IV. 13. Metody numeryczne rozwiązywania układów liniowych równań algebraicznych.
1. Metody bezpośrednie:
oznaczenia :
E1 a11x1 + a12x2 +...+ a1nxn = b1
E2 a21x1 + a22x2 +...+ a2nxn = b2
* Ax = b
E1 a31x1 + a32x2 +...+ a3nxn = b3
rozwiązanie jest jednoznaczne gdy:
b ≠ 0 i det(A) ≠ 0
Gaussa (eliminacji) - polega na sprowadzeniu równania Ax = b
do postaci górnotrójkątnej Ux = (b)<n>
U - macierz otrzymana w wyniku wykonania n operacji elementarnych na macierzy A
(b)<n> - wektor otrzymany w wyniku wykonania n operacji elementarnych ba
Def. Operacja elementarna nie zmienia wyniku równania np:
λEi → Ei λ ≠ 0
Ei +λEj → Ei
Ei ,Ej -wiersze równania.
Postępowanie wprzód
krok 1
krok 2 działanie

krok 3 działanie
koniec postępowania wprzód.
Postępowanie wstecz:

![]()
itd...
jeśli na przekątnej macierzy A znajduje się 0 to procedura zostaje przerwana.
Def. Macierz A nazywamy macierzą z silnie dominującą przekątną główną jeśli

Def. Macierz A nazywamy dodatnio określoną jeśli forma kwadratowa
xTAx > 0 dla dowolnego x=0
Tw. Gdy macierz A ma silnie dominującą przekątną główną jest nieosobliwa. Jest to warunek wystarczający.
Ponadto rozwiązanie równania Ax =b można otrzymać metodą Gaussa bez zmiany kolejnści wierszy i kolumn i rozwiązanie jest silnie stabilne ze wzgl edu na wzrost błędu zaokrąglenia.
Tw. Gdy macierz A jest dodatnio określona to jest nieosobliwa. Jest to warunek wystarczający. Ponadto rozwiązanie równania Ax =b można otrzymać metodą Gaussa bez zmiany kolejnści wierszy i kolumn i rozwiązanie jest silnie stabilne ze wzgl edu na wzrost błędu zaokrąglenia.
Tw. Silwestra. Macierz A jest dodatnio określona jeśli ma wszystkie wartości wlasne WKW
1.2. Metoda Gaussa z częściowym wyborem elementu wiodącego.
k
m szukamy p elementu wiodącego
k z warunku :
apk = maxaik
0_ ... p i = k....m
przestawiamy Ep na miejsce Ek ( należy notować liczbę
przestawień)
1.3. Metoda Gaussa z pełnym wyborem elementu wiodącego.
api = maxaij
i,j = k....m
1.4. Metoda Gaussa z częściowym wyborem elementu wiodącego i skalowaniem.
Definicja współczynnika si dla każdego wiersza si = maxaij
j = 1...m
dla otrzymania zer w pierwszej kolumnie ustalamy numer k równania z warunku
i dokonujemy zamiany E1 na Ek
j = 1...n
1.2. Metoda Dolittle'a lii = 1
Crouta uii = 1
Choleskiego uii = lii
Ax =b
A = LU L - mac. dolnotrójkątna U - mac. górnotrójkątna
LUx =b
Lc =b otrzymujemy c
Ux =c otrzymujemy x
wyznaczenie L i U
dane
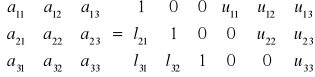
po wymnożeniu macierzy L i U
u11 = a11
u12 = a12
u13 = a13 itd...
Dla macierzy symetrycznej i dodatnio określonej rozklad trójkątny upraszcza się do postaci
A = LLT
W metodzie Choleskiego dla uniknięcia pierwiastkowania korzystniejszy jest rozkład
A = LDLT L - macierz trójkątna z jedynkami na przekątnej
D - macierz diagonalna
Ax =b
LDLTx =b
DLTx = c
Lc =b otrzymujemyc
Dd =c otrzymujemyd
LTx =d otrzymujemyx
1.6. Metoda Gaussa - Jordana.
Ax =b
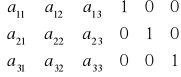
A-1Ax =b
x = A-1b
wyznaczenie macierzy A-1 -postępowanie podobnie jak w metodzie Gaussa.
2.1. Układy równań podokreślone.
A-macierz o wymiarze m*n gdzie m < n
metoda Gaussa - Jordana
Ix1 -Ax2 =b
2.2. Układy nadokreślone.
3. Metody iteracyjne - polegają na przyjeciu wektora startowego x0 oraz generowanie ciągu wektorów xk zbieżnych do rozwiązania x.
3.1. Metoda Jacobiego.
Ax =b
A = D - L - U
x<k> = T(x )<k-1>+c
(D-L-U)x =b
D(x)<k> = (L-U) (x)<k-1>+b
Zakończenie iteracji gdy norma względna
dąży do zera.
3.2. Metoda Gaussa - Seidela
(D-L-U)x =b
(x)<k> = (D-L)-1U (x)<k-1>+(D-L)-1b
Warunkiem wystarczającym by proces był zbieżny dla dowolnego x0 jest aby mac. A miała silnie dominującą przekątną główną.
3.3. Metoda relaksacyjna
Def. Wektor reziduum r =b - Ax
![]()
ω - wsp. relaksacji gdy 0< ω<1 - podrelaksacja
ω>1 - nadrelaksacja
IV. 14. Metody aproksymacji funkcji jednej zmiennej.
Aproksymację stosujemy gdy :
złożoną funkcję chcemy przedstawić w prostej postaci.
funkcja dana jest w postaci tablicy
funkcja jest nieznana ( poszukiwanie równań różniczkowych )
Ogólnie - przedstawiamy funkcję w postaci kombinacji liniowej pewnych danych funkcji bazowych.
φ(x) = a0u0(x) + a1u1(x) + ... + anun(x) ≈ f(x)
B_(x) = [ u0(x), u1(x), ..., un(x) ] - macierz funkcji bazowych ( liniowo niezależne)
aT = [ a0, a1, ... , an ] - wektor nieznanych współczynników
φ(x) = B_(x)a
1.Aproksymacja punktowa.
- Funkcja f(x) dana jest w postaci tablicy x_= [x0, x1, ... , xn ] i odpowiadających wartości F = [f0, f1, ... , fn ].
-Należy dobrać współczynniki ai i=0,1...n tak aby
![]()
możliwie najlepiej przybliżał F(x) , ( baza B_(x) ułożona z jednomianów )
-Należy rostrzygnąć stopień wielomianu i kryterium jakości aproksymacji, najczęściej stosuje się kryterium najmniejszych kwadratów.
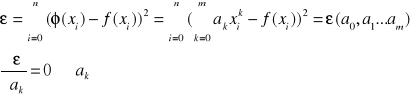
Dla przypadku wielomianu uogólnionego:
φ(x) = a0u0(x) + a1u1(x) + ... + amum(x) powstaje układ równań o postaci :
![]()
![]()
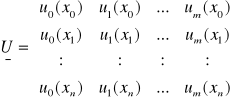
w zapisie macierzowym:
UTUa = UTF
gdzie:
Równania znacznie się upraszczają gdy funkcje uk(x) są ortogonalne
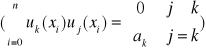
wtedy UTU przyjmie postać:
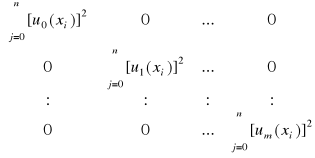
np.: funkcje Czebyszewa,
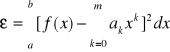
2. Aproksymacja calkowa.
Funkcja f(x) jest określona i ciągla w przedziale [a,b]
![]()
metoda najmniejszych kwadratów
![]()
![]()
np.: dla m = 2
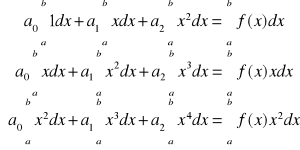
![]()
3. Aproksymacja funkcjami ortogonalnymi.
Def. Funkcja wagowa - taka funkcja w(x) , że w(x) ≥ 0 , w [a,b] , lub w(x)≠0 w pewnym przedziale [a,b], np.:
![]()
w∈[-1,1]
![]()
- błąd średni kwadratowy z wagą w .
1) 0 j≠k
2) αj > 0 j=k - funkcja ortogonalna z wagą
3) αj = 1 j=k - funkcja ortogonalna
Wielomiany Legendra w(x)1 w [-1,1] - ortogonalne
Funkcja Czebyszewa
![]()
w [-1,1] - ortogonalne
Jeśli f(x) jest aproksymowalne w [a,b] to dokonujemy przekształcenia na przedział [-1,1] według wz:
![]()
t ∈ [-1,1]
![]()
IV. 15. Metody numeryczne rozwiązywania równań nieliniowych.
1)Dobór algorytmu gwarantującego zbieżność iteracji.
2)Dobór punktu startowego.
1. Metoda bisekcji polega na systematycznym okrojeniu przedziału w którym istnieje pierwiastek.
f(x) ∈ (a,b) f(a)f(b) < 0
![]()
gdy : f(a1)f(ρ1) > 0 to a2 = ρ1 b2 = b1
f(a1)f(ρ1) < 0 to a2 = a1 b2 =ρ1
warunek zakończenia iteracji ρn - ρn-1 < ε1 i f( ρn ) < ε2
2. Metoda punktu stałego.
Def. Punktem stałym przekształcenia g nazywamy pierwiastek x = ρ , g(x) = x , f(x) = 0
Przykład :
ex = x+2 ex-2=x g(x)=ex-2
ρn+1 = g(ρn)
ρn+1 = eρn - 2
3. Metoda stycznych Newtona - Raphsona.
zał: f(x) ∈ C2 w (a,b) x ∈ [a,b] i jest przybliżeniem pierwiastka takim że,
f `(x ) ≠0 , x -p - małe
f(x)=f(x +( x-x ))=f(x )+f `(x )(x-x)+ ...
gdy : x=p to f(p)≡0 ≈ f(x )+f `(x )(p-x )

Wzór iteracyjny
![]()
n=1,2...
4. Metoda siecznych.
![]()
wzór iteracyjny:
![]()
wadą jest to, że muszą być dwa punkty startowe.
5. Metoda Reguła-Falsi
- zmodyfikowana metoda siecznych tak aby w procesie iteracji pierwiastek był zawsze zawarty w przedziale [ai ,bi] , f(ai )f(bi ) < 0
![]()
lub:
an=an-1 ; bn = pn gdy f(an-1)f(pn) < 0
an=pn ; bn = bn-1 gdy f(an-1)f(pn) > 0
![]()
![]()
1 0_
1
1
1
0_ 1
![]()
G_
![]()
1 0_
1
1
0_ 1
Wyszukiwarka
Podobne podstrony:
4 Metody numeryczne rozwiązywania układów równań2
4 Metody numeryczne rozwiązywania układów równań
MN energetyka zadania od wykładowcy 09-05-14, STARE, Metody Numeryczne, Część wykładowa Sem IV
MN energetyka zadania od wykładowcy 09-05-14, STARE, Metody Numeryczne, Część wykładowa Sem IV
Kalend.-Ćwiczeń-z-Now.-Met.-Anal.-Żywn.-13-14, Nowoczesne metody analizy żywności
wspolczesna zagadnienia, MOJE 13,14,15,16, Halina Poświatowska
wug 2,3,4,5,11,12,13,14,15
3 Metody numeryczne rozwiązywania równań algebraicznych
midnight sun 13 14 15
Lab 13 14 15 16 Multimedia Klasa 4 2011 2012 Lista4, Informatyka, Technikum, Grafika
klima pytania, 13 14 15 16 17 18, Pytanie nr
Metody numeryczne rozwiązywania równań Maxwella w kwazijednowymiarowych strukturach fotnicznych
13 14 15
Przepowiednia 13, 14 i 15 nowy porządek świata, zmiany po III wojnie światowej
13 14 15 16
więcej podobnych podstron