Ruchliwość układów
Ruchliwość układów
kinematycznych
kinematycznych
Iwona
Iwona
Fonfara
Fonfara
Pojęcia podstawowe
Pojęcia podstawowe
•
Za układ kinematyczny uważa się dowolny zespół
elementów (członów) połączonych ze sobą (parami
kinematycznymi) w sposób umożliwiający ich ruch
względny.
•
Układem kinematycznym jest np. układ kostny
człowieka, którego człony (kości) są połączone ze
sobą przegubami (stawami) i wraz z mięśniami i
więzadłami umożliwiają nam chodzenie, bieganie,
itp.
Pojęcia podstawowe
Pojęcia podstawowe
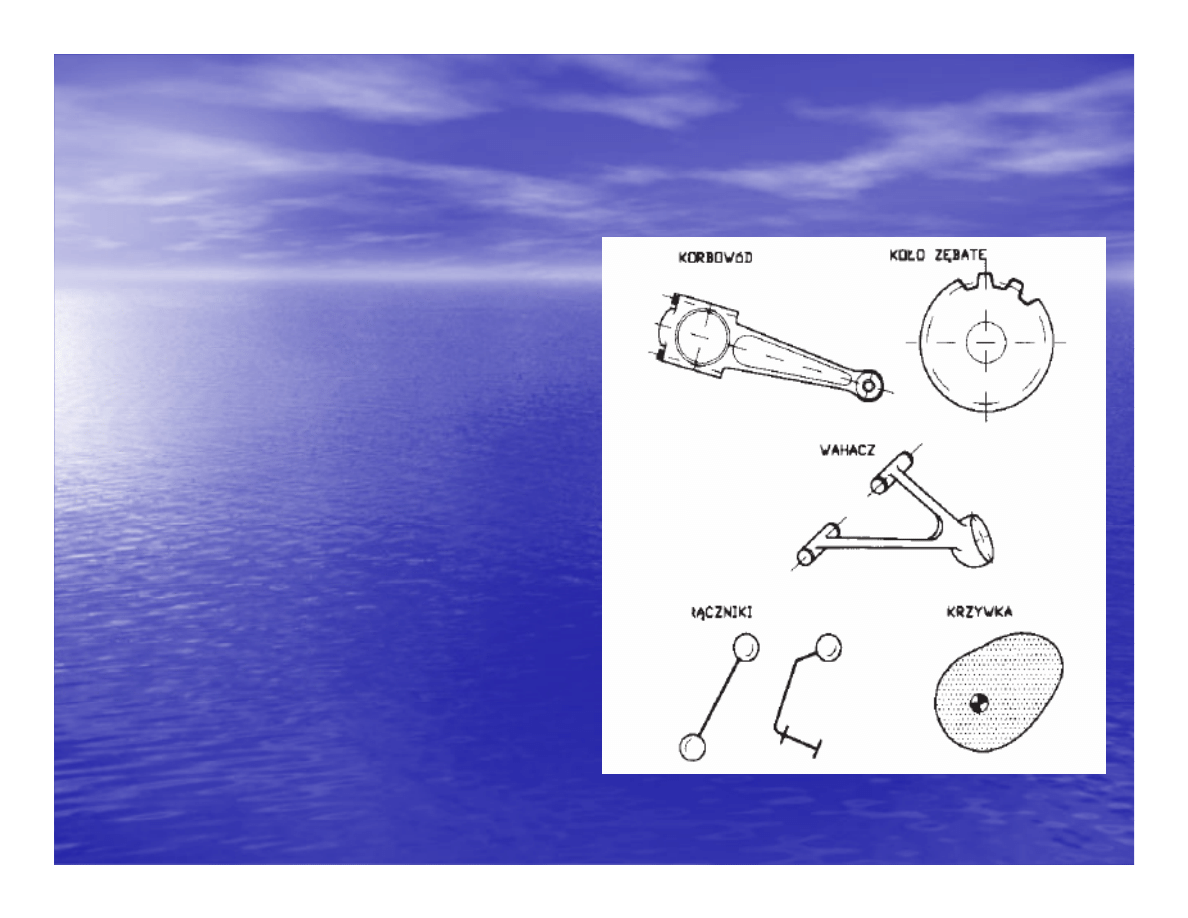
•
Człon – element układu
kinematycznego, który
wchodzi w ruchowe
połączenia z innymi
układami
.
.
Pojęcia podstawowe
Pojęcia podstawowe
•
Pary kinematyczne – ruchowe połączenie dwóch
(para) członów, połączenie dające łączonym członom
możliwość wykonywania ruchów względnych.
•
Mają zapewnić pożądany ruch względny, a
jednocześnie muszą mieć zdolność przenoszenia sił
towarzyszących ruchowi członów.
Pojęcia podstawowe
Pojęcia podstawowe
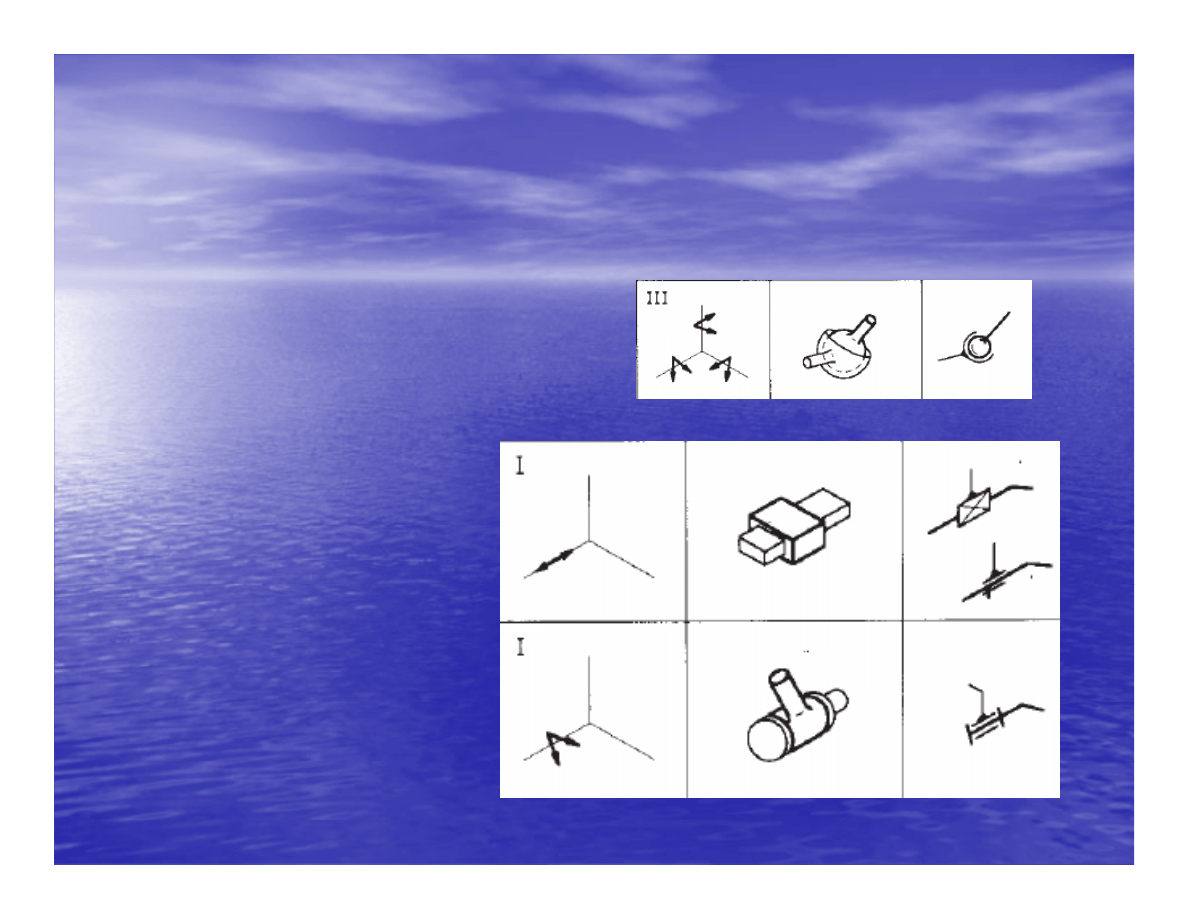
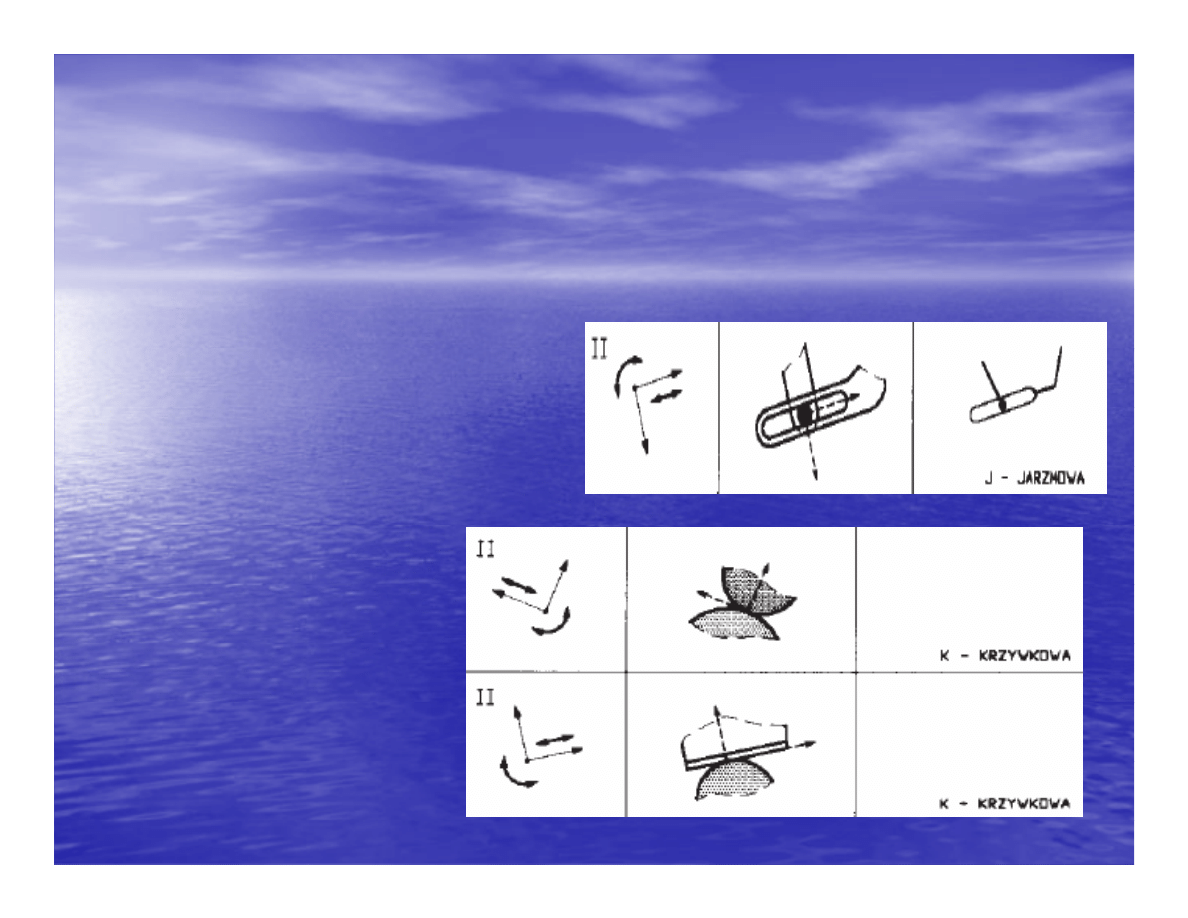
Podział par kinematycznych :
•
wg liczby stopni swobody, jaką w danej parze
dysponują względem siebie człony ją tworzące
– podział na klasy;
•
wg rodzaju styku tworzących ją członów –
podział na pary niższe i wyższe.
Pojęcia podstawowe
Pojęcia podstawowe
•
Para kinematyczna
niższa – gdzie człony
kontaktują się
powierzchniami.
Pojęcia podstawowe
Pojęcia podstawowe
•
Para kinematyczna
wyższa – tworzą styk
punktowy lub liniowy.
Pojęcia podstawowe
Pojęcia podstawowe
•
Łańcuch kinematyczny – zespół członów
połączonych parami kinematycznymi.
•
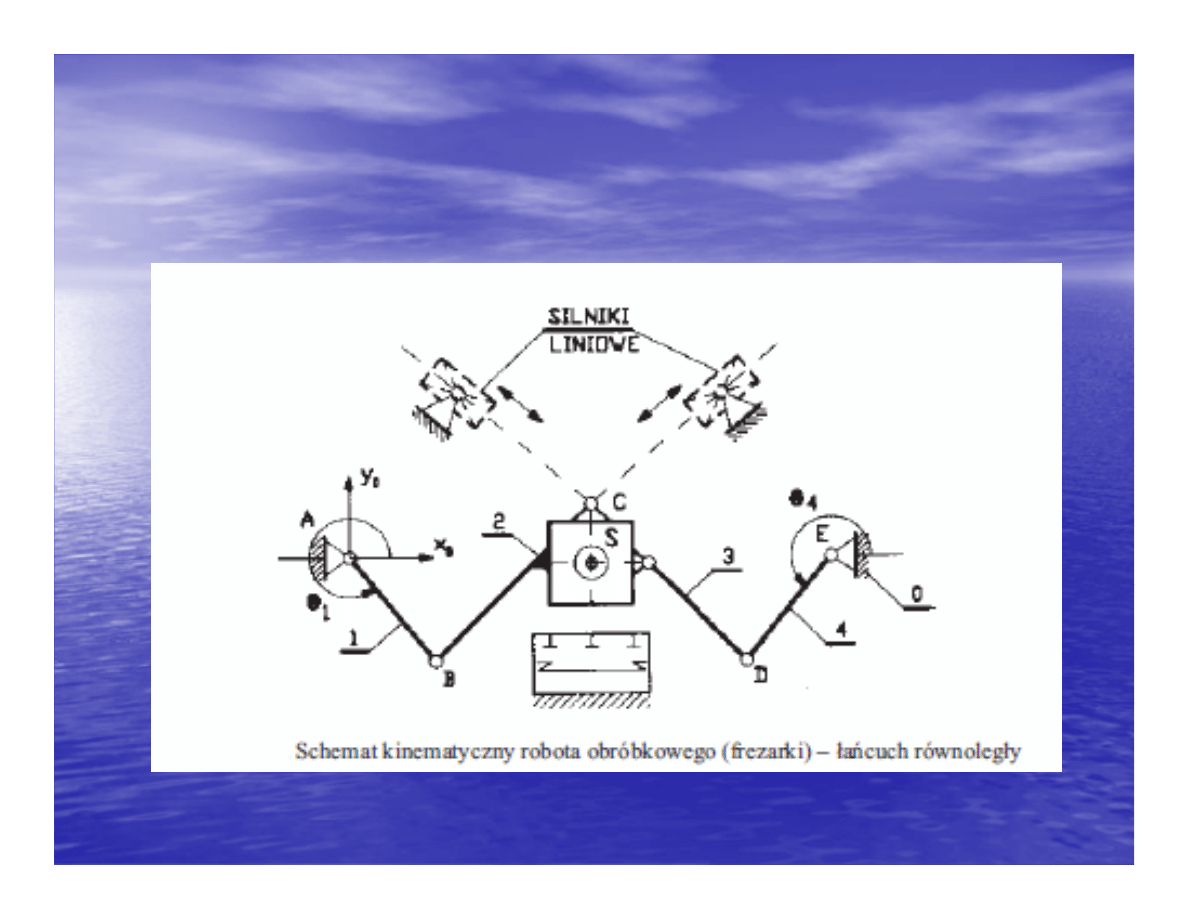
Mechanizm – łańcuch kinematyczny, którego
jeden z członów jest podstawą.
Własności ruchowe
Własności ruchowe
•
człony układu kinematycznego powinny być
połączone parami kinematycznymi tak, aby możliwy
był ich ruch względny;
•
w różnych układach potrzebne są różne liczby
napędów niezbędnych do wywołania potrzebnego
ruchu.
Możliwość ruchu względnego w połączeniu z liczbą
wymaganych napędów są określane jako własności
ruchowe układów kinematycznych.
Ruchliwość układu kinematycznego
Ruchliwość układu kinematycznego
•
Liczba stopni swobody względem nieruchomej
podstawy, którą posiada dowolny układ członów jest
miarą jego ruchliwości.
•
Ruchliwością mechanizmu nazywamy liczbę więzów,
które należałoby narzucić na człony, aby łańcuch
kinematyczny mechanizmu był nieruchomy
względem podstawy. Jest to zatem liczba stopni
swobody mechanizmu względem podstawy.
Ruchliwość układu kinematycznego
Ruchliwość układu kinematycznego
Ruchliwość „w” może być :
•
w = 0 lub w < 0 – układ sztywny
•
w = 1 – układ normalny
•
w > 1 – układ swobodny
Ruchliwość teoretyczna
Ruchliwość teoretyczna
•
Wynika z faktu, że jest ona wyznaczana
wyłącznie na podstawie parametrów
strukturalnych układów kinematycznych, tj.
liczby członów i par kinematycznych
poszczególnych klas.
Ruchliwość teoretyczna
Ruchliwość teoretyczna
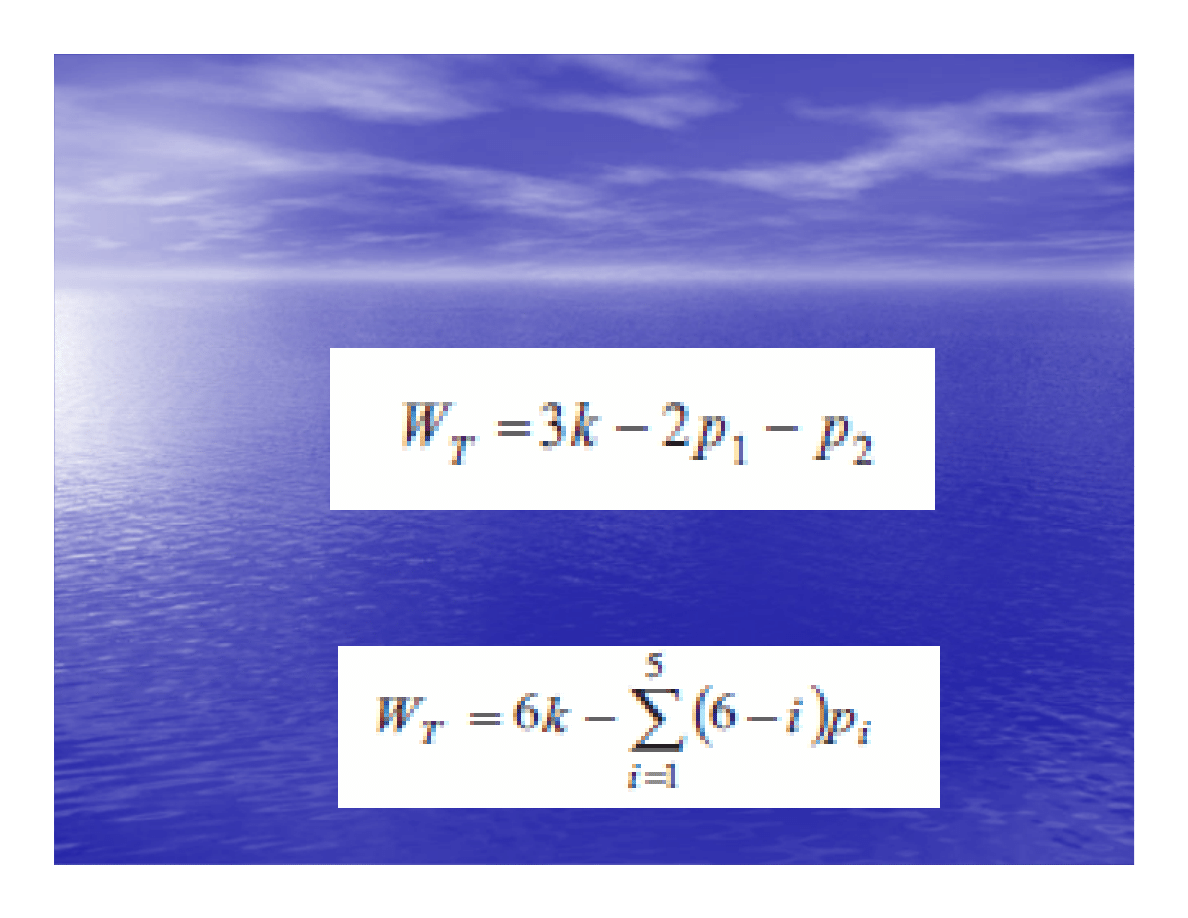
•
dla układów płaskich :
•
dla układów przestrzennych :
Ruchliwość teoretyczna
Ruchliwość teoretyczna
•
człony ruchome w liczbie k przed ich połączeniem w
ukł. kin. dysponują łącznie na płaszczyźnie stopniami
swobody w liczbie 3k (każdy człon swobodny ma na
płaszczyźnie 3 stopnie swobody);
•
utworzenie par kin. I klasy w liczbie p1 oznacza, że
odbieramy członom ruchomym 2p1 stopni swobody
(w każdej parze I klasy pozostaje jedna możliwość
ruchu);
Ruchliwość teoretyczna
Ruchliwość teoretyczna
•
utworzenie par kin. II klasy w liczbie p2
oznacza, że odbieramy członom ruchomym p2
stopni swobody (w każdej parze II klasy
pozostają dwie możliwości ruchu);
•
w układach płaskich mogą wystąpić tylko pary
kin. I i II klasy, gdyż z trzech stopni swobody
można odebrać co najwyżej dwa.
Ruchliwość teoretyczna
Ruchliwość teoretyczna
W układach przestrzennych rozumowanie jest
identyczne, tylko liczba stopni swobody
pojedynczego członu swobodnego wynosi 6, a
wiec utworzenie każdej z par i-tej klasy
oznacza zredukowanie ogólnej liczby 6k
stopni swobody każdorazowo o (6-i)pi.
Ruchliwość teoretyczna
Ruchliwość teoretyczna
Ruchliwość lokalna
Ruchliwość lokalna
Możliwość wykonywania przez człon takiego
ruchu, który nie wpływa na ruch całego
układu. Oznacza to inaczej, że w przypadku
wystąpienia ruchliwości lokalnej określonego
członu może on wykonywać ruch przy
unieruchomieniu pozostałych członów układu,
włącznie z tymi, które łączą się z nimi parami
kinematycznymi.
Ruchliwość rzeczywista
Ruchliwość rzeczywista
W wypadku wystąpienia ruchliwości lokalnej
Wl, obliczona ruchliwość teoretyczna nie
oddaje stanu faktycznego. Jest to cecha
wszystkich układów, a więc należy rozróżniać
ruchliwość rzeczywistą Wr od ruchliwości
teoretycznej Wt wg zależności:
Wr= Wt - Wl
Ruchliwość rzeczywista
Ruchliwość rzeczywista
Każdy człon i każda para układu kinematycznego
wnosi do układu więzy, tj. ogranicza wzajemne ruchy
członów.
Wprowadza się kolejną poprawkę na ruchliwość
rzeczywistą :
Wr = Wt – Wl – Wb,
gdzie Wb – liczba więzów biernych.
Wyszukiwarka
Podobne podstrony:
charakterystyka ukladow kinematycznych napedu i sterowania obrabiarek ogolnego przeznaczenia druk la
Kinematyka i Dynamika Układów Mechatronicznych
IV.13.14.15 Metody numeryczne rozwiązywania układów liniowyc, IV
Analiza kinematyczna płaskich układów prętowych
311[15] O2 01 Analizowanie układów elektrycznych i elektronicznych
15 Wykonywanie obsługi i konserwacji układów automatyki
311[15] Z2 04 Eksploatowanie układów sterowania, sygnalizacji i łączności
2014 Zagadnienia na egzamin Kinematyka i Dynamika Układów Mechatro
Kinematyka i Dynamika Układów Mechatronicznych
15 Wykonywanie obsługi i konserwacji układów automatyki
Rozwiązywanie układów równań
więcej podobnych podstron