PODSTAWY ROBOTYKI I
MECHANIZACJI
PROJEKT
Urządzenie do łączenia elementów : rdzenia w kształcie
walca i osłony
Wykonali : Łukasz Kraska
Młodawski Marcin
Grupa: 3ED12
Kierunek : Elektrotechnika
Specjalność: Automatyka

Spis treści:
1. Opis działania zaprojektowanego urządzenia.
2. Wygląd urządzenia.
3. Zasada działania urządzenia.
4. Schemat działania układu przedstawiony metodą grafów i
cyklogramu
5. Realizacja działania urządzenia na układzie pneumatycznym
6. Realizacja działania urządzenia na układzie pneumo-
elektrycznym.
7. Program do sterownika PLC realizujący działanie układu.
8. Posumowanie projektu.
1. Opis urządzenia i sposób jego działania.
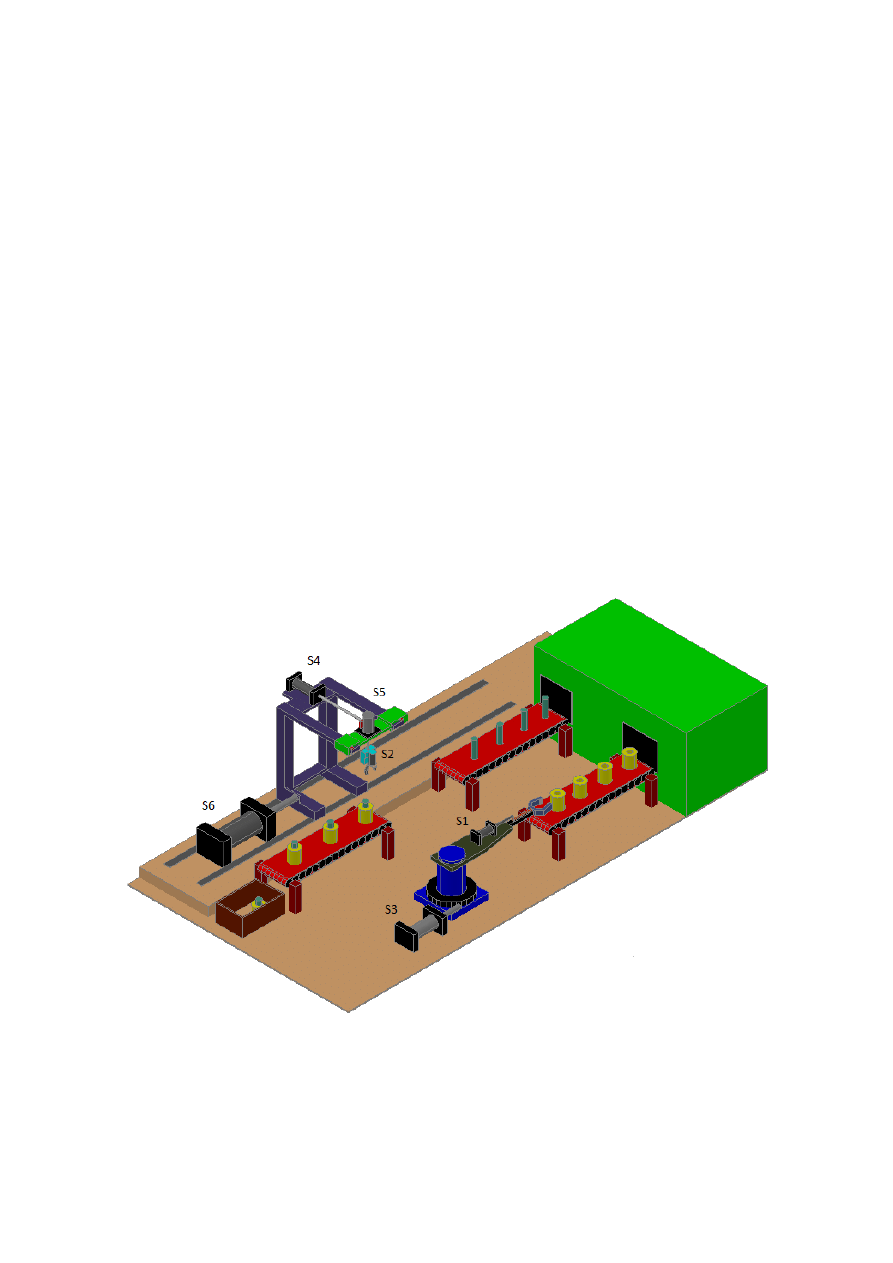
Zaprojektowane urządzenie stanowi stację do łączenia elementów , które dostarczane
są za pomocą dwóch osobnych taśmociągów . Pierwszym taśmociągiem podążają
elementy które posiadają wydrążony w procesie technologicznym otwór do którego
mają być montowane elementy w kształcie walca podążające na drugim taśmociągu.
Elementy z pierwszego taśmociągu są odbierane przez ramię które obraca się z
elementem do punktu w którym ma nastąpić połączenie elementów ze sobą . Obrót
ramienia odbywa się poprzez zamianę ruchu liniowego na ruch obrotowy. Elementy
w kształcie walca z drugiego taśmociągu odbierane są przez manipulator, który może
poruszać się w trzech osiach x,y,z. Robot po odebraniu elementu z taśmociągu
transportuje go do punktu w którym ma nastąpić połączenie z elementem trzymanym
przez ramię . Po osiągnięciu przez robota pozycji do łączenia elementów następuje
wysunięcie siłownika co powoduje wsunięcie elementu w kształcie walca do
drugiego elementu . Po wykonaniu tej czynności robot opuszcza element , który jest
następnie transportowany trzecim taśmociągiem do pojemnika a później do
magazynu.
2. Wygląd zewnętrzny urządzenia.
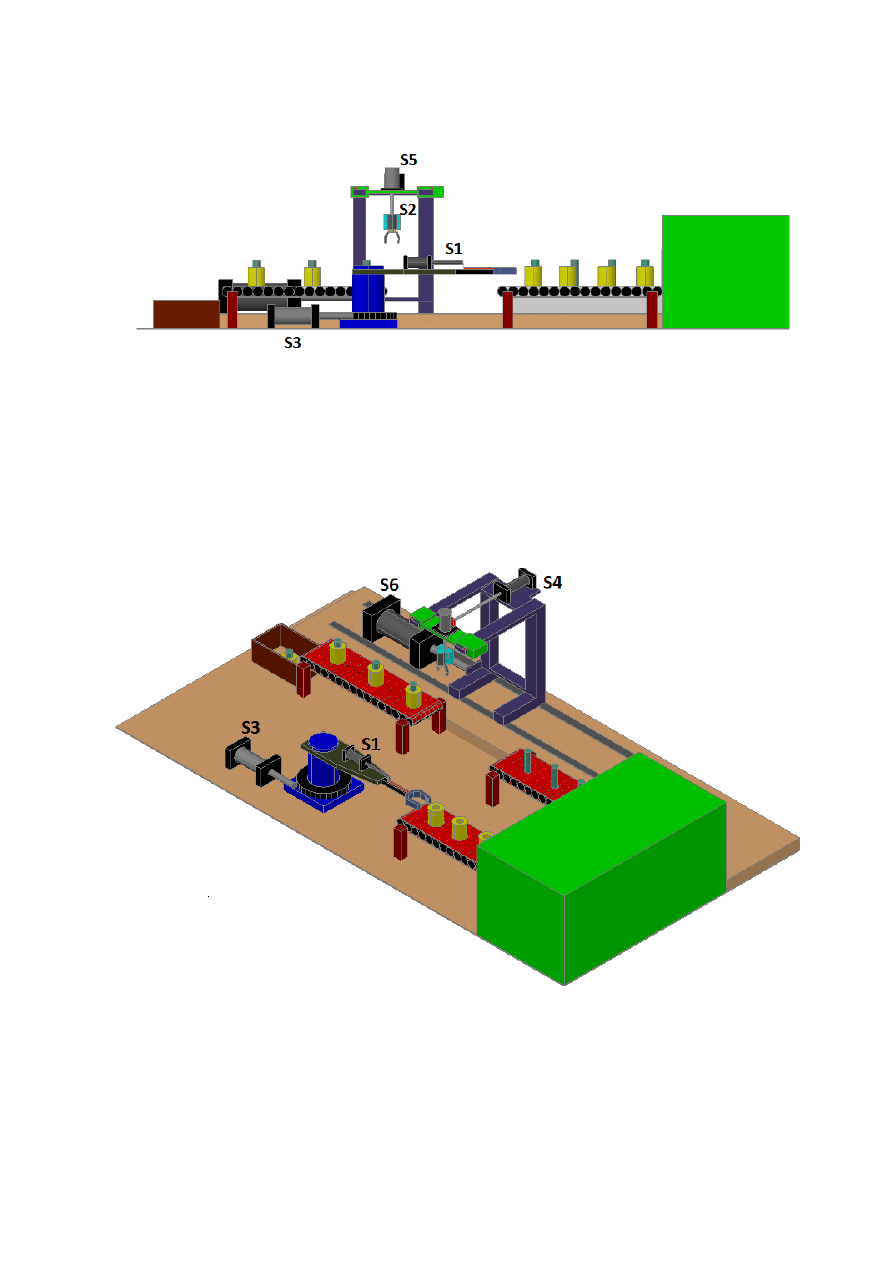
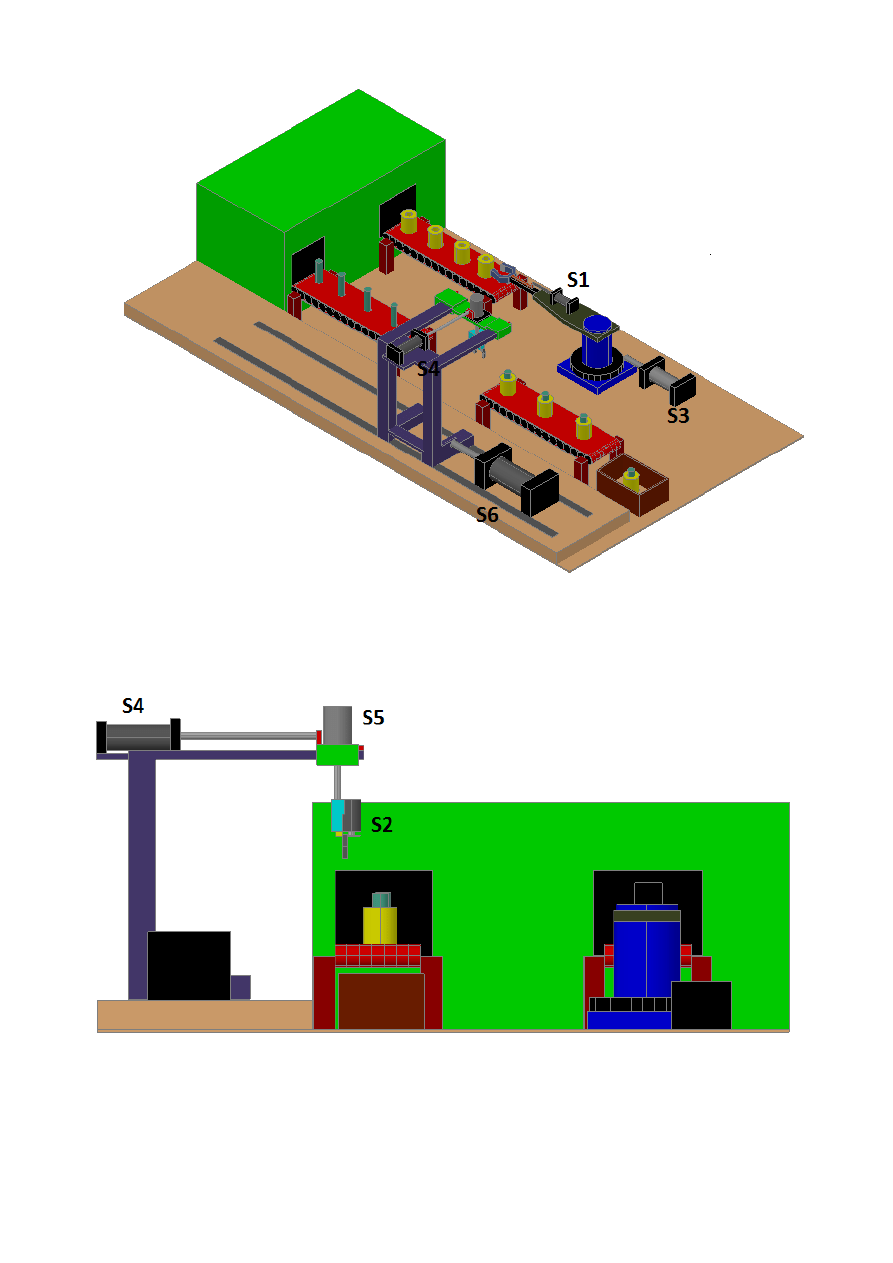
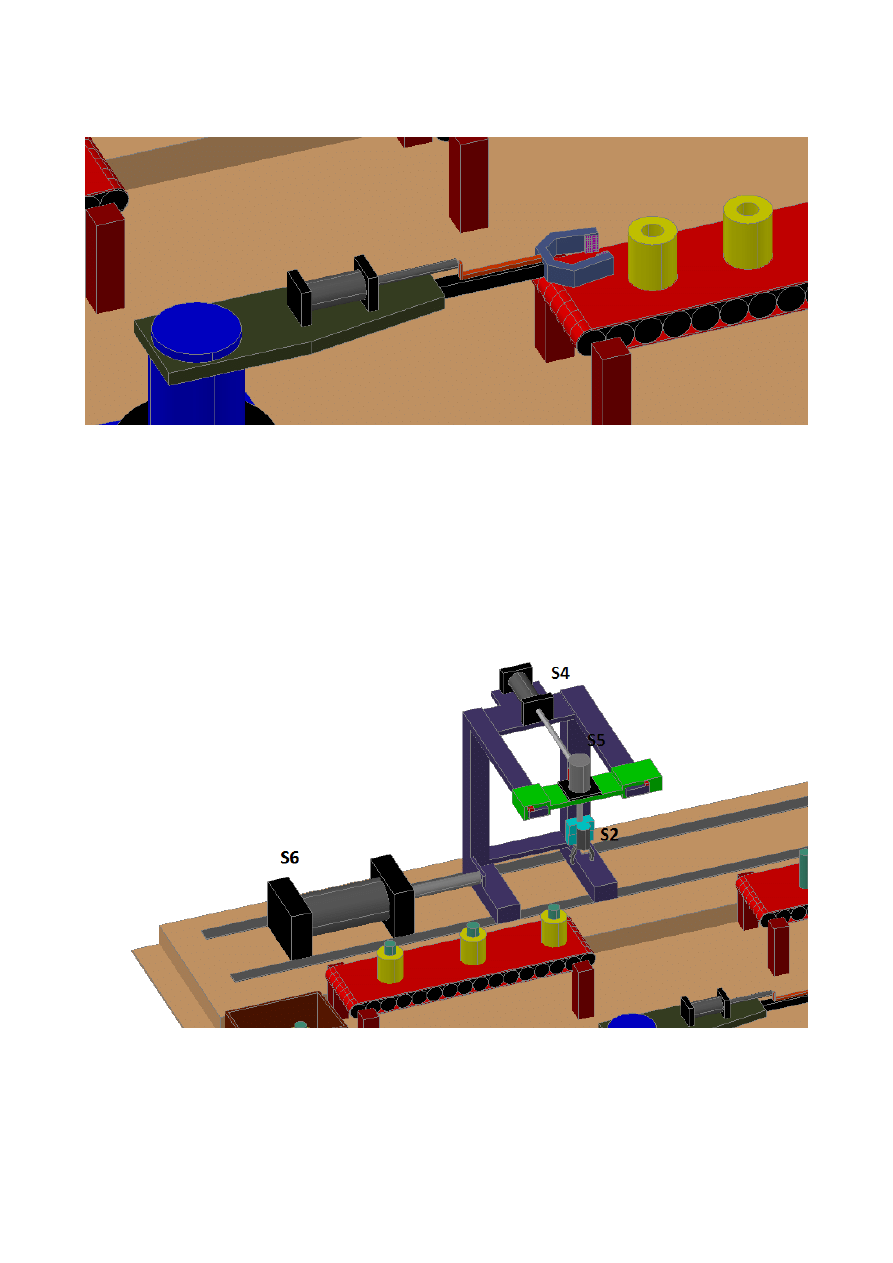
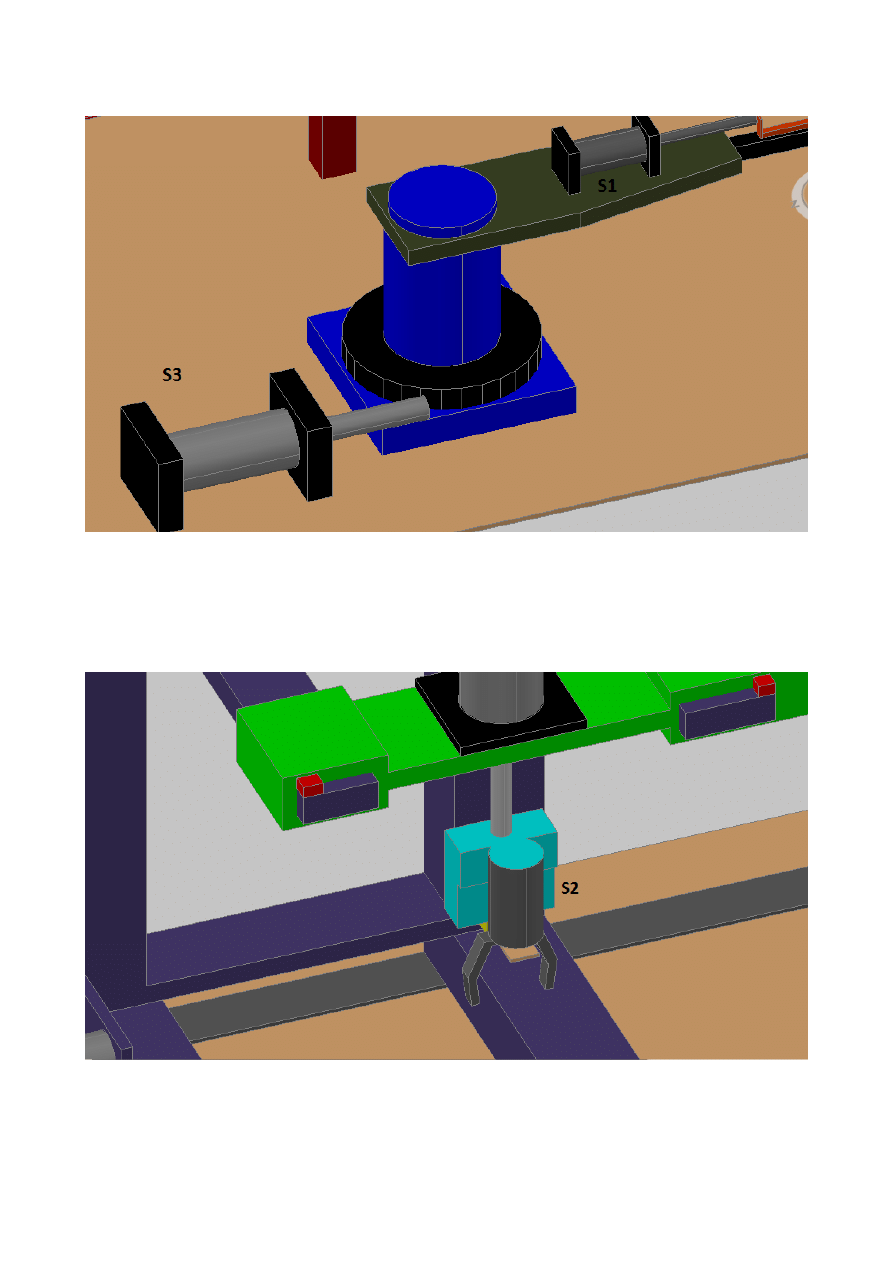

3. Szczegółowy opis działania urządzenia.
Urządzenie uruchamiane jest w pracę sekwencyjną przez przycisk bistabilny ''S''.
następnie wysuwany jest siłownik S6(F) , który powoduje że manipulator przesuwa
się na miejsce odbioru elementów w kształcie walca z drugiego taśmociągu . Gdy to
nastąpi ruszają(wysuwają się) jednocześnie siłowniki S1(A) i S5(E), siłownik S1
powoduje uchwycenie osłony z taśmociągu pierwszego a siłownik S5 powoduje że
chwytak manipulatora nie przewróci elementów jadących po taśmociągu drugim. Po
tym cyklu następuje wysunięcie siłowników S2(B) i S3(C) . Zadziałanie siłownika S2
powoduje że chwytak manipulatora zostaje przesunięty bezpośrednio nad element na
taśmociągu i oczekuje na właściwy dla niego sygnał , siłownik S3 obraca ramię
(dzięki kołu zębatemu zamieniany jest ruch prostoliniowy na ruch wahadłowy) o 90
stopni które trzyma swoim chwytakiem element i po wykonaniu obrotu znajduje się
nad trzecim taśmociągiem oczekując na nadejście manipulatora z elementem. W
kolejnym kroku następuje wsunięcie siłownika S5(E) , który razem z chwytakiem
unoszą element z taśmociągu drugiego. Po wykonaniu czynności następuje wsunięcie
siłownika S6(F) czyli powrót manipulatora z elementem do taśmociągu trzeciego
gdzie ma się odbywać połączenie . Po dojechaniu manipulatora na miejsce następuje
wysunięcie chwytaka manipulatora z elementem do przodu nad taśmociąg trzeci
S4(D). Po skończeniu poprzedniego kroku następuje łączenie rdzenia w kształcie
walca z osłoną , następuje to gdy wysunięty zostaje siłownik S5(E) . Po wsunięciu
rdzenia do osłony następuje powrót siłownika S2(B) co skutkuje rozwarciem szczęk
manipulatora i puszczeniem rdzenia . W kolejnym kroku następuje równoczesny
powrót siłowników S1(A) i S5(E) co powoduje uniesienie się chwytaka manipulatora
i puszczenie złączonych elementów przez chwytak ramienia , element następnie jest
transportowany taśmociągiem trzecim do pakowania . Na zakończenie następuje
powrót siłowników do stanu początkowego , i rozpoczęcie od nowa procesu i tak
cyklicznie wiele razy.
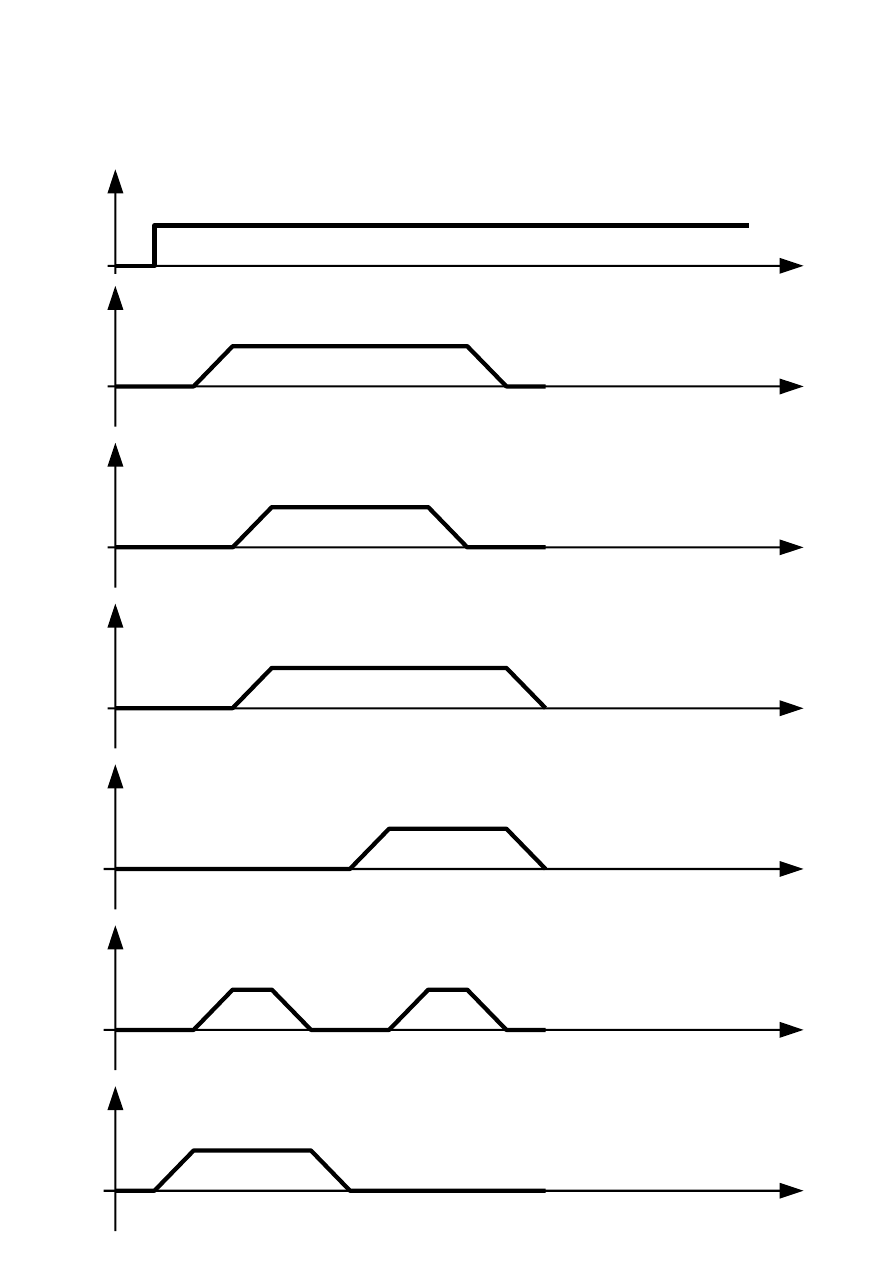
4. Metoda grafowa i cyklogram.
Cyklogram działania urządzenia.
0
1
1
0
1
0
1
0
1
0
S1
S2
S3
S4
S5
S6
Z
t
t
t
t
t
t
t
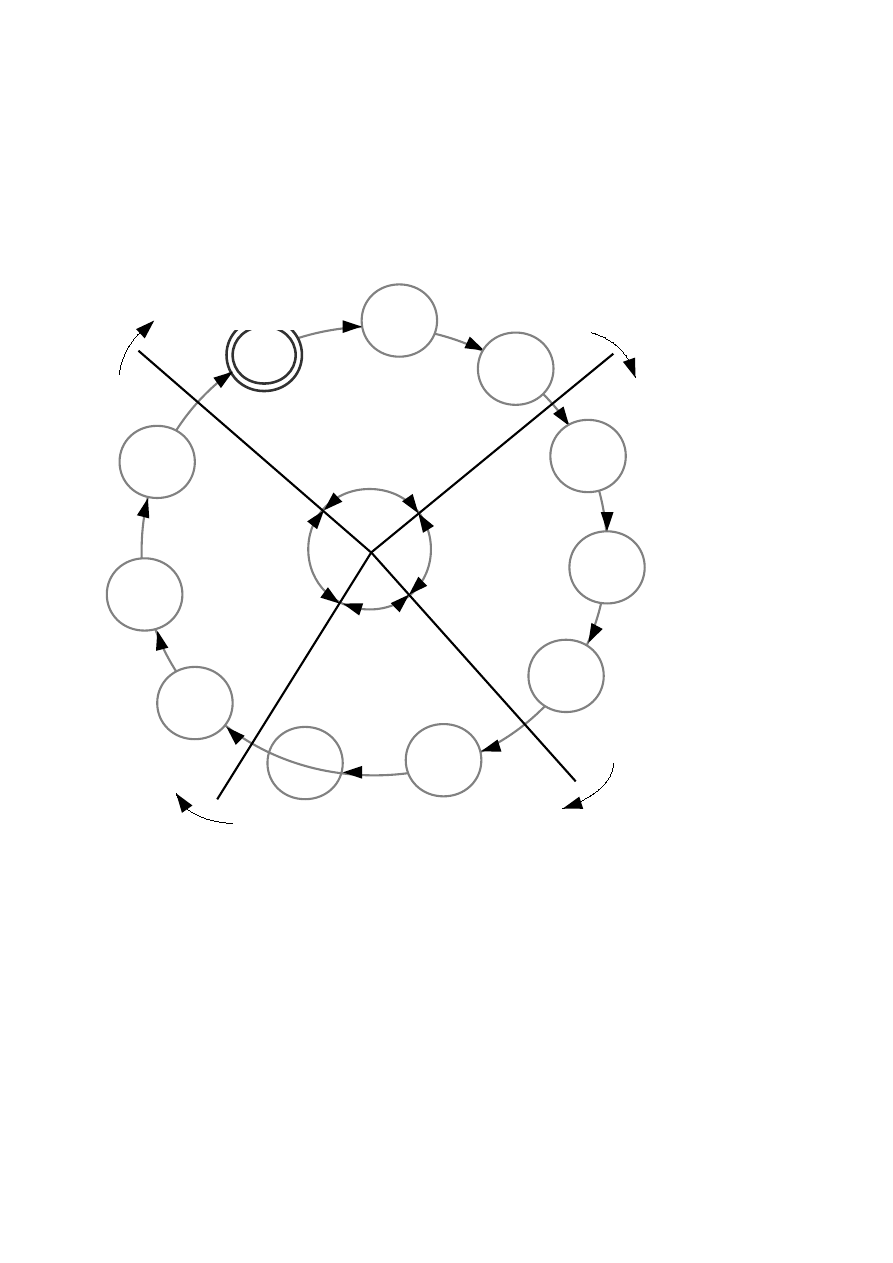
Metoda grafowa :
Dzięki rozrysowaniu działania układu sekwencyjnego za pomocą grafów dobrze
widoczne są zależności pomiędzy działaniem siłowników w poszczególnych i
następnych stanach . Poszczególne stany siłowników są pogrupowane ale w ten
sposób aby nie powtarzały się w jednej grupie te same stany bo mogłoby dojść do
złego działania układu.
Funkcje opisujące prace siłowników oraz funkcje działania pamięci:
A+ = f
1
k
1
x
1
=c
o
d
o
k
4
A- = b
o
k
4
x
2
=Π(e
1
a
1
k
1
)
B+C+ = k
2
x
3
=f
0
k
2
B- =k
4
x
4
=Π(k
3
e
1
)
C-D- =Π(a
0
e
0
k
4
)
D+ =k
3
E+ =Σ(f
1
k
1
+d
1
k
3
)
E- = Σ(b
o
k
4
+b
1
c
1
k
2
)
F+ =sk
1
F- =Π(e
0
k
2
)
F+
A-
E-
START
E-
B+
C+
A+
E+
E
+
D+
F-
C-
D-
K1
K2
K3
K4
S
f1
a1 e1
b1 c1
c0
f0
d1
e1
b0
ao e0
c0 d0
x1
x2
x3
x4
B-
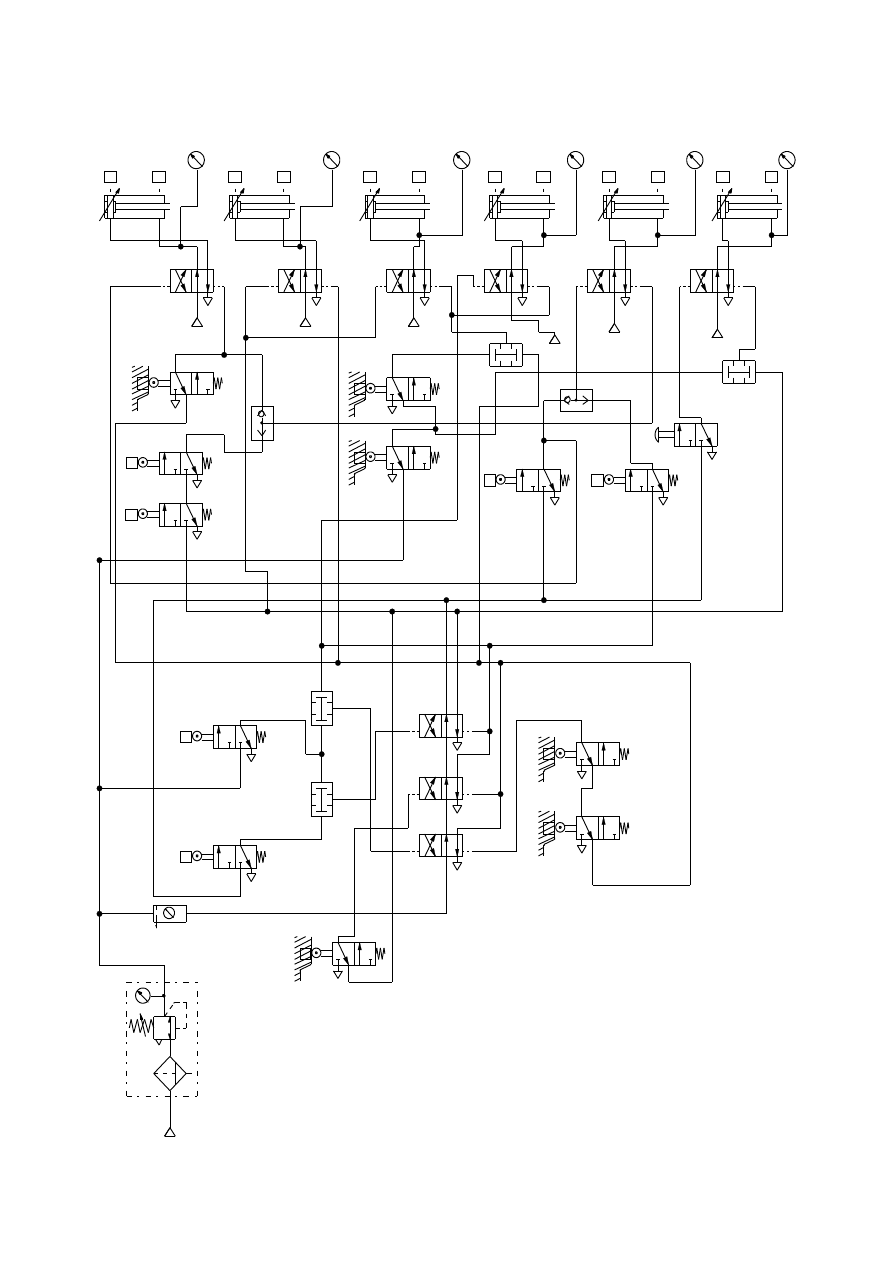
5. Schemat pneumatyczny
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
4
2
1
3
2
1
3
B0
2
1
3
E1
2
1
3
F1
2
1
3
D1
2
1
3
2
1
3
A1
1
1
2
1
1
2
1
1
2
1
1
2
2
1
3
E0
2
1
3
A0
2
1
3
F0
2
1
3
C1
2
1
3
C0
2
1
3
D0
A0
A1
B0
B1
C0
C1
D0
D1
E0
E1
F0
F1
1
1
2
1
1
2
2
1
3
B1
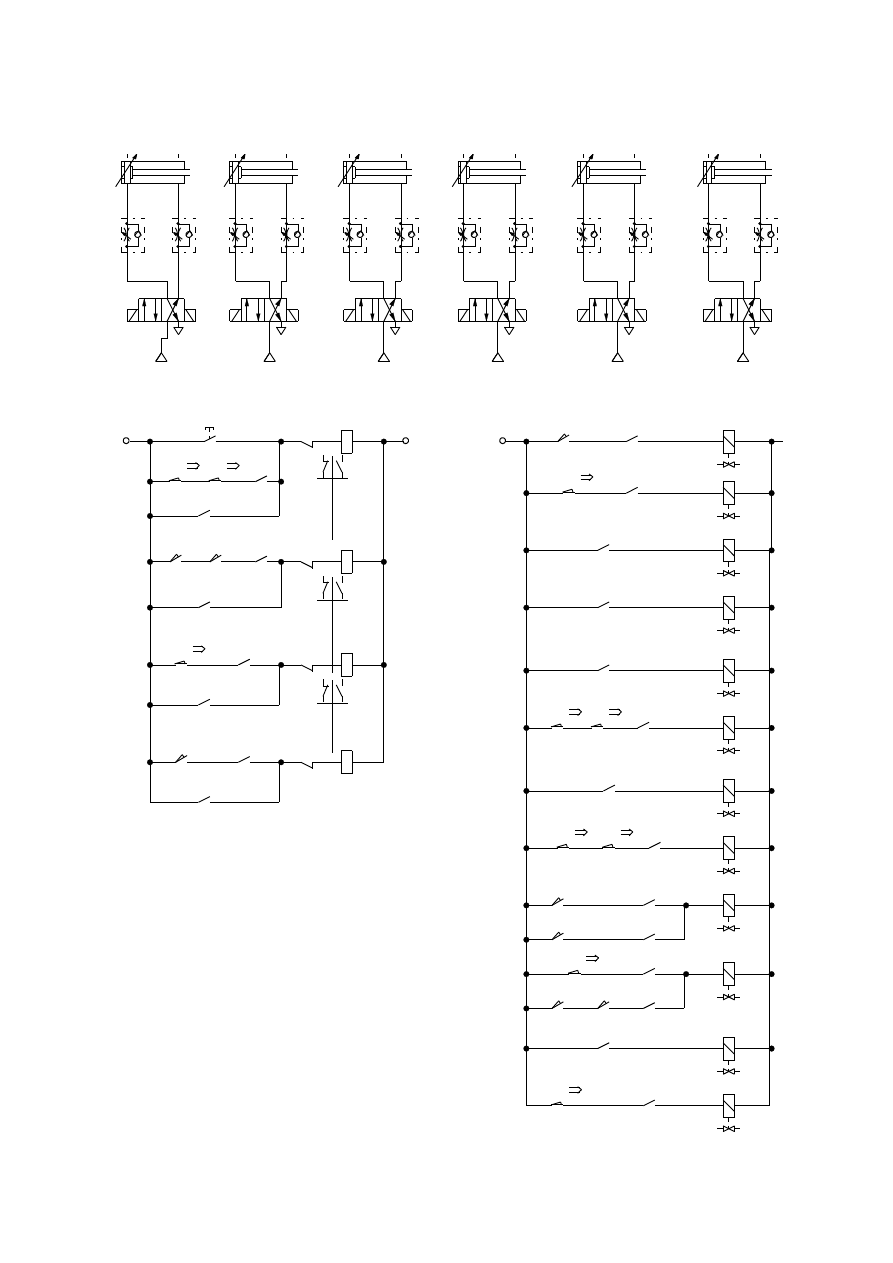
6. Schemat pneumo-elektryczny.
4
2
1
3
A+
A-
4
2
1
3
B+
B-
4
2
1
3
C+
C-
4
2
1
3
D+
D-
4
2
1
3
E+
E-
4
2
1
3
F+
F-
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
5
0
%
A0
A1
B0
B1
C0
C1
D0
D1
E0
E1
F0
F1
+24V
0V
+24V
K
1
K
3
K
2
K
4
K
2
K
1
A
1
K
2
K
3
E
1
F
1
E
1
K
1
K
1
K
4
K
4
K
3
K
1
A
+
A
-
B
+
B
-
D
-
E
+
E
-
F
+
C
-
D
+
F
-
C
+
K
4
K
2
K
4
K
4
K
1
K
3
F
1
K
2
K
3
B
1
D
1
K
4
C
1
K
2
K
1
K
2
K
4
K
2
K
3
K
4
C
0
D
0
F
0
B
0
A
0
E
0
A
0
E
0
E
0
B
0
1
2
3
4
5 6
7 8
9 10
11
12
13
14
16
19
20
21
3
6
15
16
16
8
3
5
15
15
16
16
8
3
5
15
16
8
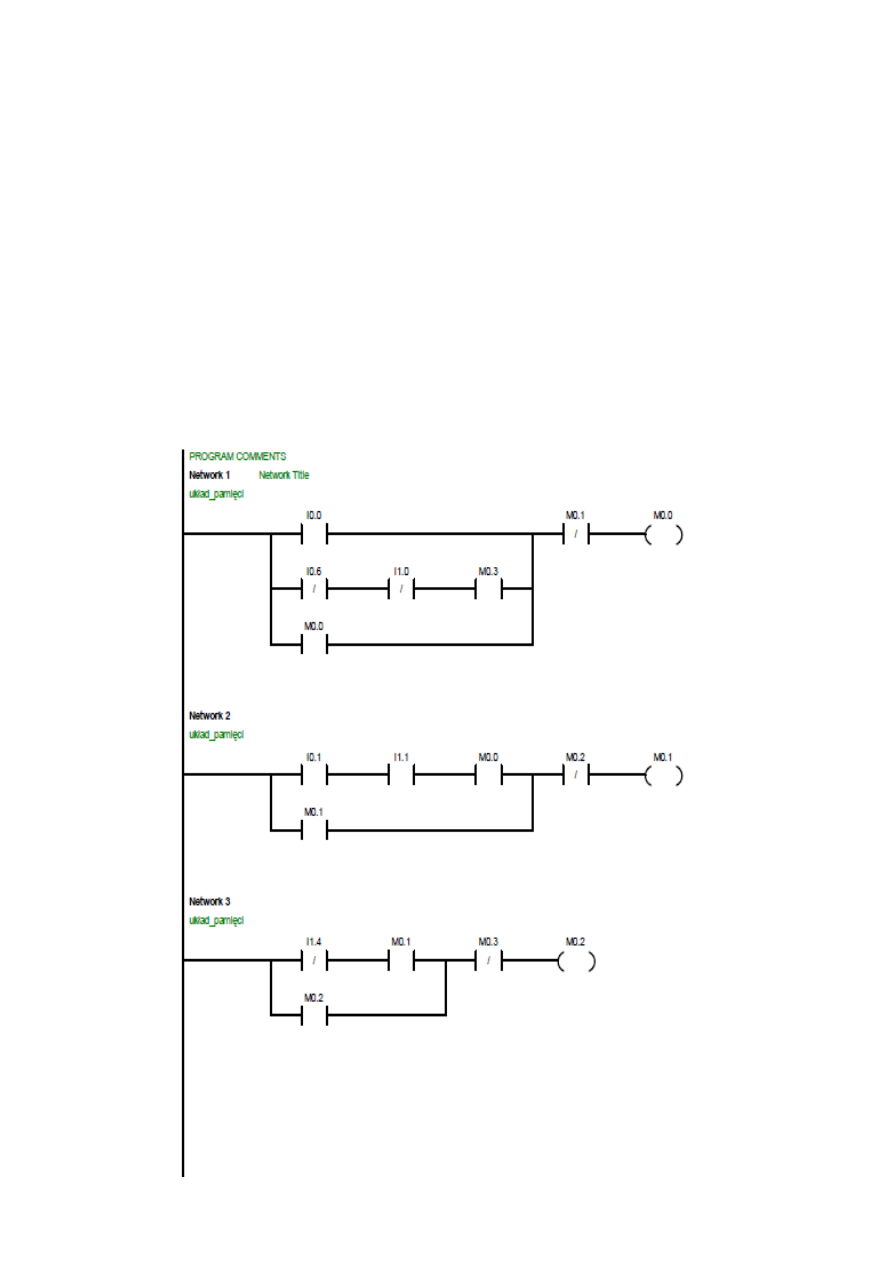
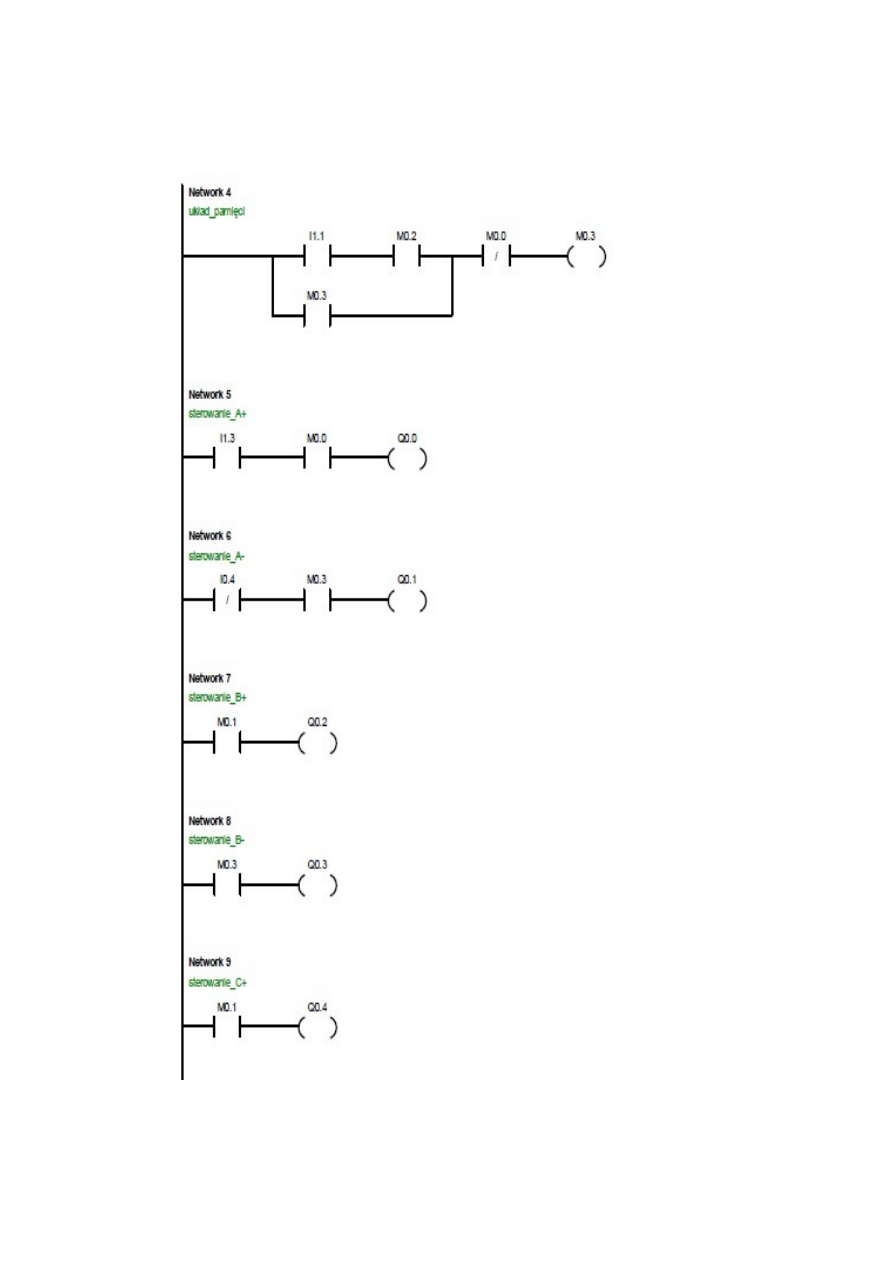
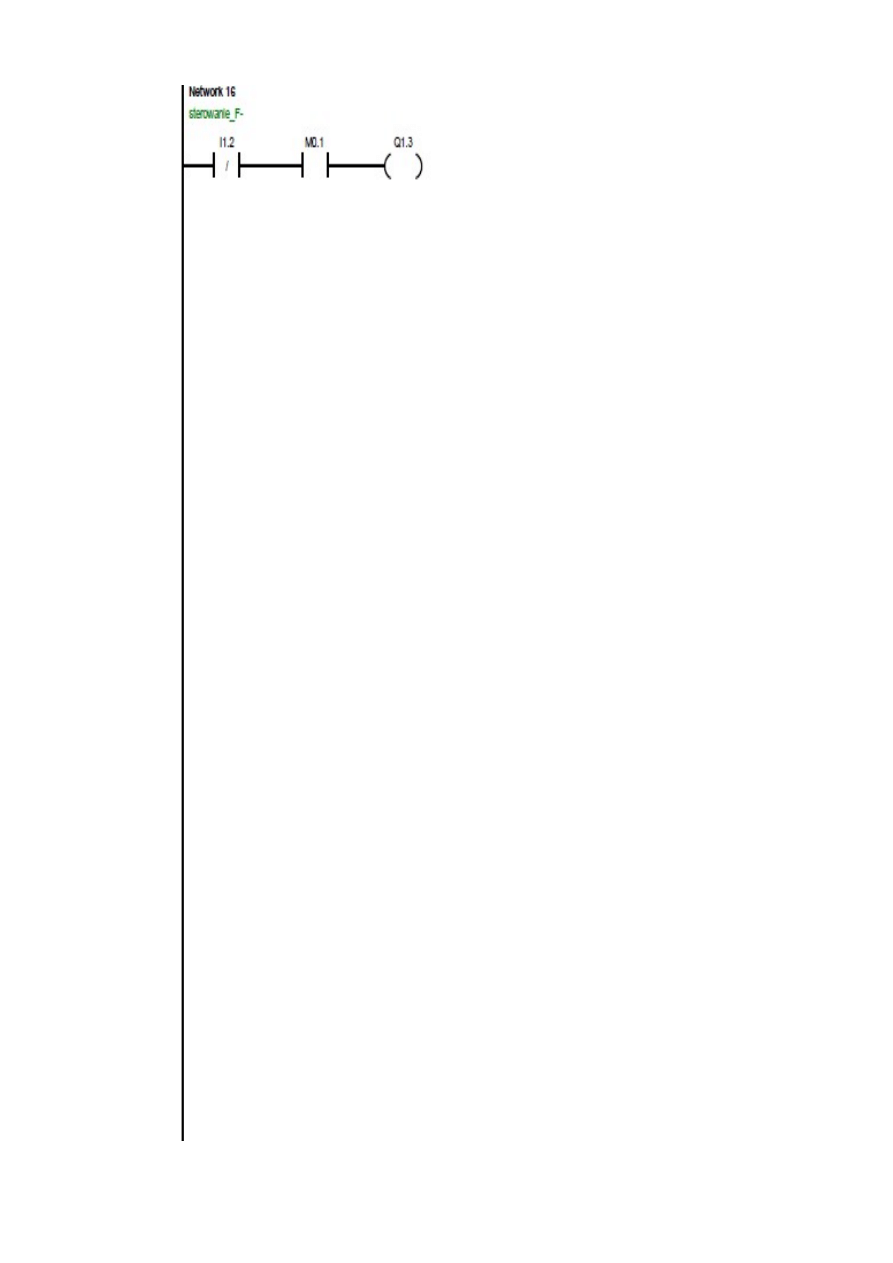
7. Realizacja na sterowniku S7-1200.
Kraska Młodawski / MAIN (OB1)
Block: MAIN
Author: Kraska/Młodawski
Created: 06/25/2012 16:49:43 am
Last Modified: 06/25/2012 22:30:18 am
Symbol
Var Type Data Type Comment
TEMP
TEMP
TEMP
TEMP
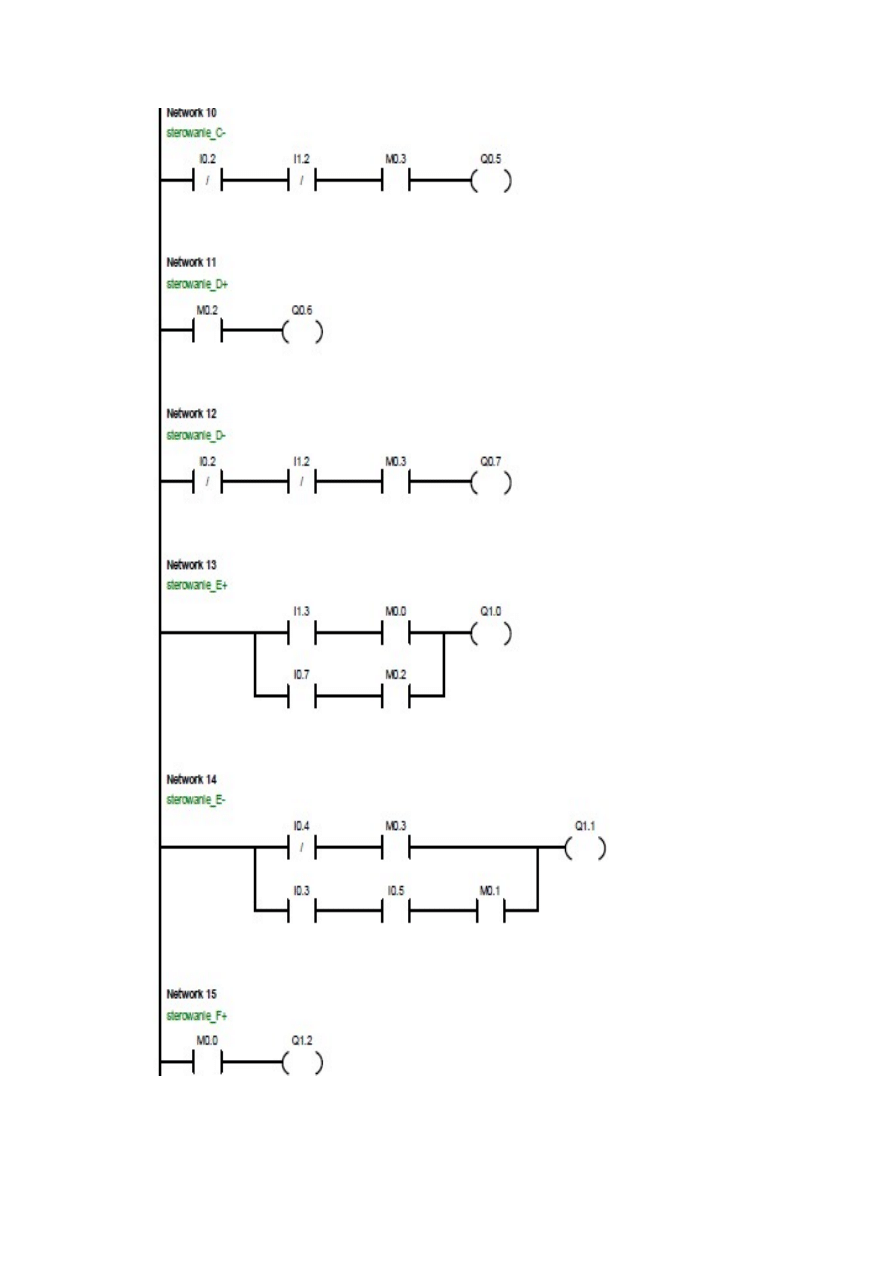

Oznaczenia styków
I0.0-start Q0.0- A+
I0.1- a
1
Q0.1- A-
I0.2- a
0
Q0.2- B+
I0.3- b
1
Q0.3- B-
I0.4- b
0
Q0.4- C+
I0.5- c
1
Q0.5- C-
I0.6- c
0
Q0.6- D+
I0.7- d
1
Q0.7- D-
I1.0- d
0
Q1.0- E+
I1.1- e
1
Q1.1- E-
I1.2- e
0
Q1.2- F+
I1.3- f
1
Q1.3- F-
I1.4- f
0
M0.0- k
1
M0.1- k
2
M0.2- k
3
M0.3- k
4

8. Podsumowanie projektu.
Projekt który przedstawiliśmy powyżej przedstawia fragment linii produkcyjnej ,
rdzenia z osłoną . Głównymi maszynami linii jest manipulator oraz ramie obrotowe.
Linie tą można z łatwością przerabiać w zależności od zapotrzebowania na inne
produkty o innych kształtach i gabarytach. Podany fragment linii posiada jako
elementy sterujące siłowniki dwustronnego działania o różnych gabarytach w
zależności od zapotrzebowania na moc . Układ sterowania został wykonany przez nas
na elementach pneumatycznych , oraz wykonaliśmy wersje sterowania elektro-
pneumatyczną oraz przy wykorzystaniu sterownika S7-1200. Układ pneumatyczny i
elektro-pneumatyczny zostały wykonane i zasymulowane w programie FluidSim .
Rysunki 3D zostały wykonane w programie AutoCAD firmy Autodesk , natomiast
szkice 2D w programie DrawOffice firmy Microsoft.
Wyszukiwarka
Podobne podstrony:
Projekt Kraska Mlodawski (2)
Projekt Kraska Mlodawski
Projekt Kraska Mlodawski
Projekt Kraska Młodawski
Projekt Kraska Mlodawski
Kraska Mlodawski
projekt o narkomanii(1)
!!! ETAPY CYKLU PROJEKTU !!!id 455 ppt
Wykład 3 Dokumentacja projektowa i STWiOR
Projekt nr 1piątek
Projet metoda projektu
34 Zasady projektowania strefy wjazdowej do wsi
PROJEKTOWANIE ERGONOMICZNE
więcej podobnych podstron