®®®ZASTRZEŻONE:
kolor zielony - pytania opracowane z odpowiedzi ubiegłorocznych, jeszcze nie sprawdzone
kolor czerwony - pytanie nieopracowane, być może zła odpowiedź
kolor granatowy - odpowiedzi innej osoby w tym samym pytaniu
kolor filoletowy - j.w.
kolor brązowy - j.w.
kolor różowy - Geodezja Górnicza, odpowiedzi udzielone przez dr Jaśkowca <3 8=====D <mniam>
TELEDETEKCJA I FOTOGRAMETRIA
1. W którym miejscu pionowego zdjęcia lotniczego rzut środkowy obiektu odpowiada
rzutowi ortogonalnemu?
a) w każdym miejscu,
b) dotyczy to punktów znajdujących się na średniej wysokości,
c) w punkcie głównym zdjęcia,
d) na brzegach zdjęcia.
2. Która z podanych cech nie dotyczy NMT w postaci GRID?
a) jest dogodny do przechowywania danych i zarządzania nimi,
b) posiada dużą liczbę łatwo konwertowalnych formatów zapisu
c) umożliwia generowanie produktów pochodnych takich, jak spadki, ekspozycje,
krzywizny,
d) dobrze modeluje tereny urozmaicone, w tym zawierające nieciągłości.
3. Wymień elementy orientacji zewnętrznej zdjęcia fotogrametrycznego:
a) współrzędne X,Y środka rzutów w terenowym układzie współrzędnych, azymut osi
kamery, nachylenie osi kamery oraz skręcenie zdjęcia ,
b) ck oraz współrzędne punktu głównego w układzie znaczków tłowych,
c) współrzędne X,Y,Z środka rzutów w układzie terenowym, oraz trzy kąty określające
azymut osi kamery nachylenie i skręcenie zdjęcia ,
d) współrzędne X,Y,Z środka rzutów w terenowym układzie współrzędnych oraz
azymut osi kamery.
aswz2q
φ- azymut osi kamery
κ- skręcenie zdjęcia
ω- nachylenie zdjęcia
4. Zdjęcia ekwiwalentne to zdjęcia:
a) tych samych elementach orientacji wewnętrznej i dowolnych elementach orientacji
zewnętrznej,
b) tych samych elementach orientacji wewnętrznej, o osiach kamer równoległych,
c) tych samych elementach orientacji zewnętrznej, różnych elementach orientacji
wewnętrznej,
d) tych samych elementach orientacji wewnętrznej oraz współrzędnych środków
rzutów, różnych elementach orientacji kątowej.
1
®®
Zdjęcie ekwiwalentne – zdjęcie zastępcze przetworzone analitycznie lub rastrowo.
Hipotetyczne zdjęcie, które byłoby wykonane z tego samego środka rzutów, ale przy
innych elementach orientacji zewnętrznej. Zdjęcie ekwiwalentne można przeliczyć
na zdjęcie o innym ck. Wykorzystywane w uproszczonej metodzie opracowania
stereogramu.
5. Co to są elementy orientacji wewnętrznej zdjęcia?
a) współrzędne obrazowego punktu głównego obiektywu w odniesieniu do płaszczyzny
zdjęcia,
b) współrzędne znaczków tłowych z kalibracji kamery ,
c) Położenie punktu głównego zdjęcia w układzie znaczków tłowych i wymiar ramki
tłowej,
d) współrzędne przedmiotowego punktu głównego obiektywu w układzie tłowym
zdjęcia.-
Parametry rzutu środkowego w kamerze fotogrametrycznej, zwane elementami
orientacji wewnętrznej kamery: x0,y0,ck (stała kamery). Są podane w odniesieniu do
układu zmaterializowanego na zdjęciu fotogrametrycznym przez tzw. znaczki tłowe.
6. Elementy orientacji zewnętrznej zdjęcia umożliwiają:
a) rekonstrukcję wiązki promieni rzutujących w kamerze,
b) wykonanie orientacji na znaczki tłowe,
c) odtworzenie położenia wiązki promieni rzutujących w układzie terenowym,
d) obliczenie trzech kątów (omega, fi, kappa) określających orientację wiązki.
7. Elementy orientacji wewnętrznej zdjęcia mają na celu:
a) wykonanie orientacji wewnętrznej na autografie,
b) odtworzenie wiązki promieni rzutujących w kamerze,
c) odtworzenie wiązki promieni rzutujących w terenowym układzie odniesienia,
d) wykonanie orientacji wzajemnej na autografie.
8. Stała kamery to odległość od:
a) środka rzutów do punktu przecięcia się łącznic znaczków tlowych,
b) środka rzutów do punktu głównego zdjęcia,
c) punktu głównego zdjęcia do punktu przecięcia się łącznic znaczków,
d) średnia odległość między znaczkami tłowymi kamery.
9. Zdjęcia do obserwacji stereoskopowej powinny spełniać następujące warunki:
a) osie w przybliżeniu prostopadłe do siebie i nierównoległe do bazy fotografowania,
b) osie o dowolnej orientacji, zdjęcia wykonane z dwóch różnych stanowisk,
c) zdjęcia wykonane z tego samego stanowiska lecz o różnej orientacji kątowej,
d) osie w przybliżeniu do siebie równoległe i prostopadłe do bazy fotografowania.
10. Na pionowym zdjęciu płaskiego terenu w skali 1:5000 wykonanym kamera o
ck=300mm znajdują się dwa budynki:
Pierwszy o wysokości 10m, drugi o wysokości 20m .Ich krawędzie widoczne na zdjęciu
są tej samej długości. Budynek drugi znajduje się w odległości od punktu głównego:
1) cztery razy mniejszej od pierwszego,
2
®®
2) dwa razy większej od pierwszego,
3) cztery razy większej od pierwszego,
4) dwa razy mniejszej od pierwszego.
JAKI WZÓR ???????
Moglby ktos napisac jak to policzyc?
- Chodzi tu o dystorsję radialną - obiekty położone w
tej samej odległości od środka rzutów (środka zdjęcia) mają takie same zniekształcenia (przesunięcia)
radialne. Inaczej mówiąc, im dalej od środka, tym większa wartość tego zniekształcenia, które zwiększa
się liniowo od środka. Rozwiązanie samo rzuca się w oczy, bo proste dane podali.
Średnio się rzuca. Z wszystkich danych się korzysta w obliczeniach?
dr=(dh*r)/W
yhy (Jacek fuk) i wszstko jasne
11. W układzie fotogrametrycznym:
Początek układu w lewym środku rzutów (punkt główny przedmiotowy obiektywu). Oś YF
pozioma zgodna z kierunkiem osi lewej kamery, oś XF pozioma i prostopadła do YF. Oś ZF
pionowa.
12. Funkcja DLT określa zależność pomiędzy:
a) współrzędnymi punktów na zdjęciu a ich współrzędnymi w przestrzennym układzie
terenowym,
b) współrzędnymi punktów na zdjęciu a ich współrzędnymi w przestrzennym układzie
tłowym,
c) współrzędnymi przestrzennymi punktów na zdjęciu, a ich współrzędnymi płaskimi w
przestrzeni przedmiotowej,
d) współrzędnymi punktów na zdjęciu a ich współrzędnymi w płaszczyźnie obiektu.
13. Odpowiadające sobie (homologiczne) punkty na dwu zdjęciach stereogramu
charakteryzuje:
a) położenie na odpowiadających sobie liniach rdzennych (epipolarnych),
b) ta sama współrzędna tłowa y(z),
c) ten sam promień radialny,
d) stała paralaksa podłużna.
14. Dla wykonania przetwarzania rzutowego płaszczyzny zdjęcia na płaszczyznę mapy
potrzebna jest
a) dwóch odpowiadających sobie punktów położonych jak najdalej od siebie,
b) trzech odpowiadających sobie punktów nie leżących na jednej prostej,
c) czterech odpowiadających sobie punktów, z których żadne trzy nie należą do jednej
prostej,
d) pięciu dowolnie rozmieszczonych punktów homologicznych.
(jest 8 niewiadomych: od A do H - stąd potrzebne 4 punkty (X,Y))
15. Dla gridowej reprezentacji danych przestrzennych można stosować następujące
operatory odległości:
generowanie map odległości, buforowanie, generowanie map kosztów, analizy sieciowe
3
®®
16. Przez kalibrację kamery rozumiemy:
a) rektyfikację libell oraz justowanie innych systemów optyczno-mechanicznych
kamery,
b) określenie elementów orientacji wewnętrznej kamery,
c) kontrolę działania wszystkich systemów kamery,
d) wymianę stożka kamery lotniczej.
17. Poprawki ze względu na błąd dystorsji obiektywu wprowadza się na kierunku:
a) z punktu izocentrycznego,
b) z punktu nadirowego,
c) z punktu głównego,
d) z punktu przyśrodkowego.
18. Parę zdjęć naziemnych o osiach równoległych, poziomych i prostopadłych do bazy
nazywamy stereogramem:
a) zwróconym,
b) normalnym,
c) zbieżnym,
d) równoległym.
19. Punktem głównym zdjęcia nazywamy:
a) przecięcie łącznic znaczków tłowych,
b) rzut ortogonalny środka rzutów na płaszczyznę tłową,
c) punkt powstały z przebicia zdjęcia prosta pionową przechodzącą przez środek
rzutów,
d) punkt, przez który przechodzą wszystkie promienie wiązki rzutującej.
20. Największe „martwe pola” występują na zdjęciach lotniczych wykonanych kamerą
ze stożkiem:
a) szerokokątnym, t
b) nadszerokokątnym,
c) normalnokątnym,
d) nie ma znaczenia.
21. System FMC w kamerze lotniczej ma za zadanie:
a) pionowanie osi kamery,
b) tłumienie drgań kamery,
c) kompensacje rozmazania spowodowanego ruchem samolotu,
d) kompensację nieostrości spowodowanej winietowaniem.
22. Który z niżej wymienionych warunków nie dotyczy wszystkich kamer
fotogrametrycznych?
a) rejestracja obrazu na powierzchni zbliżonej do płaszczyzny,
b) zminimalizowana dystorsja obiektywu,
c) znane i stabilne elementy orientacji wewnętrznej,
d) kompensację rozmazania FMC.
4
®®
23. Która z wymienionych niżej cech kamer fotogrametrycznych lotniczych i
naziemnych dotyczy jednocześnie obu typów kamer?
a) możliwość realizacji założonych kątowych elementów orientacji zewnętrznej zdjęć,
b) znajomość elementów orientacji wewnętrznej wykonywanych zdjęć,
c) niezmienna odległość obrazowa (stała kamery) ,
d) materiał fotograficzny na płytach szklanych.
24. Od czego zależy wybór kąta rozwarcia stożka przy projekcie lotu
fotogrametrycznego?
a) od skali opracowywanej mapy,
b) od rodzaju pokrycia terenu i jego deniwelacji,
c) od skali zdjęć,
d) od wielkości terenu objętego projektem lotu.
25. Zdjęcia lotnicze wykonane będą równocześnie z tego samego samolotu kamerami:
szerokokątną (Ck=150 mm) i normalnokątną (Ck=300 mm). Którą kamerą zarejestrowana
zostanie większa powierzchnia terenu i ile razy większa?:
a) kamerą szerokokątną zostanie zarejestrowany obszar 4 razy większy,
b) kamerą szerokokątną zarejestrowany zostanie obszar 2 razy większy,
c) obiema kamerami zarejestrowany zostanie obszar o tej samej powierzchni,
d) kamerą normalnokątną zarejestrowany zostanie obszar 2 razy większy niż kamerą
szerokokątną.
czemu tak???? (obrazowy przyklad - dwukrotna zmiana długości boku kwadratu
powoduje czterokrotną zmianę pola powierzchni kwadratu)
p1/p2 = 150^2/300^2 => p1 = 4p2
26. Jaka jest zależność między przewidywanym błędem sytuacyjnym a przewidywanym
błędem wysokości wyznaczenia położenia punktu ze stereogramu zdjęć lotniczych?
a) błąd wysokości jest dwa razy większy od błędu sytuacyjnego,
b) aby otrzymać błąd wysokości, należy błąd sytuacyjny pomnożyć przez stosunek
bazowy w/B=Ck/b,
c) błąd wysokości jest dwa razy mniejszy od błędu sytuacyjnego,
d) błąd wysokości jest w/Ck razy większy od błędu sytuacyjnego.
27. Kompozycję w barwach zbliżonych do naturalnych można uzyskać łącząc metodą
RGB następujące kanały spektralne:
a) niebieski jako R, zielony jako G, czerwony jako B
b) podczerwony jako R, zielony jako G, niebieski jako B
c) czerwony jako R, zielony jako B, niebieski jako G
d) czerwony jako R, zielony jako
G, niebieski jako B << potwierdzone info
28. Zdjęcia niemetryczne to zdjęcia wykonane:
a) cyfrową kamerą fotogrametryczną,
b) fotograficznym aparatem analogowym ze znajomością dystorsji obiektywu,
c) aparatem cyfrowym ze znajomością dystorsji obiektywu i stałej kamery,
5
®®
d) dowolnym aparatem fotograficznym.
29. Skutkiem błędu dystorsji jest:
·
zniekształcenie obrazu (dystorsja może być beczkowa i poduszkowa)
30. Co to jest stosunek bazowy?
a) iloraz bazy podłużnej i odstępu między osiami szeregów,
b) iloraz wysokości bezwzględnej lotu i odstępu między dwoma sąsiednimi środkami
rzutów w szeregu,
W to nie jest wysokość bezwzględna, W to wysokość lotu ponad
poziom terenu (czyli względna)
c) iloraz odstępu między dwoma sąsiednimi środkami rzutów w terenie a ogniskową
obiektywu kamery,
d) iloraz ogniskowej obiektywu kamery i odległości między środkami rzutów dwu
sąsiednich zdjęć w szeregu na zdjęciach.
czyli ck/b (potwierdzone przez dr Tokarczyk)
31. Jaką wielkość ma baza podłużna stereogramu zdjęć lotniczych dla p= 60%, formatu
23*23cm i skali zdjęć 1:5000?
a) 460 m,
b) 690 m,
c) 92 mm,
d) 138 mm.
mozna wzor? L*(100-p/100) L=0.23*mz
32. Jaka będzie odległość między osiami szeregów przy pokryciu poprzecznym między
szeregami q = 30%, formacie zdjęć 23*23 cm i skali 1:10 000?
a) 690 m,
b) 161 mm,
c) 1610 m,
d) 6900 m.
mozna wzor? *(100-q/100) L=0.23*mz
33. Rejony Grubera to:
a) rejony na zdjęciu, gdzie występują najmniejsze zniekształcenia radialne,
b) rejony zdjęć, gdzie należy wybierać punkty homologiczne do orientacji wzajemnej,
c) rejony na stereogramie, gdzie należy wybierać fotopunkty do orientacji
bezwzględnej,
d) rejony w terenie, gdzie należy sygnalizować fotopunkty do aerotriangulacji.
34. Orientacja wzajemna pary zdjęć polega na:
a) doprowadzeniu do równoległości łącznic znaczków tłowych obu zdjęć,
b) usunięciu paralaksy podłużnej na modelu (doprowadzeniu do przecięcia promieni
jednoimiennych obu zdjęć),
c) usunięciu paralaksy poprzecznej na modelu (doprowadzenie do przecięcia promieni
jednoimiennych obu zdjęć),
d) doprowadzeniu zdjęć, względem terenowego układu odniesienia, do położenia, jak
w momencie fotografowania.
35. Orientacja bezwzględna modelu na autografie cyfrowym polega na:
a) obliczeniu współczynników transformacji przestrzennej pomiędzy lokalnym układem
modelu, a układem terenowym,
6
®®
b) obliczeniu współrzędnych lewego środka rzutów, współczynnika skali oraz trzech
kątów orientacji każdego zdjęcia,
c) obliczeniu elementów orientacji zewnętrznej i wewnętrznej obu zdjęć,
d) zeskalowaniu modelu i spoziomowaniu zdjęć.
36. Aby wykonać orientację bezwzględną modelu na autografie cyfrowym należy znać:
a) długość odcinka na modelu i odpowiadającą mu długość w terenie,
b) współrzędne. środków rzutów lewego i prawego zdjęcia,
c) współrzędne XYZ co najmniej trzech fotopunktów,
d) wysokości co najmniej trzech fotopunktów.
37. W celu obliczenia parametrów orientacji wzajemnej pary zdjęć (bez wyrównania)
należy pomierzyć na stereogramie:
a) co najmniej 6 fotopunktów w rejonach Grubera,
b) co najmniej 5 dowolnych punktów w rejonach Grubera,
c) co najmniej 12 dowolnych punktów na stereogramie,
d) co najmniej 5 fotopunktów rozmieszczonych w rejonach Grubera.
38. Co to jest ortoobraz?
co to jest ortofotogram (poprzedni rok)
a) pionowe zdjęcie terenu,
b) przetworzone zdjęcie w taki sposób, ze wszystkie jego punkty są w jednolitej skali,
c) przetworzone zdjęcie w taki sposób, ze zachowuje jednolita skale dla punktów
znajdujących się na powierzchni terenu,
d) zdjęcie o dowolnej orientacji zamienione na ściśle pionowe.
Ortoobraz (= ortofotografia) to wynik ortorektyfikacji przeprowadzonej dla pojedynczego
zdjęcia.
ortofotografia = ortoobraz, ortofotogram, ortozdjęcie
39. Jakie dane pozwalają na utworzenie ortofotomapy?
to pytanie jest ok
ortofotografii (poprzedni rok)
a) współrzędne środka rzutów zdjęcia i jego skala,
b) elementy orientacji wzajemnej stereogramu i orientacja bezwzględna jednego ze
zdjęć,
c) utworzenie modelu stereoskopowego,
d) elementy orientacji zdjęcia, zdjęcie i NMT.
Ortofotomapy:elementy orientacji wewnętrznej, zewnętrznej, zdjęcie i NMT.
40. Wśród 34 tematów danych przestrzennych INSPIRE znajdują się:
a) adresy, ortofotomapa, użytkowanie terenu
b) mapa ewidencji gruntów i budynków, mapa zasadnicza, mapa sytuacyjno-
wysokościowa
c) baza danych topograficznych (TBD), mapa topograficzna
d) mapa zagrożenia i ryzyka powodziowego
7
®®

41. Celem nowoczesnej aerotriangulacji jest:
a) zagęszczenie osnowy fotogrametrycznej dla orientacji wzajemnej modeli,
b) opracowanie mapy,
c) dostarczenie danych dla utworzenia ortofotomapy i zagęszczenie osnowy
fotogrametrycznej do orientacji modeli,
d) otrzymanie numerycznego modelu terenu.
42. Histogram obrazu cyfrowego wyraża:
a) przyporządkowanie jasności pikseli ich odpowiedziom spektralnym,
b) zależność gęstości optycznej od naświetlenia,
c) przyporządkowanie ilości pikseli ich jasności,
d) zależność jasności pikseli od ich położenia.
43. Streching czyli rozciągnięcie histogramu powoduje:
a) zwiększenie kontrastu obrazu,
b) przyciemnienie obrazu,
c) inwersję barw,
d) rozjaśnienie obrazu.
44. Które z poniższych systemów rejestracji promieniowania zalicza się do grupy
systemów aktywnych?
a) Ikonos,
b) Spot,
c) Landsat,
d) Radarsat.
45. Obliczając iloraz kanału podczerwonego i czerwonego otrzymujemy wskaźnik
pozwalający wyznaczyć:
a) zanieczyszczenie atmosfery,
b) zawartość chlorofilu,
c) ilość biomasy,
d) temperaturę.
46. Wzorce statystyczne klas zawierają dane takie jak:
a) minimum i maksimum jasności pikseli oraz ich liczbę w danej klasie,
b) prawdopodobieństwo przyporządkowania piksela danej klasie,
c) odległości piksela od środka klas,
d) całkowitą liczbę pikseli w danej klasie, średnią jasność pikseli i odchylenie
standardowe.
47. Pole treningowe w klasyfikacji nadzorowanej to:
a) zbiór pikseli na obrazie wielospektralnym reprezentatywnych dla danej klasy
użytkowania terenu,
b) zbiór pikseli o podobnej jasności na obrazie wielospektralnym,
c) zbiór pikseli o tej samej odpowiedzi spektralnej na obrazie wielospektralnym ,
d) wybrany na kompozycji barwnej obszar o wyraźnych granicach.
8
®®
48. Krzywa spektralna przedstawia:
a) jak zmienia się odbicie promieniowania elektromagnetycznego w zależności od
długości padającej fali,
b) jak zmienia się długość fali w zależności od współczynnika odbicia promieniowania
elektromagnetycznego,
c) jak zmienia się odbicie promieniowania elektromagnetycznego w zależności od
temperatury,
d) zależność odbicia promieniowania elektromagnetycznego przez określone obiekty w
różnych porach dnia.
49. Obraz wielospektralny w teledetekcji to:
a) każdy obraz barwny,
b) obraz który składa się z kilku kanałów spektralnych zarejestrowanych w tym samym
czasie,
c) obraz który składa się z kilku kanałów spektralnych zarejestrowanych w różnym
czasie,
d) obraz który składa się z czterech obrazów, wykonanych zimą, wiosnę, latem i
jesienią.
50. W usłudze Web Map Server dane przestrzenne są udostępniane w postaci:
a) rastrowej w formacie JPG, PNG, GIF,
b) rastrowej w formacie BMP,
c) wektorowej w formacie SHP,
d) wektorowej w formacie DXF.
9
®®

GEODEZJA GÓRNICZA
1. Nawiązanie podziemnej poziomej osnowy metodą wtyczeniową wymaga
zastosowania: teodolitu wraz z podstawką orientacyjną
to wtyczanie się w linię 2 pionów i pomiar metodą repetycyjną w 2 repetycjach
2. Giroteodolitem wyznacza się kierunek:
¯Giroskopowy (Geograficzny).
A ja bym powiedzial ze azymut geograficzny-
astronomiczny (lub po prostu astronomiczny)- tak mam w notatkach z pierwszego
roku z wykladow Belucha. Dopiero po zredukowaniu azymutu astronomicznego
na powierzchnie odniesienia uzyskuje się azymut geograficzny geodezyjny
północ
geograficzną wyznaczoną przez południk miejscowy.
3. Jeśli do azymutu wyznaczonego giroteodolitem doda się poprawkę na zbieżność
południków to obliczony zostanie:
Azymut Topograficzny (kartograficzny)
APP1-PP2T=AGpp1-pp2+ ΔT
ΔT=AABT-AABG – poprawka na zbieżność południków
4. Nawiązanie osnowy poziomej metodą wliczeniową może być wykonane, jeśli
wyrobiska podziemne łączą ze sobą minimum:
2 szyby pionowe
jest to ciąg poligonowy wliczeniowy. Pozwala na kontrolę obliczeń, czego nie da się
przeprowadzić w metodzie wtyczeniowej. Metoda wliczeniowa i giroskopowa jest
dopuszczona przepisami dla nawiązywania osnowy podziemnej.
5. Poprawka na konwergencję do długości mierzonych w podziemnych wyrobiskach
górniczych ma znak dodatni jeśli:
dany punkt znajduje się we wschodniej części strefy ???
“W części wschodniej strefy zbieżność γ ma znak plus, a w zachodniej znak
minus.” - z “KWARTALNIK NAUKOWY PAŃSTWOWEJ WYŻSZEJ
SZKOŁY ZAWODOWEJ W JAROSŁAWIU“
6. Przy przeniesieniu wysokości z zastosowaniem taśmy szybowej wprowadza się
następujące poprawki:
- poprawka komparacyjna
- poprawka termiczna
- poprawka ze względu na ciężar własny taśmy
- poprawka na różnicę sił naciągu taśmy
poprawkę termiczną liczy się inaczej w szybie wdechowym ze względu na nieliniowy
®rozkład temperatur (ociepla się w dół). Poprawkę liczy się więc jako sumę poprawek
na odcinkach ograniczonych pomiarem termicznym.
10
®®
A czy nie liczy się jeszcze poprawki ze względu na poziom odniesienia???
Chyba nie
bardzo XD Przecież taśma wisi pionowo.
hahahahaha
7. Poprawka na temperaturę do pomiarów długości taśmą zależy tylko od:
temperatury taśmy w czasie pomiaru oraz w czasie komparacji oraz współczynnika
rozszerzalności materiału, z którego wykonana była taśma
i od długości samej taśmy
8. Jak zmieni się poprawka na zwis taśmy, jeśli zastosuje się w pomiarach długości dwie
podpórki:
zmniejszy się dziewięciokrotnie względem wartości poprawki bez podpórek (dwie
podporki to trzy przęsła)
pz=g*L/(n^2*p^2)
g-ciężar taśmy, L-długość, p-siła naciągu, n-ilość przęseł
SKAD TA WARTOSC 9X? bo we wzorze n^2 mamy 3 przesła 3^2=9 tak mysle ze ktos to
rozumował co napisał
a wlasnie.... bo wczesniej nie bylo kwadratwow ^2 tylko x2
9. Błąd celowania w wyrobiskach górniczych dla powiększenia lunety 25x wynosi około:
,
(gorsze oświetlenie niż na powierzchni)
dla powierzchni k= 60”=180cc
10. Jeśli powiększenie lunety rośnie to błąd celowania:
maleje
11. Wpływ błędu centrowania teodolitu na błąd pomiarów kątowych jest istotny jeśli:
błąd centrowania:
-przy dużych wartościach kątów (największy 200g)
-gdy są krótkie długości boków
12. Błąd poziomowania teodolitu (m_beta_p) ma wpływ na błąd pomiaru kąta:
gdy są znaczne pochylenia osi celowych teodolitu
w-przewaga libelli, Zw, Zp –kąty nachylenia celowych wstecz i w przód
ODP. Błąd kąta jest proporcjonalny do dokładności libelli <- to jest podyktowane przez dr
Jaśkowskiego to o czym dyskutujecie??
11
®®
13. Jaka jest wartość różnicy wysokości między punktami A i B, jeśli na punkcie A
(wstecz)odczyt z niwelatora na łacie wiszącej wynosi 0450, a na punkcie B odczyt z łaty
stojącej wynosi 1510:
ΔHAB= - 1,960 m
Uzasadnienie: klasyczny wzór to wstecz - w przód ale w tym wypadku dla łaty wiszącej
przyjmiemy ( - wstecz) czyli: ΔHAB = (-450) - 1510 = -1,960
14. Błąd pomiaru długości celowej w niwelacji trygonometrycznej ma istotny wpływ na
dokładność wyznaczenia różnicy wysokości:
dla stromych celowych (wynika ze wzoru poniżej)
l-długość celowej, mts- błąd pomiaru wysokości instrumentu, mi- błąd pomiaru
wysokości celu
-przy długich celowych
-przy dużych nachyleniach
Według mnie nieprawdą jest stwierdzenie “przy długich celowych”, zauważmy, że w
miarę zwiększania się długości celowej zwiększa się wpływ błędu wyznaczenia kąta
(drugi człon pod pierwiastkiem) część dotycząca błędu pomiaru długości zostaje bez
zmian, ponieważ jej wpływ zależy jedynie od cosinusa kąta. Czyli max wpływ jest dla Z=
0 stopni, (celowa pionowa) wtedy cos Z= 1
15. Przepływ powietrza w wyrobisku górniczym zwiększa błędy centrowania teodolitu i
sygnałów przy stosowaniu:
pionów sznurkowych
(mechanicznych)
16. Czy w metodzie kątów kierunkowych należy stosować teodolity:
TAK – teodolity dwuosiowe (nie wiem za bardzo jakie mogą tu być odpowiedzi),
z możliwością rozprzęgnięcia koła poziomego (parafraza)
wiszące (wydaje mi się ze też może być)
Z notatek z wykładu: Zastosowanie tej metody wymaga teodolitu dwuosiowego
podobnie jak w m. repetycyjnej. Odczyty wykonywane na kręgu poziomym są wart.
kątów kierunkowych. Co do wiszących - jest możliwość ich użycia, ale słowo “należy”
chyba sugeruje, że nie o to chodzi.
Jak Jaśkowski usłyszał dwuosiowe to się zdziwił o co chodzi. Omawiając metodę
zasugerował, że to nie jest metoda w której mierzy się kąty, tylko w zasadzie je
odkłada. Czyli teodolity te nie muszą być wysokiej klasy, muszą mieć sprzęg do
przenoszenia kierunku (żeby móc odczyt przenieść).
Aczkolwiek nie powiedział tego dokładnie.
12
®®
17. Kąt pomierzono metodą repetycji górniczej otrzymując następujące wartości
odczytów: cel wstecz (I poł.) 398,2464G , cel w przód (II poł.) 0,9080G. Ile wynosi wartość
kąta wierzchołkowego?:
Troche mało danych
r- ilość repetycji, n - ile razy przekroczony został kąt pełny, Op -
odczyt w przód, Ow- odczyt wstecz
Wydaje mi się, że skoro nie podali ilości repetycji to trzeba przyjąć r=1, wtedy kąt
gdzie :
alfa_przybliżone= OdczytP-OdczytW
Odczyty P i W w I położeniu
- ale tu podany odczyt w przód jest w II położeniu więc i
tak dalej jest problem
wyniesie 1,3308g lub 201,3308g w zależności od n=1 lub n=2.
do obliczania n był taki wzór... ktoś pamięta?
n=
2
r*alfa_przybliżone/400g
no i ciekawe skad wezmiesz ta wartosc przyblizona kata ?
18. Dokumentacja mierniczo-geologiczna jest sporządzana przez:
Dokumentację mierniczo-geologiczną sporządza mierniczy górniczy, a w części w jakiej
przedstawia ona sytuację geologiczną zakładu górniczego – geolog górniczy.”
Dokumentację mierniczo-geologiczną sporządza mierniczy górniczy (geodeta
uprawniony). Zawiera ona dokumenty pomiarowe, obliczeniowe i kartograficzne.
W części, w jakiej przedstawia ona sytuację geologiczną zakładu górniczego – geolog
górniczy.
Mapy podziemne aktualizowane co kwartał. Czynności związane z badaniem
dokumentacji zamknięcia zakładu górniczego może wykonywać jeden z nich.
Całość opisana dokładnie w Rozporządzeniu ministra środowiska z dnia 22 grudnia
2011 w sprawie dokumentacji mirniczo-geologicznej.
19. Szczegółowe przepisy dotyczące dokumentacji mierniczo-geologicznej zawarte są
w:
-Prawo Geologiczne i Górnicze (art. 116) z 9 czerwca 2011 r.
-Rozporządzenie ministra środowiska z Dnia 22 grudnia 2011 r. w sprawie
dokumentacji mierniczo-geologicznej
-Rozporządzenie Ministra Administracji I Cyfryzacji z dnia 14 lutego 2012 r. w sprawie
osnów geodezyjnych, grawimetrycznych i magnetycznych
20. Pozioma osnowa w wyrobiskach górniczych dzieli się na:
-podstawowa, szczegółowa, pomiarowa
21. Celem nawiązania poziomej osnowy w wyrobiskach górniczych jest:
13
®®
wyznaczenie współrzędnych przynajmniej 1 punktu osnowy podziemnej i azymutu co
najmniej jednego boku tej osnowy
22. Celem pomiarów inwentaryzacyjnych szybów górniczych jest:
Zapewnienie prawidłowego i bezpiecznego zjazdu załogi i transportu urobku -
czy ta
odpowiedź jest na pewno poprawna?
http://geoforum.pl/upload/files/site_catalog_text/0_DzU_02_92_819_v.
3.16.1
23. Przepływ powietrza w szybie jest w największym stopniu eliminowany w
pionowaniu:
laserowym
24. Pionowanie laserowe ma ograniczone zastosowanie w szybach:
praktycznie niemozliwe w wydechowych, ograniczone w wdechowych
o dużym zapyleniu i zawilgoceniu
znalazłem też takie coś, że nie prowadzi się pomiarów w takim środowisku, stąd przed
opomiarem wstrzymywane jest wydobycie na tym przodku. Podczas pomiarów z
powodu wstrząsów i zapylenia również nie można prowadzić wydobycia.
Z tego powodu wykonuje się 5 do 10 jednoczesnych obserwacji. Ponowne zatrzymanie
wydobycia w przypadku błędnego pomiaru generuje duże koszty i odszkodowania, a w
przypadku takiej liczby obserwacji łatwo znaleźć błąd gruby.
Szczególnie w szybach wydechowych-chodzi dokładnie o to że jest dużo pary i
zapylenia.
25. W procesie pionowania dwuciężarowego eliminuje się oddziaływanie na cięgno
pionu mechanicznego:
parcie powietrza
ruchów powietrza
cyrkulacji powietrza
przeciągu
26. Orientacja sytuacyjna wyrobisk podziemnych polega na:
Orientacja sytuacyjna ma na celu określenie elementów niezbędnych do nawiązania
poziomej osnowy zakładanej w wyrobiskach do osnowy na powierzchni. Orientacja
sytuacyjna jest więc zespołem czynności mających na celu określenie tych
elementów, a więc azymutu co najmniej jednego dowolnego boku i współrzędnych
co najmniej jednego dowolnego punktu osnowy dołowej w układzie współrzędnych
obowiązujących na powierzchni.
przeniesieniu na poziom wyrobiska współrzędnych oraz azymutu z powierzchni.
14
®®

Celem nawiązania osnowy jest wyznaczenie współrzędnych co najmniej jednego
punktu osnowy podziemnej i azymutu co najmniej jednego boku tej osnowy. Wymaga
pionowania w szybie górniczym (mechanicznego lub laserowego) i przeniesienia
kierunku przez szyb górniczy.
27. Podstawowa metodą zdjęcia szczegółów w wyrobiskach górniczych jest:
metoda rzędnych i odciętych
28. Orientacja wysokościowa wyrobisk podziemnych z zastosowaniem dalmierzy
elektrooptycznych ma ograniczone zastosowanie w szybach:
wydechowych
o dużym zapyleniu i zawilgoceniu
patrz pytanie 24.
29. Jaki rodzaj giroskopu zastosowany jest w giroteodolitach:
Girokompas (żyrokompas)
przede wszystkim o to że musi to być giroteodolit z poziomą osią główną
Wahadło żyroskopowe, żyroskop kierunkowy, kompas żyroskopowy
30. Teodolity i tachimetry elektroniczne stosowane w wyrobiskach górniczych powinny
bezwzględnie mieć:
podświetlany krzyż nitek
-możliwość pomiaru odległości pionowej
wytrzymałość na trudne warunki - pyłoszczelność, wodoszczelność
szczelność obudowy - nie spowodują wybuchu metanu przez iskrę
znaczek centrujący na lunecie (umożliwiający centrowanie pod punktem) - Milewski
31. Czy w pomiarach długości boków taśmą górniczą (50m) w powietrzu należy
stosować do naciągu dynamometr gdy:
mierzymy osnowy wyższych klas
przy ruletce 5kg
przy taśmie 10 kg
na pewno bo ja mam zapisane dla tasmy 5 kg dla ruletki niestety nic
przy 50m trzeba zastosować 2 podpórki.
32. W wyrobiskach górniczych o dużym pochyleniu najdokładniejsza metodą pomiarów
różnic wysokości jest metoda:
wg Milewskiego - trygonometryczna
metoda trygonometryczna ze środka.
ułatwia i przyspiesza pomiar. Do tego wymaga pomiaru w 2 położeniach lunety, więc
podnosi dokładność i umożliwia kontrolę.
15
®®
33. Jaki jest błąd przeniesienia kierunku na dół za pomocą dwóch pionów odległych od
siebie o 3m, jeśli błędy odpionowania obu pionów wynosza ±0,3mm:
0.3mm* 636620/3m = 63.6
cc
(jest na to wzór - w Milewskim)
str 120
21’’ = 63cc
34. Zadawanie „kierunków pionowych” oznacza ukierunkowanie wyrobiska górniczego
w płaszczyźnie:
poziomej - przynajmniej tak Jóźwik na wykładach mówił
prowadzenie wyrobisk zgodnie z projektowanymi azymutami nazywa sie nadawaniem
kierunków pionowych
35. Wielkość tak zwanego „trzymania” przy zadawaniu kierunków to odległość:
odległość osi wyrobiska (wieszanego pionu) od ociosiu
36. Zadawanie „kierunku poziomego” oznacza ukierunkowanie wyrobiska górniczego w
płaszczyźnie:
pionowej
pionowej (nachylenie)
37. Zadany „kierunek pionowy” sygnalizuje się w prowadzonym wyrobisku:
3 pionami sznurkowymi, urządzeniami laserowymi (tarcze kontrolne z otworami)
laserem lub wtyczonymi trzema pionami mechanicznymi (obciążone metalowym
ciężarkiem lub kamieniem)
38. Zadany „kierunek pionowy” sygnalizuje się w prowadzonym wyrobisku trzema
znakami ponieważ umożliwia to:
Wiszące piony wykorzystuje się na odcinku 50m do wizualnego przedłuzania kierunku na
przodek okiem nieuzbrojonym.
3 piony umożliwiają kontrolę czy są w jednej płaszczyźnie.
Jeżeli któryś pion odbiega od linii 3 pionów, należy wezwać geodetę, który skoryguje
błędny pion. W przypadku tylko 2 pionów po przesunięciu się jednego z nich nie można
zauważyć błędu.00
16
®®

39. Nachylenie wyrobiska o długości 100m i różnicy wysokości spągu na jego końcach
równej 0,5m wynosi:
5 promili
0,5%=5‰
ΔH=x%*L => x%= ΔH/L
x%=0,5m/100m*100% metry się skracają i wychodzi x%=0,5% czyli 5 promili dla
sprawdzenia można policzyć spadek dla długości 100m i różnicy wysokości 100m
40. Maksymalna różnicy wysokości w wyrobiska o długości 100m i nachyleniu 7‰
wynosi: 0.7m
wzory wyżej (pyt.39)
41. Działalność miernicza na terenie zakładu górniczego podlega przepisom:
Prawo Geologiczne i Górnicze (art. 116) z 9 czerwca 2011 r.
patrz pytanie 19.
42. Mapa górnicza jest dokumentem kartograficznym wykonanym:
przez dział mierniczo-geologiczny kopalni ukazującym sytuację górniczą na określonym
pokładzie
Mapy górnicze dzielą się na:
1) mapy podstawowe - od 1:500 do 1:2000;
2) mapy przeglądowe - od 1:500 do 1:50 000;
3) mapy specjalne - od 1:50 do 1:25 000;
4) mapy sytuacyjno-wysokościowe powierzchni w granicach terenu górniczego - od
1:500 do 1:10 000;
5) profile otworów wiertniczych oraz przekroje zboczy kopalń odkrywkowych - od 1:50
do 1:2000;
6) przekroje geologiczne - od 1:100 do 1:50 000.
43. Do dokumentacji mierniczo -geologicznej zalicza się:
1) dokumenty pomiarowe
2) dokumenty obliczeniowe
3) dokumenty kartograficzne przedstawiające aktualną sytuację geologiczną oraz górniczą
zakładu górniczego, a także stan powierzchni w granicach terenu górniczego.
Dokadny opis co znajduje się w dokumentacji: § 7 i 8 Rozporządzenia ministra
środowiska…
44. Mapy górnicze dzielą się ze względu na:
przeznaczenie, skale i treść - ogólne i specjalne, tematyczne (uzupełniające)
sposób wydobycia (odkrywkowe, podziemne, otworowe)
45. Mapy górnicze są zorientowane zgodnie z północą:
17
®®
-na podstawie przeniesionego azymutu z powierzchni (patrz pytanie 26)
-na podstawie pomiaru giroteodolitem
-po przeliczeniu współrzędnych z układu lokalnego (przepisy zezwalają na prowadzenie
pomiarów i rysowanie map w układach lokalnych)
46. Jakie dokumenty zawierają znaki umowne stosowane na mapach wyrobisk
górniczych:
-
PN-G-09000-1:2002 Mapy górnicze. Część 1: Podział i terminologia
-
PN-G-09000-3:2002 Mapy górnicze. Część 3: Wymagania podstawowe
-
PN-G-09001:2003 Mapy górnicze. Definicje, wzorce i symbole barw
-
PN-G-09003:2003 Mapy górnicze. Umowne znaki obiektów i urządzeń na powierzchni
-
PN-G-09004:2005 Mapy górnicze. Umowne znaki podziemnych wyrobisk górniczych
-
PN-G-09005:2004 Mapy górnicze. Umowne znaki surowców mineralnych
- PN-ISO 710-2:1999 Umowne znaki do stosowania na mapach wielkoskalowych, planach i przekrojach
geologicznych – Umowne znaki skał osadowych
- PN-ISO 710-3:1999 Umowne znaki do stosowania na mapach wielkoskalowych, planach i przekrojach
geologicznych – Umowne znaki skał magmowych
- PN-ISO 710-4:1999 Umowne znaki do stosowania na mapach wielkoskalowych, planach i przekrojach
geologicznych – Umowne znaki skał metamorficznych
- PN-G-09006:2005 Mapy górnicze. Umowne znaki zagrożeń i urządzeń zabezpieczających w wyrobiskach
podziemnych
- PN-G-09007:2004 Mapy górnicze. Umowne znaki granic
- PN-74/G-9008 Mapy górnicze. Umowne znaki podziemnych urządzeń transportowych, maszyn
przodkowych oraz urządzeń energetycznych
- PN-75/G-09009 Mapy górnicze. Umowne znaki wentylacyjne
47. Metoda pomiaru tzw. kątów kierunkowych (azymutalna) może być stosowana
tylko :
Dla poligonizacji III rzędu (???)
jeżeli kierunek K jest kierunkiem półnvocy
(jeżeli kierunek K jest kierunkiem północy
wtedy kąt kierunkowy równy jest azymutowi)
przy zastosowaniu do pomiaru teodolitu wiszącego, czyli takiego, który mocuje się na
ścianie, a nie na statywie.
Tam gdzie nie jest wymagana duża dokładność.
48. Stabilizacja punktów w wyrobiskach górniczych jest obowiązkowa w osnowie:
podstawowej i szczegółowej
49. Instrument kątomierczy, wykorzystywany w pomiarach w podziemnych wyrobiskach
górniczych musi być zaopatrzony w:
system rozprzęgnięcia koła poziomego
podświetlany krzyż nitek
pytanie 30 jest podobne.
18
®®
Wydaje mi się, że prawidłowy jest kompensator. << to jakis fetysz tych kompensatorow
ktos ma?
Zgodnie z moimi notatkami z ćwiczeń z Jaśkowskim cechy instrumentów:
a) konieczne
- bezpieczeństwo przed wybuchem
- dokładność odpowiadająca wykonywanym pomiarom
- znaczek centrujący w lunecie teodolitu
b) przydatne
- duża jasność lunety (jak największa soczewka)
- krzyż nitek przystosowany do celowania na cele w bliskiej i dalszej odległości
- podświetlany krzyż nitek
- podświetlane urządzenie odczytowe
- kompensator wskaźników odczytowych koła pionowego
- dobry kolimator
- szczelność obudowy
- mały ciężar i wymiary
- różne ukształtowanie śruby zaciskowej i leniwki
- zestaw okularów i pryzmatów łamiących do lunety
- dostosowanie do różnej pozycji pracy (stojąca, wisząca)
50. Co charakteryzuje błąd poprzeczny ciągu typowego:
Przesunięcie się poprzeczne punktu zbicia drążonego chodnika
liczba pomierzonych odcinków, długość ciągu, błąd pomiaru kąta i kierunku
nawiązania.
Błąd poprzeczny charakteryzują błąd azymutu nawiązania i błędy pomiaru
kątów.
GEODEZJA 1
1. Metodę kierunkową pomiaru kątów powinno stosować się:
a) dla każdej liczby celowych,
b) na terenach bagiennych i tam gdzie pomiar może trwać długo,
c) dla trzech lub większej liczby celowych,
d) gdy chcemy zmniejszyć błąd odczytu.
dla 3 lub więciej celów, na stabilnym podłożu równomierne oświetlenie celów
2. Dla poziomej osi celowej wpływ błędu kolimacji na błąd odczytu kierunku jest:
a) zerowy,
b) minimalny,
19
®®
c) zależny od wskazania libeli głównej,
d) związany z błędem inklinacji.
3. Układ współrzędnych „1965”:
a) stanowi jeden układ współrzędnych dla całego kraju,
b) składa się z pasów południkowych w odwzorowaniu Gaussa-Krügera,
c) składa się z pięciu stref odwzorowawczych,
d) jest układem stosowanym w b. zaborze pruskim.
4. Prawidłową postacią godła mapy w skali 1:500 w układzie „2000” w strefie 7 jest:
7.bbb.cc.dd.e.f
a) 6.121.30.05.2.2
b) 7.121.30.05.2.2
c) 7.121.300.522
d) 7.121.30.2
5. Szkic przeglądowy szkiców polowych jest:
a) wykonywany po zakończeniu roboty,
b) zbędny,
c) wykonywany w miarę postępu robót,
d) wykonywany tylko dla pomiarów wysokościowych.
6. Błąd kolimacji w teodolicie:
a) można usunąć przez przesunięcie siatki celowniczej w kierunku poziomym,
b) nie daje się rektyfikować,
c) można usunąć przez przesunięcie siatki celowniczej w kierunku pionowym,
d) można usunąć przez rektyfikację libeli głównej.
7. Dopuszczalna długość rzędnej dla szczegółów I grupy dokładnościowej:
a) nie jest ograniczona,
b) zależy od skali opracowania,
c) wynosi 25 m,
d) wynosi 50 m.
8. Błąd położenia sytuacyjnej osnowy pomiarowej względem najbliższych punktów
poziomej osnowy geodezyjnej zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011 roku
w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych
i wysokościowych oraz opracowania i przekazywania wyników tych pomiarów do
państwowego zasobu geodezyjnego i kartograficznego:
pytanie zmodyfikowane (świeże z
maila roku), ale odpowiedź zaznaczona jest poprawna
a) wynosi 0.20 m
b) wynosi 0.10 m,
c) wynosi 0.05 m,
d) zależy od skali opracowania.
8a. Błąd położenia sytuacyjnej osnowy pomiarowej względem najbliższych punktów
poziomej osnowy geodezyjnej zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011
roku w sprawie standardów technicznych wykonywania geodezyjnych pomiarów
20
®®

sytuacyjnych i wysokościowych oraz opracowania i przekazywania wyników tych
pomiarów do państwowego zasobu geodezyjnego i kartograficznego
10 cm
9. Zasady wykonywania pomiarów sytuacyjno-wysokościowych reguluje:
a) instrukcja K-1,
b) instrukcje 0-1 i G-4
dlaczego 01???
,
INSTRUKCJA TECHNICZNA O-1 OGÓLNE ZASADY
WYKONYWANIA PRAC GEODEZYJNYCH Rozdział 3 pomiary sytuacyjne i wysokośiowej
c) wytyczne techniczne,
d) tylko instrukcja G-4.
Rozporządzeniem MSWiA z 9 listopada 2011 roku w sprawie standardów technicznych
wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz
opracowania i przekazywania wyników tych pomiarów do państwowego zasobu
geodezyjnego i kartograficznego
COŚ JESZCZE???
w zasadzie tylko to...
10. Pomiar czołówek w metodzie biegunowej zdejmowania szczegółów:
a) jest zbędny,
b) stanowi tylko uzupełnienie pomiaru w miejscach niedostępnych,
c) ma znaczenie tylko kontrolne,
d) stanowi uzupełnienie i jednocześnie kontrolę pomiaru.
A nie samą kontrolę? O “uzupełnieniu” pomiaru nic w rozporządzeniu nie ma.
Też się nad tym zastanawiam z tego samego powodu co Ty
uzupelnienie tez bo majac pomierzone np 3 naroza budynku, czwarte naroze
(niewidoczne ze stanowiska) mozna obliczyc na podstawie pomierzonych czolowek
11. Odchyłka kątowa w ciągu poligonowym stanowiąca podwójną wartość odchyłki
dopuszczalnej:
a) jest zawsze wynikiem błędu grubego,
b) jest dozwolona w każdej sytuacji,
c) jest dozwolona dla 30% ciągów w sieci,
d) wskazuje na błąd punktów nawiązania.
11a. Zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011 roku w sprawie standardów
technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych
oraz opracowania i przekazywania wyników tych pomiarów do państwowego zasobu
geodezyjnego i kartograficznego podczas geodezyjnych pomiarów sytuacyjnych
metodą ortogonalną długość linii pomiarowych nie powinny przekraczać na terenach
zurbanizowanych:
§ 34. 1.
250 m
a na terenach rolnych i leśnych 400 m
12. Wartość dopuszczalnej odchyłki liniowej ciągu sytuacyjnego można znaleźć w:
a) instrukcji G-4,
21
®®

b) instrukcji K-1,
c) wytycznych technicznych,
d) w odpowiedzi na zgłoszenie roboty w WODGiK.
12a. Zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011 roku w sprawie standardów
technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych
oraz opracowania i przekazywania wyników tych pomiarów do państwowego zasobu
geodezyjnego i kartograficznego pomiar elementów ciągu wiszącego podlega weryfikacji
w drodze pomiaru, wykonanego z ostatniego punktu tego ciągu:
§ 20. 5. Pomiar elementów ciągu wiszącego podlega weryfikacji w drodze pomiaru,
wykonanego z ostatniego punktu tego ciągu, co najmniej jednego szczegółu
terenowego I grupy o znanych współrzędnych.
13. Przez pomiar kąta
poziomego
w dwóch położeniach lunety eleminują się błędy:
a) libeli,
b) indeksu,
c) runu,
d) kolimacji i inklinacji oraz mimośrodu limbusa względem alidady.
Moim zdaniem prawidłowa odpowiedź to odp b- indeksu. Odp d nie poniewaz w dwoch
pol. lunety na pewno nie eliminuje sie mimosrodu limbusa:P
a błąd indeksu nie dotyczy
czasem kąta pionowego?
a ja znalazłem coś takiego : “Łatwo zauważyć, że pomiar kierunku, realizowany w dwóch
położeniach lunety, jest wartością średnia błędnych kierunków, czyli jest wolny od
wpływu błędu mimośrodu.”
Racja błąd indeksu dotyczy kąta pionowego- mój błąd.
Pozatym błąd indeksu nie jest wyeliminowany w trakcie samego pomiaru - eliminacja
jest dopiero po obliczeniach w dzienniku (ta kontrola, czy [suma kątów z I i II poł]
=400g) nonono.<-
To jest bezsensowne wytlumaczenie bo blad kolimacji i inklinacji
tez nie jest wyeliminowany w trakcie “samego pomiaru” i tez trzeba go obliczyc. A to
ze w tachimetrach elektronicznych jest on wklepany do instrumentu ktory sam sobie
pooprawia odczyty ze wzgledu na te bledy to juz inna sprawa. Nie inaczej jest z bledem
indeksu- on tez moze byc wklepany do instrumentu elektronicznego:P
14. Układ współrzędnych „1965” powoduje istotne zniekształcenia:
a) kątów,
b) azymutów,
c) długości i powierzchni,
d) długości w południkach.
15. Poprawka mierzonej długości ze względu na pochylenie terenu jest:
a) ujemna,
b) znak zależy od pochylenia terenu,
c) zawsze pomijalna,
d) dodatnia.
16. Wagi ciągów w sieciach niwelacyjnych wyrównywanych metodą przybliżoną są:
a) zawsze równe 1,
b) wprost proporcjonalne do liczby stanowisk,
c) odwrotnie proporcjonalne do liczby stanowisk lub długości ciągów,
22
®®
d) wprost proporcjonalne do długości ciągów.
16a. Wagi danych obserwacyjnych w sieciach niwelacji geometrycznej wyrównywanych
metodą najmniejszych kwadratów są:
ta sama odp co w starym pytaniu 16
17. Niwelacja metodą przekrojów powinna być stosowana:
a) zawsze gdy trzeba wykonać mapę sytuacyjno-wysokościową,
b) tylko w terenie płaskim,
c) dla obiektów wydłużonych,
d) przy pomiarze rzeźby terenu w obszarach zwartych.
18. Interpolację warstwic wykonywać należy:
a) we wszystkich kierunkach w stosunku do pikiet sąsiednich,
b) tylko wzdłuż linii ściekowych lub grzbietowych,
c) w kierunku spadku terenu,
d) tylko w niwelacji siatkowej.11
19. Błąd zera łat znosi się przez zastosowanie:
a) nieparzystej liczby stanowisk niwelatora w ciągu,
b) równej długości celowych,
c) żabek niwelacyjnych,
d) parzystej liczby stanowisk niwelatora w ciągu.
20. Punkt o współrzędnych X=5 251 012,35m Y=6 632 085,12m w układzie „2000”
znajduje się w:
a) strefie 5,
b) strefie o południku osiowym 15st,
c) strefie o połudiku osiowym 18 st,
(strefie 6)
d) strefie o południku osiowym 6st.
21. Opis wysokości warstwic powinien:
a) być zwrócony górą cyfr w kierunku wzrostu wysokości terenu,
b) być umieszczony na każdej warstwicy,
c) być umieszczony na ramce arkusza mapy,
d) znajdować się w pobliżu linii nieciągłości terenu.
22. Kontrola orientacji limbusa przez wycelowanie na drugi punkt osnowy ma na celu:
a) eliminację błędu libeli teodolitu,
b) określenie wysokości tego punktu,
c) kontrolę prawidłowej identyfikacji punktów nawiązania,
d) wyznaczenie poprawki do kąta osnowy.
23. Które z podanych szczegółów sytuacyjnych terenu zaliczamy tylko do II grupy
dokładnościowej:
a) mosty, wiadukty, kanały, parki,
b) kanały, elementy podziemne uzbrojenia terenu, drzewa przyuliczne, tamy,
23
®®
c) boiska sportowe, groble, naturalne linie brzegowe wód płynących i stojących,
pomniki,
d) krawężniki, latarnie, tunele, ogrodzenia trwałe.
24. Który wzór na obliczenie teoretycznej sumy kątowej w ciągu poligonowym
nawiązanym dwustronnie, w którym zostały pomierzone kąty prawe (AP – azymut
początkowy, AK – azymut końcowy, n – liczba pomierzonych kątów) jest poprawny:
a) 180st*(n-2),
b) Ak - Ap + n*180st,
(suma teoretyczna dla kątów lewych)
c) 180st*(n+2),
d) Ap - Ak + n 180st.
24a. Który wzór na obliczenie teoretycznej sumy kątowej w ciągu poligonowym
zamkniętym,
w którym zostały pomierzone kąty wewnętrzne (Ap- azymut początkowy, Ak- azymut
końcowy, n - liczba pomierzonych kątów) jest poprawny:g
a) (n-2)*180st,
b) Ak - Ap + n*180st,
c) (n+2)*180st,
(suma teoretyczna kątów zewnetrzych)
d) Ap - Ak + n 180st
25. Przy obliczeniu i wyrównaniu pola powierzchni działek i użytków gruntowych na
mapie kolejność obliczeń poszczególnych elementów jest następująca:
a) obręb, kompleks, użytek gruntowy,
b) użytek gruntowy, działka,
c) obręb, kompleks, działka, kontury klasyfikacyjne w użytkach gruntowych,
d) obręb, użytek gruntowy, działka.
26. Podstawą podziału na sekcje mapy zasadniczej jest mapa topograficzna w skali:
a) 1:100 000,
b) 1:50 000,
c) 1:25 000,
d) 1:10 000.
27. Oś celowa lunety to:
a) prosta łącząca środek optyczny obiektywu i środek optyczny okularu,
b) prosta łącząca środek optyczny obiektywu i środek siatki celowniczej,
c) prosta łącząca środek optyczny okularu i środek siatki celowniczej,
d) prosta prostopadła do osi obrotu instrumentu.
28. Pomiar kąta w jednej serii oznacza:
a) pomiar tego kąta w dwóch położeniach lunety,
b) pomiar tego kąta w jednym położeniu lunety,
c) pomiar tego kąta w jednym położeniu lunety, ale przy dwóch niezależnych
nacelowaniach,
d) pomiar kąta na dwu różnych miejscach limbusa.
24
®®
29. Nieprostopadłość osi obrotu lunety od pionowej osi obrotu instrumentu to:
a) błąd kolimacji,
b) błąd libel,
c) błąd inklinacji,
d) błąd indeksu.
30. Jeśli błąd względny pomiaru długości nie może przekraczać 1/2000 to błąd
bezwzględny pomiaru odległości 100m nie może być większy od:
a) 8 cm,
b) 0.10 m,
c) 5 cm,
d) 20 cm.
31. Wielkości poprawek kątowych w ciągu poligonowym wyrównywanym sposobem
przybliżonym liczymy:
a) proporcjonalnie do wielkości kątów,
b) odwrotnie proporcjonalnie do wielkości kątów,
c) równomiernie,
d) dowolnie.
31a. Dokonując niwelacji profilów, zgodnie z Rozporządzeniem MSWiA z 9 listopada
2011 roku w sprawie standardów technicznych wykonywania geodezyjnych pomiarów
sytuacyjnych i wysokościowych oraz opracowania i przekazywania wyników tych
pomiarów do państwowego zasobu geodezyjnego i kartograficznego, odległość między
pikietami na przekroju podłużnym nie może być większa niż:
50 m
a odległość między pikietami na przekroju poprzecznym nie może być większa niż 25 m
32. W osnowie pomiarowej zgodnie z zalecaną przez GUGik instrukcją G-4 z 2002 roku
dopuszcza się układy ciągów sytuacyjnych:
a) tylko jednorzędowe,
b) co najwyżej trzyrzędowe,
c) wielorzędowe,
d) co najwyżej dwurzędowe.
Do pytania 32 35
§
7 G4 2002
Pomiarowa osnowa sytuacyjna jest jednorzędową, wyrównywaną ściśle z obliczeniem
błędów położenia punktów. Od zasady tej dopuszcza się wyjątek, którym jest ciąg
nawiązany jednopunktowo tzn. ciąg wiszący, gdy nie jest możliwe nawiązanie
dwupunktowe, ciąg taki nie może posiadać więcej niż dwa boki.
Czy z tego aby nie wynika, że dopuszczalne są osnowy co najwyżej dwurzędowe
skoro ciąg wiszący sama nie wiem???
Wydaje mi się że jednorzędowo w takim
razie. Wyjątek - tutaj chyba tyczy się tego wyrównania ścisłego, które jest
niemożliwe dla ciągu wiszącego. Ale może niech ktoś potwierdzi, czy dobrze
rozumuję.
25
®®
32a. W osnowie pomiarowej, zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011 roku
w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych
i wysokościowych oraz opracowania i przekazywania wyników tych pomiarów do
państwowego zasobu geodezyjnego i kartograficznego, dopuszcza się układy sieci ciągów
sytuacyjnych:
jednorzędowych
33. Przy pomiarze kierunku poziomego, przy celowaniu na wierzchołek 2-metrowej
tyczki oddalonej od stanowiska o 100m i odchylonej w płaszczyźnie kolimacyjnej o 10⁰ od
pionu popełniamy błąd w wyznaczeniu kierunku z tytułu wychylenia tyczki:
a) równy 5',
b) zależny od wielkości wychylenia tyczki,
c) zależny od odległości pomiędzy stanowiskiem a celem,
d) równy 0st00'00".
jaki jest na to wzór? jak to pojąć?
(płaszczyzna kolimacyjna
to płaszczyzna zawierająca jedno z ramion kata poiomego wiec pochylenie w tej
plaszczynie nie wplywa na bład pomiaru kąta poziomego (wpływa na błąd pomiaru
długości i wysokosci)
inaczej można powiedzieć, że płaszczyzna kolimacyjna to pionowa płaszczyzna
z
zawierająca oś celową instrumentu
t
yczka pochyla się do ciebie, a nie na boki, więc kąt się nie zmienia
34. Długości ciągów sytuacyjnych w osnowie pomiarowej mogą wynosić:
a) do 5 km
b) powyżej 2 km
c) do 2 km, a w terenach rolnych i leśnych do 4 km
d) najwyżej do 3 km
Nasze ulubione rozporządzenie, paragraf 20, punkt 3
35. Czy w osnowie pomiarowej dopuszczalne są trzy rzędy linii pomiarowych:
a) tylko w osnowie pomiarowej wyznaczonej technologią GPS
b) tak
c) nie
G-4: “
W szczególnie trudnych warunkach (np. zakamarki gęstej zabudowy) dopu-szcza się
tworzenie linii rzędu drugiego“ o trzecim rzędzie linii pomiarowych nic nie ma.
Podobnie w nowym rozporządzeniu nic na ten temat nie znalazłem.
no tak: w starej G-4 było napisane ze mogą byc trzy rzędy linii wiec odpowiedz c) dobra
d) tylko w osnowie pomiarowej w postaci związku liniowego
36. Czy instrukcja G-4 dopuszcza ciągi wiszące w osnowie pomiarowej:
a) tak, jeżeli ciąg ma nie więcej niż 3 boki
b) tak, jeżeli ciąg ma najwyżej 2 boki
c) nie dopuszcza
d) tak, gdy długość ciągu nie jest większa od 1,5 km
36a. Czy Rozporządzenie MSWiA z
9 listopada 2011 roku w sprawie standardów technicznych wykonywania geodezyjnych
pomiarów sytuacyjnych i wysokościowych oraz opracowania i przekazywania wyników
26
®®
tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego dopuszcza ciągi
wiszące w osnowie pomiarowej:
tak, jeżeli ciąg ma najwyżej 2 boki
+ weryfikacja z ostatniego punktu ciągu: pomiar na przynajmniej jeden szczegół I grupy
dokł.
37. Pole działki na mapie w skali 1:2000 wynosi 100cm2.
Na mapie w skali 1:500 pole tej samej działki wynosi:
a) 400 cm2
b) 0,16 m2
c) 25 cm2
d) 160 cm2
38. Dane jest godło mapy 352.124. Cyfra 3 oznacza w nim:
- numer strefy odwzorowawczej układu 1965
39. Wymiary ramek sekcyjnych mapy zasadniczej w jednostkach terenowych:
a) zależą od skali mapy
wymiary ramek sekcyjnych w przeliczeniu na JEDNOSTKI
TERENOWE dla każdej skali będą inne
b) zależą od treści mapy
c) zależą od wielkości obszaru przedstawionego na mapie
d) są stałe
w K1 pisze coś o wymiarach 500 x 800 mm
Wymiary ramek sekcyjnych ograniczających rysunek mapy są jednakowe i wynoszą 500 x
800 mm.
to się tyczy rozmiaru mapy, a nie w terenie
Niezależnie od skali, każdy arkusz mapy ma wymiar 50 x 80 cm, natomiast zakres
pokrycia terenu jest następujący:
skala 1:5000 - 2.5 x 4.0 km
skala 1:2000 - 1.0 x 1.6 km
skala 1:1000 - 0.5 x 0.8 km
skala 1:500 - 0.25 x 0.4 km
W pytaniu chodzi o zakres pokrycia ( jednostki terenowe) więc odp a jest dobra. Dane dla
ukladu 2000.
40. Suma odczytów kręgu pionowego z I i II położenia lunety wynosi 400g.08. Obliczony
błąd indeksu ma wartość:
+4c
41. Metoda niwelacji ze środka eliminuje między innymi błąd:
a) niepionowości osi obrotu niwelatora
b) libeli alidadowej
c) niepionowego ustawienia łat
d) nierównoległości osi celowej lunety do osi libeli niwelacyjnej lub nieprawidłowej
kompensacji pochylenia lunety
27
®®
42. Błąd pomiaru kierunku w jednym położeniu lunety wynosi mk=10cc. Ile będzie
wynosił błąd pomiaru kąta pomierzonego w jednej serii:
10cc
jaki jest na to wzór?
Z prawa przenoszenia się błędów ( to z pochodnymi
cząstkowymi) A dokładniej jaki na błąd pomiaru kierunku i kata
10cc*pierw(2)/pierw(2), ponieważ pomiar w serii uwzględnia 2 położenia lunety, więc
zmniejsza błąd razy pierw(2); pomiar kąta uwzględnia pomiar dwóch kierunków więc
zwiększa błąd razy pierw(2).
43. Mapę zasadniczą sporządza się w skalach:
1:500, 1:1000, 1:2000, 1:5000
44. Na błąd odczytu z łaty odchylonej od pionu mają wpływ:
a) tylko kąt wychylenia łaty od pionu
b) kąt wychylenia łaty od pionu i wartość odczytu na łacie
c) wyłącznie wartość odczytu na łacie
d) wartość odczytu na łacie lub kąt wychylenia łaty od pionu
45. W niwelatorze automatycznym usuwanie błędu nieprawidłowej kompensacji
polega na:
a) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt na łacie za
pomocą leniwki alidadowej
b) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą
śruby elewacyjnej
c) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą
śrub ustawczych i ruchu leniwego
d) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą
śrubek rektyfikacyjnych krzyżyka kresek
46. Pomiary w wysokościowej osnowie pomiarowej wykonuje się technologią:
wg G-4 2002 geometryczna i GPS
wg nowego rozporzadzenia: geometryczna, trygonometryczna i satelitarna (GPS)
47. Odchyłkę otrzymaną z pomiaru „tam” i „z powrotem” ciągu niewelacyjnego
można w każdym przypadku rozrzucić:
a) proporcjonalnie do liczby stanowisk lub wyjątkowo proporcjonalnie do długości
odcinków niwelacyjnych
b) proporcjonalnie do długości odcinków niwelacyjnych
c) proporcjonalnie do liczby mierzonych punktów
d) proporcjonalnie do różnicy wysokości
47a. Zgodnie z Rozporządzeniem MSWiA z 9 listopada 2011 roku w sprawie standardów
technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych
oraz opracowania i przekazywania wyników tych pomiarów do państwowego zasobu
geodezyjnego i kartograficznego w niwelacji geometrycznej ciągu różnica między sumą
przewyższeń w kierunku głównym i powrotnym jest wyrażana w metrach i nie może być
28
®®
większa niż
jest wyrażana w metrach i nie może być większa niż wartość określona według wzoru:
≤0,04√L , gdzie L oznacza długość ciągu osnowy pomiarowej w km
0,04*pierwL
48. Przy wyznaczeniu punktów osnowy pomiarowej metodą wcięć
:
1) należy pomierzyć co najmniej 2 elementy kontrolne
2) nie ma potrzeby pomiaru elementów kontrolnych
3) należy pomierzyć co najmniej 1 element kontrolny (
.
Beluch: Geodezja I s.182)
4) należy pomierzyć co najmniej 3 elementy kontrolne
49. Jeżeli przyrost DXAB ma znak dodatni, a przyrost DYAB ma znak ujemny to azymut
boku AB (AAB) zawiera się w granicach.
1) 100g - 200g
2) 300g - 400g
3) 180o - 270o
4) 0g - 100g
300g - 400g lub 270o - 360o
50. Szczegóły terenowe wraz z elementami kontrolnymi:
1) mierzymy według uznania osoby wykonującej pomiar
2) mierzymy w zależności od celu pomiaru
3) nie mierzymy ponieważ instrukcja nie wymaga stosowania pomiaru kontrolnego
n4) mierzymy w przypadku pomiaru szczegółów grupy I
GEODEZJA 2
1. Kąty poziome są podstawowymi elementami sieci:
triangulacyjnych (kątowych)
- tylko jedna długość w trójkącie
[trilateracyjne- liniowe] - pomiar wyłącznie długości
2. Przy przeniesieniu współrzędnych niezbędne pomiary w siatce przeniesienia
wykonuje się na punktach:
>>bazowych siatki
3. Dla redukcji długości przestrzennej na powierzchnię odniesienia należy wyznaczyć:
>>wysokość punktu początkowego i końcowego oraz lokalny promień krzywizny Ziemi
Redukcje długości:
1) Atmosferyczna
D_atm = D_pom + ΔD_atm[mm/km] *10 do -6 D_pom
2) Kalibracyjna
D_k = c + (1 + dk[mm/km] * 10do-6) *D_atm
3) Na poziom osi obrotu lunety tachimetru z uwzględnieniem refrakcji i krzywizny
Ziemii
- dla płaszczyzny: S = Dk * sinZ
Dk- długość pomierzona
Z-kąt pionowy
29
®®
Φ cc = (Dk*sinZ)/(2*RA) ρcc
h = Dk cos (Z – (1-k)*φ)
β = Z – (2-k)*φ
4) Na poziom odniesienia
S0=S*R/(H+R+e)
5) Odwzorowawcza
W ukł. Lokalnych zazwyczaj pomijalna
W ukł. „2000”: dl2000 (mm/km) = 0,012271 (Ys – 500)2 – 77
Ys – wspłrz. Y środka boku bez nr strefy
6) Mimośrodowa
D=sqrt(e^2+s^2-2escosTheta)
4. Zredukowano długość na poziom osi obrotu lunety tachimetru. Do obliczenia długości
zredukowanej na powierzchnię odniesienia należy przyjąć:
???
współczynnik refrakcji= 0,13
za powierzchnię odniesienia kulę o promieniu R=6382km?
R
S - średni promień krzywizny elipsoidy dla środka boku
(przy redukcji na
powierzchnię elipsoidy GRS-80) , gdzie
ŚREDNI PROMIEŃ KRZYWIZNY ELIPSOIDY:
5. Czy znak poprawki przy redukcji długości przestrzennej do poziomu jest:
>>niezależny od wielkości i znaku kąta pionowego.
Redukcja na poziom odniesienia w układzie „2000” [undulacja ok. 34m]
S0=S*(R/(H+R+e))
e- undulacja (różnica wysokości między geoidą, a elipsoidą)
W pytaniu chodzi o poziom odniesienia czy poziom osi obrotu lunety?
6. Dokładność pomiaru kątów zależy:
od klasy teodolitu i technologii pomiaru
7. Jaka jest wzajemna odległość punktów poziomej geodezyjnej osnowy szczegółowej II
klasy:
0,5-2,5km (a do punktów nawiązania-nie więcej niż 5km)-
w którym miejscu w rozporządzeniu
to jest?
0,5 - 8km
(ta odpowiedź moim zdaniem jest prawidłowa, można to wydedukować z instrukcji
G-1 § 63)
30
®®

Instrukcja G-1 tez juz przestala obowiazywac. Zastąpiło ją rozporządzenie z 14 lutego
2012 r. 0.5-8 km jest prawidłową odpowiedzią zgodnie z instruckją G-1
§ 63.
Rozporządzenie z 14.02.12 (załącznik 1, rozdział 6) dot. osnów szczegółowych (ale
wg rozp. wydaje mi się, że są one tylko III kl. może mnie ktoś poprawić par.3 tegoż
rozp.):
Dla GPS brak ograniczen?
11. Przy ustalaniu lokalizacji punktów przewidzianych do pomiaru metodą
poligonizacji
należy uwzględnić następujące warunki:
1) ciągi powinny być zbliżone do prostoliniowych;
2) każdy ciąg powinien być nawiązany obustronnie kątowo i liniowo;
3) długości ciągów pojedynczych nie powinny przekraczać 3,0 km, a ciągów
wyznaczających punkty węzłowe – 2,0 km;
4) długości boków w ciągach powinny wynosić od 150 m do 500 m, przy czym
średnia
długość boku na terenach miejskich nie powinna przekraczać 250 m, a na
pozostałych
terenach – 350 m
8
. Błąd pomiaru odległości dalmierzami elektromagnetycznymi:
>>zależy od długości mierzonego odcinka i dokładności centrowania instrumentów
pomiarowych
9. Stała dodawania w dalmierzach elektronicznych odnosi się tylko do:
>>zestawu dalmierz + reflektor
10. Punkty geodezyjnych osnów szczegółowych na obszarach zabudowanych (miasta)
najkorzystniej jest wyznaczać:
>>metodą poligonową z wykorzystaniem tachimetrów elektronicznych
wg nowego rozporzadzenia: metoda kombinowana (GNSS i poligony)
wg starych: poligony
11. Dla redukcji długości zmierzonych ze stanowisk mimośrodowych wystarczy
wyznaczyć:
>>element liniowy i kąt dyrekcyjny
(e, s, θ)
12. Siatkę przeniesienia współrzędnych zakłada się dla wyznaczenia:
współrzędnych punktu przeniesienia
13. Nieuwzględnienie zjawiska refrakcji obciąża pomiary długości błędem:
systematycznym
31
®®

13a.Największy wpływ na dokładność wyznaczanej poprawki redukcyjnej do
kierunków mierzonych mimośrodowo ma:
- średni błąd wyznaczenia poprawki jest odwrotnie proporcjonalny do długości odcinka
łączącego stanowisko centryczne z celem centrycznym
- max wpływ średniego błędu wyznaczenia mimośrodu liniowego występuje w
wypadków kątów dyrekcyjnych bliskich 90st a minimalny w wypadku kątów bliskich 00
- wpływ śr błędu wyznaczenia kąta dyr na śr błąd poprawki w dużym stopniu zależy od
wielkości mimośrodów liniowych; max wpływ gdy kąty dyr bliskie 00 , a min gdy bliskie
90st.
Beluch str. 163 wzór 3.44 (wg mnie chodzi o dł. łączącą stanowisko centryczne z celem
centrycznym)
-błąd pomiaru elementu liniowego mimośrodu-
analiza wpływu tych błędów pokazywała, że element liniowy mamy mierzyć b. dokładnie,
kątowy z dokł. do kilku c
14a. W przypadku punktu niedostępnego elementy mimośrodu mogą być:
Mierzone bezpośrednio lub pośrednio; kąta (element liniowy czyli odcinek mimośrodu
oraz element kątowy- kąt dyrekcyjny -> mierzony na punkcie mimośrodowym zgodnie
z ruchem wskazówek zegara), kierunków; stanowiska, celu bądź stanowiska i celu.
-wyznaczone sposobami pośrednimi
14. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego metodą
wcięcia wstecz należy pomierzyć:
2 kąty poziome pomiędzy punktami o znanych współrzędnych na punkcie
wyznaczanym
15. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego metodą
wcięcia kątowego w przód należy pomierzyć:
2 kąty poziome na punktach o znanych współrzędnych
15a. Nieuwzględnienie zjawiska refrakcji obciąża pomiary długości błędem
>>systematycznym
16. Dla jednoznacznego określenia współrzędnych punktu wyznaczanego wcięciem w
przód niezbędne są:
2 punkty o znanych współrzędnych
16a. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego metodą
wcięcia wstecz należy pomierzyć:
>>2 kąty poziome na punkcie wyznaczanym
17. Dla jednoznacznego określenia współrzędnych punktu wyznaczanego wcięciem
wstecz niezbędne są wizury na:
32
®®

3 punkty o znanych współrzędnych
17a. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego metodą
wcięcia kątowego w przód należy pomierzyć:
>>dwa kąty poziome na punktach o znanych współrzędnych
18. Punkty trwałych osnów geodezyjnych w terenie mogą być utrwalone:
a) wyłącznie sztucznie (znaki geodezyjne),
b) wyłącznie trwale (elementy budowli),
c) sztucznie (znaki geodezyjne) i trwale (elementy budowli),
d) poprzez markowanie.
19. Centrowanie przyrządów pomiarowych nad punktami geodezyjnymi osnów
szczegółowych II klasy należy wykonać w stosunku do centra:
znaku podziemnego
20. Przyrządy pomiarowe nad centrem znaku geodezyjnego podczas pomiaru
elementów geodezyjnych osnów szczegółowych centruje się z wykorzystaniem pionów:
optycznych
21. Najbardziej wiarygodną oceną dokładności pomiarów kątowych przed
wyrównaniem uzyskujemy na podstawie wyników:
odchyłki zamknięc figur - wzrór Ferrero
21a. Półpoligony, to:
Siatki zespołów stabilizacyjnych (poboczników, ekscentrów, punktów przeniesienia
współrzędnych) punktów macierzystych, włączonych do wyrównania całości sieci.
Konstrukcje takie, nazywane też „półpoligonami”, spełniają funkcję dodatkowego
zabezpieczenia lub ułatwiają korzystanie z punktów macierzystych. Tworzą one
niejednorodną pod względem geometrycznym konstrukcję całej sieci.
22. Ocenę dokładności wyników pomiarów przed ich wyrównaniem przeprowadza się
dla:
a) tylko dla oceny poprawności wykonanych pomiarów,
b) ustalenia wag,
c) wyznaczenia ostatecznych ich wartości,
d) wyznaczenia poprawek.
23. Dla dokonania transformacji współrzędnych niezbędna jest znajomość:
współrzędnych punktów dostosowania
23a. Aby wyznaczyć jednoznacznie współrzędne stanowiska w oparciu o dwa punkty o
znanych współrzędnych należy na nim pomierzyć:
Wcięcie kątowo-liniowe
Kąt poziomy między punktami o znanych współrzędnych oraz długość boku między
stanowiskiem, a jednym z punktów o znanych współrzędnych
33
®®

24. Minimalna liczba punktów dostosowania przy transformacji Helmerta wynosi:
2 punkty dostosowania
24a. Boki osnowy szczegółowej III klasy zakładanej wg instrukcji G-1 wynoszą:
Długości boków w ciągach powinny wynosić od 150m do 600m, przy czym średnia
długość boku w każdym ciągu nie powinna być mniejsza od 300m.
[długości ciągów pojedynczych nie powinny być większe od 4,5km, a ciągów
wyznaczających punkty węzłowe-do 3,0km]
25. Wzór Helmerta traktuje o wpływie ograniczonej dokładności centrowania przyrządów
pomiarowych na wyniki pomiarów:
kątowych
25a. Błąd położenia punktów osnowy III klasy zakładanej metodami klasycznymi wg
instrukcji G-1 nie przekraczał:
dla punktów osnowy szczegółowej III klasy nie większy niż 10cm [II klasy nie większy
niż 5cm].
26. Największym błędem z tytułu niedokładnego centrowania przyrządów
pomiarowych obarczone są wyniki pomiarów kątowych przy celowych:
bardzo krótkich
26a. Pomiar osnowy szczegółowej z wykorzystaniem GPS wykonuje się metodą:
statyczną lub różnicową
różnicowa dGPS nie słuzyla kiedys do wyznaczania pola dzialek z dokladnoscia kilku
metrow?r daczej z taka dokladnoscia nie służy do pomiarów osnowy. chyba dr uznanski
tak mowil, ale pewny nie jestem.
“Punkty szczegółowej poziomej osnowy geodezyjnej zakłada się w sieciach,
wykorzystując
obserwacje statycznych pomiarów satelitarnych GNSS, pomiarów wykonywanych
w ramach systemu ASG-EUPOS oraz klasycznych pomiarów metodą poligonizacji
i wcięć.” To jest z nowego rozporządzenia
MINISTRA ADMINISTRACJI I CYFRYZACJI z dnia
14 lutego 2012 r. w sprawie osnów geodezyjnych, grawimetrycznych i magnetycznych
Potwierdzam z tego co uczyliśmy się na fakultecie to metodY różnicowe nie są nawet
metodami geodezyjnymi ze względu na dokładność, ale często w terminologii są mylone
z metodami względnymi. Miejmy nadzieję, że osoba układająca odpowiedzi ma o tym
jakiekolwiek pojęcie . Prawidłową odpowiedzią jest tu jedynie metoda statyczna
Na pewno ma większe pojęcie niż ty... ← piwo !
ASG-EUPOS są różnicowe? Potwierdzi ktoś? potwierdzam
27. Dla wyznaczenia różnicy wysokości punktów metodą niwelacji trygonometrycznej
należy wyznaczyć:
34
®®
a) tylko kąt pionowy i odległość,
b) tylko współczynnik refrakcji i promień Ziemi,
c) tylko wysokość ustawienia przyrządów pomiarowych,
d) kąt pionowy, odległość, współczynnik refrakcji, promień Ziemi i wysokość
ustawienia przyrządów pomiarowych.
27a. Koordynacja dokładnościowa pomiarów w sieciach geodezyjnych ma na celu:
zrównoważenie wpływu pomiarów na błędy wyznaczenia położenia punktów sieci.
28. Poprawkę do różnicy wysokości ze względu na krzywiznę powierzchni odniesienia w
niwelacji trygonometrycznej:
a) należy wprowadzać ze znakiem "-",
b) należy wprowadzać ze znakiem "+",
c) należy wprowadzać przy krótkich celowych,
d) nie należy wprowadzać nigdy.
28a. Najbardziej wiarygodną oceną dokładności pomiarów kątowych przed
wyrównaniem uzyskujemy na podstawie wyników:
patrz pyt. 21.
analizy odchyłek zamknięć figur
29. Poprawkę do różnicy wysokości ze względu na krzywiznę powierzchni odniesienia w
niwelacji trygonometrycznej:
patrz 28
29a. Ocenę dokładności wyników pomiarów przed ich wyrównaniem przeprowadza się
dla:
patrz pyt. 22.
ustalenia wag
30. Dokładna znajomość współczynnika refrakcji w niwelacji trygonometrycznej jest
istotna w przypadku:
a) wyłącznie krótkich celowych,
b) wyłącznie małych różnic wysokości,
c) tylko dużych kątów pochylenia,
d) dużych kątów pochylenia i długich celowych.
30a. Dla dokonania transformacji współrzędnych niezbędna jest znajomość:
patrz pyt.
23.
- współrzędnych punktów dostosowania,
- parametrów transformacji.
31. Odchylenie łaty od linii pionu w płaszczyźnie kolimacyjnej obarcza błędem:
a) tylko wyznaczoną różnicę wysokości,
b) tylko wyznaczoną odległość,
c) wyznaczoną różnicę wysokości i wyznaczoną odległość,
d) nie obarcza błędem żadnej z nich.
31a. Minimalna liczba punktów dostosowania przy transformacji Helmerta wynosi:
patrz pyt. 24.
dwa punkty
35
®®

32. W ciągu niwelacyjnym pomierzonym w kierunku „głównym” i „powrotnym”
poprawki do różnic wysokości odcinków niwelacyjnych liczymy:
a) proporcjonalnie do kwadratów długości odcinków niwelacyjnych,
b) odwrotnie proporcjonalnie do kwadratów długości odcinków niwelacyjnych,
c) proporcjonalnie do długości odcinków niwelacyjnych,
d) odwrotnie proporcjonalnie do długości odcinków niwelacyjnych,
a nie b?
(nie, bo chodzi o dlugości odpowiednich odcinków niwelacyjnych (Li) a nie
długość calego ciągu niwelacyjnego (L)
32a. Wzór Helmerta traktuje o wpływie ograniczonej dokładności centrowania
przyrządów pomiarowych na wyniki pomiarów:
kątowych
33. Znak różnicy wysokości wyznaczonej met odą niwelacji trygonometrycznej zależy:
od znaku i wielkości przewyższenia i od wysokości ustawienia teodolitu i sygnału
33a. Największym błędem z tytułu niedokładnego centrowania przyrządów pomiarowych
obarczone są wyniki pomiarów kątowych przy celowych:
patrz pyt. 26.
krótkich
34. Dokładność różnicy wysokości wyznaczanej metodą niwelacji trygonometrycznej przy
krótkich celowych zależy od:
błędu pomiaru kąta pionowego oraz odległości
34a. Dla wyznaczenia różnicy wysokości punktów metodą niwelacji trygonometrycznej
należy uwzględnić:
patrz pyt. 27.
kąt pionowy, odległość, promień Ziemi, współczynnik refrakcji, wysokości
instrumentów.
założenia: Ziemia jest kulą.
h= dk*cosZ-(1-k)*((dk^2*sin^2z)/(2*RA))
gdzie k-wsp. refrakcji, RA=R+HA, Z-kąt pionowy, dk-odległość skośna
35. Boki osnowy szczegółowej III klasy wynoszą:
150m-600m (G-1)
patrz pyt. 24a
35a. Poprawkę do przewyższenia ze względu na krzywiznę powierzchni odniesienia w
niwelacji trygonometrycznej należy wprowadzać:
patrz pyt. 28.
ze znakiem +
ma to sens tylko dla dłuższych odległości.
36. Tachimetria elektroniczna może być stosowana przy opracowywaniu mapy:
a) tylko zasadniczej sytuacyjnej,
b) wysokościowej,
c) zasadniczej sytuacyjnej i wysokościowej,
d) żadnej
36
®®
36a. Poprawkę do różnicy wysokości ze względu na krzywiznę powierzchni odniesienia w
niwelacji trygonometrycznej:
czy przewyższenie i różnica wysokości nie jest tym samym
pojęciem w tym wypadku?
pyt. 28 i pyt. 35a
ze znakiem +
ma to sens tylko dla dłuższych odległości. Wydaje mi się, że to to samo.
37. Szczegóły sytuacyjne przy opracowywaniu wyników pomiarów tachimetrycznych
wykonywanych tachimetrem elektronicznym nanosi się na mapę na podstawie:
a) współrzędnych biegunowych,
b) współrzędnych prostokątnych,
c) długości,
d) kątów poziomych.
37a. Dokładna znajomość współczynnika refrakcji w niwelacji trygonometrycznej jest
istotna w przypadku:
niskich wartości kąta zenitalnego i długich celowych
38. Podstawę podziału na arkusze w Międzynarodowej Mapie Świata stanowi:
arkusz mapy w skali 1 : 1 000 000
38a. W ciągu niwelacji trygonometrycznej pomierzonym w kierunku „głównym”
i „powrotnym” poprawki do różnic wysokości odcinków niwelacyjnych liczymy :
proporcjonalnie do kwadratów długości odcinków niwelacyjnych
vi=-f*(di^2/sumadi^2)
0
39. Sytuacja na mapach topograficznych przedstawiona jest za pomocą tylko:
a) rzutów ortogonalnych,
b) znaków topograficznych,
c) objaśnień,
d) rzutów ortogonalnych, znaków topograficznych, objaśnień.
39. Znak różnicy wysokości wyznaczonej metodą niwelacji trygonometrycznej zależy:
od znaku i wielkości przewyższeniaa a i od wysokości ustawienia teodolitu i sygnału.
czyli od tego czy cel znajduje się niżej czy wyżej od osi celowej
pyt 33
40. Układ państwowy „1992”został wprowadzony do sporządzania map:
topograficznych
patrz pyt. 46a
40a. Dokładność różnicy wysokości wyznaczanej metodą niwelacji trygonometrycznej
przy krótkich celowych zależy od:
to samo co 34
błędów pomiaru kąta pionowego oraz odległości.
41. Obecnie mapy dla celów gospodarczych opracowuje się w odwzorowaniu:
Gaussa-Krugera
41a. Kompensatory w instrumentach geodezyjnych służą do:
wyznaczenia i stabilizacji kierunku pionu lub poziomu
37
®®

42. Największy wpływ na dokładność wyznaczanej poprawki redukcyjnej do kierunków
mierzonych mimośrodowo ma:
bład pomiaru elementu liniowego e
---->
13a.
42a. Tachimetria elektroniczna może być stosowana przy opracowywaniu mapy:
patrz pyt. 36.
zasadniczej sytuacyjnej i wysokościowej
każdej.
43. Odwzorowanie Gaussa-Krügera jest
:
walcowe, poprzeczne odwzorowanie wiernokątne, styczne
4
3a. Szczegóły sytuacyjne przy opracowywaniu wyników pomiarów tachimetrycznych
wykonywanych tachimetrem elektronicznym nanosi się na mapę na podstawie:
współrzędnych prostokątnych
patrz pyt. 37.
44. Zestaw liczb 829.346 może być w warunkach Polski godłem arkusza mapy:
nie może być
44a. Podstawę podziału na arkusze w Międzynarodowej Mapie Świata stanowi:
arkusz mapy w skali 1:1 000 000 (miliona)
patrz pyt. 38.
podział na N i S, pasy A-Z, słupy 1-60.
45. W przypadku punktu niedostępnego elementy mimośrodu mogą być:
wyznaczone pośrednio
---> 14a
45a. Sytuacja na mapach topograficznych przedstawiona jest za pomocą tylko:
rzutów ortogonalnych, znaków topograficznych, objaśnień.
patrz pyt. 39.
46. Kryteria zakładania poziomych osnów geodezyjnych podane są w instrukcjach:
G -1
teraz nowe rozporzadzenie o osnowach geod, grawimetrycznych, …
ROZPORZĄDZENIE MINISTRA ADMINISTRACJI I CYFRYZACJI z dnia 14 lutego 2012 r.
w sprawie osnów geodezyjnych, grawimetrycznych i magnetycznych - tylko pytanie
ogólnie jest o instrukcje, więc czy trzeba podawać to rozporządzenie ?
Jeżeli instrukcje już nie obowiązują w ogólne nie powinno być takich pytań.
Bierzcie pod
uwagę, że mogą dać to samo pytanie tylko “podane są w źródłach prawnych...”
46a. Układ państwowy „1992”został wprowadzony do sporządzania map:
urzędowych topograficznych
1 strefa dla Polski, el. GRS 80, południk środkowy 19 (największe zniekształcenia w
środku), odwz. Gaussa-Krugera, nomenklatura międzynarodowej mapy świata.
47. Koordynacja dokładnościowa pomiarów w sieciach geodezyjnych ma na celu:
zrównoważenie wpływu pomiarów na błędy wyznaczenia położenia punktów w sieci
47a. Obecnie mapy dla celów gospodarczych opracowuje się w odwzorowaniu:
Gaussa Krugera.
patrz pyt. 41.
38
®®

48. W układzie państwowym „1992” godło w postaci M-34-108-A-a oznacza mapę
topograficzną:
w skali 1:25000
48. Odwzorowanie Gaussa-Krügera jest:
wiernokątne, walcowe, poprzeczne
niewierno powierzchniowe i odległościowe. Punkt przyłożenia walca na środku
każdego pasa (przykładowo w układzie 2000 dla Polski 4 pasy)
49. Wstępne analizy dokładnościowe mają na celu:
ustalenie wymaganej dokładności pomiarów w sieci i ustalenie optymalnej konstrukcji
sieci
49a. Zestaw liczb 829.346 może być w warunkach Polski godłem arkusza mapy:
nie może wystąpić w Polsce przede wszystkim. Jeżeli podadzą odpowiednio niższe
wartości, mógłby być w tej postaci godłem w dla mapy w skali 1:10 000 w układzie 65.
W układzie 65 jaki może myć numer pasa i słupa dla Polski jakie wartość przyjmować??
Wydaje mi się, że w układzie 65 pasów jak i słupów jest 9.
50. Kompensatory w instrumentach geodezyjnych służą do:
wyznaczenia i stabilizacji
kierunku pionu lub poziomu
50. W układzie państwowym „1992” godło w postaci M-34-108-A-a oznacza mapę
topograficzną:
W skali 1:25 000
godło:
M-34-108 skala 1:100 000
M-34-108-A skala 1:50 000
M-34-108-A-a-2 skala 1:10 000.
Jest to nomenklatura międzynarodowej mapy świata.
1. Kąty poziome są podstawowymi elementami sieci:
1) liniowych,
2) kątowo - liniowych,
3) triangulacyjnych,
4) niwelacyjnych.
2. Przy przeniesieniu współrzędnych niezbędne pomiary w siatce
przeniesienia wykonuje się na punktach:
1) macierzystych (właściwych),
2) kierunkowych,
3) bazowych siatki,
4) macierzystych i bazowych.
3. Dla redukcji długości przestrzennej na powierzchnię odniesienia należy
wyznaczyć:
39
®®
1) różnicę wysokości jej początku i końca,
2) wysokość punktu początkowego i końcowego oraz promień kuli R,
3) kąt poziomy,
4) wysokość ustawienia dalmierza i reflektora nad punktami.
4. Zredukowano długość na poziom osi obrotu lunety tachimetru. Do
obliczenia długości zredukowanej na powierzchnię odniesienia należy
przyjąć:
5. Czy znak poprawki przy redukcji długości przestrzennej do poziomu jest:
1) zależny od wielkości kąta jej pochylenia,
2) zależny od znaku kąta jej pochylenia,
3) zależny od wielkości i znaku kąta jej pochylenia,
4) niezależny od wielkości i znaku kąta jej pochylenia.
6. Dokładność pomiaru kątów zależy:
1) tylko od klasy teodolitu,
2) tylko od technologii pomiaru,
3) od klasy teodolitu i technologii pomiaru,
4) od różnicy wysokości stanowiska i celu.
7. Jaka jest wzajemna odległość punktów poziomej geodezyjnej osnowy
szczegółowej II klasy:
1) od 15 do 25 km,
2) około 7 km,
3) od l.0 do 5.0 km,
0,5 - 8km
4) około 300 m.
8. Błąd pomiaru odległości dalmierzami elektromagnetycznymi:
1) zależy tylko od długości mierzonego odcinka,
2) zależy tylko od dokładności centrowania instrumentów pomiarowych,
3) zależy od długości mierzonego odcinka i dokładności centrowania instrumentów
pomiarowych,
4) jest niezależny od długości odcinka i dokładności centrowania.
9. Stała dodawania w dalmierzach elektronicznych odnosi się tylko do:
1) dalmierza,
2) reflektora,
40
®®
3) zestawu dalmierz + reflektor,
4) warunków atmosferycznych.
10. Punkty geodezyjnych osnów szczegółowych na obszarach
zabudowanych (miasta) najkorzystniej jest wyznaczać:
) metodą poligonową z wykorzystaniem tachimetrów elektronicznych,
2) metodą satelitarną,
3) metoda triangulacyjną,
4) metodą biegunową.
11. Dla redukcji długości zmierzonych ze stanowisk mimośrodowych
wystarczy wyznaczyć:
1) różnicę wysokości centrów i mimośrodów,
2) promień krzywizny Ziemi,
3) element liniowy mimośrodu,
4) element liniowy i kąt dyrekcyjny.
12. Siatkę przeniesienia współrzędnych zakłada się dla wyznaczenia:
1) elementów mimośrodu,
2) współrzędnych punktu przeniesienia,
3) współrzędnych punktu kierunkowego,
4) wysokości punktu niedostępnego.
13. (przy kącie dyrekcyjnym 200g)
Największy wpływ na dokładność
wyznaczanej poprawki redukcyjnej do kierunków mierzonych
mimośrodowo ma:
1) błąd pomiaru kąta dyrekcyjnego,
2) błąd pomiaru elementu liniowego mimośrodu,
3) błąd wyznaczenia długości celowej,
4) żaden z wymienionych błędów.
14. W przypadku punktu niedostępnego elementy mimośrodu mogą być:
1) pomierzone bezpośrednio,
2) określone graficznie,
3) wyznaczone pośrednio,
4) pominięte.
15. Nieuwzględnienie zjawiska refrakcji obciąża pomiary długości błędem:
systematycznym
41
®®
16. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego
metodą wcięcia wstecz należy pomierzyć:
1) 2 kąty poziome na punktach o znanych współrzędnych,
2) 2 kąty poziome na punkcie wyznaczanym,
3) po jednym kacie na punkcie o znanych współrzędnych i wyznaczanym,
4) po jednym kacie poziomym i pionowym,
17. Dla jednoznacznego określenia współrzędnych punktu wyznaczonego
metodą wcięcia kątowego wprzód należy pomierzyć:
1) po jednym kącie na punkcie wyznaczanym i o znanych współrzędnych,
2) dwa kąty poziome na punktach o znanych współrzędnych,
3) długości obu celowych,
4) dwa kąty pionowe.
18. Dla jednoznacznego określenia współrzędnych punktu wyznaczanego
wcięciem wprzód niezbędne są:
16. Dla jednoznacznego określenia współrzędnych punktu wyznaczanego wcięciem
wprzód niezbędne są:
1) dwa punkty o znanych współrzędnych,
2) trzy punkty o znanych współrzędnych,
3) dwa punkty kierunkowe,
4) cztery poboczniki.
19. Dla jednoznacznego określenia współrzędnych punktu wyznaczanego
wcięciem wstecz niezbędne są wizury na:
1) trzy punkty o znanych współrzędnych,
2) dwa punkty o znanych współrzędnych.
3) cztery poboczniki,
4) trzy punkty kierunkowe.
20. Punkty trwałych osnów geodezyjnych w terenie mogą być utrwalone:
1) wyłącznie sztucznie (znaki geodezyjne),
2) wyłącznie trwale (elementy budowli),
3) sztucznie (znaki geodezyjne) i trwale (elementy budowli),
4) poprzez markowanie.
21. Półpoligony to:
42
®®
22. Centrowanie przyrządów pomiarowych nad punktami geodezyjnymi
osnów szczegółowych II klasy należy wykonać w stosunku do centra:
1) znaku naziemnego,
2) znaku podziemnego,
3) poboczników,
4) znaku zamarkowanego.
23. Aby wyznaczyć jednoznacznie współrzędne stanowiska w oparciu o
dwa punkty o znanych współrzędnych należy na nim pomierzyć:
24. Boki osnowy szczegółowej III klasy zakładanej wg instrukcji G-1
wynoszą:
długości boków w ciągach powinny wynosić od 150m do 600m, przy czy średnia
długość boku w każdym ciągu nie powinna być mniejsza niż 300 m
25. Błąd położenia punktów osnowy III klasy zakładanej metodami
klasycznymi wg instrukcji G-1 nie przekraczał:
26. Pomiar osnowy szczegółowej z wykorzystaniem GPS wykonuje się
metodą:
27. Koordynacja dokładnościowa pomiarów w sieciach geodezyjnych ma
na celu:
1) ocenę dokładności pomiarów,
2) zrównoważenie wpływu pomiarów na błędy wyznaczenia położenia punktów w sieci,
3) odrzucenie obserwacji odskakujących,
4) wykrycie grubych błędów w sieci.
28. Najbardziej wiarygodną oceną dokładności pomiarów kątowych przed
wyrównaniem uzyskujemy na podstawie wyników:
1) wyrównań stacyjnych,
2) analizy wpływu błędów instrumentalnych i operacyjnych,
3) analizy odchyłek zamknięć figur,
4) wyrównania par spostrzeżeń.
29. Ocenę dokładności wyników pomiarów przed ich wyrównaniem
przeprowadza się dla:
1) oceny poprawności wykonanych pomiarów,
2) ustalenia wag,
3) wyznaczenia ostatecznych ich wartości,
4) wyznaczenia poprawek.
43
®®
30. Dla dokonania transformacji współrzędnych niezbędna jest znajomość:
1) współrzędnych punktów dostosowania,
2) punktów kierunkowych,
3) odwzorowania kartograficznego,
4) skali mapy.
31. Minimalna liczba punktów dostosowania przy transformacji Helmerta
wynosi:
1) jeden,
2) dwa,
3) trzy,
4) cztery.
32. Wzór Helmerta traktuje o wpływie ograniczonej dokładności
centrowania przyrządów pomiarowych na wyniki pomiarów:
1) kątowych,
2) liniowych,
3) wysokościowych,
4) szczegółowych.
33. Największym błędem z tytułu niedokładnego centrowania przyrządów
pomiarowych obarczone są wyniki pomiarów kątowych przy celowych:
1) długich,
2) krótkich,
3) skośnych,
4) przebiegających w bliskim sąsiedztwie przeszkód.
34. Dla wyznaczenia różnicy wysokości punktów metodą niwelacji
trygonometrycznej należy uwzględnić:
) tylko kąt pionowy i odległość,
2) tylko współczynnik refrakcji i promień Ziemi,
3) tylko wysokość ustawienia przyrządów pomiarowych,
4) kąt pionowy, odległość, współczynnik refrakcji, promień Ziemi i wysokość ustawienia
przyrządów pomiarowych.
35. Poprawkę
do przewyższenia
ze względu na krzywiznę powierzchni
odniesienia w niwelacji trygonometrycznej należy wprowadzać:
1) zawsze,
2) przy pewnych długościach celowych,
3) w określonych warunkach terenowych,
4) nigdy.
36. Poprawkę do różnicy wysokości ze względu na krzywiznę powierzchni
odniesienia w niwelacji trygonometrycznej:
) należy wprowadzać ze znakiem "-",
2) należy wprowadzać ze znakiem "+",
44
®®
3) należy wprowadzać przy krótkich celowych,
4) nie należy wprowadzać nigdy.
37. Dokładna znajomość współczynnika refrakcji w niwelacji
trygonometrycznej jest istotna w przypadku:
1) wyłącznie krótkich celowych,
2) wyłącznie małych różnic wysokości,
3) tylko dużych kątów pochylenia,
4) dużych kątów pochylenia i długich celowych.
38. W ciągu niwelacji tryg
onometrycznej pomierzonym w kierunku „głównym”
i „powrotnym” poprawki do różnic wysokości odcinków niwelacyjnych
liczymy :
proporcjonalnie do kwadratów długości odcinków niwelacyjnych
39. Znak różnicy wysokości wyznaczonej metodą niwelacji
trygonometrycznej zależy:
1) tylko od znaku i wielkości przewyższenia,
2) tylko od wysokości ustawienia teodolitu i sygnału,
3) od znaku i wielkości przewyższenia i od wysokości ustawienia teodolitu i sygnału,
4) od wibracji.
40. Dokładność różnicy wysokości wyznaczanej metodą niwelacji
trygonometrycznej przy krótkich celowych zależy od:
1) dokładności wyznaczenia współczynnika refrakcji,
2) błędów pomiaru kąta pionowego i odległości,
3) błędu wyznaczenia promienia krzywizny Ziemi,
4) warunków terenowych.
41. Kompensatory w instrumentach geodezyjnych służą do:
1) wyznaczania błędu indeksu,
2) eliminacji grubych błędów,
3) wyznaczenia i stabilizacji kierunku pionu lub poziomu,
4) pomiaru odległości.
42. Tachimetria elektroniczna może być stosowana przy opracowywaniu
mapy:
1) tylko zasadniczej sytuacyjnej,
2) wysokościowej,
3) zasadniczej sytuacyjnej i wysokościowej,
4) żadnej.
43.
Szczegóły sytuacyjne przy opracowywaniu
graficznym
wyników
pomiarów tachimetrycznych wykonywanych tachimetrem elektronicznym
nanosi się na mapę na podstawie:
45
®®

1) współrzędnych biegunowych,
2) współrzędnych prostokątnych,
3) długości,
4) kątów poziomych.
44. Podstawę podziału na arkusze w Międzynarodowej Mapie Świata
stanowi:
arkusz mapy w skali 1 : 1 000 000
45. Sytuacja na mapach topograficznych przedstawiona jest za pomocą
tylko:
1) rzutów ortogonalnych,
2) znaków topograficznych,
3) objaśnień,
4) rzutów ortogonalnych, znaków topograficznych, objaśnień.
46. Układ państwowy „1992”został wprowadzony do sporządzania map:
47. Obecnie mapy dla celów gospodarczych opracowuje się w
odwzorowaniu:
1) Gaussa - Krügera,
2) azymutalnym,
3) konforemnym,
4) żadnym z wymienionych.
48. Odwzorowanie Gaussa-Krügera jest:
wiernokątne, walcowe, poprzeczne
49. Zestaw liczb 829.346 może być w warunkach Polski godłem arkusza
mapy:
1) w skali 1 : 25 000,
2) w skali 1 : 10 000,
3) w żadnej z tych skal,
4) w innej skali.
50. W układzie państwowym „1992” godło w postaci M-34-108-A-a
oznacza mapę topograficzną:
46
®®

GEODEZJA WYŻSZA, SATELITARNA I ASTRONOMIA GEODEZYJNA
1. Kształt i rozmiary elipsoidy obrotowej jednoznacznie określa następujący zbiór
parametrów.
a, b
a,b lub a,f lub a,e^2
a, b, f (a i b określają rozmiar, natomiast kształt elipsoidy określa się za pomocą
parametru zwanego spłaszczeniem elipsoidy czyli f)
f=(a-b)/a - więc jest parametrem pośrednim
- racja ;)
2. Różnica między półosią dużą a półosią małą elipsoidy aproksymujcej powierzchnię
Ziemi wynosi w przybliżeniu:
21km
3. Półoś duża elipsoidy ziemskiej wynosi w przybliżeniu:
6378km
4. Przez trójkąt geodezyjny rozumiemy trójkąt:
na elipsoidzie obrotowej
, utworzony przez trzy łuki linii geodezyjnej. Rozwiązanie
trójkąta geodezyjnego polega na wyznaczeniu wszystkich jego boków i kątów na
podstawie 3 znanych elementów. Przy rozwiązywaniu małych trójkątów geodezyjnych
(długości boków do 90km) posługujemy się metodą Lagrender’a (boki pozostają te same)
lub metoda additamentów (kąty pozostają takie same).
trójkąt sferyczny- na sferze
trójkąt eulerowski -trójkąt sferyczny, powstały z 3 łuków wielkich na sferze
przecinających się parami
5. Bokami trójkąta geodezyjnego są:
linie geodezyjne
=ortodromy
6. Przez nadmiar sferyczny rozumiemy:
rożnica pomiędzy sumą kątów w trójkącie sferycznym a trójkącie płaskim
wartość różnicy między sumą kątów trójkąta sferycznego a odpowiadającą mu sumą
kątów trójkąta płaskiego
7. We wzorach trygonometrii sferycznej długość boków w trójkątach sfertcznych wyraża
się:
miarą kątową
8. Doba gwiazdowa:
47
®®
jest krótsza od doby słonecznej o 3min 56sek.
doba gwiazdowa =23h56m04s
doba słoneczna =23h56m04s+3m56s
Doba gwiazdowa to okres pomiędzy dwoma górowaniami gwiazdy
Doba słoneczna to okres pomiędzy dwoma górowaniami słońca
9. Które ze współrzędnych gwiazdy: t – kąt godzinny i z – odległość zenitalna, są
prawdziwe dla zjawiska wschodu gwiazdy:
wschód gwiazdy: z=90 (h=0)
t = <12,24h>
zachód gwiazdy z=90 (h =0) t= <0h,12h>
10. Gwiazda przechodząc przez I wertykał po stronie wschodniej ma azymut geodezyjny
równy:
90 stopni
a nie 270? jak był egzamin z wyższej to własnie też były wątpliwości
co do tego pytania. Ogarnęliście to czy przepisaliście od starszych roczników?
-
zielona ,czcionka czyli zgapione z zeszlego roku..
Azymut astronomiczny jest równy 270, a pytanie jest o geodezyjny, który równy jest 90
potwierdzam astronomiczny 270 geodezyjny 90 mam tak w notatkach
Ma ktoś jeszcze wątpliwości? (jest to rzut
płaszczyzny horyzontu, z góry) czerwona linia - rzut I wertykału, niebieska - południka
miejscowego - na chłopski rozum. Azymut na zielono jest ofc geodezyjny.
I wertykał to wertykał, którego płaszczyzna jest prostopadła do południka miejscowego
Tak, czyli przechodzi przez zachód i wschód.
11. W astronomii zjawisko precesji związane jest z:
okresowym chwianiem się osi obrotu Ziemi wywołanym przez Księżyc
12. Równanie czasu w astronomii określa różnicę między czasami:
Średnim czasem słonecznym a prawdziwym czasem słonecznym
ja mysle ze miedzy słonecznym prawdziwym a średnim
http://vesta.astro.amu.edu.pl/Staff/Iwona/geograf.pdf
Różnica pomiędzy czasem słonecznym prawdziwym, a czasem słonecznym średnim.
(według notatek z wykładu)
48
®®

a mnie się wydaje, że to będzie między słonecznym prawdziwym i średnim
Równanie czasu: E=Tv-Tm, Tv- czas słoneczny prawdziwy, Tm- czas słoneczny średni ( z
notatek)
pl.wikipedia.org/wiki/czas_słoneczny
podbijam do pytania: dla mnie to roznica cz. slon. sr. a cz. slon. prawd.
13. Lokalny czas gwiazdowy równy jest:
rektascensji gwiazdy w momencie jej górowania
14. Jaką wartość przyjmuje czas gwiazdowy w momencie górowania gwiazdy:
s=a
Kulminacja górna: t = 0h -> Q= alfa
Kulminacja dolna: t=12h -> Q=alfa + 12h
Q - czas gwiazdowy
alfa - rektascencja
15. Jaką wartość przyjmuje azymut astronomiczny w momencie kulminacji gwiazdy,
jeśli zjawisko to zachodzi 1 biegunem a zenitem:
A=180 stopni
dlaczego? jak to wyjaśnić?
narysować sobie wędrówkę gwiazdy
Kulminacja gwiazdy występuje zawsze w czasie przejścia przez południk miejscowy
istnieją więc dwie opcje, albo azymut będzie 0 stopni albo 180. W tym przypadku
jest powiedziane że kulminacja zachodzi między biegunem a zenitem więc po stronie
północnej sfery dlatego azymut astronomiczny (mierzony od południowej części
południka miejscowego zgodnie z ruchem wskazówek zegara) wynosi 180
16. Równanie Clairauta linii geodezyjnej ma postać:
Ncos(fi)sin(alfa)=c
17. Zadanie geodezyjne wprost dotyczy:
obliczenia współrzędnych geodezyjnych punktu P2 i azymutu odwrotnego A21 linii
geod. na podstawie współrzędnych geod. punktu P1, długości linii geod. s12 oraz
azymutu A12
18. Zadanie geodezyjne odwrotne dotyczy:
obliczenia długości linii geod. s12 łączącej na powierzchni elipsoidy 2 punkty o znanych
współrzędnych geod. oraz obliczenia azymutów linii geod. wprost i odwrotnego (A12,
A21)
19. Długość równoleżnika elipsoidy obrotowej wyraża się za pomocą wzoru:
2PI N cos(fi)
20. Przybliżona wartość spłaszczenia elipsoidy ziemskiej wyraża się liczbą:
1:300
49
®®

21. Wartości głównych promieni krzywizny przekroju normalnego elipsoidy obrotowej
są:
równe na biegunie
22. Maksymalną wartość przyspieszenie siły ciężkości na poziomie morza osiąga na:
biegunach
23. Dwie różne powierzchnie ekwipotencjalne w pobliżu Ziemi:
oddalają się od siebie w miarę poruszania się od bieguna do równika
24. Linia pionu w pobliżu powierzchni Ziemi przechodząca przez dwie różne
powierzchnie ekwipotencjalne jest:
odcinkiem krzywej wypukłością zwróconą w kierunku równika
25. Przez undulację geoidy rozumiemy:
odstęp geoidy od elipsoidy odniesienia
26. Redukcja wolnopowietrzna (Faye’a) jest to redukcja grawimetryczna:
uwzględniająca tylko wpływ wysokości stanowiska pomiarowego ponad geoidą
Redukcja Bougera -uwzględniająca wpływ przyciągania mas ziemnych znajdujących się
ponad geoidą
Redukcja topograficzna -uwzględniająca wpływ topografii terenu wokół stanowiska
27. Wysokość normalną w systemie Mołodeńskiego określa odległość:
elipsoidy ekwipotencjalnej od telluroidy
28. Jeśli w danym kierunku A-B odchylenie linii pionu wynosi $ 10” $ to różnica
przewyższenia pomierzonego niewelatorem i techniką GPS między reperami A i B
oddalonymi o 1 km wyniesie:
ok. 5 cm
jaki jest na to wzór czy zależność?
(10’’/ro’’)*1000m
teta=-dN/s
Na podstawie rysunku z wykładu: dH = S * sin(teta)
jak dla mnie wzór: (delta dzeta)=fi*s /rho” = 10”*1000m/rho”, czyli potwierdzam
czerwonego wyżej
29. Po spoziomowaniu teodolitu jego oś pionowa wyznacza:
zenit astronomiczny
30. Aktualnie obowiązująca w Polsce elipsoida GRS’80 jako elipsoida odniesienia:
jest elipsoidą globalną (ziemską)
31. Anomalia wysokości ζ określa w systemie Mołodeńskiego:
odstęp quasi-geoidy od elipsoidy
32. Wysokość ortometryczna jest to odległość:
punktu na fizycznej powierzchni Ziemi od geoidy zmierzona wzdłuż linii pionu
50
®®
33. Aktualnie w Polsce obowiązuje system wysokości:
normalnych
34. Jakiej wielkości jednostką jest Gal:
przyspieszenia
35. Podstawowe równanie geodezji fizycznej dotyczy wyznaczenia:
odstępów geoidy od elipsoidy odniesienia
36. Altimetria satelitarna służy do:
wyznaczania średniego poziomu mórz i oceanów
37. Pomiary interferometryczne bardzo długich baz (VLBI) wykorzystują sygnały
radiowe emitowane przez:
quasary
Na pewno? Część źródeł internetowych sugeruje pulsary...
Kwazary - na pewno - wysyłają promieniowanie, gdyż bardzo szybko wirują (tak to
tłumaczył Kudrys)
38. Okres obiegu wokół Ziemi satelitów GPS wynosi:
pół doby gwiazdowej
A NIE 1 CAŁA DOBA GWIAZDOWA ???
z wikipedii “Obieg Ziemi
przez satelitę trwa 11h 58min (pół doby gwiazdowej).” chodzi o satelitę systemu GPS-
NAVSTAR. Tylko satelity geostacjonarne obiegają Ziemie w całą dobę gwiazdową
39. Jeśli w trakcie jednej sesji pomiarowej wykorzystuje się równocześnie 7
odbiorników GPS umieszczonych na siedmiu punktach, to równocześnie wyznacza się:
21 wektorów
½*n*(n-1)
40. Czym charakteryzują się sygnały radiowe L1 emitowane przez nadajniki GPS:
wszystkie satelity emitują sygnały o takiej samej długości fali L1
L1=0.19 m
L2 = 0.24 m
Dla uzupełnienia: w jednocześnie używanym konkurencyjnym systemie GLONASS każdy
satelita emituje sygnał o innej długości fali.
41. Obserwowane w pomiarach sygnału GPS zjawisko utraty cykli fazowych (cycle slips)
najczęściej związane jest z:
wynikiem chwilowej utraty łączności między odbiornikiem a satelitą
42. W pracach geodezyjnych wykorzystujących technologię GPS znalazły powszechne
zastosowanie:
podwójne różnicowe obserwacje fazy
43. Poprzez sieć POLREF rozumiemy:
precyzyjną sieć geodezyjną pierwszego rzędu utworzoną na terytorium Polski na
podstawie pomiarów GPS
51
®®

44. Pomiary GPS umożliwiają integrację:
praktycznie wszystkich klasycznych pomiarów geodezyjnych
45. Zgodnie z zasadą dynamiki i prawem powszechnego ciążenia ruch satelity może
odbywać się po:
hiperboli
koło, elipsa, parabola
46. III prawo Keplera mówi, że:
okres obiegu satelity zależy od rozmiaru orbity
II prawo Kepplera -prędkość polowa satelity r=p/(1+ecosteta)
Stosunek kwadratu okresu obiegu planety wokół Słońca do sześcianu wielkiej półosi jej
orbity (czyli średniej odległości od Słońca) jest stały
47. Ruch perturbowany spowodowany jest:
ciśnieniem światła słonecznego
czynniki niegrawitacyjne: opór atmosfery, siły elektromagnetyczne, efekty
relatywsityczne, meteoryty, pył kosmiczny
48. Sygnał radiowy w troposferze:
jest opóźniany
49. Położenie środka fazowego anteny do odbioru radiowych sygnałów satelitarnych:
zależy od wysokości horyzontalnej i azymutu satelity
a nie tylko od wys horyzontalnej?
od azymutu też zależy (nie ma stałego środka
fazowego bo zależy on właśnie od kierunku padania sygnału) ; ok:)
50. Serwis POZGEO-D systemu ASG-EUPOS pozwala na:
pobieranie danych obserwacyjnych ze stacji wirtualnych
52
®®

KARTOGRAFIA
1. W odwzorowaniu regularnym obrazem krzywej jest:
krzywa
2. Siatka kartograficzna na mapie to obraz:
południków i równoleżników
3. Elementarna skala długości w dowolnym odwzorowaniu kartograficznym,
niebędącym wiernokątnym zależy od:
p
ołożenia punktu i azymutu
4. Zniekształcenia długości – Zm w danym odwzorowaniu kartograficznym, określa
zależność (elementarna skala długości – m):
Zm= m-1
5. Zniekształcenia pól – ZP w danym odwzorowaniu kartograficznym, określa zależność
(elementarna skala pola – p)
Zp= p-1
6. Odwzorowanie jest wiernopolowe, gdy skale zniekształceń długości mB i mL,
spełniają zależność:
mB * mL= 1
7. Odwzorowanie jest wiernokątne, gdy utworzony kąt Θ pomiędzy liniami
parametrycznymi siatki oraz skale zniekształceń długości mB i mL spełniają zależność:
mB = mL , Θ= 90stopni,
8. Kierunki główne w odwzorowaniu wyznaczają linie siatki o kącie Θ pomiędzy liniami,
wynoszącym:
Θ= 90stopni,
9. W którym odwzorowaniu kartograficznym nie ma kierunków głównych:
wiernokątnym
10. Elipsa zniekształceń przyjmuje postać okręgu, gdy odwzorowanie kartograficzne
jest:
wiernokątne
- na pewno???
(na pewno - w odw wiernokątnym elementarne skale w kierunku równolezniowym i
południkowym są sobie rowne - stąd okrąg jako elipsa zniekształceń)
11. Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowania
jest styczny do kuli na biegunie, nazywamy odwzorowaniem:
normalnym
53
®®

12. Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowania
jest styczny do kuli na równiku, nazywamy odwzorowaniem:
poprzecznym
13. Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowania
jest styczny do kuli w dowolnym jej punkcie (z wyjątkiem bieguna i równika), nazywamy:
odwzorowaniem ukośnym
14. Odwzorowanie kartograficzne, w którym obrazem południków są proste, a obrazem
równoleżników są okręgi współśrodkowe, nazywamy odwzorowaniem:
azymutalnym normalnym
15. Odwzorowanie kartograficzne, w którym obrazem południków są proste lub odcinki
równoległe względem siebie i prostopadłe do prostoliniowego obrazu równoleżnika,
nazywamy odwzorowaniem:
walcowym normalnym
16. Odwzorowanie kartograficzne, w którym obrazem równoleżników są łuki okręgów
współśrodkowych, a obrazem południków są odcinki lub półproste prostopadłe do
obrazów równoleżników, nazywamy odwzorowaniem:
stożkowym normalnym
17. Odwzorowanie azymutalne normalne kuli jest wiernokątne, gdy Θ = 90⁰ i jest
spełniona relacja:
m_lambda= m_sigma
( m_lambda - skala długości w kierunku równoleżnikowym,
m_sigma - skala długości w kierunku południkowym,
Θ- kąt pomiędzy kierunkami w obrazie)
18. Odwzorowanie azymutalne normalne kuli jest wiernoodległościowe w kierunku
równoleżnikowym, gdy m - dowolne i jest spełniona relacja:
m_lambda= 1
19. Odwzorowanie azymutalne normalne kuli jest wienopolowe, gdy:
m_lambda x m_sigma = 1
20. W odwzorowaniu Mercatora kulę odwzorowuje się na:
pobocznicę walca
21. Odwzorowanie Mercatora jest najczęściej stosowane w:
nawigacji morskiej
22. Odwzorowanie Gaussa-Krügera jest odwzorowaniem:
elipsoidy na “walec”
- elipsoidy na płaszczyznę (imo)
Równokątne walcowe poprzeczne odwzorowanie powierzchni elipsoidy obrotowej na
płaszczyznę, nie na walec!! Czy tak?
skoro piszesz że to odwzorowanie jest walcowe to
jak może być na płaszczyznę ?
No na płaszczyznę walca
54
®®
treść pytania 34. Państwowy układ współrzędnych geodezyjnych „1992” jest
odwzorowaniem elipsoidy na walec poprzeczny(...) a układ 1992 jest w odwzorowaniu
G-K.
Może nie do końca umiem naukowo obronić moich wcześniejszych uwag, ale przytoczę
treść wykładu Kozioła [Wyklad_III_V, str. 38] o odwz. GK: Odwzorowanie Gaussa-
Krugera jest to wiernokątne, poprzeczne walcowe odwzorowanie elipsoidy obrotowej
na płaszczyznę, realizowane w wąskich pasach południkowych.
Więc jakie w końcu?
elipsoidy na płaszczyznę, którą to płaszczyzną jest pobocznica walca
czyli w naszym przypadku jaką odp mamy zaznaczyć?
Elipsoidy na pobocznice walca czyli chyba tzw“walec” ktory jest rowijany do
płaszczyzny i w pytaniu 33 bedzie wtedy walec
to w pytaniu 33 też ma byc plaszczyzna a nie walec?
- Wydaje mi się, że w tych pytaniach o odwzorowanie i zasadniczo różnych
odpowiedziach chodzi raz o to, czym jest to odwzorowanie, a raz w jaki sposób się je
uzyskuje
Wydaje mi się że merytorycznie na 99% walec.
- na 101% na płaszczyznę - metoda
rozwinięcia walcowego to sposób odwzorowania elipsoidy na płaszczyznę.
Walec jest tylko płaszczyzną rzutowania dla elipsoidy.
Nawet wikipedia mówi że
walec: “Odwzorowanie Gaussa-Krügera – odwzorowanie kartograficzne pasów
południkowych na pobocznicę walca”, a pobocznica walca dopóki sie jej nie rozwinie
niczym srajtasmy plaszczyzna nie jest!
Widzę, że trzeba chyba spytać dra KK...
PS: popatrzcie jak z pytań 22,23,24 ładnie układałaby się cała definicja - odwzorowanie
GK to wiernokątne (24), walcowe poprzeczne (23) elipsoidy na płaszczyznę (22) ;) tak
też chyba składany jest ten test.
Jakby było na płaszczyznę to by było azymutalne a nie walcowe.
odwzorowanie jakie? walcowe. Na co? na płaszczyzne aka pobocznice walca..
może tak?
Dowiedziałem się od roku wyżej, że oni mieli to pytanie i zaznaczyli odp b (elips na pł) i
właśnie to było źle rozkminione, dlatego może to jets jednak ten walec ?
23. Odwzorowanie Gaussa-Krügera jest odwzorowaniem:
walcowym poprzecznym
24. Odwzorowanie Gaussa-Krügera jest odwzorowaniem:
wiernokątnym
25. Wartość skali długości w południkach osiowych – m0, odwzorowania Gaussa-
Krügera, wynosi:
m0=1
26. Pasy południkowe odwzorowania Gaussa-Krügera dla opracowań kartograficznych
w dużych skalach wynoszą:
3 stopnie
55
®®
27. Pasy południkowe odwzorowania Gaussa-Krügera dla opracowań kartograficznych
w średnich skalach wynoszą:
6 stopni
28. Dla czterech stref, w układzie współrzędnych prostokątnych płaskich „1965”,
zastosowano odwzorowanie elipsoidy, na:
płaszczyznę sieczną
również za wikipedia:
‘Każda strefa została oddzielnie odwzorowana w płaszczyznę. Dla stref: I, II, III i IV zastosowano
odwzorowanie quasi-stereograficzne, natomiast dla strefy V odwzorowanie Gaussa-Krügera.
Uzyskano małe wartości zniekształceń ze względu na niewielkie rozmiary stref. W strefach 1–
4, rzutowania dokonano na płaszczyzny sieczne, dlatego też zniekształcenia odwzorowawcze
rozkładają się koncentrycznie do punktów głównych tych stref. W strefie V bez zniekształceń
odwzorowują się dwie linie.’
ODP Właściwa: PŁASZCZYZNA SIECZNA
jakby ktoś miał wątpliwości odnośnie wikipedii daję inne linki:
http://www.wodgik.rzeszow.pl/odwzorowania.shtml
http://www.uklady.walery.com.pl/index.php/odwzorowanie-quasi-stereograficzne-wig
29. Z ilu stref składa się układ współrzędnych prostokątnych płaskich „1965”:
5
30. W układzie współrzędnych prostokątnych płaskich „1965”, dla czterech stref
zastosowane odwzorowanie:
quasi-stereograficzne (Roussilhe'a)
31. Jakie odwzorowanie zastosowano do wyznaczania układu współrzędnych „GUGiK –
80”:
zmodyfikowane quasi-stereograficzne
32. Państwowy układ współrzędnych geodezyjnych „1992” jest określony z użyciem
odwzorowania:
Gaussa-Krügera
33. Państwowy układ współrzędnych geodezyjnych „1992” jest odwzorowaniem
elipsoidy na:
walec poprzeczny sieczny
34. Państwowy układ współrzędnych geodezyjnych „1992” jest odwzorowaniem
elipsoidy na walec poprzeczny sieczny pasie o szerokości:
NA PEWNO 10 STOPNI!!! - potwierdzone u KOZIOŁA
- wikipedia też potwierdza ;p
a asg mowi ze 12
35. UTM jest układem współrzędnych prostokątnych płaskich, w odwzorowaniu:
poprzecznym Mercatora
36. Międzynarodowa mapa świata jest w skali:
1: 1 000 000
37. Mapa to zmniejszony obraz ciała niebieskiego na:
56
®®
płaszczyźnie
38. Elementem osnowy matematycznej mapy jest:
skala
39. Elementami osnowy matematycznej mapy są:
skala i podziałka
40. Mapy ogólnogeograficzne, to:
mapy topograficzne
41. Która z wymienionych map jest mapą tematyczną:
mapa hydrogaficzna
42. W Polsce, mapy wielkoskalowe należą do przedziału skalowego:
1:500 - 1: 5000
43. Z ilu warstw informatycznych składa się mapa cyfrowa:
dowolnej skończonej liczby
44. Cyfrowa generalizacja kartograficzna zależy:
tylko od zmiany skali (
POTWIERDZONE U KOZIOŁA)
(str 15)
45 Prawo Töpfera – Pillewi zera stosowane w generalizacji kartograficznej
wykorzystywane jest do:
NA PEWNO ELIMINACJI OBIEKTÓW!!! - potwierdzone u KOZIOŁA
46. Do upraszczania kształtu obiektów generalizowanych stosujemy algorytmy
globalne:
Douglasa
47. Do metod jakościowych przedstawień kartograficznych zalicza się metodę:
sygnaturową
48. Do metod ilościowych przedstawień kartograficznych zalicza się metodę:
kartodiagramów
49. Aktualizację ciągłą stosuje się na mapie:
zasadniczej
50. Aktualizację okresową stosuje się na mapie:
topograficznej
57
®®

51. Reprodukcja map to proces ich:
odtwarzanie (jest to synonim słowa reprodukcja)
52. W procesie reprodukcji metodą kserograficzną wykorzystuje się
selen
KATASTER I GOSPODARKA NIERUCHOMOŚCIAMI
1. W ewidencji gruntów rejestruje się:
>>a) wartość działki ewidencyjnej i datę jej określenia
b) wartość hipoteki i datę jej określenia
c) przeznaczenie działki ewidencyjnej
d) współrzędne środka ciężkości działki ewidencyjnej
2. Do atrybutów działki ewidencyjnej nie należy:
a) powierzchnia użytków
b) numer rejonu statystycznego
>>c) oznaczenie przeznaczenia gruntów w planie miejscowym
d) numer rejestru zabytków
3. Do atrybutów budynku nie należy:
a) Numer porządkowy budynku
>>b) Kąt pochylenia połaci dachowych
c) Liczba kondygnacji podziemnych
d) Rok zakończenia budowy
4. Do atrybutów lokalu nie należy:
a) Powierzchnia pomieszczeń przynależnych
>>b) Powierzchnia pomieszczeń pomocniczych
c) Powierzchnia użytkowa lokalu
d) Liczba izb wchodzących w skład lokalu
5. Ewidencję gruntów i budynków prowadzi:
a) Wójt gminy jeżeli zawarł umowę z wojewoda w zakresie prowadzenia ewidencji
gruntow na obszarze gminy
>>b) Starosta powiatu
c) Wojewoda
d) Marszalek województwa
6. Operat ewidencyjny składa się z:
a) części opisowej i części kartograficznej
b) części opisowo-kartograficznej i części prawnej
c) części opisowej i części geodezyjnej
58
®®
>>d) części opisowo-kartograficznej i części geodezyjno-prawnej
7. Zasada rękojmi wiary publicznej ksiąg wieczystych:
a) nie dotyczy praw rzeczowych
>>b) nie dotyczy oznaczenia nieruchomości
c) dotyczy wartości nieruchomości
d) dotyczy hipoteki
Moim zdaniem d) gdyż jest to jeden z działów ksiąg wieczystych... Jedyne wyłączenia to
art. 7 ustawy o KW i hipotece. Innymi słowy rękojmia dotyczy wszystkich działów łącznie z
hipoteką. Potwierdzi ktoś?
uzasadnienie odp b (źródło: http://uniwest.eu/art/o-stanie-prawnym-nieruchomosci-
decyduje-tresc-ksiegi-wieczystej/29)
Ponadto rękojmia wiary publicznej ksiąg wieczystych nie rozciąga się na wpisy dokonane
w dziale I-O (oznaczenie nieruchomości) księgi wieczystej.
Przykładowo, wpis dotyczący
powierzchni gruntu nie rozstrzyga o tym, że nabywana działka ma taką powierzchnię, jaka
była ujawniona w księdze.
Dobra, powiedzmy, ze jest to jakieś źródło (aczkolwiek wolałabym przepis prawny), ale
w takim razie skąd wiesz, że zasada NIE DOTYCZY hipoteki? Bo z tego wyłazi, że obie
odpowiedzi są dobre tak jakby.
Nie wiem czy to wystarczy aby rozwiać wątpliwosci ale znalazłem cos takiego
(
http://e-prawnik.pl/porady-prawne/prawo-cywilne-1/rekojmia-publicznej-wiary-ksiag-
) - z tego wynika, że nie zawsze (jesli wogole) hipoteka jest chroniona
przez rekojmie (o ile dobrze zrozumiałem)
8.Nieruchomość gruntowa to:
>>a) część powierzchni ziemskiej stanowiąca przedmiot odrębnej własności
b) ciągła część powierzchni ziemskiej otoczona gruntami stanowiącymi przedmiot
odrębnego władania
c) ciągła część powierzchni ziemskiej jednolita pod względem prawnym
d) część powierzchni ziemskiej jednolita ze względu na władanie
9. Według obowiązujących przepisów jednostką rejestrową gruntów są:
a) grunty położone w granicach jednostki ewidencyjnej
b) grunty stanowiące obręb
>>c) działki w granicach obrębu tworzące jedną nieruchomość
d) działki w granicach obrębu jednolite pod względem władania
10. Do gruntów rolnych nie należą:
a) grunty orne oznaczone literą R
b) rowy oznaczone literą W
c) grunty pod stawami oznaczone literami Wsr
>>d) grunty zadrzewione i zakrzewione oznaczone literami Lz
59
®®
11. Oznaczenie użytku „Ti” oznacza:
a) tereny przeznaczone pod infrastrukturę przemysłową
>>b) tereny komunikacyjne inne
c) tereny inne
d) nie ma takiego użytku
12. Która z poniższych klas nie jest klasą użytku łąki trwałe:
a) IV
b) VI
>>c) IIIb
d) II
13. Klasyfikacji gleboznawczej podlegają:
>>a) Lasy
b) Grunty pod wodami powierzchniowymi płynącymi
c) Tereny rekreacyjno-wypoczynkowe
d) Tereny różne
14. Oznaczenie użytku „B” oznacza:
>
>a) tereny mieszkaniowe
b) tereny budowlane
c) bory
d) tereny bagienne
15. W dziale II ksiąg wieczystych ujawnia się:
a) oznaczenie nieruchomości
>>b) prawa rzeczowe
wg mnie poprawną odpowiedzią jest C użytkowanie. Prawa
rzeczowe wpisuje się do III działu. Owszem, własność to też prawo rzeczowe, ale w
tym pytaniu raczej chodziło o użytkowanie w sensie UW, a to wpisuje się do II działu.
Pytanie nieścisłe. Proszę o odzew :)
c) użytkowanie
jestem za ta odp, ja tez
d) hipotekę
Odzew :P Ja myślę że skoro pisze użytkowanie to chodzi o użytkowanie jako ograniczone prawo
rzeczowe i je ujawnia się w dziale III. Poprawna jest prawa rzeczowe b, czyli własność użytkowanie
wieczyste ujawniane w dziale II
RE: Odzew: No ale jeżeli pytamy się konkretnie o II dział, to odpowiedzi a,b, i d są z defnicji
niepoprawne.W II dziale nie ujawnia się ani oznaczenia nieruchomości, ani praw rzeczowych ni hipoteki.
I z tej racji możemy rozważać tylko c, choć ta odpowiedź jest “nieco niefortunna”.
Taka definicja:Dla polskiego prawa rzeczowego charakterystyczne jest zamknięcie przez ustawodawcę
katalogu praw rzeczowych – tzw. zasada numerus clausus praw rzeczowych: własność, użytkowanie
wieczyste, użytkowanie, służebność, zastaw, hipoteka, spółdzielcze własnościowe prawo do lokalu. Czyli
wnisokując z tego lepsza odpoweć b bo bardziej obszerna a zawiera się w niej użytkowanie
Dział II KW zawiera następujące rubryki (sprawdziłam w systemie internetowym)
Rubryka 2.1. Wzmianki w dziale II
Rubryka 2.2. Właściciel
Podrubryka 2.2.1. udział
Podrubryka 2.2.2. Skarb Państwa
Podrubryka 2.2.3. Jednostka sam. Teryt. (zw. Międzygminny)
Podrubryka 2.2.4. Inna osoba pr lub jedn. Org. Niebędąca osobą prawną
60
®®
Podrubryka 2.2.5 Osoba fizyczna
Rubryka 2.3. Właściciel wyodrębnionego lokalu
Rubryka 2.4. Użytkownik wieczysty
Rubryka 2.5. Uprawniony
Rubryka 2.6 Podstawa nabycia
Rubryka 2.7. Dane o wniosku i chwili wpisu
Rubryka 2.8. Komentarz
WNIOSKI I PODSTAWY WPISÓW W KW
Podrubryka – Akt notarialny
Dane o wniosku
Chwila wpisu
Z tego by wynikało , że raczej nie chodzi o użytkowanie (trzeba pamietac ze użytkowanie
nie jest tożsame z UW)
16. W ewidencji gruntów i budynków ujawnia się wszystkie budynki:
a
) trwale związane z gruntem,
b) posiadające fundamenty i dach
>>c) wymagające pozwolenia na budowę lub zgłoszenia budowy,
ta poprawna
(komentarz niżej)
ok,pozamiatałeś/łaś :)
d) trwale związane z gruntem, wyodrębnione z otoczenia ścianami, posiadające
fundamenty i dach
Według rozp 01
odp C
§ 78. W ewidencji nie wykazuje się budynków, których budowa, w
świetle przepisów prawa budowlanego, nie wymaga pozwolenia lub zgłoszenia.
§ 79. W ewidencji nie wykazuje się lokali wyodrębnionych w budynkach, o których mowa w
§ 78.
17. Mapa ewidencyjna nie zawiera:
a) granic użytków,
b) nazw ulic
>>c) linii zabudowy
d) numerów dróg publicznych
18. Działka ewidencyjna o numerze 120 uległa podziałowi na dwie działki. Nowe działki
otrzymają numery:
a) 120a, 120b
b) 120-1, 120-2
c) 120, 121
>>d) 120/1, 120/2
19. Z odrębną własnością lokalu związane jest prawo:
>
>a) współwłasności w części gruntu, na którym jest budynek, w którym jest lokal
b) użytkowania wieczystego części wspólnych budynku, w którym jest lokal
c) trwałego zarządu pomieszczeniami przynależnymi do lokalu
d) żadne z powyższych
20. Rejestr gruntów jest:
a) raportem o wszystkich działkach ewidencyjnych w granicach jednostki ewidencyjnej
61
®®

>>b) raportem o wszystkich działkach ewidencyjnych w granicach obrębu, zebranych
według ich przynależności do poszczególnych jednostek rejestrowych
c) raportem o wszystkich działkach ewidencyjnych w granicach obrębu, zebranych
według numerów tych działek
d) raportem o wszystkich gruntach w granicach gminy
21. Rejestr budynków zawiera dane o:
a) wszystkich budynkach w granicach jednostki ewidencyjnej
b) wszystkich budynkach mieszkalnych w granicach obrębu
>>c) wszystkich budynkach stanowiących odrębne nieruchomości w granicach obrębu
d) wszystkich budynkach w granicach obrębu
22. Celem publicznym według ustawy o gospodarce nieruchomościami nie jest:
>>a) budowa i utrzymywanie prywatnych przedszkoli
b) budowa i utrzymywanie publicznych obiektów sportowych
c) budowa i utrzymywanie ciągów drenażowych
d) budowa i utrzymywanie pomieszczeń dla sądów
23. Użytkowanie wieczyste może być ustalone na okres:
a) co najmniej 30 lat
>>b) co najmniej 40 lat
c) nie więcej niż na 100 lat
d) dożywotnio
24. Ustawa o gospodarce nieruchomościami określa zasady:
a) gospodarowania nieruchomościami rolnymi stanowiącymi własność Skarbu Państwa
>>b) gospodarowania nieruchomościami stanowiącymi własność Skarbu Państwa oraz
własność jednostek samorządu terytorialnego
c) gospodarowania nieruchomościami rolnymi i leśnymi stanowiącymi własność Skarbu
Państwa
d) gospodarowania nieruchomościami innymi niż rolne i leśne stanowiącymi własność
Skarbu Państwa
25. Oddanie w użytkowanie wieczyste nieruchomości gruntowej wymaga:
a) umowy ustnej
b) decyzji administracyjnej
c) postanowienia wójta
>>d) umowy w formie aktu notarialnego
26. Do wniosku o podział nieruchomości w trybie ustawy o gospodarce
nieruchomościami dołączane jest między innymi:
a) szkic polowy z pomiaru granic zewnętrznych
b) obliczenie pól powierzchni nowych działek
>>c) wykaz zmian gruntowych
d) sprawozdanie techniczne
27. Opłata adiacencka to:
62
®®

>>a) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym
między innymi scaleniem i podziałem nieruchomości
b) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym jej
rozgraniczeniem
c) opłata ustalona w związku ze przekazaniem gruntów w użytkowanie wieczyste
d) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym
uchwaleniem planu miejscowego gminy
potwierdzenie odp (Za wikipedią)
Opłata adiacencka - opłata dotycząca właścicieli lub użytkowników wieczystych[1]
nieruchomości, których wartość wzrosła na skutek następujących zdarzeń:
●
●
scalenie i podział nieruchomości,
●
budowy urządzeń infrastruktury technicznej[2] z udziałem środków Skarbu Państwa
lub jednostek samorządu terytorialnego.
28. Wywłaszczenie jest możliwe:
a) na cele publiczne za odszkodowaniem ustalonym przez właściciela nieruchomości
wywłaszczanej
>>b) na cele publiczne za słusznym odszkodowaniem
c) za słusznym odszkodowaniem
d) gdy wymaga tego ważny interes społeczny
29. Wywłaszczoną nieruchomość uznaje się za zbędną na cel określony w decyzji o
wywłaszczeniu, jeżeli:
a) pomimo upływu 10 lat od dnia, w którym decyzja o wywłaszczeniu stała się
ostateczna, nie rozpoczęto prac związanych z realizacją tego celu
b) pomimo upływu 7 lat od dnia, w którym decyzja o wywłaszczeniu stała się
ostateczna, nie zakończono prac związanych z realizacją tego celu
>>c) pomimo upływu 7 lat od dnia, w którym decyzja o wywłaszczeniu stała się
ostateczna, nie rozpoczęto prac związanych z realizacją tego celu
d) pomimo upływu 5 lat od dnia, w którym decyzja o wywłaszczeniu stała się
ostateczna, nie rozpoczęto prac związanych z realizacją tego celu
30. Scalenie i podział nieruchomości jest możliwe jeżeli:
>>a) wystąpią o nie właściciele lub użytkownicy wieczyści ponad 50 % powierzchni
gruntów objętych scaleniem i podziałem
b) wyrazi na to zgodę wójt gminy
c) jest to zgodne z studium uwarunkowań i kierunków zagospodarowania
przestrzennego gminy
d) gdy wyrazi na to zgodę wojewoda
31. Działalność zawodową rzeczoznawcy majątkowego, pośrednika i zarządcy
nieruchomości reguluje:
a
) Ustawa Prawo Geodezyjne i Kartograficzne
b) Ustawa Prawo Budowlane
>>c) Ustawa o Gospodarce Nieruchomościami
d) Kodeks Cywilny
63
®®

32. Wartość rynkową stanowi:
a) koszt odtworzenia
>>b) prawdopodobna cena transakcyjna
c) koszt odtworzenia z uwzględnieniem zużycia
d) wartość katastralna
33. Wartość odtworzeniową stanowi:
a) koszt odtworzenia
b) cena transakcyjna
>>c) koszt odtworzenia z uwzględnieniem zużycia
d) wartość katastralna
34. Wartość katastralna to:
>>a) wartość wyznaczona w procesie powszechnej taksacji
b) wartość rynkowa
c) wartość indywidualna
d) wartość wyznaczona w podejściu kosztowym
35. Podejście porównawcze szacowania nieruchomości bazuje między innymi na:
>>a) cenach nieruchomości podobnych
b) czynszach nieruchomości podobnych
c) kosztach zastąpienia nieruchomości
d) dochodach z nieruchomości podobnych
36. Podejście dochodowe szacowania nieruchomości bazuje między innymi na:
a) cenach transakcyjnych i cechach cenotwórczych
b) kosztach robocizny i materiałów budowlanych
>>c) czynszach z tytułu najmu lub dzierżawy
d) zyskach ze sprzedaży materiałów porozbiórkowych
37. W podejściu kosztowym wyznaczamy:
a
) wartość rynkową
>>b) wartość odtworzeniową
c) wartość katastralną
d) wartość kosztową
38. Zużycie nieruchomości uwzględniamy wyznaczając wartość odtworzeniową:
a) tylko w metodzie porównywania parami
b) we wszystkich metodach podejścia dochodowego
>>c) we wszystkich metodach podejścia kosztowego
d) tylko w technice szczegółowej
39. Operat szacunkowy stanowi opinię o:
a) bezpieczeństwie użytkowania budynku
>>b) wartości nieruchomości
c) możliwym sposobie zagospodarowania
d) możliwości zabudowy gruntu
64
®®

40. Zawód rzeczoznawcy majątkowego może wykonywać:
a) każdy obywatel państwa
>>b) osoba posiadająca stosowną licencję
c) geodeta
d) notariusz
41. Do uzyskania licencji zawodowej rzeczoznawcy konieczne jest:
a) ukończenie studiów prawniczych
>>b) ukończenie praktyki zawodowej
c) posiadanie uprawnień geodezyjnych 1 i 2
d) 2 letnia działalność w zawodzie
42. Pośrednik w obrocie nieruchomościami to:
>>a) zawód regulowany ustawą o gospodarce nieruchomościami
b) zawód możliwy do wykonywania bez uprawnień
c) jedno z uprawnień geodety
d) aplikacja prawnicza
43. Umowa pośrednictwa może być zawarta w formie:
>>a) z wyłącznością lub bez niej
b) tylko jako umowa pośrednictwa otwarta
c) tylko z wyłącznością
d) wyłącznie w postaci aktu notarialnego
44. Umowa pośrednictwa otwarta:
a) nie pozwala na zawarcie innych umów pośrednictwa dotyczących tej samej
nieruchomości
>>b) pozwala na zawarcie innych umów pośrednictwa dotyczących tej samej
nieruchomości
c) nie pozwala na zawarcie umów pośrednictwa dotyczących innej nieruchomości
d) występuje wyłącznie w postaci aktu notarialnego
45. Umowa pośrednictwa z wyłącznością:
>>a) nie pozwala na sprzedaż nieruchomości przez innego pośrednika
b) pozwala na zawieranie dowolnej liczby umów z innymi pośrednikami
c) pozwala na zawarcie umowy z dodatkowym pośrednikiem
d) obliguje sprzedającego do reklamowania swojej oferty
46. Wykonywanie zawodu zarządcy nieruchomości wymaga:
>>a) posiadania licencji
b) pracy w spółdzielni mieszkaniowej
c) członkostwa w spółdzielni mieszkaniowej
d) bycia jednym ze współwłaścicieli zarządzanej nieruchomości
47. Przyjęcie spadku z dobrodziejstwem inwentarza:
a) zabezpiecza przed przejęciem zobowiązań zmarłego
>>b) wskazuje na odpowiedzialność tylko do wielkości spadku
65
®®

c) wskazuje na konieczność przejęcia zwierząt gospodarskich
d) odpowiada się całym majątkiem własnym i uzyskanym ze spadku
48. Proste przejęcie spadku powoduje, że za długi spadkodawcy:
>>a) odpowiada się całym majątkiem własnym i uzyskanym ze spadku
b) odpowiada się tylko majątkiem uzyskanym ze spadku
c) wyłącza odpowiedzialność za te długi
d) odpowiada się za 50% zobowiązań
49. Zachowek to:
>>a) należny najbliższym udział w masie spadkowej
b) rodzaj zabezpieczenia kredytu
c) część spadku przypadająca małżonkowi
d) 50% spadku
50. Testament może zostać napisany:
>>a) w postaci aktu notarialnego
b) tylko odręcznie
c) wspólnie z innymi osobami
d) tylko pismem maszynowym
66
®®

PRZEKSZTAŁCENIA I OCHRONA TERENÓW
1. Teren to:
Część skorupy ziemskiej mająca kontakt z atmosferą.
Wg definicji skorupa ziemska od dołu styka się z powierzchnią nieciągłości MOHO
(granicą między skorupą ziemską a górną warstwą płaszcza ziemskiego), a od góry z
atmosferą lub hydrosferą. Terenem nie jest więc dno morza, oceanu czy rzeki.
Nie za bardzo to rozumiem skoro styka się od góry z hydrosferą to czemu nie dno oceanu
właśnie?
Ja w notatkach nie mam wspomnianej hydrosfery skorupa ziemska od dołu styka się z
powierzchnią nieciągłości MOHO a od góry z atmosferą
Nie wiem nad czym się zastanawiacie skoro definicja terenu jest na drugim slajdzie
pierwszego wykładu z tego przedmiotu (sem IV)
2. Wskaźnik deformacji określany na podstawie wyników pomiarów z najmniejszą
dokładnością to:
krzywizna
mam tak zapisane w notatkach z zajęć, ale nie mam wyjaśnienia. Chodziło chyba o to,
że było tam najwięcej przekształceń (patrz wzory: używa się tam T, W i l). Ale może ktoś
ma lepszy pomysł?
tez uważam ze krzywizna
We wzorze na krzywizne jest T, W i l?? moglbys podac ten wzor?
Moim zdaniem odp to odksztalcenia poziome bo je sie liczy na podstawie nachylen a
nachylenia na podstawie obnizen wiec bledy sie kumuluja. (Mowa o wzorach na deformacje
m,aksymalne)
odkształcenia poziome to wlasnie odwrtonie sa na podstawie pomiarów z najwieksza
dokladnoscia
krzywizna jest drugą pochodną po obniżeniach
odkształcenia poziome też są drugą pochodną po oniżeniach:P
a co myślicie o tym, że Hejmanowi chodziło nie o dokł pomiarów, a o dokładność w
sensie ilość miejsc po przecinku w otrzymanym wyniku??
w notatkach mam taka tabelke:
dokładność
ilość miejsc po przec
nachylenia T, odkształcenia E
2
krzywizny K
4
obniżenia W
3
przem. poz. U
taka z jaką pomierzono
czyli nachylenia bądź odkształcenia ???
3. Do antropogenicznych przekształceń terenu zalicza się:
niecki obniżeniowe
antropogeniczne przekształcenia terenu – to wszelkie bodźce celowe lub nie,
wywoływane przez człowieka w środowisku naturalnym i powodujące jego reakcję (w
postaci zmian powierzchni terenu).
4. Przy wysalaniu kawern magazynowych występuje zjawisko:
konwergencji
67
®®

magazynuje się w nich podziemne magazyny paliw. Przy pracy zbiorników
magazynowych może występować dodatkowo dywergencja.
5. Do pokrycia terenu należą:
grunt, szata roślinna, zabudowa i infrastruktura
pokrycie terenu jest obserwowaną geo-bio-fizyczną pokrywą widzianą z powierzchni
ziemi lub poprzez zdalną rejestrację (np. z satelity), obejmującą roślinność (naturalną
i uprawną) oraz sztuczne konstrukcje (budynki, drogi, itd.), które przykrywają
powierzchnię ziemi.
6. Eksploracja to:
poszukiwania i badania złóż
eksploracja – szukać, badać, odkrywać (coś)
7. Geostatystyka służy do:
określania parametrów zmienności złóż surowców mineralnych
statyczne metody określania zmienności parametrów (np. złóż surowców mineralnych).
8. W złożach typu pokładowego spąg to określenie:
dolnej płaszczyzny oddzielającej pokład kopaliny od skał otaczających
czyli podłoga. Strop to sufit (część górna), ściany (część boczna) to ociosy. W środku
jest złoże kopaliny, czyli naturalne nagromadzenie kopaliny w skorupie ziemskiej, w
skutek naturalnych procesów geologicznych, w ilości opłacalnej do gospodarczego
wykorzystania. Jego grubość to miąższość. Kopalina to surowiec o znaczeniu
gospodarczym.
Złoża pokładowe to np. węgiel kamienny i brunatny.
dróg polnych
9. Ocenę zagrożenia obiektów liniowych wykonuje się w oparciu o wartości:
pozyskane z pomiaru linii obserwacyjnych.
linia pomiarowa
-linia prostopadła do krawędzi pola eksploatacyjnego,
-końce linii poza przewidywanym zasięgiem wpływów eksploatacji,
-równe odległości pomiędzy punktami pomiarowymi,
-częstotliwość pomiaru dostosowane do dynamiki zmian
W miastach wzdłuż ulic, na pasach zieleni; na terenach rolnych wzdłuż miedz,
ja mam napisane że dla obiektów linowych np. drogi najważniejsze są wartości osiadania
oraz odkształceń poziomych,
odkształcenia poziome potwierdzam
n
10. Maksymalne obniżenie powierzchni terenu nad eksploatacją głębinową w dnie
niecki obniżeniowej nie może być:
większe niż maksymalna grubość eksploatowanego złoża
bo Wmax=a*g. a<=1, więc nie można osiągnąć więcej niż g (miąższość®®) – patrz
pytanie 16.
11. Miąższość nadkładu trzecio- i czwartorzędowego:
jeśli brak, to należy liczyć się z deformacjami nieciągłymi
dlaczego taka odpowiedź tu?
To oznacza, że mamy do czynienia z płytką
eksploatacją, która sprzyja powstawaniu deformacji nieciągłych.
68
®®

12. Nawiązanie precyzyjnych pomiarów przemieszczeń na terenach górniczych lepiej
wykonać:
poza granicami pola przemieszczeń
czyli poza zasięgiem wpływów (patrz: warunki założenia linii pomiarowej w pytaniu 9)
13. Odkształcenie to:
zmiana położenia wzajemnego dwóch punktów tego samego ciała
14. Przemieszczenie poziome to:
wektor
przemieszczenie poziome (u)
Ui,i+1=li,i+1n-li,i+10
U2-3=l2-3n-l2-30+U1-2
15. Wskaźniki deformacji to:
obniżenia, nachylenia, krzywizny (w, T, K)
ogólnie wszystkie te wskaźniki, czyli powyższe i przesunięcie poziome (u), odkształcenie
poziome (ɛ).
16. Współczynnik „a” jest:
parametrem teorii wpływów eksploatacji odpowiadającym za sposób wypełnienia
pustki poeksploatacyjnej
a – współczynnik zależny od sposobu likwidacji wyrobisk.
0,8-0,95 Zawał, 0,5-0,6 słaba podsadzka, 0,1-0,3 dobra podsadzka.
a=Wmax/gśr=VW/VE
γzałamania – kąt załamania skał.
17. Rozeta pomiarowa jest konstrukcją stosowaną w pomiarach deformacji
powierzchni terenu celem:
wyznaczania pełnego rozkładu odkształceń poziomych w punkcie
rozety w formie gwiazdy lub delty lokuje się w pobliżu szczególnie chronionych obiektów
(np. zabytkowe kościoły, obiekty użyteczności publicznej)
18. Kąt rozproszenia wpływów eksploatacji w teorii Knothego „b” to
kąt zależny od właściwości wytrzymałościowych całego górotworu nad eksploatacją
to kąt zasięgu wpływów głównych tj. kąt wyznaczający zasięg wpływów do wartości
osiadań 0,61% wmax od krawędzi eksploatacji. tgβ=H/r=Wmax/Tmax.
im większy tgβ, tym mniejszy zasięg wpływów,
im mniejszy tgβ, tym większy zasięg wpływów.
Nie jestem pewny, ale czy Wmax/Tmax=r, a nie tgBeta?
19. Bez informacji o grubości eksploatowanego złoża:
nie ma możliwości wykonać prognozy wpływów eksploatacji
nie będzie niczego. Do obliczenie W potrzebujemy g (W=ag), nie obliczymy nawet
objętości. Do dalszych obliczeń używamy W.
20. Maksymalne obniżenie powierzchni terenu nad tzw. dużym polem eksploatacji
można obliczyć jako:
69
®®

Iloczyn współczynnika eksploatacji „a” i miąższości (grubości) złoża.
WMAX=a*g (miejsce występowania: xWmax<=-r) r-patametr rozproszenia wpływów
(promień zasięgu wpływów głównych)
21. Maksymalne, teoretyczne nachylenia profilu niecki obniżeniowej wystąpią:
nad krawędzią pola eksploatacji
Tmax=Wmax/r
xTmaz=0.
70
®®

SYSTEMY INFORMACJI O TERENIE
1. Jedną z cech mapy w postaci tradycyjnej jest:
a) pełnienie funkcji środka przechowywania informacji i środka prezentacji informacji
Wady mapy analogowej:
-straty informacji podczas kartowania,
- ograniczona pojemność rysunku mapy,
- straty informacji poprzez zmiany kartometryczne w czasie (skurcz mapy),
- zestawienia tematyczne ręczne,
- utrudniona aktualizacja (ręczna),
- problem przechowywania danych, trudne zabezpieczenie danych materialnych.
2. Jedną z podstawowych wad mapy w postaci tradycyjnej jest:
c)
zależność parametrów kartometrycznych obrazu mapy od temperatury i wilgotności
Wady mapy analogowej:
-straty informacji podczas kartowania,
- ograniczona pojemność rysunku mapy,
- straty informacji poprzez zmiany kartometryczne w czasie (skurcz mapy),
- zestawienia tematyczne ręczne,
- utrudniona aktualizacja (ręczna),
- problem przechowywania danych, trudne zabezpieczenie danych materialnych.
3. Stan przestrzeni realnej odwzorowywany w postaci mapy podlega redukcjom:
d)
redukcji przestrzeni, redukcji klas i redukcji kształtu
Trzy podstawowe redukcje umożliwiające włożenie realnego świata do komputera:
1) redukcja na lokalną płaszczyznę odniesienia (poziomą), świat dwuwymiarowy do
jednowymiarowego
2) redukcja kształtu , np. wyrażenie obiektów mających różne wymiary poprzez znaki
punktowe,
3) rozwarstwienie (punktowe, liniowe, powierzchniowe)
4. Dla zapisu realnej przestrzeni w postaci komputerowej:
b) niezbędna jest redukcja realnej przestrzeni trójwymiarowej do dwóch wymiarów, a
następnie doprowadzenie do postaci jednowymiarowej (do sekwencji znaków)
Aby włożyć realny świat do komputera należy dokonać redukcji na lokalną płaszczyznę
odniesienia czyli tak jak było przedstawione na rysuneczku z domkami, drzewkami i
rzeczką: 3D => 2D => 1:M
71
®®

72
®®

5. Wspólną cechą systemu informacji o terenie i systemu informacji geograficznej jest:
c) przynależność do klasy systemów informacji przestrzennej
Pozostałe odpowiedzi odpadają gdyż:
SIT – środowisko wielkoskalowe, a SIG – środowisko małoskalowe,
SIT – model wektorowy, a SIG – model rastrowy,
SIT – obiekty typu budynki, urządzenia podziemne, SIG - obiekty przyrodnicze, geograficzne,
SIT – wysoka dokładność, a SIG – dokładność niska ale wystarczająca.
SIG i SIT wchodzą w skład Systemu Informacji Przestrzennej (SIP), czyli są klasami tego
systemu.
6. Zgodnie z cybernetyczną interpretacją pojęcia „informacja", informację można określić
jako:
b) pojawienie się zdarzenia ze zbioru możliwych zdarzeń
Interpretacja informacji:
- tradycyjny, jednorazowy, semantyczny (wrażenia emocjonalne),
- sformalizowany, cybernetyczny, informacja jako zdarzenie ze zbioru,
- wg koncepcji C.E. Shannona informacja związana jest z prawdopodobieństwem ( z
eliminacją niepewności),
- funkcja entropii - entropia jest tym większa im więcej informacji otrzymujemy, jeżeli coś
jest pewne nie dostarcza żadnych informacji.
7. Tablica jako struktura danych:
a) jest uporządkowanym zbiorem elementów tego samego typu
Tablica – uporządkowany zbiór elementów tego samego typu, przeglądanie wierszowe albo
kolumnowe, przykład tablicy: macierze/krakowiany.
8. Rekord jako struktura danych:
c) jest zbiorem elementów, które mogą być różnych typów a kolejność tych elementów jest ustalona
Rekord – zbiór elementów różnych typów, element rekordu to pole, zbiór rekordów to plik. Pola
rekordu na rysuneczku były numerowane w kolejności co sugeruje uporządkowaną strukturę.
9. Stos jest strukturą danych o następujących cechach:
c) jest strukturą liniową, do której jest dostęp tylko z jednej strony
Stos – tablica liniowa, do której dostęp możliwy jest tylko z jednej strony. Stosem nazywamy
pulsującą macierz, z której można wydobyć ostatni element. Przykłady: układanie
pasjansa, stos kartek, piłeczki ping-pongowe w rurce, wózki w supermarkecie.
10. Drzewo jest strukturą:
73
®®

b) ustanawiającą hierarchię elementów
Drzewo – struktura ustanawiająca hierarchię, elementami są węzły, a każdy węzeł ma jeden
jedyny nadrzędny element i dowolną liczbę podrzędnych (np. struktura danych na dysku
– folder, plik ). Cechy struktury drzewa: bezkolizyjność.
11. Opracowanie bazy danych przestrzennych obejmuje następujące po sobie etapy:
modelowanie pojęciowe, modelowanie logiczne, modelowanie fizyczne, ladowanie
bazy danych, wdrożenie systemu
12. Podstawowe cechy modelu wektorowego prostego to:
prosta struktura zapisu oparta na liście wspólrzednych brak topologii redundancja
danych
Istotna kolejność zapisu współrzędnych. Musi być kompletna liczba par współrzędnych.
Przy obiekcie zamkniętym pierwsza para współrzędnych powtarza się na końcu.
Redundacja danych. Brak relacji między obiektami. Zmiana granicy jednej działki nie
powoduje zmiany granicy działki przyległej. Brak topologii. Obiekty (punktowe, liniowe,
powierzchniowe).
Model wektorowy prosty = Model obiektowy nietopologiczny
Model polega na wyróżnieniu obiektów i traktowanie ich jako niezależne jedanostki
obrazu mapy. Każdy obiekt jest kompletny pod względem geometrycznym (jest to cecha
pozytywna), kolejną zaletą jest łatwość zapisu.
Wady modelu:
- redundancja zapisu (każdy obiekt zapisywany niezależnie, czyli linie graniczne obiektów
powierzchniowych zapisywane dwukrotnie),
- niezależność opisu obiektów sąsiadujących (zmiana granicy jednego obiektu nie pociąga
równoczesnej zmiany granicy drugiego obiektu,
- brak środków do ustalenia relacji pomiędzy obiektami (trudne algorytmy geometrii
obliczeniowej).
Model wektorowy prosty stosowany jest jako forma przejściowa mapy numerycznej.
13. Typowym zastosowaniem modelu obiektowego nietopologicznego jest:
d) zastosowanie jedynie w zadaniach nie wymagających analiz przestrzennych
Patrz pytanie 12.
W tym modelu niemożliwe jest wykonywanie jakichkolwiek analiz uwzględniających relacje
pomiędzy obiektami.
14. Topologia obrazu mapy polega na:
d) wyróżnianiu elementów strukturalnych i obiektów w obrazie mapy i uwzględnieniu relacji
przestrzennych pomiędzy elementami i obiektami
74
®®

Topologia to określanie relacji, zależności w obrazie mapy z obiektami na wielu warstwach.
Topologia zajmuje się zapisem sąsiedztwa. W topologii rozważamy sąsiedztwo a nie geometrię!
Topologia: struktura => cegiełki => ułożenie cegiełek (topologia)
15. Topologiczny model elementarny uwzględnia:
d) budowanie obiektów wyłącznie z wektorów jednostkowych
ale czemu niby z
jednostkowych? wektory nie są jednakowej długości. wg mnie popor odp to b - … z
wektorów (pojedynczych odcinków)
według mnie również poprawną odpowiedzią jest b)
Cechy modelu topologicznego elementarnego:
-podstawową strukturą geometryczną jest wektor, który oparty jest na dwóch węzłach.
Wszystkie punkty są węzłami, nawet na styku dwóch/trzech/czterech itd. wektorów, istnieją
także węzły samotne/izolowane. W modelu pojawia się także struktura geometryczna
będąca nieskończoną przestrzenią.
- wektory ,
- granice obszarów zbudowane z zestawu wektorów nie są dublowane (zmiana granicy
jednego obszaru pociąga za sobą zmianę granicy drugiego obszaru, umożliwia to
zmniejszenie redundancji),
- niewielka redundancja (stykające się ze sobą wektory zapisywane są oddzielnie),
- model jest prosty, przejrzysty, jedyny model którego zdarzeniem elementarnym jest
wektor,
- zapis topologii umożliwia wykonywanie operacji na mapie np. rozpoznawanie otoczenia,
- topologia wiąże elementy strukturalne mapy.
16. Podstawową cechą łańcucha w modelu topologicznym jest to, że:
a) rozpoczyna się w węźle i kończy się w węźle
W modelu topologicznym łańcuchowym:
- węzły są tylko tam gdzie stykają 3 wektory, jeśli dwa wektory: pseudowęzeł,
- łańcuch wektorów zaczyna się w węźle i kończy w węźle,
- pomiędzy jednym węzłem a drugim istnieją punkty pośrednie, które nadają kształt
łańcuchowi,
- w obrazie warstwy powierzchniowej na całej rozciągłości łańcuch posiada niezmienny
obszar po lewej stronie i jeden niezmienny obszar po prawej stronie,
- łańcuch posiada kierunek i swoje oznaczenie,
- łańcuch nie może przechodzić przez węzeł (może przechodzić przez punkty pośrednie).
17. Jedną z cech łańcucha w modelu topologicznym jest własność, że łańcuch posiada zapis:
d) obszaru po lewej stronie i obszaru po prawej stronie
Model łańcuchowy:
- wyróżnia obiekty i rozwija je do postaci liniowej,
- zdarzeniem elementarnym są węzły i łańcuchy,
- występują związki topologiczne,
75
®®

- obiekty punktowe reprezentowane są przez punkty lub węzły izolowane,
-łańcuchy spełniają dwie funkcje: mogą być obiektami lub brzegiem obszarów,
-następuje integracja przestrzeni informacji,
-jest bardziej oszczędny niż model topologiczny elementarny (współrzędne występują tylko
jeden raz),
- w modelu występują dwie dezintegracje:
1) modele zbudowane są z elementów,
2) przestrzeń i informacja zapisywane w różnych tabelach.
A czy nie powinno być: obszaru tylko po prawej stronie?
Nie po prawej i po lewej poprawnie
jest
18. Dane geometryczne łańcucha w modelu topologicznym zapisane są w postaci:
a) listy współrzędnych węzła początkowego, punktów pośrednich i węzła końcowego
Skoro łańcuch składa się z węzła początkowego, punktów pośrednich i węzła końcowego to
zapis musi zawierać kompletną informację o współrzędnych węzłów i punktów.
19. Definiowanie obszaru w modelu topologicznym ogólnym polega na:
b) zestawieniu zbioru łańcuchów ograniczających ten obszar i tak skierowanych, żeby obszar
znajdował się po prawej stronie przy poruszaniu się wzdłuż granicy
Odpowiedź jest słuszna jeśli chodzi o model topologiczny łańcuchowy, w modelu
topologicznym elementarnym obszar będzie zdefiniowany uporządkowaną listą
wektorów tworzących obrys zewnętrzny obszaru.
20. Typową cechą modelu topologicznego jest:
c) możliwość wykonywania operacji na tak zapisanym obrazie mapy
Możliwość wykonywania operacji wydaje się być najistotniejsza
21. Model rastrowy oparty jest na:
a) rozkładzie obrazu na zbiór geometrycznych figur elementarnych
Model rastrowy jest to ziarniste postrzeganie przestrzeni i polega na arbitralnym podziale
obrazu na elementarne figury geometryczne, model nazywany jest mozaikowym. W
chwili, w której arbitralnie zostały zdefiniowane elementy, rzeczywistość można wyrazić
tylko przez nie, przedstawienie świata za pomocą takich elementów wiąże się z pewnymi
błędami – zniekształcenia zależą od wymiarów pól elementarnych.
22. Zwiększenie dokładności odwzorowania obrazu w modelu rastrowym:
c)
wymaga większego zapotrzebowania na pojemność pamięci i dłuższego czasu przesyłania
obrazu przez łącza telekomunikacyjne
Trzy zależności związane z modelem rastrowym:
76
®®

- dokładność odzwierciedlania rzeczywistości,
- zapotrzebowanie na pamięć,
- czas budowy obrazu.
23. Kalibracja mapy rastrowej to:
proces nadawania mapie georeferencji z jednoczesnym usunięciem zniekształceń
geometrycznych rastra
24. Pojęcie infrastruktury informacji przestrzennej obejmuje:
regulacje prawne technologie typu Gis, Interent, standaryzację zbiorów i usług,
interoperacyjność
bregulacje prawne, technologię typu GIS, Internet, standaryzację zbiorów i usług,
interoperacyjność
Pojęcie infrastruktury danych przestrzennych (ang. Spatial Data Infrastructure, SDI).
Pojęcie to ma szereg definicji. W jednej z nich infrastruktura danych przestrzennych
rozumiana jest jako „komputerowy system informacji służący do wprowadzania,
gromadzenia, przetwarzania oraz przedstawiania danych przestrzennych, którego
podstawową funkcja jest wspomaganie decyzji”. W myśl innej definicji jest to zespół
odpowiednich technologii, środków politycznych i ekonomicznych oraz przedsięwzięć
instytucjonalnych, które ułatwiają dostęp i korzystanie z danych przestrzennych. Ta
ostatnia definicja umieszcza technologię jako jeden z elementów infrastruktury, obok
innych, nie mniej ważnych elementów.
Infrastrukturę danych przestrzennych można także pojmować jako narodowy zasób
informacji przestrzennej oraz środków zapewniających dostęp i wyszukiwanie tej
informacji. Innym, często pojawiającym się objaśnieniem znaczenia tego terminu jest
równanie, które stawia infrastrukturę danych przestrzennych jako sumę GISowych baz
danych, formalnych porozumień oraz technologii, pozwalających na dostęp do danych,
ich wyszukiwanie i prezentację. Technologie te rozwinęły się wraz z Internetem, i są
nadal rozwijane zgodnie z ogólnie przyjętymi standardami pozwalającymi na osiągnięcie
interoperacyjności.
SDI = GIS + Internet + Standardy + Interoperacyjność + Porozumienia
źródło: http://www.geoportal.gov.pl/index.php?
option=com_content&view=article&id=6&Itemid=19
25. Tablica zbioru globalnego ma wymiary:
a) tyle kolumn ile występuje w obrazie klas obiektów (atrybutów) i tyle wierszy ile obraz zawiera
pikseli
Zbiór globalny:
-ma strukturę tablicy,
-wiersze są pikselami, a kolumny atrybutami,
-każdy element tablicy przyjmuje pewną wartość ze zbioru (zbiór binarny, istnienie bądź nieistnienie),
-zbiór binarny ma ogromną ilość zer,
77
®®

- zbiór bardzo nieoszczędny,
- każde szukanie łączy się z selekcją tablicy, która wymaga czasu,
- zapis obrazu jest kompletny, ponieważ posiada zbiór wszystkich pikseli oraz pozycję atrybutów,
26. Jedną z cech zbioru globalnego jest:
c) uniwersalność i kompletność zapisu
- zapis obrazu jest kompletny, ponieważ posiada zbiór wszystkich pikseli oraz pozycję
atrybutów,
27. Jedną z zalet hierarchicznej bazy danych jest:
b) prosta struktura i mała liczba relacji w węzłach
Baza danych hierarchiczna:
- ma strukturę drzewa,
- w każdym węźle relacja 1:n,
- przejrzysta, prosta struktura, na ogół mała liczba relacji,
- wszystkie przebiegi muszą się odbywać zgodnie ze strukturą drzewa,
- szybkie przebiegi,
- odporność na modyfikację,
- olbrzymia nadmiarowość.
28. Sieciowa baza danych jest:
b) rozszerzeniem bazy hierarchicznej, likwidującym powtórzenia
Sieciowa baza danych:
- wygląda jak hierarchiczna, ale występuje więcej połączeń na poziomach relacji,
- usuwa wadę powtórzenia kosztem komplikacji struktury,
- bardziej oszczędna w stosunku do bazy hierarchicznej
29. Podstawową wadą hierarchicznej i sieciowej bazy danych jest to, że:
a) posiadają strukturę ustaloną w fazie projektu a modyfikacja tej struktury jest trudna
Zaletą hierarchicznej bazy danych jest prosta struktura, a sieciowej oszczędność.
Generalną wadą obydwu jest trudna modyfikacja.
30. Krotka (n-tka) w tablicy relacyjnej bazy danych jest:
b) uporządkowanym ciągiem atrybutów
Krotka, n-tka to rekord, wiersz, uporządkowany ciąg wartości atrybutów
31. Tablica relacji jest:
d) skończonym zbiorem krotek (n-tek)
Relacja lub tablica relacji to skończony ciąg krotek.
Atrybuty muszą być uporządkowane, krotki niekoniecznie.
Wiersze = krotki.
Kolumny = atrybuty.
78
®®

32. W operacjach logicznych na tablicach relacji (suma, różnica, iloczyn tablic):
c) operandy muszą mieć identyczny zestaw atrybutów
W dodawaniu, mnożeniu i odejmowaniu konieczna jest identyczność operandów.
Operandy muszą mieć identyczne atrybuty.
33. Iloczyn relacji (w relacyjnej bazie danych):
c) daje w wyniku te krotki, które należą jednocześnie do obydwu relacji
34. Różnica relacji (w relacyjnej bazie danych):
a) pozostawia te krotki w odjemnej, dla których nie istnieją krotki w odjemniku (odjemnik jest
wzorcem zabierania krotek)
odjemna – odjemnik = różnica
Odjemnik jest wzorcem zabierania krotek z odjemnej.
Odejmowanie zawiera w sobie operację iloczynu relacji, najpierw znajdujemy cześć wspólną, która
zostaje odrzucona.
35. Projekcja w tablicy relacyjnej bazy danych jest:
b) tworzeniem
pionowego podzbioru przez wybór określonych atrybutów i usunięcie powtórzeń
krotek
Projekcja eliminuje powtórzenia.
36. Selekcja w tablicy relacyjnej bazy danych jest:
a) tworzeniem poziomego zbioru relacji przez wybór krotek spełniających określony warunek
Do selekcji służą: konektory i operatory, wynikiem jest wyraz logiczny.
Operatory ( = ; > ; < ; <= ; => ; <> ; LIKE )
Konektory ( AND; OR; XOR )
37. Jedną z wad numerycznego modelu terenu opartego na siatce regularnej:
d) jest niemożliwe wierne odzwierciedlenie linii charakterystycznych terenu (linii
szkieletowych)
38. Tworzenie numerycznego modelu terenu opartego na węzłach regularnej siatki
kwadratów, z oddzielnym wyznaczaniem wysokości każdego węzła polega na:
c) wyznaczeniu wysokości węzła na podstawie punktów źródłowych z najbliższego otoczenia,
jako średniej ważonej, przy czym wagi są odwrotnościami odległości pomiędzy węzłem a
punktami źródłowymi w potędze 1 – 4, w zależności od stopnia regularności terenu
Każdy punkt będzie liczony oddzielnie na podstawie wysokości punktów które znajdują się w
jego sąsiedztwie.
Był podany wzór dla oddzielnego wyznaczania wysokości każdego punktu:
Zp = (suma Ws * Zs)/suma Ws gdzie Ws =1/Ds^t
t <1;4>
79
®®
39. Jeżeli powierzchnia topograficzna terenu aproksymowana jest za pomocą wielomianu
dwuliniowego, rozpiętego na punktach nad węzłami siatki regularnej, to wysokość
dowolnego punktu jest równa:
a) średniej ważonej z wysokości czterech najbliższych węzłów, przy czym wagi są równe polom
prostokątów leżących naprzeciwko węzłów
40. Algorytm tworzenia siatki trójkątów numerycznego modelu terenu przy nieznanych
połączeniach punktów źródłowych (zwany algorytmem triangulacji):
c) musi być uwzględniony każdy punkt zbioru, a procedura postępowania musi być
jednoznaczna
Materiałem wyjściowym jest zbiór punktów rozproszonych, których połączenie nie jest
znane, dla dalszych operacji musimy połączyć te punkty w siatkę trójkątów.
Warunki:
1) tworzone trójkąty powinny być zbliżone do równobocznych
2) każdy punkt ze zbioru powinien być uwzględniony
3) procedura powinna być jednoznaczna
41. Podstawowym kryterium powiązania punktów, zgodnie z algorytmem triangulacji
Delaunay’a jest:
b) pozostawienie tych punktów, których symetralne powiązań z punktem centralnym
utworzyły wielobok Thiessena
Algorytm triangulacji Delaunay’a:
1) wybór odległości – promienia większego niż średnia odległość pomiędzy punktami,
2) przebieganie wszystkich punktów i dla każdego punktu zataczamy okrąg, w okręgu
znajdują się punkty kandydujące do połączenia z punktem Pi
3) połączenie wszystkich punktów z punktem Pi oraz poprowadzenie symetralnych odcinków,
4) budowa wieloboków Thiessena z połączenia symetralnych,
5) z punktów kandydujących wygrywają te których symetralne utworzyły wielobok
Thiessena,
6) te punkty które nie utworzyły wieloboku Thiessena są odrzucane
7) procedura powtarzana dla wszytskich punktów
42. Wysokość interpolowanego punktu za pomocą płaszczyzny przechodzącej przez trzy
najbliższe punkty, przy wykorzystaniu numerycznego modelu opartego na nieregularnej
siatce trójkątów, jest równa:
d) średniej ważonej z wysokości trzech najbliższych punktów węzłowych, przy czym wagi są
równe polom trójkątów leżących naprzeciwko węzłów
80
®®

81
®®
RACHUNEK WYRÓWNAWCZY I MODELOWANIE STATYSTYCZNE
1. Który zapis macierzowy jest poprawny:
A(m,n) x B (n,k) = C (m,k)
2. Jak definiuje się algebraiczne dopełnienie A elementu
i, j a i, j macierzy A :
Czynnik A
i,j
nazywamy dopełnieniem algebraicznym elementu a
i,j
macierzy A i definiujemy
jako liczbę:
A
i,j
= (-1)
i+j
M
i,j
gdzie M
i,j
jest wyznacznikiem macierzy kwadratowej stopnia n-1 , powstałej z macierzy A
przez skreślenie i-tego wiersza j -tej kolumny.
3. Jak definiuje się, defekt macierzy:A :m,n
1) d = R(A)- m
2) d = R(A)- n
3) d = n -R(A)
4) d = min(n,m)- R(A)
4. Macierz ortogonalna musi spełniać warunek:
AA^T = A^TA = E
E-macierz jednostkowa
5. Zakładając, że istnieje jednoznaczny rozkład macierzy A na czynniki trójkątne A = HT ´ G ,
można wyznaczyć odwrotność macierzy A według zależności:
a) A^-1 = (Ht)^-1 x G^-1
>>b) A^-1 = G^-1 x (Ht)^-1
c) A^-1 = G x (Ht)^-1
d) A^-1 = Ht x G^-1
6. Dane są dwie macierze kwadratowe stopnia 8. Macierz A jest obarczona defektem d = 3 ,
natomiast macierz B - defektem d = 4 . Iloczyn tych macierzy obarczony będzie defektem
większym niż:
>>a) 3
b) 4
c) 5
d) 7
Jak policzy??
Macierze kwadratowe st. 8 : A (8,8), B(8,8)
Def. defektu
d = min(n,m)- R(A)
82
®®

dA = 3 --> R(A) = 8-3= 5
dB = 4 --> R(B) = 8-4= 4
A (8,8) * B(8,8)= C(8,8)
Wł. rzędu macierzy
R(ABC)<=min(R(A)uR(B)uR(C))
Czyli: R(C)≤min(5,4) --> 4
Defekt dC = 8 – 4 = 4
skoro R(C) ≤ 4 to może być też 3,2,1 ,czyli dC= 5 lub dC=6 lub dc=7
odp. 1)
7. Macierz modalna jest to macierz utworzona na podstawie:
Wektorów własnych macierzy
8. Jaki warunek muszą spełniać zdarzenia niezależne:
P(AxB) = P(A) x P(B)
9. Która z charakterystyk liczbowych jednowymiarowej zmiennej losowej jest miarą
rozrzutu jej wartości:
Wariancja
10.Jakim wzorem opisana jest funkcja prawdopodobieństwa w rozkładzie dwuwymiarowym:
odp 1) P(k,n,p) = (nk)pk qn-k
P(k,n,p)= (n k )*p^k*q^(n-k)
11. Funkcja gęstości rozkładu normalnego posiada maksimum dla:
X=u
12.Przyrost dystrybuanty rozkładu normalnego w przedziale
(x +- sigma)
wynosi:
0.68
13.Wartość przeciętna rozkładu chi-kwadrat o k stopniach swobody wynosi:
k
14.Wariancja rozkładu Studenta o k stopniach swobowy wynosi:
k/k-2
15.Rozkład brzegowy składowej X dwuwymiarowej zmiennej losowej (X , Y ), która przyjmuje
skończoną liczbę par wartości xi, yk , wyraża się wzorem:
a) P(X=xi) = pik
>>b) P(X=xi) = E(k) pik
c) P(X=xi) = E(i) pik
d) P(X=xi) = pik + pki
16.Wartość przeciętna zmiennej losowej X z zaobserwowanej próby X Î {1, 2, 4, 5} wynosi:
3
Skąd to się wzieło (wzór)??
E= suma(xi*pi)
pi=ni/Eni
co podstawiacie za ni 4??
17.Odchylenie standardowe zmiennej losoÎ {1, 2, 4, 5} wynosi:
83
®®
pierw(10/3)
Skąd to się wzieło
średnia to 3: (1-3)^2+(2-3)^2+(4-3)^2+(5-3)^2=10 10/(n-
1)=10/3 i pierwiastek z tego
r)?
k- wartosc przecietna
pierwiastek(suma((k-xi)^2)/n-1)
18.Jaki parametr zmiennej losowej definiuje moment absolutny 1 rzędu:
wartość przecietna
19.Jak definiuje się kowariancję dwóch zmiennych losowych:
cov(X,Y)=E[(X-E(X))-(Y-E(Y))]
20.Macierz wariancyjno-kowariancyjną dla zmiennej dwuwymiarowej definiuje się za
pomocą:
MOMENTÓW CENTRALNYCH DRUGIEGO RZEDU
a nie powinno być momentów zwykłym pierwszego rzędu??? nie
21.Jaką wartość ma współczynnik korelacji r dla macierzy cov(X ,Y ) = êú :
odp 3) 1/sqrt(8)
22.Dla rozkładu wariancji z próby zmiennej losowej X estymator nieobciążony definiuje się
wzorem:
a) sigma^2 = (1/n) $E [Xi - E(X)^2]^2
>>b) sigma^2 = (1/n-1) $E [Xi -E(X)]^2
c) sigma^2 = $E [Xi - E(X)^2]^2
d) sigma^2 = n $E [Xi - E(X)^2]^2
23.Waga zmiennej losowej X d efiniuje się wzorem:
pi=1/sigma^2
24.Kwantyl zmiennej losowej rozkładu normalnego określony jest przez:
POZIOM UFNOŚCI
25.Zmienna losowa X ma rozkład N (m, ) przy czym m i s są nieznane. Przedział ufności dla
wartości przeciętnej jest określany:
z rozkładu t Studenta
26.Zmienna losowa X ma rozkład N (m, ) przy czym s jest znane. Ile wynosi
prawdopodobieństwo, że zmienna losowa znajdzie się w przedziale X Î [E(X )± 2 ] :
0.95
27.Co zawiera macierz 2G w modelu (L, AX, 2G ):
wariancje i kowariancje
28.Dla modelu (L, AX, 2G ) kryterium MNK ma postać (przy czym G -1 = P):
(L-AX)^TxP(L-AX)=min
29.W trójkącie o znanych i bezbłędnych współrzędnych dwóch punktów pomierzono
trzy kąty z jednakową dokładnością, wynoszącą +-10cc. Współrzędne trzeciego
84
®®

punktu wyrównano metodą pośredniczącą. Obliczono poprawki do wartości kątów
pomierzonych. Ile wynisi odchylenie standardowe sumy kątów w trójkącie po
wyrównaniu?:
0[cc] - skąd taki wynik?
Bo pytają o odchyłki po wyrównaniu, a nie przed, więc nie trzeba nic
liczyć
odchyłki ale odchylenie standarowe to jest to samo? Jeżeli v=0 to suma (VTPV)/(n-u) również
jest równe 0
30.Dla modelu (L, AX, 2G ) estymator wariancji resztowej ma postać:
a) sigma^2 = VtP^-1V / n-u
>>b) sigma^2 = VtPV / n-u
c) sigma^2 = VPV / n-u
d) sigma^2 = PVV / n-u
31.Dla modelu (L, AX, 2G ) macierz A musi być zawsze:
prostokątna pionowa
32.Dla modelu (L, AX, 2G ) macierz L stanowi:
różnica wartości obliczonyc i obserwowanych
co?? L to jest roznica wartosci pomierzonych- wartosci przyblizonych
33.W modelu (L, AX, 2G ) wektor niewiadomych stanowi:
a) odchyłki losowe do wielkości obserwowanych
>>b) przyrosty do przybliżonych parametrów
c) przyrosty do wielkości obserwowanych
d) odchylenie standardowe
34. W jakim przypadku macierz G w modelu (L, AX, 2G ) będzie macierzą jednostkową:4
Gdy obserwacje są niezależne i wykonane z jednakową dokładnością
a) gdy obserwacje są jednego rodzaju, na przykład obserwowane są tylko przewyższenia
b) gdy układ jest mieszany , na przykład sieć kątowo-liniowa
c) gdy obserwacje są niezależne
>>d) gdy obserwacje są niezależne i są wykonane z jednakową dokładnością
35.Układ obserwacji δ + AX = L zapisany dla 18 wielkości obserwowanych zawiera 12
niewiadomych. Jaki jest stopień swobody tego modelu:
6
36.Jaka jest postać równania obserwacji dla przewyższenia h ( Dz1-2 - to różnica
przybliżonych wysokości reperów 1 i 2)
odp 3) sigma h + dz2 - dz1 = h - delat z1-2
37.Jaka jest postać równania obserwacji dla poziomej odległości między stałym punktem P a
wyznaczanym punktem K:
odp 3) dh + dz2 - dz1 = h - delta z1-2.
Jakie h????
delta d= cosApk*dXk + sinApk*dYk moim zdaniem tak powinno być.
a mając takie opcje do wyboru: moim zdaniem odp. 3
85
®®
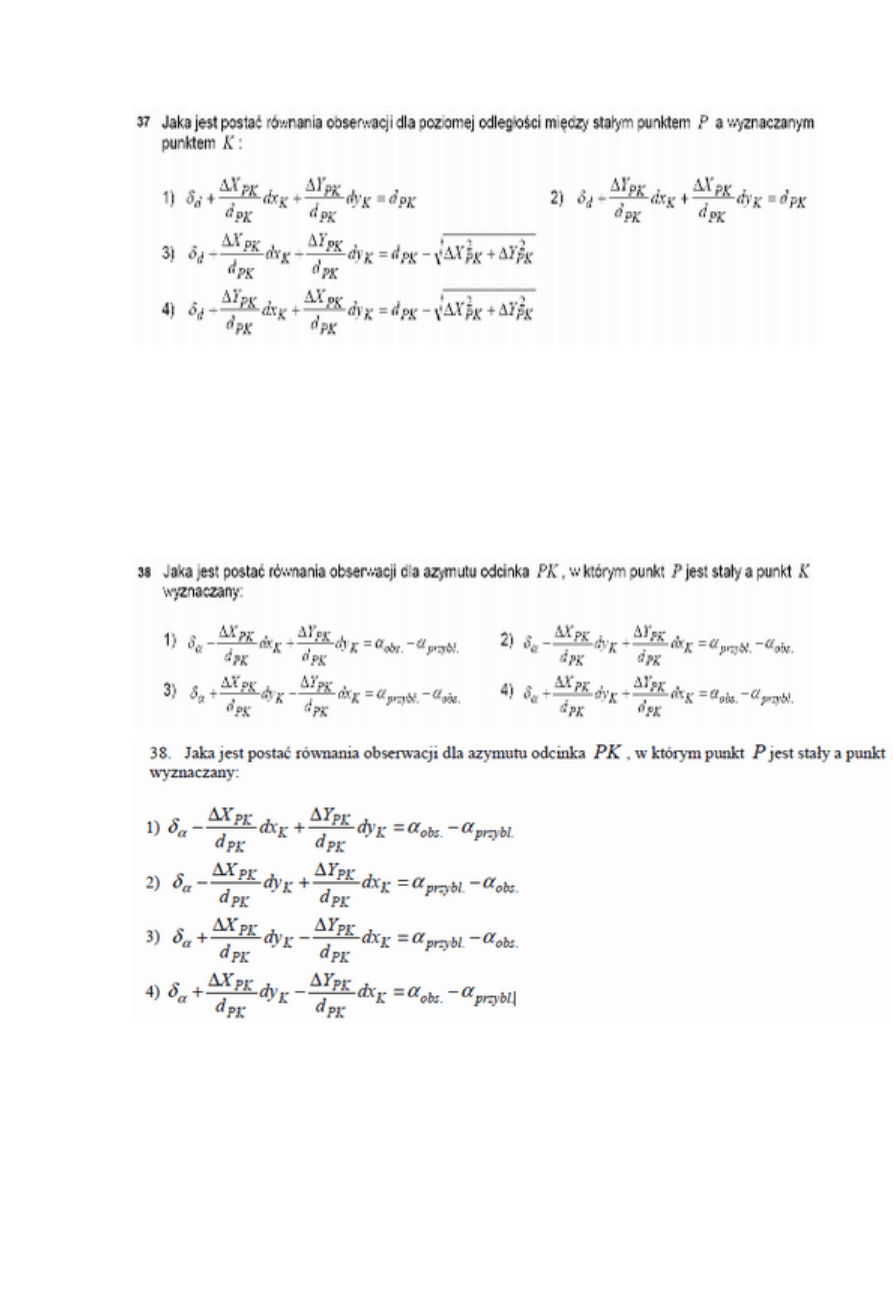
odp 3
38.Jaka jest postać równania obserwacji dla azymutu odcinka PK , w którym punkt P jest stały
a punkt K wyznaczany:
dA= A(dYk) - B(dXk) moim zdaniem tak powinno być ale nie jestem pewien. Bo przyrosty do
punktu stałego P są zerowe więc współczynniki przy przyrostach dXp i dYp się kasują.
i z tych poniżej która będzie prawidłowa?
a ja znalazłam takie warianty i mam zaznaczone, że poprawna jest 4)
napewno 2
a nie 4? chyba zawsze powinno sie odejmowac od wartosci zaobserwowanej
wartosc przyblizona.
Moim zdaniem to jest odp 4. Tak jak macierze wygladaja: odchyłki+AX=L. Zawsze sie
odejmuje wartosc teoretyczną od obserwowanej. 4!!!
ale w 4 sie znak nie zgadza jak
86
®®

juz 4 to powinno być chyba -dx i +dy dlaczego właśnie
Ale znak się zgadza bo skoro nie
ma d^2 i ro to są to równania dla długości wiec -dxp -dyp +dxk +dyk tylko powinno być
chyba alfprzyb - alfaobs właśnie
ale tutaj jest odchyłka która ma znak “-”. Skoro tutaj jest na plusie to oznacza ze po prawej
stronie tez sie zmienia znaki i bedzie alfa przyblizone - alfa obserwowane a po lewej -dy + dx
wiec odpowiedz 2) wg mnie
a nei 3 np? gdyby byly poprawki to byloby 3)
Też jestem za 3).
TO JAK W KOŃCU MA BYĆ?
odp 2 ponieważ znak przyrostów dyk i dxk ulegaja zmianie - są przenoszone z prawej
strony na lewą ( - stad ta niby “niezgodność” znaków DZIĘKUJĘ!:)
Zauważ że jak powyżej jest rownanie dla odl to poprawne jest obs-przyb pomimo też
przenoszenia stronami;/ i jeszcze hwyrownane (nie pomierzone) = hprzyb - poprawka
39.Jaka jest postać warunku dla kątów (lewych) w figurach otwartych o znanych na końcach
azymutach α:
a nie tak?: Edi = EBi + aP - aK -(n-1)200g
- dokładnie tak
azymut początkowy - końcowy to nie wzór przypadkiem na kąty prawe?
40.W modelu (L, IX, δ2G, Bδ - t = 0) macierz L oznacza:
wielokosc obserwowane
41.W modelu (L, IX, δ2G, Bδ - t = 0) macierz X oznacza:
wielkości modelowe
42.W modelu (L, IX, δ2G, Bδ - t = 0) macierz 2G oznacza:
macierz kowariancji dla wielkośći obserwowanych
43.W modelu (L, IX, δ2G, Bδ - t = 0) macierz B oznacza:
macierz wspolczynnikow
44.W modelu (L, IX, δ2G, Bδ - t = 0) macierz δ oznacza:
macierz odchylek losowych do wielkosc obserwowanych
45.W modelu (L, IX, δ2G, Bδ - t = 0) macierz t oznacza:
macierz wyrazow wolnych w warunkach funkcyjnych
46.W siecie wysokościowej, nawiązanej do dwóch punktów stałych (przyjęte za bezbłędne),
oraz trzech punktów dla których znana jest macierz wariancyjno-kowariancyjna,
wyznaczono na podstawie 10 obserwacji wysokości trzech reperów. Ile wynosi liczba
stopni swobody?
ile tu będzie?
87
®®
1) 2
2)
5
3) 7 raczej 13 - 6 (bo punkty błędne są zarówno obserwacjami i niewiadomymi),
- całkiem
mozliwe ze masz racje:D
4) 10
47.Przedział ufności dla wariancji zmiennej losowej X o rozkładzie n < 50 jest definiowany za
pomocą rozkładu:
a) normalnego
b) Studenta
c) chi-kwadrat
d) Fishera
48.Jaki jest wzór na odchylenie standardowe średniej arytmetycznej rozkładu z próby o n
elementach:
a) sigma n / n-1
b) sigma n / n
>>c) sigma n / pierw(n)
d) sigma n / pierw(n-1)
49.Jaki jest wzór na odchylenie standardowe wariancji rozkładu z próby o n elementach:
a) pierw (1/n-1) x sigman^2
>>b) pierw (2/n-1) x sigman^2
c) pierw (1/n) x sigman^2
d) pierw (1/n-1) x sigman
50.Jakim estymatorem jest średnia arytmetyczna:
a) obciążonym
b) obciążonym i efektywnym
c) nieobciążonym i efektywnym
d) nieefektywnym
Geodezja Inżynieryjna i Budownictwo
1. Dokładności centymetrowe wyznaczenia pozycji względnej za pomocą GPS są
uzyskiwane w trybie pracy:
1) autonomicznym
2) nawigacyjnym
88
®®
3) różnicowymm kodowym
4) różnicowym fazowym
2. Korekcje nadawane przez satelity geostacjonarne systemu EGNOS są
wykorzystywane w trybie pracy:
1) różnicowym kodowym
2) różnicowym fazowym
3) autonomicznym
4) nawigacyjnym
3. Najwyższe dokładności wyznaczenia pozycji, jakie zapewnia system ASG-
EUPOS-PL, są osiągane w trybie pracy:
1) nawigacyjnym
2) różnicowym kodowym
3) różnicowym fazowym
4) autonomicznym
4. Minimalna ilość satelitów pozwalająca na jednoznaczne wyznaczenie pozycji
w dowolnym trybie pracy systemu GNSS to:
1) 6
2) 4
3) 2
4) 1
5. Zegar odbiornika sygnałów GNSS jest synchronizowany z czasem systemu
przez:
1) łącze internetowe
2) łącze radiowe za pośrednictwem lokalnych stacji UKF
3) wyznaczenie dodatkowej niewiadomej w równaniu pseudoodległości
4) wyznaczenie dodatkowej niewiadomej z obserwacji dopplerowskich
6. Klotoida to krzywa przejściowa, której
:
1) długość jest wprost proporcjonalna do promienia
2) długość jest odwrotnie proporcjonalna do krzywizny
3) iloczyn długości klotoidy i stycznej krótkiej jest stały
4) iloczyn długości i promienia jest wielkością stałą
7. Osnowę realizacyjną zakłada się, gdy:
dokładność istniejącej osnowy geodezyjnej jest zbyt mała w stosunku do
wymagań stawianych osnowie realizacyjnej
89
®®
8. Łuk koszowy to:
1) zespół następujących po sobie łuków kołowych o różnych
promieniach, zakrzywionych w tym samym kierunku
2) inaczej zespół łuków odwrotnych
3) zespół serpentyn
4) inaczej parabola sześcienna
9. Szkic dokumentacyjny należy opracować:
1) przed tyczeniem punktów realizowanego obiektu
2) bezpośrednio po wytyczeniu obiektu
3) podczas pomiarów powykonawczych wybudowanych obiektów
4) w dowolnym czasie realizacji obiektu
10. W trakcie geodezyjnej obsługi procesu budowlanego geodeta przekazuje wyniki
pomiarów:
1) inwestorowi
2) kierownikowi budowy
3) projektantowi
4) inspektorowi nadzoru inwestycyjnego
11. Który z dokumentów przygotowuje się w oparciu o plan zagospodarowania
terenu:
1) szkic tyczenia
2) szkic dokumentacyjny
3) plan robót ziemnych
4) szkic kontrolny
12. Geodezyjne pomiary przemieszczeń obiektu i jego podłoża oraz wyznaczenie
odkształceń obiektu w trakcie budowy wykonywane są jeżeli:
1) budowane są obiekty przemysłowe
2) są przewidziane w projekcie lub na wniosek uczestnika procesu
budowlanego
3) wysokość budynków przekracza 10m
4) budowa dotyczy terenów w pobliżu eksploatacji górniczej
13. Dokumentacja geodezyjno-kartograficzna sporządzana w wyniku
geodezyjnej inwentaryzacji powykonawczej jest podstawą wprowadzenia
zmian:
90
®®
1) w miejscowym planie zagospodarowania przestrzennego
2) w księgach wieczystych
3) na mapie zasadniczej
4) w projekcie realizowanego obiektu
14. Uzgodnień usytuowania projektowanych sieci uzbrojenia terenu dokonuje się
na wniosek:
1) kierownika budowy
2) organu wydającego pozwolenie na budowę
3) inwestora lub jego upoważnionego przedstawiciela
4) projektanta
15. Mapę do celów projektowych można sporządzić w układzie lokalnym dla danej
inwestycji w przypadku:
1) lokalizacji inwestycji na terenach wiejskich
2) budowy pojedynczych obiektów o prostej konstrukcji usytuowanych
w granicach jednej nieruchomości, przy braku mapy zasadniczej w
odpowiedniej skali
3) gdy teren objęty inwestycją nie przekracza powierzchni 1 ha
4) budowy związanej z regulacją rzek
16. Stała dodawania to parametr określany dla:
1) Dalmierza elektrooptycznego,
2) Niwelatora cyfrowego,
3) Instrumentu GPS,
4) Zestawu dalmierz-reflektor
17. Niwelatory cyfrowe oraz łaty niwelacyjne kodowe różnych producentów:
1) Są wzajemnie kompatybilne
2) Nie są wzajemnie kompatybilne
3) Używają tego samego kodu
4) Mogą być używane razem po wprowadzeniu odpowiedniej poprawki
18. Instrumenty klasy GNSS pracujące w trybie RTK/RTN pozwalają na osiąganie
dokładności rzędu:
1) Lepsze niż milimetr,
2) Centymetrowe,
3) Decymetrowe,
91
®®
4) Metrowe.
19. Podane błędy instrumentalne: błąd kolimacji, inklinacji, błąd indeksu,
wyznaczamy:
1) Z pomiarów w jednym położeniu lunety
2) Z pomiarów w co najmniej w 2 położeniach lunety
3) Z pomiarów w co najmniej 3 położeniach lunety
4) Z pomiarów w nie mniej niż 4 położeniach lunety
20. Dalmierzem elektrooptycznym o specyfikacji dokładności 2mm + 2ppm
pomierzono odległość 500m uwzględniając aktualne wartości parametrów
atmosferycznych (temperatura, ciśnienie, wilgotność). Należy się liczyć z błędem
około:
1) 1 milimetra
2) 3 centymetrów
3) 3 milimetrów
4) 1 decymetra
21. System ATR w tachymetrach elektronicznych:
1) zapewnia poziomość koła poziomego teodolitu
2) umożliwia automatyczne przejście do drugiego położenia lunety
3) pozwala na bezreflektorowy pomiar odległości
4) zapewnia precyzyjne wycelowanie na środek reflektora
22. Poprawki trasowania:
1) wprowadza się w przypadku osnów realizacyjnych nieregularnych (
dla
regularnych osnów się wprowadza)
2) wprowadza się do współrzędnych nominalnych, aby otrzymać współrzędne
wyrównane
(do współrzędnych pomierzonych się wprowadza??)
3) nie powinny być obliczane metodą najmniejszych kwadratów
powinny być
obliczane MNK)
4) wprowadza się fizycznie w terenie
23. Przy sporządzaniu mapy do celów projektowych nie bierze się pod uwagę:
1
) linii zabudowy
2) szkiców dokumentacyjnych
3) nakładki W mapy zasadniczej
4) projektowanych sieci uzbrojenia terenu
92
®®
24. Do badania przemieszczeń fundamentu służy 6 reperów. Przy założeniu, że
fundament jest płytą sztywną, liczba obserwacji nadliczbowych w wyrównaniu
parametrów przemieszczeń pionowych wynosi:
1) 0
2) 2
3) 3
4) 4
Dlaczego?
(są trzy parametry przemieszczen: ex,ey i uz - więc wystarczy 3
punkty - 6 punktów oznacza 3 obserwacje nadliczbowe)
6 - 3 = 3 (6 reperów 3 niewiadome)
25. Urządzenia naziemne uzbrojenia terenu należą do:
1) I grupy dokładnościowej szczegółów sytuacyjnych
2) II grupy dokładnościowej szczegółów sytuacyjnych
3) IV grupy dokładnościowej szczegółów sytuacyjnych
4) Nie należą do żadnej
26. Urządzenia podziemne uzbrojenia terenu należą do:
1) I grupy dokładnościowej szczegółów sytuacyjnych
2) II grupy dokładnościowej szczegółów sytuacyjnych
3) IV grupy dokładnościowej szczegółów sytuacyjnych
4) Nie należą do żadnej
27. Metoda pośredniej lokalizacji metalowych przewodów podziemnych będących
pod napięciem polegająca na bezpośrednim podpięciu generatora do przewodu
nosi nazwę:
1) metody indukcyjnej
2) metody galwanicznej
3) metody Power
4) metody radio
28. Geodezyjna inwentaryzacja sieci uzbrojenia terenu jest czynnością geodezyjną,
która:
1) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji
geodezyjno-kartograficznej
2) podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji
geodezyjno-kartograficznej
3) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji
geodezyjno-kartograficznej, chyba, że wymaga tego inwestor
93
®®
4) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji
geodezyjno-kartograficznej, chyba że wymaga tego kierownik budowy
29. Na błąd położenia ostatniego punktu w ciągu wiszącym ma/mają wpływ:
1) tylko błąd położenia punktu nawiązania
2) tylko błędy pomiaru kątów poziomych w tym ciągu
3) tylko błędy pomiaru długości boków w tym ciągu
4) wszystkie wymienione wyżej błędy
30. Pod jakim kątem pionowym α jest nachylony teren jeśli jego spadek wynosi
100%? :
1) 100 gradów
2) 100 stopni
3) 45 stopni
4) 90 stopni
31. Pomiar wychylenia obiektu wysokiego należy wykonywać :
1) tylko z jednego stanowiska
2) z kilku stanowisk, z każdego w innym dniu
3) z kilku stanowisk w jak najkrótszym czasie
4) podczas silnego wiatru
33. Rama geodezyjna to:
1) osnowa realizacyjna w postaci prostokąta, związana geometrycznie z
układem osiowym obiektu budowlanego
2) geodezyjnie wytyczony zasięg budowli, najczęściej w formie prostokąta
3) przybite poziomo na palach deski, umiejscowione w narożnikach budowli poza
zasięgiem wykopów
4) linia łącząca zewnętrzne punkty osnowy realizacyjnej obiektu budowlanego
34. Krzywizna łuku kołowego to:
1) stosunek promienia łuku do długości łuku
2) stosunek długości łuku do promienia łuku
3) odwrotność promienia łuku
4) odwrotność długości łuku
35. Krzywa przejściowa to:
1) krzywa o krzywiźnie zmieniającej się od zera do R wstawiana między prostą a łuk
kołowy
94
®®
2) krzywa o krzywiźnie zmieniającej się od zera do 1/R wstawiana między
prostą a łuk kołowy
3) krzywa o krzywiźnie zmieniającej się od zera do h (h - różnica rzędnych
terenu między prostą, a łukiem kołowym)
4) krzywa obrazująca opór jaki musi pokonać pojazd przy przemieszczaniu się z
prostej w łuk
36. Ławy ciesielskie służą do:
1) regulacji taśmociągów i ciągów technologicznych
2) wielokrotnego odtwarzania osi fundamentów lub obrysów budynku
3) zabezpieczenia wykopów fundamentowych
4) przenoszenia rzędnej na dno wykopu
37. Tyczenie jednoetapowe to:
1) wyznaczanie położenia punktu na podstawie pomiarów kątowych,
2) wyznaczanie punktu na podstawie określonego przybliżonego położenia,
3) tyczenie na podstawie pomiarów liniowych,
4) wyznaczanie położenia z pomiarów bezpośrednich.
38. Poziom zera budynku stanowi:
1) wysokość gruntu wokół budynku,
2) wysokość podstawy fundamentu,
3) wysokość pierwszego piętra,
4) wysokość górnej powierzchni stropu piwnic.
39. Do opracowania planu realizacyjnego inwestycji liniowych
zlokalizowanych poza terenami zabudowanymi służą mapy w skali:
1) 1:1000
2) 1:2000
3) 1:5000
4) 1:25 000
wg mnie odpowiedź 4 cytat z instrukcji G-3 “
Skalę map do opracowania planu realizacyjnego
należy dostosować do rodzaju i obszaru inwestycji, przy czym dla inwestycji liniowych
napowietrznych, zlokalizowanych poza terenami zabudowanymi, stosuje się z zasady mapy w
skalach 1 : 25000,1 : 10000”’
skala map dla rozległych terenów z obiektami budowlanymi o dużym rozproszeniu
oraz obiektami liniowymi może wynosić 1:2000 <ZRODLO: http://pl.wikipedia.org/wiki/
Mapa_do_cel%C3%B3w_projektowych>
2. Skalę map do celów projektowych należy dostosować do rodzaju i wielkości obiektu lub całego
zamierzenia budowlanego, przy czym:
1) skala map rozległych terenów z obiektami budowlanymi o dużym
rozproszeniu oraz obiektami liniowymi może wynosić 1:2000.
95
®®
Rozporządzenie Ministra Gospodarki Przestrzennej i Budownictwaz dnia 21 lutego 1995 r. w sprawie rodzaju
i zakresu opracowań geodezyjno-kartograficznych oraz czynności geodezyjnych obowiązujących w
budownictwie
Czyli kto ma rację? Instrukcja G-3, Rozporządzenie, czy też może WIKIPEDIA...?
1:2 000 ma byc, przeciez insturkcje nie obowiazuja... plus w g3 masz
napisane ‘
stosuje się z zasady’,
czyli nie jest to obligatoryjna wielkosc
Odpowiedź jak w G3 bo:
-mowa o planie realizacyjnym a NIE o mapie do celów projektowych
-to pytanie wygląda jakby było układane słowo w słowo do tego paragrafu
odpowiedz od Kurasa, aczkolwiek nie jest pewny “Przede wszystkim pytanie jest
o plan realizacyjny. To pojęcie istniało
w starym Prawie budowlanym (1974 r.). W nowym (1994 r.) już go nie ma.
Moim zdaniem zawarta jest tu sugestia, że nie musimy patrzeć na
aktualność przepisów, więc G-3 możemy brać pod uwagę. Dalej, pytanie
nie jest o MDCP, a w rozporządzeniu z 1995 r. jest informacja o skali
właśnie MDCP
z kolei szef powiedział mi, ze plany realizacyjne są wykonywane na podkładzie
mapy zasadniczej, a mapę zasdniczą wykonauje się w skalach od 1:500 - 1:2000
więc niech ktoś się wypowie, bo nie wiem co o tym myśleć
40. Pomiary kątowe i liniowe skoordynowane dokładnościowo to:
1) ml
m
m
ml
2)
l
m
ml
3)
l
m
ml
4)
l
(gdzie: - kąt, l - długość, m - średni błąd pomiaru kąta, ml -
średni błąd pomiaru długości,
- zamiennik miary)
malfa/ro=ml/l ---> dla tych co nie widzą obrazków
41. Długość łuku kołowego o promieniu R = 100,00 m. i kącie zwrotu a =
50g00c00cc wynosi:
1) 75.00 m
2) 78,54 m
3) 80,36 m
4) 100,00 m.
wzór: (R*alfa)/ro
96
®®
42. Długość stycznej łuku kołowego o promieniu R = 100,00 m. kącie zwrotu
100g00c00cc wynosi:
1) 50.00 m.
2) 70.71 m.
3) 80.60 m
4) 100.00 m.
wzór: R*tan(alfa/2)
43. Błąd średni zmierzonej długości 500,000 m wynosi ± 2 mm; błąd względny
pomiaru tej długości wyniesie:
1) 1/25 000
2) 1/100 000
3) 1/200 000
4) 1/250 000
44. Współrzędne prostokątne narożnika budynku, w układzie osnowy realizacyjnej
wynoszą x=42.00, y=26.29. Jakie są współrzędne biegunowe tego narożnika ?
1) d = 52.38
α = 38g.1570
2) d = 50.50
α = 38g.0000
3) d = 49.55
α = 35g.6051
4) d = 48.00
α = 34g.2500w
jak policzyc??????????????????????/
- inżynier xD
długość d mozna policzyc jako przeciwprostokatną z twierdzenia Pitagorasa (x i y
przyrostokatnymi), kąt policzyć np z funkcji tangensa
Przyjąć sobie jakiś punkt x=0 y=0 i dlugosc z pierwiastekdx^2+dy^2 i potem
azymut
45. W celu dokładnego wytyczenia w terenie kąta a = 38°20'50"odłożono jego
wartość przybliżoną a=38o21'00" od znanego kierunku i utrwalono drugi kierunek
tego kąta w odległości d = 200,00 m. Jakie powinno być przesunięcie liniowe, które
ustali dokładnie drugi kiunek tyczonego kąta?
1) 25 mm
2) 15 mm.
3) 10 mm.
jak to policzyć?
(funkcja malych kątów)
4) 4 mm
.
wychodzi wam dokładnie 10mm tak to licze i mi nie wychodzi x= d * 10” / ro” ??
97
®®
wychodzi dokładnie 9.7mm (x=200m*10”/206265”)
46. Rozszyfruj skrót ZUDP:
1) Zakład Uszlachetniania Dalmierzy Precyzyjnych
2) Zespół Uzgadniania Dokumentacji Projektowych
3) Zjazd u Drogowców Powiatowych
4) Ziemski Urząd Dokumentacji Powykonawczej
a nie odp 3?
- wysłałam maila do aliny, to się dowiemy
XD
odpisała? Jeśli nie, to może sama nie wie?
nie odpisała bo jest na zjeździe
47. Metoda biegunowa tyczenia lokalizującego polega na:
1) odłożeniu odległościod bieguna
2) odłożeniu kąta i odległości
3) odłożeniu odległości biegunowej
4) wyznaczeniu poprawki w tyczeniu dwuetapowym
48. Dokumentem powstałym w wyniku geodezyjnego opracowania projektu i
będącym podstawą do wykonania tyczenia lokalizującego jest:
1) Szkic dokumentacyjny
2) Projekt konstrukcyjny
3) Sprawozdanie techniczne
4) Projekt tyczenia
49. Dokumentem technicznym wykonanego tyczenia jest:
1) dziennik pomiarowy
2) szkic tyczenia
3) wykaz miar
4) sprawozdanie techniczne
50. W razie stwierdzenia rozbieżności między wynikami pomiarów kontrolnych
przeprowadzonych na budowie a ustaleniami projektu budowlanego, geodeta
powinien:
odnotować ten fakt w dzienniku budowy lub dzienniku montażu oraz
udokumentować szkicami
51. Jakie z poniższych elementów nie należą do obiektów małej architektury:
1) Huśtawka
2) Wodotrysk
98
®®
3) Wolno stojący maszt antenowy
4) Śmietnik
52. Jakiej metody niwelacji nie stosuje się w pracach budowlano-montażowych:
1) Niwelacji barometrycznej
2) Niwelacji trygonometrycznej
3) Niwelacji geometrycznej
4) Niwelacji laserowej
53. Norma ISO 17123 jest dedykowana:
optyce i instrumentom optycznym; terenowym procedurom do badania
instrumentów geodezyjnych i pomiarowych
54. Mając dany promień łuku kołowego R = 1000 m oraz kąt środkowy (kąt
zwrotu stycznych) α = 50g podaj prawidłową długość stycznej głównej tego łuku:
1) 382,683 m
2) 414,214 m
3) 785,398 m
4) 390,181 m
wzór: R*tan(alfa/2)
55. Mając dany promień łuku kołowego R = 1000 m oraz kąt środkowy (kąt
zwrotu stycznych) α = 50g podaj prawidłową długość tego łuku:
1) 382,683 m
2) 414,214 m
3) 785,398 m
4) 390,181 m
wzór: (R*alfa)/ro
56. Przy realizacji sieci uzbrojenia terenu dopuszczalne jest odstępstwo
od uzgodnionego projektu, nieprzekraczające dla gruntów zabudowanych:
1) 0,10 m
2) 0,30 m
3) 0,50 m - dla gruntów rolnych i leśnych
4) 0,70 m
99
®®
57. Osoby wykonujące prace geodezyjne i kartograficzne mają prawo wstępu
na grunt i do obiektów budowlanych oraz dokonywania niezbędnych czynności
związanych z wykonywanymi pracami na podstawie:
1) świadectwa nadania uprawnień zawodowych,
2) umowy o roboty geodezyjne,
3) potwierdzonego przez ośrodek dokumentacji geodezyjnej i kartograficznej
zgłoszenia roboty geodezyjnej,
4) dyplomu ukończenia studiów wyższych na kierunku geodezja i kartografia.
58. Zgłoszenia do ośrodka dokumentacji geodezyjnej i kartograficznej wymagają
prace:
1) tyczenie obiektów budowlanych oraz pomiary budowlano–montażowe,
2) pomiary wykonywane w celu ustalenia objętości mas ziemnych,
3) pomiary wykonywane w celu aktualizacji mapy zasadniczej,
4) pomiary odkształceń i przemieszczeń budowli i urządzeń.
59. Założenie i prowadzenie geodezyjnej ewidencji sieci uzbrojenia terenu
zapewniają:
1) wójt,
2) starosta,
3) marszałek województwa,
4) wojewoda.
60. Wykonaj odczyt na niwelatorze precyzyjnym KONI 007 ZEISS w sytuacji jak na
rysunku:
1) 908584
2) 295584
3) 298590
4) 908588
61. Zaznacz nieprawdziwą informacje na temat szkicu tyczenia:
1) na szkicu zaznacza się między innymi obiekty projektowane, miary konieczne
do wytyczenia ich, obliczone miary kontrolne itp.
2) wykonuje się go w dwóch kolorach: czerwonym i zielonym
3) wykonuje się dwa identyczne egzemplarze, z czego jeden dołącza się do
dziennika budowy, a drugi do dziennika prac geodezyjnych.
4) jeżeli naniesienie na tym samym szkicu zarówno miar kontrolnych jak i miar do
tyczenia powodowałoby nieczytelność rysunku, wykonuje się dwa odrębne szkice.
100
®®
62. Maksymalny, błąd względny wyznaczenia objętości dla odpadów
przemysłowych nie powinien przekraczać:
1) 10%
2) 17%
3) 3%
dla surowców hutniczych
, dla materiałów
4) 5%
63. Różnica między odczytami na łacie lewymi i prawymi dla instrumentu KONI 007
ZEISS wynosi:
1) 60560 [j]
2) 60650 [mm]
3) 600660 [mm]
4) 606500[j]
64. Jaką metodą najlepiej ustalić objętość mas ziemnych dla nasypu kolejowego? :
1) przekroje pionowe
2) przekroje poziome
3) siatka kwadratów
4) siatka trójkątów
65. Proszę wskazać właściwe określenie przykładowej klasy technicznej drogi:
1) główna przyspieszona,
(aby było poprawnie powinno być główna ruchu
przyśpieszonego)
2) twarda ulepszona,
3) główna,
4) krajowa.
66. Prędkość projektowa jest podstawowym parametrem techniczno –
ekonomicznym i służy m.in. do ustalania:
1) klasy technicznej drogi,
2) wartości granicznych parametrów geometrycznych drogi,
3) kategorii terenu,
4) minimalnej odległości widoczności na zatrzymanie.
67. W przypadku dróg ogólnodostępnych zalecane wymiary skrajni dla
pojazdów wynoszą (szerokość x wysokość):
1) 3,5 m x 5,0 m,
101
®®
2) pas drogowy x 3,5 m,
3) korona drogi x 4,5 m,
4) jezdnia x 3,5 m.
68. Klotoida stosowana jako krzywa przejściowa jest krzywą matematyczną, której:
1) krzywizna maleje proporcjonalnie do długości łuku mierzonej od punktu
początkowego,
2) krzywizna jest proporcjonalna do promienia,
3) krzywizna wzrasta proporcjonalnie do długości łuku mierzonej od punktu
początkowego,
4) iloczyn odległości mierzonej od punktu początkowego i krzywizny jest stały,
69. Projekt niwelety drogi nie zależy od:
1) rozwiązania odwodnienia,
2) bilansu robót ziemnych,
3) rodzaju podłoża gruntowego,
4) miarodajnego godzinowego natężenia ruchu.
70. Koordynując wzajemne położenie elementów geometrycznych osi drogi w
planie i przekroju podłużnym nie należy stosować następujących rozwiązań:
1) łączyć odcinków prostych w planie na odcinkach o stałym pochyleniu w przekroju
podłużnym,
2) projektować łuków wypukłych w przekroju podłużnym na odcinkach
prostych w planie, MOIM ZDANIEM NIE TO TYLKO PONIŻEJ
OK
tez jestem
za:)
u mnie w notatkach od Firka jest stwierdzenie, że unika się sytuacji jak w
punkcie b)
A nie właśnie wklęsłych zamiast wypukłych powinno być dlatego b
jest poprawne, gdyby było łuków wklęsłych było by ok??
3) łączyć łuków wypukłych w przekroju podłużnym z odcinkami krzywoliniowymi w
planie,
4) stosować nadmiernego wzajemnego przesunięcia wierzchołków łuku wypukłego
w przekroju podłużnym oraz łuku w planie.
z pdf od Ruska: PRZY KSZTAŁTOWANIU ELEMENTÓW GEOMETRYCZNYCH
DROGI NIE ZALECA SIĘ STOSOWANIA:
1. falistego przekroju podłużnego na prostej lub w obrębie jednej krzywej w planie
(rys. 2-A i 2-B),
2. łuków wypukłych na odcinkach prostych w planie (rys. 2-C),
3. łączenia elementów niwelety i planu drogi o granicznych wartościach
parametrów,
np.: łuk w planie o małym promieniu i na dużym spadku w profilu podłużnym,
102
®®
4. załamań trasy o kątach zwrotu mniejszych niż 6o.
71. Pochylenie poprzeczne jezdni drogi o przekroju dwujezdniowym wykonuje się:
1) zawsze jako daszkowe,
2) zawsze jako jednostronne,
z Rozp 6. Jezdnia jednokierunkowa drogi powin
na mieć jednostronne pochylenie poprzeczne,
3) na prostej w planie daszkowe, a na łuku jednostronne,
4) na prostej w planie jednostronne, a na łuku daszkowe.
z Rozp Ministra transportu i gospodarki morskiej 4. Jezdnia dwukierunkowa, niezależnie od liczby
pasów ruchu, na odcinku prostym lub na odcinku krzywoliniowym nie wymagającym jednostronnego
pochylenia poprzecznego, powinna mieć kształt daszkowy, z zastrzeżeniem ust. 5.
5. Spełnienie warunku, o którym mowa w ust. 4, nie jest wymagane w wypadku prowadzenia drogi
na stromym zboczu, przewidywanej dobudowy drugiej jezdni, krótkiego odcinka prostego między
odcinkami krzywoliniowymi oraz jeżeli w wyniku zastosowania pochylenia jednostronnego uzyskuje
się korzystne warunki odprowadzenia wód opadowych, a także na ulicach klasy L i
D.
Jezdnia dwukierunkowa to nie dwujezdniowa:)
Jezdnia dwukierunkowa to droga jednojezdniowa
moze też być dwujezdniowa
Jezdnia jednokierunkowa - droga co najmniej dwujezdniowa
?? raczej minimum
jednojezdniowa
72. Nawierzchnia półsztywna w podziale ze względu na odkształcalność pod
wpływem powtarzających się obciążeń to następujące rozwiązanie:
1) bitumiczna warstwa ścieralna i wiążąca na podbudowie z kruszywa
stabilizowanego mechanicznie,
2) bitumiczna warstwa ścieralna i wiążąca na sztywnej podbudowie,
3) nawierzchnia z betonu cementowego,
4) nawierzchnia twarda nieulepszona.
73. Do fundamentów pośrednich zaliczamy:
1) ruszt fundamentowy,
2) fundament belkowy,
3) pale fundamentowe,
4) skrzynie fundamentowe
.
74. Do stropów gęstożebrowych zaliczamy:
1) drewniany strop belkowy,
2) strop Kleina,
3) strop płytowo-żebrowy,
4) strop Teriva.
103
®®
75. Proszę wskazać właściwy układ warstw w przekroju poprzecznym
klasycznego stropodachu pełnego (od wnętrza na zewnętrz):
1) konstrukcja stropu + izolacja termiczna + pokrycie dachowe,
2) konstrukcja stropu + paroizolacja + izolacja termiczna + pokrycie dachowe,
3) konstrukcja stropu + paroizolacja + izolacja termiczna + przestrzeń wentylowana
+ konstrukcja dachu +pokrycie dachowe,
4) konstrukcja stropu + izolacja termiczna + paroizolacja + pokrycie dachowe.
76. Proszę wskazać właściwy układ warstw w przekroju poprzecznym
zewnętrznej, trójwarstwowej ściany murowanej (od wnętrza na zewnętrz)
:
1) warstwa konstrukcyjna + paroizolacja + warstwa elewacyjna,
2) izolacja termiczna + warstwa konstrukcyjna + warstwa elewacyjna,
3) warstwa konstrukcyjna + przestrzeń wentylowana + izolacja termiczna + warstwa
elewacyjna,
4) warstwa konstrukcyjna + izolacja termiczna + warstwa elewacyjna
.
77. Proszę wskazać właściwy układ warstw w przekroju poprzecznym
stropodachu stromego (od wnętrza na zewnętrz):
1) okładzina wewnętrzna + paroizolacja + konstrukcja dachu z izolacją
termiczną + wiatroizolacja + pokrycie dachowe,
2) konstrukcja dachu + izolacja termiczna + pokrycie dachowe,
3) okładzina wewnętrzna + paroizolacja + konstrukcja dachu + wiatroizolacja +
pokrycie dachowe,
4) okładzina wewnętrzna + paroizolacja + konstrukcja dachu z izolacją termiczną +
pokrycie dachowe.
104
®®
Wyszukiwarka
Podobne podstrony:
Egzamin inżynierski 2012 2013 pytania i odpowiedzi
Pedagogika społeczna, Egzamin - zagadnienia, Pedagogika społeczna-pytania i odpowiedzi na egzamin
egzamin awf 2012-2013, TiR AGH, Semestr I, Podstawy Turystyki
Egzamin z TB 2012 2013, Bezpieczeństwo narodowe - UAM Poznań, I rok (2012-2013), Teoria Bezpieczeńst
2012&2013 pytania ChemiaFizyczna wersja30id 27678
PYTANIA II STOPIEŃ OTŻ, Studia SGGW, WNoŻ Magisterskie 2012-2013, Sem III 2012-2013, pytania na obro
JSkomial Tematy egzaminacyjne z doktryn 2012 2013 polityka spoleczna, administracja publiczna-ćw, Do
Zakres egzaminu dyplomowego 2012-2013, Zarządzanie PWR, II stopień
notatek pl egzamin z podstaw zarzadzania najczestsze pytania z odpowiedziami
probny egzamin gimnazjalny 2012 wos historia odpowiedzi
WMN ZIP egzamin inzynierski pytania 2012-2013
Fizjologia pytania do egzaminu 2012 2013 poprawione
zadanie-z-zakresu-prawa-administracyjnego-na-egzamin-radcowski-31.08.2012-r , EGZAMIN RADCOWSKI - py
zadanie-z-zakresu-prawa-gospodarczego-na-egzamin-radcowski-31.08.2012-r , EGZAMIN RADCOWSKI - pytani
egzamin radcowski - 2012 r, EGZAMIN RADCOWSKI - pytania, odpowiedzi, rozwiązania, egzamin radcowski
zadanie-z-zakresu-prawa-karnego-na-egzamin-radcowski-29.08.2012-r , EGZAMIN RADCOWSKI - pytania, odp
dietetyka pytania, Dietetyka 2012,2013, Dietetyka wieku dojrzałego, egzamin
więcej podobnych podstron