which uses a digital computer with no moving parts, re-
places both the conventional pneumatic control panel and the
added energy management system. No control devices need to
be adjusted or checked, because the microprocessor panel has no calibra-
tion or routine maintenance requirements. Operating instructions built
into the software provide for simplicity and confidence of control. Cool-
ing setpoints and strategies can be set in the winter and not tested, with
complete assurance that the DDC system will perform as expected when
summer arrives.
Multiple digital control microprocessors, each operating its own
piece of HVAC or other equipment, can be linked to a single desktop
console at a central location. Through this one desktop unit, an operator
has access to all important setpoints and operating strategies. Monitor-
ing, troubleshooting, and energy management functions are all per-
formed from the same central console.
Applying a direct digital control computer to HVAC equipment
requires only two considerations. The computer must be physically con-
nected to the equipment and the computer must be given instructions
via software on how to operate the equipment.
A DDC computer must be connected to both sensors (such as tem-
perature sensors) and controlled devices (such as valve operators). Sen-
sors are connected to the computer using two kinds of inputs, analog
and binary. An analog input is a variable input that could be a tempera-
ture, pressure, or relative humidity reading. A binary input is a two-
D
©2002 by The Fairmont Press

mode input that is either on or off at any given time, such as a motor
status, filter status, or contacts with an electrical demand meter.
Controlled devices are connected to the computer using digital and
analog outputs. A binary output is a two-mode output, either on or off
at a given time. The time duration of either mode can be computer
controlled to vary between a fractional part of a second to a full on or
full off. A binary output could control a fan or pump motor or a lighting
circuit. Using pulse-width modulation, it could also control a valve or
damper actuator. Pulse-width modulation used bi-directional (open/
close) pulses of varying time duration to position controlled devices
exactly as required to satisfy demand. Wide pulses are used for major
corrections, such as changes in setpoint or start-up conditions. Pulse
width becomes progressively shorter as less correction is required to
obtain the desired control setpoint.
Analog output is a variable output that might range, for example,
between zero and ten volts. This is not usually needed with direct digital
control because pulse-width modulation, using binary outputs, is a sim-
pler and more accurate technique directly compatible with the binary
form the computer uses internally to store information.
Control of valves and dampers is very accurate with DDC because
of proportional-integral-derivative (PID) control, perfected years ago in
the process control field. PID control techniques provide fast, responsive
operation of a heating valve, for example, by reacting to temperature
changes in three ways: the difference between setpoint and actual tem-
perature (proportional), the length of time the difference has existed (in-
tegral), and the rate of temperature change (derivative) (See
).
PID saves energy and increases accuracy at the same time by eliminating
hunting and offset by decreasing overshooting of a given temperature
and minimizing the amount of time required to settle at the desired tem-
perature.
Once connections to the equipment (analog and binary inputs and
outputs) have been made, the DDC microprocessor must be given in-
structions to operate the controlled devices. These instructions are in the
form of software programs (application packages) with various control
options and setpoints, all of which reside in the microprocessor’s
memory.
Software, though, is what primarily determines the ultimate capa-
bility of a DDC system. The changeable portions of a computer’s
memory provide a user flexibility of control far greater than that avail-
©2002 by The Fairmont Press
5-1. P.I.D. Control
INTRODUCTION
TO PID
Proportional-
Integral-Derivative
Control
One of the most
common terms
heard in connection
with today’s Direct
Digital Control sys-
tems is “PID”; an
acronym for Propor-
tional-Integral-De-
rivative control. An
intimidating sound-
ing term, PID simply
refers to the 3 types
of control action that
are used in the con-
trol of modulating
equipment such as:
valves, dampers,
variable speed devices etc. Surprisingly the concepts behind the 3 control ac-
tions are quite straight forward and easily grasped. Gaining an understanding of
PID and its usage in control systems will provide a valuable insight into the
operation of modulating control loops.
Proportional Control
- the P of PID—is a technique where a control signal
is produced based on the difference between an actual and a desired condition
(i.e. a setpoint and an actual temperature). This difference is known as the
“error.” The control device creates an output signal that is directly related to the
magnitude of the error, hence the name Proportional control.
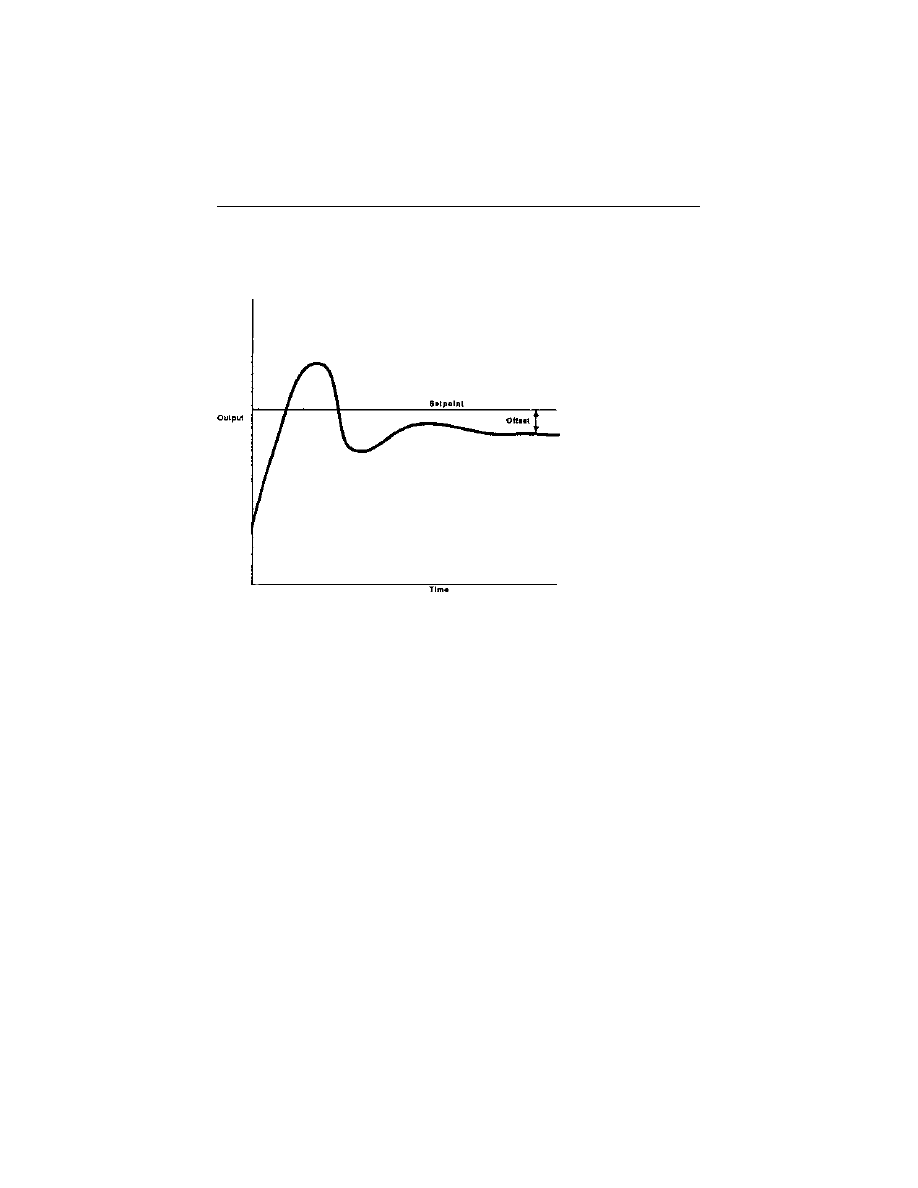
Basic Proportional control is typical of that found in conventional closed
loop temperature control systems. The weakness of Proportional Control is that
it requires the existence of a significant error condition to create an output signal.
Because of this, proportional-only control can never actually achieve the desired
condition. Some small amount of error will always be present. This error is re-
ferred to as the OFFSET of the system.
Integral action is directed specifically at the elimination of Offset. Because
the magnitude of an offset is relatively small, it cannot generate a significant
change in the control signal by itself. An integrating term is used to look at how
long the error condition has existed, in effect summing the error over time. The
value produced by this summation becomes the basis for an additional control
(Continued)
PROPORTIONAL CONTROL
Figure 5-1a
©2002 by The Fairmont Press
signal, which is added to the signal produced by the proportional term. The result
is that the control loop continues to produce a control action over time, allowing
it to eliminate Offset.
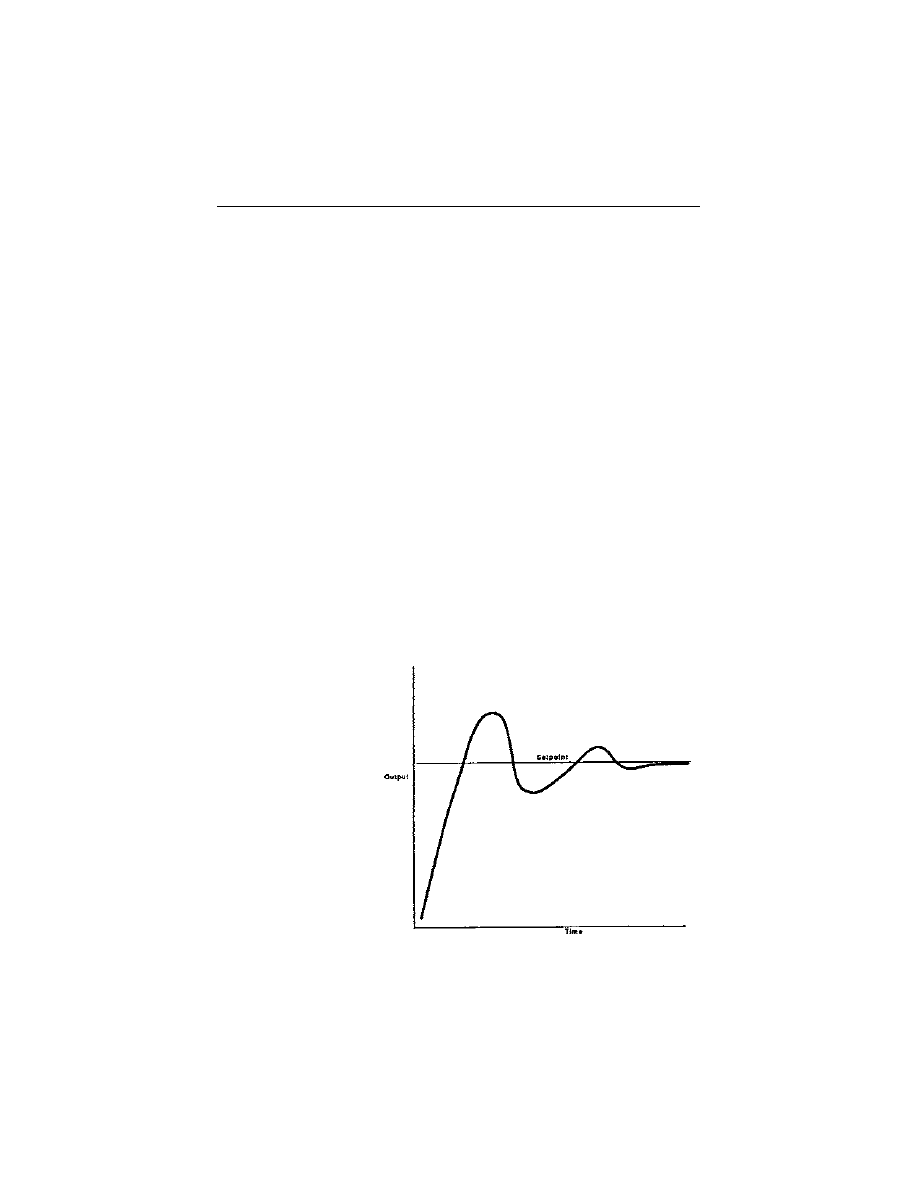
With Proportional-Integral control we have the ability to:
1. Respond to the presence of an error in the control loop.
2. Relate the magnitude of the control signal to the magnitude of the error.
3. Respond to the existence of offset over time to achieve zero error or
setpoint.
shows the control response typically produced with Propor-
tional-Integral control. The significant difference is the elimination of Offset once
the system has stabilized.
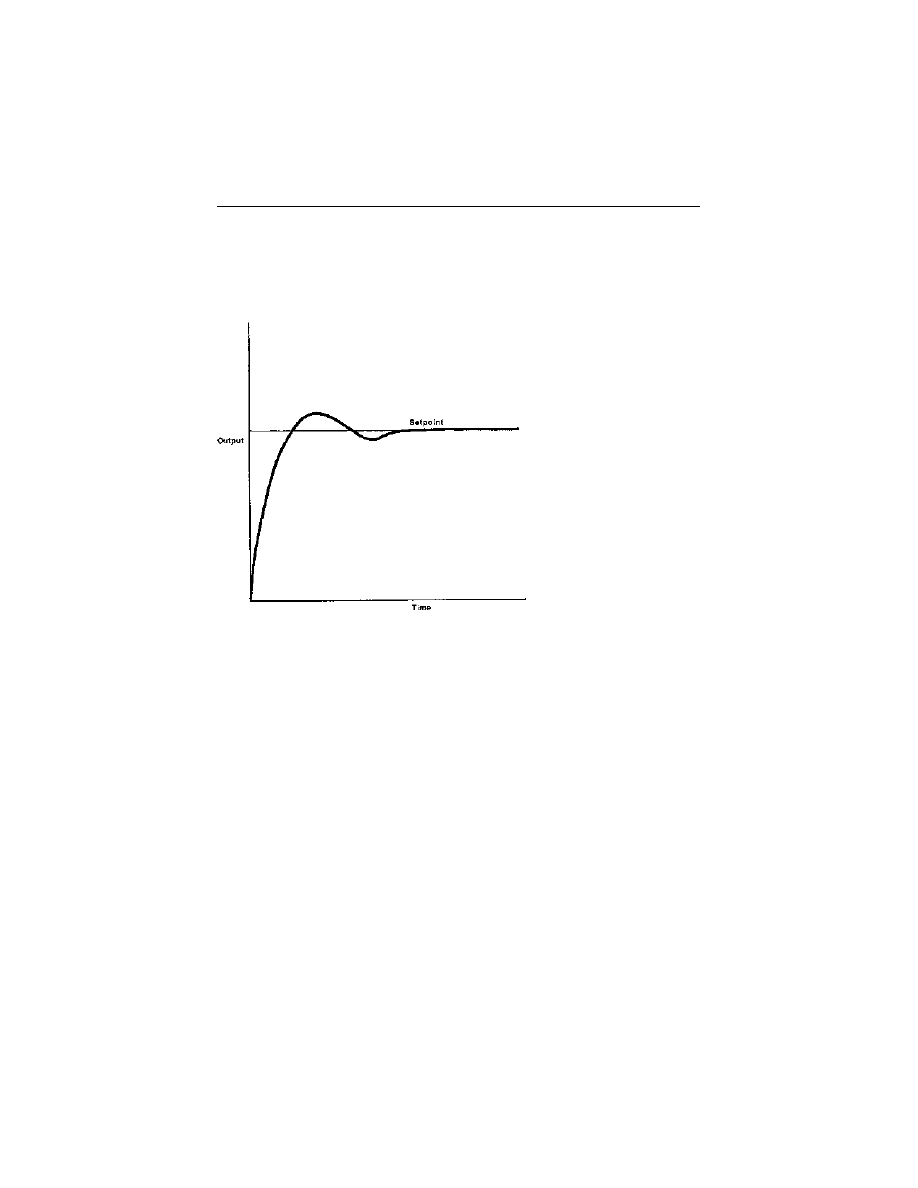
At this point one other major factor often present in modulating control
loops still needs to be addressed. That factor is Overshoot.
Overshoot refers to the tendency of a control loop to over compensate for
an error condition, resulting in a new error in the opposite direction.
As an example, consider a room with a setpoint of 72 degrees and an
actual temperature of 68. A proportional controller would respond to this error by
sending a control signal of some magnitude to the damper supplying warm air
to the room. As the room heats up the magnitude of the control signal to the
damper is reduced, but not until the room reaches setpoint would the control
signal eliminate further
heat input by closing the
damper. At this point
however the thermal in-
ertia of the room causes
the temperature to con-
tinue to rise for some
period of time. The re-
sult is that the room
“overshoots” the set-
point becoming warmer
than desired. The room
now requires cooling in
order to return to set-
point. The Overshoot
phenomenon not only
impacts comfort but also
results in energy waste
due to overheating and
overcooling. Derivative
action (the D in PID) is
(Continued)
PROPORTIONAL INTEGRAL CONTROL
Figure 5-1b
5-1. P.I.D. Control (Continued)
©2002 by The Fairmont Press
designed to address
Overshoot. It provides an
anticipatory function that
exerts a braking action
on the control loop.
The Derivative term
is based on the rate of
change of the error. It
looks at how fast the ac-
tual condition is ap-
proaching the desired
condition and produces a
control action based on
this rate of change. This
additional control action
anticipates the conver-
gence of the actual and
desired conditions, in ef-
fect counteracting the
control signal produced
by the Proportional and
Integral terms. The effect
is a significant reduction
in overshoot.
Combined, Proportional, Integral and Derivative action provide quick re-
sponse to error, close adherence to setpoint, and control stability, as seen in
Figure 4. Notice the reduction in Overshoot and elimination of Offset. (Propor-
tional Integral Control Signal)
Application of PID in Building Control
While the theory behind PID control is not new there has been a dramatic
increase in its use due to the relative ease with which today’s building control
systems can implement it. Once available only in expensive process control
computers, the software features of today’s building control systems can provide
Proportional, Proportional Integral and Proportion-Integral-Derivative action
where needed, with relatively simple programming instructions.
The increased availability of PID control is to a large extent responsible for
the dramatic improvements in control precision seen with the use of building
control systems. Control loops such as Chiller Capacity Control, Static Pressure
Control. Discharge Air Temperature Control, etc. can all be controlled reliably
and precisely using PM action, providing improved operating efficiency over that
available with conventional control systems.
PROPORTIONAL INTEGRAL
DERIVATIVE CONTROL
Figure 5-1c
5-1. P.I.D. Control (Continued)
©2002 by The Fairmont Press

able from pneumatic control devices. This flexibility allows changing
any setpoint of control strategy without interrupting system operation.
DDC software, for control of HVAC and other building systems, falls
into seven basic categories.
Sensor reading programs measure temperature, relative humidity,
flow, pressure, lighting level and do other things including conversion,
linearization, and square roots. They also read switch inputs (two posi-
tion on/off) and totalize pulsing units (such as from power meters) to
measure energy consumption.
On/off control programs operate start-stop devices according to
analog sensor values, such as turning on at one temperature and off at
another; switch inputs, such as manual override and device status indi-
cation; and time, as in occupied and unoccupied schedules for HVAC
and lighting.
Modulating control programs operate variable position devices,
such as valves and dampers, based on a constant, fixed setpoint, and a
reset schedule. An example would be resetting hot water supply tem-
peratures based on the outside air temperature.
First generation DDC controllers accomplished adjust commands
using proportional-integral-derivative (PID) control in 2 different
methods. One method requires a feedback signal from the servo device
in order to re-adjust a control command from the PID controller. The
controlled variable is compared to the command or setpoint. The PID
controller then calculates how far to move from the previous spot in
order to get to setpoint. It then takes the appropriate and corrective
actions to get to that spot. Seeing how re-adjusts are done, this is
closed loop control. This method is used when programming needs
the servo feedback variable value in order to accomplish hardware
sequencing, hardware minimum positioning, etc. The second method of
control is simply to make an adjustment based on the difference be-
tween setpoint and variable. At predetermined time intervals the vari-
able is then retested to determine the amount of change which has
occurred. This value is then used to recalculate how much further to
re-adjust to obtain setpoint. This process continues until deadband is
reached. Both methods use proportional, integral, and derivative gain
terms in their calculations. Both methods use PWM (Pulse Width
Modulation) techniques. PWM changes its positioning device or servo
by sending an output of variable time length to drive a motor which
varies a pneumatic or electric operator.
©2002 by The Fairmont Press

Present-day PID controllers can use the PWM method of control
but also can use Analog control. Analog PID controllers can be tuned for
each loops’ individual characteristics. The servos are integral to the
analog output, therefore, the output value is presented directly to the
electric or pneumatic operator. This value is calibrated to be in direct
proportion to the range of the controlled variable. For example, if the
controlled variable is 3 degrees away from setpoint, the system knows
that an increase of “x” percent will open or close the actuator the correct
amount to move the controlled variable directly to setpoint. The PID
controller knows this because the throttling range of the actuator is cali-
brated for 0.0 to 100.0 percent. PID loop tracking learns the values
needed to generate the precise output value. The value of the PID com-
manded output is the actual percentage of actuator open position. For
example, if the commanded output value is 68.0 percent, the actuator
will be 68.0 percent open, considering there are no failures in the actua-
tors themselves. This value may be read directly by the DDC for moni-
toring position, or can be ranged to an Analog Data point which can
change the readout to any value however no additional hardware is
required as in first generation DDCs with the PID feature. Changing the
readout value requires additional software points and software genera-
tion. Outputs may be 0-20 mA, 0-10 vdc, or 0-20 psi, with any range of
values between these minimums and maximums.
Current, modern day DDC with Analog PID is by far the best
method of DDC reset control. The advantages are more accurate control
with little or no hunting, and the elimination of the old reset servo
devices which increases the chances of mechanical failures over time.
High level optimizing programs are used for pieces of equipment
with multiple control loops and considerations, especially air handling
unit optimization (including VAV systems with or without return fan
tracking and guaranteeing minimum outside air ventilation) and chiller
and boiler plant optimization.
Another category of programming is for energy management op-
timizing routines, such as load deferral (demand limiting and duty cy-
cling), optimizing start/stop; and enthalpy changeover from air han-
dling units.
Alarm and reporting programs provide critical and routing alarms,
data and trend logging, and energy reports.
Finally, operator interface programs can display floor plans and
equipment locations, display equipment schematics and real time oper-
©2002 by The Fairmont Press

ating data, and provide simplified menu-driven operation.
All temperature control, energy management, and automation
functions can be accomplished with these software categories.
ADJUST COMMANDS
Adjust commands on older systems were done strictly via op-
erator commands from the central computer. When a command was
given the system would compare the difference between the com-
mand and the actual position of a position of a potentiometer located
in a servo type of device. The system would then send out a voltage
of the proper polarity in order to force the servo feedback to match
the command. This was typically done on a one shot basis meaning
that if the two values did not match after one try, no other com-
mands were issued automatically. The operator would be required to
resend another command. The output of this servo was generally
pneumatic, but in some cases was electric. The pressure output was
in no way related to the feedback readout other than by mechanical
means. The range of pressure output was not adjustable. If the set-
point of a pneumatic controller was being reset, the only indication of
real setpoint was the actual value of the variable being adjusted. No
controlled loop actions took place.
Later systems became more sophisticated in that the feedback for
its adjust commands was the actual temperature itself. The operator
command was a temperature or humidity etc. which the system com-
pared to the controlled variable for determination of how far to move
the servo device. This method was a step toward closed loop control but
was not actually because the system did no re-adjusting in order to force
the controlled variable to the command. In this case the output pressure
ranges were adjustable but the output value did not reflect setpoint or
position. The controlled variable was the only indication of setpoint or
position.
ADVANTAGES
The decision to use DDC can be based on the expected value of
both energy and labor cost savings. DDC saves significant energy dol-
©2002 by The Fairmont Press

lars through accurate control and by maintaining setpoint adjustments
that do not change with time.
Since DDC integrates temperature control and energy management
in the same system, comfort consideration can be incorporated into
more sophisticated energy management programs, such as demand lim-
iting by temperature and duty cycling within deadband setpoint.
Advanced control functions are available with the microprocessor.
A prime example would be calculating minimum percent outside air,
using outdoor, return, and mixed air temperature sensors. Large energy
savings can be realized in this way, since almost all other control sys-
tems invariably use too much outside air. Once again, a small error here
produces substantial waste of heating or cooling Btus. With air volume
systems, minimum ventilation requirements can be guaranteed to pre-
vent complaints resulting from stale air and improve indoor air quality.
The reliability, accuracy, and convenience of DDC reduces labor
required for HVAC maintenance and allows for reassigning personnel to
other important functions.
DDC requires both hardware and software. The hardware must be
reliable, industrial grade, and engineered to interface with equipment.
The software must be of a design proven to be comprehensive, flexible,
and easy to use. DDC improves building operation in four ways. It re-
duces energy consumption, reduces HVAC maintenance labor, improves
and assures occupant comfort, and provides greater operating conve-
nience.
DDC provides enormous control flexibility and very accurate in-
formation. It allows building operators to reduce costs and provide
better services at the same time. And the life-long accuracy of DDC
overcomes the inevitable decay of other controls. Computer technology
has finally come of age in its ability to simplify and improve building
systems control.
The cost per point for the DDC system is usually higher than that
of the other classes, but the following additional benefits are often suf-
ficient to justify the extra cost.
1.
DDC systems are expandable in terms of the number of points able
to be monitored, software packages available, and operational
functions.
2.
They are more reliable than pneumatic control systems.
©2002 by The Fairmont Press

3.
Failure of the central operator station computer does not upset the
individual control units because satellite microprocessors are pro-
grammed to stand alone in such cases.
4.
Larger operator station computer memory allows building man-
agement to use a preventive maintenance program and perform
energy audits for the different buildings or areas of a single build-
ing.
5.
Electronic components are usually available from several computer
manufacturers. This has the advantage that the customer is not
restricted to a particular company for equipment maintenance,
and, in most cases, results in a reduction in the operation cost of
the system.
6.
Although the initial cost of DDC systems is relatively higher, the
payback period is comparable with those of smaller systems.
7.
In most cases, DDCs do not reduce manpower requirements, but a
central operator-controlled system can assist in making building
management and maintenance personnel more efficient, particu-
larly when implementing effective preventive maintenance pro-
grams.
Microprocessors are quickly becoming a cost-effective method of
system control offering a superior system of distributed intelligence.
They minimize host computer requirements, increase the speed and
accuracy of control, and drastically reduce system maintenance require-
ments.
©2002 by The Fairmont Press
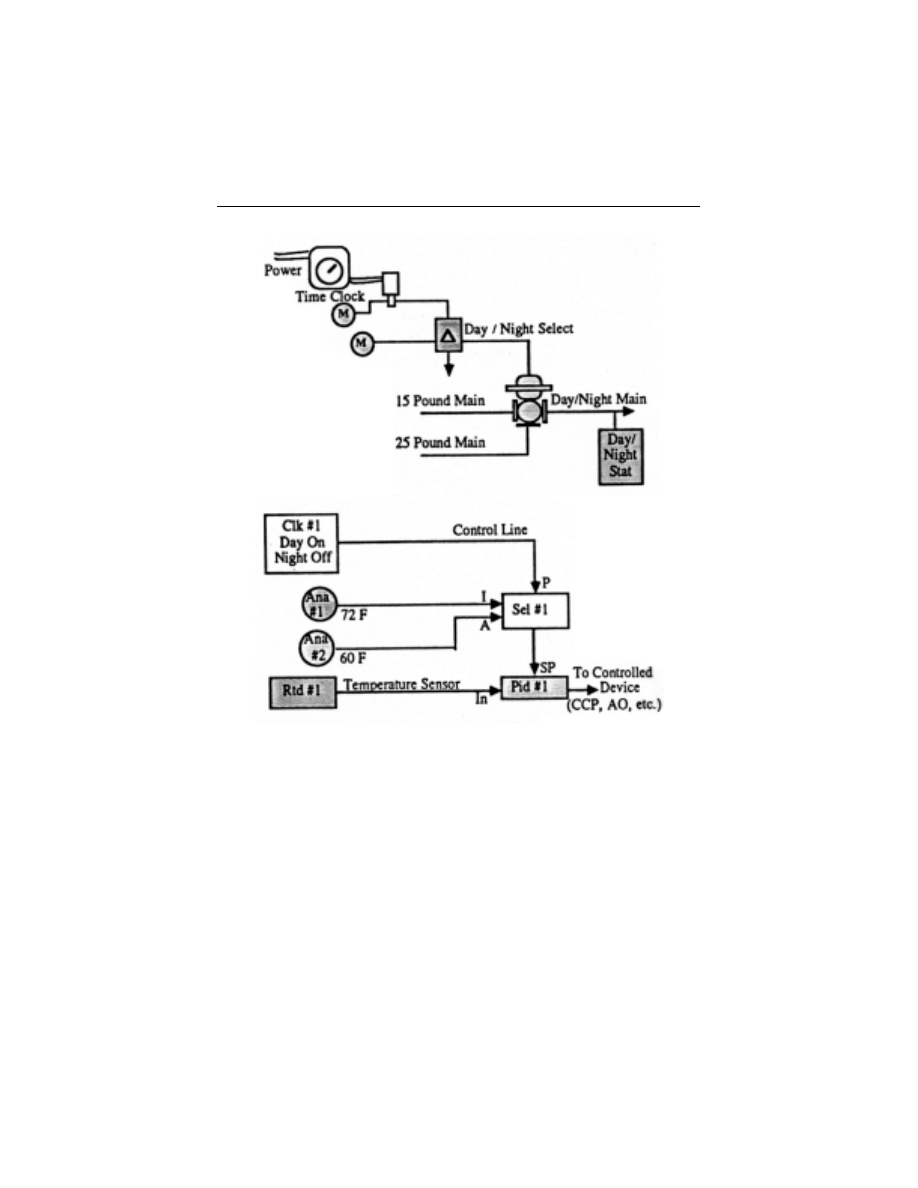
5-2. Pneumatic Vs DDC-D/N Stat
©2002 by The Fairmont Press

N
ETWORKING
47
Chapter 6
Networking
arly methods of remote monitoring or “communicating” be-
tween two distant points relied on single pneumatic tubes or
low voltage electronic circuits to relay information. During the
1970’s scanners were used with multiple systems to simultaneously
transmit two or more messages on a single channel electronically, how-
ever, response time was slow and if the central processor failed, the
entire system was down.
Also during the 1970’s, data communications companies, realizing
that obsolescence had overtaken conventional computer networks hav-
ing one large central computer with several remote terminals connected
to it by telephone lines, determined that distributed data processing was
shown to be a more efficient way to do the job.
Distributed processing, in brief, replaces the one large central com-
puter with multiple smaller computers, or microprocessors, geographi-
cally or functionally separated, which cooperate in the support of user
requirements. Connection between the multiple microprocessor and the
other devices in the network is through various common carriers or
private transmission methods.
Today, in the HVAC-EMS business, the transition from centralized
EMSs to distributed networks, enters the data communications world.
Data Communications—the transmission of words or symbols from a
source to a destination—is no longer exclusive to the business world. Its
pervasive impact is now being felt in the HVAC-EMS profession. Under-
standing the explanations of bits, bytes, baud rate, LAN, ARCNET, to-
ken ring network, IBM-PS/2, modems, RS-485, peer-to-peer, as well as
a host of other communications terms will assist the EMS user to under-
stand their EMS.
E
©2002 by The Fairmont Press

LAN (LOCAL AREA NETWORK) TOPOLOGY
During recent years, EMS manufacturers have been using explana-
tions to describe their systems such as:
“The System “X” Facility Management System utilizes a unique
tiered LAN architecture and a family of intelligent Distributed
Control Units … System “X” is based around the use of multiple
“token passing” LANs functioning in a tiered environment. This
open-ended architecture allows the system … (1988-Control Sys-
tems International, Carrollton, Texas).
“A built-in RS-485 communication trunk is provided … a second
RS-485 trunk is provided to control universal points … high speed
64 kilobits per second peer-to-peer LAN option enables fast sys-
tem-wide response to …” (1989-Barber-Colman, Loves Park, Illi-
nois).
“The LAN selected uses industry standard ARCNET, which is a
token bus network transmitting at 2.5 Megabits to all devices
called nodes which … a second bus is based on RS-485 and Opto-
22’s “Optomux” protocol, which uses a baseband, 9600 baud, ASII
character for its signaling method and … “(1990-Johnson Controls,
Inc., Milwaukee, Wisconsin).
“Network protocol is IBM SDLC operating at a speed of 1,000,000
Baud … communication ports consist of (2) RS232C smart control-
lers with (1) optional RS232/RS485 port for …” (1989-Delta Con-
trols, Inc., Surrey, British Columbia, Canada).
LAN, in its most basic form, is a data communication facility pro-
viding high-speed switched connections between processors, peripher-
als, and terminals within a single building or between buildings.
The ideal LAN would be an information distribution system that
is as easy to use as the conventional AC power distribution system in a
building. Thus, adding a data terminal, processor, or peripheral to a
local area network should require nothing more than plugging it into a
conveniently located access port. Once plugged in, it should communi-
cate intelligently with any other device on the network. This ideal sys-
tem is summarized by the features that make the AC power system so
easy to use:
©2002 by The Fairmont Press

1.
One-time installation.
2.
Widespread access.
3.
Application independence.
4.
Excess capacity.
5.
Easy maintenance and administration.
If an information distribution system were available with all the
desirable properties listed above, it would mean that telephones, data
terminals, printers, and storage devices could be moved as easily as
unplugging and plugging in a lamp. Moreover, the equipment could be
supplied by a variety of vendors. Although, such an ideal system does
not now exist, local area networks of several forms represent some of the
first steps in the development of such a system.
There are four major obstacles that must be overcome in the devel-
opment of the ideal LAN:
No Single Standard
Due to the continually changing status of LANs and competi-
tive nature of the vendors, a variety of local area network stan-
dards exist — both official and de facto. The situation is improving,
however, because even the dominant suppliers who have been
protecting their proprietary interfaces are being pressured by a
maturing market to release interface specifications.
Diverse Requirements
The communications needs of a modern office building in-
clude voice, video, high-speed data, low-speed data, energy man-
agement, fire alarm, security, electronic mail, etc. These systems
present transmission requirements that vary greatly in terms of
data rates, acceptable delivery delays, reliability requirements, and
error rate tolerance.
Costly Transmission Media
Being able to deliver tens of megabits per second to one de-
vice and only a few bits per second to another implies that the
lower rate devices are burdened with a costly transmission media.
The best economic solution must involve a hierarchical network
design (one with stepped levels of capacity) that allows twisted
pair connections for low and medium data rate devices (a low
©2002 by The Fairmont Press

step) feeding into a backbone high bandwidth transmission system
(a higher step) such as coaxial cable or optical fibers. However, one
must be careful so that the cost of active components used for
getting on and off the network does not outweigh the lower fiber
costs.
Sophisticated Functional Requirements
Providing a network with the desired data rates and dis-
tances is only one item that must be considered in the data com-
munications problem. Before one data device can communicate
intelligently with another, numerous higher level communications
functions must be compatible. These include codes, formats, error
control, addressing, routing, flow control, access control, configu-
ration management, and cost allocations.
The first, most important non-proprietary data communications
network to technically qualify as a LAN was Ethernet (a trademark of
Xerox Corp.). The coaxial cable used in Ethernet can handle transmis-
sions at 10 Mbs over one channel. A channel is defined as a physically
independent direct pathway between two devices or separate carrier
frequency on the same path.
The Ethernet architecture is based in concept on a system that al-
lows multiple distributed devices to communicate with each other over
a single radio channel using a satellite as a transponder. One station
communicates with another by waiting until the radio channel is idle
(determined by carrier sensing) and then sending a packet of data with
a destination address, source address, and redundant check bits to de-
tect transmission errors. All idle stations continuously monitor incoming
data and accept those packets with their address and valid check sums.
Whenever a station receives a new packet, the receiving station returns
and acknowledgment to the source. If an originating station receives no
acknowledgment within a specified time interval, it retransmits the
packet under the assumption that the previous packet was interfered
with by noise or by a transmission from another station at the same
time. (The latter situation is referred to as a collision, which is overcome
by networks using a baseband protocol called CSMA/CE Carrier Sensed
Multiple Access/Collision Detection.) The Ethernet employs the same
basic system concept using coaxial cable distribution throughout a
building or between multiple buildings. See
©2002 by The Fairmont Press
Because access to the Ethernet involves a certain amount of conten-
tion (competition) between stations trying to send a message at the same
time, the behavior of the network must be analyzed and controlled in a
statistical manner. Token passing networks, on the other hand, provide a
different access procedure. Access is determined by which station has
the token; that is, only one station at a time, the one with the token, is
given the opportunity to seize the channel. The token is passed from one
idle station to another until a station with a pending message receives
it. After the message is sent, the token is passed to the next station. In
essence, a token passing network is a distributed polling network.
Two basic topologies (configurations or arrangements) exist for
token passing networks: Token Passing Rings and Token Passing Buses. In
a token passing ring, shown in
the closed loop topology
6-1. Ethernet Configuration
©2002 by The Fairmont Press
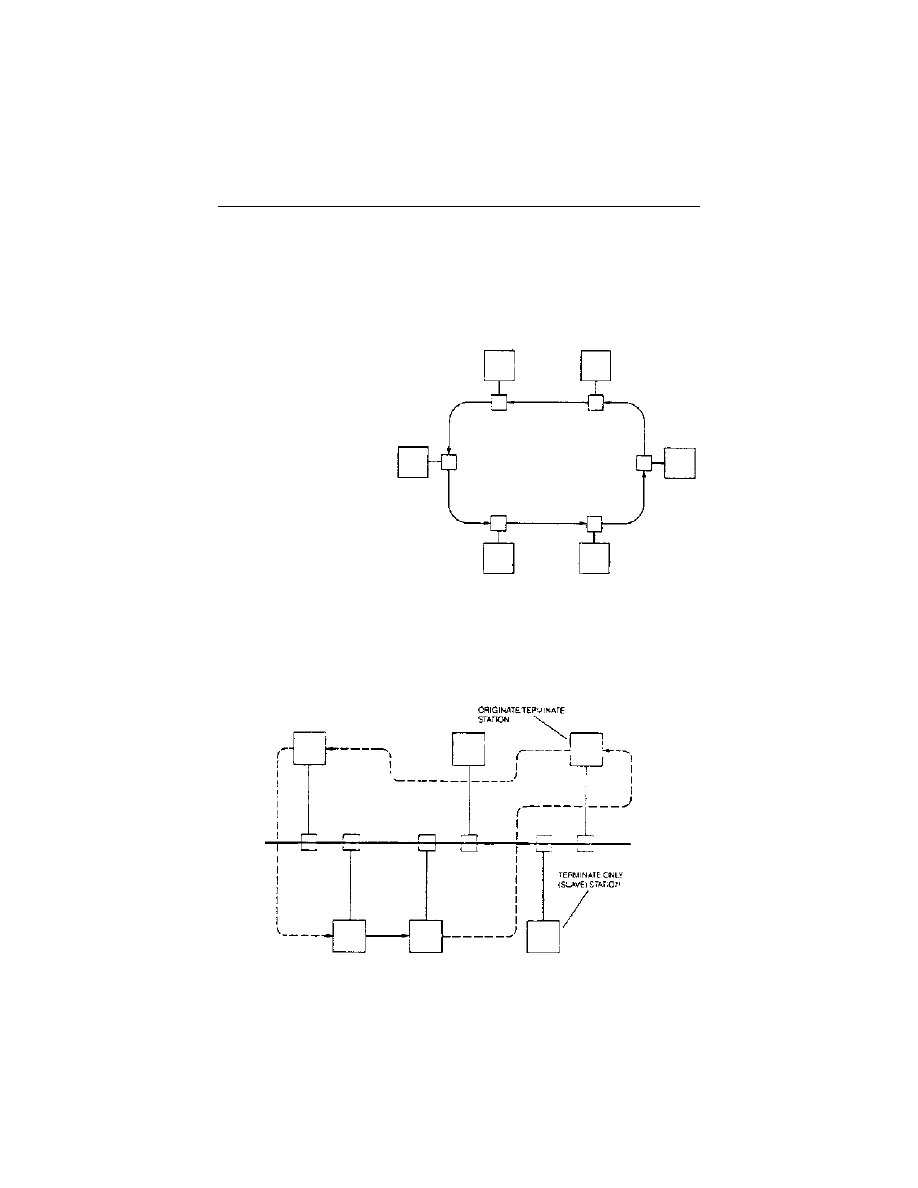
defines the logical topology (that is, the order in which the token is cir-
culated). A token passing bus, shown in Figure 6-3, has more operational
flexibility because the token passing order is defined by tables in each
station. If a station (for example, a printer) never originates communica-
tions, it will be a termi-
nate-only station and
need not be in the poll-
ing sequence. If a sta-
tion needs a high prior-
ity, it can appear more
than once in the polling
sequence.
The forerunner of
token passing networks
in the U.S. is the At-
tached Resource Com-
puter Network,
ARCNet, developed by
Datapoint Corporation.
Initially, the network
and protocol were kept
proprietary, but the data link protocol, interface specs, and even inte-
grated circuits were made publicly available in 1982. Functionally, the
Figure 6-3. Token Passing Bus
Figure 6-2. Token Passing Ring
©2002 by The Fairmont Press
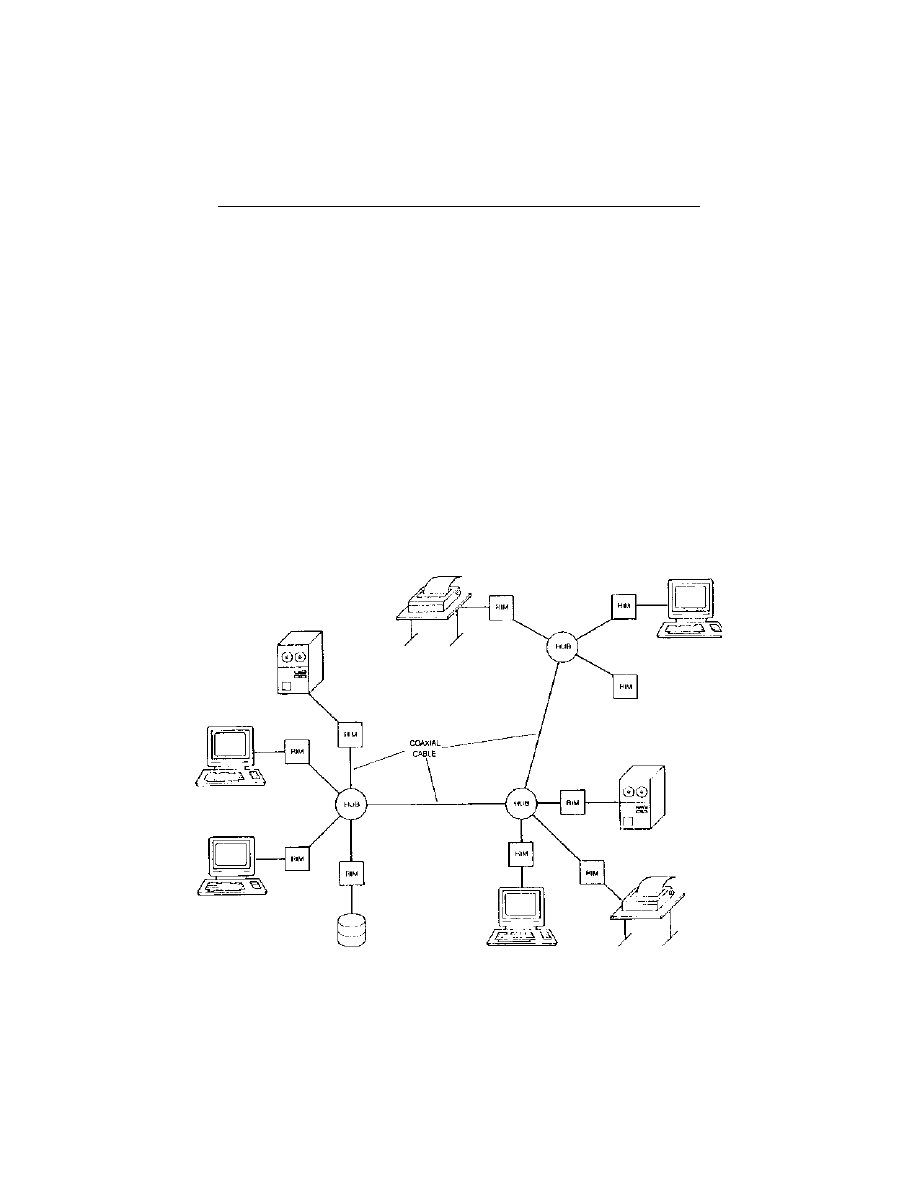
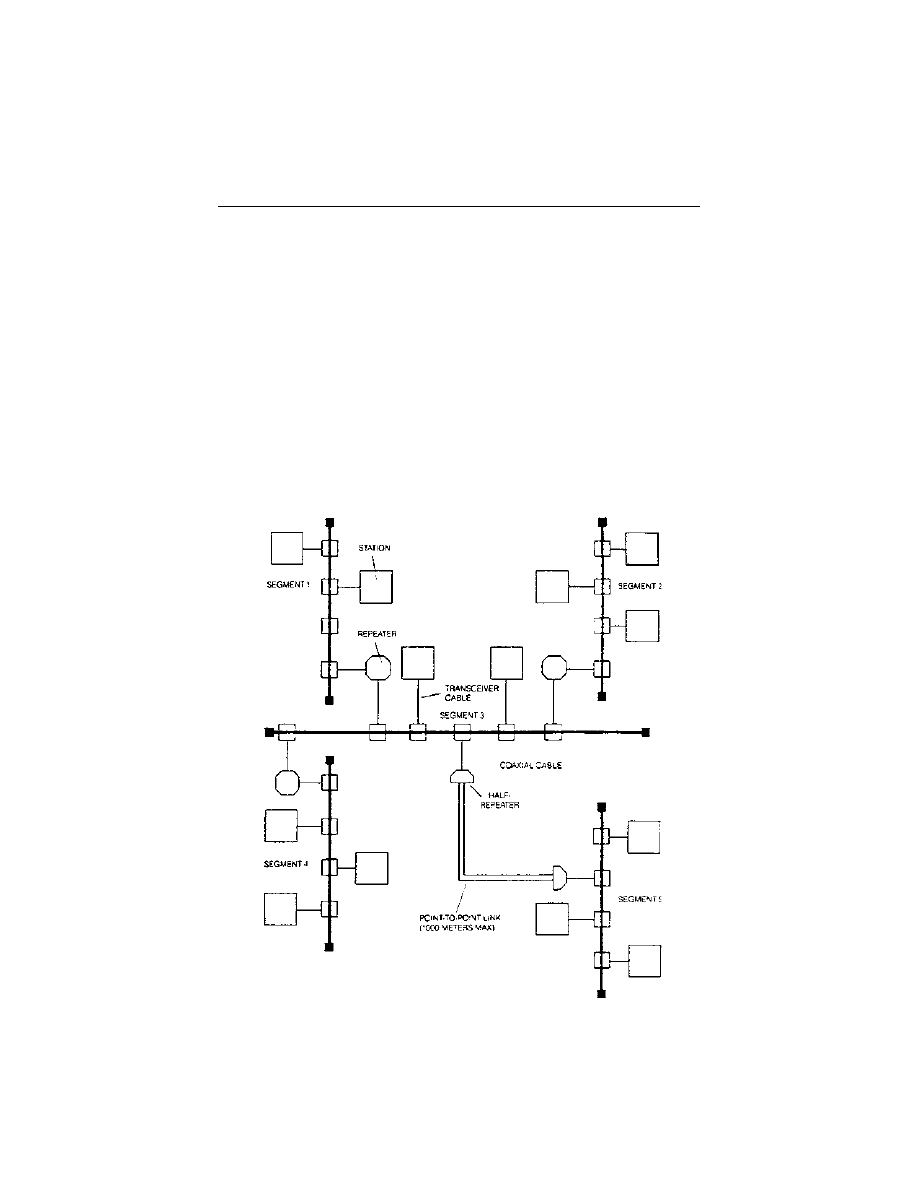
Figure 6-4. ARCNET Configuration
ARCNet is a token passing bus, but the physical topology, shown in Fig-
ure 6-4, is a hybrid bus/star. Rather than distribute taps along a linear bus
as suggested in
the ARCNet uses hubs with individual ports
to connect Resource Interface Modules (RIMS) to the transmission media.
The hub based architecture is an effective means of controlling the
signal quality because the hub isolates each RIM port from the main
coaxial cable. Unidirectional (one-way) amplifiers in the hubs provide
zero insertion loss and suppress reflections because only one direction of
transmission is enabled at a time. Amplifier switching is possible be-
cause a token passing network only transmits in one direction at a time.
The ARCNet interconnects the hubs and RIMs with RG62 coaxial
cable using baseband transmission at 2.5 Mbps (baseband vs. broad-
band: limits on baseband include less than 10 Mbps, low frequency,
twisted pair/coax less than 2 miles; limits on broadband include greater
©2002 by The Fairmont Press

than 10 Mbps, digital and analog, and long distances). Although 2.5
Mbps is a relatively low data rate, ARCNet uses inexpensive coax and
can be configured (laid out) with as much as four miles between sta-
tions. The cable length between a hub and a RIM is limited to 2000 feet,
but a four-mile span can have up to a maximum of ten hubs in a series
path.
Local area network standards (as with other communication stan-
dards) get established in two ways: by dominant manufacturers who
attract plug compatible competitors, and by official standards organiza-
tions. The leading official standards organization for LANs in the U.S. is
the IEEE 802 Standards Committee. This committee has several working
groups responsible or establishing these LAN standards:
1.
802.1 — Coordinating the interface between OSI Levels
1 & 2 with the five higher level layers.
2.
802.2 — Logical data link standard similar to HDLC
and ADCCP.
3.
802.3 — CSMA/CS standard similar to Ethernet.
4.
802.4 — Token Bus standard.
5.
802.5 — Token Ring standard.
Each of the LAN system architectures presented previously have
unique technical and operational advantages and disadvantages.
No presently available single LAN system architecture can eco-
nomically satisfy the needs of all communications within a building or
between multiple buildings. Nor is it likely that one system will ever
evolve to economically fulfill these needs. Thus, there will always be a
need for either separate systems tailored to specific applications or pos-
sibly hybrid systems employing the best features of selected individual
architectures.
EMS manufacturers that apply these hybrid-type systems will be
one step ahead of the competition. (See
MEDIA/TRANSMISSION METHODS
Transmission Methods—General
A number of different transmission systems and media can be used
in an EMS for communications between the field panels and Central
©2002 by The Fairmont Press

operator station. These transmission systems include twisted pairs,
voice grade telephone lines, coaxial cables, electrical power lines, radio
frequency, and fiber optics. (See
Twisted pairs
A twisted pair consists of two insulated conductors twisted to-
gether to minimize interference by unwanted signals.
Twisted pairs can carry information over a wide range of speeds
depending on line characteristics. To maintain a particular data commu-
nication rate, the line bandwidth or the signal to noise ratio may require
adjustment by conditioning the line. Twisted pairs are permanently
hardwired lines between the equipment sending and receiving data, or
switched lines routed through the telephone network. Switched lines
have signaling noise, such as ring signals within the data bandwidth,
that can cause impulse noise resulting in data errors.
The nominal bandwidth of unconditioned twisted pairs is between
300 and 3000 Hz. For each Hz of available bandwidth, 2 bps can be
transmitted. A twisted pair with a bandwidth of 2400 Hz can support a
4800 bps data rate.
Hardwired twisted pairs must be conditioned in order to obtain
operating speeds up to 9600 bps. Data transmission in twisted pairs, in
most cases, is limited to 1200 bps or less.
Voice Grade Lines
Voice grade lines used for data transmission are twisted pair cir-
cuits defined as type 3002 in the Bell Telephone Company publication
standard BSP 41004. The 3002 type line can be used for data transmis-
sion up to 9600 bps with the proper line conditioning. The most com-
mon voice grade line used for data communication is the unconditioned
type 3002 that allows transmission rates up to 1200 bps. Voice grade
lines must be used with the same constraints and guidelines as for
twisted pairs.
Coaxial Cable
Coaxial cable consists of a center conductor surrounded by a
shield. The center conductor is separated from the shield by a dielectric.
The shield protects against electromagnetic interference. Coaxial cables
can operate at data transmission rates in the megabits per second range.
Attenuation becomes greater as the data transmission rate increases. The
©2002 by The Fairmont Press
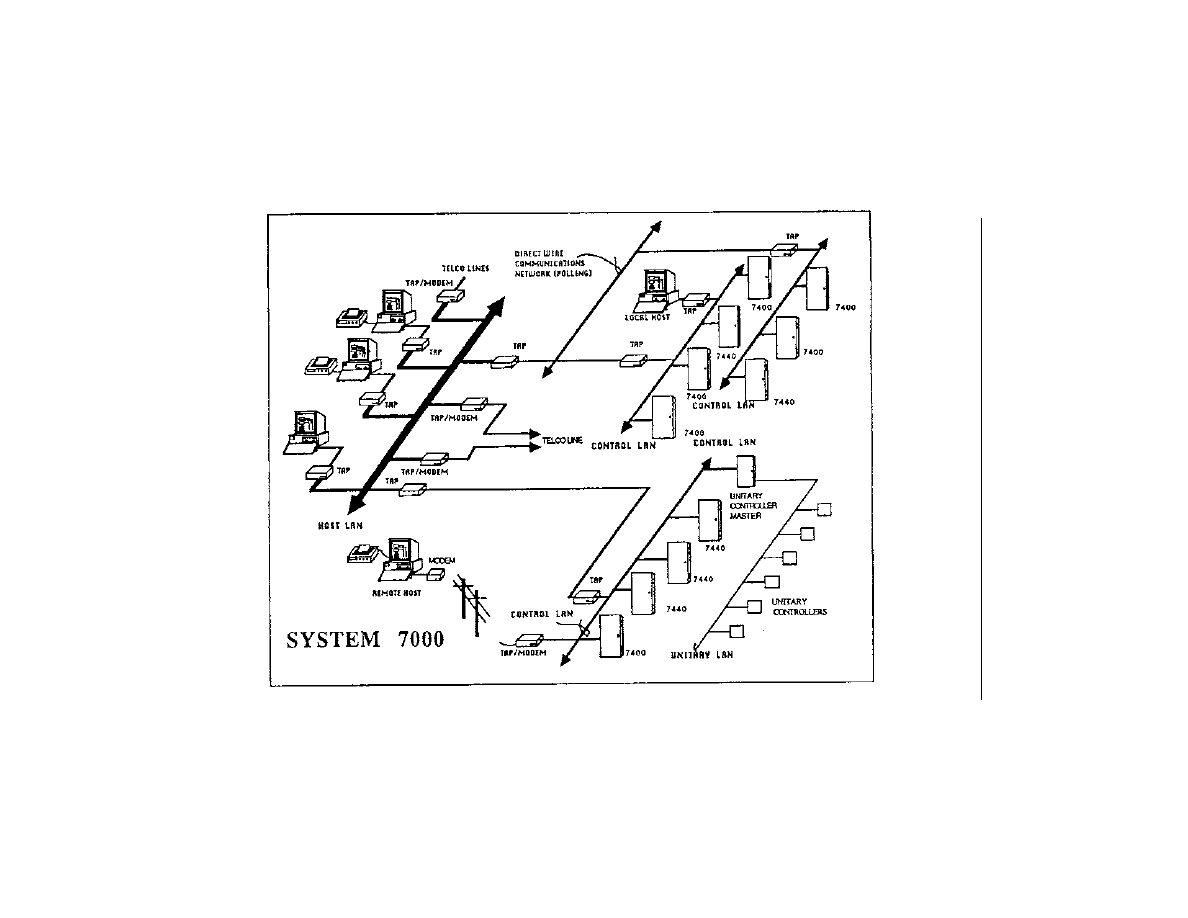
Figure 6-5. C.S.I.—LAN
©2002 by The Fairmont Press

INTRODUCTION
The System 7000 Facility Management System
utilizes a unique tiered Local Area Network (LAN) archi-
tecture and a family of intelligent Distributed Control
Units (DCUs) to provide a control network of as few as
100 points or as many as 100,000 points. This allows
for centralized command and control of many widely
distributed processes with unprecedented reliability and
speed.
OVERVIEW
The System 7000 is based around the use of
multiple “token passing” LANs functioning in a tiered
environment. This open ended architecture allows the
system to support hundreds of terminal work stations
and tens of thousands of points with response times
not found in today’s systems.
HOST LAN
At the top of this tiered LAN architecture is one
or more Host LANs. A single host LAN can support a
single PC work station or as many as eight (8) PC
work stations. All work stations are communicating
over a single pair of wires on the Host LAN in a multi-
tasking/multi-user environment with one or more con-
troller LANs.
Utilizing the Host LAN structure, one or more
work stations may communicate with over 1,000 re-
mote controller LANs, each capable of supporting 63
Distributed Control Units.
The Host LAN, as well as the controller LAN
utilizes a CSI proprietary protocol for LAN communi-
cations. Equipment not designed for direct communi-
cation with the LAN must utilize a “gateway” or TAP
into the LAN. These firmware specific TAPs provide
for messaging, protocol conversion, AA/AD (Auto An-
swer/Auto Dial) and much more.
©2002 by The Fairmont Press
INDUSTRY STANDARD ARCNET
ARCNET is a token bus network Initially developed by Datapoint Corporation as a
very fast, 2.5 Megabit communications link for computer-to-computer connections. The
technology was licensed to third party electronics firms to manufacture ARCNET control
chips, making low cost token passing networks readily available to many industries. It
wasn’t long before ARCNET moved from the office to the shop, as system integrators
realized that the network’s reliability, noise immunity, predictability, and low cost were
perfect for allowing automated machines to communicate with each other on the factory
floor. Growth in demand led to second sourcing of the control chips, and the development
of new configuration and cabling options. As many more manufacturers adopted the use
Figure 6-6. J.C.I.—LAN
©2002 by The Fairmont Press
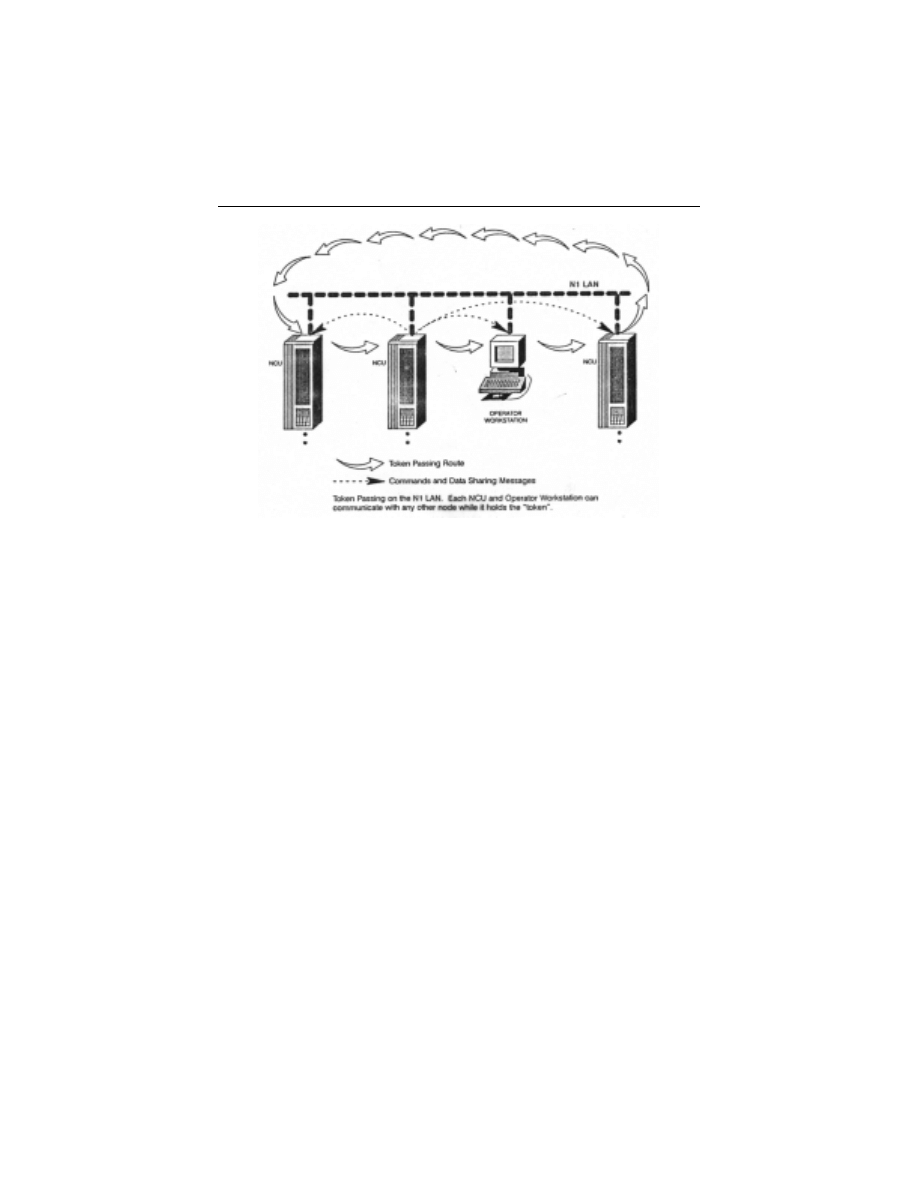
of ARCNET in their systems, the ARCNET Trade Association was formed to provide a user
forum for maintaining standards, coordinating connectivity issues, and charting future
growth. ARCNET has now become a de facto industry standard, with over 1,000,000
connected devices worldwide.
TOKEN BUS
In ARCNET, devices connected to the network are called nodes, which are ad-
dressed from 1 to 255. Access to the network is controlled by a “token” which is passed
around the network, going from each node to the node with the next address. When a
node has the token, it may broadcast a message to any other node before passing the
token on. This message is received simultaneously by all other nodes, but only responded
to by the node to which the message was addressed. This scheme allows all devices on
the network to operate on a peer-to-peer basis, which means the network is not dependent
on any single device for nodes to share information. Token passing is also deterministic,
which means that the maximum amount of time it takes for a message to be sent from one
node to another is predictable, even under heavy communication traffic conditions. It also
guarantees that every node has access to the network on an equal basis.
ARCNET is self-configuring. If a node should fail, it is automatically removed from
the token passing sequence so that communication is maintained uninterrupted among the
remaining nodes. When a new node is added, or a failed node recovers, ARCNET imme-
diately recognizes the node and adds it into the token passing sequence. Should the
communication trunk be severed, both halves of the network are automatically
reconfigured Into two separate networks, each with the ability to maintain peer-to-peer
communications among the connected nodes.
Network Control Units and Operator Workstations are ARCNET nodes in Metasys.
NCUs optionally have an ARCNET communication circuit integrated within the Network
Control Module. For an Operator Workstation, an ARCNET communication card is installed
in a PC to allow the computer access to the network. ARCNET cards are manufactured
by both Johnson Controls and other vendors.
Figure 6-6. J.C.I.—LAN (Continued)
©2002 by The Fairmont Press
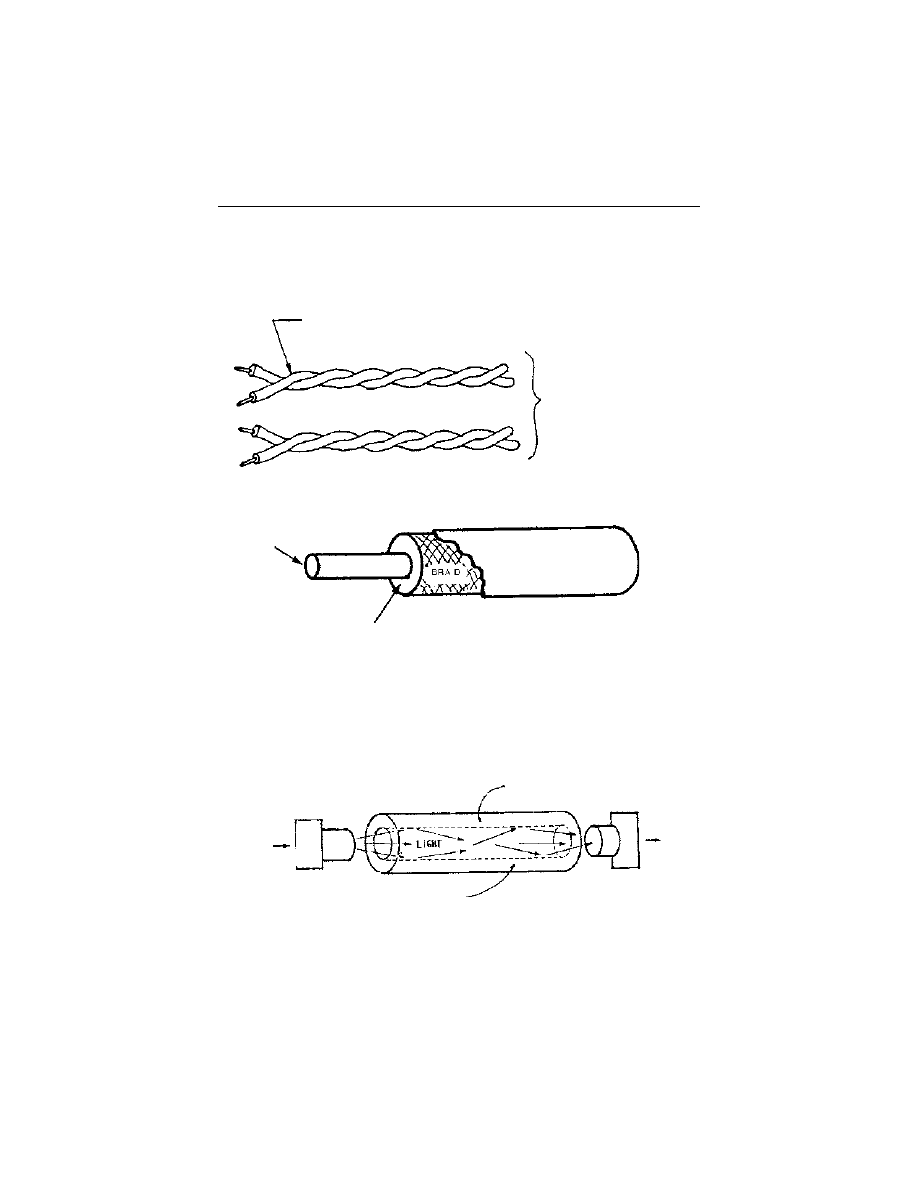
Figure 6-7. Transmission Media
HIGH DATA RATE
ISOLATION
IMMUNITY TO NOISE
SMALL SIZE, WEIGHT
OPTICAL FIBER
ELECTRICAL
SIGNAL
CLADDING
CORE
ELECTRICAL
SIGNAL
LIGHT
SOURCE
LIGHT
DETECTOR
—Outter conducter braided shield
—Inner conductor solid metal
—Separated by insulating material
—Covered by padding (some does not meet fire code)
INSULATION
INNER CONDUCTOR
OUTER COATING
COAXIAL CABLE
COPPER WIRE PAIRS
—Separately insulated
—Twisted together
—Usually installed in buildings when built
—Often “bundled” into cables
—Bandwidth limited to approximately 50 kHz
1 twisted pair = 2-wire circuit = 1 local loop
2 twisted pairs
= 4-wire ckt.
©2002 by The Fairmont Press

transmission rates are limited by the data transmission equipment and
not by the cable. Regenerative repeaters are required at specific intervals
depending on the data rate, nominally every 2000 feet to maintain the
signal at usable levels.
Power Lines
Data can be transmitted to remote locations over electric power
system lines using carrier current transmission that superimposes a low
power RF signal, typically 100 kHz, onto the 60 Hz power distribution
system. Since the RF carrier signal cannot operate across transformers,
all communicating devices must be connected to the same power circuit
(same transformer secondary and phase) unless RF couplers are in-
stalled across transformers and phases permitting the transmitters and
receivers to be connected over a wider area of the power system.
RF
Modulated RF can be used as a data transmission method with the
installation of radio receivers and transmitters. The use of RF must be
coordinated with the communications department to avoid interference
with other facility RF systems. MODEMS must be provided at each re-
ceiver-transmitter location. FM is used in most cases because it is not
susceptible to amplitude related interference.
Fiber Optics
Fiber optics uses the wideband properties of infrared light travel-
ing through transparent fibers. Fiber optics is a reliable communications
media which is rapidly becoming cost competitive when compared to
other high speed transmission methods. It is best suited for point-to-
point high speed data transmission.
The bandwidth of this media is virtually unlimited, and extremely
high data transmission rates can be obtained. The signal attenuation of
high quality fiber optic cable is far lower than the best coaxial cables.
Repeaters required nominally every 2000 feet for coaxial cable, are 3 to
6 miles apart in fiber optic systems. Fiber optics must be carefully in-
stalled and cannot be bent at 90
°
right angles. Additional benefits in-
clude features such as space savings in conduits and freedom from EMI
interference. However, on the other hand, splicing is difficult and there
is the requirement of convertors to get off the fiber optic network.
able 6-1 for a comparison of transmission methods.
©2002 by The Fairmont Press

Table 6-1. Transmissions Methods—Comparison
——————————————————————————————————————————————
Compatibility
First
Scan
Maint.
With Future
Method
Cost
Rates
Reliability
Effort
Expandability
Requirements
——————————————————————————————————————————————
Coaxial
high
fast
excellent
min.
unlimited
unlimited
Twisted pair
high
med.
very good
min.
unlimited
limited
RF
med.
fast but
low
high
very limited
very limited
limited
Microwave
very high
very fast
excellent
high
unlimited
unlimited
Telephone
very low
slow
low to high
min.
limited
limited
Fiber optics
high
very fast
excellent
min.
unlimited
unlimited
——————————————————————————————————————————————
©2002 by The Fairmont Press

MODEMS
MODEM is an acronym for modulator/demodulator. The MO-
DEM is analogous to a telephone set, which converts the voice to an
electric signal at one end of a wire and converts the signal back to sound
at the other end of the wire. MODEMs can communicate between field
panels and controllers when the controller is separate from the field
panel. MODEMS are also used to communicate with an EMS from a
remote location. Upon receiving a signal from a sensor or controller, the
MODEM imposes the information in binary form onto carrier waves.
These waves convey information over communication links known as
data transmission media. The information is imposed on the wave by
altering, or modulating, the wave form; it is then extracted from the
wave by demodulating. In the case of a digital signal from a sensor this
process is straightforward. Analog signals from sensors require analog/
digital converters to condition the signal prior to modulation, MODEMs
are characterized by transmission speed and the way in which modula-
tion is accomplished.
There are two basic modulation classifications—baseband and
broadband. Baseband MODEMs convert data into binary form using
differential current impulses for transmission. However, baseband is not
true modulation because a carrier wave is not modulated. At any point
in time, data transmission along an individual communication link is
limited to a single signal and one direction. Baseband MODEMs are also
known as line drivers, local MODEMs, short-distance MODEMs short-
haul MODEMs, or digital line adapters. They are 50 to 90% less costly
than broadband and are ideal for short-range work. In addition, they
can operate at higher speeds, have fewer internal parts, and are not
subject to errors common in true modulation techniques.
Baseband MODEMs are limited to ranges of two to three miles.
When used with dedicated lines, the lines must have dc continuity -and
cannot have loading coils. In addition, baseband modulation is highly
susceptible to interference when used with existing communication
lines.
In broadband modulation, the frequency, amplitude, or phase char-
acteristics of the carrier wave are modulated. Frequency shift key (FSK)
modulation is most often used with an EMS. In FSK, carrier wave fre-
quency is increased to represent a binary “one” and decreased to repre-
sent a binary “zero.” Similarly, in amplitude modification (AM) and in
©2002 by The Fairmont Press
phase modulation (PM), the amplitude and the phase, respectively, are
increased or decreased accordingly. The amount of data coded on the
signal can be increased by selecting four or eight values (or more) for the
characteristic being modulated; this is not generally done with FSK.
With broadband modulation more than one signal can be sent at one
time and data can be transmitted in both directions simultaneously.
EMS terminology also includes pulse width modulation (PWM).
PWM is a means of directly transmitting digital information; the infor-
mation is never coded in binary form and MODEMs are not involved.
PWM is used with direct digital control systems and is discussed under
The speed of data transmission is measured in bits per second,
which are single binary digits, or in bauds. For EMS applications, one
baud is one bit per second, and speeds of 300, 1200, and 9600 baud are
used. High-speed MODEMs (9600 baud) are normally used when trans-
mission is confined to one building. Lower speeds are used between
buildings; 1200 baud is the prevalent speed.
To summarize, by modulating and demodulating the characteris-
tics of a carrier wave, MODEMs impose and extract data onto and from
wave forms transmitted over the data transmission media. There are
two classes of modulation: baseband, used to transmit minimum
amounts of data short distances; and broadband, used for longer dis-
tances and larger amounts of data. While there are three types of broad-
band modulation, the one most often used with EMS is frequency shift
keying. Data transmission speeds can also vary; the speeds most com-
mon for EMS application are 9600 baud within buildings and 1200 baud
between buildings.
©2002 by The Fairmont Press

S
OFTWARE
/A
PPLICATION
P
ROGRAMS
65
Chapter 7
Software/Application
Programs
INTRODUCTION
oftware packages designed for EMS consist of one or more
money-saving programs that contribute to energy conservation
through efficient energy management. These programs interact
continuously to operate as an integrated system. Consequently, the net
energy savings is the sum of their contributions, making it difficult to
determine the savings from each program. The following programs
perform most of the functions used to save money and energy in build-
ings.
PROGRAMS
Scheduled Start/Stop
The scheduled-start/stop program consists of starting and stop-
ping equipment based on the time of day and day of week. Scheduled
start/stop is the simplest of all EMS functions to implement. This pro-
gram provides potential for energy conservation by turning off equip-
ment or systems during unoccupied hours. In addition to sending a
start/stop command, it is important to have a feedback signal indicating
the status (on-off or open-closed) of the controlled equipment. The feed-
back signal verifies that the command has been carried out and provides
the EMS operator with an alarm when the equipment fails or is locally
started or stopped.
S
©2002 by The Fairmont Press

(Application notes.) The scheduled start/stop program operates in
conjunction with optimum start/stop, day/night setback, ventilation/
recirculation, and lighting control programs.
Optimum Start/Stop
The scheduled start/stop program described can be refined by
automatically adjusting the equipment operating schedule in accordance
with space temperature and outside air (OA) temperature and humidity.
HVAC systems are normally restarted prior to occupancy to cool down
or heat up the space on a fixed schedule independent of OA and space
conditions. The optimum start/stop program automatically starts and
stops the system on a sliding schedule. The program will automatically
evaluate the thermal inertia of the structure, the capacity of the HVAC
system to either increase or reduce space temperatures, and OA condi-
tions. This accurately determines the minimum time of HVAC system
operation needed to satisfy the space environmental requirements at the
start of the occupied cycle, and determines the earliest time for stopping
equipment at the day’s end.
(Application notes.) The optimum start/stop program operates in
conjunction with the scheduled start/stop program, day/night setback,
and ventilation/recirculation programs.
Duty Cycling
Duty cycling is defined as the shutting down of equipment for
predetermined short periods of time during normal operating hours.
This function is normally only applicable to HVAC systems. Duty cy-
cling operation is based on the presumption that HVAC systems seldom
operate at peak design conditions. If the system is shut off for a short
period of time, it has enough capacity to overcome the slight tempera-
ture drift which occurs during the shutdown period. Although the inter-
ruption does not reduce the energy required for space heating or cool-
ing, it does reduce energy input to auxiliary loads such as fans and
pumps. Duty cycling also reduces outside air heating and cooling loads
since the outside air intake damper is closed (under local loop control)
while an air handling unit is off.
(Application notes.) (1) The duty cycling program is used in con-
junction with demand limiting, schedule start/stop, and optimum start/
stop programs. (2) Duty cycling is not advisable for variable capacity
loads such as variable volume fans, chillers, or variable capacity pumps.
©2002 by The Fairmont Press

Demand Limiting
Demand Limiting consists of shedding electrical loads to prevent
exceeding an electrical demand peak value (target). This prevents an
increase in electrical rates where demand oriented rate schedules apply.
Peak demand contract values are established by the utility company
using fixed demand intervals, sliding window intervals, and time of day
schedules. Many complex schemes exist for reducing peak demand bill-
ings; however, all schemes continuously monitor power demand and
calculate the rate of change of the demand value in order to predict
future peak demand. When the predicted peak exceeds present limits,
predetermined scheduled electrical loads are shut off on a prescheduled
priority basis to reduce the connected load before the peak is exceeded.
(Application notes.) (1) The demand limiting program is used in
conjunction with the duty cycling program to prevent any one load from
being cycled on or off during the wrong time interval or an excessive
number of times. (2) The demand limiting program is also used in con-
junction with scheduled start/stop and optimum start/stop programs.
Day/Night Setback
The energy required for heating or cooling during unoccupied
hours can be reduced by lowering the heating space temperature set-
point or raising the cooling space temperature setpoint. This applies
only to facilities that do not operate 24 hours a day. Space temperature
can be reduced from the normal 65
°
F winter inside design temperature
to a 50
°
F or 55
°
F space temperature during the unoccupied hours. In
space that require air conditioning during unoccupied hours, the normal
temperature setting can be reset upwards to a temperature that is com-
patible with the space special requirements. OA dampers for the HVAC
system are closed when the equipment operates during the unoccupied
periods in order to avoid imposing additional OA thermal loads.
(Application notes.) (1) The day/night setback program operates
in conjunction with the scheduled start/stop and optimum start/stop
programs. (2) Space temperature sensors must be located to preclude
freezing during the night setback period.
Economizer
The utilization of an all outside air dry bulb economizer cycle in air
conditioning systems can be a cost effective conservation measure, de-
pending on climatic conditions and the type of mechanical systems. The
©2002 by The Fairmont Press

dry bulb economizer cycle utilizes outside air to reduce the building’s
cooling requirements when the outside air dry bulb temperature is less
than the required mixed air temperature. The changeover temperature at
which outside air is used for cooling is based on the outside air dry bulb
temperature (enthalpy changeover point is determined by the total air
heat content.) When the outside air dry bulb temperature is above the
changeover temperature, the outside air dampers, return air dampers,
and relief air dampers are positioned to provide minimum required out-
side air. When the outside air dry bulb temperature is below the
changeover temperature, the outside air, return air and exhaust air damp-
ers are positioned to maintain the required mixed air temperature. This
program can also be used to compare the dry bulb temperatures of out-
side air with return air: whenever RA temperature is less than OA tem-
perature, OA dampers close to a minimum position. Separate setpoints
can be provided for each HVAC system. Refer to example in
(Application notes.) This program cannot be used where humidity
control is required, or when the enthalpy program is selected.
Enthalpy
The utilization of an outside air enthalpy program can be a cost
effective energy conservation measure, depending on climatic condi-
tions and the type of mechanical system. The enthalpy cycle utilizes
outside air to meet the building’s cooling requirements when the en-
thalpy (total heat content) of the outside air is less than that of the return
air. When the outside air enthalpy is less than the return air enthalpy, the
outside air and return air dampers are allowed to modulate to admit
sufficient outside air to minimize cooling requirements. When the out-
side air enthalpy is greater than the return air enthalpy the outside air
dampers, return air dampers, and relief air dampers are positioned to
provide minimum required outside air.
(Application notes.) The enthalpy program cannot be used when
the economizer program is selected.
Ventilation and Recirculation
The ventilation and recirculation program controls the operation of
the outside air dampers when the introduction of outside air would
impose an additional thermal load during warm-up or cool-down cycles
prior to occupancy of the building. This program can also be used in
those facilities which maintain environmental conditions for electronic
©2002 by The Fairmont Press
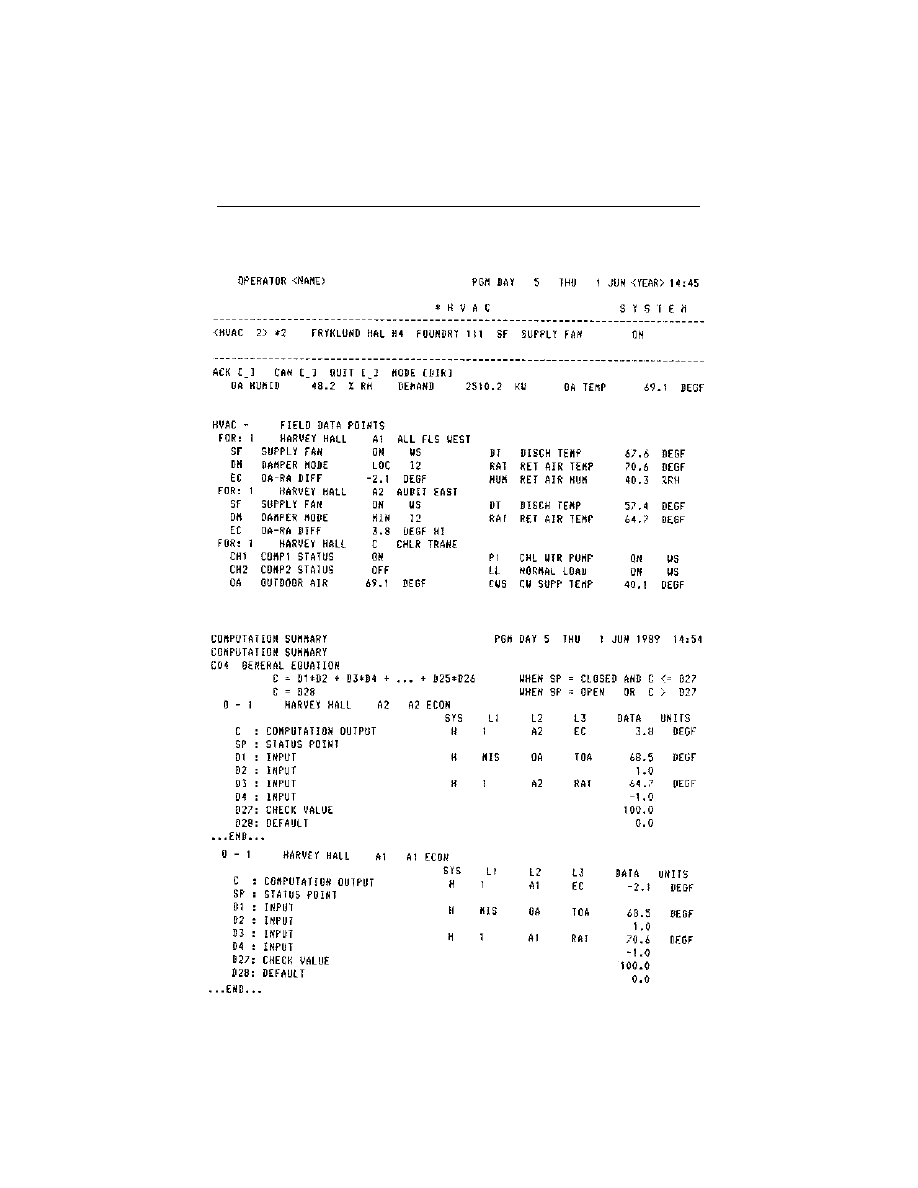
Table 7-1. OA-RA Economizer
©2002 by The Fairmont Press

equipment or other humidity sensitive devices during building unoccu-
pied periods. During unoccupied periods, the outside air dampers re-
main closed. During building occupied cycles, the outside air, return
and relief dampers are under local loop control.
(Application notes.) This program operates in conjunction with
scheduled start/stop and optimum start/stop programs prior to build-
ing occupancy.
Hot Deck/Cold Deck Temperature Reset
The hot deck/cold deck temperature reset program can be applied
to dual duct systems and multizone HVAC systems. These systems uti-
lize a parallel arrangement of heating and cooling surfaces, commonly
referred to as hot and cold decks, for providing heating and cooling
capabilities simultaneously. The hot and cold air streams are combined
in mailing boxes or plenums to satisfy the individual space temperature
requirements. In the absence of optimization controls, these systems mix
the two air streams to produce the desired temperature. While the space
temperature may be acceptable, a greater difference between the tem-
perature of the hot and cold decks results in inefficient system operation.
This program selects the areas with the greater heating and cooling re-
quirements, and establishes the minimum hot and cold deck tempera-
ture differentials which will meet the requirements, thus maximizing
system efficiency. Space temperature sensors and mixing box or plenum
damper positions are used to determine the minimum and maximum
deck temperatures necessary to satisfy the space temperature require-
ments during the building occupied period. Where humidity control is
required, the program will prevent the cooling coil from further upward
cooling coil control.
(Application notes.) This program operates in conjunction with
the chilled water reset program.
Reheat Coil Reset
Terminal reheat systems operate with a constant cold deck dis-
charge temperature. Air supplied at temperatures below the individual
space temperature requirements is elevated in temperature by reheat
coils in response to signals from an individual space thermostat. The re-
heat coil reset program selects the reheat coil with the lowest discharge
temperature or the reheat coil valve nearest closed (the zone with the least
amount of reheat required) and resets the cold deck discharge tempera-
©2002 by The Fairmont Press

ture upward until it equals the discharge temperature of the reheat coil
with the lowest demand. Where humidity control is required, the pro-
gram will prevent the cooling coil discharge temperature from being set
upward. For air conditioning systems, where reheat coils are not used, the
program will reset the cold deck discharge temperature upward until the
space with the greatest cooling requirement is just satisfied.
(Application notes.) This program operates in conjunction with
the chilled water reset program.
Steam Boiler Optimization
The steam boiler optimization program can be implemented in
heating plants with multiple boilers. Optimization of boiler plants can
be accomplished through the selection of the most efficient boiler to
satisfy the heating load. Boiler operating data must be obtained from the
manufacturer, or developed by monitoring fuel input as a function of
the steam output. Determination of boiler efficiency also takes into ac-
count the heat content of the condensate return and make-up water.
Based on the efficiency curves, fuel input vs. steam output, the boilers
with the highest efficiency can be selected to satisfy the heating load.
Boilers may be started manually by a boiler operator or automatically by
EMS depending on site requirements. Burner operating efficiency can be
monitored by measuring the O
2
or CO
2
in each boiler flue.
(Application notes.) The software inputs described may not be
required in every case. The designer must study the existing or new
system to determine which of the parameters are necessary. Care must
be observed when providing automatic start/stop of boiler in lieu of
operator supervised start-ups.
Hot Water Boiler Optimization
Hot water boiler optimization can be implemented in heating
plants with multiple boilers. The techniques and considerations are the
same as discussed in the previous section on steam boiler optimization.
(Application notes.) The software inputs described may not be
required in every case. The designer must study the existing or new
system to determine which of the parameters are necessary. Care must
be observed when providing automatic start/stop of boiler in lieu of
operator supervised startups.
Hot Water OA Reset
Hot water heating systems, whether the hot water is supplied by
©2002 by The Fairmont Press

a boiler or a converter, are generally designed to supply hot water at a
fixed temperature. Depending on the system design, the hot water sup-
ply temperature can be reduced, as the heating requirements for the
facility decrease. A reduction in hot water supply temperature results in
reduction of heat loss from equipment and piping. To implement this
program, the temperature controller for the hot water supply is reset as
a function of outside air temperature.
(Application notes.) A dedicated local loop controller may be
implemented.
Chiller Optimization
The chiller optimization program can be implemented in chilled
water plants with multiple chillers. Based on chiller operating data and
the energy input requirements obtained from the manufacturer for each
chiller, the program will select the chiller or chillers required to meet the
load with the minimum energy consumption. The program must follow
the manufacturer’s start-up and shutdown sequence requirements. In-
terlocks between chilled water pumps, condenser water pumps, and
chiller must be in accordance with the chiller manufacturer require-
ments.
(Application notes.) The software inputs described may not be
required in every case. The designer must study the existing or new
system to determine which of the parameters are necessary. Care must
be observed when providing automatic start/stop of chillers in lieu of
operator supervised startups.
Chiller Water Temperature Reset
The energy required to produce chilled water in a reciprocating or
centrifugal refrigeration machine is a function of the chilled water leav-
ing temperature. The refrigerant suction temperature is also a direct
function of the leaving water temperature; the higher the suction tem-
perature, the lower the energy input per ton of refrigeration. Chiller
discharge water temperatures (leaving chiller) can be reset upward dur-
ing non-peak design operating hours to the maximum which will still
satisfy space cooling and dehumidification requirements. The program
resets chilled water temperature upward until the required space tem-
perature or humidity setpoints can no longer be maintained. This deter-
mination is made by monitoring positions of the chilled water valves on
various cooling systems or by monitoring space temperatures.
©2002 by The Fairmont Press

(Application notes.) The chilled water temperature reset program
will affect any system requiring chilled water.
Condenser Water Temperature Reset
The energy required to operate systems is directly related to the
temperature of the condenser water temperature entering the machine.
Conventionally, heat rejection systems are designed to produce a speci-
fied condenser water temperature such as 85
°
F at peak wet bulb tem-
peratures. In many instances, automatic controls are provided to main-
tain a specified temperature at conditions other than peak wet bulb tem-
peratures. In order to optimize the performance of refrigeration systems,
condenser water temperature can be reset downward when OA wet
bulb temperature will produce lower condenser water temperature. The
program must incorporate manufacturer requirements governing ac-
ceptable condenser water temperature range.
(Application notes.) A dedicated local loop controller may be
implemented.
Chiller Demand Limit
Centrifugal water chillers are normally factory equipped with an
adjustable control system which limits the maximum available cooling
capacity; thus, the power the machine can use. An interface between the
EMS and the chiller controls allows the EMS to reduce the maximum
available cooling capacity in several fixed steps in a demand limiting
situation, thereby reducing the electric demand without completely
shutting down the chiller. The method of accomplishing this function
varies with the manufacturer of the chiller. The chiller percent capacity
can be obtained by monitoring the chiller current input. When a chiller
is selected for demand limiting, a single step signal is transmitted, re-
ducing the chiller limit adjustment by a fixed amount. The chiller de-
mand limit adjustment can be performed by shutting out taps of trans-
formers in the control circuit or by resetting the control air pressure to
the chiller compressor vane operator. As further need arises, additional
stop signals can be transmitted until the demand limiting situation is
corrected. Extreme caution must be exercised when applying this pro-
gram, since incorrect control can cause the refrigeration machine to
operate in a surge condition, potentially causing it considerable damage.
The chiller manufacturer’s recommended minimum cooling capacity
limit must be incorporated into the program logic. In general, surges
©2002 by The Fairmont Press

occur in chillers at loads less than 20% of the rated capacity.
(Application notes.) This program is used in conjunction with the
demand limiting program and each chiller demand control step must be
assigned an equipment priority level.
Lighting Control
Time scheduled operation of lighting consists of turning on and off
lights, based on the time of day and the day of the week. Additional off
commands may be generated at regular intervals to assure that lights are
off (relay operated zoned lighting only). An alternative to this program
is to initiate only the off function and require that the lights be turned
on manually. Emergency lighting is not to be controlled by this program.
(Application notes.) The lighting control program is used in con-
junction with the scheduled start/stop program.
shows functional items as they relate to software termi-
nology.
SPECIAL APPLICATIONS
Special software programs are most commonly left to the imagina-
tion of the EMS operator after he has a complete understanding of the
operating system and necessary sensors are in place. Following are some
“non-traditional” programs that have been used which are worthy of
consideration.
Variable Speed Drives
Variable speed drives (VSD), as they relate to varying the speed of
a fan or pump motor, entered the HVAC industry around 1980. VSDs
operate on the principal of varying the frequency to a motor where the
speed is directly proportional to the frequency at which it operates. See
Fan laws, by definition show that if a motor (and related fan) speed
is reduced 50%, then the resulting power consumed is reduced 87%.
Similarly, if you desire to save 50% of the consumed power of a motor,
the speed only must be reduced 20%.
Fan Laws
1.
The volume of air delivered by a fan (CFM) varies in direct propor-
tion to the fan speed (RPM). CFM = RPM
©2002 by The Fairmont Press

Table 7-2. Functional Capabilities of Energy Management System
——————————————————————————————————————————————
Function
Terminology
——————————————————————————————————————————————
Turn off equipment when building is unoccupied according
Start/Stop Control
to a set schedule.
Restart equipment at the latest possible time before reoccupancy.
Optimal Start/Stop
Change temperature set points of thermostats when building
Temperature Setback/Setup
is unoccupied.
Use “free cooling” from outdoors when temperature is suitable.
Economizer Control
Provide more sophisticated economizer based temperature
Enthalpy Control
and humidity.
Reduce excessive heating and cooling in HVAC systems.
Supply Temperature Reset
Balance chiller operation to required loads
Chiller Optimization
Balance boiler operation to loads and control combustion air.
Boiler Optimization
Reduce peak electrical demands.
Electrical Demand Control
Turn off equipment a percentage of the time according to an
Duty Cycling
established schedule to reduce energy use.
Logging conditions, equipment run time, energy use, etc.
Monitoring/Alarm
——————————————————————————————————————————————
©2002 by The Fairmont Press
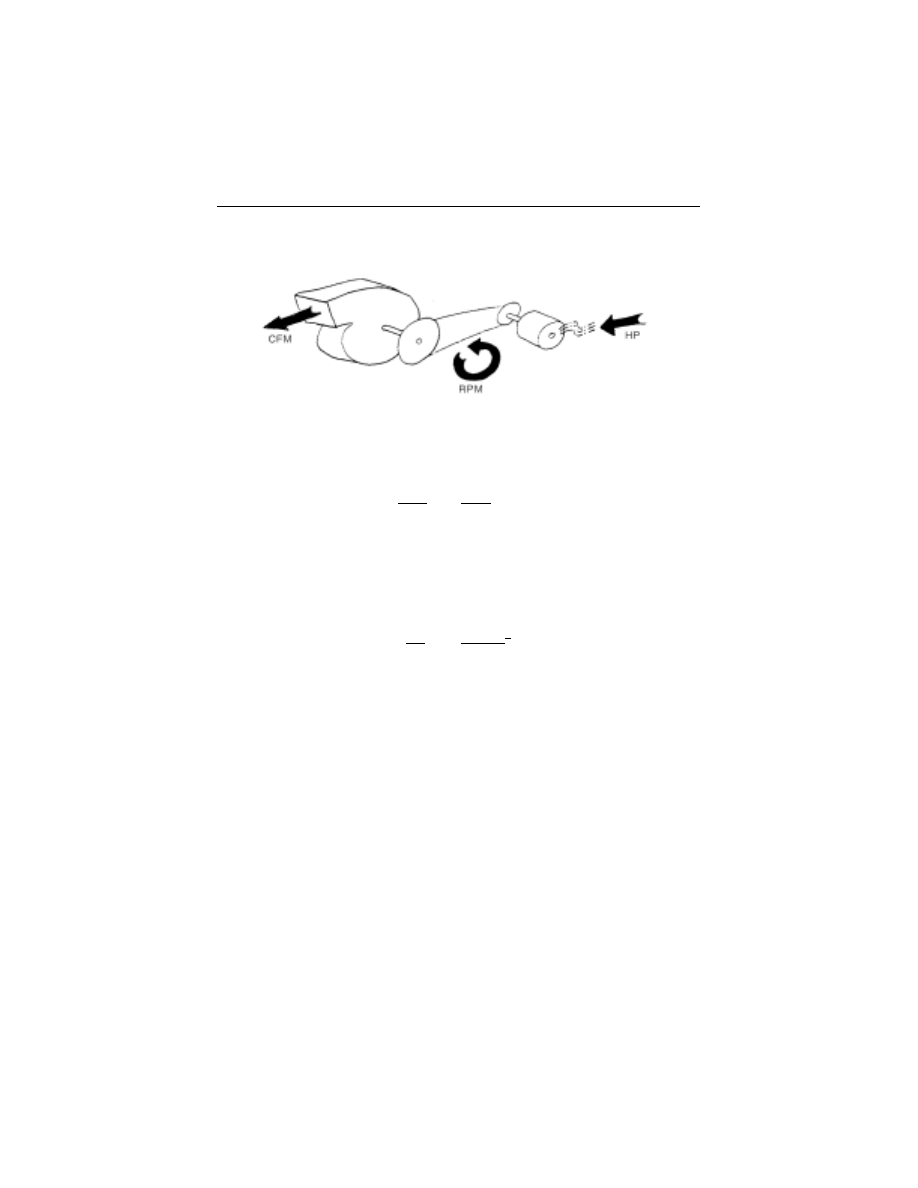
Figure 7-1. VSD and Fan Laws
1.
Volume of air delivered by a fan (CFM) varies in direct proportion to the
fan speed (RPM).
CFM
= RPM
50%
= 50%
80%
= 80%
(reduce 20%)
2.
Power required (HP) varies as the cube of the fan speed (RPM).
HP
= (RPM)
3
13%
= (50%)
3
(of the power)
51%
= (80%)
3
(reduce 20%)
Speed
Speed
Volume of Air
Power Required
Power
Reduction
(RPM)
(CFM)
(HP)
Reduction
———————————————————————————————
0%
100%
100%
100%
0%
10%
90%
90%
73%
27%
20%
80%
80%
51%
49%
30%
70%
70%
34%
66%
40%
60%
60%
22%
78%
50%
50%
50%
13%
87%
———————————————————————————————
©2002 by The Fairmont Press

2.
The power required to drive a fan motor (HP) varies as the cube
of the fan speed (RPM). HP = (RPM)
3
VSDs, when applied to fan systems, can be utilized with the duty
cycling or demand limiting software features by receiving a 20% or 50%
speed signal from the EMS, thus reducing power consumption by 50%
or 87% respectively. This avoids the need to cycle the fan OFF.
When fans are cycled OFF-ON, there is premature wear and tear
on the mechanical equipment. Belts and pulleys wear out sooner;
starter/contactors receive excessive wear; and automatic valves and
dampers cycle excessively. There is also a complete disruption of air
movement in occupied spaces which causes a distraction each time it
occurs and may even violate code requirements for specified ventilation
rates inside occupied areas.
Outside Air Dampers
Time-of-day/outside air (OA) dampers relates to the ventilation
and recirculation software program. Many ventilation codes allow for
OA dampers to remain closed until one hour after occupancy and can be
closed one hour before unoccupancy. This can result in a savings of not
cooling warm OA during the cooling season and not heating cold OA
during the heating season for two hours per day throughout the year.
Although the HVAC fan system(s) would be recirculating air during
these time periods, there is no reason to needlessly condition OA. This
time-of-day schedule could also be applied to areas of lower-than-nor-
mal occupancy rates which might occur during a lunch hour.
How Much Outside Air?
The percent of outside air has always been a question: “are we
bringing in 15% or 50% OA?… the damper shaft and blade angle indi-
cates the OA damper is open about 50% so that must be how much OA
we are introducing to the HVAC system.” We all know that, because of
duct configurations, pressure drops through dampers, and other factors,
damper position does not guarantee an equivalent % of air flow.
By use of an EMS however, with OA, return air, and mixed air
sensors in place, a software program can be written to tell you exactly
how much OA is being drawn into an HVAC system. The formula to
enter into software is:
% OA = RA ± MA
RA ± OA
(or)
MA ± RA
OA ± RA
©2002 by The Fairmont Press

If OA temp: = 60
°
F and RA temp. = 80
°
F and MA temp. = 63
°
F
then:
80
°
± 63
°
80
°
± 60
°
= 85% OA
Location of the OA and RA sensors are rather standard and the
temperature changes very slowly at these sensors. There should be no
air stratification problems. Mixed air sensor, however, must have a 8 foot
(minimum) averaging element mounted inside the mixed air chamber in
a serpentine manner to cover as much of the chamber volume as pos-
sible. The mixed air sensor is the most critical of the three elements
because of the constantly changing temperature and the problem of
stratified air.
Unoccupied Night Purge
During the summer cooling season it is not unusual for the out-
door air temperature to drop considerably at night. Frequently, during
the early morning hours prior to building occupancy time, the outdoor
air temperature is below building space temperatures. This cool outdoor
air can be utilized to cool the building, thereby eliminating the need for
mechanical cooling during early morning occupancy hours. This free
cooling will generate energy savings and also save wear on the mechani-
cal cooling equipment.
At a preprogrammed time in the early morning hours, the program
begins to monitor space and outdoor temperature and humidity. If space
conditions indicate a need for cooling, and if outdoor air conditions are
suitable, the night purge program is initiated. The program starts the
HVAC supply fan and associated exhaust fan, and opens the outdoor air
damper 100%. Warm air from the building continues to be purged until
the space temperature and relative humidity indoors reach the same
levels as the outdoor air conditions, or until the morning start-up pro-
gram basis. The outdoor air temperature must be above a preselected
minimum to ensure that the program is operable only during the cool-
ing season.
The night purge program can be applied to most HVAC systems
that are capable of using 100% outdoor air. Some package-type HVAC
units and rooftop units are limited mechanically to admit 10 or 20%
outdoor air, and therefore, do not qualify.
©2002 by The Fairmont Press

C
OMMUNICATION
P
ROTOCOL
79
Chapter 8
Communication Protocol
PROTOCOL DEFINED
rotocol is the name given to the hardware and software rules
and procedures for making sure that any transmission errors
are detected. It can also be described as a set of conventions
between communicating processors governing the format and content of
messages to be exchanged. Protocols can be proprietary, open or stan-
dard.
Proprietary
A protocol developed by a company for the exclusive use of that
company’s customers. Most current building control, fire alarm, and
security protocols are proprietary.
Open
An open protocol is one which is in the public domain, and users
are provided information and documentation necessary for its imple-
mentation. As an example, Xerox made Ethernet and open protocol, as
did International Business Machines with its GPAX D protocol. How-
ever, it is possible to end up with too many “open protocols” and a loss
of control over them.
Standard
An open protocol adopted and endorsed by a voluntary standards
organization, or government agency. Such a standard protocol may in-
clude certification. IEEE based its 802.4 Standard on the Ethernet proto-
P
©2002 by The Fairmont Press

col. It may take too long for vendors to agree on a single standard, there-
fore, more than one standard will be needed.
Protocol discussion issues might include:
•
What are the major benefits of having open or standard protocols
for end users, consulting engineers, system managers and ven-
dors?
•
What should be the scope of such an open protocol? Should it be
limited to HVAC systems? Or, should it include other systems such
as lighting and security? Or, should the protocol be limited to new
systems only?
•
How best can standards on protocols be developed and main-
tained?
Almost all commercially available EMSs use a proprietary commu-
nication protocol, therefore it is not possible to mix products made by
different manufacturers to form an integrated EMS. A building owner
may have a DDC-EMS made by vendor “V”; a chiller with microproces-
sor by vendor “W”; air handling units with integrated sensors and con-
trols by vendor “X”; room sensors controlling terminal units by vendor
“Y” and a microprocessor-based fire alarm system by vendor “Z”. All
five building system components will probably function satisfactorily
alone, as stand-alone systems, however they will not have the capability
to communicate electronically with each other.
GUIDELINES
Microprocessor-based components are available from many manu-
facturers including EMSs and unitary control products. However, since
each separate vendor has their own ideas of how to configure their
equipment into a communications architecture, the result has been an
equal number of different communications protocols.
Early on, manufacturers had very little concern for this potential
problem. However as pressure from the building owners community
increased to focus-on and solve this problem, some manufacturers are
beginning to standardize. Certain aspects of their products, such as the
©2002 by The Fairmont Press

4-20 mA input signal, can be used by all EMS manufacturers.
In January 1987, ASHRAE formed a committee to deliberate the
creation of a communications protocol that might become an industry
standard. The scope of the committee is to “provide a comprehensive set
of messages for conveying binary, analog, and alphanumeric data be-
tween devices.” Each basic message type will also require the capacity
of supplying ancillary information such as reliability, priority, real-time
and other related data. This scope will also provide for the format of
each data element.
Several protocol guidelines currently developed include the Open
System Interconnection (OSI) by the International Standards Organiza-
tion (ISO); the Public Host Protocol (PHP) and the Public Unitary Pro-
tocol (PUP) both by American Auto-Matrix. Two companies have devel-
oped and implemented protocols. Manufacturing Automation Protocol
(MAP) and Technical and Office Protocol (TOP) both by General Motors;
and IBM’s Facilities Automation Communication Network (FACN) Pro-
tocol running a program called General Purpose Automation Executive-
Distributive (GPAX-D). These protocols all attempt to allow interaction
between multi-vendor systems.
A formal hierarchical identification of all data communications
network functions has been established by the International Standards
Organization (ISO) and referred to as the ISO Model for Open Systems
Interconnection (OSI). This model, shown in
identifies seven
distinct levels of functional requirements pertaining to data communica-
tions network.
Realization of the ideal LAN would require all levels of functions
included in the OSI standard; however, not all levels of the OSI standard
need to be implemented to provide effective communications in an
LAN. If only the lower levels of the standard exist, a LAN can usefully
support the multiple applications. In essence, the transmission media
and lower level interfaces are common so that data can be exchanged
within virtual subnetworks: However, a device in one subnetwork can-
not communicate intelligently with a device in another subnetwork
because each application is using unique higher level implementations.
This LAN would allow messages to be exchanged between these dis-
similar terminals, but the message would not be understood. Neverthe-
less, the backbone LAN permits flexible location and relocation of the
various attached equipment.
©2002 by The Fairmont Press
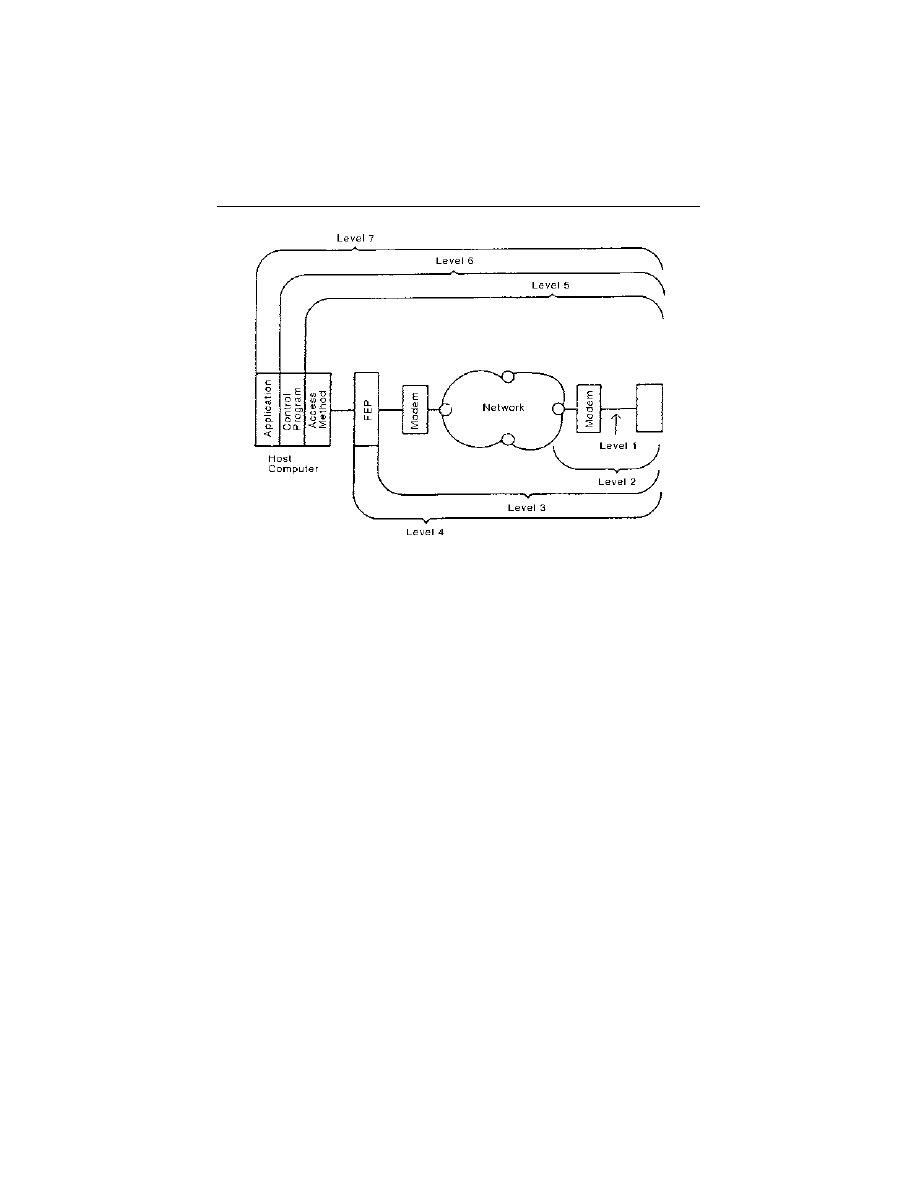
DEVELOPING STANDARD TECHNIQUES
While standards associations don’t dwell on this fact, an over-
whelming number of standards that apply in the computer industry
trace their origin to the work of individuals (or individual firms) in the
industry rather than standards associations. Standards as basic as the
OSI seven-layer communications standard were developed by individu-
als working in the industry and became official standards only after they
had already been adopted as defacto standards.
certain manufacturers are utilizing
Figure 8-1. Open Systems Interconnection (OSI) Model
International standards are being developed which are defined by various levels.
X.25 has been approved through level 3.
Level 1 — Physical (X.21)
Level 2 — Data Link
Level 3 — Network
Level 4 — Transport
Level 5 — Session
Level 6 — Presentation
Level 7 — Application
©2002 by The Fairmont Press
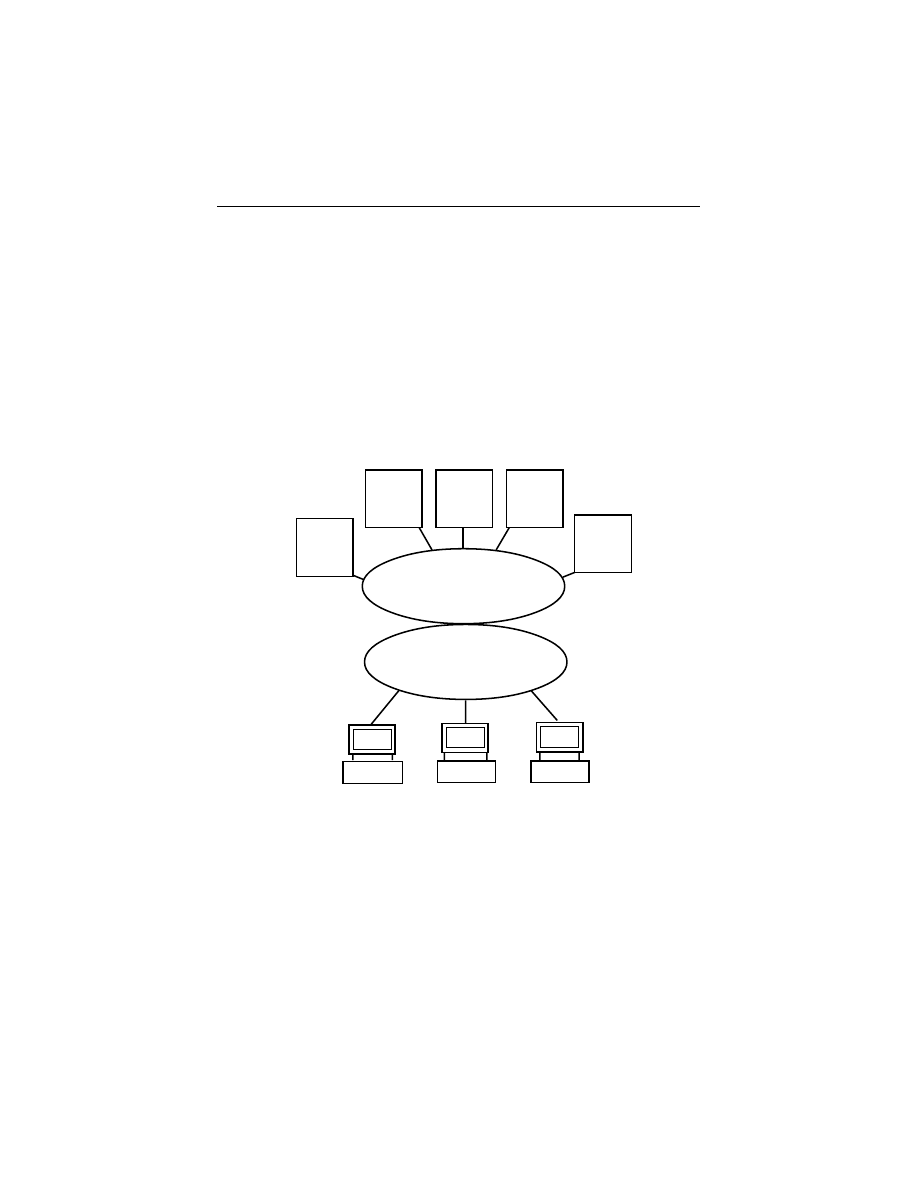
communication schemes developed in the data communication world.
Another example of this is shown in Figure 8-2 where five separate
manufacturers, each involved with a different building product are in-
tegrated into one “unique system.” This may appear to be an open pro-
tocol however it is actually a proprietary protocol shared only by these
five manufacturers.
ASHRAE’s Standards Committee has been hard at work deliberat-
ing the creation of a communication protocol that might, some day,
become a standard throughout the EMS industry. Refer to four articles
at the end of this
Figure 8-2. Robertshaw’s Facility Integrator
•
Uses computer technology to integrate formerly separate functions of complementary
products into one unique system
•
Uses a common, easy to learn, mouse-driven graphical interface built around IBM’s
Presentation Manager software.
• Displays multi-window, real-time applications for different systems at the same time.
• Supports multiple users through PS/2* workstations over the token-ring network.
SCHLAGE
SECURITY
PYROTRONICS
FIRE
PROTECTION
ROBERTSHAW
HVAC
CONTROL
GE
LIGHTING
ANEMOSTAT
FUME
HOOD
IBM
TOKEN
RING
LAN
IBM
WORKSTATION
IBM
WORKSTATION
IBM
WORKSTATION
Five Presenters
©2002 by The Fairmont Press
1. Energy User News, 2 pages, January 1987
2. Energy User News, 2 pages, July 1988
3. ASHRAE Journal, 8 pages, January 1989
In 1991, ASHRAE Standards Project Committee SPC 135P (the “P”
is for “proposed”) came up with a name chosen for this standard pro-
tocol: “BACnet—A Data Communications Protocol for Building Auto-
mation and Control Networks. “BACnet could have a positive impact in
running a BAS efficiently such as:
•
It will provide “gateways to let new systems into the fold.” So,
rather than presenting a handicap to owners of existing systems,
BACnet will increase the potential of their systems.
•
It will help relieve the burden on users with respect to having to
deal with different programming languages.
•
It will provide for common operator interfaces by allowing “the
sharing of information between panels of different manufacturers.”
•
It will aid owners of DDC systems by allowing the sharing, on
screen, of information from the panels of different manufacturers.
•
It will help establish a truly competitive bidding process in the
EMS market. In other words, you, as a present owner of one
manufacturer’s system will not be “stuck” with that manufacturer
at upgrade time.
One approach to BACnet compliance is the use of gateway technol-
ogy, which according to some, is economical and provides minimal risk
to vendors and users. A gateway is a computer that connects two differ-
ent communications networks together. The gateway will perform the
protocol conversions necessary to go from one network to the other. A
bridge, by contrast, is a device that connects two networks of the some
type together.
Some BAS companies have used the term Integrator to describe
their connectivity to qualified third-party controllers.
©2002 by The Fairmont Press
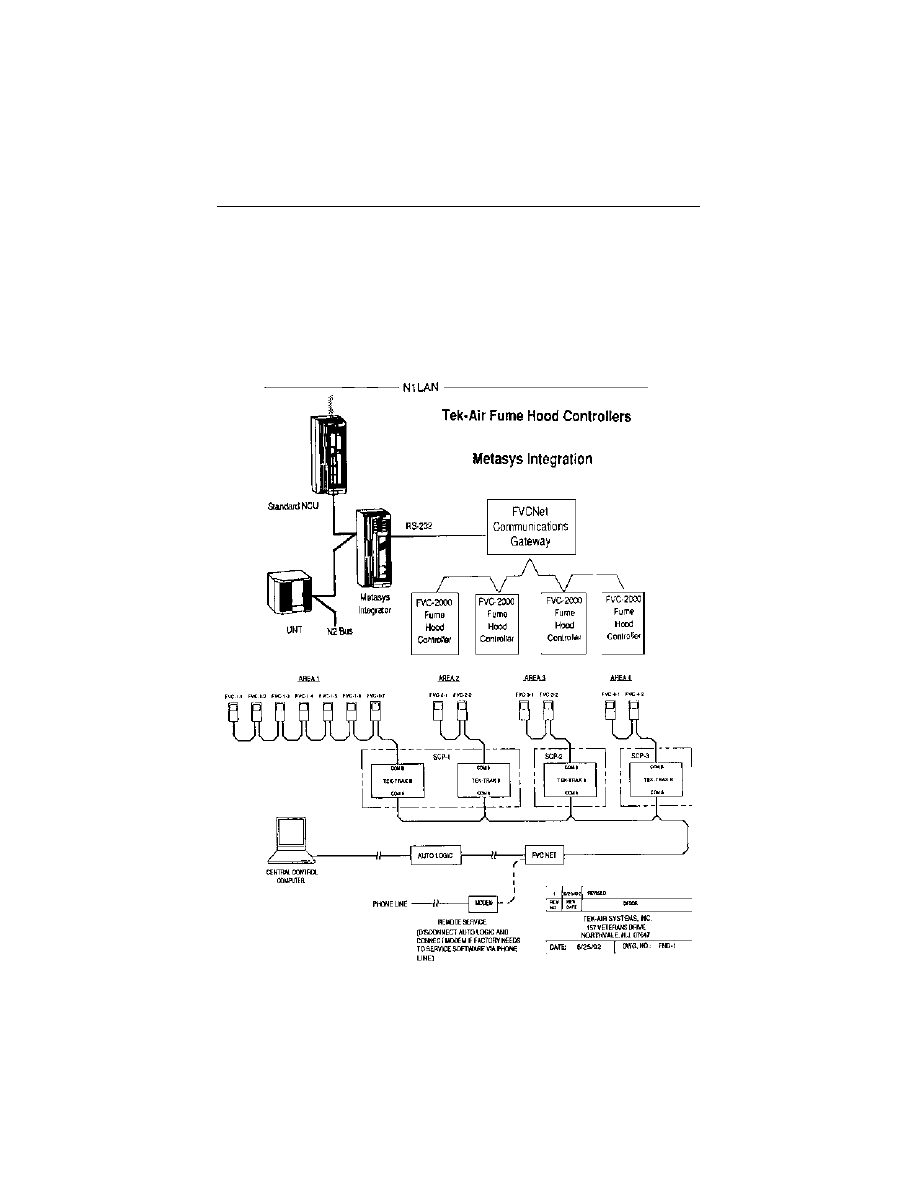
In general, a EMS vendor’s Integrator panel contains the necessary
protocol conversions to connect to chillers, boilers, refrigeration units,
electric switchgear, AC drives, fume hoods, and control equipment from
other manufacturers. See Figure 8-3.
The cost of these panels can range from $5,000 to $8,000 each and
so the benefits obtained (monitoring as well as control) must be carefully
examined.
Figure 8-3. Gateway/Integration
©2002 by The Fairmont Press
From Energy User News—January 26, 1987
—————————————————————————————
ASHRAE Forms Group to Seek Standard EMS
Protocol
By Vito Racanelli
N
EW
Y
ORK
—The Standards Committee of The American Society of Heating,
Refrigerating and Air Conditioning Engineers (Ashrae) approved the for-
mation of a special project committee aimed at defining a standard com-
munications protocol for energy management systems, Energy User News
Has learned.
The group’s decision, reached on the opening day of its Winter
Meeting here, was announced at an EUN panel discussion last Monday by
H. Michael Newman, vice chairman of the Technical Committee on Con-
trol Theory and Application (TC 1.4), which requested the formation of the
special project committee.
Newman, manager of facilities engineering at Cornell University,
Ithaca, N.Y., and EUN’s institutional energy manager of 1986, has been
nominated for the position of chairman of the new committee.
A standard protocol, if incorporated by manufacturers into their
EMS systems, would allow users who are configuring multiple EMS instal-
lations to link equipment from different vendors, and would facilitate
shared monitoring and control between different vendors’ EMS.
This, in turn, will allow users greater freedom in specifying equip-
ment, and offer more options in a competitive bid situation, according to
Newman. Users would not be locked into buying one vendor’s equipment,
he added.
The time frame in which an Ashrae standards committee can arrive
at a standard EMS protocol is uncertain, hinging on wide vendor coopera-
tion, Newman, said. “The time it will take to define a standard depends on
how soon and how intensely the various vendors get involved. If they
decide to play ball, it could take six months to a year. If their cooperation
is less than complete, it could take forever,” he continued.
He added, however, that the vendors seem to support the idea of a
©2002 by The Fairmont Press
standard protocol, and that he was “fairly optimistic” about the timely es-
tablishment of a standard.
At EUN’s panel discussion on EMS standardization last Monday,
Newman said that a standard could probably be developed in one to three
years. Other panelists from such EMS vendors as Honeywell Inc., Minne-
apolis; Johnson Controls Inc., Milwaukee; MCC Powers, Northbrook, Ill.;
Novar Controls Corp., Barberton, Ohio; and The Trane Co., LaCrosse,
Wisc., said that their respective companies would support Ashrae’s efforts
to define a standard communications protocol. A transcript of the panel
discussion will appear in the March edition of Energy User News Maga-
zine.
EUN reported last year that EMS manufacturers such as Honeywell,
Johnson and MCC Powers were generally skeptical of current software ap-
proaches to linking disparate EMS systems to a single host computer, cit-
ing what they considered a limit to the amount of control functions that
could be shared by systems linked to a host by software (see Feb. 24, 1986
EUN, page 1, and March 3, 1986 EUN, page 9). Terry Weaver, vice presi-
dent of the Electronic Systems and Services Division of Johnson Controls,
said at that time that forming a standardization committee within the in-
dustry would be the most positive step toward a standardization of EMS
protocols.
The committee’s purpose is specifically to define the content and for-
mat of messages communicated between computer equipment used for the
digital monitoring and control of building HVAC systems.
Newman’s nomination as chairman of the new committee is subject
to approval by the Ashrae Standards Committee, which will convene in
three months.
No one has been named to the new committee, according to
Newman. However, he added that the committee will be made up of 5 to
13 members from EMS manufacturers, the National Board of Standards,
the National Research Council of Canada, Ottowa, and users.
The committee will then prepare the technical content of the stan-
dard and make it available for public review.
Users interested in participating in the committee should contact H.
Michael Newman, Ashrae Standard Project Committee, 135 P, 1791 Tullie
Circle, NE, Atlanta, GA 30029.
©2002 by The Fairmont Press
From Energy User News—July 11, 1988
——————————————————————————————
Ashrae Protocol Group Adopts Message Syntax
By Richard Mullin
O
TTAWA
, O
NTARIO
—Ashrae’s standards committee studying the develop-
ment of a communications protocol for building controls systems agreed at
its meeting last month to adopt a message syntax that will be used in its
final protocol, according to Michael Newman, chairman of the committee.
The committee held its third full meeting during Ashrae’s summer
convention here. Newman and others in attendance said the event was
characterized by a greater spirit of cooperativeness among the various
controls firms than has been evident at previous meetings. “We’re out of
the political issues and into the technical issues,” Newman said.
The Abstract Sylitax Notation (ASN.1) adopted by the committee is
an International Organization of Standards (ISO) syntax notating the com-
ponents of messages that will be conveyed by the protocol. It essentially
establishes a language. The committee’s Primitive Data work group will,
using ASN.1, begin work on encoding data for the protocol, which will
establish the type of data to be transmitted, according to Lawrence
Gelburd, director of firmware engineering for American Auto-Matrix, Ex-
port, Pa., and head of the committee’s object type and properties group.
Newman, who is the manager of facilities engineering, computer sec-
tion, at Cornell University, Ithaca, N.Y., said the group is currently study-
ing various national and international communications standards, such as
the Manufacturing Automation Protocol (MAP), a seven-layer local area
network under development by General Motors and other users and sys-
tem vendors for factory automation.
Newman said the Ashrae committee’s protocol will likely emulate
Mini MAP, which includes the physical, data link and application layers of
the full MAP system—the seven layers of which are still not fully defined.
“Every industry has gone through this,” said Newman. “There are
standards for office automation, electronic fund transfer, automated tellers,
©2002 by The Fairmont Press
all of which use an ISO-OSI (open systems interface) layered architecture.
We are trying to make sure we don’t fly in the face of the other standards.”
Commenting on a shift in the committee’s emphasis, Gelburd said,
“The whole tone is more like ‘let’s get a first draft together,’ not ‘should we
get a draft together.’ Everybody has their shirt sleeves up and is cooperat-
ing. Everyone sees the handwriting on the wall.”
Joe Prokop, supervisor, advanced technologies for Johnson Controls
Inc., Milwaukee, agreed. “It’s no longer a question of whether there should
be a protocol or if Johnson should comply. It’s a given. A year ago we
wondered if the thing would fly or if it was worth the time.”
While agreeing that the committee members are cooperating more,
Gideon Shavit, chief engineer with Honeywell Inc.’s Commercial Buildings
Group, Minneapolis, raised a long-running issue of contention in an inter-
view with EUN last week—the issue of where the protocol should reside.
While many on the committee are pursuing a controller-to-controller ap-
proach, Shavit said a system-to-system method in which each
manufacturer’s components operate as autonomous “islands” may be
more cost-effective for users.
A controller-to-controller method may create a situation in which
system failures are difficult to identify, whereas a system link would corral
problems within one vendor’s patch of equipment, he said.
Extra cost with the controller-to-controller method would arise from
the need to purchase extra monitoring equipment or even establish a third-
party service entity for mixed vendor systems, said Shavit.
Newman, however, said that Shavit may be concentrating on an ap-
plication that is too specific. The committee, he said, is not focusing on
where a protocol should reside, but simply on a method of exchanging
information between any type of system link.
Prokop and Newman said the committee has not compiled statistics
on the overall number of users who feel they would benefit from a proto-
col—a major issue of contention at the time that the protocol issue emerged
(See Feb. 24, 1986 EUN, page 1).
©2002 by The Fairmont Press
From ASHRAE Journal—January 1989
——————————————————————————————
Standardizing EMCS Communication Protocols
ASHRAE SPC 135P is working to address the communication
requirements of all devices used in controlling HVAC & R
systems
By Steven T. Bushby and H. Michael Newmam
Member ASHRAE
Member ASHRAE
THE USE of distributed, microprocessor-based, energy management and
control systems (EMCSs) is now a fact of life in the building control indus-
try. Microprocessor-based components are available from many manufac-
turers and are being installed in ever-increasing numbers. Almost all com-
mercially available EMCSs use proprietary techniques to exchange infor-
mation among the distributed devices making up the control system. As a
result, in most cases, it is not possible to mix products made by different
vendors and expect them to work as an integrated system (Newman 1983).
Building owners and operators are unhappy with this situation because it
forces them to return to the same vendor whenever additions or changes
need to be made to their EMCS. Some potential customers, including the
U.S. military, have decided to delay purchasing new EMCSs until stan-
dards are in place to protect their investment.
Pressure from the building community and a request from ASHRAE
Technical Committee (TC) 1.4, Control Theory and Application, resulted in
action by the ASHRAE Standards Committee. On January 18, 1987, the
committee voted to approve the formation of a Standards Project Commit-
tee (SPC) to deliberate the creation of a communication protocol that might
become an industry standard. SPC 135P was formed and held its first meet-
ing in June 1987. Membership consists of approximately equal numbers of
vendors, users and general interest people.
What is a communication protocol?
A communication protocol is a set of rules governing the exchange of
data between two computers. In the broadest sense, a protocol encom-
©2002 by The Fairmont Press
passes both hardware and software specifications including the physical
medium; rules for controlling access to the medium, mechanisms for ad-
dressing and routing messages; procedures for error detection and recov-
ery; the specific formats for the data being exchanged; and the contents of
the messages.
The proposed standard being developed is intended to address the
communication requirements of all devices that might be used in the con-
trol of HVAC&R systems. This includes current devices as well as consid-
eration of the possible requirements of future control equipment. The SPC
will not directly address the needs of other types of building services, such
as lighting control, and fire and security, although these might be inte-
grated with HVAC control in the future. Through careful planning, the
protocol for HVAC&R control systems can be structured to permit exten-
sion by the simple addition of protocol services which are specific to the
new applications while using others which are included in the standard.
Some people have suggested that SPC 135P should address the pro-
tocol requirements for unitary controllers as a first step to accelerate the
development process and then address the requirements for higher level
controllers. Implicit in this suggestion is the assumption that it is somehow
easier to communicate with unitary controllers than other types of control-
lers, presumably due to their relatively simple functionality compared with
“general purpose” controllers. But, this is not so. Analysis shows that the
basic elements of communication between HVAC&R controllers are largely
independent of the particular devices (ASHRAE 1987). All HVAC&R con-
trollers. for example, need to exchange information about setpoints, param-
eters for tuning control loops. analog and binary inputs, and analog or
binary outputs. There is no fundamental difference between unitary con-
trollers and other types of controllers in this regard. The difference is
mainly in the number of inputs, outputs and kinds of parameters which
are involved and perhaps the frequency of information exchange. Param-
eters may vary from application to application but their format and the
protocol for their exchange need not differ from one type of device to
another.
Consequently, the consensus within the SPC is to address the com-
munication requirements of all HVAC&R control equipment. Any services
that the protocol provides which may be applicable to only certain types of
controllers can be dealt with by defining classes of operation consisting of
©2002 by The Fairmont Press
subsets of protocol services.
At the other end of the spectrum, it has been suggested that the SPC
should only address communication between “front ends” of control sys-
tems allowing proprietary communication protocols to be used at lower
levels. Controllers made by different vendors still would not be able to
communicate directly. This approach fails to simplify the problem for the
same reasons mentioned previously. In addition, such a standard would
provide the user with less flexibility in configuring a multivendor system
than a standard that addresses communication at all levels. For these rea-
sons an approach limited to a “host-to-host” protocol also has been re-
jected (ASHRAE 1987).
The OSI reference model
There is an overwhelming international trend toward writing com-
puter communication protocol standards based on an architecture called
the Open Systems Interconnection (OSI)-Basic Reference Model (ISO 1984).
This international standard is essentially a blueprint for developing multi-
vendor computer communication protocol standards. In the OSI model,
the complex problem of computer-to-computer communication has been
broken down into seven smaller, more manageable sub-problems, each of
which concerns itself with a specific communication function. In the jargon
of the OSI model, each of these sub-problems forms a “layer” in the pro-
tocol architecture.
The seven layers are arranged in a hierarchical fashion as shown in
A given layer provides services to the layers above and relies on
services provided to it by the layers below. A key to understanding layered
architectures is to think of each layer as a black box with carefully defined
interfaces on the top and bottom. The user’s application program connects
to the OSI application layer and communicates with a second, remote user
application program. This communication appears to take place between
the two applications as if they were connected directly through their ap-
plication layer interfaces. No knowledge or understanding of the other
layers is required. In a similar manner, each layer of the protocol relies on
lower layers to provide communication services and establishes a virtual
peer-to-peer communication with its companion layer on the other system.
The only real connection takes place at the physical layer.
This approach to communication protocol standards has been
©2002 by The Fairmont Press
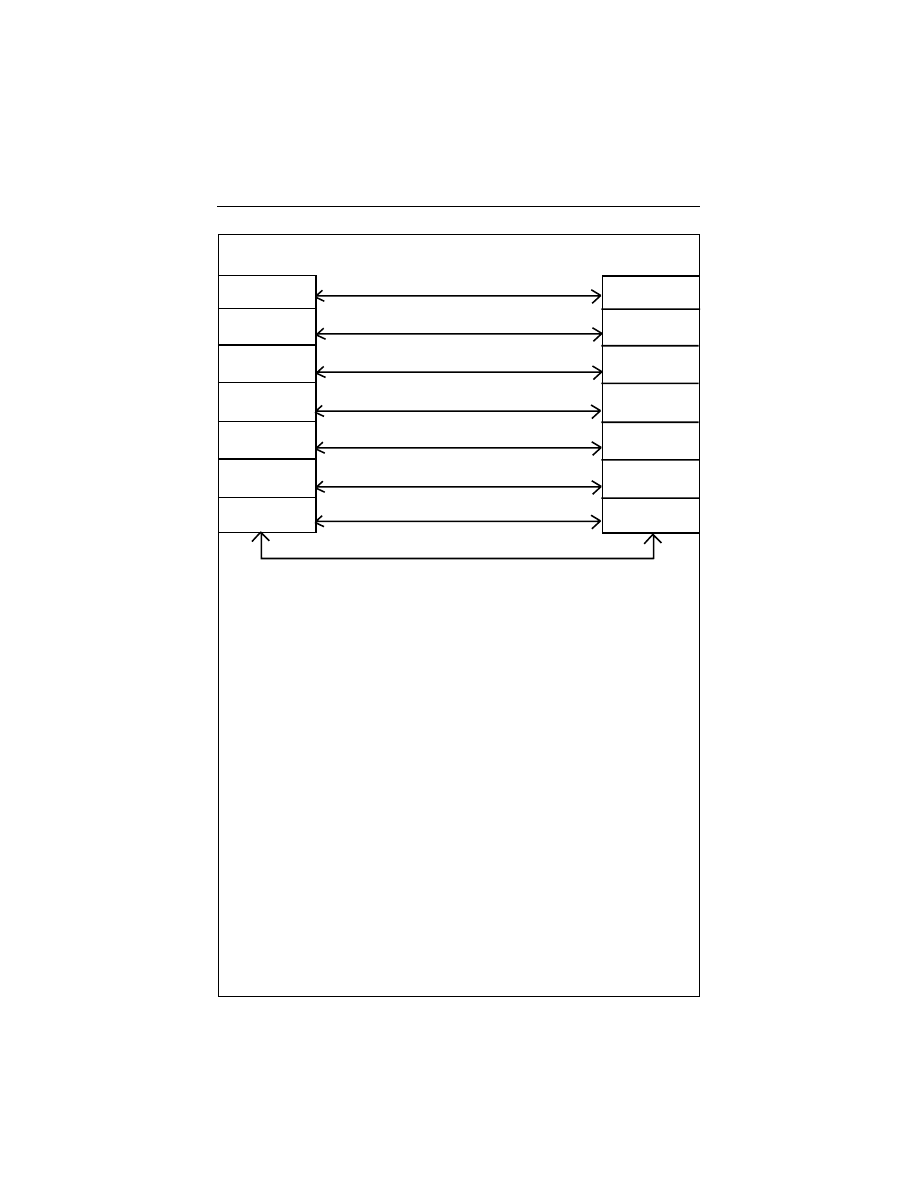
adopted by many organizations. Two well known protocols of this type are
the Manufacturing Automation Protocol (MAP) and the Technical and
Office Protocols (TOP). The U.S. government has adopted the OSI model in
its approach to Federal Information Processing Standards (FIPS) and has
released an OSI procurement policy called the Government Open Systems
Interconnection Profile (GOSIP), Other national governments have begun
to develop their own GOSIP programs. Many local area network products
are built on the lower layers of the OSI model, and many computer com-
panies are modifying their networks to become OSI compatible or to build
bridges to permit connection to OSI networks.
This movement to embrace OSI is a good reason to look at the OSI
architecture but, by itself, is not reason to adopt it for EMCS standards.
Why is there so much interest in OSI? What are the benefits? What are the
costs?
Figure 1—In the OSI model, each computer has equivalent data commu-
nication software with layered or hierarchical functionality. Each layer
communicates logically with the corresponding layer in. the other ma-
chine. A “user” is an application program with the need to communicate
with another machine.
USER 1
USER 2
Handles the actual interface with the user’s application program.
Converts codes, encrypts/decrypts, or reorganizes data.
Manages dialog, synchronizes data transfers with checkpoints.
Provides end-to-end error checking and data segmentation.
Establishes logical circuits and routing between two machines.
Controls orderly access to the physical medium.
Transmits and receives individual bits on the physical medium.
APPLICATION
PRESENTATION
SESSION
TRANSPORT
NETWORK
DATA LINK
PHYSICAL
APPLICATION
PRESENTATION
SESSION
TRANSPORT
NETWORK
DATA LINK
PHYSICAL
Physical medium between the two machines.
©2002 by The Fairmont Press
Adoption of the OSI architecture for an EMCS protocol standard
provides several potential advantages including:
•
Lower hardware cost due to economies of scale. The lower layers will
be implemented in silicon. Large quantities of chips for this purpose
will be manufactured for the computer industry, and the HVAC&R
industry can use the same chips.
•
Layered architectures permit updating the standard in a modular
fashion. Only the layer being updated needs to be changed. This is
important for a rapidly changing technology like computer control
systems. This also can reduce the cost of updating implementations to
comply with changes in the standard.
•
Integrating other types of building services becomes easier because
only application layer services need to be added.
•
Unique circumstances of a particular job—-throughput requirements,
distances involved, and the presence of sources of electromagnetic in-
terference—can be accommodated because the physical and data link
layers may be changed without affecting the higher layers.
The disadvantages of adopting the OSI approach are increased over-
head and complexity. The OSI model was designed to deal with the prob-
lems associated with large, complex networks communicating with other
networks anywhere in the world. Much of this complexity is not needed
in an EMCS. This is a serious problem but it has a simple solution. There
is precedent for including only selected layers of the OSI model in a stan-
dard. This is called a “collapsed architecture” and has been used for some
real-time control applications in other industries. One example of a col-
lapsed architecture is shown in
The approach of SPC 135P
SPC 135P has decided to follow the OSI model but is considering the
use of a collapsed architecture. Only OSI layers that provide services use-
ful in EMCS applications will be included in the proposed standard. Pre-
cisely which layers will be included is undecided.
©2002 by The Fairmont Press
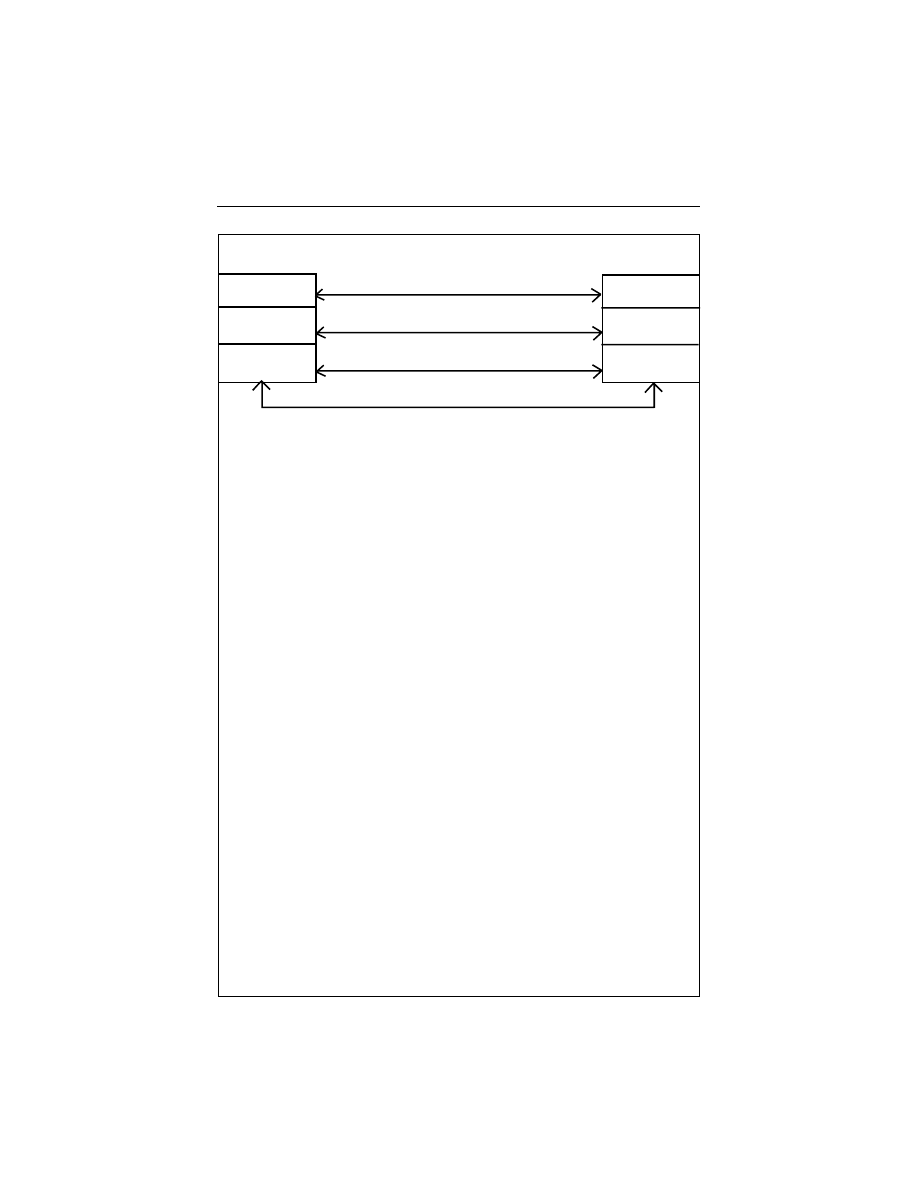
The expertise of ASHRAE is in building control, not computer com-
munication. The SPC recognizes that it would not be useful to focus on
the protocol issues that pertain to the lower layers of the OSI model. It is
the application layer that is the appropriate place to concentrate our ef-
forts and that is what is being done. It is almost certain that standards
developed by other bodies will be adopted for the lower layers, possibly
more than one in some cases, thus offering designers the possibility of
certain cost-performance tradeoffs.
Three separate working groups are currently active within the SPC:
the Application Services Working Group, the Object-Types and Properties
Working Group and the Data Encoding Working Group. The application
layer of the OSI model is where the protocol requirements that are unique
to a particular application (e.g., HVAC&R control, lighting, security, fire
and smoke control) reside. Lower layers provide services that are pre-
sumed to be required for all applications. The Application Services Work-
ing Group is addressing the issue of which functions or services need to
be provided by the application layer to meet the needs of an EMCS
(Bushby 1988). A list of these services has been developed and the group
is in the process of formalizing a description of each service, how it will
work and how it might interact with other services.
The Object-Types and Properties Working Group is addressing the
issue of accessing information through the use of name referencing. The
APPLICATION
DATA LINK
PHYSICAL
USER 1
USER 2
Handles the actual interface with the user’s application program.
Converts codes, encrypts/decrypts, or reorganizes data.
Transmits and receives individual bits on the physical medium.
APPLICATION
DATA LINK
PHYSICAL
Physical medium between the two machines.
Figure 2
—In a “collapsed” architecture, one or more layers of the seven-
layer model are omitted. Any missing functionality, if it is required, must
be built into the user programs. This three-layer model is the basis for the
“Enhanced Performance Architecture” subset of the Manufacturing Au-
tomation Protocol known as Mini-MAP.
©2002 by The Fairmont Press
idea is to eliminate the need for knowledge of hardware configuration
when requesting information. A name can be used to request a desired
piece of information, eliminating the need to specify a particular hardware
pin location or a memory address. Requesting a chilled water setpoint
temperature, for example, will not require any knowledge of how that
information is stored in the controller. In fact, any controller can be repre-
sented as a set of objects, each of which maps in a standardized way to the
actual hardware and software
There is a close relationship between standardized object-types and
the application services needed in the protocol. If object-types are con-
structed carefully, a small number of application services which provide an
ability to read or change the properties of objects can provide many of the
application needs of an EMCS. For example, requesting the current value
of a particular property of an object would be done in the same way
whether the property represented a sensor reading, a program parameter
or a schedule. Reducing the number of application services required can
simplify the protocol and make it easier to implement.
The Data Encoding Working Group is developing a way to represent
the information content of the communication in digital form. This process
involves encoding application service requests and their associated param-
eters and deciding data formats for representing the properties of objects.
One part of this activity amounts to deciding how to represent fundamen-
tal types of data such as integers, real numbers and Boolean values. As
with other aspects of the protocol development, one important consider-
ation is efficiency, i.e., compactness of representation.
A comprehensive approach to the needs of the HVAC&R industry is
being taken by SPC 135P to ensure that the resulting standard will stand
the test of time in this rapidly changing field. The ASHRAE standard could
become the basis for communication protocols that meet the requirements
of integrated services embodied in the concept of intelligent buildings.
References
ASHRAE 1987. “Minutes of SPC 135P Application Services Working
Group. December 10, 1987,” SPC 135P AS-OO3.
Bushby, ST 1988 “Application L&M Communication Protocols for Building
Energy Management and Control Systems.” ASHRAE Transactions, Vol. 94,
©2002 by The Fairmont Press
Pt. 2, Paper No. 3174.
ISO, 1984, ISO Standard 7498, “Information Processing Systems—Open
Systems Interconnection—Basic Reference Model.” International Organi-
zation for Standardization. Available from ANSI, 1400 Broadway, New
York, New York 10018.
ISO. 1987. ISO DIS 9506. “Manufacturing Message Specification—Part 1:
Service Definition,” International Organization for Standardization. Avail-
able from ANSI, 1400 Broadway, New York, New York 10018.
Newman, H.M., 1988. “Data Communications in Energy Management
and Control Systems: Issues Affecting Standardization.” ASHRAE Trans-
actions, Vol. 89, Pt. 1, Paper DC-83-5 No. 3.
About the authors
Steven T. Bushby is an engineer in the mechanical systems and con-
trols group, building environment division, Center for Building Technol-
ogy, National Institute of Standards and Technology, Gaithersburg, Mary-
land. He received a bachelor’s degree in chemical engineering from
Northwestern University and a master’s degree in chemical engineering
from Colorado State University.
H. Michael Newman is manager of the facilities engineering com-
puter section. Cornell University, Ithaca, New York, which oversees the
university’s extensive multi-vendor EMCS. He received his bachelor’s
and master’s degrees in engineering physics from Cornell and did post-
graduate work in astrophysics in the NASA Center for Radiophysics and
Space Research.
©2002 by The Fairmont Press

O
PERATOR
/M
ACHINE
I
NTERFACE
99
Chapter 9
Operator/Machine
Interface
or direct access to an EMS, the operator’s station usually consists
of a personal computer with a monochrome or color monitor
(CRT), keypad, and printer. This combination of equipment
would be considered the primary input/output device (I/O) or Opera-
tor Workstation.
Most all vendors have standardized on use of an IBM Personal
System 2 (IBM-PS/2) Model 60 or 80 computer, as well as a number of
similar computers operating MS-DOS. Regardless if the user elects to
purchase a color graphics package (described herein), for the small cost
difference, the color monitor is recommended over the monochrome
unit. A software supported optical mouse should also be supplied.
Since EMSs can be monitored from a remote terminal, modems
should be installed. A Hayes Smartmodem 1200 or equivalent is recom-
mended.
IBM-PS/2 Model 80 computers have more than sufficient memory
to hold the EMS operating system, color graphics program, maintenance
management programs, and reports storage. Plus, they can be used for
inventory control, graphing, general typing and a host of other uses.
The color CRT could be furnished with a color graphics package,
however, this feature is optional and in most instances is an expensive
option. Vendors tend to lean very heavily on this feature, with many
colorful brochures showing all the various arrangements available.
F
©2002 by The Fairmont Press

GRAPHICS
Color graphics provides the user with EMS point information dis-
played on customized dynamic color graphics. Use of static graphics or
35 mm slides is not recommended. The system, upon command, will
display the current measured variables associated with the equipment
or area. Off-normal conditions and alarms will be displayed instantly.
Alphanumeric data would be a standard feature as well as the associ-
ated keyboard including all standard ASCII characters.
for typical graphic displays.
The printer should be an 80-column hard copy type interface that
supports full graphic features and is rated at no less than 100 cps. Stan-
dard form fold paper with tractor feed would be required. IBM
Proprinter II or equal should be considered.
DATA UTILIZATION
User friendly is a phrase sometimes misused and often does not
mean what it implies. The real test of being user friendly is the time and
effort required to understand and utilize the full capabilities of a system
without being a computer genius or being constantly dependent on so-
called “outside experts.”
In seconds you should be able to change or delete a point, revise
a schedule or create and display a color graphic on the operator’s con-
sole. It should be versatile, user programmable, and be operated by
simple English language.
PACKAGING
With most systems you can oversee your entire operation from a
central location regardless of whether you manage a single building or
multiple buildings. By creating this central operators station, you can
supervise regular and emergency maintenance, monitor intrusion and
fire alarm, control temperature, generate financial an operational data
and much more.
Many EMSs do not, by definition, require a PC connected to it to
operate. This would be considered a stand-alone system. The EMS
©2002 by The Fairmont Press
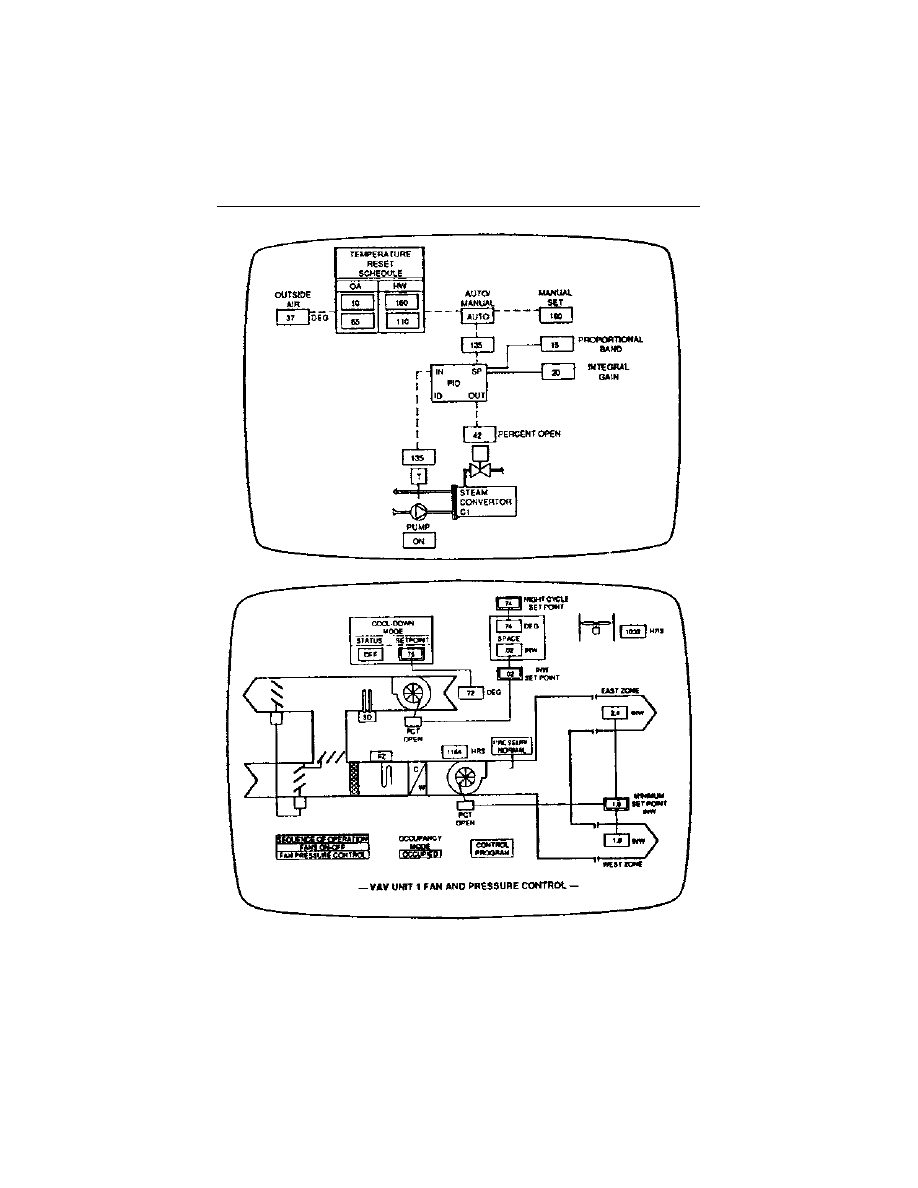
9-1. Graphic Displays
(Continued)
©2002 by The Fairmont Press
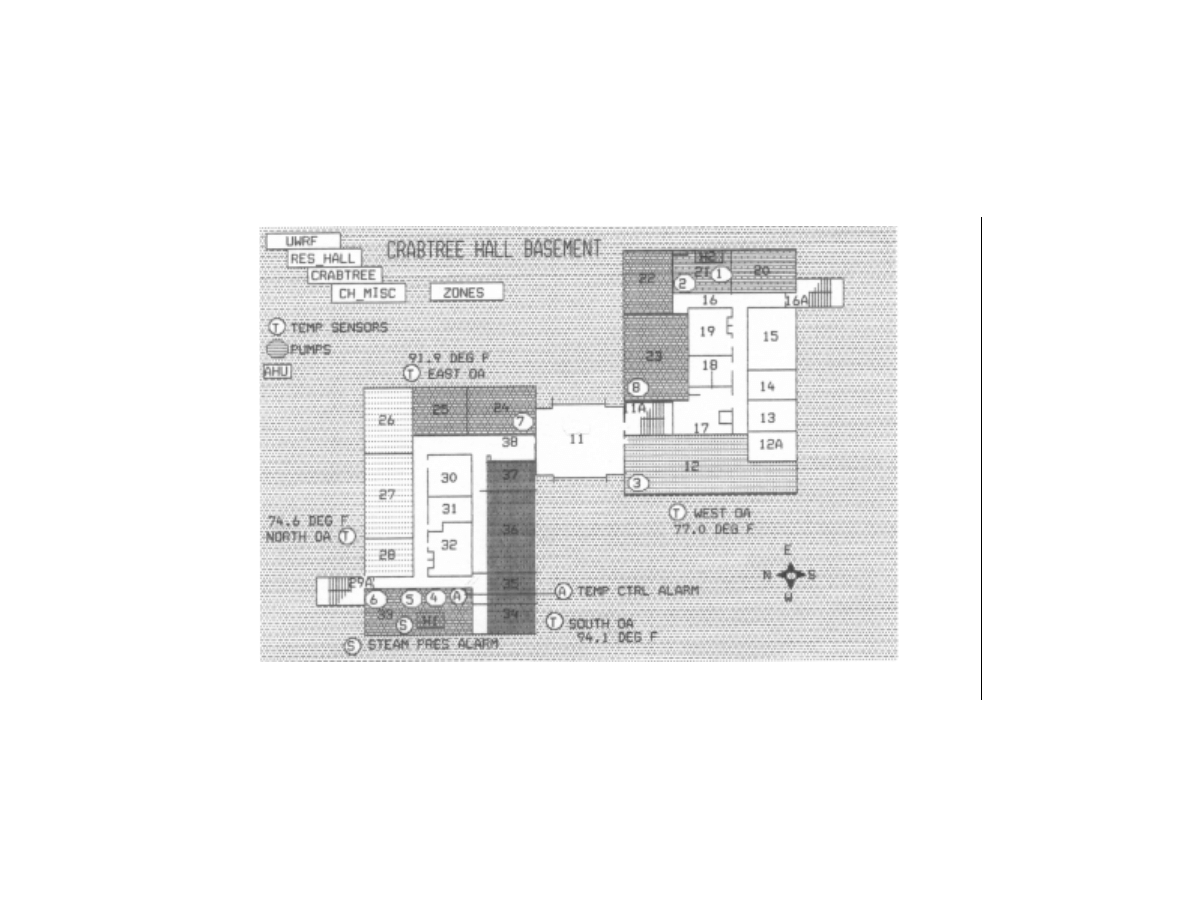
9-1. Graphic Displays (Continued)
©2002 by The Fairmont Press
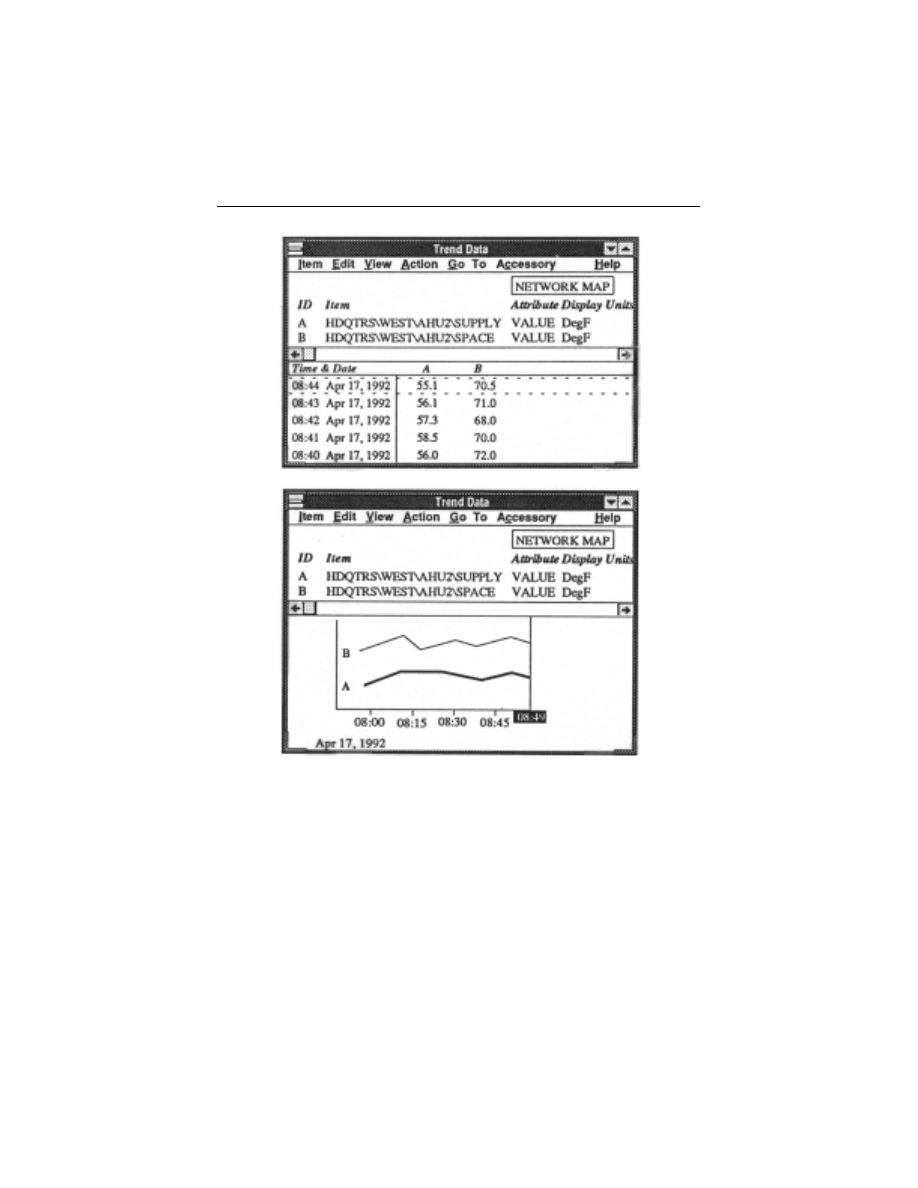
9-1. Graphic Displays (Continued)
should allow information access throughout the system to each local
panel in each mechanical equipment room. All information can then be
displayed constantly on a portable plug-in computer to allow service-
men to quickly diagnose, troubleshoot and remedy comfort problems in
a building.
Auto-dial/auto-answer communications will allow your EMS to be
monitored from remote locations, certain types of maintenance and
other functions can be accomplished from a remote location.
©2002 by The Fairmont Press

Simply by adding sensors, controls, and peripherals the system can
easily expand to manage any targeted area, often without the need for
additional hardware. The same skills, techniques and procedures are re-
utilized for each new use. The system can even be used to document the
Return On Investment (ROI) potential of a targeted management area.
The movement toward total facility automation thus becomes an ongo-
ing process of evaluation and response.
for EMS functions.
SOFTWARE PROGRAMMING
Although EMS vendors may use different names for the method
they use to program their systems, the two basic names or types are line
programming (or textual language) and control block technology.
In line programming, a series of statements leads the programmer
through a control sequence. Refer to following example:
Program HW
PUMP2
3
Status:
Wait
Size:
158 Bytes
1 SWait 30
2 ;C1=[SU.AH1
TC;OC]+[SU.AH2
TC;OC]+[SU.AH3
TC;OC]
3 ;OC=[SU.AH4
TC;OC]+;C1
4 If [OAT;CV]<;OA
Then 5
Else 10
5 If;OC>0
Then 6
Else 8
6 [SU.HWP2
SS;CV]=1\[SU.HWP3
SS;CV]=0
7 Goto 1
8 [SU.HWP2
SS;CV]=0\[SU.HWP3
SS;CV]=1
9 Goto 1
10 If [OAT;CV];OA+2.0
Then 11 Else 1
11 [SU.HWP2
SS;CV]=0
12 [SU.HWP3
SS;CV]=0
13
As can be seen by the example, it is actually difficult to identify the
process or access the program. Only the sequential control flow is shown
in this one dimensional view. It is hard to visualize what’s going on
without drawing a diagram of the text program.
With control block technology, or graphical programming, the user
draws a diagram or picture to design a control system. Both data flow
©2002 by The Fairmont Press

Table 9-1. EMS Functions
——————————————————————————————————————————————
Category
Function
Description
——————————————————————————————————————————————
1.
Data Acquisition
a.
Monitor environment
Controlled space temperatures, humidities, etc.
b.
Monitor equipment status
Verify flow/no flow, run/stop, etc.
c.
Safety and
Firestat/freezestat, boiler temperature/pressure,
maintenance alarms
compressor oil levels, run times, etc.
d.
Climate
Outside air temp., humidity, wind, etc.
e.
Analysis
Reports of trends, limits, averages, etc.
2.
On/Off Control
a.
Scheduled operation
Run equipment only when needed; defer low
priority loads to off-peak periods.
b.
Demand limiting:
(1) Load shedding
Equipment shutdowns in reverse priority order.
(2) Duty cycling
Rotating brief outages among selected loads.
3.
Optimization
a.
Optimized start/stop
Adjust operating schedules by daily conditions.
b.
Control point reset
Fine-tune local loops based on conditions.
c.
Economizer
Optimum use of outside air to reduce heating/cooling.
d.
Plant optimization
Operate equipment near optimal loading.
4.
Man-Machine
a.
Operator console
Interactive communication for operator efficiency.
Interface
b.
Intercom
Voice link from console to remote locations.
c.
Report/alarm generator
Data products to assist in maximum system use.
5.
Offline Functions
a.
Software generation
User-defined programs and modifications.
b.
Maintenance support
Scheduling, diagnosis, analysis, records, etc.
c.
Operational summaries
Verify consumption & savings, profile facility, etc.
——————————————————————————————————————————————
©2002 by The Fairmont Press
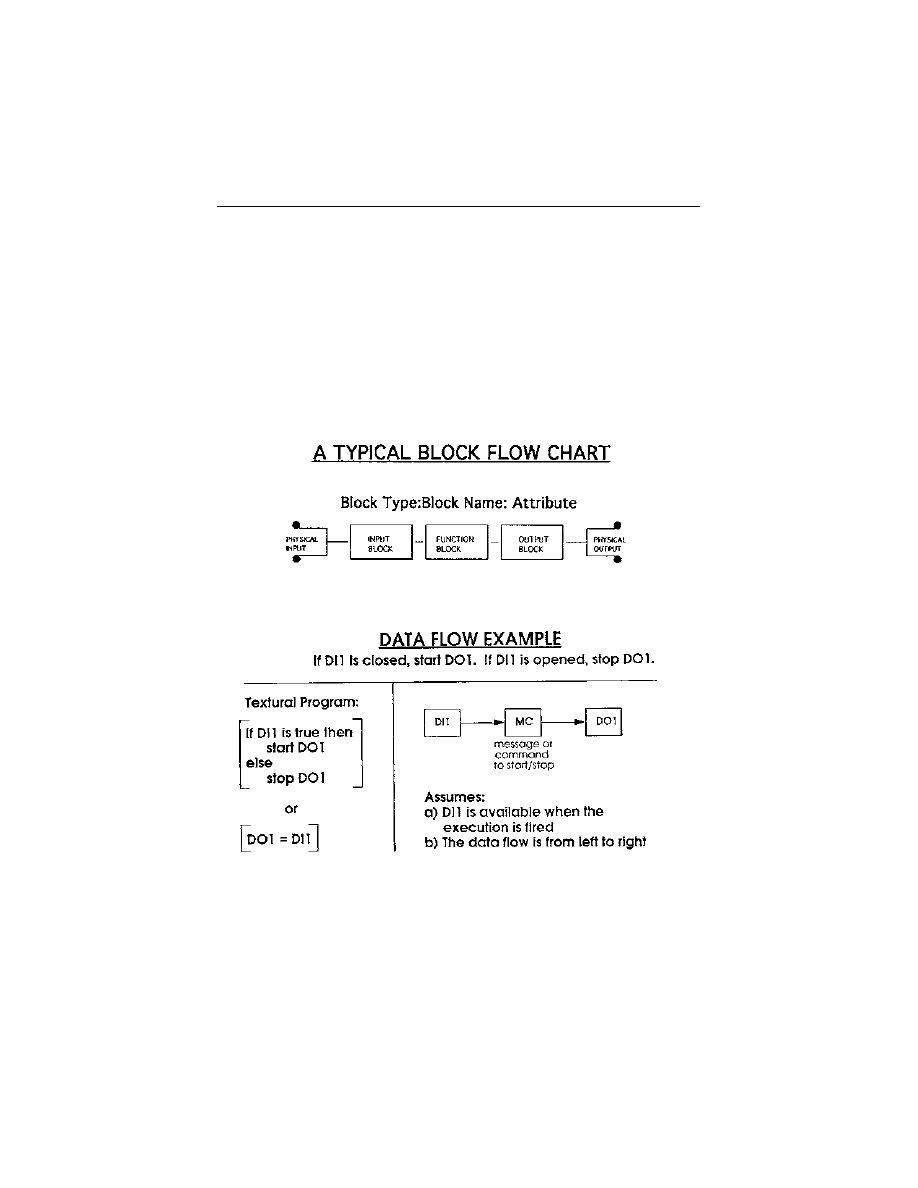
and control flow are used by connecting blocks with arrows pointing in
the direction of flow. In general, no special software language experience
is required since each control block has a direct pneumatic equivalent.
Refer to following figures 9-2 and
9-2. Block Programming
©2002 by The Fairmont Press
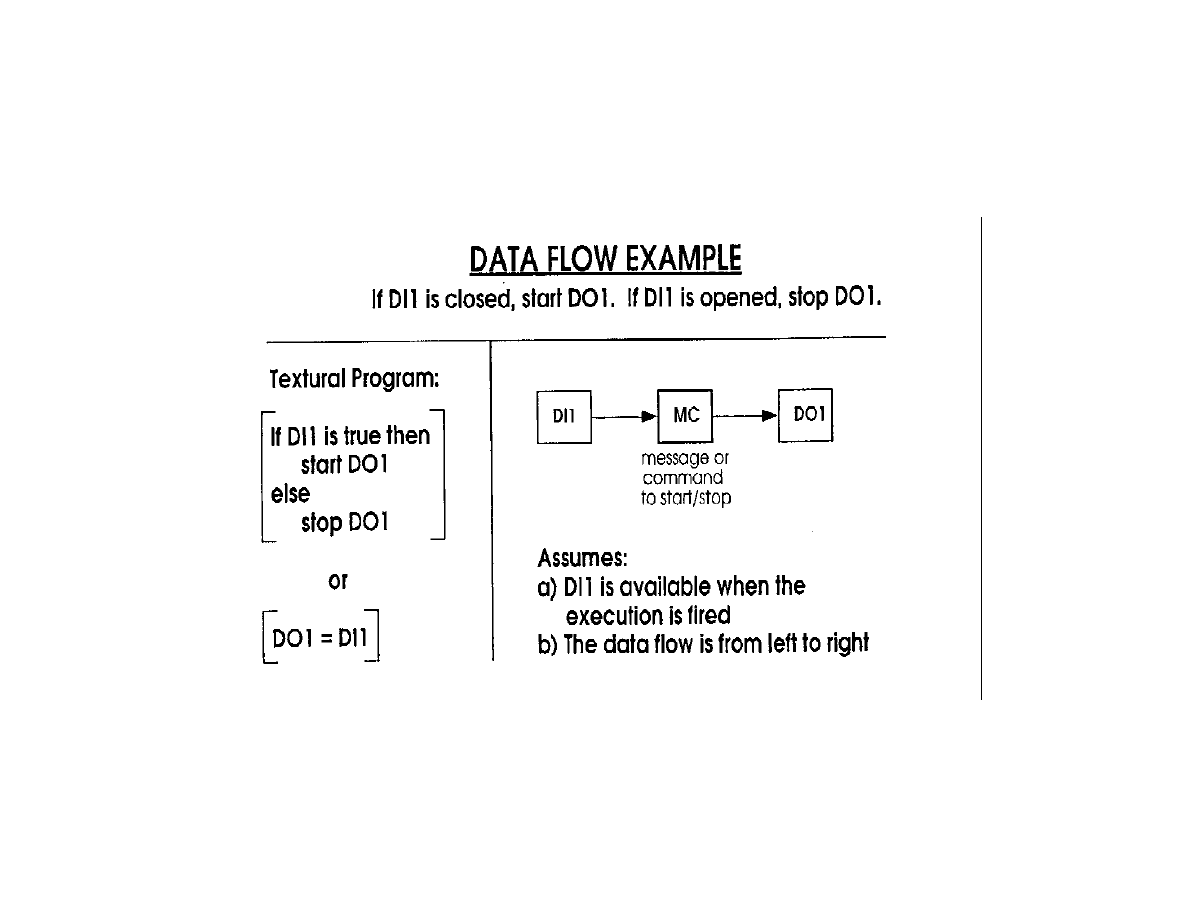
9-2. Block Programming (Continued)
©2002 by The Fairmont Press
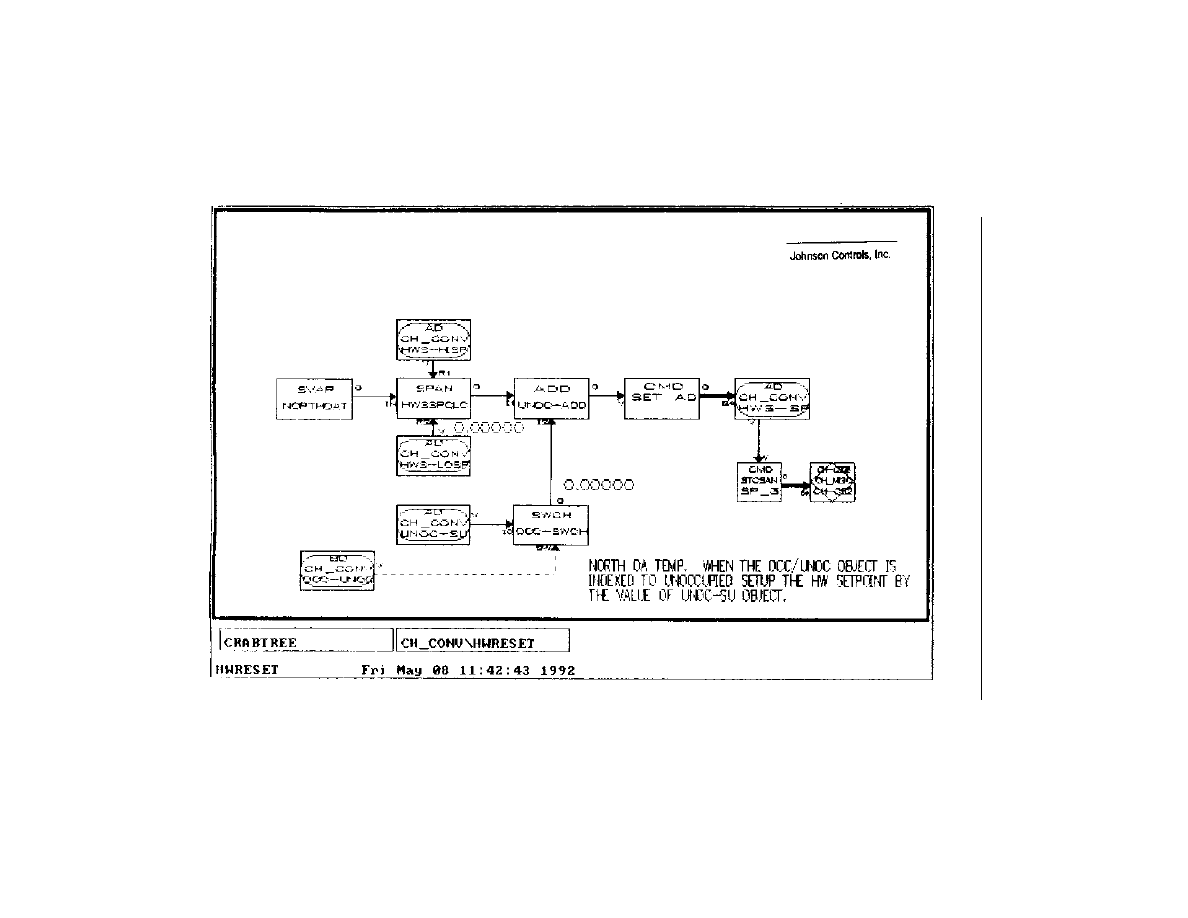
9-3. Control Block Technology
©2002 by The Fairmont Press
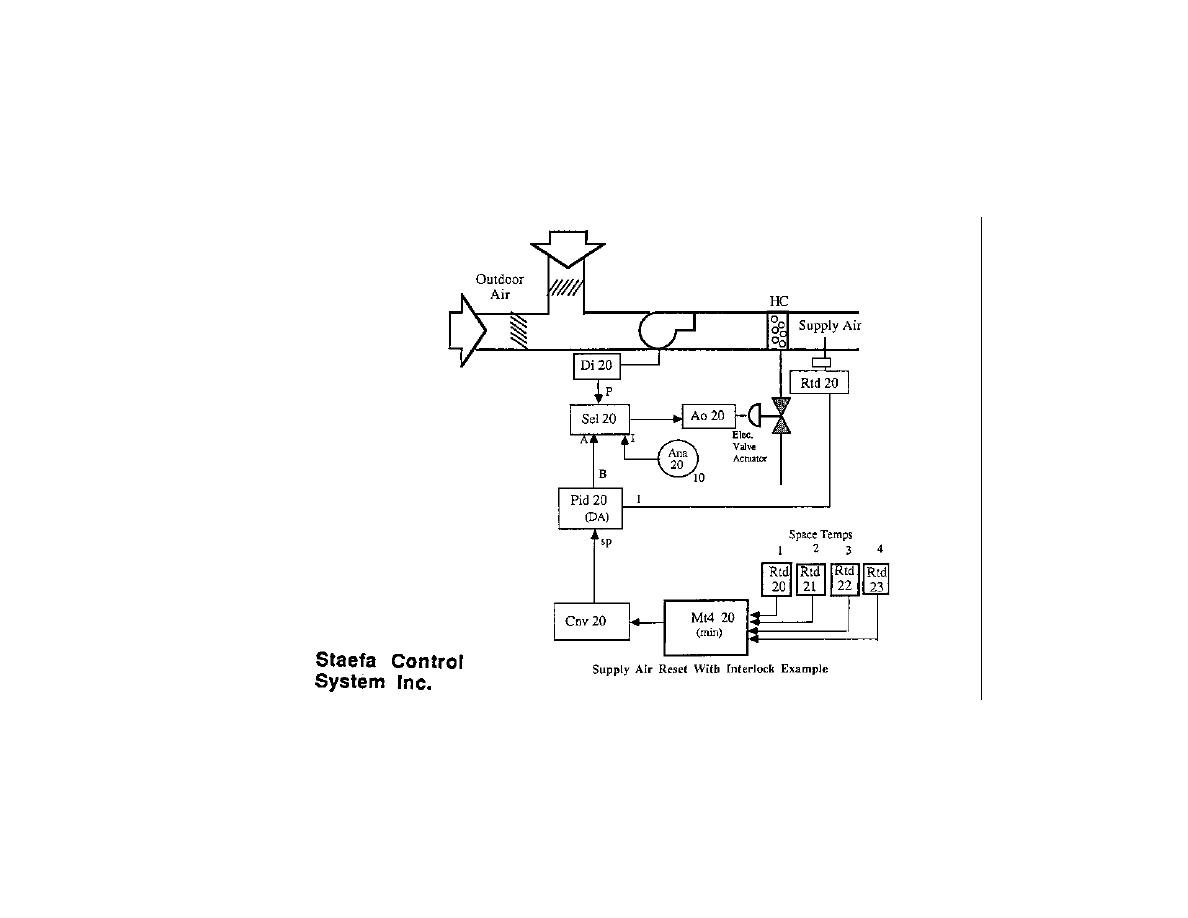
9-3. Control Block Technology
(Continued)
©2002 by The Fairmont Press

S
AVINGS
/C
OST
E
STIMATING
111
Chapter 10
Savings/Cost Estimating
very EMS should be economically justifiable. Every single point
added to the system must contribute to the total simple payback
of the capital investment for the system. The payback can be
generated by energy savings, operational/labor savings, and reduced
maintenance savings.
Do not be mislead that DDC alone will provide significant savings.
Often the closer control achieved by DDC can increase energy consump-
tion by eliminating the offset or the amount of time specified control
conditions were not met. How a system is controlled and what control-
lers are installed make a big difference in how much the costs will be.
After the engineer has defined the existing controls and knows what the
building energy envelope is over a period of a year, he can categorize
the energy-intensive areas and potential savings.
The new EMS must have changed and improved control strategies
to insure savings. Dynamic control, a theory of control that involves the
building mass in the control equation is a strategy that can provide
savings from 5-15% over conventional control theories.
Another method to increase savings is to schedule some loads at
other than peak-load times. Energy used during periods of high demand
is premium priced and rescheduling loads can bring about considerable
savings.
If building users are willing to accept certain inconveniences or
discomforts, other savings can result. For example, room temperatures
could be allowed to float from 75 to 80
°
F, thereby keeping costs down.
Fans in some air conditioning units operate continuously simply be-
cause it has never been convenient or desirable to shut them off; shut-
E
©2002 by The Fairmont Press

ting off the fans at night can save a lot of energy money. If fans must run
continuously, then variable speed drives should be installed and
through the DDC-EMS, reduced to half speed (thus saving 85% of the
power) during no or low occupancy periods.
Load cycling has been a popular function of an EMS but be aware,
the savings of 50% reduction in electricity consumption (fan ON 10
minutes, then OFF 10 minutes) will not offset the added maintenance
costs that will appear over time (usually within a year). Motors and
drives are built for continuous operation. Each time a fan system is
turned on/off, belts and pulleys wear, starters are being abused, auto-
matic valves, dampers, and controls are continually cycling; so how
much money will actually be saved? It could amount to a transfer of
dollars from electrical energy savings to maintenance costs.
Controllable loads will be either critical or noncritical. Critical
loads are those that cannot be interrupted, deferred or reduced; noncriti-
cal loads can be altered without adversely affecting the function of the
facility. Once the controls have been identified and the critical and non-
critical areas delineated, the specifying engineer will know what he has
to work with and what the magnitude of energy consumption is, and he
can proceed to the selection process.
Maintenance savings available by utilizing the latest state-of-the-
art DDC-EMS are significant. Older control systems, both computer-
ized and conventional, often had annual maintenance costs of 10-15%
of the initial capital cost. (A $250,000 EMS required a annual mainte-
nance contract of $28,000.) The current DDC-EMS maintenance costs
are in the area of 2-4% of capital cost. In spite of this lower cost, it is
advisable NOT to enter into an annual maintenance agreement. The
2-4% generally requires no maintenance at all, but rather a replace-
ment factor if something should fail. Almost like maintenance on a
light bulb … if it fails, replace it. This is obviously over-simplified.
The owner of EMS should provide for proper training of their main-
tenance staff so that most routine tasks can be handled in-house. It is
important, however, to maintain a regular contact between the vendor
and the system. A typical agreement might include six (6) one-day
inspections per year.
Energy Management Systems in general will save 5-10% of annual
electricity costs when only start/stop scheduling, optimized start/stop,
demand monitoring and limiting, and night set-back are used. In other
words, these savings result without either lighting control, chilled water
©2002 by The Fairmont Press

reset, condenser water reset, or chiller optimization. But these are sav-
ings which normally result in existing buildings even where the build-
ing operators have been very energy conscious. These systems can im-
prove upon normal manual operation and can save on demand charges
where manual or time-clock operation can not. For example, if:
Annual
5% Savings
10% Savings
————————————————————————————————
Energy and Fuel Charges
$665,700
$33,285
$66,570
Demand Charges
$589,272
$29,464
$58,927
Total
$1,254,972
$62,749
$125,497
A payback criteria of three years would permit an economic expen-
diture of three times the above savings.
3
×
$ 62,749
= $188,247
3
×
$125,497
= $376,491
With DDC-EMS control, the optimum start/stop program is dis-
cussed:
The single conventional time clock on the engineer’s central con-
trol panel can be adjusted to start units at a fixed time before oc-
cupancy to permit pre-cooling of the building.
The DDC-EMS program saves energy by starting the heating or
cooling system only as early as is necessary to achieve desired indoor
comfort conditions, with the start time based on outside and inside
temperatures.
Energy Savings: For 1000 kW of fans, the optimum start/stop pro-
gram will save an estimated one to two hours for each operating
day of the year, for a savings of $4,324 to $8,648.
(1 hour)(5)(52)(1000)(.6)($.02772) = $4324
If a building has multiple chillers, various features of the chiller
control program can be incorporated.
Without an EMS, the lead or first chiller with chiller water pump,
©2002 by The Fairmont Press

condenser water pump, and cooling tower is started with a time clock.
Additional chillers are started or stopped manually by the building
operators. Building operators normally leave the chilled water tempera-
ture at the design setting. Condenser water temperature is controlled to
the lowest permitted by the chiller manufacturer.
Discussion: The building operator will have to start and stop chillers
for both day and evening use, based on the judgment of the operator. Spe-
cific starting and stopping sequences in an EMS program can save a large
number of hours of chiller operation, compared to manual procedures.
Many building operators begin the day by automatically starting 2 or 3
chillers at the same time on the hottest summer days and let them run all
day. So the start/stop/selection procedure is important for savings.
Second, building operators normally do not change the leaving
chiller water temperature of each chiller, even though that temperature
is only required for the few days of the year that meet or exceed design
conditions. An EMS can continually adjust the leaving water tempera-
ture, for a savings of over 1% for each degree the temperature is raised.
Third, condenser water temperature can be continually reset by an
EMS in the same manner as the chiller water temperature, with a similar
savings. An EMS can also reset the condenser water temperature by the
ambient or outside wet bulb temperature and cycle off tower fans as the
condenser water temperature approaches the outside wet bulb tempera-
ture, saving additional fan horsepower.
Fourth, an EMS can be designed to provide demand control for
chillers. In addition to the savings possible through proper chiller selec-
tion to meet the instantaneous load, as already discussed, the demand
limiter on each chiller can be used to set up digital outputs for stepped
load capacity shedding of each chiller.
for an energy audit checklist.
There is no way to provide demand monitoring and control or limit-
ing through local conventional controls. This function can only be pro-
vided through a microprocessor based DDC-EMS.
Peak demands may be classified as being of three general types:
•
Morning start-up; Monday morning is usually the most pro-
nounced, if the building cooling system has been shut down over
the weekend.
•
Daytime peaks
•
Random peaks
©2002 by The Fairmont Press

Figure 10-1. Energy Audit Checklist
————————————————————————————————
Facility
Type of heating
Name
Space
Use
Domestic and service water
Floor area
Type of cooling
Number of stories
Space
Roof area
Process
Building envelope
HVAC systems
Roof construction
System number
Wall construction
Area served
Window type
Critical/noncritical
Floor construction
Type of air-side system
Exterior building dimension
Type of water-side system
Operating schedules
Type of control and existing
People
control devices
Lights
Outside air:
Process
Minimum required
Janitorial
Maximum available
Etc.
Measured running amps
Day types
Energy-consuming device (other
Weekday
than HVAC systems)
Weekend
Item
Holiday
Energy demand
Other
Operating requirements
Energy sources
Existing control
Electricity
Critical/noncritical functions
Gas
Measured running amps
Oil
Pumps
Energy cost data
Service
Elec. demand and consumption
Capacity
Gas
Critical/noncritical
Oil
Measured running amps
Rate schedules
Existing storage tanks
Historical monthly energy demand,
Item
con. data for past 2 or 3 yrs
Use
Electricity
Capacity
Gas
Critical/noncritical
Oil
Telephone system
Standby power/energy sources
Existing capability
Type
Space capacity
Capacity
Other existing communications
Electrical characteristics
systems
Voltage
Existing capability
Power factor
Spare capacity
————————————————————————————————
©2002 by The Fairmont Press
The manner in which these may appear on a graphical demand
meter must be analyzed.
Morning Start-Up: The only effective way of controlling this type
of peak is through use of some type of chiller control system which
provides for a soft start.
Daytime Peaks: These peaks are caused by the natural simulta-
neous solar, transmission, outside air and internal load peaks and may
last for several hours. In large office buildings, these peaks can be con-
trolled only by limiting chiller loading and allowing some drift upward
in space temperature.
It should be recognized that when a cooling system is designed
and sized based on 1% design weather conditions, this means that, on
the average, there will be only 30 hours during the year that are above
these conditions.
Random Peaks: These peaks occur in most buildings and are
caused by simultaneous operation of miscellaneous equipment: hot
water heaters, fans, elevators, and the like. These peaks can be con-
trolled by an EMS with demand monitoring and load shedding. Often
a load will have to be shed for only one 15-minute demand interval. If
the load to be shed is one step on a chiller, there will not be any discern-
ible change in comfort conditions for such a short period of time.
For domestic hot water control, we use this example:
Sixteen electric hot water heaters (52 gallons and 6 kW each) and
sixteen 1/12 HP circulating pumps make up the hot water system.
Each normally cycles on as required to maintain a set leaving water
temperature, and the circulating pump runs continuously unless
turned off.
Controlling these water heaters for energy savings alone is not
economical. But when demand savings, discussed earlier, are included,
such control does become feasible.
In addition to the savings identified herein, several unqualifiable
benefits are derived from features such as allowing setpoint adjustment
and control tuning from a central location. Trending of temperature and
status also provides an extremely valuable tool in diagnosing problems.
Remember, the purpose of EMSs is to conserve as much fuel, en-
ergy and manpower as possible. Specifying these systems so that they
do this efficiently, without needless and costly extras, is the best energy
and cost-conserving program the engineer can follow.
©2002 by The Fairmont Press

The accurate analysis of an EMS requires accurate and reliable cost
estimating data. Potential savings alone do not determine whether a
particular function should be connected to the EMS. The cost of that
function is equally important.
Several items implicate the cost estimating analysis. The first and
most important is that no two EMS manufacturer’s systems are identi-
cal. Another difficulty is from the reliability of budget estimates received
from manufacturer’s sales representatives since they are guarded about
revealing detail cost information.
Each component of the system must be analyzed. The main cost
components are:
1. General Cost
— Estimation
— System testing/acceptance test
— System engineering
— Training
— Shop drawing preparation
— Maintenance
2. Central Operator Station
3. Software/Graphics
4. Field Equipment
5. Sensors
6. Actuators
7. Control devices
8. Control Wiring/Piping
9. Transmission System/LAN
General costs involve a considerable amount of overhead time thus
making them slightly dependent on the size of the EMS. These costs
may be in the range of $10,000 to $15,000 depending on EMS size.
A central operator station consisting of an IBM PS/2 Model 80 with
color monitor and a printer would cost approximately $5,000. Installa-
tion and check out may add $1,000.
Software is loaded into each DDC field panel, however, it is usu-
ally the same package which would cost $8,000 plus the labor (depend-
ing on number of panels). Color graphics packages vary between ven-
dors with an average of $5,000 plus labor to build each graphic display.
There may be a separate cost for specific application programs depend-
ing on the type of EMS.
©2002 by The Fairmont Press

Field equipment would consist of the DDC panels and any re-
quired sub-panels. The DDC panels (depending on size-number of
points capacity) could be in a range of $2,000 to $5,000 each. Current
DDC panels are constructed so that all point hardware is universal …
inputs and output can be easily converted in the field.
Sensor costs vary depending on location, type, use, and accuracy
requirements. In general, a digital/relay would be $100; an analog in-
put/sensor $150; a transducer $250. Additional items to consider include
the electric utility meter and any run-time sensing equipment.
Actuators would generally be pneumatic or electric with costs at
and $200 and $400 respectively. In the past, control devices included
receiver controllers, pilot positioners, servos, and other items required to
make the EMS function. Today all control is with DDC which, for the
most part, eliminates these devices.
Wiring and cable cost will vary and is a function of the number of
connected points. Some wiring may require conduit. Control piping will
require copper or polyethelene tubing. Average cost across the board
might be $100 per 100' including labor.
The transmission system will depend on the manufacturer of the
EMS. Some may use phone lines between field panels while some may
use their own LAN configuration. Inter-Connecting within a single
building may cost $5,000.
In the above cost descriptions, realizing they are certainly not sci-
entific, but figuring 6 field panels with 200 sensors and 50 actuators (40
points/panel) for a total of 250 points, the cost totaled $140,000 or $560
per point. This is in line with EMS projects bid in the late 1980’s.
After figuring the savings, the engineer must calculate the project
payback. Generally, this is done on a simple payback method. If the
calculation indicates that payback will take more than five years, there
probably are too many items included in the project that may be nice to
have but are not energy- or cost-effective. If the paycheck indicated is
more than five years, the engineer should re-evaluate the system.
The specifying engineer should keep the EMS system simple but
make it effective—do what is needed and forget the extras. It is impor-
tant to justify everything that must be included. With the pace of current
technological developments, it may be both extravagant and wasteful to
specify a system whose components will become obsolete before they
are put to use.
©2002 by The Fairmont Press

S
EQUENCE
OF
E
VENTS
119
Chapter 11
Sequence of Events
properly applied EMS has the potential to reduce energy con-
sumption in almost any building. Following is a general over-
all approach to installing an EMS.
INITIAL CONCEPT
•
How large is your facility and what type of operation is it?
Maybe a smaller EMS would be more suitable.
•
How much energy can you save? Some EMS suppliers say that
energy savings will be 25-35%. In general, real savings are in
the range of 10-14%.
•
Understand your electric utility rate structure as it relates to
ON PEAK, OFF PEAK, and DEMAND.
•
Call other EMS users to find out the pros and cons of their
EMS.
•
Who will use your EMS?
A
©2002 by The Fairmont Press

INFORMATION RETRIEVAL
This step in the process should include floor plans, HVAC system
diagrams, temperature control schematics, wiring diagrams, lighting
levels, and utility bills for the previous year (preferably previous three
years). As you examine the electric bills, and especially the demand
charges, you may see that the demand portion is as much as 40% of the
bill charges. The question then is, how much can this demand be re-
duced?
CANDIDATE BUILDINGS AND SYSTEM SELECTION
The physical size of a building is not so important. Rather, it’s what
is going on in that building and how can changes in operating strategies
be incorporated. Operating and maintenance personnel should be ques-
tioned about operating procedures of the various utility systems under
their control. Interviews should be conducted with these personnel:
1.
What is the general condition of HVAC equipment compo-
nents?
2.
What are the operating problems?
3.
What are the maintenance problems? Operation of tempera-
ture controls? Filters? Belt and other drive? Lubrication?
Pumps? Heating systems? Chillers?
4.
When and why does the system waste energy- electricity,
steam or chilled water?
5.
Identify and review the operating schedule of chillers, the
method of starting and stopping the unit (manual or auto-
matic).
6.
Reviewing lighting levels and maintaining minimum levels
required for specific area requirements (offices, lobbies, hall-
ways, laboratories, etc.).
©2002 by The Fairmont Press

FIELD SURVEY
Locate all related equipment on reduced size floor plans noting
measured capacity of each system (power and CFM or GPM). Do not
rely on so-called “as built” diagrams. You may find your HVAC equip-
ment operating at 60-70% of design specifications.
Obtain the actual operating schedules of each building and of all
HVAC units.
Analyze the temperature control sequence of operation for each
system to determine if it is “energy obsolete.” Control redesign changes
should be recommended where necessary.
SYSTEM DESIGN CONSIDERATIONS
Numerous factors must be considered in designing and specifying
a system that will meet a facility’s requirements.
a.
Cost-effectiveness is the basic criterion to be used in determining
which type of system will yield maximum return on investment.
b.
Adaptability—that is, how well a system can be adapted to an
existing facility—involves many important concerns, such as the
following: Will the system fit into the existing space? If the space
is not readily available, can it be made available? Will new con-
struction be necessary? Can the EMS system be interfaced with
existing local controls, or will the controls have to be replaced?
c.
Building system utilities energy savings functions should be auto-
matic, not manual.
d.
An EMS should be able to monitor energy used hour by hour, day
by day, and produce permanent records when required.
e.
System control loops should be upgraded where possible, to save
energy (for example, fan system economizer cycles could be added
to systems not operating on minimum outdoor air only).
f.
An ongoing energy audit on a monthly basis should be initiated
when the system becomes operable.
©2002 by The Fairmont Press

g.
The system design shall be such that monitoring the environment
shall be both for comfort and safety of occupants.
h.
The system should incorporate fire and security functions where
these functions can be improved via an EMS central operator sta-
tion.
i.
The system control console would be easy to operate by non-tech-
nical personnel.
CONTRACT DOCUMENT PREPARATION
Drawings and specifications—the contract documents—must be
prepared for the system that is selected. Drawings must be reviewed
carefully for completeness and accuracy; they should clearly and pre-
cisely indicate the designer’s intent; and they should be carefully coor-
dinated with the specifications in showing the components’ functional
relationships.
Specifications should address major concerns such as degree of
accuracy, level of access, use of existing controls, use of electric power,
factory debugging, acceptance testing, and training.
Do not use documents written around one supplier.
CONTRACT
Consider utilizing a two-step procurement procedure that pre-
qualifies suppliers before pricing.
Do not award contracts simply to the lowest bid unless you have
prequalified the bidders.
INSTALLATION
Manage the construction and installation of an EMS thoroughly …
supervise closely, ask questions, and learn by “looking over his shoul-
der.”
A “bargain” on the initial cost can result in thousands or hundreds
©2002 by The Fairmont Press

of thousands of dollars being wasted in the long term. The facility
should ask each contractor to provide references from other facilities in
which its equipment has been installed and should check with respon-
sible personnel at those facilities to assess their experiences and satisfac-
tion with the equipment and the contractor.
A major concern is the project manager to whom the contractor
assign the project. In fact, the capabilities of the project manager can
make or break the project. Ideally, the project manager should be expe-
rienced in HVAC systems and their controls as well as in electronics
applications. The facility should check his background and should deter-
mine how much time he will be spending on the project, who his assis-
tants will be, and who the backup personnel will be.
After the system has been installed, but before acceptance tests are
begun, the contractor should debug the system by operating and cali-
brating each point in the entire system. Personnel should be located at
both central and remote locations so that, when each function is per-
formed, readings are taken at the central station, and the actual function
is observed and the readings are verified at the remote station.
ACCEPTANCE
Once again, human verification of the readings must be obtained
for all points in all locations. After each point in the EMS system is
calibrated and it has been ascertained that all points are in operating
order, the system must be operated as a complete entity for acceptance
testing.
It is beneficial to have the outside or in-house maintenance staff
members actively engaged in the debugging procedure. They can par-
ticipate with the operators in the initial training that is provided by the
contractor, and they can gain experience with the system so there will be
relatively few surprises later if problems arise.
OPERATION AND MAINTENANCE
The facility’s personnel must be trained so that they understand
the concepts involved in the system, how to perform their functions in
relation to the systems, and how their functions interrelate. They should
©2002 by The Fairmont Press

be provided with manuals from the contractor and some type of on-call
troubleshooting arrangement with the contractor should be established
so that the personnel at least can have their questions answered.
Maintainability of a system depends on the manufacturer’s or
supplier’s ability to support the facility’s in-house maintenance efforts
through training programs and manuals and, equally important, if not
even more so, to make available professionally trained maintenance
personnel. Whenever possible, the facility should check the
manufacturer’s references to determine whether other users of the pro-
posed system are satisfied with the maintenance services provided by
the manufacturer.
VERIFY PAYBACK (ONE YEAR LATER)
©2002 by The Fairmont Press

S
ELECTION
/E
XPANSION
125
Chapter 12
Selection/Expansion
ollowing is a list of questions and comments relating to EMSs
which are most commonly asked, intelligent questions that re-
quire an answer before committing money to an EMS installa-
tion. (Those items with an asterisk [*]—should receive top priority.)
1.
*What do you need—not what is available?
All to often, prospective EMS buyers are lulled into a sale with
all of the color and promises of a full blown system. Maybe a
smaller simple-to-operate EMS will suffice.
2.
*What are your people capable of doing—not what you would
like your people to be capable of doing?
It is easier to start with a smaller EMS that has a limited num-
ber of primary features than to have a 1,000 point system in-
stalled and must be operated by personnel who may be intro-
duced to a EMS for the first time. Give your operators the
opportunity to get comfortable with this new system on a
small scale basis and gradually work into a larger more sophis-
ticated EMS over time.
3.
*What will your costs and savings ultimately be—not what
some vendor has projected or verbally promised?
F
©2002 by The Fairmont Press

A common made mistake, is that an EMS is sometimes pur-
chased by a building owner before an energy audit and evalu-
ation is performed. Simplified forms are often provided by the
EMS vendors for the owners or occupants to quantify the en-
ergy consumption by fuel type for the particular building con-
sidered. This information is then evaluated using various as-
sumptions such as HVAC equipment scheduling, duty cycling,
demand control, lighting control, and optimization of heating
and cooling.
4.
How long has the manufacturer been in business manufactur-
ing EMS (or DDC) systems?
5.
*How long has the installer been in business installing EMS
systems?
Be certain that just because the installer is “the best electrical
contractor in the entire city,” he has also had experience install-
ing EMSs.
6.
How many systems has the manufacturer installed;
that are comparable to your proposed system?
that are working?
to the satisfaction of the owner?
7.
Is the system modular and upward expandable?
8.
Is hardware and software fully compatible from the smallest
system to the largest system?
9.
*Can the EMS operator communicate with the system for day-
to-day operation in English language?
Software programming for EMS operators has improved over
the years. Most EMS manufacturers have provided for English
language capability as well as mouse driven prompting. Re-
cent color graphics software packages offer custom interactive
displays that simulate knobs, dials, switches and gauges found
©2002 by The Fairmont Press

in hard-wired control panels. With the mouse you can change
setpoints, operate equipment, print reports, or rework a sched-
ule.
10.
How much control over the system software does the manu-
facturer have? Do you have?
11.
Knowledgeable computer people are not “a dime a dozen,”
but there are, and will be many computer engineers and tech-
nicians available in the near future.
12.
Must you contact the manufacturer every time you want to
consider an update program or when you want to create a new
application program?
Where is the manufacturer located, or must he travel a great
distance?
13.
What are the costs for the various features, changes, source
codes, updates?
Is the material taped or are you required to pay a duty charge?
14.
What are the maintenance costs for 1 year? For 5 years?
15.
What are the system components prices? What are the labor
rates?
16.
What are the qualifications of your own staff?
Be prepared to dedicate a full-time technician-type employee
for 6 months to 1 year.
17.
How thoroughly will the system be checked out after installa-
tion (prior to the start of the normal 1 year guarantee period)?
©2002 by The Fairmont Press

I
NSTALLATION
/C
OMMISSIONING
129
Chapter 13
Installation/
Commissioning
he entire EMS should be installed by skilled technicians, elec-
tricians and mechanics, all of whom are properly trained and
qualified for this type of work. Electricians are obviously ex-
perts in electrical work; however, they may not have a background in
the HVAC related field. (A mixed air sensor should not be located in the
return air duct; a differential pressure switch will not provide proper air
flow status/alarm of the fan if one of the sensing tubes is extended
outside the building.) Similarly, a steamfitter mechanic may not know
the first thing about wiring a motor starter or installing conduit. Each
trade has their own separate procedures and regulations to guide them.
For these reasons, each EMS project should require a vendor-supplied
project manager. He should have a minimum of five years in the tem-
perature controls/EMS business and has experience in managing previ-
ous EMS projects.
The system and materials should be installed in accordance with
manufacturer’s instructions, roughing-in drawings and details shown
on submittal diagrams. All electric cables and polyethylene tubing
should be extended and connected to numbered lines inside of all field
panels. Sufficient spare cable (minimum of 5 feet) should be provided to
allow final terminations. Be certain that all wires and air lines are alpha-
numeric coded.
The EMS contractor should be responsible for all installation in-
cluding:
T
©2002 by The Fairmont Press

MATERIALS
•
All EMS panels, automation devices, and enclosures
•
All mounting hardware
•
All interconnecting wire, junction boxes, terminal strips, etc.
•
All sensors, relays, contractors, and other input/output field hard-
ware required to satisfy approved point list sequence of opera-
tions.
•
Any additional materials required to constitute a complete and
functional installation.
INSTALLATION
•
All wiring between panel and remote devices
•
Mounting of panel(s)
•
All electrical terminations required to satisfy approved point list
and sequence of operation.
•
Calibration and final check-out of all installed devices
•
Installation of all devices/equipment specifically allocated to EMS
contractor.
•
Provide 10% spare wire pairs on multiconductor runs
ON-SITE SUPERVISION
•
Continuous on-site supervision of installation personnel shall be
provided by an employee of the EMS contractor regularly and
primarily responsible for such supervision.
•
Sufficient on-site supervision by the vendor’s application engineer
shall also ensure that all work is satisfactorily completed as sub-
mitted and approved.
©2002 by The Fairmont Press

AS-BUILT DRAWINGS
•
Application engineer shall formulate “as-built” drawings showing
any changes between submittal drawings and actual installation.
COORDINATION—WITH OTHER TRADES AND WORK
•
The EMS contractor shall be responsible for providing necessary
interface to mechanical equipment, lighting, etc. at time of submit-
tal. EMS contractor shall not be responsible for providing addi-
tional interface required by significant changes to equipment/in-
stallation provided by other contractors.
•
All materials and workmanship provided and performed under
the specification shall be guaranteed by the EMS contractor for a
period of one full year commencing on date of substantial comple-
tion of system installation and being placed in useful service pro-
viding the special functions. Modern day EMS vendors have been
known to offer a 2 or 3 year guarantee because they have that
much confidence in their product.
The implementation or installation phase is critical to the success-
ful operation and ultimate control of an EMS. Knowledgeable and com-
petent personnel should be assigned to monitor the installation activities
of the contractor(s). The personnel selected should be: 1) familiar with
the facility and system, 2) experienced in the present control network,
and 3) have full understanding of the overall project scope that will
provide assurance that all interfacing components and techniques are
incorporated during the installation.
A continuing problem with design and construction is the fact that
the design engineer has often completed his or her duties and has left
the project by the time the design is ready for commissioning and start-
up. This is a bad practice because it denies the engineer the important
feedback that can be used to make the next project more effective. It is
also harmful to the project because contractors, who do not necessarily
understand the concepts behind the physical design, are the ones who
must make it work. When systems are simple, little harm can come from
this practice, but it can be very detrimental when advanced technology
©2002 by The Fairmont Press

systems are to be installed. Contractors who do not understand the in-
tent of the design often make adjustments that operate counter to the
intent of the design as they try to make the system perform property.
The best solution is to see that the design engineer remains with
the project through its start-up. The engineer retains responsibility for
ensuring that the systems are brought to an operating state that meets
all the design criteria. This includes taking direct charge of the develop-
ment of all energy management system software that will provide the
control sequences to operate the building. It also includes responsibility
for providing the owner’s staff with the understanding and training
required to operate the building as desired.
EMS commissioning requires expert technicians skilled in the start-
up of such systems. It becomes a tedious job, but each and every point
should be tested 100% functional regardless of how long it takes.
Some earlier EMSs required an integral intercom system installed
between all field panels and the head-end CPU. These proved to be
valuable when commissioning a project as it provided a means to com-
municate with remote sites during the debugging process as well as
maintenance procedures. However, an intercom system integral with an
EMS is expensive and must be maintained. Most owners prefer to use a
walkie-talkie system which are much less expensive and can be used for
a variety of other functions.
Functional and operational tests of the hardware, subsystems, soft-
ware and the complete EMS must be required and enforced.
A final test of the complete system in the fully-operational mode is
required in the project documents and enforced in the field to assure
compliance.
A “Substantial Performance Test Procedure” is used in British
Columbia, Canada for an EMS project bid in early 1990. See following
three pages which include an operational check-out, (7) Day Test, and
documentation.
SUBSTANTIAL PERFORMANCE TEST PROCEDURES
Overview
Before the SEVEN (7)-day acceptance test may begin, the EMCS
must be completely operational including the following:
©2002 by The Fairmont Press

1) Every point shall be checked end to end to ensure accuracy and
integrity of systems. Each point will appear on one of the sheets
in Clause 7 and be signed off by both persons involved in the
commissioning procedure.
2) Basic control strategies shall be written in Operator Control Lan-
guage (OCL).
3) Time schedules shall be built and in control, replacing time-con-
trolled equipment.
4) Displays shall be built for each logical air handling system, boiler
systems, chiller, etc.
5) Each control loop measured variable, controlled variable and set
point if calculated; shall be placed on a FIFTEEN (15)- minute
continuous trend for at least TWENTY-FOUR (24) hours to prove
stability of loop.
6) Each space sensor shall be placed on a THREE (3)-hour trend for
One Hundred (100) samples.
7) Runtime totalizer shall be set on all digital outputs.
8) Load/save of panel programs must be demonstrated.
9) If included, sample dynamic graphics shall be built as demonstra-
tion of graphic capabilities.
10) Ail features of system shall be exercised.
11) Operator shall be briefed on operation of system.
12) A trend on one panel shall be set up for a point from another
panel. This point shall also be trended in its own panel for the
same intervals. Comparison of the two trends will indicate if any
communication problems are occurring during the SEVEN (7)-
day test.
©2002 by The Fairmont Press

13) Related DIs and DOs shall be connected to show alarm condition.
During SEVEN (7)-day Test
1. Fire alarm will be tested to ensure correct action of all fire and
smoke sequences.
2. Power failure for building will be simulated, system recovery
monitored.
3. Control strategy upgrade shall be started which will exercise
most features of the system.
4. Demonstration of modem operation will be required.
5. Demonstration of hardware low limits and damper interlocks
will be required.
6. Spot checks of points end-to-end integrity will be carried out. If
several problems are identified, a complete reconfirmation of
system integrity will be required by Contractor.
7. Printer shall be left on for complete SEVEN (7)-day test. All print-
outs will be kept for review at completion of list. An alarm printer
shall be supplied by the Contractor if none is supplied in this
contract.
Documentation
The following documentation must also be in place before comple-
tion of SEVEN (7)-day test and Substantial Acceptance is granted:
1) Panel layout sheets complete with point name, point address and
wire identification number. One copy attached to each respective
panel door.
2) All points tagged with point name, point address and panel num-
ber.
3) Points Check-Out data sheets showing final set points values
during calibrations.
©2002 by The Fairmont Press

4) As-Built control drawings showing interface with existing con-
trols.
5) As-Built ladder wiring diagrams showing all hardware interlocks.
6) Complete Operators Manual.
7) Apparatus and Maintenance Manual for all sensors, transducers,
solid state relays, etc.
8) Reduced floor plans showing sensory, terminals and panel loca-
tions.
9) Electrical approval certificate.
10) All of the above information, with the exception of #2 (point tags)
shall be bound and presented in FIVE (5) manuals to be left on
site.
Once the basic above requirements are met and all other features
of the system are complete and acceptable, Substantial Completion shall
be granted. A deficiency list shall be prepared and holdbacks applied.
All deficiencies shall be corrected prior to Total Performance. Warranty
shall start from the date of Total Performance of the work.
©2002 by The Fairmont Press

T
RAINING
/O
PERATION
/M
AINTENANCE
137
Chapter 14
Training/Operation/
Maintenance
TRAINING
he success of an energy management system is contingent
upon a careful balancing between the EMS itself, the mechani-
cal system of the building complex, and the users of the EMS.
The importance of the user must not be overlooked as the integral link
between the EMS and the building complex. Even an operator whose
only job with the system is to monitor system outputs needs training in
order to understand and properly react to messages. The training may
serve simply to remove fear of the computer from the mind of the op-
erator.
The type and amount of training required depends on the com-
plexity of the tasks an individual will be asked to perform, and as the
operator’s responsibilities with the system increase, so will the amount
of required training. A user who will be performing very complex func-
tions such as specifying or developing computations, interlocks, or con-
servation strategies must have a sound knowledge of the capabilities of
the system as well as of how the various features interact.
The types of EMS training approaches vary widely. They should
teach theory and include hands-on experience. They should also be for-
mal, done at the user’s site, or done at a remote location.
For a simple EMS or for an operator who will have limited use of
T
©2002 by The Fairmont Press

an EMS, the use of system documentation with some informal on-the-
job training may be satisfactory. Responding to routine system messages
and performing routine building functions is probably easy, so it is rea-
sonable to practice right on the system which is controlling and moni-
toring the building functions.
As the complexity of the EMS increases, or as an operator becomes
responsible for more complex processes in the system, the effectiveness
of on-the-job training as a single source of training soon becomes unsat-
isfactory. In these cases, formal off-site training has several advantages.
Formal off-site classroom training has the advantage of removing
the student from the distractions inherent to on-the-job training. Also,
when extensive formal training is done off-site, the student is immersed
in using the system, requiring the individual to rely only on the EMS to
solve building problems, again minimizing distraction. This experience
results in more efficient and creative use of the system.
When available, formal courses offered by the EMS vendor at the
vendor site teach the proper use and range of capabilities of the system
along with how features interact. The instructor is likely to be a full-time
professional who learns firsthand from the system designer how the
system works. This type of training is important for most medium-to-
large systems which may include a few hundred to several thousands
points.
Extensive formal training is not complete without hands-on use of
the EMS. Whereas classroom training is important to teach concepts and
system structure, it is the hands-on experience which makes the training
most effective. This hands-on experience may be on the user’s own EMS
or on the same type of system in a laboratory situation.
Many users initially feel that hands-on training at their site is most
beneficial since students are learning precisely how their system is ap-
plied to their building complex. This experience is definitely important,
but might better come after the laboratory situation.
During the training period, experimentation and errors are bound
to occur and are an important aspect of the learning process. However,
errors and experimentation made on a system which is actually monitor-
ing and controlling a building could be life threatening (if fire manage-
ment is involved) and costly (in terms of energy or property). In a lab
situation, it is safe to experiment with new ideas and gain expertise.
Then the knowledge can be applied to a real system. Also, in a lab situ-
ation, it is easy to simulate building functions and problems such as
©2002 by The Fairmont Press

temperature change or equipment failures in order to prepare the stu-
dent to better react in a real situation.
Even if extensive formal off-site training is done, training is not
complete. Time is necessary to allow the operators to become familiar
with details of how their EMS works and to implement newly gained
ideas. Also, time is required to become “fluent” with the system, and it
is natural to expect the operator to rely on the system documentation,
perhaps indefinitely. However, answers to all application questions of-
ten are not in the documentation. Therefore, armed with extensive train-
ing that has given the user a clear and accurate understanding of how
the system features work and interact, the operator can put the features
to use so that they best apply to the building in which the EMS is op-
erating.
The timing of training is also important. An EMS user should not
plan on a formal training period (only) after the system is installed. A
certain amount of knowledge can be gained during the installation
phase. Advance copies of equipment data sheets and other vendor infor-
mation will be beneficial during this phase of the project. Ideally, it is
best to have some training both before and after installation is complete.
If the user is a first-time EMS owner, additional follow-up training
periods will be required at six and twelve month periods after installa-
tion to be certain the EMS is operating as originally intended and to
answer questions that are bound to come up.
The success of any EMS comes only through its use. It will be used
only if the building personnel understand its capabilities and see them
as valuable to their jobs. This can happen only if they are trained to
apply the EMS. Energy management systems applied to medium and
large buildings are of an implementation and functional complexity that
training from either experienced users or a formal instructional organi-
zation is required for a successful application of the system. Smaller or
less sophisticated systems may be adequately applied through docu-
mentation and on-the-job training.
OPERATION
Lack of sufficient training is the major problem facing EMS own-
ers. Because of this number one problem, the next most often mentioned
problem is the inability to properly program or reprogram the system.
©2002 by The Fairmont Press

Following are some common problem-related statements made
with regard to the EMSs:
“We’re unable to shed loads during peaks due to customer discom-
fort.”
“We need an outside person to reprogram.”
“The system fails to respond in a timely manner, resulting in the
need to override it.”
“Most of the people responsible for operating the system know
very little about HVAC operation and, since that’s what it controls,
we’re limited in what we can accomplish.”
To avoid being a presenter of such statements, EMS owners must
realize that someone is going to have to operate the system so select, in
advance, the person(s) who will be responsible for its use. Also, realize
that it will take time (as much as six to twelve months) for operating
personnel to become “experts” at the operator terminal keyboard. EMS
operators must know the building mechanical and electrical systems
and therefore an office secretary, although an excellent typist, will not
necessarily be qualified to operate the EMS in the most efficient manner.
Monthly utility bill with energy consumption data should be routed to
the EMS operator as soon as possible so that data stored in the EMS can
be checked and verified.
MAINTENANCE
Maintenance falls into two categories; physical maintenance on the
EMS itself, and software maintenance programs that modern EMSs are
capable of storing and implementing. This section will be directed at
maintenance on the systems.
There are generally two classifications of maintenance.
1. Vendor supplied on a one-year basis.
2. Time and material.
©2002 by The Fairmont Press

Early systems, prior to the early 1980’s were designed around a
mini computer. It was the fear of many owners that “if the computer
went down, it would cost tens of thousands of dollars to repair or re-
place it.” This, coupled with the magnitude of electronics in the field
panels forced many customers into annual vendor supplied service/
maintenance agreements. It was not unusual for such an agreement to
average 15-25% of the installed system cost. Furthermore, it amounted
to the purchase of an “insurance policy.”
Present day EMS-DDC systems no longer require the large central
computer and, coupled with the more reliable microprocessor circuitry,
expensive maintenance contracts should be a thing of the past. Actual
practice has shown that if the vendor is contracted to check the entire
EMS twice a year and replace defective parts, the cost will quite possible
be 3-5% of the installed system cost.
©2002 by The Fairmont Press

F
IRE
A
LARM
/S
ECURITY
143
Chapter 15
Fire Alarm/Security
n automatic fire alarm system-FAS (typically made up of
smoke detectors, manual pull stations, audible and visual
warning devices, and a fire alarm control with remote notifi-
ation capability) can provide early warning of a developing fire. In all
situations, the installation of such a system is for the primary purpose
of life safety. When a fire strikes, instant detection coupled with a
prompt and suitable action is vital if the safety of people and property
is to be maintained. It is recommended that system inspection and test-
ing be scheduled monthly or as required by national and/or local fire
codes. Adequate written records of all inspections should be kept.
Given these parameters, along with the fact that FAS have ad-
vanced over the past several years from hardwired to multiplexed to
computer controlled, a question confronting building owners is: “do we
want to have this system stand alone or do we want to combine the FAS
with an EMS.”
Points to keep in mind while addressing this issue include:
1.
Has the microelectronics and local area network (LAN) data com-
munications industries advanced far enough in reliability to allow
the combination of two separate systems?
2.
Will the response speed in reporting both the first fire alarm and
successive alarms be compromised as the FAS and EMS both try to
communicate at the same time with a central operators station?
A
©2002 by The Fairmont Press

3.
Will the same operator monitor both the EMS and FAS (FAS may
require 24 hour per day monitoring)?
4.
Will the operator, who may have an excellent understanding of
HVAC and the mechanical features of a building, also have equal
expertise with the entire FAS?
5.
EMSs do not require the rigid attention and regular testing and
maintenance that a FAS requires. Testing and maintenance of an
FAS will have to be strictly adhered to.
6.
Will electronic malfunctions in the EMS affect the FAS?
7.
The communication protocol must be the same for both EMS and
FAS. Individual manufacturers in each separate field do not share
the same protocol; how can we expect manufacturers in separate
fields to share this information?
A typical, modern day stand-alone FAS (depending on system
design) may include the following:
•
Intelligent, addressable smoke/heat detectors: intelligent means
that analog information is reported in the form of a measured level
of smoke, product of combustion, or the thermal measurement of
each device. Addressable means that each device is continually
reporting its type and status.
•
Addressable manual alarm stations: used to manually initiate a fire
alarm.
•
Horns/strobes for audible/visual alarm notification.
•
Control panel (microprocessor-based): this is the brain of a FAS. It
provides power to the system and electronically supervises its cir-
cuits. The panel contains logic circuits that receive signals from
alarm initiating devices and transmits them to alarm indicating
appliances and equipment.
©2002 by The Fairmont Press

Depending on system design, a panel may:
•
Provide audible signal sounds throughout the building.
•
Provide automatic alarms to a fire department or to a central sta-
tion, where a fire department can be notified.
•
Shut down ventilation fans to prevent recirculation of smoke.
•
Close doors to prevent the spread of smoke.
•
Release fire extinguishing agents.
•
Notify of water flow in a sprinkler pipe system.
•
Return all elevators to first floor.
•
Provide firefighters telephone system.
•
Provide emergency audio evacuation communication.
Peripherals:
•
Printer to provide hard-copy printout of all changes in status of the
FAS. RS-232C interface.
•
CRT monitor with keyboard that displays all changes in status of
the FAS. RS-232C interface.
•
Color graphics system displays floor plans, text message and flash-
ing alarms of initiating devices.
The fire protection industry, like other industries, is finding big
improvements in products with the use of more reliable electronic
equipment. Microprocessor-based FASs can pinpoint fires faster because
every addressable device is identified by location, priority, sensitivity
and detector type. The system also can continue to operate without dis-
connecting an entire zone if a single detector fails.
Security systems, which are not necessarily involved with life
safety, also rely on instant notification to a central operator station
whenever an alarm device is activated.
Microprocessor-based systems bring many benefits to these systems as
well:
©2002 by The Fairmont Press

•
Reduced system hardware size (for a given number of zones).
•
Reduced system cost.
•
Easily reconfigured, modified, or upgraded system.
•
Reduced wiring and installation costs.
Protection devices include:
•
Magnetic contact switches
•
Glass break detector
•
Photoelectric beam detector
•
Motion detector
•
Microwave sensors that provide an alarm signal when motion is
sensed within sensor range (30 Ft. 120 Ft. range).
In cases where security functions coexist within the system along
with fire systems, the system response time requirements may be more
stringent. Microprocessors have the power and speed, when properly
programmed, to make the necessary split second decision for an auto-
matic and reliable response to any type of conflagration or intrusion.
©2002 by The Fairmont Press

D
ESIGN
/D
RAWINGS
/S
PECIFICATIONS
147
Chapter 16
Design/
Drawings/Specifications
stablishing the goals and objectives of the EMS which matches
a specific environment is a difficult task. The problems in-
volved are related not so much to unreliable equipment as to
failures in human communication. From the owner’s point of view, it is
essential to define exactly what is required in a system and who is re-
sponsible for providing it.
A kickoff meeting should be held with all persons involved who
will eventually have some part in the process. It is advisable to create a
checklist at this meeting. The checklist will serve to define the overall
needs as well as delegating responsibilities. A set of building plans
should be available to assist in ensuing discussions.
A walk-through of the facility usually takes place immediately
after the kickoff meeting. In the walk-through, outside consultants be-
come familiar with the facility and the location of all major energy using
equipment.
The building’s energy envelope must be defined and specific en-
ergy using equipment within that envelope identified.
Data-collection
may take place over a period of several days or
weeks. This process includes: monthly energy consumption data from
the previous year (three years is preferable, to establish trends which
may be occurring); the skin of the building—which is influenced by
weather and the environment; lighting; people; and other variables such
as opening/closing doors, traffic patterns, and general/specific building
E
©2002 by The Fairmont Press

use. Specific equipment such as fan and pump motors, chillers and other
energy users must also be taken into account.
During the field survey, on a small-scale set of floor plans, all
major equipment should be located. Then, with the assistance of oper-
ating/maintenance personnel, all those items which are thought to need
repair and/or replacement, should be identified. It should also be deter-
mined which of the many energy-consuming devices can be controlled.
Some processes simply cannot be remotely and automatically controlled.
Equipment capacities, (measured-not specified), hours of operation,
maintenance, and operating procedures should all be recorded.
The connected load and maximum electrical demand must be care-
fully studied. A building may have 100 kW of connected load, but this
total is rarely, if ever, used. Generally 70 percent or less, and sometimes
as low as 25 percent, of the connected load, may be used at any one time.
Over the period of a year, the electrical demand will vary depending on
the weather, the building’s function and the processes involved.
Existing control systems
in a building must be carefully analyzed
and defined. The basic energy conservation controller—the time clock—
will no doubt appear in this audit.
Air conditioning equipment is controlled in several ways, includ-
ing hot and cold decks, mixing dampers, outside air cycles and econo-
mizer control cycles.
If modulating outside-air/return-air dampers are already part of
the system, it will be less expensive to convert to a DDC-EMS. However,
if there is only a minimum or fixed outside-air system, it may be costly
to add an outside-air cycle. Duct openings would have to be cut into the
walls, existing ductwork may have to be rebuilt, powered exhaust and
recirculating air system may have to be added, and so on. A number of
energy (or media) control possibilities exist: a modulating valve, an
open-and-close valve, a 3-way bypass, primary/secondary pumping
loops, etc.
The building may already be equipped with compressed-air-actu-
ated pneumatic controls, or voltage-actuated electric controls that cause
control apparatus to modulate, or electronic controls that operate valves
or dampers. The problem then is integrating already existing control de-
vices with a new EMS. Major changes may be required for compatibility.
The prices for EMSs vary in order of system magnitude. The speci-
fying engineer must know exactly what is needed before deciding on
such a system. If a $50 remote clock can do the job, there is no reason
©2002 by The Fairmont Press

to spend $5,000 to have a microprocessor turn a system on and off.
The analysis of HVAC systems and controls will indicate both
what can be done and what control interface will be required.
DDC/EMS may be installed to upgrade existing controls and/or
reduce energy consumption. Is an old system is to be replaced, list prob-
lem areas that the new system should solve. Often new control systems
are installed with little thought to the objectives. Old systems may be
replaced with new systems having the same design problems. Define
what needs to be controlled and how.
The field survey should also include the following: potential loca-
tions of field panels and available power, possible locations for instru-
ments and controls, type and location of motor starters, location of util-
ity metering, and the number and location of building zones.
The next step in the process is to select energy conservation pro-
grams that are applicable to the project. Even though many software
programs include the basic programs as a standard feature, it doesn’t
pay to invest time in items which do not apply. Hot water heating reset
from outside air temperature would not be considered if there was no
fintube radiation system.
After the programs have been selected, a points list must be pro-
vided to enable the vendor to determine the number of panels, type of
points, relays, sensors and other field hardware requirements. An input/
output summary form can be used which will eventually be included in
the project specifications. The point schedule allows a logical presenta-
tion of input and output analog and digital signaling associated with the
system along with alarm points and application programs to be applied.
(See
and
Contract documentation will include drawings and specifications.
In general contract drawings will not have to be presented at great
detail. Block diagrams, suggested layout, and suggested locations of
field panels and equipment will be required. Precise details are not re-
quired because each vendor will bid the project based on their configu-
ration of hardware.
The location of the operator’s console should be clarified as to
room number and general location.
of an EMS central control room which may have been required in the
early 1980’s. However, with the advent of distributed DDC EMSs, the
only desk-top hardware required for the operators station is shown in
©2002 by The Fairmont Press
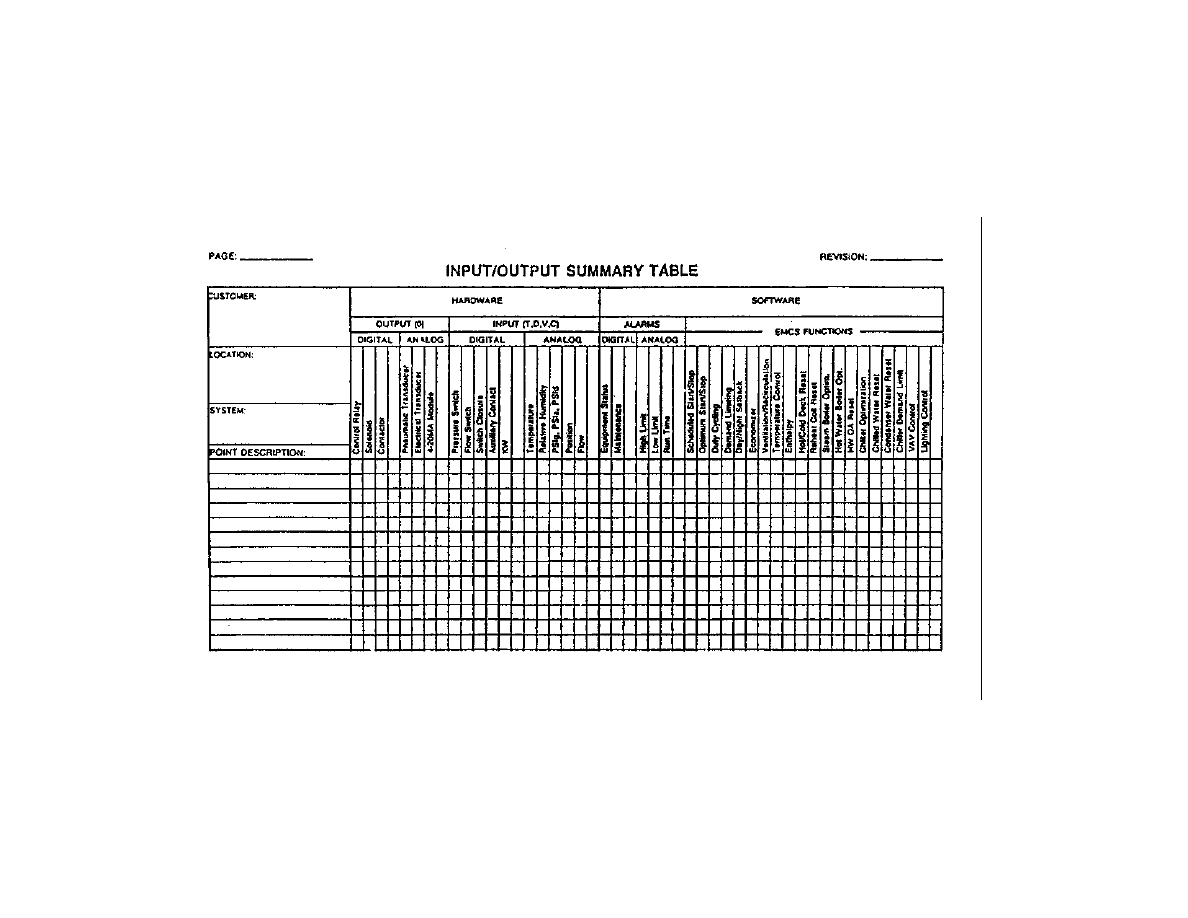
16-1. EMS Point Table
©2002 by The Fairmont Press
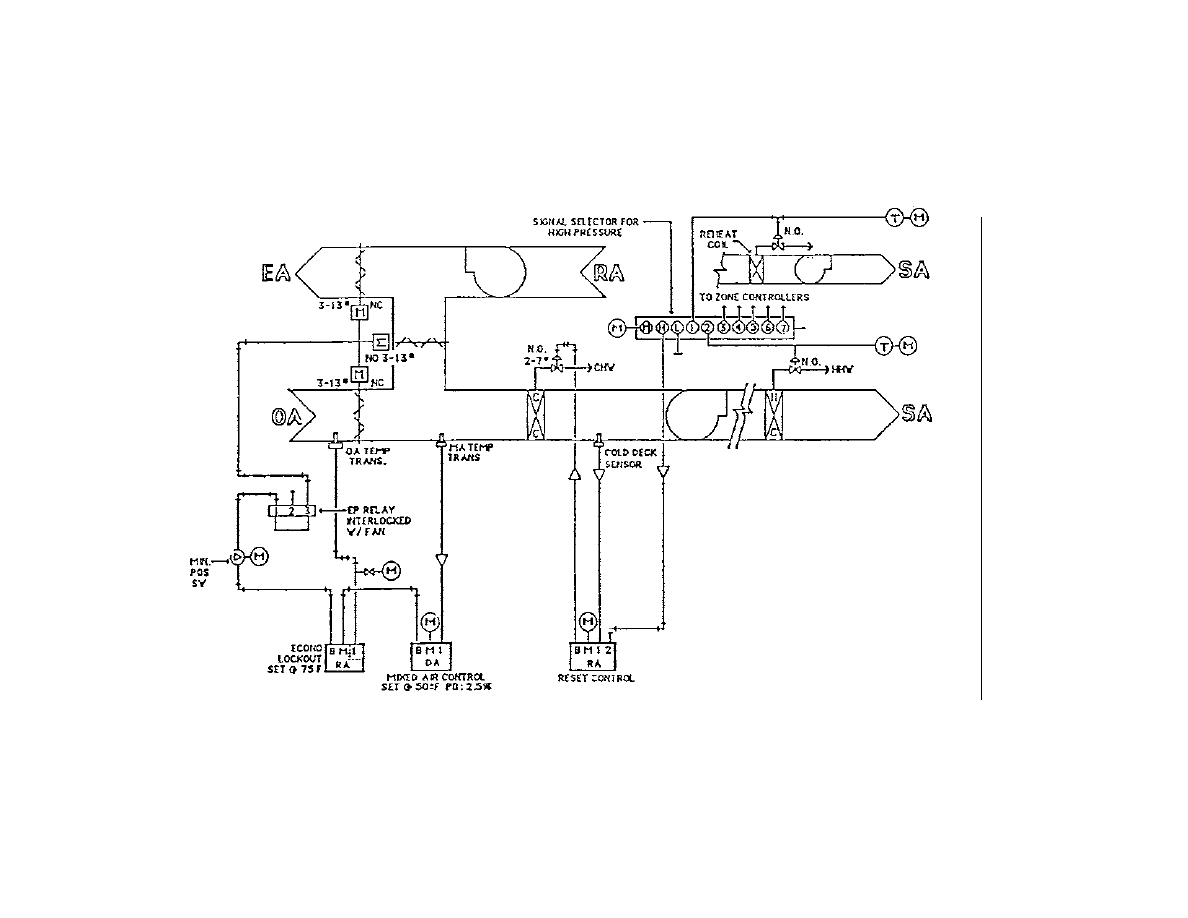
EXISTING CONTROL
SCHEMATIC
AIR HANDLER #2, 3, 7, 8, 9, 10, 12, 15
MULTI ZONE
16-1. EMS Point Table
(Continued)
©2002 by The Fairmont Press
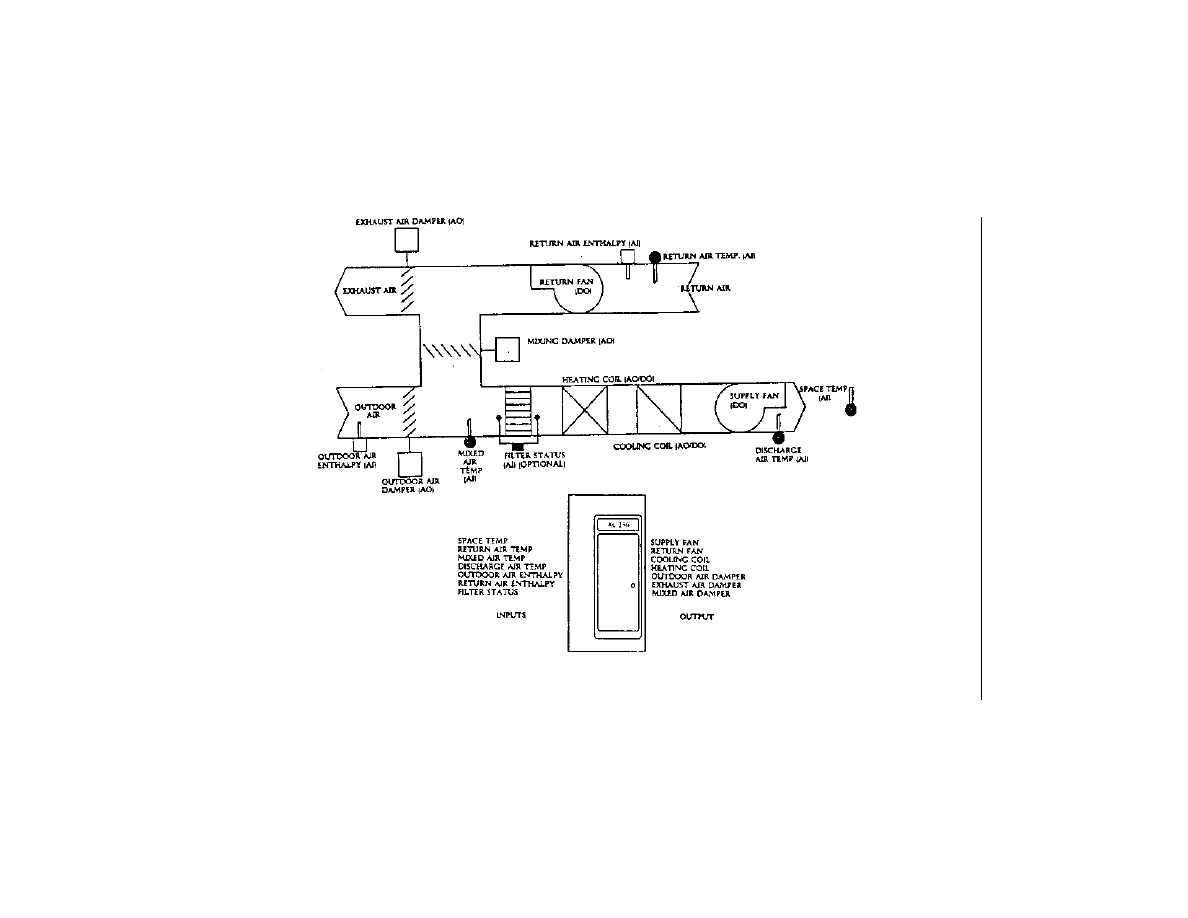
16-2. ANDOVER HVAC Schematic and Point Table
©2002 by The Fairmont Press
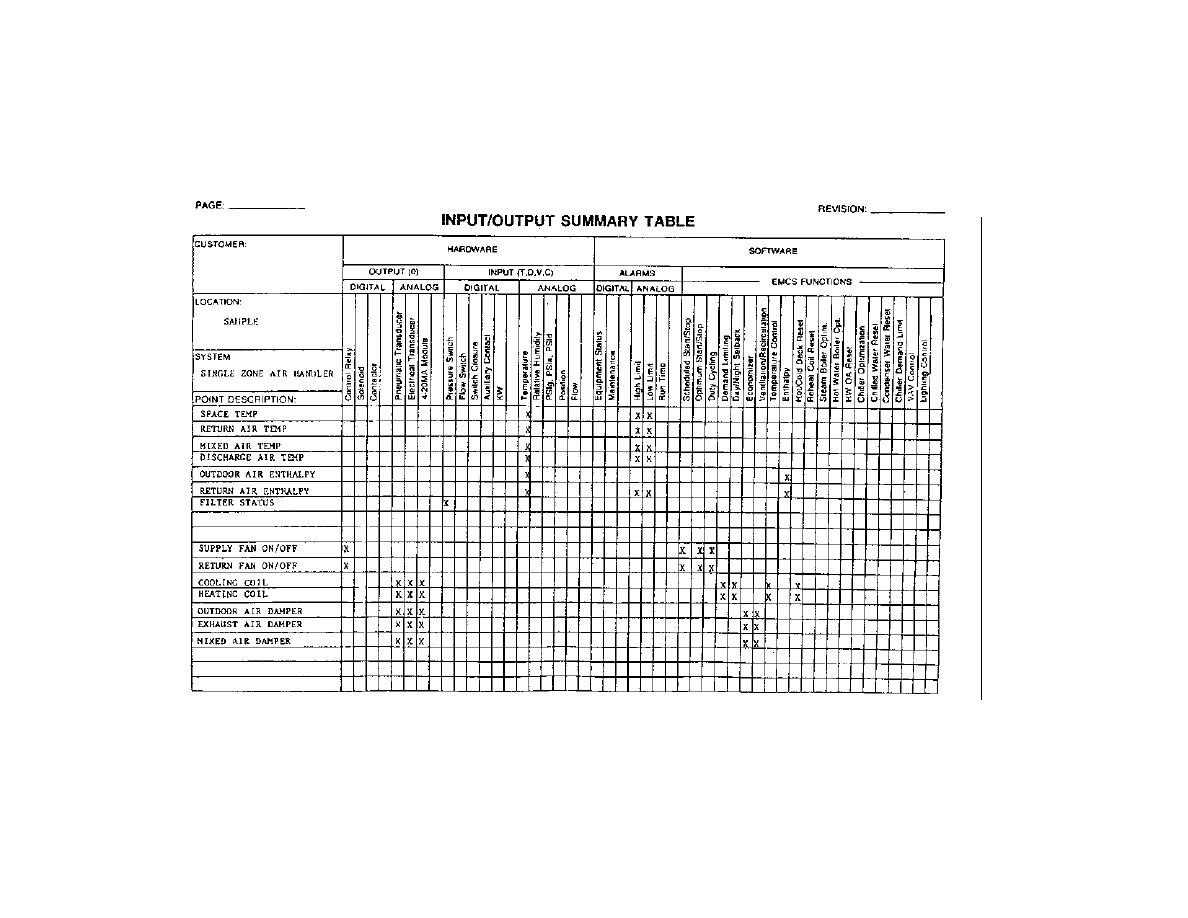
16-2. ANDOVER HVAC Schematic and Point Table (Continued)
©2002 by The Fairmont Press
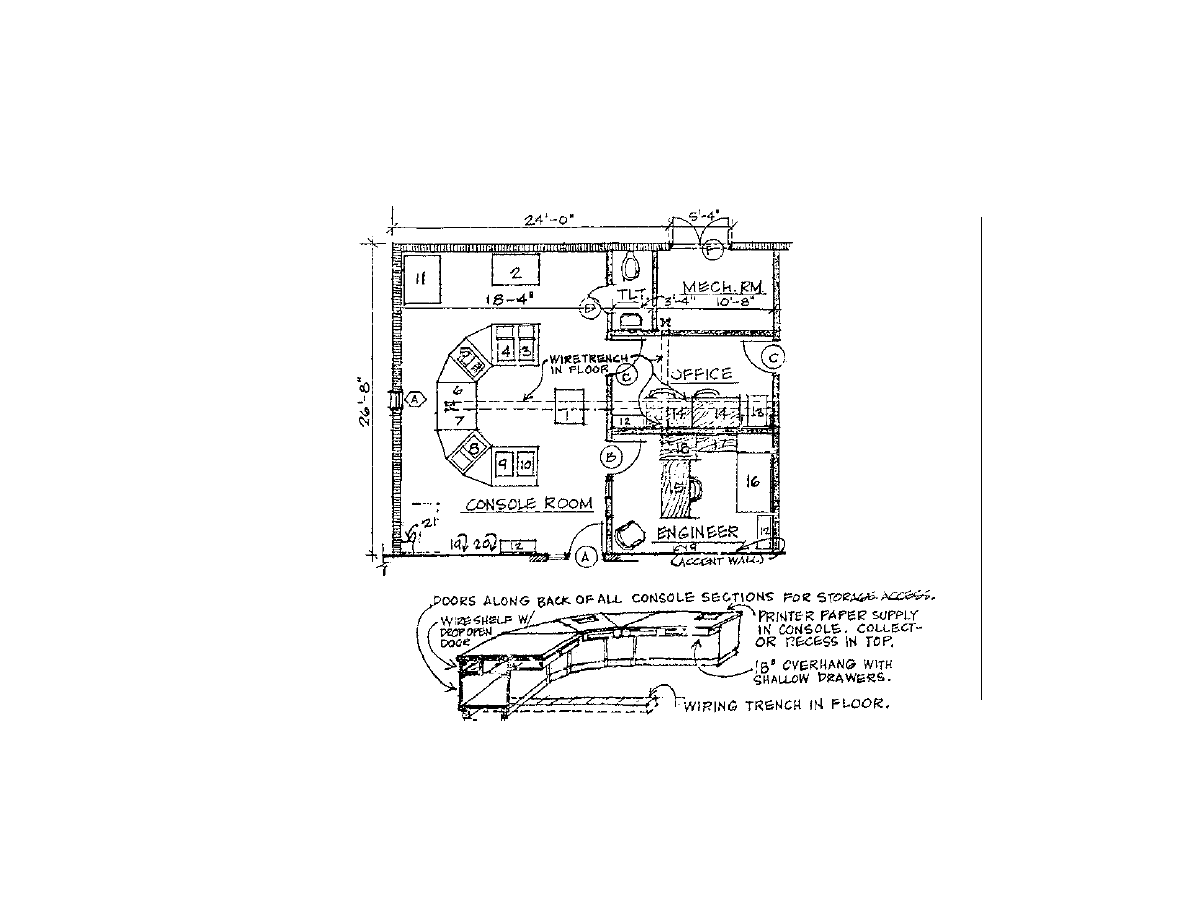
16-3. EMS Control Room
©2002 by The Fairmont Press

16-4. DDC-EMS Operator Work Station
A system block diagram should be provided (as you perceive it)
which shows the general system layout and basic architecture including
the central operator station, field panels, power available, and connect-
ing transmission cables. If telecommunication capabilities are desired,
show same and indicate if each DDC panel is to have this same type of
interface. Individual input/output devices are not shown on this dia-
gram since they are specified in the
Quantities of hardware
for a four-building DDC-EMS
System Block Diagram).
In addition to floor plans, a site plan must be included to show
building orientation and the location of remote electric substations, tele-
phone lines, underground utility tunnels or conduits (especially impor-
tant where multiple buildings are involved) and the major pieces of
equipment that will be connected to the EMS in some way even though
it might be a simple lighting timer switch. (See
Equipment Layout).
Floor plans
should include the location of existing equipment such
as fans, pumps, temperature control panels, time-clocks, air compressor,
lighting timers/switches, room sensors and all other items that will be
connected to the EMS. Actual room numbers and names should be
shown as well as all pertinent information and any notes that may assist
the installers performing their work. The finished product should in-
clude everything you would want on the drawings if you were the in-
staller. Well-presented documents will result in a clear understanding by
all parties involved. (See
©2002 by The Fairmont Press
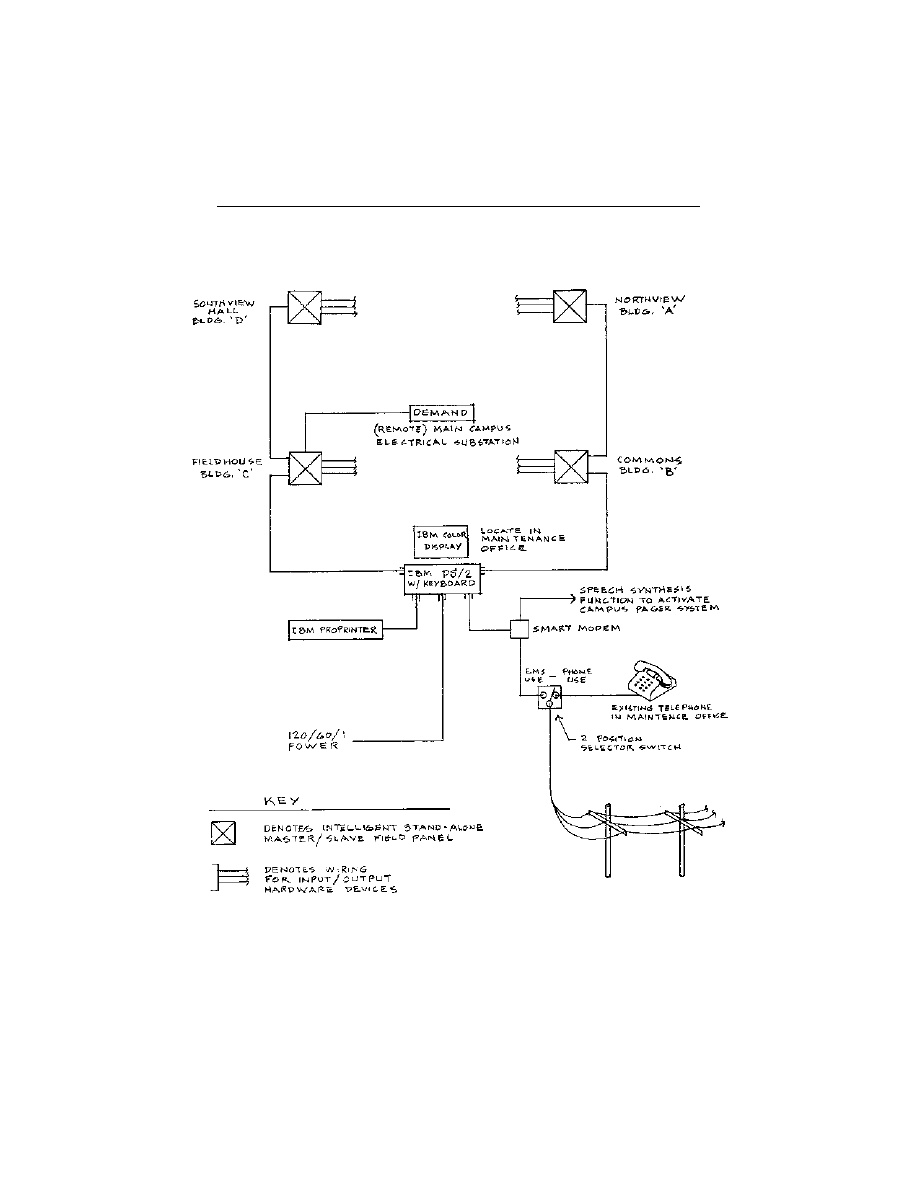
16-5. DDC-EMS System Block Diagram
©2002 by The Fairmont Press
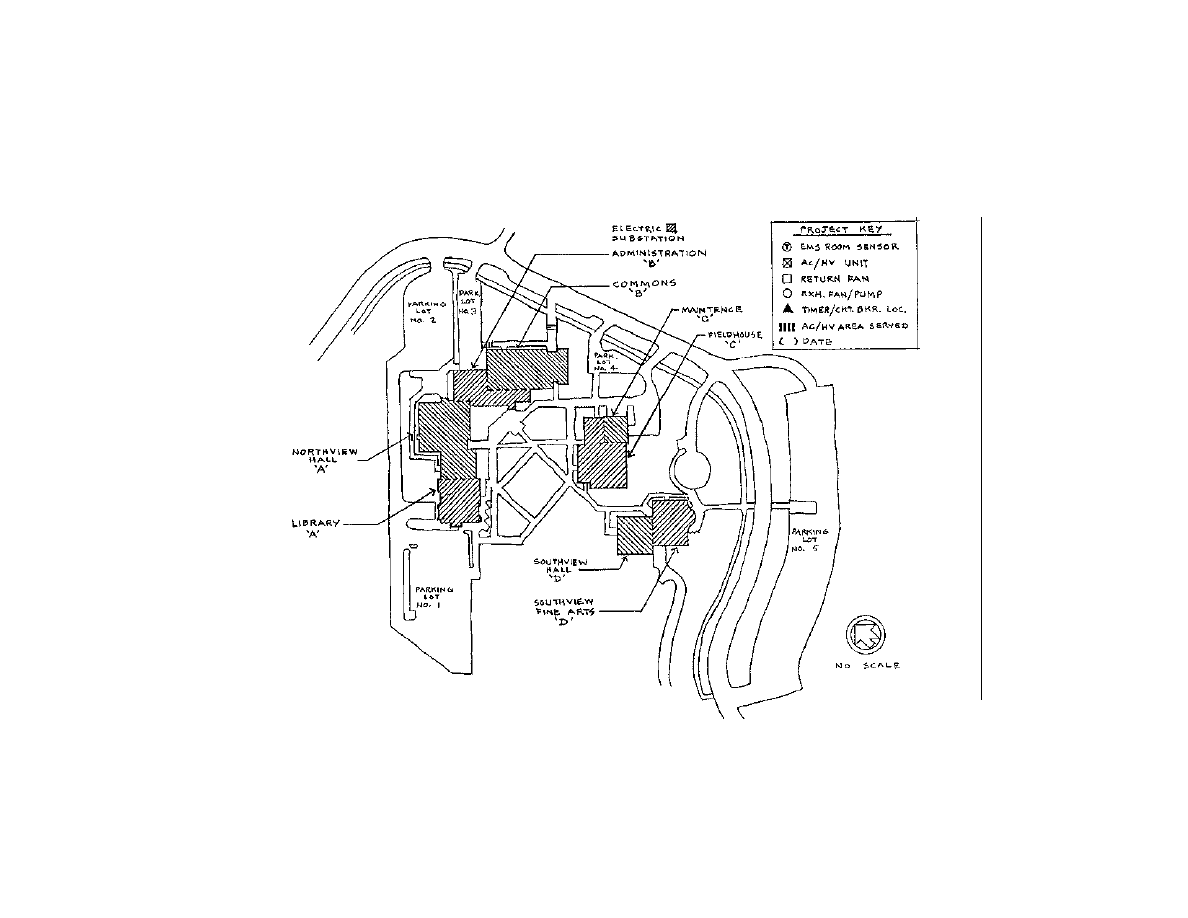
16-6. Site Plan/Equipment Location
©2002 by The Fairmont Press
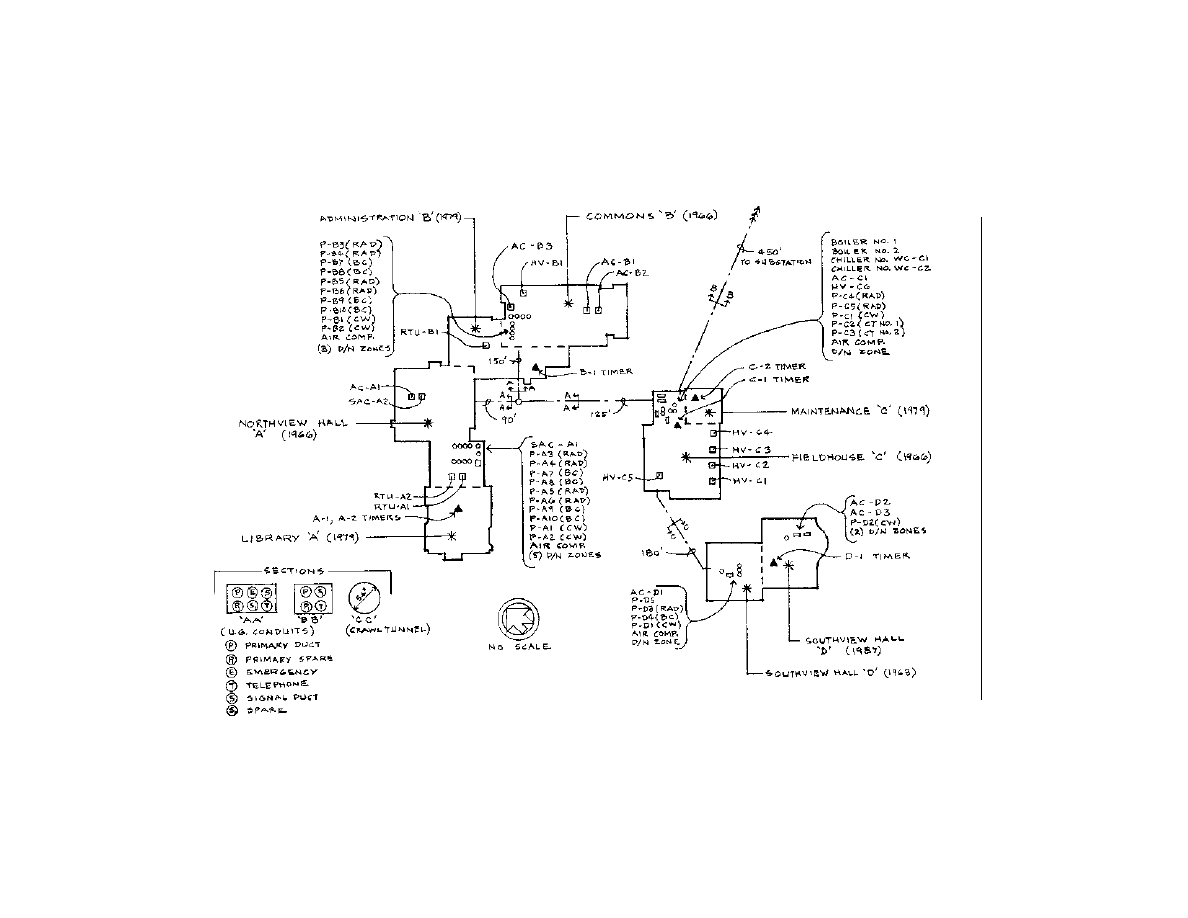
16-6. Site Plan/Equipment Location (Continued)
©2002 by The Fairmont Press
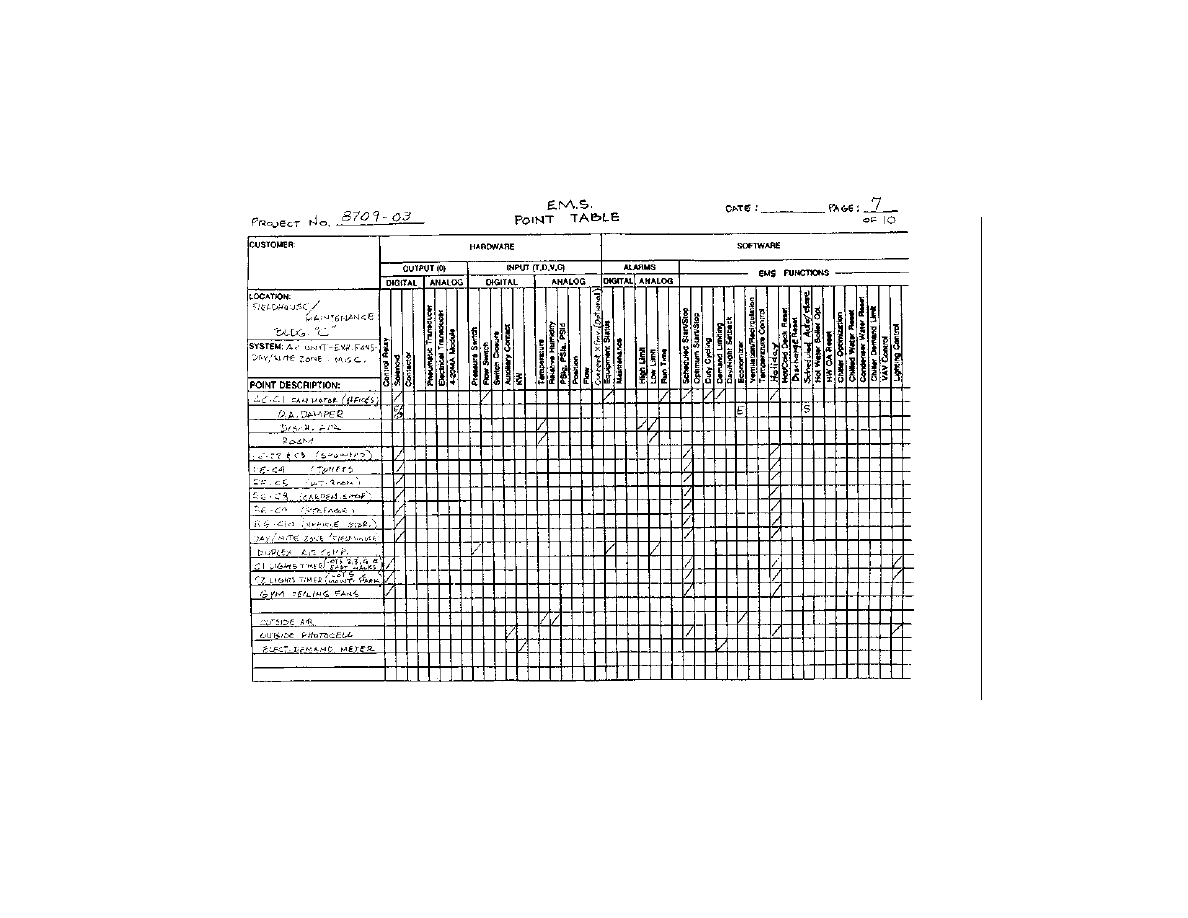
16-7. Floor Plan/Point Table
©2002 by The Fairmont Press
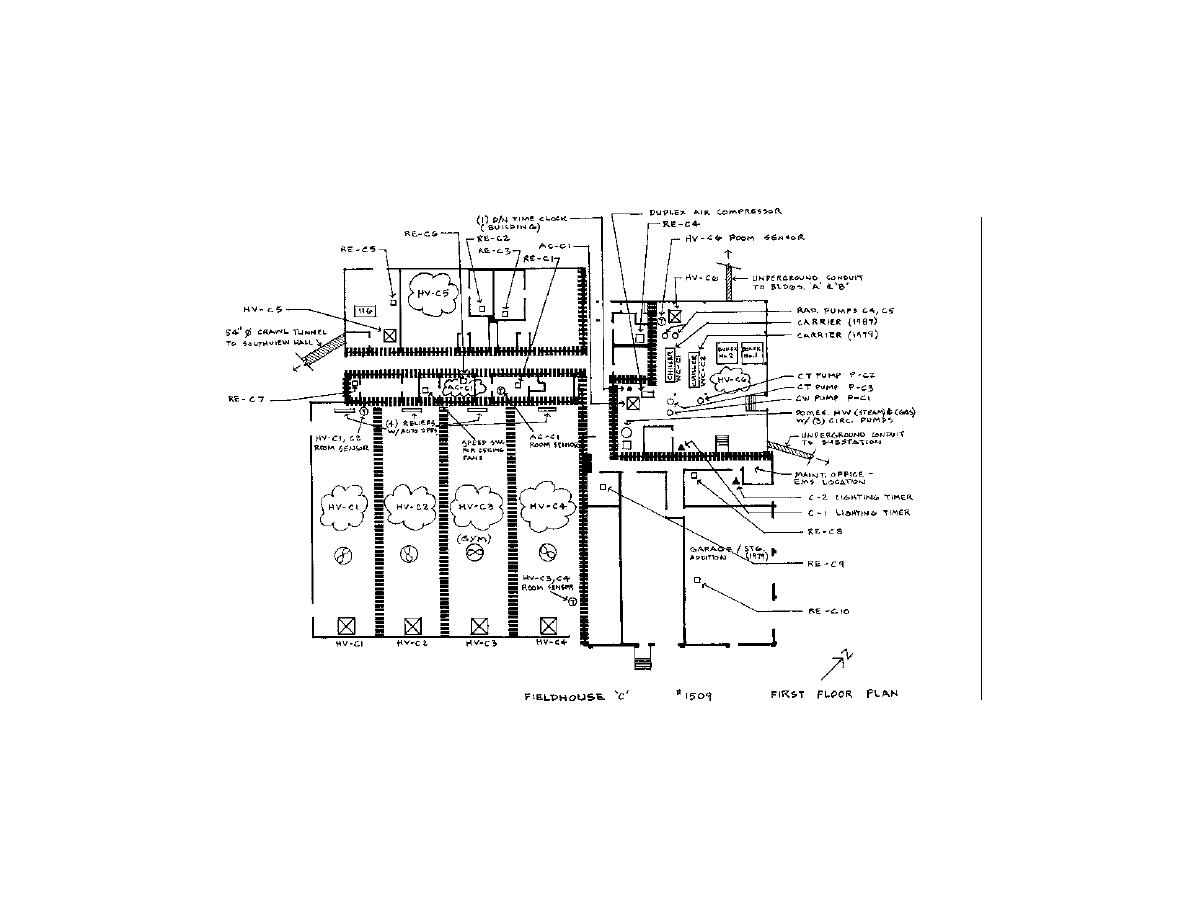
16-8. Floor Plan/Point Table Continued
©2002 by The Fairmont Press
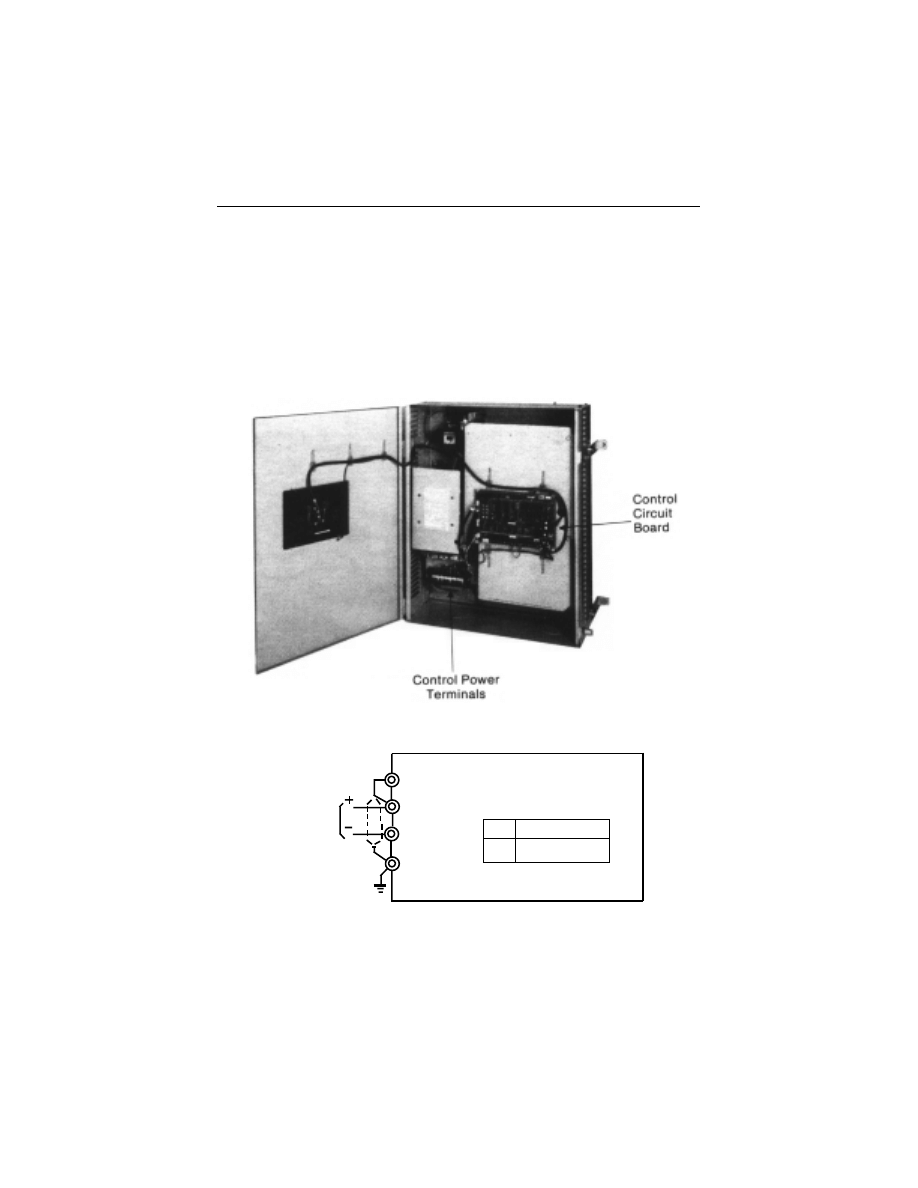
Installation details
are sometimes required for interfacing con-
nects to special equipment or as a guide for the proper hook-up of
equipment. Figure 16-8 shows how an existing variable speed drive is
wired and which terminals you desire the installer to connect to for the
4-20 mA control signal.
shows the correct and incorrect
methods of wiring a fan status point.
16-8. VSD Wiring Connections
VT 130H
Jumper
Position
JP9
“5V” side
JP10
Side with no
mark
REF
IRF
OV
4 – 20mADA
REF
©2002 by The Fairmont Press
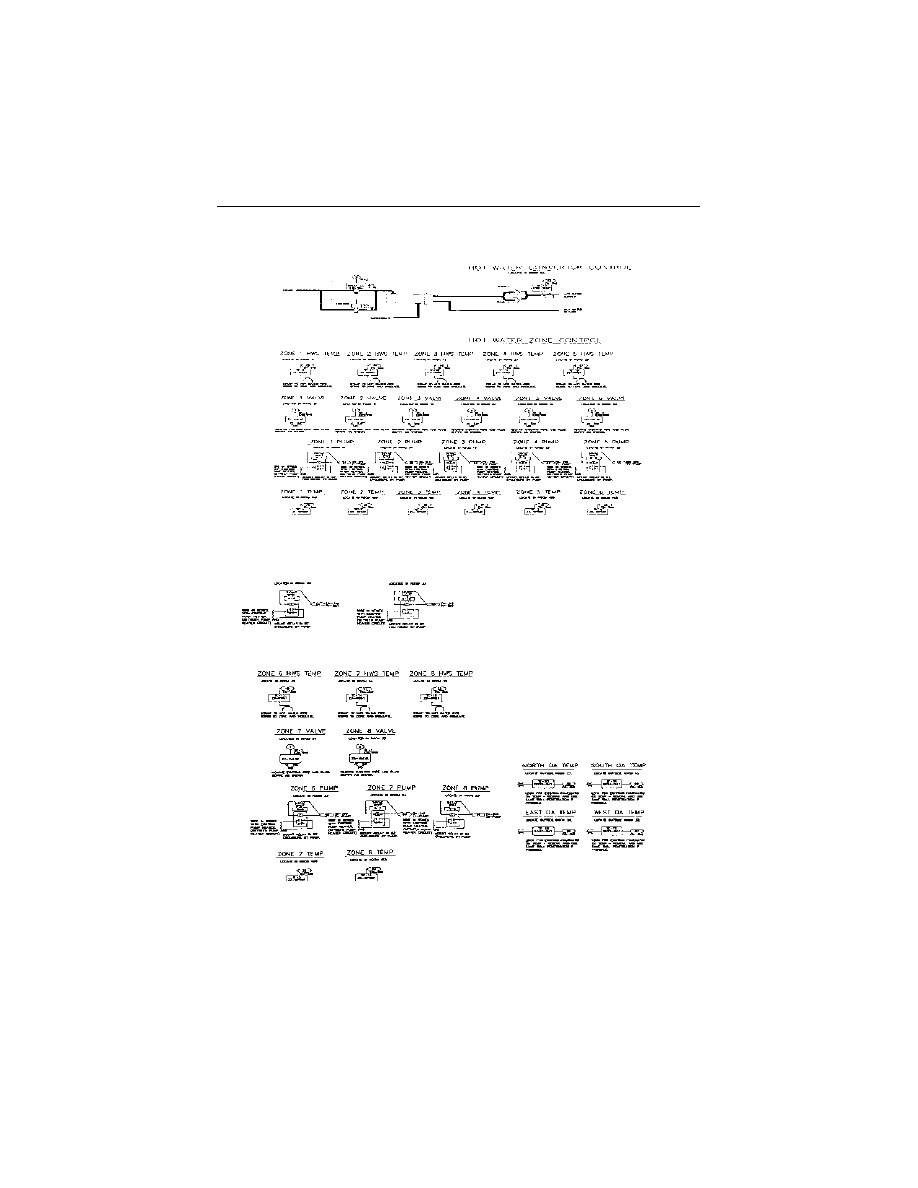
16-9. Fan Status Wiring
©2002 by The Fairmont Press

There are two basic methods of developing a final document for an
EMS: 1) Specification and 2) performance-based request for proposal.
With the request for proposal, a very general and sometimes vague
performance specification is written and vendors submit a detailed de-
scription and quotation of the EMS (as they interpret the specs) and all
of its components, both hardware and software, on which the proposal
is based. This process requires a panel of EMS experts to evaluate each
proposal to assure they are in compliance.
Developing a specification for a DDC EMS should result in:
1. State-of-the-art DDC system at a reasonable cost.
2. A user friendly and simple to operate system.
3. Reasonable time schedule for installation and start-up.
4. Adequate training for operators and maintenance personnel.
5. A smooth acceptance with both parties understanding conditions
for acceptance.
6. A good payback in energy and labor savings.
7. Improvement in comfort conditions for building occupants.
8. Easily serviced and maintained system.
9. A dependable and reliable system.
10. A system that is expandable.
The remainder of this section will address the DDC-EMS specifica-
tion.
The following is a sample table of contents of an EMS specification
with a brief comment on each section:
1. General (Scope of Work)
Briefly describe the project, reference existing conditions (items to
remove/remain), contractor to provide all material and labor, contractor
to visit site. (No additional compensation will be granted because of lack
of knowledge of existing conditions). Include on-site supervision,
weekly status report, and coordination with other traders.
©2002 by The Fairmont Press

2. Supporting Documents/Technical Proposal
Low bidder shall submit (1) copy within 5 days after bid: number
of similar EMSs in operation; (3) EMS owner names to contact; informa-
tion on local installers; detailed description of all EMS hardware and
software; UL evidence; describe future expansion capability; list prices
of all components; procedure to add/delete points; cost and breakdown
of (1) year service/maintenance contract; remote monitoring capability;
actual print-outs of summaries, logs and trend reports.
3. Codes and Permits
All work shall conform to local and national codes. Contractor
shall secure and pay for all permits, licenses, and certificates.
4. System Listing
EMS to conform to UL 916 (EMS) and fire ratings (if applicable).
5. Continuity of Service
Contractor shall maintain continuous services. (3) days notice if an
interruption is necessary. Existing controls and time clocks are not to be
disconnected until EMS is 100% operational.
6. Equipment Access
Install equipment for access to maintain and service.
7. Submittals and Shop Drawings
(4) copies of submittals required within (3) weeks of contract
award and are to include technical information, catalog cut sheets, in-
stallation drawings, wiring diagrams, and proposed layout. Submit a
construction schedule. Software programs to be reviewed before install-
ing same. Refer to
8. Delivery and Storage of Equipment
Indicate where and how all equipment is to be received and stored.
9. EMS Requirements
Describe in detail EMS central operator station, field panels, soft-
ware, input/output devices (sensors, relays, transducers), transmission
system, LANs, phone connections, portable devices.
©2002 by The Fairmont Press

10. Energy Management and Control Programs
Describe each application software program plus any special con-
trol strategy sequences.
11. Signal Protection
Describe method and ratings for lightning production, power
spikes, and brown-outs.
12. Wiring
Describe how and where wiring is to be performed including wir-
ing size, conduit requirements, wire molding, and any special circum-
stances.
13. Control Piping
Specific type of tubing (copper or fire-retardant polyethylene) and
how to install.
14. Manuals and Training
(4) sets of as-built control/wiring diagrams including connections
to existing equipment. Description narrative of sequence of control. In-
stallation drawings. Catalog data sheets on all hardware. Complete op-
erating instructions for entire EMS. Software manual and software flow
diagrams. Point list. Separate section on training to specify when, where,
who an how long training sessions are to be held. Include EMS start-up,
programming of software, how to add/delete a point, and system main-
tenance requirements.
15. Contract Completion and Guarantee
Describe all that is to be included in the warranty (adjustments,
programming, commissioning, and a written report of EMS status).
16. Compliance
If bidder is not in full compliance, a written document is to be
submitted with bid showing non-compliance items.
17. Drawings
EMS block diagram, site plan, floor plans with equipment loca-
tions, HVAC flow diagram.
18. Point Lists
Complete listing of input/output points with reference to special
circumstances (see
©2002 by The Fairmont Press
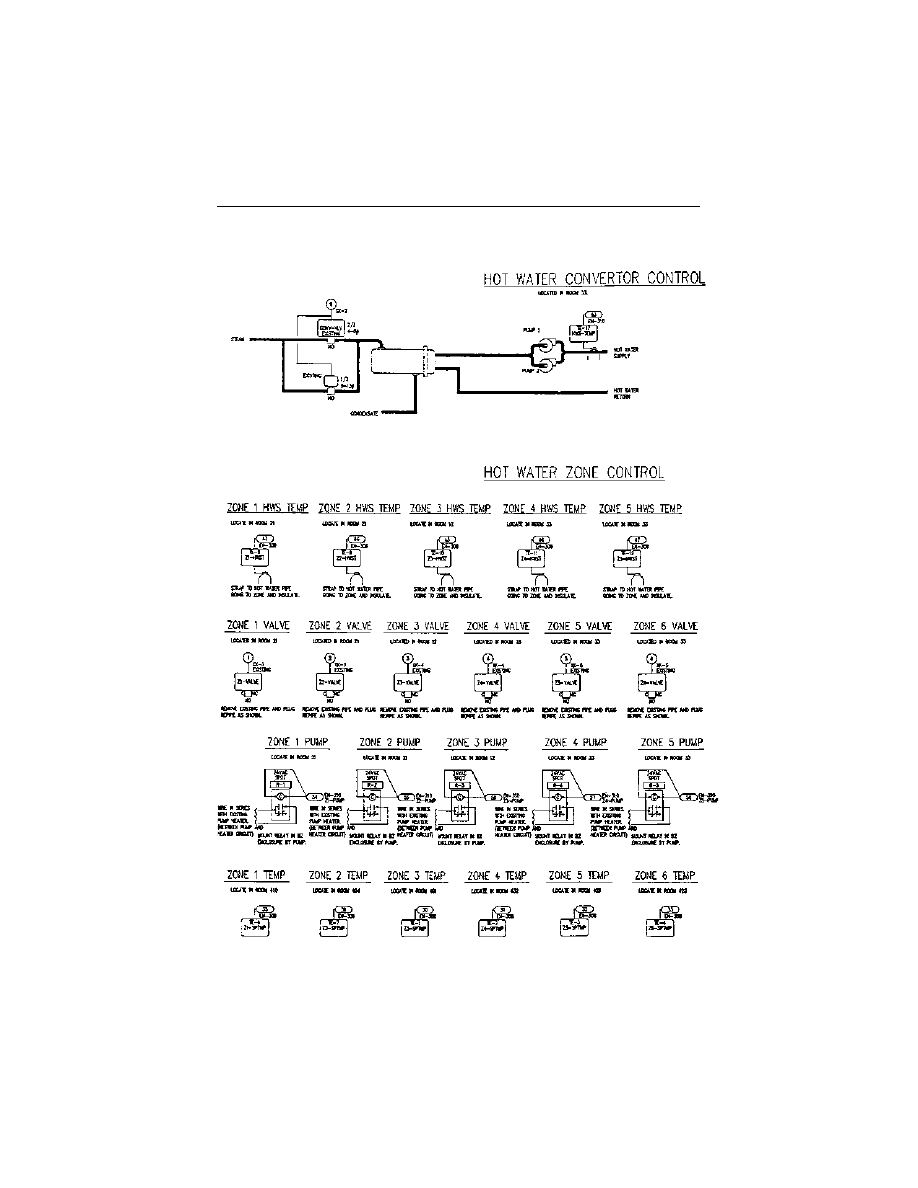
16-10. Zone Controls/Hardware
©2002 by The Fairmont Press
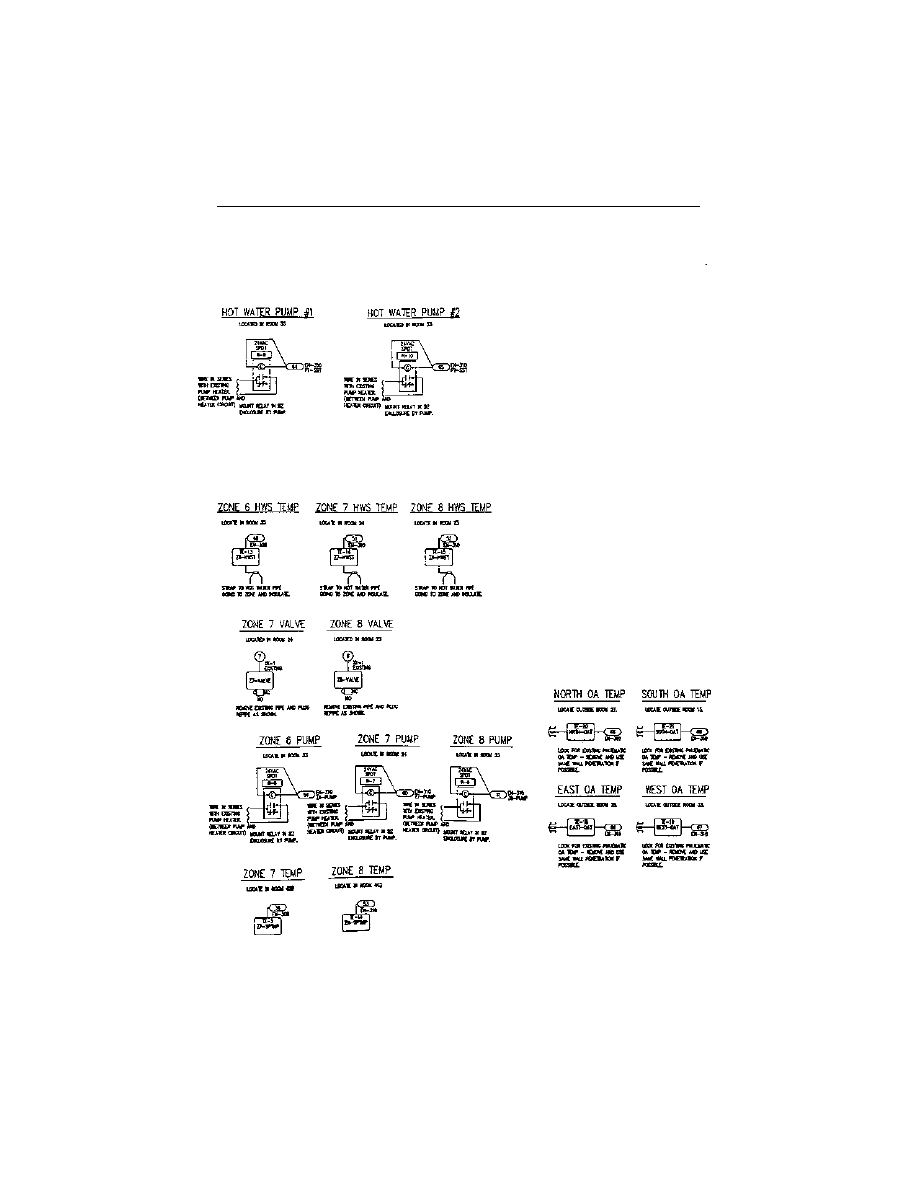
©2002 by The Fairmont Press
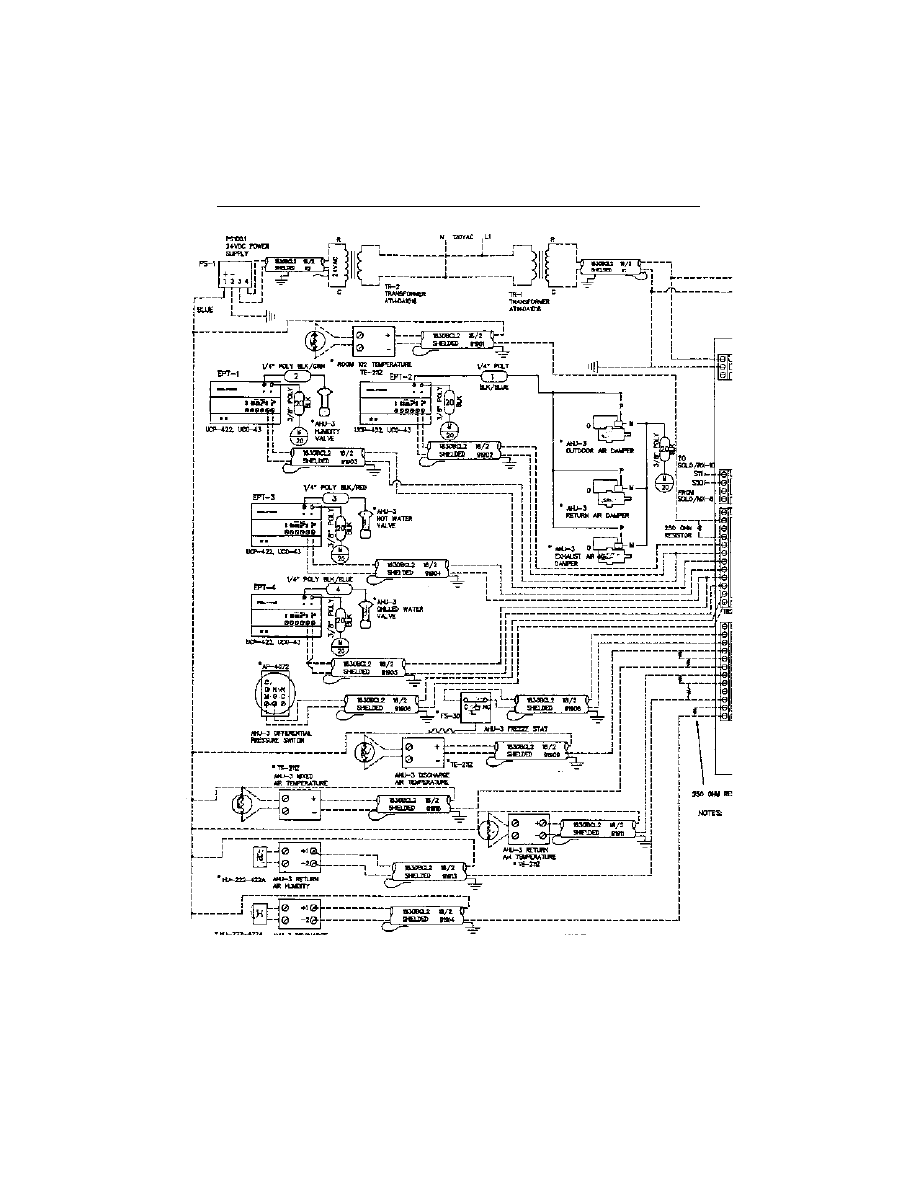
16-11. AH Unit/Wiring
©2002 by The Fairmont Press
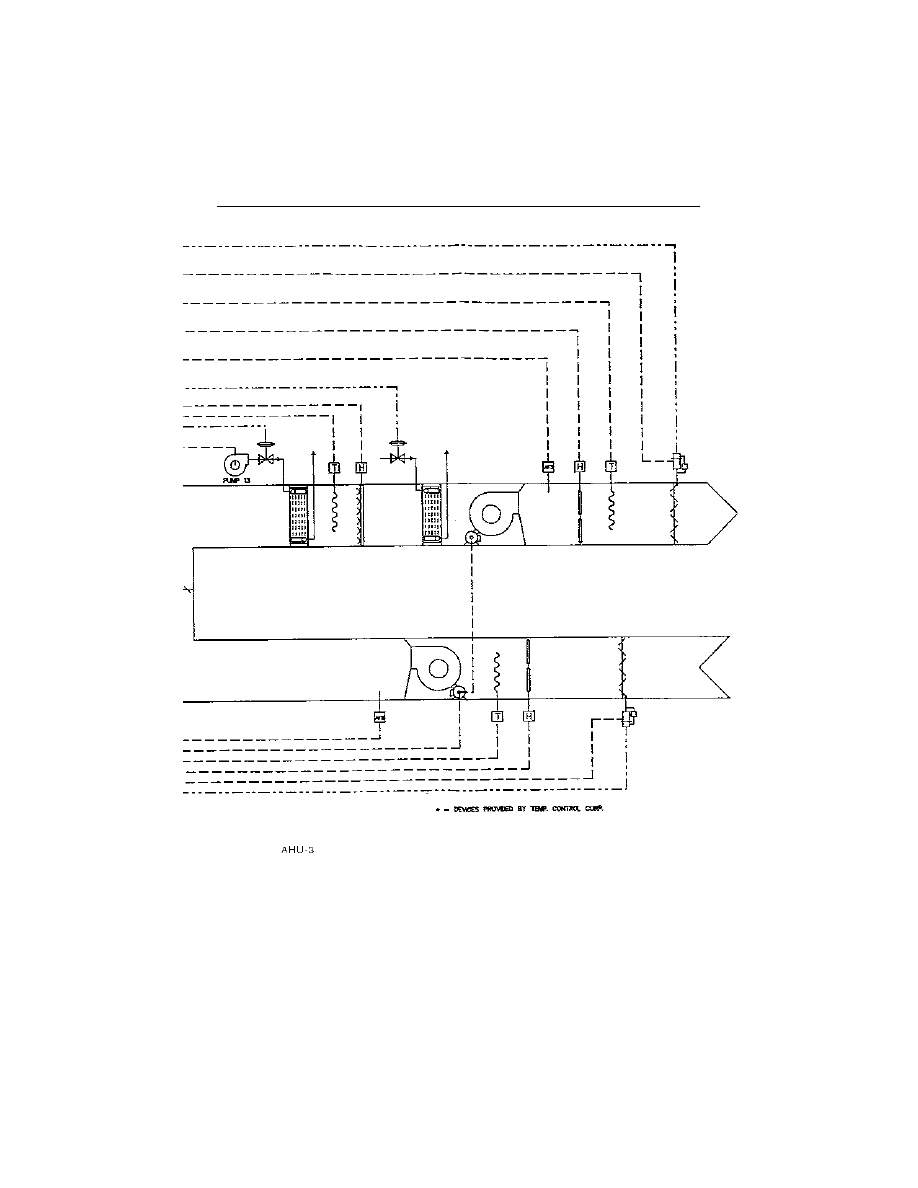
©2002 by The Fairmont Press
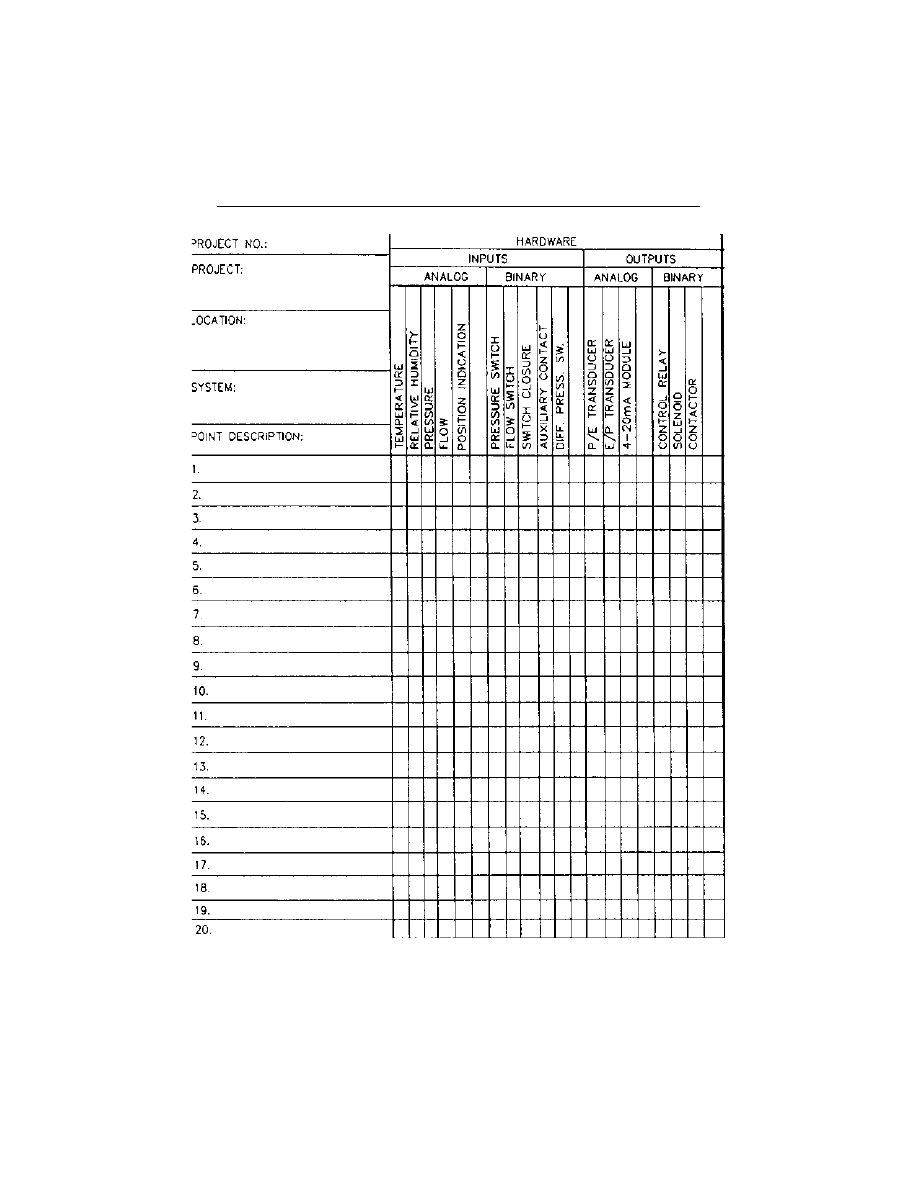
16-12. AH Unit/Hardware
©2002 by The Fairmont Press
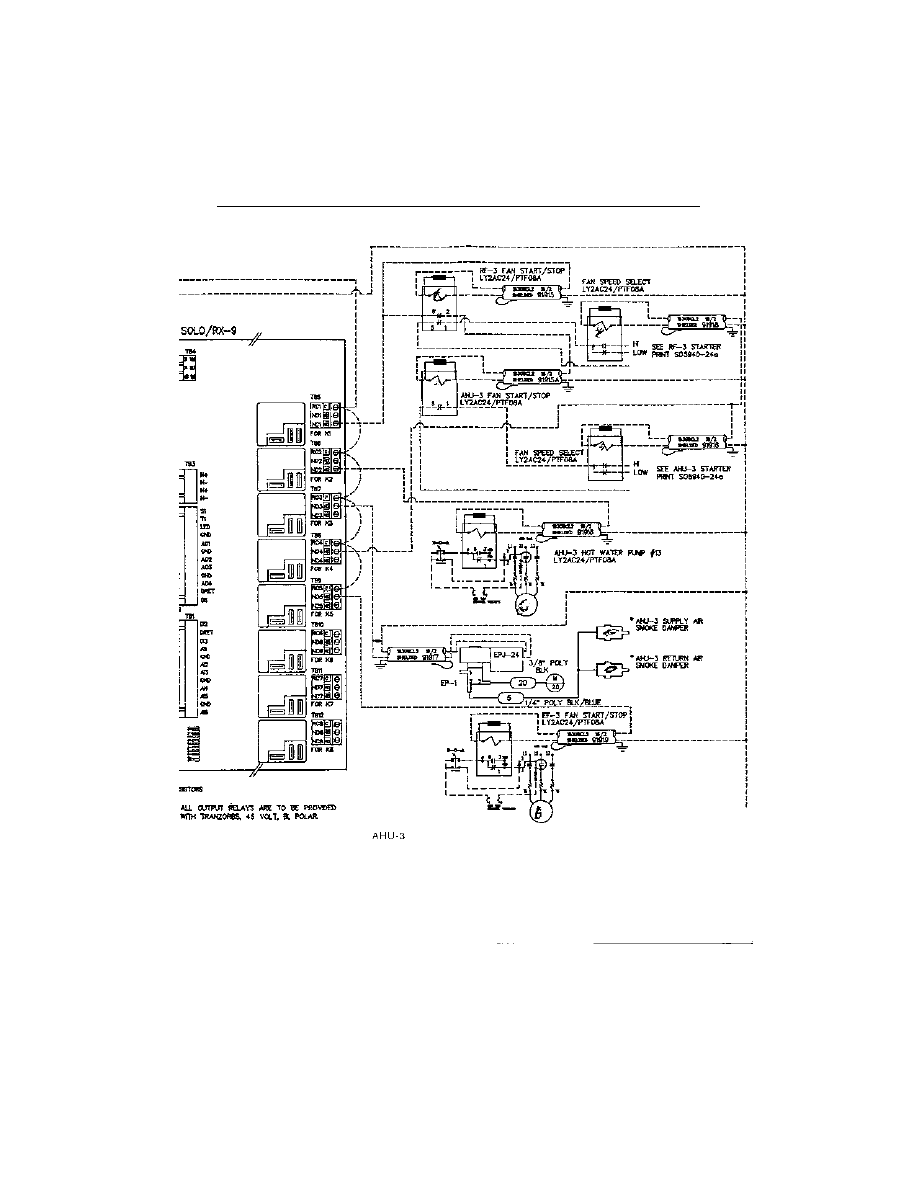
©2002 by The Fairmont Press
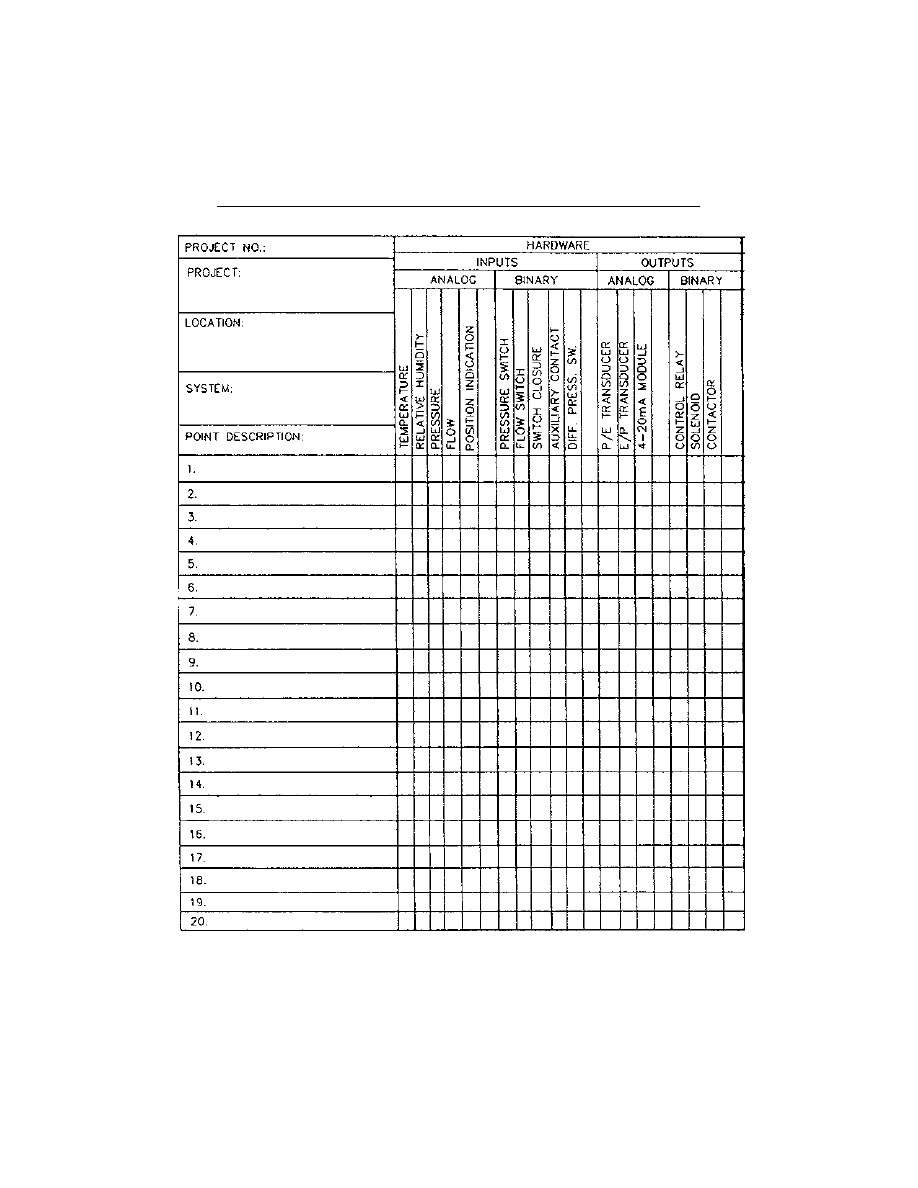
16-13. Point Table
©2002 by The Fairmont Press
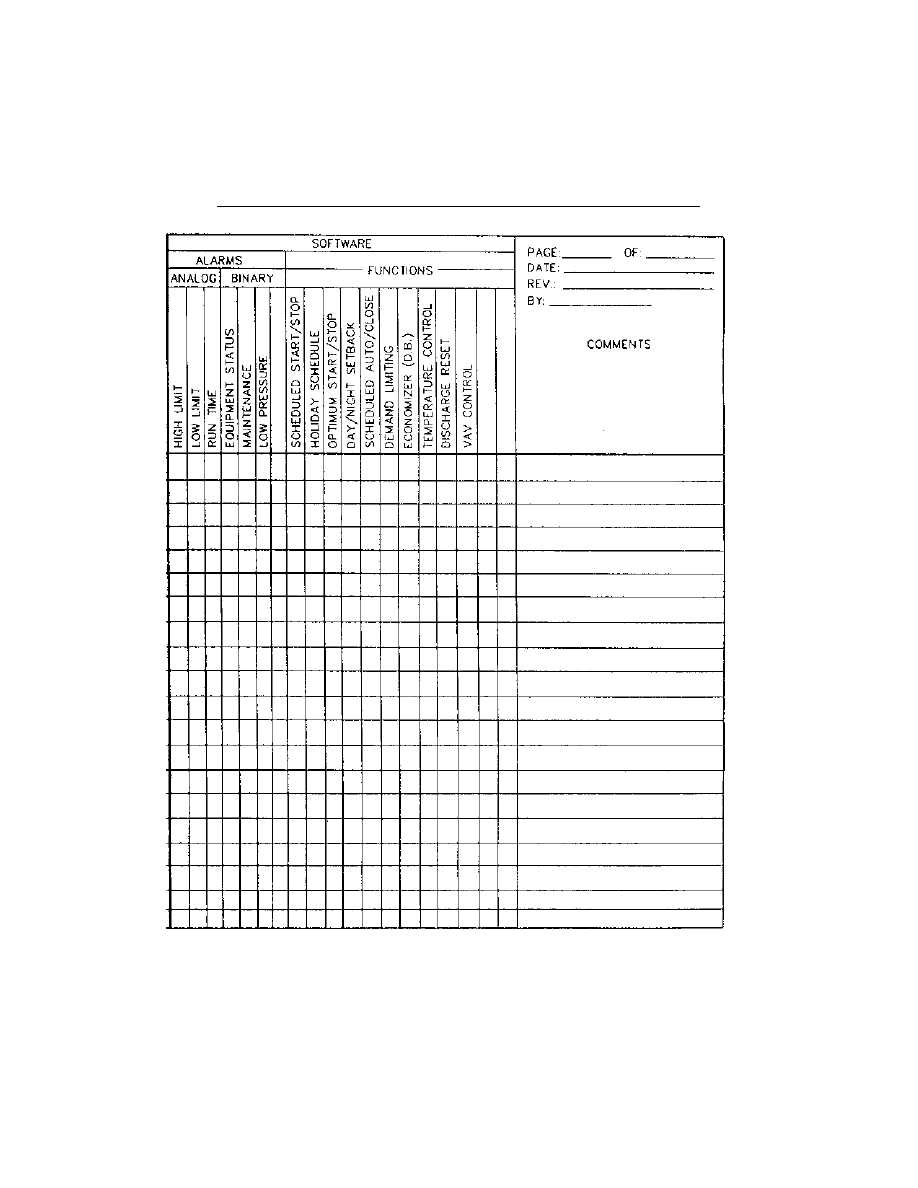
©2002 by The Fairmont Press

I
NTELLIGENT
B
UILDINGS
175
Chapter 17
Intelligent Buildings
he intelligent building is a concept which has received much
attention and promotion recently. Networks of sensors and
controls collect data about the building environment. Net-
works of computers and microprocessors use the information to adjust
the building to changing conditions. Smart systems aren’t brand new
but they are coming to play in more and more building types. The
broadest new market is likely to be in multi-tenant office buildings,
where on-site telecommunications, data-communications and office-au-
tomation services can be offered to tenants on a shared basis. But all
types of buildings can be enhanced by an electronic infrastructure from
libraries and banks to hotels and corporate headquarters.
One of these intelligent buildings is the $640 million headquarters
for the Hong Kong and Shanghai Banking Corp. completed in 1986. Its
5,000 sensor point electronic building management system is one of the
most comprehensive of its type.
Similar to the US intelligent building phenomenon, the bank’s elec-
tronics were central to its design. The system minimized building oper-
ating costs, ensures fast responses to crises and also makes mechanical
and electrical services adaptable to layout changes.
The 43-story building was designed by architect Foster Associates,
London, so that internal layouts can be changed easily to suit changing
T
©2002 by The Fairmont Press

computer needs. Different types of outlets for air, telecommunications
and power are built into an access floor with tiles that can be lifted and
moved for different layouts. Four mechanical service modules serve
each floor. These boxes stacked on either side of the building that con-
tain toilets, water storage and a local air conditioning plant. The mod-
ules are supplied from the central plant in the basement, which draws
in seawater for cooling and toilet flushing through a shaft and tunnel
from the nearby harbor.
The building management system played a part in commissioning
these decentralized mechanical service modules. The system connects
each service module and made commissioning easier.
A network of microprocessors, monitors and controls local equip-
ment. They are linked to central computers on the 27th floor and second
basement level. The network monitors 23 systems, including lighting,
HVAC, water supply, refuse disposal, fire, security and leak detection,
and it is programmed to run them economically and with minimum
personnel. The system also interfaces extras such as the seawater system
and automatic document delivery.
The system emphasizes energy management and will calculate
the efficiency of power use and highlight wasteful areas. There are
plans to use the system to control window blinds and to track the
sun with mirrors, scooping light into the building’s 170 ft. high
atrium.
The system also features a maintenance component run on a
separate minicomputer. The energy management system will drop off
pertinent data such as total running time of equipment, and the
maintenance system will be programmed to print out preventive
maintenance work orders. Work orders will include parts and tools
needed, time estimates and costs. If a work order is not acknowl-
edged as completed in a specified time, it will be repeated. The main-
tenance system will also maintain an inventory of the thousands of
spare parts for the building, which will have custom made compo-
nents from cladding to doorknobs. It will issue restock reminders
when stock is running low.
Sophisticated electronics make buildings intelligent. They may
not look much different from the outside. But interior design, wiring
systems, floor systems, telecommunications systems, lighting, controls
and installation techniques are changing. Even structural systems are
affected by heavy line loads from additional equipment. Floors may
©2002 by The Fairmont Press

need reinforcing to handle the approximately 80 psf live load re-
quired by computerization.
A new highly regarded player, the telecommunications consult-
ant is being added to the design team. Confused developers, not sure
that they need smart systems but afraid of being left with outmoded
space, are looking to designers and telecommunications consultants
for advice. One answer is flexibility. To avoid obsolescence and costly
retrofits, buildings of all types need to be designed so that electronics
can be added later, even if no one wants them now.
The physical changes in the building are subtle but elementary
to the success of the intelligent building. Simple things, like increas-
ing the size of the telephone closets, can become expensive to work
around if overlooked. More important things, such as accommodation
for extra live loads, can be dangerous if overlooked. Consultants rec-
ommend that clients build for a 100 psf live load throughout the
building, instead of the minimum 50 psf typically required by code.
Developers are told to bite the bullet and come up with a small
added cost premium. If we design according to code, we are design-
ing an obsolete building.
Flexible wiring schemes are also becoming crucial. The first
thing a developer planning an intelligent building should do is make
sure the designer plans for “a lot of conduit space and a lot of flex-
ibility.” Technology is making the need for the old “three pairs of
twisted wires” … the three simple two wire connections that in the
past were standard on all Bell office phones … obsolete. Current
multifunctioning systems take care of most needs with one pair of
twisted wire.
Raised floors, designed to offer flexibility, were once as high as
2 ft. They are now available in heights of 2 to 6 in. This saves added
floor-to-floor heights and curtain wall costs. Flat wiring, placed under
removable carpet tiles, is known for ease of installation, but isn’t as
easy to bend and install around corners. Electrified decking and
underfloor duct systems, both not new, are being used more and
more because they offer more outlets, which are required in offices
with automated work stations.
Consulting engineers have to take the computer and communi-
cation systems into account when sizing the mechanical systems.
Main computers give off so much heat that many designs call for re-
cycling it to other parts of the building in the heating months. Even
©2002 by The Fairmont Press

CRTs give off about three times as much heat as a person, says one
designer. Intelligent buildings typically have greater cooling require-
ments.
Smarter Still
Buildings may get even smarter in the future through integration
of processors, voice recognition and more extensive use of fiber-optic
networks.
In 1984 a fiber optic network cost about 50 cents per ft. compared
to 10 cents per ft for standard wiring. Connection charges, about $12 per
strand, were about $50 per strand three years ago. Some say, however,
that devices needed to move data on and off the fiber optic network still
add to costs. Fiber optic installation costs are coming down and techni-
cal wrinkles are being ironed out however. Another frontier is voice
recognition. The same type of processors that allow telephones to con-
vert analog voice patterns to digital signals could be used to allow the
building’s occupants to tell elevators what floor to go to or to turn up
the air volume in a room. Should the occupant say please? “It depends
how smart the building is.”
There are many technological developments that are changing the
ways of the HVAC controls industry.
1.
Unitary Controllers: Self-contained electronic (remote terminals
such as VAV boxes, reheat coils, and heat pumps). These control-
lers are an extension of DDC on central HVAC systems.
2.
Artificial Intelligence: A building that learns from its utility data,
which control strategies are most effective.
3.
Faster Graphics: If a problem occurs, such as a high temperature
alarm, most EMS operators will go directly to the real-time points
display. The primary reason is the amount of time it takes to pull
up a graphic display. Mouse-driven graphics will continue to im-
prove.
4.
Digital Electronics vs. Pneumatic Systems: In the 1990’s, even
though pneumatic actuators will still be in use, pneumatic control
systems will be replaced with electronic sensors and digital con-
trollers.
©2002 by The Fairmont Press

A
PPENDICES
179
Appendix
Glossary of Terms
Abort
: Premature termination of a program during execution.
AI
: Analog inputs.
Algorithm
: A set of well defined computer rules or procedures for solv-
ing a problem or providing an output from a specific set of inputs.
Ambient Temperature
: The temperature of the surrounding environ-
ment.
Analog
: An electrical input of a continuous range provided to the EMS
by a sensing device such as temperature, humidity, pressure, flow, etc.
(contrast with binary or digital).
Analog to Digital (A/D) Converter
: A circuit or device whose input is
information in analog form and whose output is the same information
in digital form.
ANSI (American National Standards Institute)
: The principal stan-
dards development body in the U.S.A. ANSI is a nonprofit, nongovern-
mental body supported by over 1000 trade organizations, professional
societies and companies. U.S.A.’s member body to ISO (International
Standards Organization).
©2002 by The Fairmont Press

AO
: Analog outputs.
Architecture
: The general organization and structure of hardware and
software.
ASCII
: American Standard Code for Information Interchange. Pro-
nounced asky. An 8-bit coded character set to be used for the general
interchange of data among information processing systems, communica-
tions systems, process control systems, and associated equipment.
Asynchronous Transmission
: Data transmission in which each charac-
ter contains its own start and stop bits.
Automatic Temperature Control (ATC)
: A local loop network of pneu-
matic or electric/electronic devices which are interconnected to control
temperature.
Automation
: Automatically controlled operation of an apparatus, pro-
cess, or system by mechanical or electronic devices that take the place of
human observation, effort, or decision.
Background Programming
: A feature of computer hardware to provide
a means of writing, testing, and debugging a software program on the
computer at the same time the computer is performing other “Real
Time” programs.
Basic
: An acronym for Beginners All-Purpose Symbolic Instruction
Code, a high-level, English-like programming language used for general
applications.
Bandwidth
: The difference, expressed in hertz (HZ), between the high-
est and lowest frequencies of a transmission channel.
Baud
: Unit of signaling speed. The speed in baud is the number of dis-
crete conditions or events per second. If each event represents only one
bit condition, baud rate equals bps. When each event represents more
than one bit (e.g. dibit), baud rate does not equal bps.
BI
: Binary inputs.
©2002 by The Fairmont Press

Binary
: Having only two conditions or values; no intermediate units,
e.g., on/off, maximum/minimum, open/close, etc. (contrast with ana-
log).
Bit
: An acronym for binary digit. The smallest unit of information which
can be represented. A bit may be in one or two states, represented by the
binary digits 0 and 1.
BPS (Bits per Second)
: The base unit of data-transmission rate. Kbps for
kilo (thousands of) bits per second; Mbps for mega (millions of) bits per
second.
BO
: Binary outputs.
Boostrap
: A technique or device designed to bring a computer into a
desired state by means of its own action.
Buffer
: A temporary data storage device used to compensate for a dif-
ference in data flow rate or event times, when transmitting data from
one device to another.
Bus
: A data path shared by many devices (e.g. multipoint line) with one
or more conductors for transmitting signals, data, or power. In LAN
technology, a bus is a type of linear network topology.
Byte
: A binary element string functioning as a unit, usually shorter than
a computer “word.” Eight-bit bytes are most common. Also called a
“character.”
Cathode-Ray Tube (CRT)
: A vacuum tube in which cathode rays are
projected on a fluorescent screen to produce a luminous spot.
Central Memory
: Core or semiconductor memory which communicates
directly with a CPU.
Central Communication Controller (CCC)
: A computer that performs
data gathering and dissemination from and to remote panels, as well as
providing limited backup to the CCU.
©2002 by The Fairmont Press

Central Processing Unit (CPU)
: The portion of a computer that per-
forms the interpretation and execution of instructions. It does not in-
clude memory or I/O bus.
Central Control Unit (CCU)
: A process control digital computer that
includes a CPU, central memory, and I/O bus.
Character
: One of a set of elementary symbols which normally include
both alpha and numeric codes plus punctuation marks and any other
symbol which may be read, stored, or written.
Chiller Optimization
: An energy management application program that
resets chilled and condenser water temperatures and selects and load/
unloads chillers to provide necessary cooling at minimum cost.
Clock
: A device or a part of a device that generates all the timing pulses
for the coordination of a digital system. System clocks usually generate
two or more clock phases. Each phase is a separate, square wave pulse
train output.
Closed Loop
: A control and sensing device combination in which a
process variable is measured, compared with a desired value (or set-
point) and a correctional value is calculated for output to the controlling
device (See “PID Control” below.)
Coaxial Cable
: A transmission medium usually consisting of one central
wire conductor surrounded by a electric insulator and enclosed in either
a wire mesh or an extruded metal sheathing.
Communications Protocol
: The rules governing the exchange of infor-
mation between devices on a data link.
Compiler
: A language translator which converts source statements writ-
ten in a high level language into multiple machine instructions. A com-
piler translates the entire program before it is executed.
Controller
: An instrument that measures a controlled variable, compares
the data with a desired value, and issues a signal for corrective action.
©2002 by The Fairmont Press

Control Point Adjustment (CPA)
: The procedure of changing the oper-
ating point of a local loop controller from a remote location.
Control Sequence
: Equipment operating order established upon a cor-
related set of data environment conditions.
Crash
: An ungraceful system shutdown caused by a hardware or soft-
ware malfunction.
Crowbar
: An electronic circuit which can rapidly sense an over voltage
condition and provide a solid-state low impedance path to eliminate this
transient condition.
Data Environment (DE)
: The sensors and control devices connected to
a single building field panel from the equipment and systems sampled
or controlled.
Data Transmission Media (DTM)
: Transmission equipment including
cables and interface modules (excluding MODEMs) permitting trans-
mission of digital and analog information.
Deck
: In HVAC terminology, the air discharge of the hot or cold coil in
a duct serving a conditioned space.
Demand
: The term used to describe the maximum rate of use of electri-
cal energy averaged over a specific interval of time and usually ex-
pressed in kilowatts.
Demand Limiting
: A technique to reduce demand by measuring incom-
ing electrical power and turning-off specified loads so as to keep the rate
of electrical usage under a preset level.
Demultiplexer
: A device used to separate two or more signals previ-
ously combined by compatible multiplexer for transmission over a
single circuit.
D (Derivative)
: Rate (speed) at which the proportional error is changing.
Anticipates.
©2002 by The Fairmont Press

Diagnostic Program
: Machine-executable instructions used to detect
and isolate component malfunctions.
Direct Digital Control (DDC)
: Sensing and microprocessor Control of
processes directly with digital control electronics.
Digital to Analog (D/A) Converter
: A hardware device which converts
a digital signal into a voltage or current proportional to the digital input.
Disk Storage
: A bulk storage, random access device for storing digital
information. Usually constructed of a thin rotating circular plate having
a magnetizable coating, a read/write head and associated control equip-
ment.
Distributed Processing System
: A system of multiple processors each
performing its own task, yet working together as a complete system
under the supervision of a central computer, to perform multiple asso-
ciated tasks.
Download
: The transfer of digital data or programs from a host com-
puter to another data processing system such as central computer to
microcomputer.
Duty Cycling
: The process of turning off electrical equipment for prede-
termined short periods of time to reduce consumption and demand.
EIA (Electronic Industries Association)
: A standards organization in the
U.S.A. specializing in the electrical and functional characteristics of in-
terface equipment.
EIA-485
: The recommended standard of the Electronic Industry Associa-
tion that specifies the electrical characteristics of generators and receiv-
ers for use in balanced digital multipoint systems (Also RS-485).
Executive Software
: The main system program designed to establish
priorities and to process and control other programs.
Fiber Optics
: Transmission technology in which modulated light wave
signals, generated by a laser or LED, are propagated along a glass or
©2002 by The Fairmont Press

plastic medium, and then demodulated to electric signals by a light
sensitive receiver.
Firmware
: A computer program or software stored permanently in
PROM or ROM or semipermanently in EPROM. It performs the same
function as software, but is in hardware form. Firmware is loaded into
the equipment either at the time it is manufactured or later for
preprogrammed controllers.
Fortran
: An acronym for FORmula TRANslation. A high-level, English-
like programming language used for technical applications.
Gateway
: A network station that serves to interconnect two otherwise
incompatible networks, network nodes, subnetworks, or devices; per-
forms protocol-conversion operation across numerous communications
layers.
Handshaking
: Exchange of predetermined signals between two devices
establishing a connection. Usually part of a communications protocol.
Hardware
: Physical equipment used in a computer system, as opposed
to “software.”
Initialize
: To set counters, switches, and addresses to zero or other start-
ing values at the beginning of or at prescribed points in a computer
program.
Input/Output (I/O) Device
: Digital hardware that transmits or receives
data.
I (Integral)
: Sum of error over time. Correction.
Interactive
: Functions performed by an operator with the machine
prompting or otherwise assisting these endeavors, while continuing to
perform all other tasks as scheduled.
Interpreter
: A language translator which converts individual source
statements into machine instruction by translating and executing each
statement as it is encountered.
©2002 by The Fairmont Press

Interrupt
: An external or internal signal requesting that current opera-
tions be suspended to perform more important tasks.
Large Scale Integration (LSI)
: The technology of manufacturing inte-
grated circuits capable of performing complex functions. Devices of this
class contain 100 or more logic gates.
LED (Light-Emitting Diode)
: A semiconductor light source that emits
visible light or invisible infrared radiation.
Line Conditioning
: Electronic modification of the characteristic re-
sponse of a line to meet certain standards. The characteristics include
frequency response, signal levels, noise suppression impedance, and
time delay.
Line Driver
: A hardware element which enables signals to be directly
transmitted over circuits to other devices some distance away.
Local Area Network (LAN)
: A data-communications system confined to
a limited geographic area (up to 6 miles or about 10 kilometers) with
moderate to high data rates (100 Kbps to 50 Mbps). The area served may
consist of a single building, a cluster of buildings, or a campus-type
arrangement. The network uses some type of switching technology, and
does not use common carrier circuits although it may have gateways or
bridges to other public or private networks.
Local Loop Control
: The controls for any system or subsystem which
exist prior to the installation of an EMS and which will continue to
function when the EMS is non-operative.
Machine Language
: The binary code corresponding to the instruction
set of the CPU.
Memory
: Any device that can store logic 1 and logic 0 bits in such a
manner that a single bit or group of bits can be accessed and retrieved.
Memory Address
: A binary number that specifies the precise memory
location of a stored word.
©2002 by The Fairmont Press

Microcomputer
: A computer system based on a microprocessor and
containing all the memory and interface hardware necessary to perform
calculations and specified transformations.
Microprocessor
: A single chip central processing unit fabricated as one
integrated circuit.
MODEM
: An acronym for MOdulator/DEModulator. A device used to
convert serial digital data from a transmitting terminal to a signal suit-
able for transmission over a telephone channel, or to reconvert the trans-
mitted signal to serial digital data for acceptance by a receiving terminal.
Multi-Tasking
: The procedure allowing a computer to perform a num-
ber of programs simultaneously under the management of the operating
system.
Nanosecond
: One billionth of a second.
Node
: A point of interconnection to a network. Normally, a point at
which a number of terminals or tail circuits attach to the network.
Non-Volatile Memory
: Memory which retains information in the ab-
sence of applied power (i.e. magnetic core, ROM, and PROM).
Open Loop
: A control system in which no comparison is made between
the actual value and the desired value of a process variable.
Operating System
: A complex software system which manages the com-
puter and its components and allows for human interaction.
Optical Isolation
: Electrical isolation of a portion of an electronic circuit
by using optical semiconductors and modulated light to carry the signal.
Optimum Start/Stop
: A form of control that automatically adjusts the
programmed start/stop schedule, depending on inside and outside air
temperature, in order to reduce equipment run-time while maintaining
building comfort conditions at occupancy.
PASCAL
: A “structured programming” high level computer language.
©2002 by The Fairmont Press
Peer-to-Peer Network
: A term to describe the communication interlink
between Field Control Units. The network is used solely for communi-
cation between FCUs and supports a token-passing protocol.
PID
: Term for traditional analog action: proportional—integral—deriva-
tive. This method of controlling and output based upon a calculated
error between the sensed reference variable and predetermined setpoint.
Point, Physical
: An individual monitor, control, or sensing device con-
nected to an EMS. The total number of points is a measure of the size
of an EMS.
Point, Pseudo
: A value or status created by a program and treated by
the system as a physical point.
Predictor/Corrector Program
: Applications software which allows con-
tinuous prediction of a future value and subsequent correction based on
actual measurements.
Program
: A sequence of instructions causing the computer to perform a
specified function.
PROM (Programmable Read Only Memory)
: Nonvolatile memory chip
that allows a program to reside permanently in a piece of hardware.
Protocol
: A formal set of conventions governing the formatting and rela-
tive timing of message exchange between two communicating systems.
P (Proportional)
: The offset (difference between setpoint and control
point). Error measurement.
RAM (Random Access Memory)
: Semiconductor read/write volatile
memory. Data stored is lost if power is turned off.
ROM (Read-Only Memory)
: Nonvolatile semiconductor memory
manufactured with predefined data content, permanently stored.
ROM, PROM, EPROM, EEPROM
: Read-Only Memory, Programmable
ROM, Erasable PROM, Electronically Erasable PROM. All are non-vola-
©2002 by The Fairmont Press

tile semiconductors memory.
Real Time
: A situation in which a computer monitors, evaluates, reaches
decisions, and effects controls within the response time of the fastest
phenomenon.
Real Time Clock
: A timing device used by a microprocessor to derive
elapsed time between events and to control processing of time-initiated
event data.
Register
: A digital device capable of retaining information.
Resistance Temperature Detector (RTD)
: A device where resistance
changes linear as a function of temperature.
RS-232
: Interface between data terminal equipment and data communi-
cation equipment, employing serial binary data interchange.
RS-422
: Electrical characteristics of balanced-voltage digital interface
circuits.
RS-423
: Electrical characteristics of unbalanced-voltage digital interface
circuits.
RS-449
: General-purpose 37-pin and 9-pin interface for data terminal
equipment and data circuit-terminating equipment, employing serial
binary data interchange.
RS-485
: See EIA-485.
Shielding
: Protective covering that eliminates electromagnetic and radio
frequency interference.
Software
: A computer program or set of programs held in some storage
medium and loaded into read/write memory (RAM) for execution
(Compare with firmware and hardware.).
Throughput
: The total capability of equipment to process or transmit
data during a specified time period.
©2002 by The Fairmont Press

Token-Passing
: The transferal of command of the communications net-
work from FCU to FCU on a data highway, enabling the holder of the
token to initiate transaction. It is a sequence of interchanges of link
codes.
Trunk
: A single circuit between two points, both of which are switching
centers or individual distribution points. A trunk usually handles many
channels simultaneously.
Volatile Memory
: A semiconductor device in which the stored digital
data is lost when power is removed.
Zone
: An area composed of a building, a portion of a building, or a
group of buildings affected by a single device or piece of equipment.
©2002 by The Fairmont Press

A
PPENDICES
199
References
TEXTBOOKS
The Energy Management System Sourcebook, Fairmont Press, 1985
Understanding Data Communications, Howard W. Sams & Co., 1988
Strategic Planning and Energy Management, Journal, 1988, 1989
Understanding Building Automation Systems, R. S. Means Co., Inc., 1991
HVAC Systems—Operation, Maintenance, & Optimization, Prentice-Hall,
Inc., 1992
MONTHLY MAGAZINES
ASHRAE Journal, Atlanta, Georgia
Heating Piping, Air Conditioning, Penton Publishing, Inc., Cleveland,
Ohio
Lan Technology, M&T Publishing, Inc., Redwood City, California
Consulting—Specifying Engineer, The Cahners Publishing Co., Newton,
Maine
Energy User News, Fairchild Publications, New York, New York
©2002 by The Fairmont Press
Force
Pound (force) (lb)
Newtons (N)
4.4482
——————————————————————————————————————————————————
Inches (in.)
Millimeters (mm)
25.4000
Length
Inches (in.)
Centimeters (cm)
2.5400
Feet (ft.)
Centimeters (cm)
30.4800
Feet (ft.)
Meters (m)
0.3048
——————————————————————————————————————————————————
Mass** (Weight)
Pound (lb.)
Kilogram (kg)
0.4536
——————————————————————————————————————————————————
Power
Btu per hour (Btu/hr.)
Watts (W)
0.2020
Horsepower (H.P.)
Watts (W)
746.0000
——————————————————————————————————————————————————
Pressure (Stress)
Pounds per square inch (PSI)
Kilopascals (kPa)
6.8947
Inches of water (“W.G.) @ 60
°
F
Pascals (Pa)
248.84
Inches of mercury (“Hg) @ 60
°
F
Pascals (Pa)
3376.85
——————————————————————————————————————————————————
Temperature
Degrees Fahrenheit (
°
F)
Degrees Celsius (
°
C) F = (TC+32)
×
1.8
tc =
t
F
± 32
1.8
Degrees Fahrenheit (
°
F)
Kelvin (K)
t
K
=
t
F
+ 459.67
1.8
——————————————————————————————————————————————————
(Continued)
©2002 by The Fairmont Press

Metric Conversion Guide (Continued)
——————————————————————————————————————————————————
Quantity
To Convert From
To
Multiply By
——————————————————————————————————————————————————
Torque (Bending)
Pound force – inch (lb.-in.)
Newton-Meter (Nm)
0.1129
Pound force – foot (lb.-ft.)
Newton-Meter (Nm)
1.3558
——————————————————————————————————————————————————
Feet per second (ft./sec.)
Meters per second (m/s)
0.3048
Velocity
Feet per minute (ft./min.)
Meters per second (m/s)
5.0800
×
10
3
Miles per hour (mph)
Meters per second (m/s)
0.4470
——————————————————————————————————————————————————
Cubic inches (in.
3
)
Cubic centimeters (cm
3
)
16.3871
Volume
Cubic feet (ft.
3
)
Cubic meters (m
3
) = Stere
2.8317
×
10
2
Gallons U.S. (gal.)
Cubic meters (m
3
) = Stere
3.7854
×
10
3
Oz (U.S. Fluid)
Cubic Meters (m
3
) = Stere
2.9573
×
10
5
——————————————————————————————————————————————————
Work (Energy)
Btu (Btu)
Kilojoule (kJ)
1.0551
Foot pound (ft.-lb.)
Joule (J)
1.3558
Watt-hour (W-hr.)
Kilojoule (kJ)
3.6000
——————————————————————————————————————————————————
* Since standard and normal cubic meters (STD m
3
and Nm
3
) do not have a universally accepted definition, their reference
pressure and temperature should always be spelled out.
** In commercial and everyday use, the term weight almost always means mass.
©2002 by The Fairmont Press
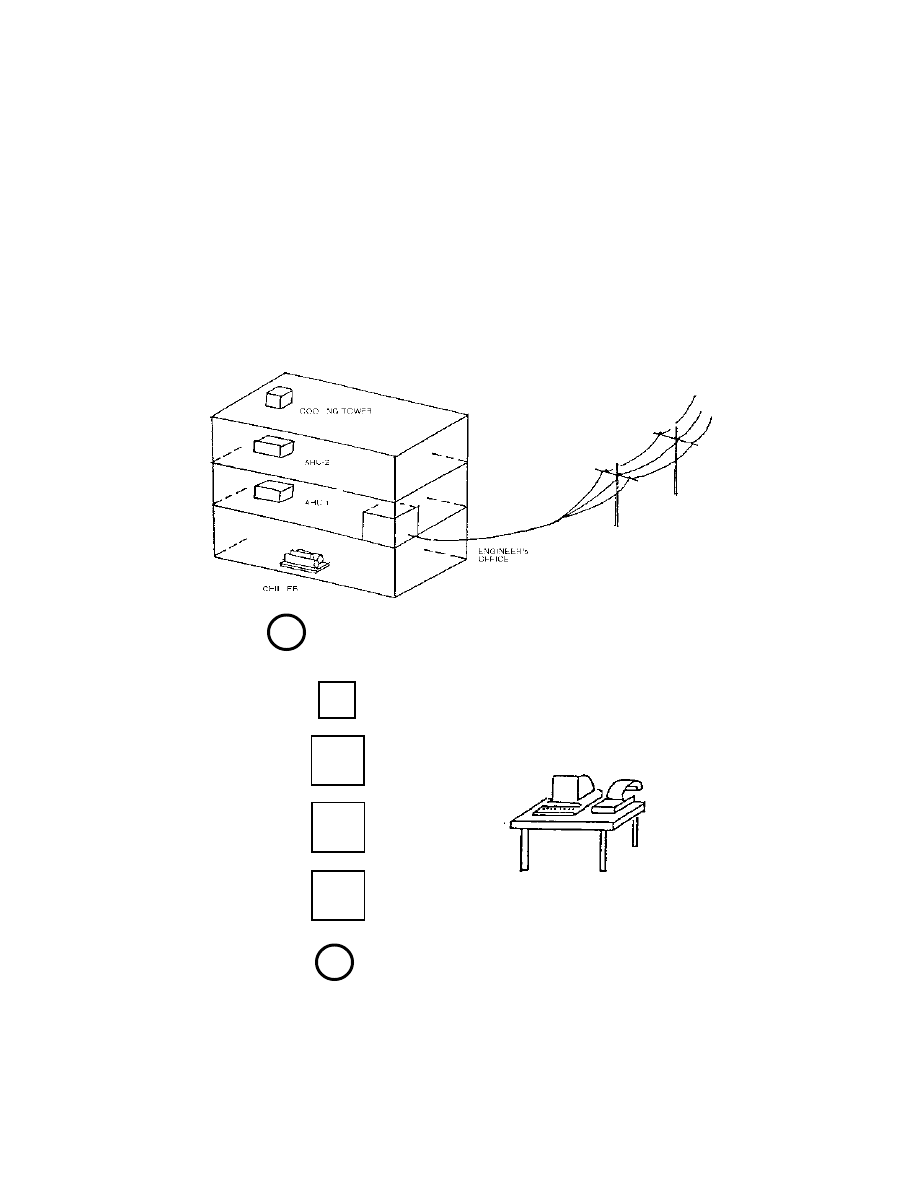
Figure F-1. Building/HVAC Equipment
Figure F-2. Block Diagram
Sample EMS Problem
1
2
C.T.
AHU-2
AHU-1
CHILLER
©2002 by The Fairmont Press
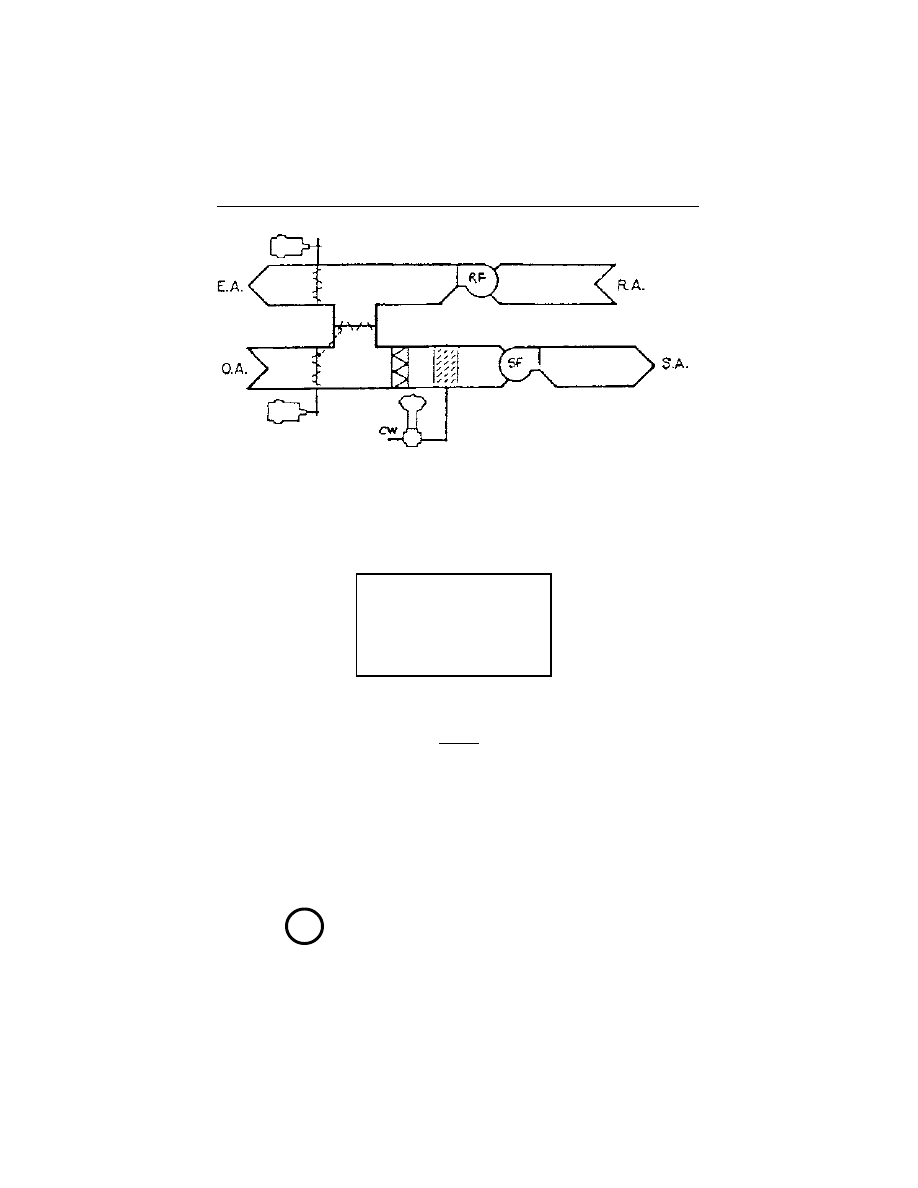
Figure F-3. AHU-1 and AHU-2
3
Single line, show sensors, relays, switches, control lines, wiring.
Electronic sensors.
Pneumatic actuators.
SF/RF: electric interlock.
DDC PANEL
Specs
SF: scheduled start-stop, status, run time
RF: status, run time
Mixed air: damper control, low limit, enthalpy control
Discharge air: cooling coil control, high limit
Return air: temp., humidity
Outside air: temp., humidity
Space temp.
©2002 by The Fairmont Press
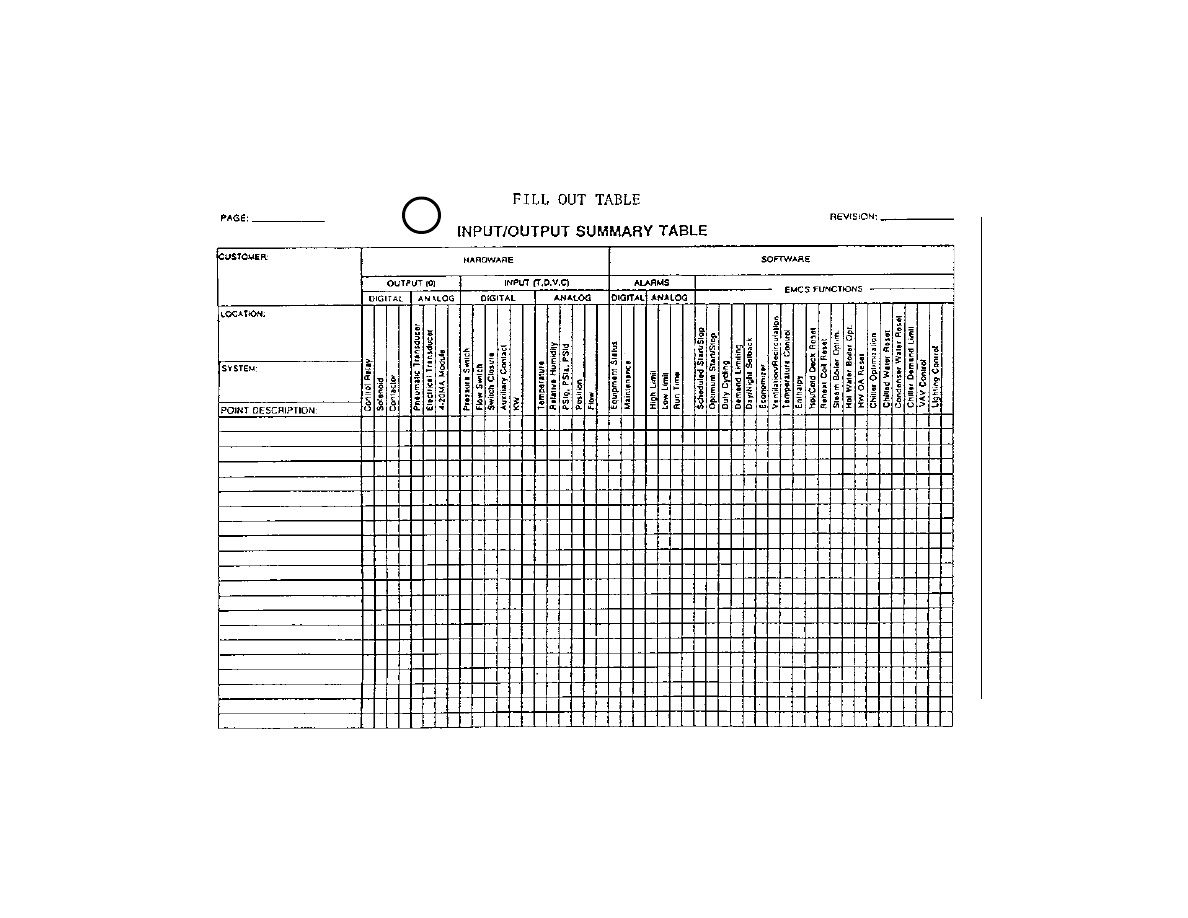
4
©2002 by The Fairmont Press
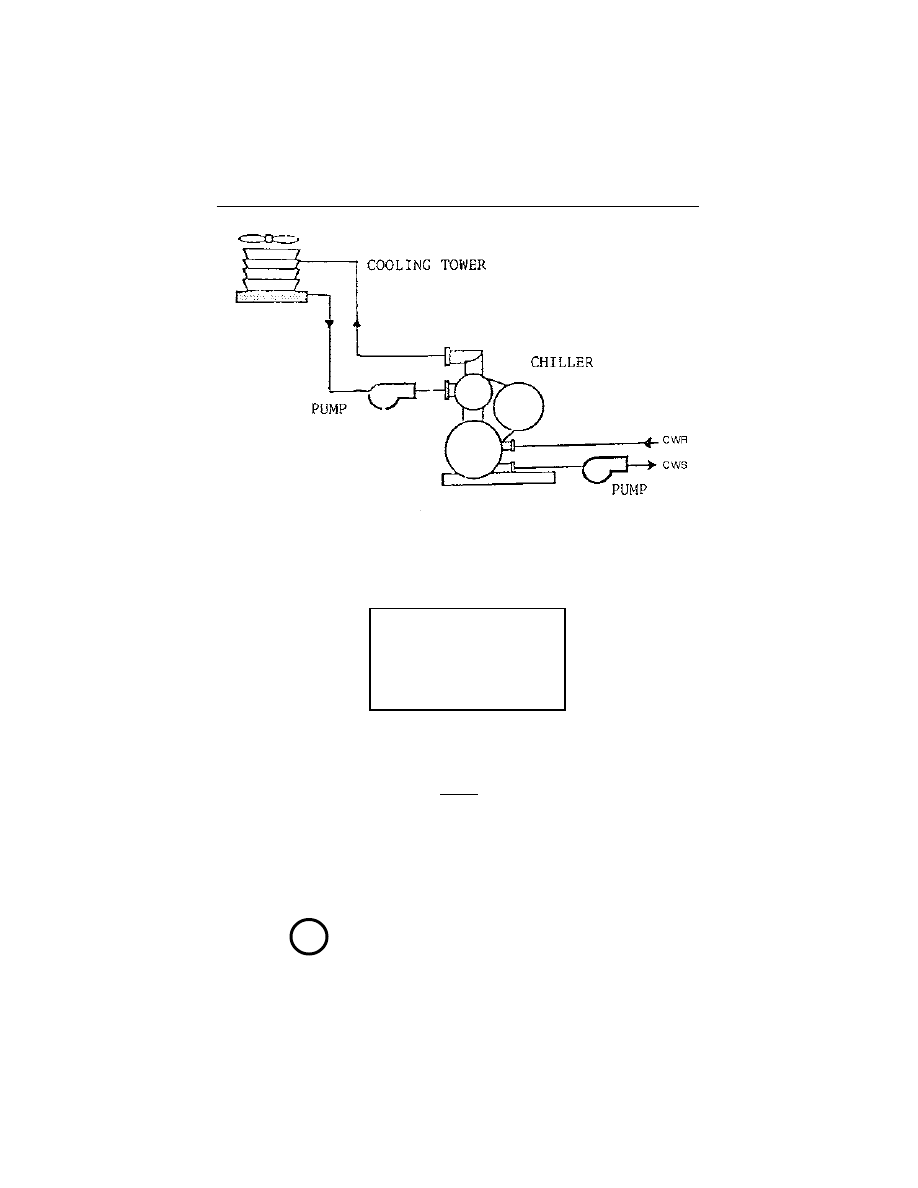
Figure F-4. Chiller System
Single line, show sensors, relays, switches, wiring.
Electronic sensors.
Pumps/chiller interlocked.
5
Specs
CW Pump: start-stop, status, run time
Cond. W Pump: status, run time
Chiller: status, run time
CWS, CWR, COND WS & R: temp.
CT Fan: status, run time
DDC PANEL
©2002 by The Fairmont Press
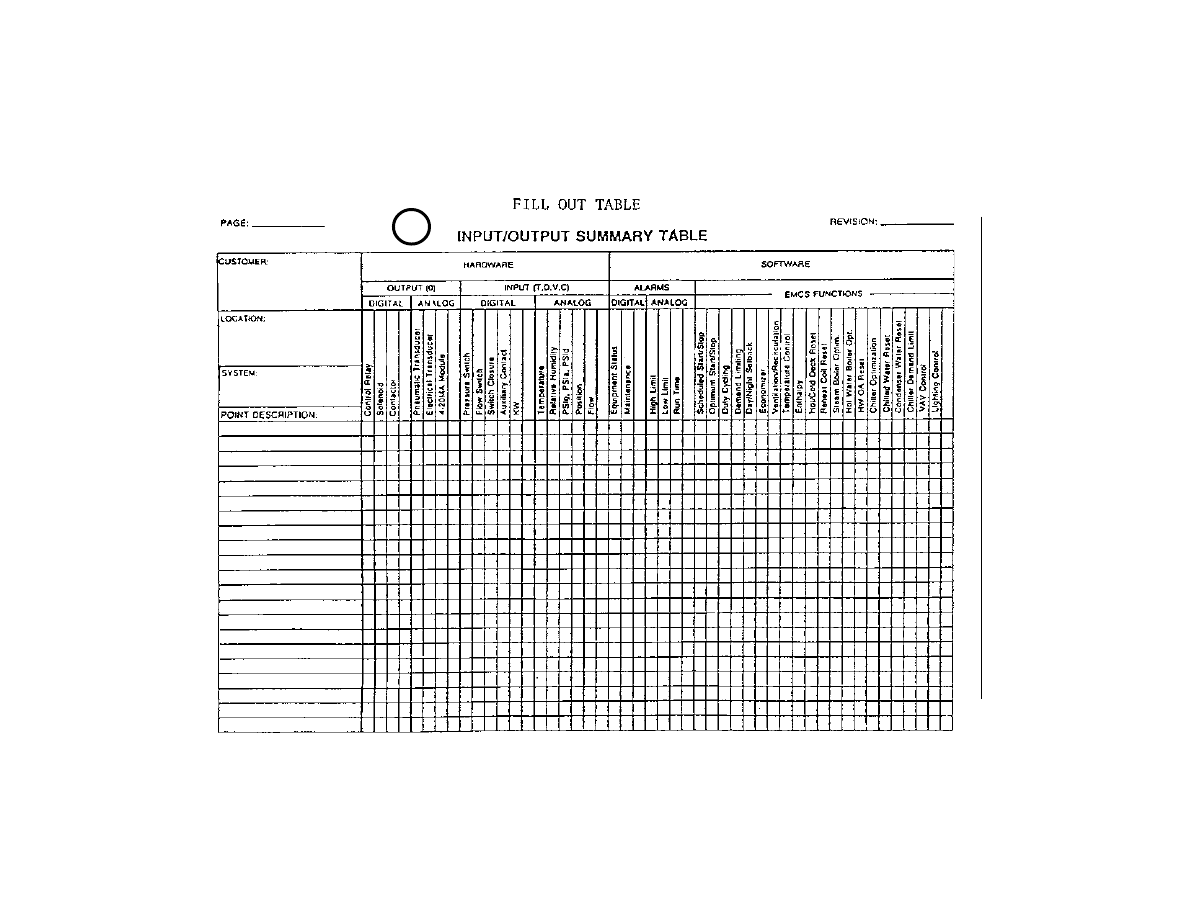
6
©2002 by The Fairmont Press
Figure F-5. Costs/Payback
Total estimated costs:
1.
Operator’s station
$_________
2.
Modem
3.
(
) DDC panels @
_________
4.
(
) feet wiring @
_________
5.
(
) air sensors @
_________
6.
(
) water sensors @
_________
7.
(
) transducers @
_________
8.
(
) contactors @
_________
9.
(
) diff. P.E. switches @
_________
10.
Drawings/engineering
_________
11.
Overhead/profit
_________
12.
Miscellaneous
_________
TOTAL COST
$_________
Total estimated savings:
Building use = 300,000 kWh/yr.
kW demand charge = $8.00 per kW
kWh energy charge $.035 per kWh
Save 15% kWh ............................................................
_________
Save 20 kW-per month ..............................................
_________
TOTAL SAVINGS ...............................
$_________
Payback = Cost
Savings
=
$
$
=
=
Years
8
7
9
©2002 by The Fairmont Press
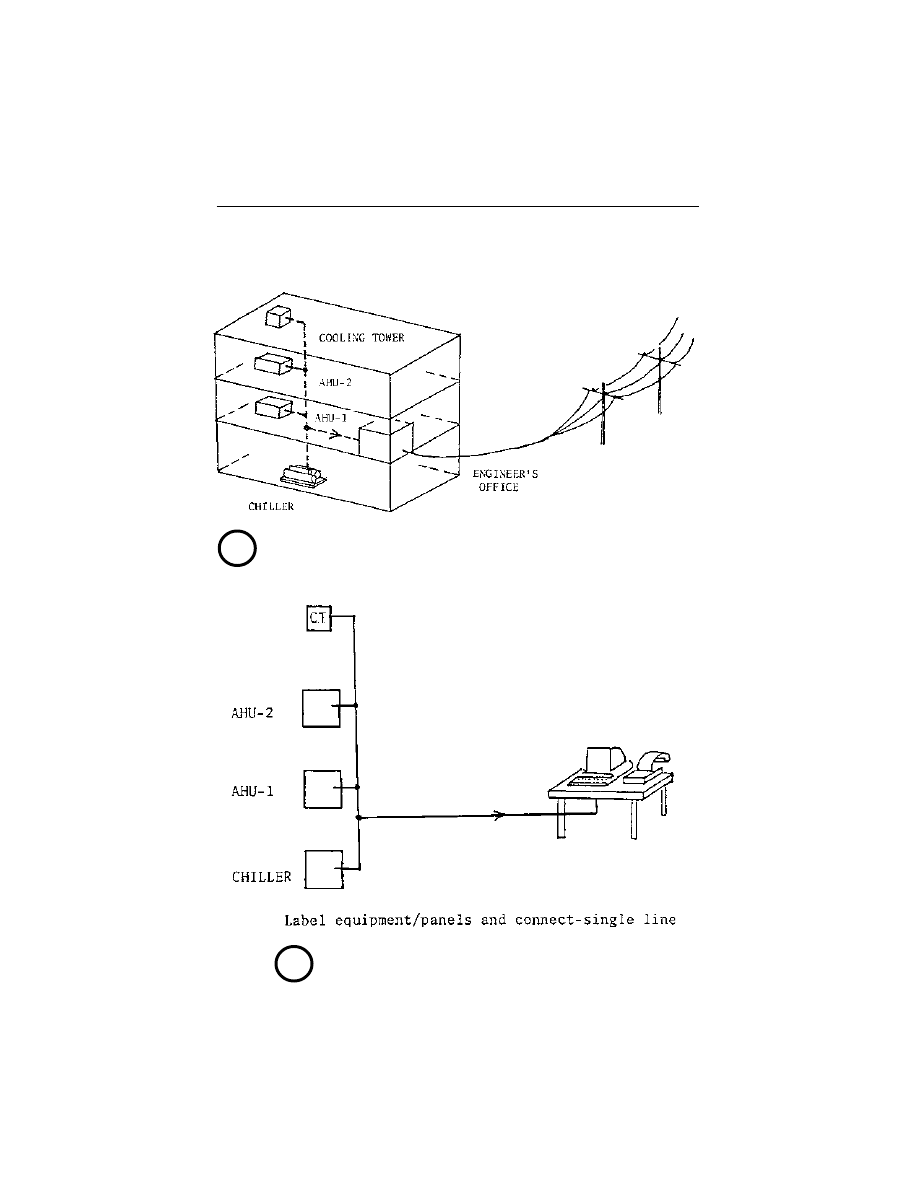
1
2
Figure F-6. Building/HVAC Equipment (Solution to
Sample EMS Solution Layout
Figure F-7. Block Diagram (Solution to
©2002 by The Fairmont Press
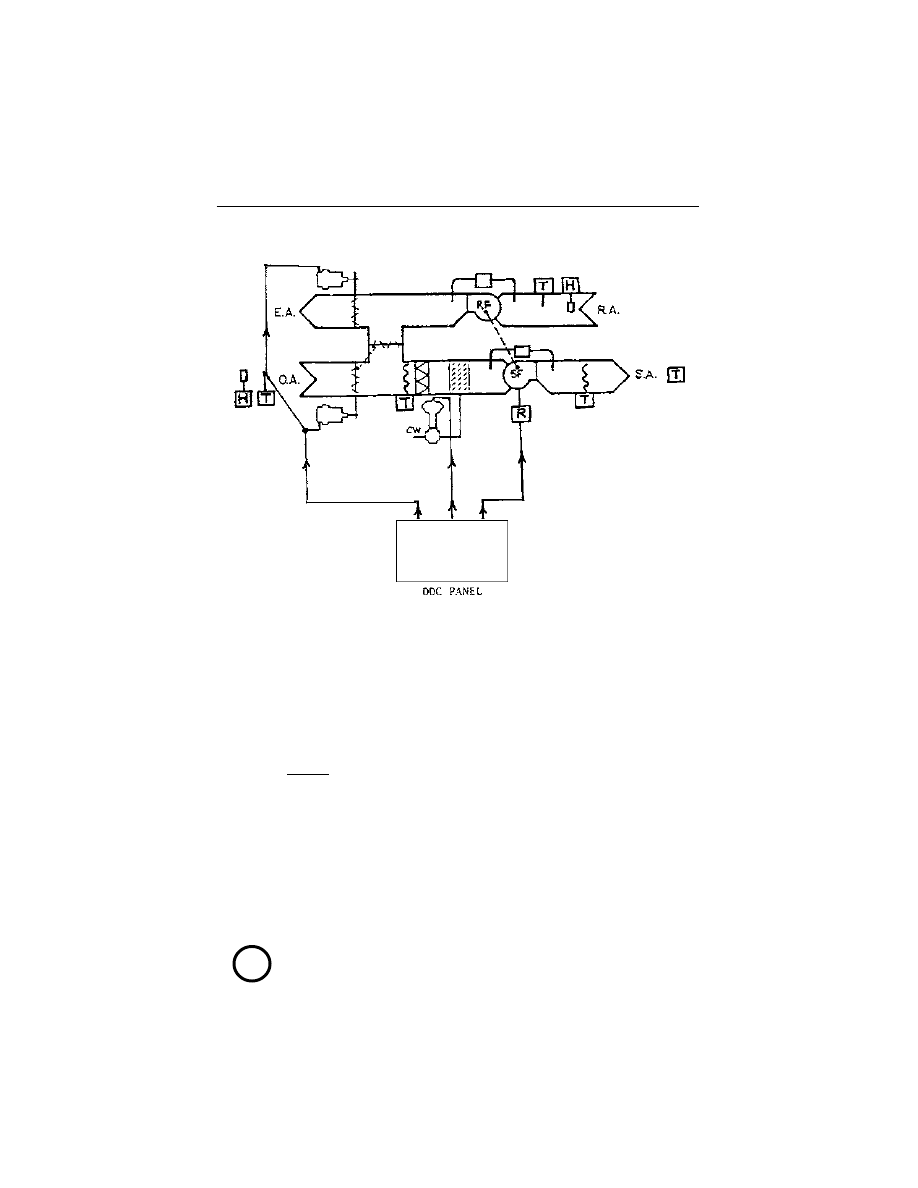
3
Figure F-8. AHU-1 and AHU-2 (Solution to
Specs
SF: scheduled start-stop, status,
run time
RF: status, run time
Mixed air: damper control, low limit, enthalpy control
Discharge air: cooling coil control, high limit
Return air: temp., humidity
Outside air: temp., humidity
Space temp.
Single line, show sensors relays, switches,
control lines, wiring.
Electronic sensors.
Pneumatic actuators.
SF/RF: electric interlock.
©2002 by The Fairmont Press
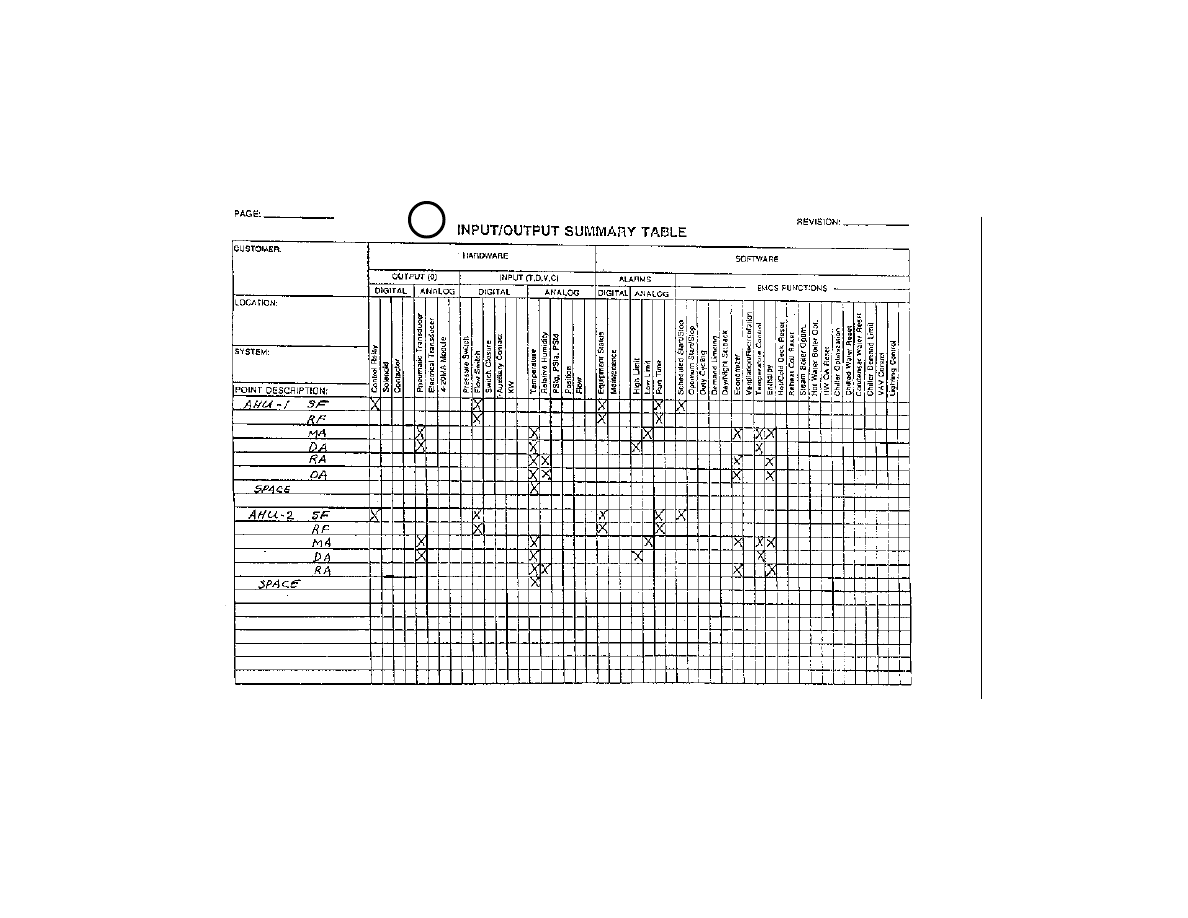
4
©2002 by The Fairmont Press
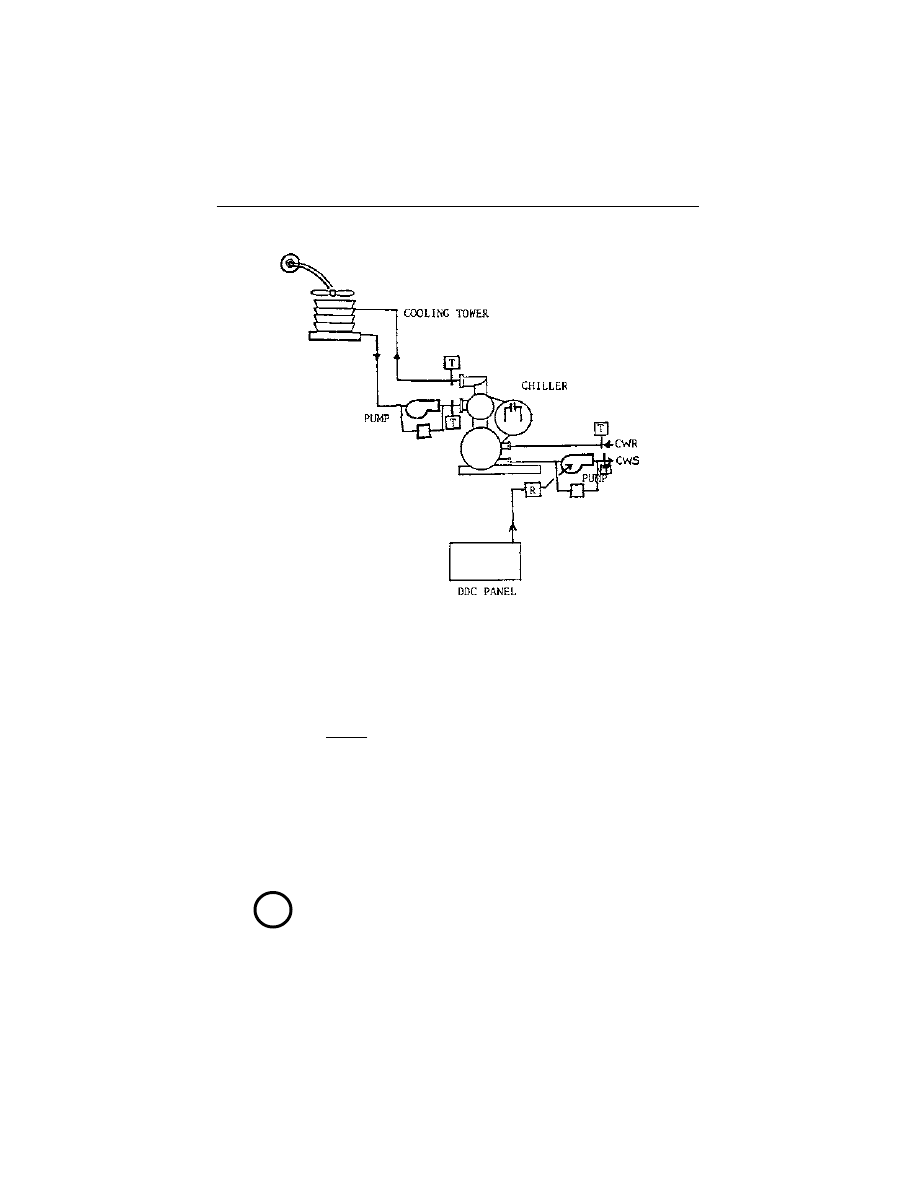
Figure F-4. Chiller System (Solution to
5
Single line, show sensors,
relays, switches, wiring.
Electronic sensors.
Pumps/chiller interlocked.
Specs
CW Pump: start-stop, status,
run time
Cond. W Pump: status, run time
Chiller: status, run time
CWS, CWR, COND WS & R: temp.
CT Fan: status, run time
©2002 by The Fairmont Press
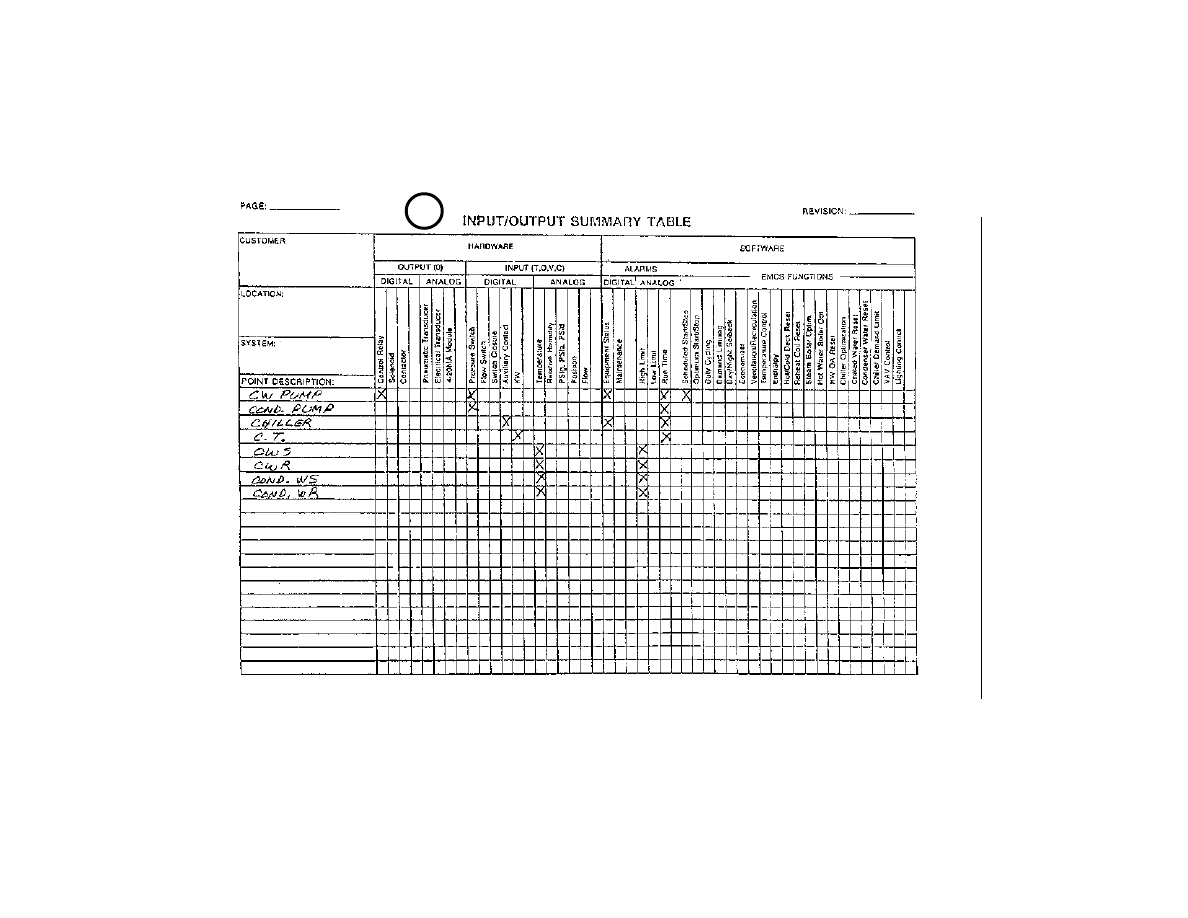
6
©2002 by The Fairmont Press
8
7
9
Figure F-10. Costs/Payback (Solution to
Total estimated costs:
1.
Operator’s station
$_________
2.
Modem
_________
3.
(
) DDC panels @
_________
4.
(
) feet wiring @
_________
5.
(
) air sensors @
_________
6.
(
) water sensors @
_________
7.
(
) transducers @
_________
8.
(
) contactors @
_________
9.
(
) diff. P.E. switches @
_________
10.
Drawings/engineering
_________
11.
Overhead/profit
_________
12.
Miscellaneous
_________
TOTAL COST
$_________
500
90
4500
300
1800
800
1000
600
1200
1400
1500
1000
14,690
2
$3500 + 1000
300
$1.00/FT
12
$150
4
$200
4
$250
3
$200
6
$200
$14,690
31 pts.
= $474/pt
Total estimated savings:
Building use = 300,000 kWh/yr.
kW demand charge = $8.00 per kW
kWh energy charge $.035 per kWh
Save 15% kWh ......................................................................
_________
Save 20 kW-per month .......................................................
_________
TOTAL SAVINGS .......................................................
$_________
20 kW
×
12 mo
×
$8/kW = $1920
300,000 kWh
×
.15
×
$.035/kWh = $1575
$1,575
$1,920
3,495
Payback =
Cost
Savings
=
$
14,690
$
3,495
=
4.2
Years
©2002 by The Fairmont Press

Remember!
EMS/DDC MILESTONES
•
ORIGINAL IDEA/INITIAL CONCEPT
•
SURVEY BUILDINGS AND SYSTEMS/RETRIEVE INFORMA-
TION
•
IMPLEMENT PROJECT/DESIGN SYSTEM
•
PREPARE PLANS/SPECIFICATIONS
•
BID/CONTRACT
•
SHOP DRAWINGS/INSTALLATION
•
COMMISSIONING/TRAINING
•
ACCEPTANCE/GUARANTEE
•
OPERATION/MAINTENANCE/SERVICE
DDC/EMS IMPORTANT POINTS
•
DDC/EMS will not solve existing mechanical problems.
(leaky dampers, sticky valves, dirty coils)
•
Purchase what you need, not what is available.
($50 time clock/$5,000 microprocessor?)
•
What are the qualifications of your own staff?
•
Understand how your building functions and consumes energy.
(Access to monthly utility bills)
©2002 by The Fairmont Press

•
Be certain the manufacturer has strong local support and service.
(The best product might not perform)
•
Perform a complete field survey
(Locate all equipment, measure all capacities)
•
Design engineer should remain with project through final commis-
sioning
(Installer may not understand design concept)
•
A good project manager can assure a good installation.
(Continual on-site supervision)
•
Develop a specification that will provide the results you expect.
•
DDC/EMS should be operated by simple English language.
(User friendly)
•
Do not purchase a system with a central mini-computer.
(Old technology)
•
Provide your staff with the understanding (advance literature and
involvement) and adequate training (off-site and on-site) to oper-
ate and maintain the DDC/EMS.
AVOID EMS PITFALLS
•
Imprecise EMS specifications.
•
Improper maintenance—EMS cannot be ignored.
•
Incompetent vendors of EMS—”here today/gone tomorrow.”
•
Flawed estimates of savings.
•
Excluding operating staff from decision-making; they must under-
stand why and how since they will be responsible for operation
and maintenance.
©2002 by The Fairmont Press

•
Not anticipating a debugging period—6 months to 1 year can be
expected.
•
Improper load control—so that chillers and some air handling
units can’t be cycled on/off.
•
Software hazards—have system on backup disk.
•
Exclusion of monitoring capability.
•
Exclusion of manual override in control of equipment or building
areas.
•
No energy record-keeping for before and after comparison.
•
Lack of incentives to maintain the program.
EMS—INTELLIGENT QUESTIONS THAT REQUIRE AN ANSWER
1. How long has the manufacturer been in business manufacturing
EMS (or DDC) systems?
2. How long has the installer been in business installing EMS sys-
tems?
3. How many systems has the manufacturer installed;
That are comparable to your proposed system?
That are working?
To the satisfaction of the owner?
4. How much control over the system software does the manufac-
turer have? Do you have?
Knowledgeable computer people are not “a dime a dozen,” but
there are, and will be many computer engineers and technicians
available in the near future.
©2002 by The Fairmont Press

5. Must you contact the manufacturer every time you want to con-
sider an update program or when you want to create a new ap-
plication program?
6. What are the costs for the various features, changes, source codes,
updates?
7. What are the maintenance costs for 1 year? For 5 years?
8. What are the prices for system components? What are the labor
rates?
9. What are the qualifications of your own staff?
10. How thoroughly will the system be checked out after installation
(prior to the start of the normal 1-year guarantee period)?
Before committing money to an EMS installation find out the an-
swers to these questions:
1.
What do you need—not what is available.
2.
What are your people capable of doing—not what you would like
your people to be capable of doing.
3.
What will your costs and savings ultimately be—not what some
salesman has projected or promised.
©2002 by The Fairmont Press
Document Outline
- dke178_fm.pdf
- DKE178_CH01.pdf
- DKE178_CH02.pdf
- DKE178_CH03.pdf
- DKE178_CH04.pdf
- DKE178_CH05.pdf
- DKE178_CH06.pdf
- DKE178_CH07.pdf
- Energy Management Systems And Direct Digital Control
- Contents
- Chapter 7: Software/application Programs
- Introduction
- Programs
- Scheduled Start/stop
- Optimum Start/stop
- Duty Cycling
- Demand Limiting
- Day/night Setback
- Economizer
- Enthalpy
- Ventilation And Recirculation
- Hot Deck/cold Deck Temperature Reset
- Reheat Coil Reset
- Steam Boiler Optimization
- Hot Water Boiler Optimization
- Hot Water Oa Reset
- Chiller Optimization
- Chiller Water Temperature Reset
- Condenser Water Temperature Reset
- Chiller Demand Limit
- Lighting Control
- Special Applications
- Energy Management Systems And Direct Digital Control
- DKE178_CH08.pdf
- DKE178_CH09.pdf
- DKE178_CH10.pdf
- DKE178_CH11.pdf
- DKE178_CH12.pdf
- DKE178_CH13.pdf
- DKE178_CH14.pdf
- DKE178_CH15.pdf
- DKE178_CH16.pdf
- DKE178_CH17.pdf
- DKE178_APP.pdf
Wyszukiwarka
Podobne podstrony:
plik (71) ppt
plik (80) ppt
plik (86) ppt
plik (22) ppt
Dźwięk cyfrowy plik cyfrowy
plik (26) ppt
plik (48) ppt
plik (29) ppt
plik (129)
plik (20)
plik (124)
plik (61)
plik (315)
plik (45)
więcej podobnych podstron