Bartosz Góra, Kamil Jakubczak
Projekt cz. 2 - metoda Sztywnych Elementów Skoñczonych SES
Dane liczbowe
In[1]:=
dane
=
9
a
®
1.1, b
®
1.4, F
®
40 000, q
®
2000, EE
®
2.1
*
10 ^ 11, ro
®
7850,
Jz
®
bp
*
hp
3
12
, bp
®
0.047, hp
®
3
2
bp, Ap
®
bp
*
hp, kt
®
1.2, GG
®
0.8
*
10 ^ 11
=
;
Podzia³ ramy na elementy
In[2]:=
N1
=
15;
N2
=
21;
N3
=
17;
N4
=
14;
Ne
=
N1
+
N2
+
N3
+
N4
+
1
Out[6]=
68
In[7]:=
Nss
=
3
*
Ne
Out[7]=
204
In[8]:=
D
L1
=
a
N1
;
D
L2
=
0.5
*
a
N2
;
D
L3
=
0.5
*
a
N3
;
D
L4
=
b
N4
;
Wektor przemieszczeñ uogólnionych i pomocniczy wektor numeracji
In[12]:=
Do
@8
wq
@
3
*
k
-
2
D =
qx
@
k
D
,
wq
@
3
*
k
-
1
D =
qy
@
k
D
,
wq
@
3
*
k
D = j@
k
D
<
,
8
k, 1, Ne
<D
In[13]:=
Do
@8
num
@
k
D =
k
<
,
8
k, 1, Nss
<D
In[14]:=
wq
@
1
D
Out[14]=
qx
@
1
D
In[15]:=
wq
@
2
D
Out[15]=
qy
@
1
D
In[16]:=
WQ
=
Array
@
wq, Nss
D
;
In[17]:=
NUM
=
Array
@
num, Nss
D
;
In[18]:=
MatrixForm
@
Transpose
@8
NUM, WQ
<DD
;
Wektor bezw³adnoœci
In[19]:=
k
=
1;
wA
@
3
*
k
-
2
D =
m1k;
wA
@
3
*
k
-
1
D =
m1k;
wA
@
3
*
k
D =
J1k;
Do
@8
wA
@
3
*
k
-
2
D =
m1;
wA
@
3
*
k
-
1
D =
m1;
wA
@
3
*
k
D =
J1;
<
,
8
k, 2, N1
<D
;
k
=
N1
+
1;
wA
@
3
*
k
-
2
D =
m12;
wA
@
3
*
k
-
1
D =
m12;
wA
@
3
*
k
D =
J12;
Do
@8
wA
@
3
*
k
-
2
D =
m2;
wA
@
3
*
k
-
1
D =
m2;
wA
@
3
*
k
D =
J2;
<
,
8
k, N1
+
2, N1
+
N2
<D
;
k
=
N1
+
N2
+
1;
wA
@
3
*
k
-
2
D =
m23;
wA
@
3
*
k
-
1
D =
m23;
wA
@
3
*
k
D =
J23;
Do
@8
wA
@
3
*
k
-
2
D =
m3;
wA
@
3
*
k
-
1
D =
m3;
wA
@
3
*
k
D =
J3;
<
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<D
;
k
=
N1
+
N2
+
N3
+
1;
wA
@
3
*
k
-
2
D =
m34;
wA
@
3
*
k
-
1
D =
m34;
wA
@
3
*
k
D =
J34;
Do
@8
wA
@
3
*
k
-
2
D =
m4;
wA
@
3
*
k
-
1
D =
m4;
wA
@
3
*
k
D =
J4;
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
-
1
<D
;
k
=
Ne;
wA
@
3
*
k
-
2
D =
m4k;
wA
@
3
*
k
-
1
D =
m4k;
wA
@
3
*
k
D =
J4k;
In[43]:=
WA
=
Array
@
wA, Nss
D
;
MatrixForm
@
Transpose
@8
NUM, WA
<DD
;
Energia potencjalna sprê¿ystoœci
2
proj_SES_moj.nb
In[45]:=
Ep
=
1
2
*
â
k
=
1
N1
I
CN1
*
H
xA
@
k
+
1
D -
xB
@
k
DL
2
+
CT1
*
H
yA
@
k
+
1
D -
yB
@
k
DL
2
+
CG1
*
Hj@
k
+
1
D - j@
k
DL
2
M +
â
k
=
N1
+
2
N1
+
N2
I
CN2
*
H
xA
@
k
+
1
D -
xB
@
k
DL
2
+
CT2
*
H
yA
@
k
+
1
D -
yB
@
k
DL
2
+
CG2
*
Hj@
k
+
1
D - j@
k
DL
2
M +
â
k
=
N1
+
N2
+
1
N1
+
N2
+
N3
-
1
I
CN3
*
H
xA
@
k
+
1
D -
xB
@
k
DL
2
+
CT3
*
H
yA
@
k
+
1
D -
yB
@
k
DL
2
+
CG3
*
Hj@
k
+
1
D - j@
k
DL
2
M +
â
k
=
N1
+
N2
+
N3
+
1
N1
+
N2
+
N3
+
N4
I
CN4
*
H
xA
@
k
+
1
D -
xB
@
k
DL
2
+
CT4
*
H
yA
@
k
+
1
D -
yB
@
k
DL
2
+
CG4
*
Hj@
k
+
1
D - j@
k
DL
2
M +
I
CN2
*
H
xA
@
N1
+
2
D -
yB
@
N1
+
1
DL
2
+
CT2
*
H
yA
@
N1
+
2
D +
xB
@
N1
+
1
DL
2
+
CG2
*
Hj@
N1
+
2
D - j@
N1
+
1
DL
2
M +
I
CN4
*
H
yA
@
N1
+
N2
+
N3
+
1
D -
xB
@
N1
+
N2
+
N3
DL
2
+
CT4
*
H
xA
@
N1
+
N2
+
N3
+
1
D +
yB
@
N1
+
N2
+
N3
DL
2
+
CG4
*
Hj@
N1
+
N2
+
N3
+
1
D - j@
N1
+
N2
+
N3
DL
2
M +
I
CN1u
*
xA
@
1
D
2
+
CT1u
*
yA
@
1
D
2
+
CG1u
* j
@
1
D
2
M +
I
CN4p
*
xB
@
Ne
D
2
+
CT4p
*
yB
@
Ne
D
2
+
CG4p
* j
@
Ne
D
2
M
;
Przemieszczenia punktów zamocowania ES
In[46]:=
k
=
1;
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L1
4
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L1
4
* j
@
k
D
;
Do
A9
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L1
2
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L1
2
* j
@
k
D
;
=
,
8
k, 2, N1
<E
;
k
=
N1
+
1;
pA1
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<9
a
-
D
L1
2
-
xC12,
-
yC12, 0
=
;
pB1
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<9
a
-
xC12,
D
L2
2
-
yC12, 0
=
;
pD1
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<8
a
-
xC12,
-
yC12, 0
<
;
xA
@
k
D =
pA1
@@
1
DD
;
yA
@
k
D =
pA1
@@
2
DD
;
xB
@
k
D =
pB1
@@
1
DD
;
yB
@
k
D =
pB1
@@
2
DD
;
xD
@
k
D =
pD1
@@
1
DD
;
yD
@
k
D =
pD1
@@
2
DD
;
Do
A9
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L2
2
* j
@
k
D
;
;
proj_SES_moj.nb
3
In[46]:=
yB
@
k
D =
qy
@
k
D +
D
L2
2
* j
@
k
D
;
=
,
8
k, N1
+
2, N1
+
N2
<E
;
k
=
N1
+
N2
+
1;
D
L23
=
D
L2
+ D
L3
2
;
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L23
2
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L23
2
* j
@
k
D
;
Do
A9
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L3
2
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L3
2
* j
@
k
D
;
=
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<E
;
k
=
N1
+
N2
+
N3
+
1;
pA2
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<9
a
-
xC34, a
-
D
L3
2
-
yC34, 0
=
;
pB2
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<9
a
+
D
L4
2
-
xC34, a
-
yC34, 0
=
;
pD2
=
8
qx
@
k
D
, qy
@
k
D
, 0
< + 8
0, 0,
j
@
k
D<8
a
-
xC34, a
-
yC34, 0
<
;
xA
@
k
D =
pA2
@@
1
DD
;
yA
@
k
D =
pA2
@@
2
DD
;
xB
@
k
D =
pB2
@@
1
DD
;
yB
@
k
D =
pB2
@@
2
DD
;
xD
@
k
D =
pD2
@@
1
DD
;
yD
@
k
D =
pD2
@@
2
DD
;
Do
A9
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L4
2
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L4
2
* j
@
k
D
;
=
,
8
k, N1
+
N2
+
N3
+
2, N1
+
N2
+
N3
+
N4
<E
;
k
=
Ne;
xA
@
k
D =
qx
@
k
D
;
xB
@
k
D =
qx
@
k
D
;
yA
@
k
D =
qy
@
k
D -
D
L4
4
* j
@
k
D
;
yB
@
k
D =
qy
@
k
D +
D
L4
4
* j
@
k
D
;
Macierz sztywnoœci
In[86]:=
pEp
= ¶
8
WQ
<
Ep;
4
proj_SES_moj.nb
In[87]:=
Do
@8
Do
@8
mC
@
kw, kk
D =
Coefficient
@
pEp
@@
kw
DD
, WQ
@@
kk
DDD
<
,
8
kk, 1, Nss
<D
<
,
8
kw, 1, Nss
<D
In[88]:=
MC
=
Array
@
mC,
8
Nss, Nss
<D
;
MatrixForm
@
MC
D
;
Wspó³czynniki sztywnoœci
In[90]:=
CN1
=
EE
*
Ap
D
L1
;
CT1
=
GG
*
Ap
kt
* D
L1
;
CG1
=
EE
*
Jz
D
L1
;
CN2
=
EE
*
Ap
D
L2
;
CT2
=
GG
*
Ap
kt
* D
L2
;
CG2
=
EE
*
Jz
D
L2
;
CN3
=
EE
*
Ap
D
L3
;
CT3
=
GG
*
Ap
kt
* D
L3
;
CG3
=
EE
*
Jz
D
L3
;
CN4
=
EE
*
Ap
D
L4
;
CT4
=
GG
*
Ap
kt
* D
L4
;
CG4
=
EE
*
Jz
D
L4
;
In[102]:=
CN1u
=
5
*
CN1;
CT1u
=
5
*
CT1;
CG1u
=
5
*
CG1;
In[105]:=
CN4p
=
5
*
CN4;
CT4p
=
5
*
CT4;
CG4p
=
0;
Œrodki mas elementów “nieregularnych”
proj_SES_moj.nb
5
In[108]:=
xC1
=
a
-
D
L1
4
;
yC1
=
0;
A1
=
D
L1
2
*
hp;
xC2
=
a;
yC2
=
D
L2
4
;
A2
=
D
L2
2
*
hp;
A12
=
A1
+
A2;
xC12
=
xC1
*
A1
+
xC2
*
A2
A12
;
yC12
=
yC1
*
A1
+
yC2
*
A2
A12
;
xC23
=
a;
yC23
=
a
2
-
D
L2
2
+
D
L23
2
;
xC3
=
a;
yC3
=
a
-
D
L3
4
;
A3
=
D
L3
2
*
hp;
xC4
=
a
+
D
L4
4
;
yC4
=
a;
A4
=
D
L4
2
*
hp;
A34
=
A3
+
A4;
xC34
=
xC3
*
A3
+
xC4
*
A4
A34
;
yC34
=
yC3
*
A3
+
yC4
*
A4
A34
;
8
xC12, yC12
<
. dane
8
a, 0
<
. dane
8
xC23, yC23
<
. dane
8
a, a
2
<
. dane
8
xC34, yC34
<
. dane
8
a, a
<
. dane
Out[128]=
8
1.08649, 0.00172306
<
Out[129]=
8
1.1, 0
<
Out[130]=
8
1.1, 0.551541
<
Out[131]=
8
1.1, 0.55
<
Out[132]=
8
1.11889, 1.09802
<
Out[133]=
8
1.1, 1.1
<
Numeryczna wersja macierzy sztywnoœci
6
proj_SES_moj.nb
In[134]:=
numMC
=
MC
. dane;
MatrixForm
@
numMC
D
;
Masa i masowe momenty bezw³adnoœci
In[136]:=
m1
=
Ap
* D
L1
*
ro;
m2
=
Ap
* D
L2
*
ro;
m3
=
Ap
* D
L3
*
ro;
m4
=
Ap
* D
L4
*
ro;
m1k
=
m1
2;
m2k
=
m2
2;
m3k
=
m3
2;
m4k
=
m4
2;
m12
=
m1
+
m2
2
;
m23
=
m2
+
m3
2
;
m34
=
m3
+
m4
2
;
J1
=
m1
12
*
ID
L1
2
+
hp
2
M
;
J2
=
m2
12
*
ID
L2
2
+
hp
2
M
;
J3
=
m3
12
*
ID
L3
2
+
hp
2
M
;
J4
=
m4
12
*
ID
L4
2
+
hp
2
M
;
J1k
=
m1k
12
*
D
L1
2
2
+
hp
2
;
J2k
=
m2k
12
*
D
L2
2
2
+
hp
2
;
J3k
=
m3k
12
*
D
L3
2
2
+
hp
2
;
J4k
=
m4k
12
*
D
L4
2
2
+
hp
2
;
J12
=
J1k
+
m1k
*
IH
xC1
-
xC12
L
2
+
H
yC1
-
yC12
L
2
M +
J2k
+
m2k
*
IH
xC2
-
xC12
L
2
+
H
yC2
-
yC12
L
2
M
;
J23
=
m23
12
*
ID
L23
2
+
hp
2
M
;
J34
=
J3k
+
m3k
*
IH
xC3
-
xC34
L
2
+
H
yC3
-
yC34
L
2
M +
J4k
+
m4k
*
IH
xC4
-
xC34
L
2
+
H
yC4
-
yC34
L
2
M
;
In[158]:=
MatrixForm
@
WA
D
;
Zmodyfikowana macierz sztywnoœci
In[159]:=
Do
@8
Do
@8
zmC
@
kw, kk
D =
mC
@
kw, kk
D
wA
@
kw
D
<
,
8
kk, 1, Nss
<D
<
,
8
kw, 1, Nss
<D
In[160]:=
ZMC
=
Array
@
zmC,
8
Nss, Nss
<D
;
MatrixForm
@
ZMC
D
;
proj_SES_moj.nb
7
In[162]:=
numZMC
=
ZMC
. dane;
MatrixForm
@
numZMC
D
;
Wyznaczanie czêstoœci i postaci drgañ w³asnych ramy
In[164]:=
rozw
=
Eigensystem
@
numZMC
D
;
Kwadraty czêstoœci w³asnych
In[165]:=
KCW
=
rozw
@@
1
DD
;
In[166]:=
CW
=
KCW ;
Analiza pierwszej postaci drgañ w³asnych ramy
In[167]:=
nr
=
1;
nr2
=
Nss
-
nr
+
1;
In[169]:=
Ω =
CW
@@
nr2
DD
Out[169]=
168.526
In[170]:=
pos
=
rozw
@@
2, nr2
DD
;
In[171]:=
Do
@8
qx
@
k
D =
pos
@@
3
*
k
-
2
DD
,
qy
@
k
D =
pos
@@
3
*
k
-
1
DD
,
j
@
k
D =
pos
@@
3
*
k
DD
<
,
8
k, 1, Ne
<D
8
proj_SES_moj.nb
In[172]:=
k
=
1;
rama
@
k
D =
Line
@88
xA
@
k
D
, yA
@
k
D<
,
8D
L1
2
+
xB
@
k
D
, yB
@
k
D<<D
;
Do
@8
j
=
k
-
1;
sx
=
H
j
-
1
L * D
L1
+ D
L1
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, yA
@
k
D<
,
8
sx
+ D
L1
+
xB
@
k
D
, yB
@
k
D<<D
<
,
8
k, 2, N1
<D
;
k
=
N1
+
1;
rama
@
k
D =
Line
B::
a
-
D
L1
2
+
xA
@
k
D
, yA
@
k
D>
,
8
a
+
xD
@
k
D
, yD
@
k
D<
,
:
a
+
xB
@
k
D
,
D
L2
2
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
1
L
;
sy
=
H
j
-
1
L * D
L2
+ D
L2
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L2
+
xB
@
k
D<<D
<
,
8
k, N1
+
2, N1
+
N2
<D
;
k
=
N1
+
N2
+
1;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, a
2
- D
L2
2
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, a
2
+ D
L3
2
+
xB
@
k
D<<D
;
Do
@8
j
=
k
-
H
N1
+
N2
+
1
L
;
sy
=
a
2
+
H
j
-
1
L * D
L3
+ D
L3
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L3
+
xB
@
k
D<<D
<
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<D
;
k
=
N1
+
N2
+
N3
+
1;
rama
@
k
D =
Line
B::
a
+
xA
@
k
D
, a
-
D
L3
2
+
yA
@
k
D>
,
8
a
+
xD
@
k
D
, a
+
yD
@
k
D<
,
:
a
+
D
L4
2
+
xB
@
k
D
, a
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
N2
+
N3
+
1
L
;
sx
=
a
+
H
j
-
1
L * D
L4
+ D
L4
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
sx
+ D
L4
+
xB
@
k
D
, a
+
yB
@
k
D<<D
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
<D
;
k
=
Ne
+
1;
rama
@
k
D =
Line
@88
a
+
b
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
a
+
b
+
xB
@
k
D
, a
+
yB
@
k
D<<D
;
In[186]:=
RAMA1
=
Array
@
rama, Ne
D
. dane;
wr1
=
Graphics
@8
Green, RAMA1
<D
;
Analiza drugiej postaci drgañ w³asnych ramy
In[188]:=
nr
=
2;
nr2
=
Nss
-
nr
+
1;
proj_SES_moj.nb
9

In[190]:=
Ω =
CW
@@
nr2
DD
Out[190]=
679.389
In[191]:=
pos
=
rozw
@@
2, nr2
DD
;
In[192]:=
Do
@8
qx
@
k
D =
pos
@@
3
*
k
-
2
DD
,
qy
@
k
D =
pos
@@
3
*
k
-
1
DD
,
j
@
k
D =
pos
@@
3
*
k
DD
<
,
8
k, 1, Ne
<D
10
proj_SES_moj.nb
In[193]:=
k
=
1;
rama
@
k
D =
Line
@88
xA
@
k
D
, yA
@
k
D<
,
8D
L1
2
+
xB
@
k
D
, yB
@
k
D<<D
;
Do
@8
j
=
k
-
1;
sx
=
H
j
-
1
L * D
L1
+ D
L1
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, yA
@
k
D<
,
8
sx
+ D
L1
+
xB
@
k
D
, yB
@
k
D<<D
<
,
8
k, 2, N1
<D
;
k
=
N1
+
1;
rama
@
k
D =
Line
B::
a
-
D
L1
2
+
xA
@
k
D
, yA
@
k
D>
,
8
a
+
xD
@
k
D
, yD
@
k
D<
,
:
a
+
xB
@
k
D
,
D
L2
2
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
1
L
;
sy
=
H
j
-
1
L * D
L2
+ D
L2
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L2
+
xB
@
k
D<<D
<
,
8
k, N1
+
2, N1
+
N2
<D
;
k
=
N1
+
N2
+
1;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, a
2
- D
L2
2
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, a
2
+ D
L3
2
+
xB
@
k
D<<D
;
Do
@8
j
=
k
-
H
N1
+
N2
+
1
L
;
sy
=
a
2
+
H
j
-
1
L * D
L3
+ D
L3
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L3
+
xB
@
k
D<<D
<
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<D
;
k
=
N1
+
N2
+
N3
+
1;
rama
@
k
D =
Line
B::
a
+
xA
@
k
D
, a
-
D
L3
2
+
yA
@
k
D>
,
8
a
+
xD
@
k
D
, a
+
yD
@
k
D<
,
:
a
+
D
L4
2
+
xB
@
k
D
, a
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
N2
+
N3
+
1
L
;
sx
=
a
+
H
j
-
1
L * D
L4
+ D
L4
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
sx
+ D
L4
+
xB
@
k
D
, a
+
yB
@
k
D<<D
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
<D
;
k
=
Ne
+
1;
rama
@
k
D =
Line
@88
a
+
b
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
a
+
b
+
xB
@
k
D
, a
+
yB
@
k
D<<D
;
In[207]:=
RAMA2
=
Array
@
rama, Ne
D
. dane;
wr2
=
Graphics
@8
Red, RAMA2
<D
;
Analiza trzeciej postaci drgañ w³asnych ramy
In[209]:=
nr
=
3;
nr2
=
Nss
-
nr
+
1;
proj_SES_moj.nb
11

In[211]:=
Ω =
CW
@@
nr2
DD
Out[211]=
1154.11
In[212]:=
pos
=
rozw
@@
2, nr2
DD
;
In[213]:=
Do
@8
qx
@
k
D =
pos
@@
3
*
k
-
2
DD
,
qy
@
k
D =
pos
@@
3
*
k
-
1
DD
,
j
@
k
D =
pos
@@
3
*
k
DD
<
,
8
k, 1, Ne
<D
12
proj_SES_moj.nb
In[214]:=
k
=
1;
rama
@
k
D =
Line
@88
xA
@
k
D
, yA
@
k
D<
,
8D
L1
2
+
xB
@
k
D
, yB
@
k
D<<D
;
Do
@8
j
=
k
-
1;
sx
=
H
j
-
1
L * D
L1
+ D
L1
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, yA
@
k
D<
,
8
sx
+ D
L1
+
xB
@
k
D
, yB
@
k
D<<D
<
,
8
k, 2, N1
<D
;
k
=
N1
+
1;
rama
@
k
D =
Line
B::
a
-
D
L1
2
+
xA
@
k
D
, yA
@
k
D>
,
8
a
+
xD
@
k
D
, yD
@
k
D<
,
:
a
+
xB
@
k
D
,
D
L2
2
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
1
L
;
sy
=
H
j
-
1
L * D
L2
+ D
L2
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L2
+
xB
@
k
D<<D
<
,
8
k, N1
+
2, N1
+
N2
<D
;
k
=
N1
+
N2
+
1;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, a
2
- D
L2
2
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, a
2
+ D
L3
2
+
xB
@
k
D<<D
;
Do
@8
j
=
k
-
H
N1
+
N2
+
1
L
;
sy
=
a
2
+
H
j
-
1
L * D
L3
+ D
L3
2;
rama
@
k
D =
Line
@88
a
-
yA
@
k
D
, sy
+
xA
@
k
D<
,
8
a
-
yB
@
k
D
, sy
+ D
L3
+
xB
@
k
D<<D
<
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<D
;
k
=
N1
+
N2
+
N3
+
1;
rama
@
k
D =
Line
B::
a
+
xA
@
k
D
, a
-
D
L3
2
+
yA
@
k
D>
,
8
a
+
xD
@
k
D
, a
+
yD
@
k
D<
,
:
a
+
D
L4
2
+
xB
@
k
D
, a
+
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
N2
+
N3
+
1
L
;
sx
=
a
+
H
j
-
1
L * D
L4
+ D
L4
2;
rama
@
k
D =
Line
@88
sx
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
sx
+ D
L4
+
xB
@
k
D
, a
+
yB
@
k
D<<D
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
<D
;
k
=
Ne
+
1;
rama
@
k
D =
Line
@88
a
+
b
+
xA
@
k
D
, a
+
yA
@
k
D<
,
8
a
+
b
+
xB
@
k
D
, a
+
yB
@
k
D<<D
;
In[228]:=
RAMA3
=
Array
@
rama, Ne
D
. dane;
wr3
=
Graphics
@8
Blue, RAMA3
<D
;
In[230]:=
belka0
=
Graphics
@8
Black, Line
@88
0, 0
<
,
8
a, 0
<
,
8
a, a
<
,
8
a
+
b, a
<<D
<D
. dane;
proj_SES_moj.nb
13
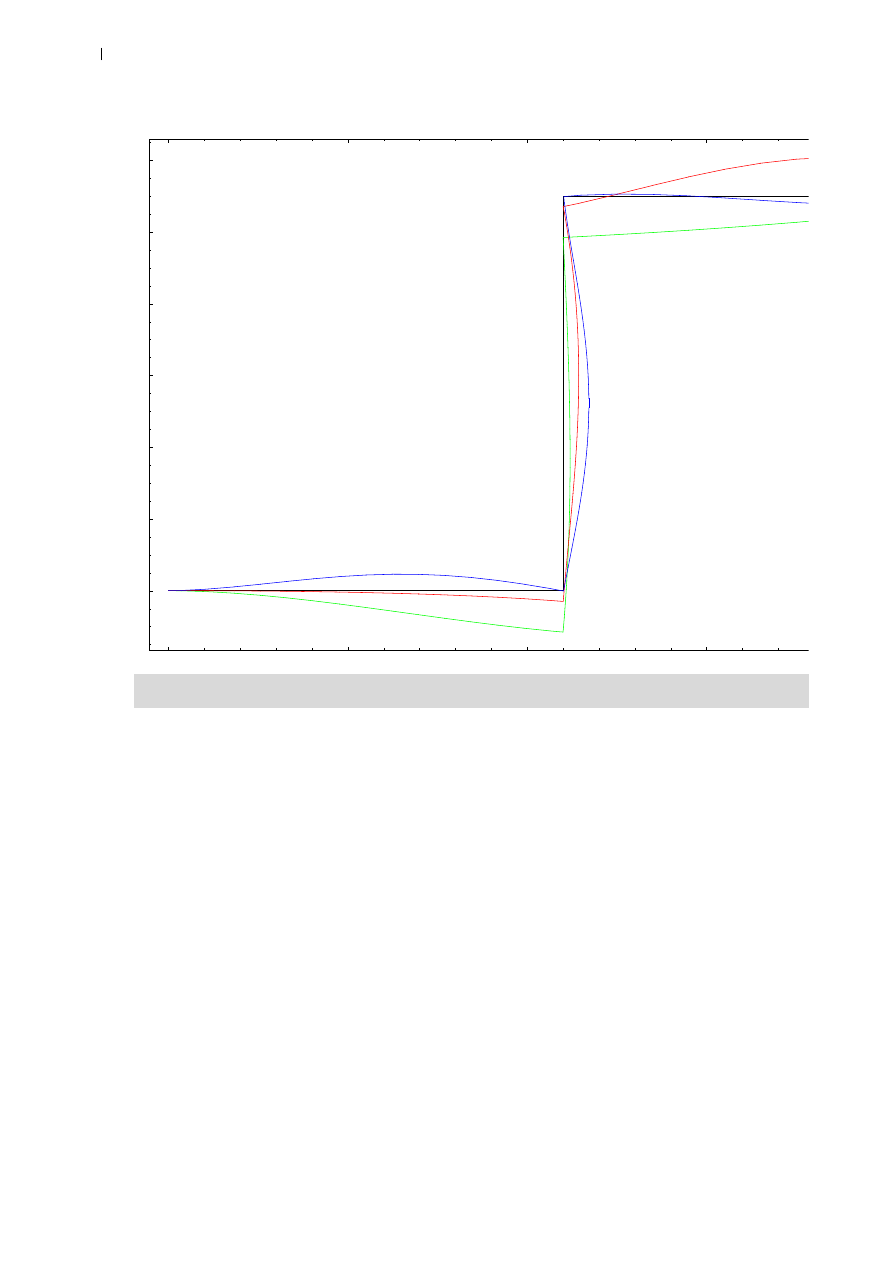
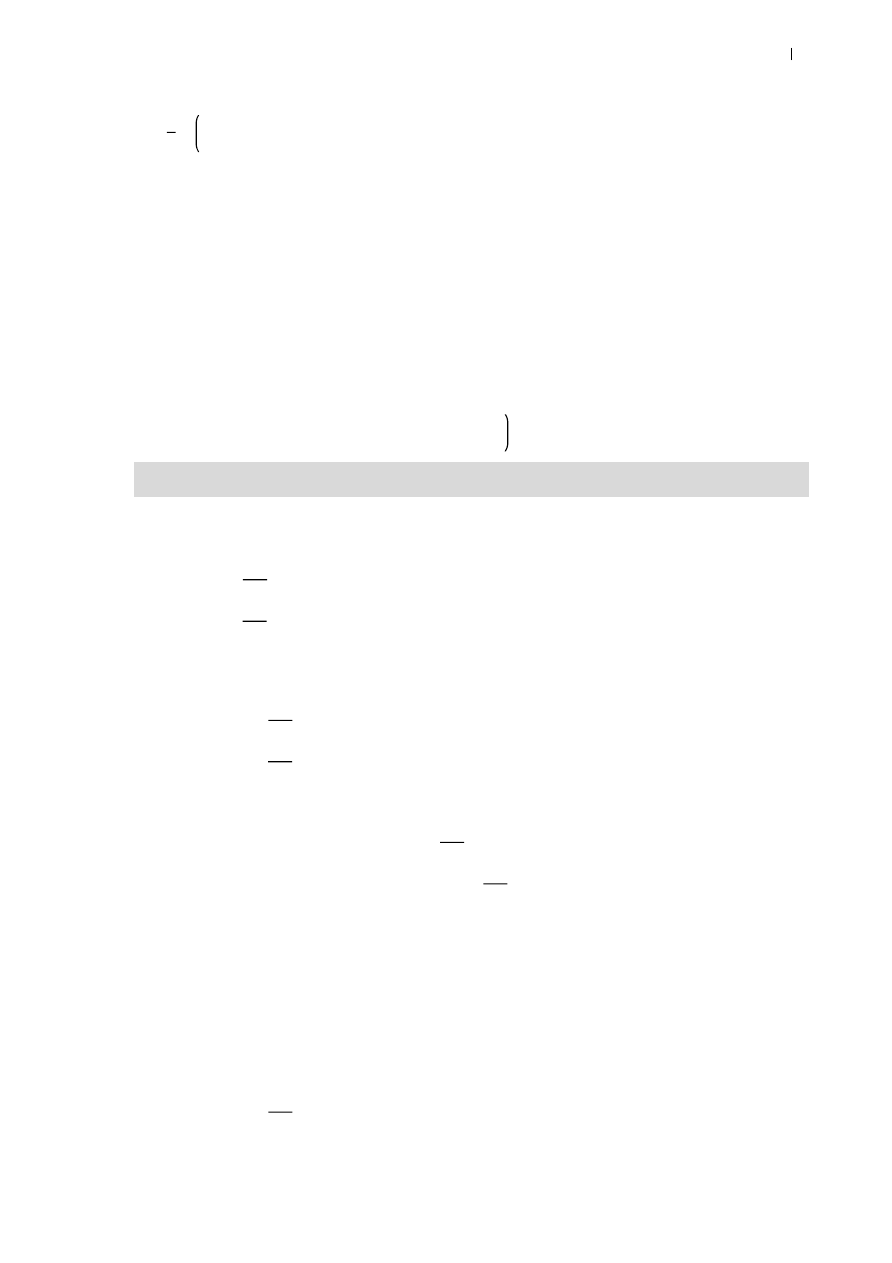
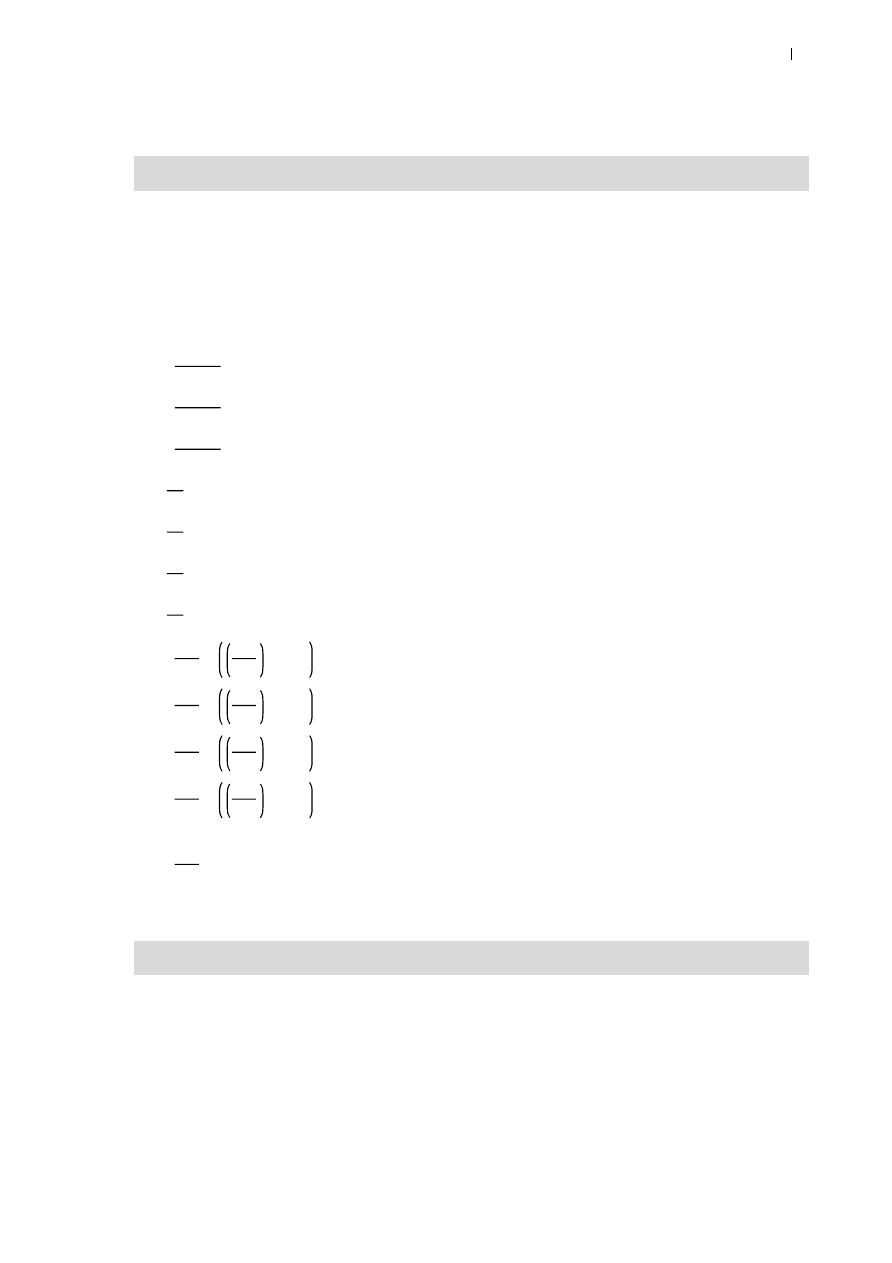
In[231]:=
Show
@8
belka0, wr1, wr2, wr3
<
, Frame
®
True
D
Out[231]=
0.0
0.5
1.0
1.5
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Ugiêcie statyczne
In[232]:=
Do
@8
wp
@
3
*
k
-
2
D =
fx
@
k
D
,
wp
@
3
*
k
-
1
D =
fy
@
k
D
,
wp
@
3
*
k
D =
m
j
@
k
D
<
,
8
k, 1, Ne
<D
In[233]:=
WP
=
Array
@
wp, Nss
D
;
MatrixForm
@
Transpose
@8
NUM, WP
<DD
;
14
proj_SES_moj.nb
In[235]:=
Do
@8
fx
@
k
D =
0;
fy
@
k
D =
0;
m
j
@
k
D =
0;
<
,
8
k, 1, Ne
<D
fy
@
1
D = -
q
*
D
L1
2
;
Do
@8
fy
@
k
D = -
q
* D
L1;
<
,
8
k, 2, N1
<D
;
fy
@
N1
+
1
D = -
q
*
D
L1
2
;
fy
@
N1
+
N2
+
1
D = -
F;
fy
@
N1
+
N2
+
N3
+
1
D = -
q
*
D
L4
2
;
Do
@8
fy
@
k
D = -
q
* D
L4;
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
<D
;
fy
@
Ne
+
1
D = -
q
*
D
L4
2
;
In[243]:=
MatrixForm
@
Transpose
@8
NUM, WP
<DD
;
Numeryczna postaæ wektora si³ uogólnionych
In[244]:=
numWP
=
WP
. dane;
MatrixForm
@
numWP
D
;
Wyznaczenie statycznego ugiêcia ramy
In[246]:=
WQs
=
LinearSolve
@
numMC, numWP
D
;
In[247]:=
Do
@8
qx
@
k
D =
WQs
@@
3
*
k
-
2
DD
,
qy
@
k
D =
WQs
@@
3
*
k
-
1
DD
,
j
@
k
D =
WQs
@@
3
*
k
DD
<
,
8
k, 1, Ne
<D
In[248]:=
sk
=
10;
proj_SES_moj.nb
15
In[249]:=
k
=
1;
rama4
@
k
D =
Line
@88
sk
*
xA
@
k
D
, sk
*
yA
@
k
D<
,
8D
L1
2
+
sk
*
xB
@
k
D
, sk
*
yB
@
k
D<<D
;
Do
@8
j
=
k
-
1;
sx
=
H
j
-
1
L * D
L1
+ D
L1
2;
rama4
@
k
D =
Line
@88
sx
+
sk
*
xA
@
k
D
, sk
*
yA
@
k
D<
,
8
sx
+ D
L1
+
sk
*
xB
@
k
D
, sk
*
yB
@
k
D<<D
<
,
8
k, 2, N1
<D
;
k
=
N1
+
1;
rama4
@
k
D =
Line
B::
a
-
D
L1
2
+
sk
*
xA
@
k
D
, sk
*
yA
@
k
D>
,
8
a
+
sk
*
xD
@
k
D
, sk
*
yD
@
k
D<
,
:
a
+
sk
*
xB
@
k
D
,
D
L2
2
+
sk
*
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
1
L
;
sy
=
H
j
-
1
L * D
L2
+ D
L2
2;
rama4
@
k
D =
Line
@88
a
-
sk
*
yA
@
k
D
, sy
+
sk
*
xA
@
k
D<
,
8
a
-
sk
*
yB
@
k
D
, sy
+ D
L2
+
sk
*
xB
@
k
D<<D
<
,
8
k, N1
+
2, N1
+
N2
<D
;
k
=
N1
+
N2
+
1;
rama4
@
k
D =
Line
@88
a
-
sk
*
yA
@
k
D
, a
2
- D
L2
2
+
sk
*
xA
@
k
D<
,
8
a
-
sk
*
yB
@
k
D
, a
2
+ D
L3
2
+
sk
*
xB
@
k
D<<D
;
Do
@8
j
=
k
-
H
N1
+
N2
+
1
L
;
sy
=
a
2
+
H
j
-
1
L * D
L3
+ D
L3
2;
rama4
@
k
D =
Line
@88
a
-
sk
*
yA
@
k
D
, sy
+
sk
*
xA
@
k
D<
,
8
a
-
sk
*
yB
@
k
D
, sy
+ D
L3
+
sk
*
xB
@
k
D<<D
<
,
8
k, N1
+
N2
+
2, N1
+
N2
+
N3
<D
;
k
=
N1
+
N2
+
N3
+
1;
rama4
@
k
D =
Line
B::
a
+
sk
*
xA
@
k
D
, a
-
D
L3
2
+
sk
*
yA
@
k
D>
,
8
a
+
sk
*
xD
@
k
D
, a
+
sk
*
yD
@
k
D<
,
:
a
+
D
L4
2
+
sk
*
xB
@
k
D
, a
+
sk
*
yB
@
k
D>>F
;
Do
@8
j
=
k
-
H
N1
+
N2
+
N3
+
1
L
;
sx
=
a
+
H
j
-
1
L * D
L4
+ D
L4
2;
rama4
@
k
D =
Line
@88
sx
+
sk
*
xA
@
k
D
, a
+
sk
*
yA
@
k
D<
,
8
sx
+ D
L4
+
sk
*
xB
@
k
D
, a
+
sk
*
yB
@
k
D<<D
<
,
8
k, N1
+
N2
+
N3
+
2, Ne
<D
;
k
=
Ne
+
1;
rama4
@
k
D =
Line
@88
a
+
b
+
sk
*
xA
@
k
D
, a
+
sk
*
yA
@
k
D<
,
8
a
+
b
+
sk
*
xB
@
k
D
, a
+
sk
*
yB
@
k
D<<D
;
In[263]:=
RAMA4
=
Array
@
rama4, Ne
D
. dane;
16
proj_SES_moj.nb
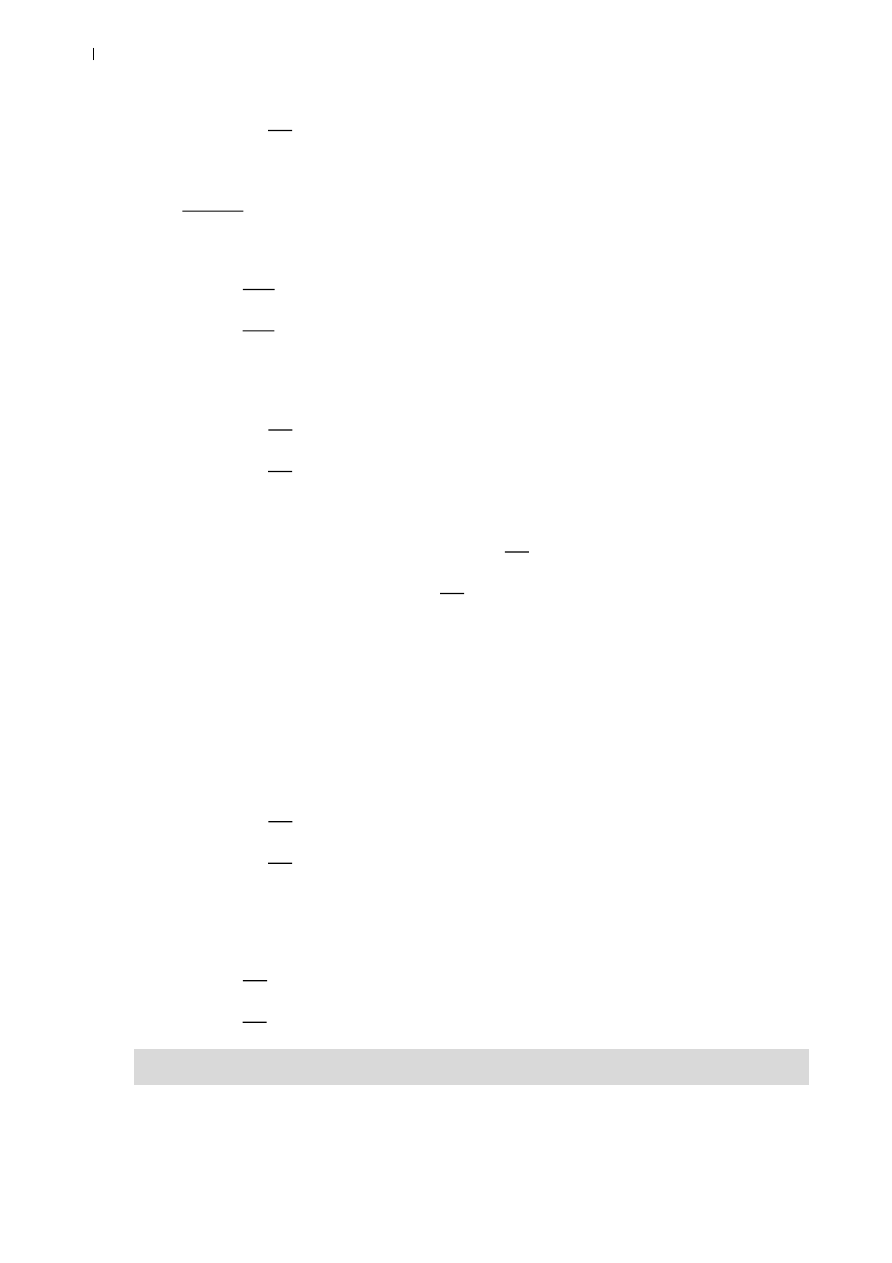
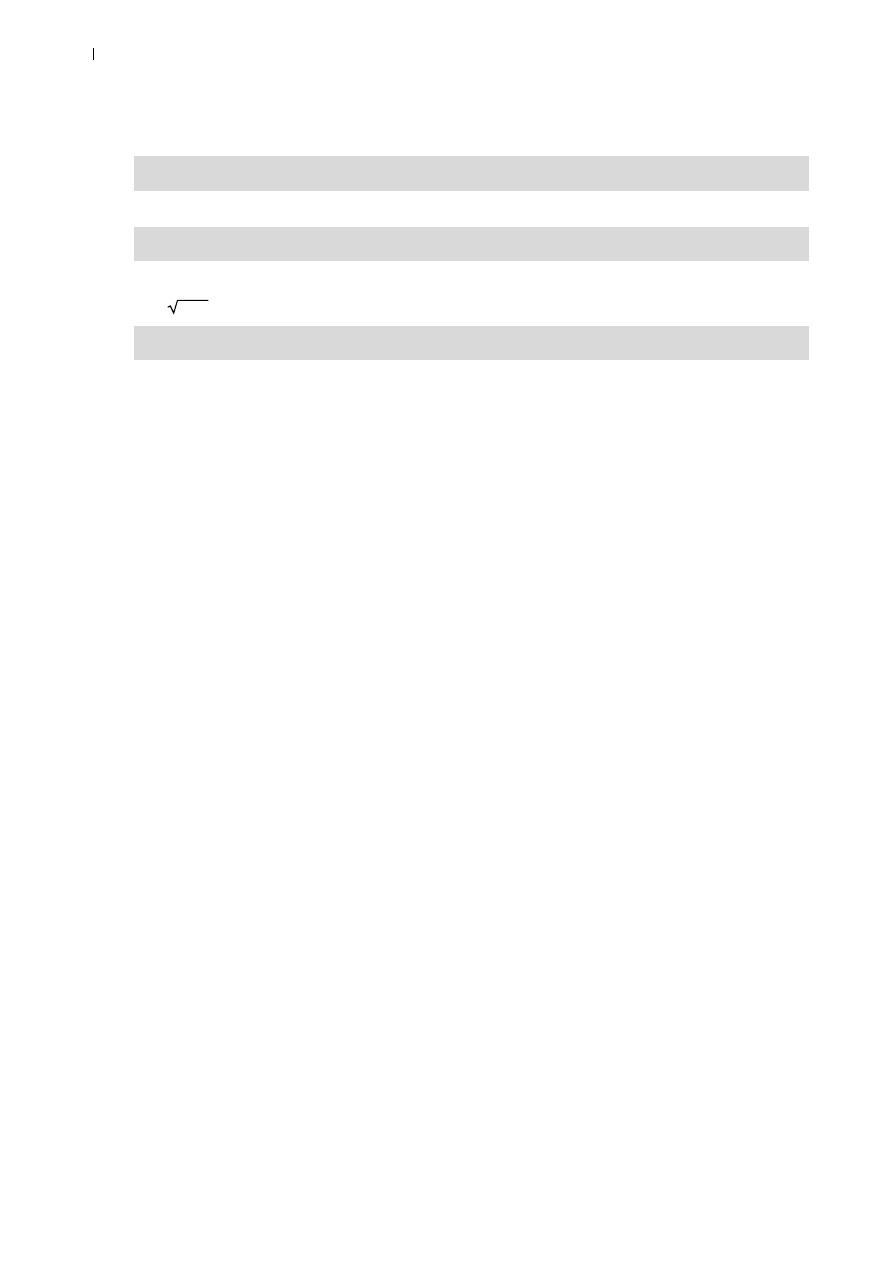
In[264]:=
Show
@
belka0, Graphics
@8
Red, RAMA4
<D
, Frame
®
True
D
Out[264]=
0.0
0.5
1.0
1.5
2.0
2.5
0.0
0.2
0.4
0.6
0.8
1.0
proj_SES_moj.nb
17
Wyszukiwarka
Podobne podstrony:
projekt oczyszczalni sciekow-1, urządzenia do uzdatniania i oczyszcz.ścieków, ćwiczenia, Oczyszczaln
moj przenosnik, Transport Polsl Katowice, 6 semestr, Studia 6, Materiały Jacek, Środki transportu, p
ANIA budowle proj moj sem 6
moj proj, zloz
moj projekt 2, Transport Polsl Katowice, 6 semestr, Studia 6, Materiały Jacek, Środki transportu, pr
mój projekt, IŚ Tokarzewski 27.06.2016, V semestr ISiW, Kanalizacje, ćw proj, projekty Miszta-Kruk,
projekt 2 mój, IŚ Tokarzewski 27.06.2016, V semestr ISiW, Kanalizacje, ćw proj, projekty Miszta-Kruk
bk mój proj(2)
moj proj, wal wyk 1
instalecje proj. mój, Budownictwo UTP, semestr 4, Instalacje bud
mapy do celow proj
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
cz 1, Matlab moj
Mój świat samochodów
82 Dzis moj zenit moc moja dzisiaj sie przesili przeslanie monologu Konrada
moj 2008 09
Proj syst log wykl 6
Mój region w średniowieczu
więcej podobnych podstron