„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Paweł Wawrzyniak
Określanie konstrukcji wybranych urządzeń precyzyjnych
731[01].Z2.03
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
prof. dr hab. inż. Krzysztof Pacholski
dr inż. Edward Tyburcy
Opracowanie redakcyjne:
mgr inż. Paweł Wawrzyniak
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 731[01].Z2.03
„Określanie konstrukcji wybranych urządzeń precyzyjnych”, zawartego w modułowym
programie nauczania dla zawodu mechanik automatyki przemysłowej i urządzeń
precyzyjnych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
Wprowadzenie
3
2.
Wymagania wstępne
5
3.
CC Cele kształcenia
6
4.
Materiał nauczania
7
4.1. Mierniki analogowe
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
16
4.1.3. Ćwiczenia
16
4.1.4. Sprawdzian postępów
17
4.2. Manometry
18
4.2.1. Materiał nauczania
18
4.2.2. Pytania sprawdzające
24
4.2.3. Ćwiczenia
24
4.2.4. Sprawdzian postępów
26
4.3. Rejestratory
27
4.3.1. Materiał nauczania
27
4.3.2. Pytania sprawdzające
33
4.3.3. Ćwiczenia
33
4.3.4. Sprawdzian postępów
34
4.4. Plotery
35
4.4.1. Materiał nauczania
35
4.4.2. Pytania sprawdzające
38
4.4.3. Ćwiczenia
39
4.4.4. Sprawdzian postępów
40
4.5. Wagi i kasy fiskalne
41
4.5.1. Materiał nauczania
41
4.5.2. Pytania sprawdzające
47
4.5.3. Ćwiczenia
47
4.5.4. Sprawdzian postępów
50
4.6. Sprzęt gospodarstwa domowego
51
4.6.1. Materiał nauczania
51
4.6.2. Pytania sprawdzające
62
4.6.3. Ćwiczenia
62
4.6.4. Sprawdzian postępów
64
4.7. Przekładnie
65
4.7.1. Materiał nauczania
65
4.7.2. Pytania sprawdzające
70
4.7.3. Ćwiczenia
71
4.7.4. Sprawdzian postępów
72
4.8. Dźwignice i przenośniki
73
4.8.1. Materiał nauczania
73
4.8.2. Pytania sprawdzające
78
4.8.3. Ćwiczenia
78
4.8.4. Sprawdzian postępów
79
5.
Sprawdzian osiągnięć
80
6.
Literatura
85

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten pomoże Ci przyswajać wiedzy z zakresu budowy urządzeń precyzyjnych.
Zamieszczone są w nim:
—
wymagania wstępne – wykaz umiejętności, jakie powinieneś „opanowane” przed
przystąpieniem do nauki,
—
cele kształcenia, jakie powinieneś osiągnąć w czasie zajęć edukacyjnych tej jednostki
modułowej,
—
materiał nauczania – wiadomości niezbędne do osiągnięcia założonych celów kształcenia
i opanowania umiejętności zawartych w jednostce modułowej,
—
zestawy pytań, które pomogą Ci w sprawdzeniu czy opanowałeś nauczany materiału,
—
ćwiczenia, które pomagają Ci na weryfikację wiadomości teoretycznych, kształtowanie
i doskonalenie umiejętności praktycznych,
—
sprawdzian postępów,
—
sprawdzian osiągnięć, przykładowy zestaw pytań – pozytywne zaliczenie testu
potwierdzi opanowanie materiału całej jednostki modułowej,
—
wykaz literatury.
W rozdziale 4 Materiał nauczania przedstawiono podstawowe wiadomości z budowy,
działania i obsługi urządzeń uzupełnionych ilustracjami sprzętu. Każda część tego rozdziału
ma podrozdział Pytania sprawdzające, w którym zamieszczone są różne pytania, pozwalające
Ci samemu sprawdzić stopień opanowania materiału nauczania Z zawartymi tam pytaniami
możesz zapoznać się:
a) przed przystąpieniem do rozdziału Materiał nauczania – poznając przy tej okazji
wymagania wynikające z potrzeby zawodu, lub przyswojeniu wskazanych treści,
odpowiadając na te pytania sprawdzisz stan gotowości do wykonywanych ćwiczeń,
b) po zapoznaniu się z rozdziałem Materiał nauczania, aby sprawdzić stan swojej wiedzy,
która będzie Ci potrzebna do wykonywania ćwiczeń.
Wykonując ćwiczenia zawarte w Poradniku lub zaproponowane przez nauczyciela
poznasz zasady budowy, działania i podstaw uruchamiania wybranych urządzeń
precyzyjnych. Po wykonaniu ćwiczeń sprawdź poziom swoich postępów rozwiązując test
Sprawdzian postępów, zamieszczony po ćwiczeniach. W tym celu:
—
przeczytaj pytania i odpowiedz na nie,
—
podaj odpowiedź wstawiając X w odpowiednie miejsce.
Odpowiedź NIE wskazuje na luki w Twojej wiedzy, informuje Cię również o brakach
w przyswajanej przez Ciebie wiedzy. Oznacza to powrót do treści, które nie są dostatecznie
opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości na temat budowy,
działania wybranych urządzeń precyzyjnych, będzie podstawą do przeprowadzenia przez
nauczyciela sprawdzianu poziomu przyswajanych wiadomości i ukształtowaniu umiejętności.
W rozdziale 5 tego poradnika jest zamieszczony „Sprawdzian osiągnięć”, zawiera on:
—
instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu,
—
zestaw zadań testowych,
—
przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach zaznacz
odpowiedź na pytania.
Będzie to stanowić dla Ciebie trening przed sprawdzianem zaplanowanym przez
nauczyciela.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
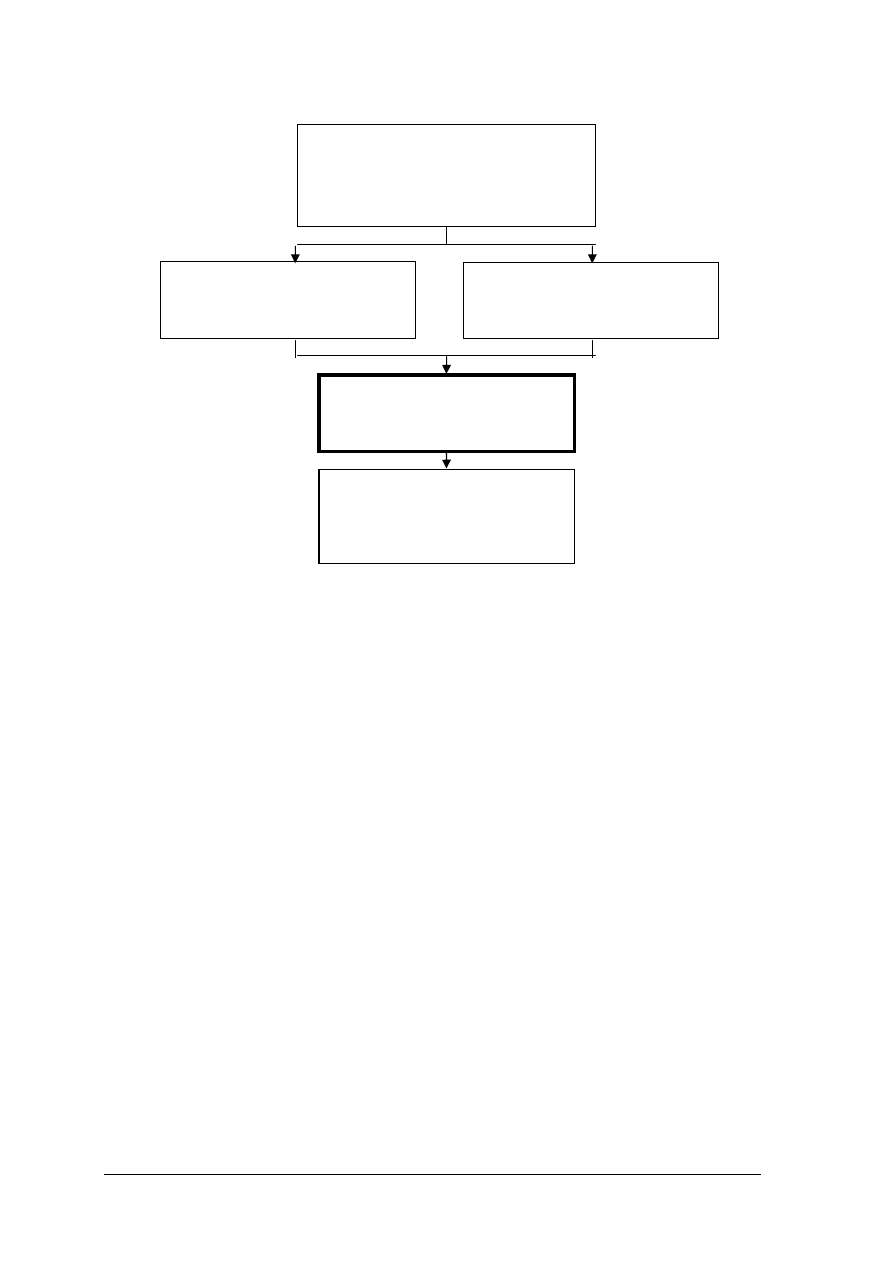
Schemat układu jednostek modułowych
731[01].Z2
Układy automatyki przemysłowej
i urządzenia precyzyjne
731[01].Z2.01
Uruchamianie przetworników
i regulatorów
731[01].Z2.02
Obsługiwanie zespołów napędowych
i nastawczych
731[01].Z2.04
Stosowanie elementów sterowania
i zabezpieczeń w urządzeniach
precyzyjnych
731[01].Z2.03
Określanie konstrukcji wybranych
urządzeń precyzyjnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
—
korzystać z różnych źródeł informacji,
—
stosować jednostki układu SI,
—
przeliczać jednostki,
—
wykonywać wykresy funkcji,
—
posługiwać się komputerem,
—
stosować symbole elektrycznych elementów stykowych,
—
stosować symbole elementów automatyki,
—
podłączać aparaturę kontrolno – pomiarową elektryczną i mechaniczną,
—
dobierać zakresy pomiarowe mierników elektrycznych, manometrów i innych,
—
określać znaczenie członów automatyki,
—
stosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska,
—
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
—
wyjaśnić konstrukcje ustrojów pomiarowych elektrycznych mierników analogowych,
—
opisać budowę i uruchomić różne typy rejestratorów,
—
opisać budowę, uruchomić ploter i wygenerować rysunek,
—
wyjaśnić działanie mechanizmu kasy fiskalnej,
—
wyjaśnić budowę i działanie wag laboratoryjnych i sklepowych,
—
wyjaśnić działanie mechanizmów zegarowych,
—
rozróżnić rodzaje przekładni stosowane w mechanizmach precyzyjnych,
—
scharakteryzować falową przekładnię robotową,
—
wyjaśnić działanie maszyny do szycia,
—
wyjaśnić budowę i działanie lodówki, pralki automatycznej, odkurzacza, kuchenki
mikrofalowej,
—
określić rolę i znaczenie mechanizmów taśmowych w procesach transportu,
—
skorzystać z instrukcji obsługi sprzętu gospodarstwa domowego,
—
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
i ochrony środowiska.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Mierniki analogowe
4.1.1. Materiał nauczania
Miernik analogowy, to taki przyrząd pomiarowy, który mierzoną wartość wskazuje
analogowo (w sposób ciągły, a nie skokowy). W takim mierniku, mechaniczna wskazówka
zatrzymując się w określonym miejscu skali wskazuje wartość mierzonej wielkości. Składa
się on z ustroju pomiarowego i układu pomiarowego. Ustrój pomiarowy jest to część
elektromechaniczna miernika, natomiast układ pomiarowy to część elektryczna (lub
elektroniczna) dopasowująca wielkość natężenia prądu do żądanej wielkości. Obecnie,
najczęściej stosowanymi są ustroje magnetoelektryczny i elektromagnetyczny. W skład
każdego ustroju pomiarowego wchodzi organ ruchomy i organ nieruchomy. Budowa organu
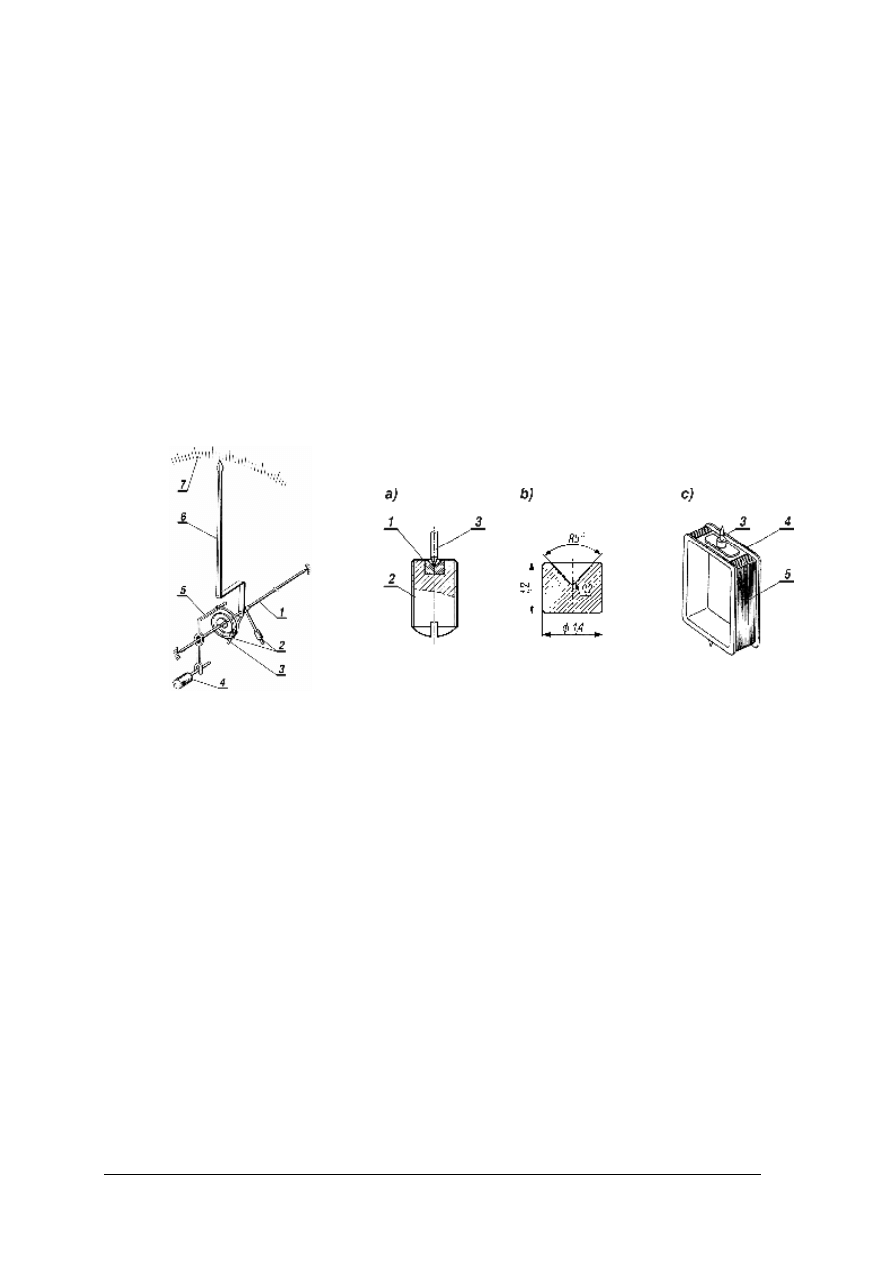
ruchomego, w pewnym uproszczeniu, przedstawiona została na rys. 1.
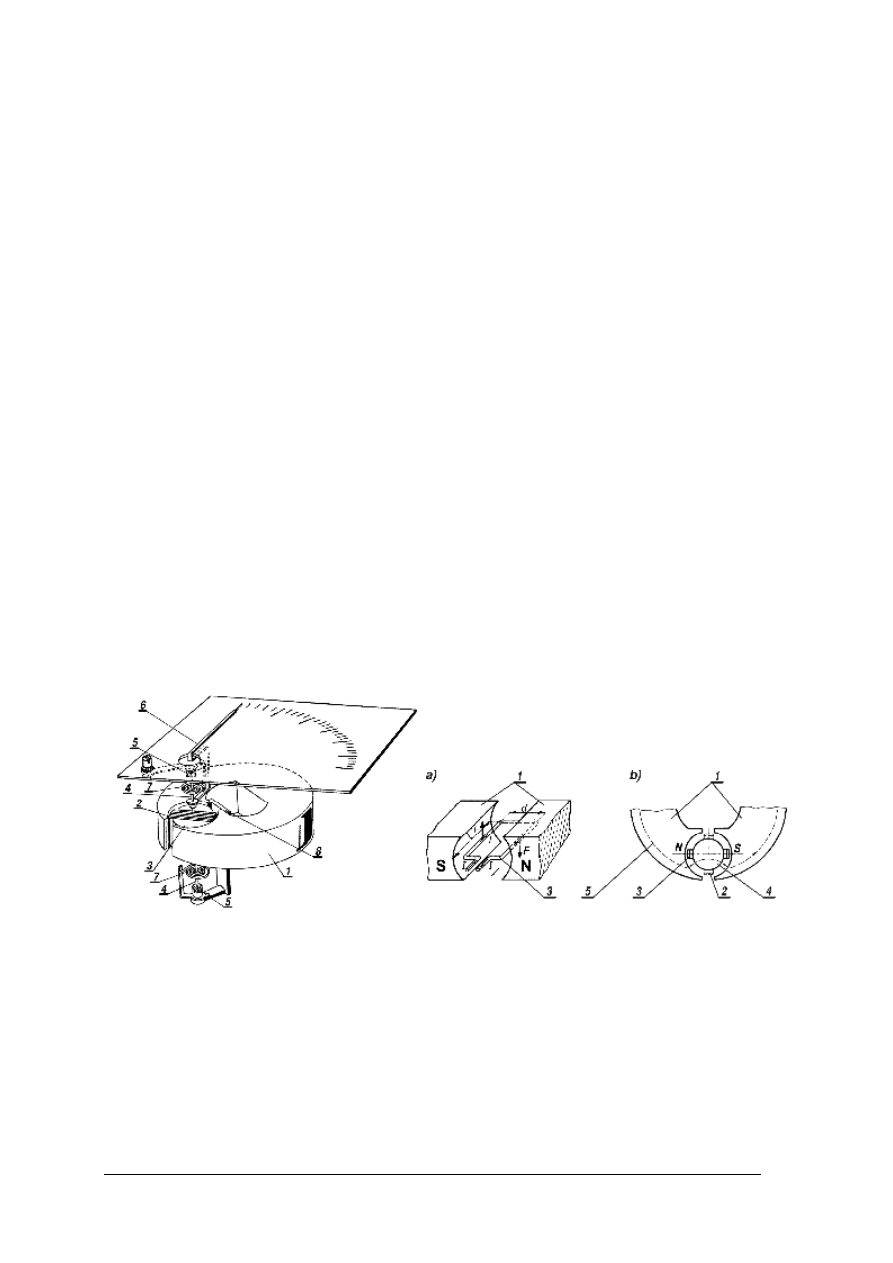
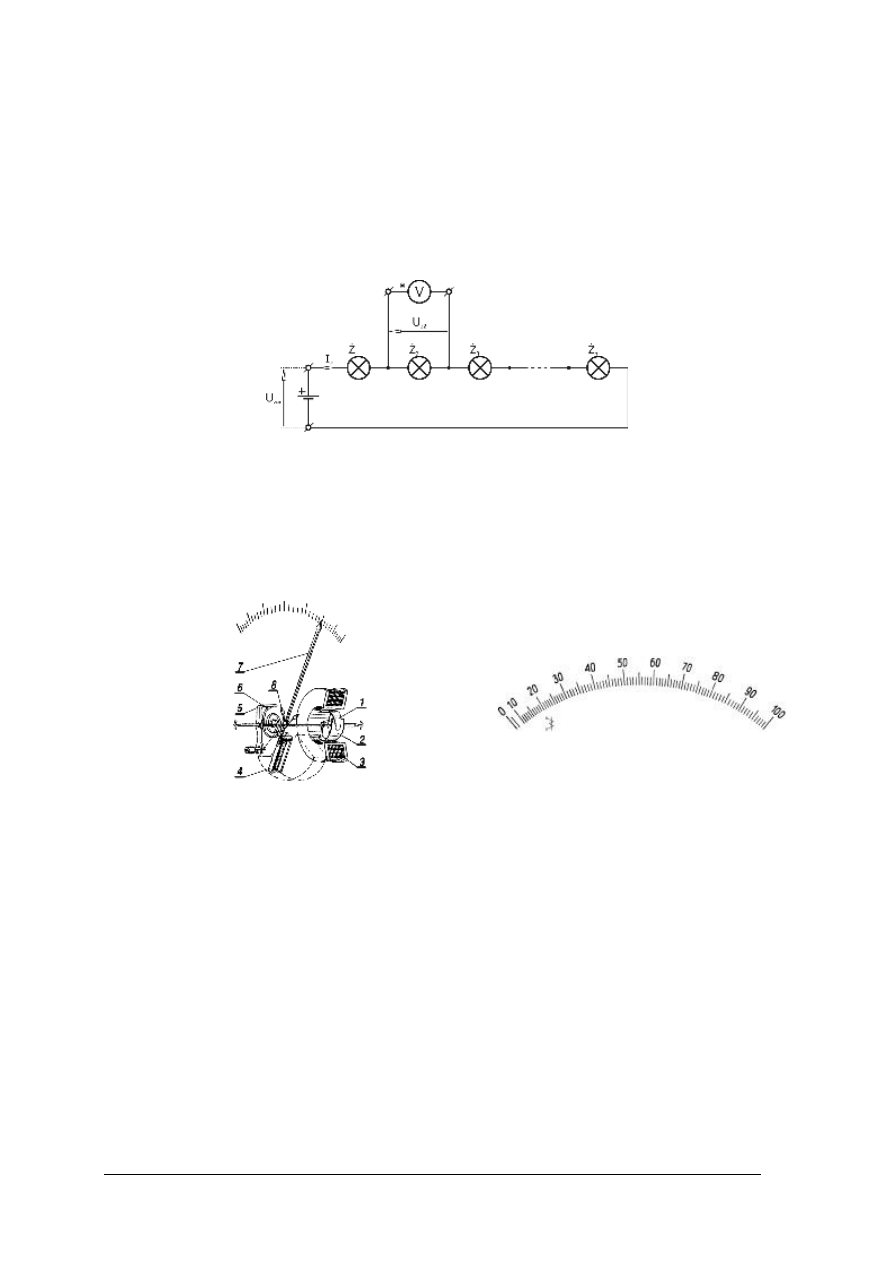
Rys. 1.
Budowa organu ruchomego: 1 – oś,
2 – ciężarki, 3 – sprężynka
powrotna, 4 – korektor położenia
zerowego, 5 – trzymak sprężyny,
6 – wskazówka, 7 – podziałka
[7, s. 34]
Rys. 2. Elementy zawieszenia cewki: a) elementy łożyska
ślizgowego,
b)
nieruchoma
panewka
łożyska
z syntetycznego szafiru, c) cewka ruchoma:
1 – panewka ze szafiru, 2 – śruba łożyskowa z panewką
szafirową, 3 – czop osi, 4 – korpus, 5 – uzwojenie
[7, s. 56, 57]
Oś spełnia rolę zarówno konstrukcji nośnej całego organu ruchomego, jak
i precyzyjnego, wprowadzającego jak najmniejsze opory, mechanizmu obrotowego.
Wykonywana jest ona z hartowanej stali w całości lub też często jako dwie osobne części
(często od siebie izolowane). Końcówkami osi są czopy zakończone stożkowo. Sam
wierzchołek stożka jest zaokrąglony, a jego średnica wynosi od 0,3 do 1 mm.
Sprężynka powrotna – najczęściej są to dwie sprężynki – znajdują się przy obu końcach
osi. Wykonane są w postaci spirali Archimedesa ze stopów niemagnetycznych takich jak brąz
berylowy, brąz krzemowy lub brąz cynowy. Wykonanie jej jest dość ważne, ponieważ musi
on wytwarzać liniowo narastający moment hamujący, który ma być niezmienny i nie
wrażliwy na wpływy temperaturowe, upływ czasu itp.
Końcówki osi (czopy) zamocowane są w łożyskach ślizgowych. Łożyska te wykonywane
są z syntetycznego szafiru (lub agatu). Samo łożysko jest osadzane najczęściej w śrubie
dociskowej. Dla poprawnej pracy łożysko musi mieć odpowiednie wymiary. Wzajemne
dopasowanie czopu i panewki łożyska, ich wzajemne położenie, przedstawione jest na rys. 2a.
Nieruchoma panewka ze sztucznego szafiru (z wymiarami) pokazana jest na rys. 2b.
W mierniku, w jego łożysku obraca się cewka – właściwie jej oś. Budowę cewki
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
przedstawia rys. 2c. Cewka nawinięta jest w postaci prostokątnego uzwojenia (5) z cienkiego
izolowanego przewodu miedzianego na korpusie (4), wzmacniającym konstrukcję
mechanicznie, a jej końce podłączone są z częścią nieruchomą za pośrednictwem sprężynek
powrotnych. Do cewek przyklejone są wsporniki z metalu o małej przenikalności
magnetycznej lub z innego materiału diamagnetycznego (np. tworzywa sztucznego),
połączone z osią.
Mierniki analogowe mogą mieć różne ustroje pomiarowe – w praktyce najczęściej
spotykane są teraz mierniki zbudowane w oparciu o jeden z następujących ustrojów
pomiarowych: magnetoelektryczne, elektromagnetyczne i elektrodynamiczne. Istnieją
również inne ustroje pomiarowe, ale są najbardziej popularne. Wszystkie ustroje pomiarowe
wykorzystują prawa i zjawiska rządzące przewodnikami, przez które płyną prądy elektryczne
i znajdują się w polu magnetycznym.
Jednym z najczęściej stosowanych ustrojów pomiarowych, we wszystkich miernikach,
jest
ustrój
magnetoelektryczny
mierzący
prąd
stały.
Konstrukcja
ustroju
magnetoelektrycznego przedstawiona jest na rys. 3. Częściami ruchomymi są: cewka, oś,
sprężyny powrotne i wskazówka. Części nieruchome to: magnes trwały, rdzeń cewki
ruchomej, bocznik magnetyczny, łożyska ślizgowe oraz tabliczka ze skalą pomiarową.
Oprócz części przedstawionych na tym rysunku w skład każdego miernika wchodzi układ
pomiarowy i obudowa (jako element spełniający zarówno funkcję ochrony zewnętrznej oraz
będący jednocześnie konstrukcją nośną).
Kompletny organ ruchomy ustroju pomiarowego (cewka z czopami i sprężynkami)
porusza się wokół osi obrotu. Oś obrotu cewki pokrywa się z osią symetrii
ferromagnetycznego rdzenia (wykonanego w kształcie walca), znajdującego się pomiędzy
dwoma nabiegunnikami magnesu trwałego i tworzącego między nimi wąską szczelinę.
Przewody obracającej się cewki przesuwają się w tej szczelinie. Szczelina jest tak wąska, że
pole magnetyczne w niej jest zawsze prostopadłe to powierzchni nabiegunników i rdzenia.
Inaczej określając znaczy to, że linie sił pola magnetycznego wewnątrz szczeliny pokrywają
się z liniami prostymi prostopadłymi do osi symetrii rdzenia (rys. 4).
Rys. 3. Budowa ustroju magnetoelektrycznego:
1 – magnes trwały, 2 – ruchoma cewka,
3 – rdzeń cewki, 4 – czop osi, 5 – łożysko,
6 – wskazówka, 7 – sprężyna, 8 – bocznik
magnetyczny [7, s. 52]
Rys. 4. Ustrój magnetoelektryczny: a) działanie sił,
b) obracanie cewki: 1 – bieguny magnesu
trwałego, 2 – ruchoma cewka ustroju
w położeniu pionowym, 3 – ruchoma cewka
ustroju w położeniu poziomym, 4 – rdzeń
ferromagnetyczny. 5 – jedna z linii sił pola
magnetycznego [7, s. 54, 55]
Po doprowadzeniu, do końców cewki (poprzez sprężynki) napięcia U, popłynie przez nią
prąd elektryczny I, który wytwarza siłę elektrodynamiczną F działającą na przewody cewki
znajdujące się w polu magnetycznym szczeliny powietrznej (rys. 4a). Powstająca siła
elektrodynamiczna F, wywołuje obrót cewki o kąt proporcjonalny do natężenia
przepływającego prądu zgodnie ze wzorem:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
z
l
I
B
=
F
⋅
⋅
⋅
gdzie:
F
– siła elektrodynamiczna,
B – indukcja magnetyczna,
I
– natężenia prądu elektrycznego przepływającego przez cewkę,
l
– długość przewodów elektrycznych cewki objętej polem magnetycznym szczeliny,
z
– liczba zwojów cewki.
Tak długo, jak części czynne przewodów cewki znajdują się w szczelinie powietrznej,
to zależność wytwarzanej siły elektrodynamicznej jest liniowo zależna od natężenia prądu
przepływającego przez cewkę. W praktyce najczęściej jest tak, że kąt obrotu cewki, razem ze
wskazówką, nie przekracza 90°. Na organ ruchomy miernika działają dwie siły. Jedna z nich,
zależna od natężenia prądu I płynącego w cewce wytwarza moment napędowy M
n
, określony
wzorem:
d
z
l
I
B
=
2
d
F
2
=
M
n
⋅
⋅
⋅
⋅
⋅
⋅
.
W zależności tej d jest odległością od siebie dwóch przeciwległych, równoległych do
siebie przewodów uzwojenia, poruszających się w polu magnetycznym szczeliny powietrznej.
Ponieważ w mierniku wymiary cewki są stałe, indukcja magnetyczna B również, długość
czynna przewodów l oraz odległość między nimi d także, to można przyjąć, że:
(c = const.),
a więc, moment napędowy M
n
określony jest przez wzór:
I
c
=
M
n
⋅
.
Momentowi napędowemu, obracającemu cewkę (i wskazówkę razem z nią),
przeciwstawia się moment zwrotny M
z
, wytwarzany przez spiralne sprężynki
i proporcjonalny do kąta obrotu
α
. Określony jest on następującym wzorem:
k
α
=
M
z
⋅
,
gdzie k jest stałym współczynnikiem charakterystycznym dla danych sprężyn i niezmiennym
niezależnie od kąta obrotu
α
, więc w momencie równowagi moment napędowy M
n
równy jest
momentowi zwrotnemu M
z
, a więc wtedy kąt obrotu jest zgodny ze wzorem:
I
k
c
=
α
⋅
.
Współczynniki c i k są stałe, specyficzne dla danego typu ustroju pomiarowego.
Powyższy wzór udowadnia, że kąt obrotu
α
jest wprost proporcjonalny do natężenia prądu
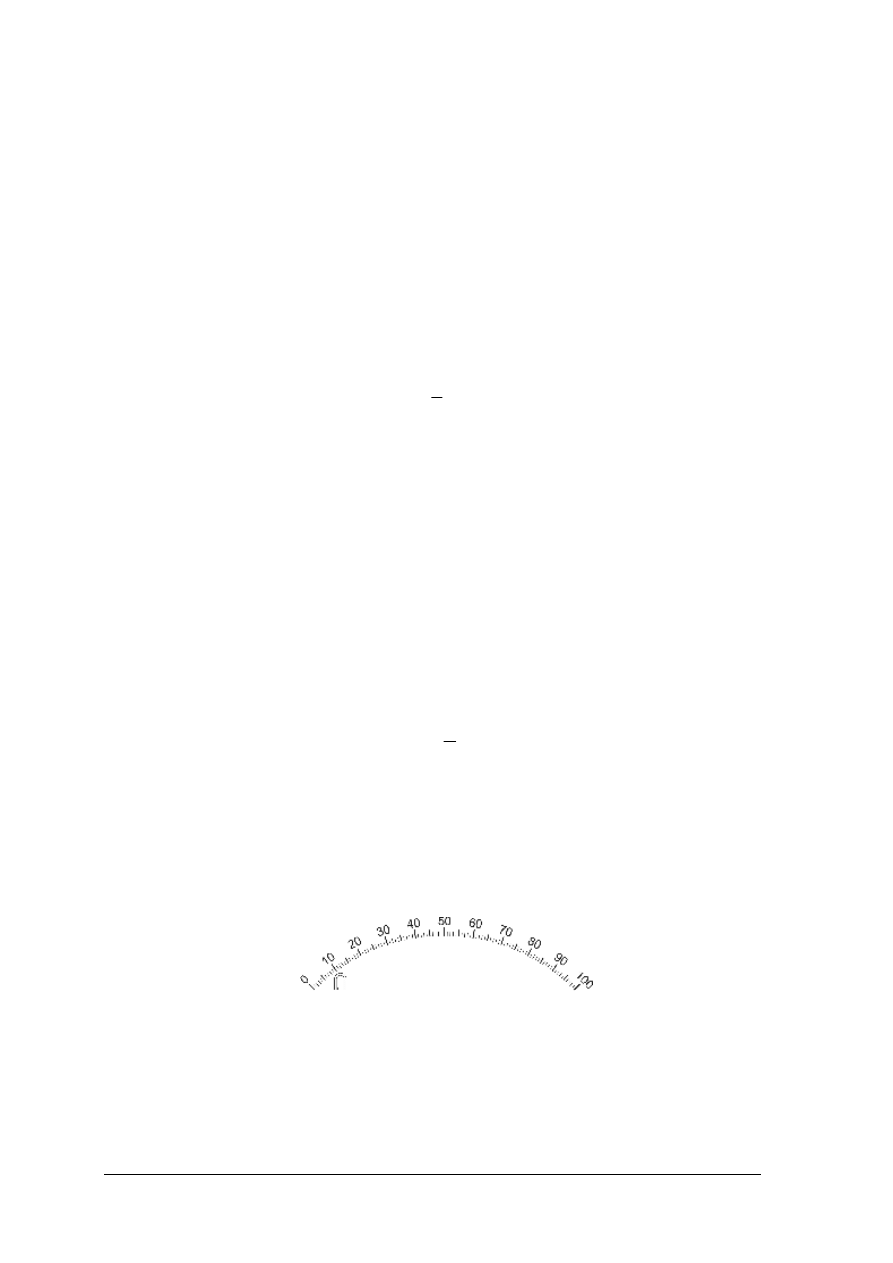
płynącego przez miernik. Podziałka takiego miernika jest równomierna, a przykład takiej
skali jest przedstawiony jest na rys. 5. Każdy miernik z magnetoelektrycznym ustrojem
pomiarowym ma równomierną podziałkę. Niezależnie od tego, do pomiaru której wielkości
służy, to i tak w rzeczywistości mierzy natężenie prądu, a więc jego podziałka jest
równomierna, tylko wyskalowana w jednostkach napięcia (lub innych).
Rys. 5.
Podziałka miernika magnetoelektrycznego i jego oznaczenie symboliczne [opracowanie własne]
Magnetoelektryczne ustroje pomiarowe wykorzystywane są do konstruowania
amperomierzy, woltomierzy, watomierz oraz mierników uniwersalnych.
Amperomierz, z ustrojem magnetoelektrycznym, jest to przyrząd przeznaczony
do pomiaru prądu płynącego w przewodach elektrycznych (lub pobieranego przez odbiornik).
Włączany jest on zawsze szeregowo z takim elementem jak żarówka, cewka itp., czyli
c
=
d
z
l
B
⋅
⋅
⋅
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
szeregowo z odbiornikiem, przez który przepływa mierzony prąd. Jest to podobne, na
przykład, do pomiaru ilości pobieranej wody przez pralkę automatyczną, której ilość mierzy
się wodomierzem. Wodomierz musi być podłączony w taki sposób, aby cała pobierana woda
przepływała przez niego. Podobnie jest z amperomierzem. Aby zmierzyć wartość prądu
przepływającego przez np. żarówkę, to jedna z jej biegunów musi być podłączony do
amperomierza, a drugi wolny biegun żarówki i wolna końcówka amperomierza muszą być
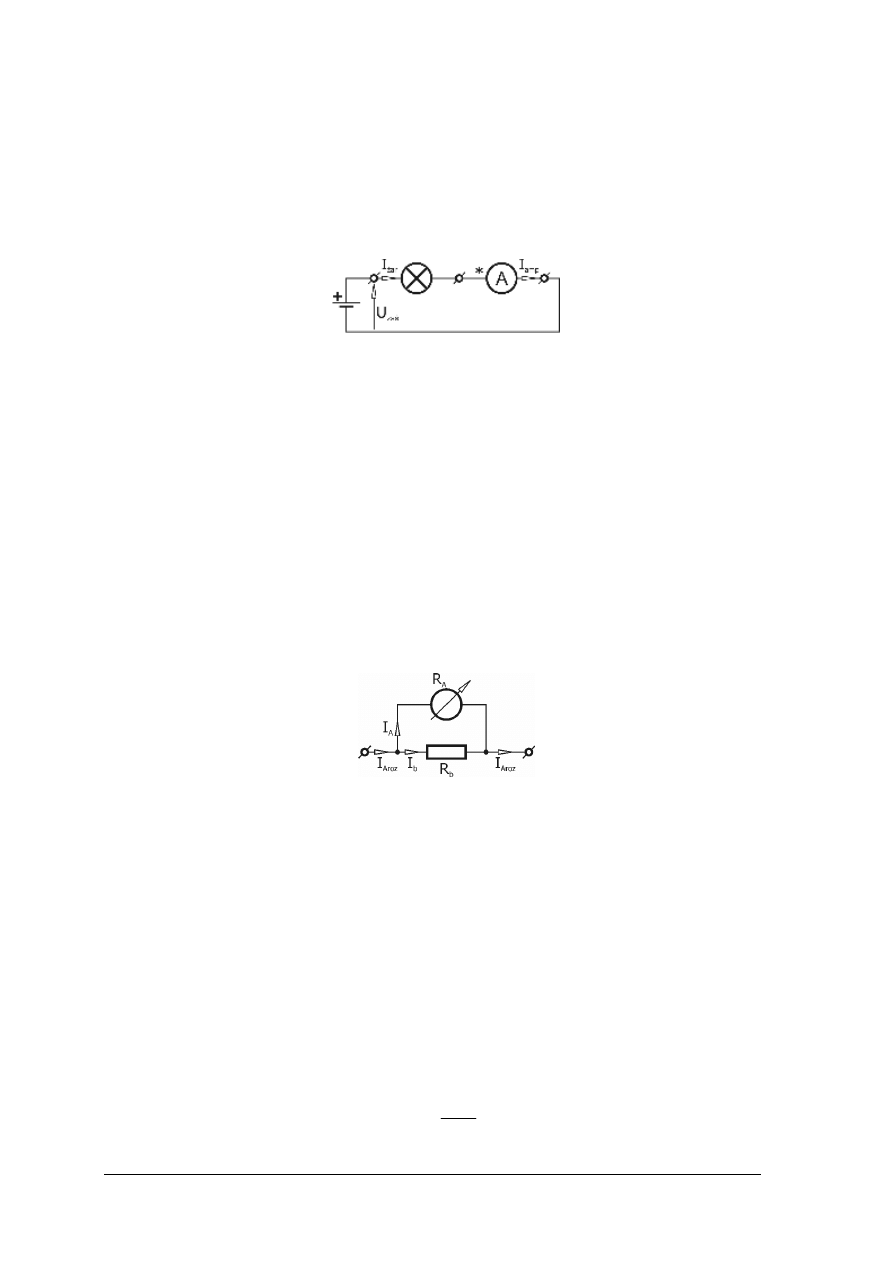
podłączone do źródła energii elektrycznej. Ilustruje to rys. 6.
Rys. 6.
Włączenie amperomierza do przykładowego obwodu (szeregowo) [opracowanie własne]
Prąd I
żar
, płynący przez żarówkę jest taki sam jak prąd płynący przez amperomierz I
amp
.
To jest jeden i ten sam prąd. Na przedstawianym schemacie jedna z końcówek amperomierza
oznaczona jest gwiazdką. W mierniku magnetoelektrycznym prąd musi przepływać od
zacisku oznaczonego gwiazdką (lub „plusem”), do drugiego nieoznaczonego zacisku. Jeżeli
będzie przepływał w odwrotną stronę, to wskazówka będzie „chciała” wychylić się w lewo,
czyli poniżej zera (w niepożądanym kierunku). Gwiazdka oznacza zacisk, którym prąd
elektryczny ma „wpływać do miernika”. Często zacisk ten oznaczany jest kolorem
czerwonym.
Miernik będący amperomierzem musi mieć ustrój pomiarowy odpowiednio dobrany do
wartości mierzonego prądu. Prawie zawsze (z wyjątkiem niektórych przypadków mierników
laboratoryjnych) ustroje są tak czułe, że prądy, które mają mierzyć są kilku–, kilkuset lub
więcej razy większe od prądów znamionowych. Prądy powodujące maksymalne wychylenie
wskazówki są najczęściej rzędu pojedynczych mikroamperów (inne ustroje są mniej czułe –
płyną przez nie dziesiątki lub setki mikroamperów).
Rys. 7.
Schemat zastępczy obwodów elektrycznych amperomierza:
I
A
– znamionowy prąd ustroju pomiarowego, I
Aroz
– prąd zakresu po
rozszerzeniu, I
b
– prąd bocznika, R
A
– rezystancja ustroju pomiarowego
amperomierza, R
b
– rezystancja bocznika [opracowanie własne]
Aby amperomierz mógł mierzyć rzeczywiste prądy płynące w układzie, musi być do tego
dostosowany. Dopasowanie takie nazywa się poszerzaniem zakresu pomiarowego. Aby
miernik mógł mierzyć prąd wielokrotnie przekraczający prąd maksymalnego wychylenia
ustroju pomiarowego, to przez ten ustrój może przepływać tylko pewna jego część.
„Pozostały prąd” musi płynąć inną drogą. W tym celu łączy się równolegle z ustrojem
pomiarowym tzw. „rezystor bocznikujący”, przez który przepływa większa część mierzonego
prądu. Jest to poszerzenie zakresu pomiarowego. Schemat podłączenia takiego bocznika do
części elektrycznej ustroju pomiarowego, pokazano na rys. 7.
Jeżeli organ ruchomy ustroju pomiarowego amperomierza wychyla się maksymalnie przy
prądzie I
A
, a ma on mierzyć prąd do wartości I
Aroz
, to znaczy, że zakres ma być rozszerzony
n razy zgodnie ze wzorem:
A
Aroz
I
I
n
=
.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Jeśli rezystancja ustroju pomiarowego wynosi R
A
, to trzeba równolegle do niej dołączyć
bocznik o rezystancji R
b
, określony wzorem:
1
n
R
R
A
b
−
=
.
W ten sposób zawsze poszerzane są zakresy pomiarowe każdego amperomierza.
Wyposażając amperomierz w kilka boczników oraz ich przełącznik tworzona jest konstrukcja
amperomierza wielozakresowego. Podziałki amperomierzy, wykorzystujących ustrój
magnetoelektryczny, są równomierne (tak jak na rys. 5). Wyskalowane są one albo od
0 do 100 działek, albo ilość działek dopasowana jest do zakresu pomiarowego – do ilości
miliamperów (mA) lub amperów (A). Jeżeli amperomierz jest przyrządem wielozakresowym,
to często jest wyposażany w dwie podziałki (lub – jeśli jest to uzasadnione – więcej)
znajdujące się na tej samej tarczy podziałowej.
Woltomierz z ustrojem magnetoelektrycznym jest przyrządem pomiarowym służącym do
pomiarów napięcia prądu stałego, czyli różnicy potencjałów elektrycznych między dwoma
punktami obwodu elektrycznego. Pomiar ten jest wykonywany metodą pośrednią. Pośrednią,
tzn., że miernik mierzy jedną wielkość, a wskazuje wielkość pochodną proporcjonalną
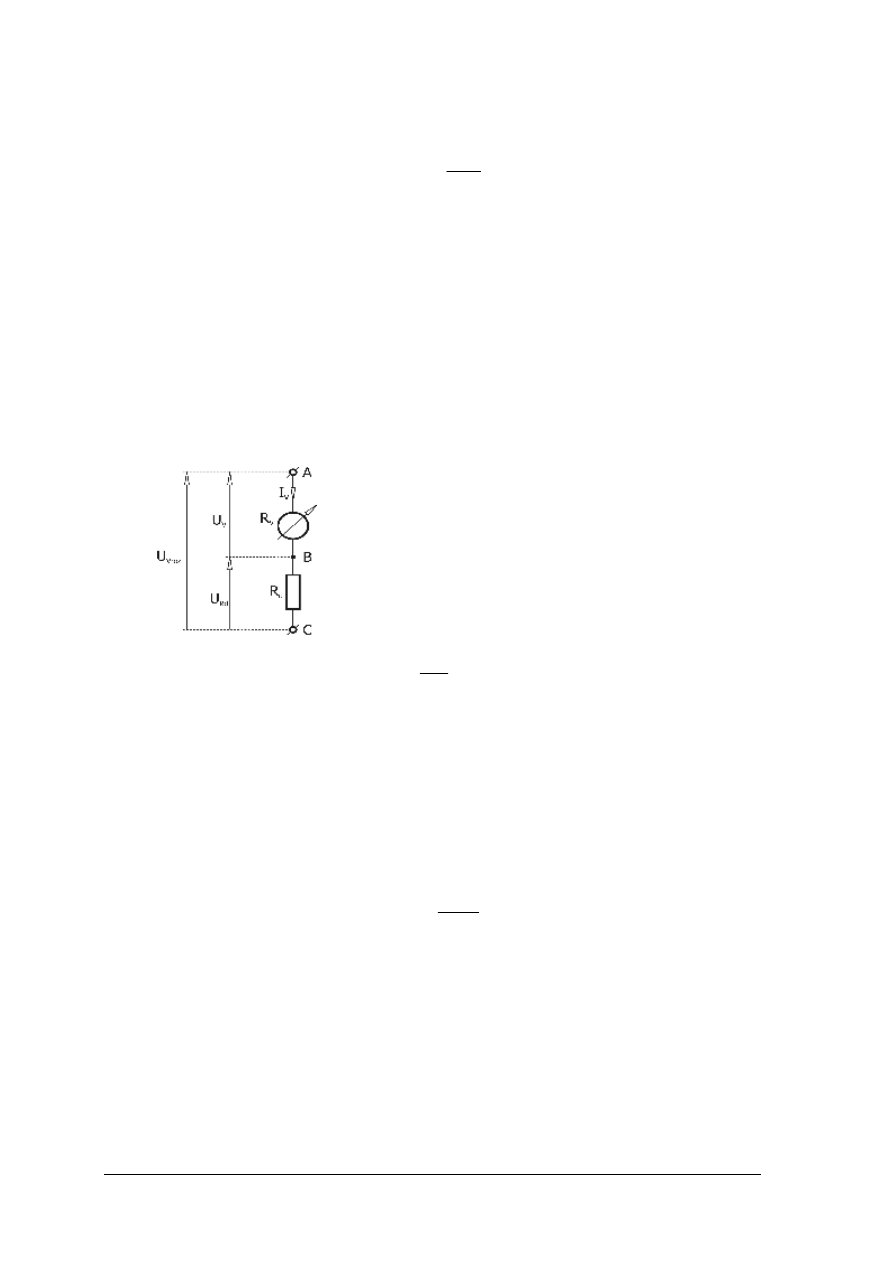
do mierzonej. W wyjaśnianiu tego pomaga rys. 8
Obwód elektryczny przedstawionego woltomierza
składa się z rezystancji wewnętrznej R
V
oraz rezystancji
dodatkowego rezystora dopasowującego R
d
, które
połączone są ze sobą szeregowo. Po podłączeniu tego
woltomierza
do
elementu,
znajdującego
się
w dowolnym obwodzie elektrycznym pod napięciem,
pomiędzy zaciskami A i C wystąpi różnica potencjałów,
więc przez miernik popłynie prąd I
V
. Prąd ten jest
proporcjonalny do napięcia – zgodnie z prawem Ohma:
V
V
V
R
U
=
I
, a więc można wyznaczyć
V
V
V
R
I
U
⋅
=
Na podstawie tych zależności można stwierdzić,
że ustrojowi pomiarowemu mierzącemu natężenie
prądu I
V
, można dobrać odpowiedni rezystor R
d
obliczając jego rezystancję i wyskalować
podziałkę w woltach, aby otrzymać przyrząd do pomiaru napięcia. Taki przyrząd nazywany
jest woltomierzem. Dobór odpowiedniego rezystora R
d
wykonuje się stosując sposób zwany
poszerzaniem zakresu woltomierza. Jeżeli pełne wychylenie wskazówki woltomierza
następuje przy pewnym napięciu U
V
, a konieczne jest rozszerzenie tego zakresu do U
Vroz
, to
prawdziwa jest zależność określająca ile razy nowy zakres jest większy od zakresu samego
ustroju pomiarowego:
V
Vroz
U
U
=
n
,
będącego krotnością rozszerzania zakresu n. Wtedy rezystancja R
d
podłączanego rezystora,
nazywanego posobnikiem określana jest poniższą zależnością:
(
)
1
n
R
R
V
d
−
⋅
=
.
Podobnie, jak z amperomierzem ustrój pomiarowy woltomierza można wyposażyć
w szereg różnych posobników i przełącznik włączający w obwód tylko jeden z nich.
Powstanie w ten sposób woltomierz wielozakresowy.
Przedstawione wzory udowadniają, że mierzone napięcie jest zależne liniowo od prądu
przepływającego przez cewkę ustroju pomiarowego, a więc podziałka takiego miernika
będzie równomierna. Podziałka taka może być wyskalowana uniwersalnie, czyli mieć 100
działek (rys. 5) dla każdego zakresu albo ilość działek może być dopasowana do zakresu (3 V
Rys. 8. Schemat zastępczy obwodów
elektrycznych woltomierza: I
V
– prąd
przepływający przez cewkę woltomierza,
R
V
– rezystancja wewnętrzna woltomierza
[opracowanie własne]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
– 30 działek, 15 V – 150 działek itd.).
Woltomierz należy zawsze włączać równolegle. Jest to sposób podobny do tego, jaki
stosuje się podczas pomiaru np. długości obrabianego detalu na tokarce. Suwmiarkę wtedy
przykłada się do przedmiotu z boku, czyli równolegle do obrabianego materiału. Podobnie
jest z napięciem elektrycznym. Mierząc je sprawdza się, jakie jest napięcie pomiędzy
końcówkami np. żaróweczki choinkowej (zawsze są one łączone ze sobą szeregowo).
Na rys. 9 pokazane są połączone szeregowo ze sobą żaróweczki (np. żaróweczki choinkowe).
Przez wszystkie żaróweczki płynie ten sam prąd I
o
.
Rys. 9.
Włączanie woltomierza w przykładowym obwodzie – zawsze
równolegle do odbiornika, na którym mierzone jest napięcie
[opracowanie własne]
Jeżeli trzeba zmierzyć napięcie na żaróweczce nr 2, to końcówki woltomierza trzeba
połączyć z zaciskami tej żaróweczki, równolegle z tą żaróweczką. Jednocześnie trzeba
zwrócić uwagę na zacisk woltomierza oznaczony gwiazdką. Trzeba go włączyć tak, aby
„wskazywał kierunek do plusa” źródła zasilającego.
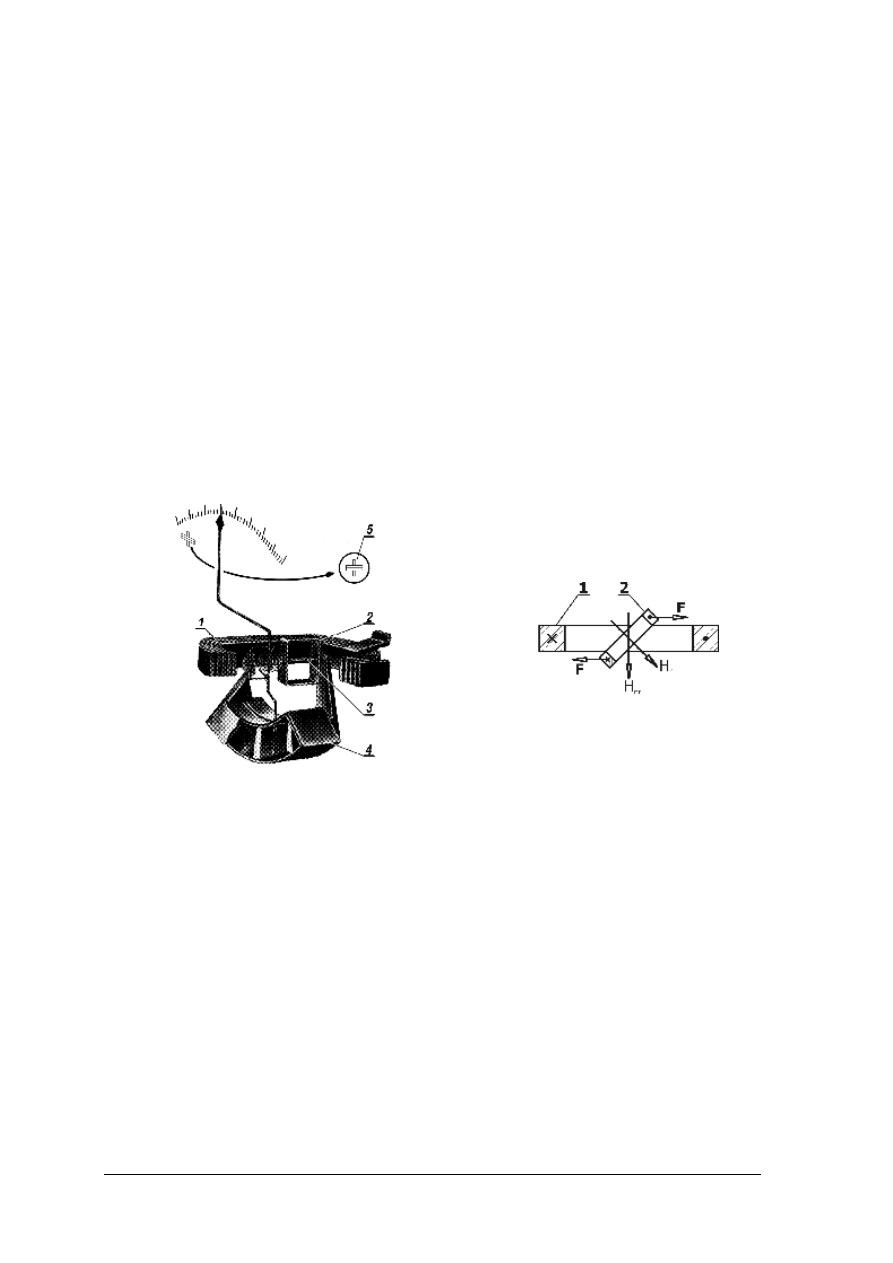
Rys.
10.
Budowa
ustroju
elektromagnetycznego
dwurdzeniowego: 1 – rdzeń nieruchomy,
2 – rdzeń ruchomy, 3 – cewka, 4 – skrzydełko
tłumika, 5 – trzymak sprężyny i korektor zera,
6 – sprężyna, 7 – wskazówka, 8 – jeden
z ciężarków [7, s. 87]
Rys. 11. Podziałka (przykład) miernika
elektromagnetycznego
–z oznaczeniem symbolicznym
ustroju [7, s. 89]
Mierniki mogą mieć także inne ustroje pomiarowe. Jednym z nich może być ustrój
elektromagnetyczny (rys. 10). Elementami ruchomymi w tym ustroju są: rdzeń
ferromagnetyczny, oś, sprężynki, wskazówka i elementy pomocnicze. Elementy nieruchome,
w tym ustroju, to: łożyska (tutaj zaznaczone tylko schematycznie), cewka, obudowa tłumika
powietrznego oraz wszelkie pozostałe elementy układy pomiarowego.
W ustroju elektromagnetycznym cewka, wytwarzająca pole magnetyczne, które wciąga
rdzeń ferromagnetyczny, jest nieruchoma. Porusza się natomiast rdzeń. Wewnątrz cewki,
przez którą płynie prąd elektryczny, wytwarzane jest pole magnetyczne. Każde pole
magnetyczne przyciąga ciała ferromagnetyczne. Od natężenia prądu elektrycznego
przepływającego przez cewkę zależy natężenie pola magnetycznego wytwarzanego wewnątrz
niej, a od niego zależy siła przyciągająca rdzeń. Jednak trzeba zauważyć, że w tym przypadku
zależność wytwarzanego momentu napędowego M
n
od płynącego prądu nie jest liniowa, to
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
podziałka takiego miernika nie będzie równomierna. Przy odpowiednim wykonaniu rdzenia
(pod względem jego kształtu i rodzaju materiału) można uzyskać pewne zbliżenie do
podziałki równomiernej (przykład takiej podziałki jest na rys. 11).
Ustrój elektromagnetyczny najczęściej stosowany jest do konstruowania amperomierzy
i woltomierzy przeznaczonych do pomiarów w obwodach prądu przemiennego – najczęściej
w przemysłowej sieci energetycznej. Spowodowane jest to tym, że siła wciągająca rdzeń
ferromagnetyczny do wnętrza cewki jest niezależna od kierunku przepływu prądu przez nią.
Miernikami elektromagnetycznymi można mierzyć prąd i napięcie zarówno dla prądu
przemiennego, jak i stałego. Jednak przy pomiarach w obwodach prądu stałego dokładność
pomiaru jest nieznacznie gorsza, ponieważ rdzeń ferromagnetyczny magnesuje się, a to
pogarsza dokładność pomiaru. Przy pomiarach prądu przemiennego magnesowanie rdzeni nie
występuje, ponieważ prąd płynie w obu kierunkach i rdzeń jest przemagnesowywany, więc
nie pogarsza dokładności pomiaru.
Miernik elektrodynamiczny, to taki przyrząd, którego działanie opiera się na wzajemnym
oddziaływaniu dwóch pól magnetycznych wytworzonych przez przepływ prądu
elektrycznego w uzwojeniach cewki nieruchomej i cewki ruchomej. Budowa tego ustroju
pomiarowego przedstawiona jest na rys. 12. Organ ruchomy w tym przypadku jest prawie
identyczny jak w ustroju magnetoelektrycznym: jest oś, do której przymocowana jest cewka
wykonana bardzo podobnie jak na rys. 2c.
Rys. 12. Budowa ustroju elektrodynamicznego: 1 – cewka
nieruchoma, 2 – cewka ruchoma, 3 – oś cewki
ruchomej, 4 – tłumik drgań organu ruchomego,
5 – symbol ustroju [7, s. 97].
Rys. 13. Działanie ustroju elektrodynamicznego:
1– cewka nieruchoma, 2– cewka ruchoma
[7, s. 97].
Oś ta nie jest dzielona, ponieważ wewnątrz cewki nie ma żadnego rdzenia. Organ
nieruchomy natomiast jest odmienny od tego z miernika magnetoelektrycznego. Jest on
podobny do organu nieruchomego w ustroju elektromagnetycznym. Jego podstawowym
elementem jest uzwojenie wykonane z grubego przewodu (uzwojenie nie porusza się, więc
nie ma żadnych przeszkód by takie było i stawiało jak najmniejszy opór przepływowi prądu).
Zasada działania tego ustroju przedstawiona jest na rys. 13. W położeniu spoczynkowym,
cewka nieruchoma jest oczywiście poziomo, a cewka ruchoma jest prostopadła do
nieruchomej. Podczas przepływu prądów przez obie cewki, wytwarzają one pola
magnetyczne: cewka nieruchoma pole o natężeniu H
nr
, a cewka ruchoma H
r
. Pola wzajemnie
na siebie oddziałują, dążąc do tego, aby ich linie sił były do siebie równoległe – co jest
równoznaczne z tym, że wektory natężeń pól są również do siebie równoległe. Ponieważ
większa cewka nie może się poruszać, a pola dążą do wyrównania swych linii sił, to powstaje
siła F obracającej cewkę 2. Powstawanie tej siły jest niezależne od „kierunków” powstających
pól, a więc niezależne od tego czy oba prądy płyną tak jak zaznaczono to na rysunku, czy oba
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
w strony przeciwne. Wynika z tego, że miernik z takim ustrojem pomiarowym może mierzyć
wielkości elektryczne zarówno w obwodach prądu stałego, jak i w obwodach prądu
zmiennego. Jednak wzajemna zgodność kierunków przepływu prądu w poszczególnych
częściach uzwojeń musi być zachowana. Jeżeli jeden z dwóch prądów zmieni kierunek
przepływu, to wskazówka będzie się wychylać w lewo, a nie w prawo.
Moment napędowy M, powstający w tym ustroju pomiarowym, jest proporcjonalny
do iloczynu prądów obu cewek oraz do zmian indukcyjności wzajemnej obu cewek
wywołanej obrotem cewki ruchomej. W związku z tym, podziałka miernika
elektrodynamicznego nie jest równomierna. Zgodnie z tym podziałka powinna być
rozszerzająca się (tzn. proporcjonalna do kwadratu prądów), ale w rzeczywistych
przyrządach, dobiera się odpowiednio skomplikowane kształty uzwojeń, dzięki którym
można podziałkę zbliżyć do równomiernej.
Ustrój elektrodynamiczny nadaje się do zastosowania zarówno w woltomierzach, jak
i amperomierzach, ale ze względu na jego dość znaczny koszt produkcji, takich mierników
nie spotyka się w praktyce. Natomiast znajduje on zastosowanie w budowie watomierzy.
Watomierz jest przyrządem przeznaczonym do pomiaru mocy prądu elektrycznego.
Z podstaw elektrotechniki wiadomo, że moc danego odbiornika elektrycznego P
o
(dla prądu
stałego, bo dla prądu przemiennego jest to bardziej złożone) określana jest wzorem:
O
O
O
I
U
P
⋅
=
.
Do wyznaczenia mocy potrzebny jest, więc pomiar napięcia U
o
na odbiorniku oraz
pomiar prądu I
o
pobieranego przez ten odbiornik. Miernik elektrodynamiczny ma dwa
uzwojenia: przez jedno (ruchome) może przypływać tylko niewielki prąd, więc nadaje się ono
do pomiaru napięcia; drugie (nieruchome) wykonane może być z przewodu o dużym
przekroju poprzecznym, więc można nim mierzyć natężenie prądu elektrycznego. Miernik
z ustrojem elektrodynamicznym nadaje się, więc świetnie do zastosowania jako watomierz.
Parametry cewek muszą być odpowiednio dobrane – każdej z nich zgodnie z jej
przeznaczeniem.
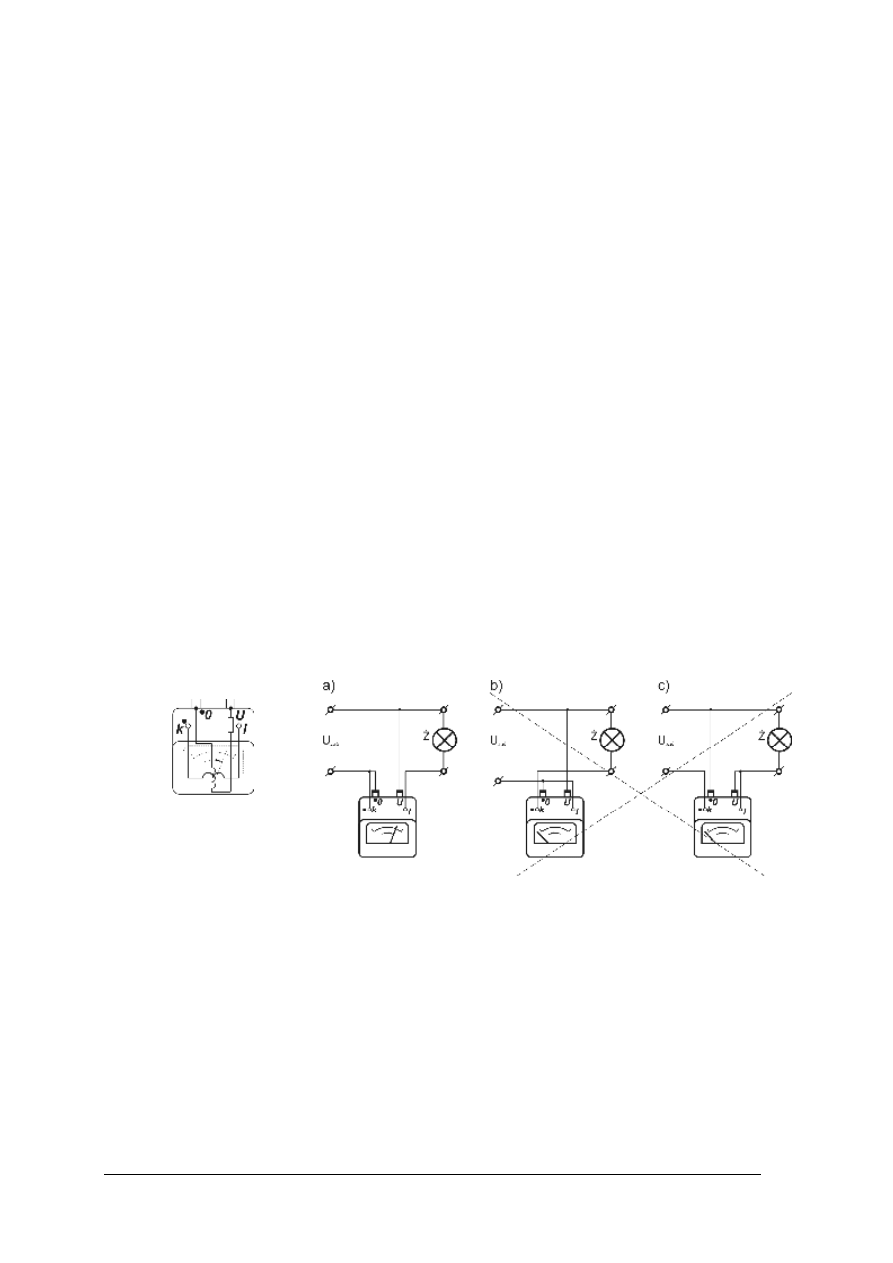
Rys. 14. Podłączenie cewek
watomierza
elektrodynamicznego
do zacisków wyjściowych
[7, s. 103]
Rys. 15. Podłączanie watomierza do obwodu elektrycznego: prawidłowe
podłączenie (a) i nieprawidłowe (b), (c) [7, s. 103]
Ponadto, cewki muszą być „odpowiednio” włączane w obwód elektryczny, dlatego
zaciski uzwojeń są „odpowiednio” oznaczane. Początki uzwojeń oznaczane są gwiazdkami
albo kropkami. Wewnętrzne połączenie takiego miernika przedstawione jest na rys. 14.
Cewka podłączona do zacisków „k” i „l” jest tzw. cewką prądową, której przeznaczeniem jest
pomiar natężenia prądu przepływającego przez odbiornik. Natomiast cewka podłączona do
zacisków „0” i „U” jest tzw. cewką „napięciową” – „mierzy” ona napięcia. Ponieważ przez
cewki może przepływać zarówno prąd stały, jak i zmienny, to watomierz taki nadaje się do
pomiaru pobieranej mocy przez odbiornik prądu stałego oraz przez odbiornik prądu
przemiennego. W obwodach prądu przemiennego watomierz taki mierzy moc czynną.
Prawidłowe podłączenie watomierza przedstawiono na rys. 15a, a możliwe błędy popełniane
podczas podłączania watomierza na rys. 15 b i 15c.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Ogólne zasady postępowania z miernikami analogowymi
Mierniki analogowe są przyrządami o delikatnej konstrukcji, która nie powinna podlegać
wstrząsom, drganiom, są one wrażliwe na upadki, uderzenia i inne tym podobne niewłaściwe
traktowanie ich. Użytkownik powinien odpowiednio dbać o miernik, a w szczególności:
1. chronić miernik przed wszelkiego rodzaju uderzeniami mechanicznymi,
2. utrzymywać miernik w czystości,
3. kontrolować stan elektrycznych zacisków zewnętrznych lub gniazd wtykowych
do podłączenia przewodów pomiarowych.
Jeżeli konstrukcja elektrycznego organu pomiarowego wymaga zasilania z baterii
elektrycznej, użytkownik musi okresowo, nie rzadziej niż raz na tydzień kontrolować, czy nie
pojawiły się wycieki elektrolitu z ogniw baterii. W takim przypadku należy wyczyścić
pojemnik baterii. Należy przy tym zachować szczególną ostrożność, ponieważ wyciekający
elektrolit może być kwasem (albo zasadą), w związku, z czym pocierając oczy brudną ręką
można je sobie uszkodzić lub ulec zatruciu, jeśli związek dostanie się do układu
pokarmowego lub do rany.
Czynności obsługowo–regulacyjne wykonywane przez serwisy naprawcze sprowadzają
się do wykonywania następujących prac:
a) czyszczenie wnętrza suchym i czystym sprężonym powietrzem,
b) regulacja położenia zerowego (spoczynkowego) wskazówki,
c) wyważania ciężarkami ustroju pomiarowego,
d) regulacja docisku łożyska do czopu osi,
e) sprawdzenie poprawności działania i pomiaru (czy wielkość popełnianych błędów
pomiarów mieści się w dopuszczalnym zakresie).
Pod względem mechanicznym konserwacja mierników sprowadza się do ich okresowego
czyszczenia. Wnętrze powinno być, w celu usunięcia kurzu i innych drobnych
zanieczyszczeń, przedmuchiwane suchym i czystym sprężonym powietrzem. Intensywność
strumienia powietrza nie powinna być zbyt duża, ponieważ mogłoby dojść do uszkodzenia
delikatnego zawieszenia ustroju pomiarowego lub sprężyn powrotnych, co mogłoby zmienić
stałe konstrukcyjne miernika, a przez to całkowicie zmienić wartość jego wskazań.
Mierniki wielkości elektrycznych i nieelektrycznych muszą być poddawane
tzw. legalizacji – okresy pomiędzy kolejnymi legalizacjami określają odpowiednie normy
branżowe. Legalizacja jest to sprawdzenie poprawności działania miernika i polega ona
na wykonaniu kilku podstawowych działań:
a) sprawdzenie miernika pod względem mechanicznym:
—
brak uszkodzeń obudowy przyrządu,
—
brak uszkodzeń ustroju pomiarowego,
—
prawidłowość działania mechanicznego, brak jakichkolwiek zacięć w ruchu
wskazówki w całym zakresie wychyleń organu ruchomego.
b) sprawdzenie obwodów elektrycznych i elektronicznych miernika, polegającym na:
—
sprawdzeniu prawidłowości działania części elektrycznej,
—
wykonaniu pomiarów kontrolnych na wszystkich zakresach pomiarowych miernika
i sprawdzenie, czy błędy mieszczą się w dopuszczalnym przedziale.
Wymienione czynności (najważniejsze z koniecznych do wykonania) muszą być
przeprowadzone przez uprawniony do tego organ, którym może być serwis naprawczy
posiadający uprawnienia do legalizacji albo laboratorium kontroli przyrządów pomiarowych,
które ma uprawnienia legalizacji lub też inna instytucja z takimi uprawnieniami. Jedynie
„zerowanie” miernika może być wykonywane przez samego użytkownika. Polega ono na
takim przestawieniu korektora położenia zerowego, aby położenie spoczynkowe wskazówki
miernika pokryło się z zerem na podziałce pomiarowej, gdy przez miernik nie przepływa
żaden prąd.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie elementy budowy są wspólne dla każdego miernika elektrycznego?
2. Jakie znasz rodzaje mierników elektrycznych?
3. Do jakich wielkości stosowane są poszczególne rodzaje mierników?
4. Jak działa miernik z ustrojem magnetoelektrycznym?
5. W jaki sposób dokonuje się pomiaru napięcia za pomocą ustroju magnetoelektrycznego?
6. Jak wykonuje się pomiar prądu miernikiem z ustrojem magnetoelektrycznym?
7. Jak działa miernik elektromagnetyczny?
8. Jakie jest zastosowanie ustrojów elektromagnetycznych?
9. Jaka jest budowa miernika elektrodynamicznego?
10. Jakie jest zastosowanie miernika elektrodynamicznego?
4.1.3. Ćwiczenia
Ćwiczenie 1
Określ rodzaj miernika analogowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) poddać oględzinom wskazany przez nauczyciela miernik,
2) na podstawie symboli na mierniku określić jego ustrój pomiarowy,
3) ustalić mierzoną wielkość: rodzaj prądu (stały, zmienny), napięcie, natężenie prądu, moc;
zakres pomiarowy (lub zakresy).
Wyposażenie stanowiska pracy:
–
mierniki analogowe (woltomierze, amperomierze, watomierze).
Ćwiczenie 2
Przeprowadź regulację miernika analogowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) poddać oględzinom wskazany przez nauczyciela miernik,
2) określić mierzone wielkości i zakresy pomiarowe,
3) sprawdzić czy wskazówka wskazuje zero–jeśli nie to obracając śrubą korektora położenia
wyzerować miernik,
4) sprawdzić, czy wskazówka porusza się (delikatnie obrócić miernikiem),
5) sprawdzić stan obudowy i zacisków podłączeniowych.
Wyposażenie stanowiska pracy:
–
kilka mierników analogowych (woltomierze, amperomierze, watomierze),
–
wkrętaki kilku wielkości (zależnie od potrzeb).
Ćwiczenie 3
Przeanalizuj sposób pomiaru wielkości elektrycznej miernikiem analogowym: napięć
ogniwa galwanicznego i baterii ogniw.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wybrać miernik przeznaczony do pomiaru napięcia ogniwa,
2) wybrać odpowiedni zakres pomiarowy w mierniku do wykonania pomiaru napięcia
wskazanego ogniwa,
3) podłączyć przewodami ogniwo do miernika,
4) dokonać odczytu wskazania miernika,
5) jeśli jest to konieczne,o przeliczyć wskazanie na wartość wielkości mierzonej wg wzoru:
zak
zak
ws
ws
W
l
l
W
⋅
=
gdzie: W
ws
–wartość wskazana,
W
zak
–maksymalna wartość zakresu,
l
ws
–liczba wskazanych działek,
l
zak
–liczba wszystkich działek zakresu,
Wyposażenie stanowiska pracy:
–
mierniki analogowe (woltomierz, amperomierz, watomierz, miernik uniwersalny),
–
kilka suchych ogniw galwanicznych i baterii ogniw,
–
przewody połączeniowe.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić ogólną budowę miernika analogowego?
2)
odróżnić poszczególne rodzaje mierników analogowych?
3)
zmierzyć natężenie prądu pobieranego przez żarówkę
podłączoną do baterii?
4)
określić sposób rozszerzania zakresu amperomierza?
5)
określić sposób rozszerzania zakresu pomiarowego
woltomierza?
6)
zmierzyć napięcie na żarówce choinkowej?
7)
zmierzyć moc pobieraną przez silnik prądu stałego
dołączony do akumulatora?
8)
wykonać
czynności
obsługi
okresowej
miernika
wykonywanej przez użytkownika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
4.2. Manometry
4.2.1. Materiał nauczania
Manometr, nazywany często ciśnieniomierzem, jest przyrządem pomiarowym służącym
do mierzenia ciśnienia płynów, gazów. W zależności od ciśnienia odniesienia, któremu
przypisuje się wartość „zero” („0”), rozróżnia się: ciśnieniomierze absolutne, gdzie
ciśnieniem odniesienia jest ciśnienie próżni (próżniomierze i barometry) oraz ciśnieniomierze
do pomiaru ciśnienia względnego, gdzie ciśnieniem odniesienia jest aktualne ciśnienie
w chwili i w miejscu pomiaru (manometry do pomiaru nadciśnienia, wakuometry do pomiaru
podciśnienia i manowakuometry do pomiaru nadciśnienia i podciśnienia) oraz
ciśnieniomierze różnicowe. Manometry mogą wykonywać pomiar wykorzystując jedną
z różnych zasad pracy. Pod tym względem można wśród nich wyodrębnić m.in.: manometry
prężne (przeponowe, mieszkowe i z rurką Bourdona) oraz manometry elektryczne
(rezystancyjne, piezoelektryczne). Manometry muszą mieć podziałkę wyskalowaną
w jednostkach ciśnienia, czyli w Pa (niutonach na metr kwadratowy). Jest to jednostka
zgodna z układem SI, ale w praktyce jest ona bardzo rzadko używana. Poniższa tabela podaje
jednostki używane praktycznie i ich przeliczniki na, zgodny z układem SI, 1 Pa.
Tabela 1. Jednostki ciśnienia [opracowanie własne].
Lp.
Nazwa
Oznaczenie
Przeliczenie na 1 N/m
2
1
pascal
1Pa
1Pa = 1N/m
2
2
kilopascal
1kPa
1kPa = 1000N/m
2
3
megapascal
1MPa
1MPa = 1000000N/m
2
4
atmosfera techniczna
1at
1at = 1 kG/cm
2
= 98 066,5N/m
2
5
atmosfera fizyczna
1atm
1atm = 101325N/m
2
6
bar
1bar
1bar = 10
5
N/m
2
7
milimetr słupa wody
1mm H
2
O
1mm H
2
O = 9,80665N/m
2
8
milimetr słupa rtęci
1mm Hg
1mm Hg = 133,332N/m
2
9
kilogram–siła
na
centymetr
kwadratowy
1kG/cm
2
1kG/cm
2
= 98 066,5N/m
2
Manometr prężny to taki, w którym pod wpływem ciśnienia (lub różnicy ciśnień)
odkształca się element sprężysty. Często stosowanymi manometrami tej grupy są manometry
z rurką Bourdona. Rurka ta wykonana jest z mosiądzu, brązu lub stali, czyli materiałów
o dużej sprężystości. Jeden jej koniec jest zamknięty, drugi zaś łączy się z gwintowaną
końcówką służącą do połączenia z instalacją, w której ma być mierzone ciśnienie. Budowę
manometru, którego działanie opiera się na sprężystości tej rurki obrazuje rys. 20.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
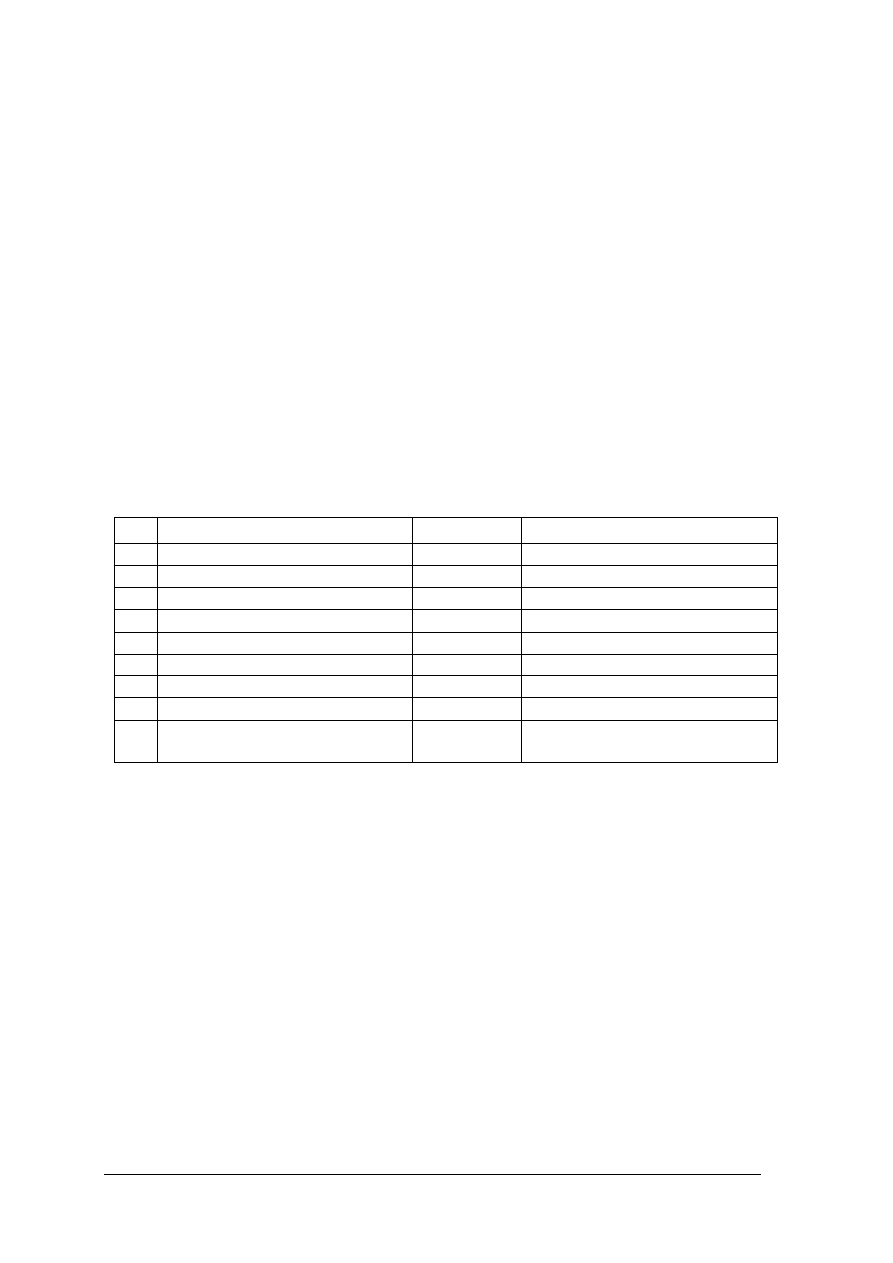
Rys. 20. Manometr z rurką Bourdona: a) budowa manometru, b) rurka Bourdona, 1 – rurka Bourdona,
2 – widełki, 3 – cięgno, 4 – sektor zębaty, 5 – łącznik rurki, 6 – kanał łączący z wnętrzem
rurki [1]
Czynnik gazowy (lub płynny) doprowadzony poprzez kanał (6) do rurki Bourdona
powoduje wzrost ciśnienia w jej wnętrzu, więc rurka „próbuje wyprostować się”. Wielkość
tego odkształcenia jest zależna od ciśnienia – większe ciśnienie, to większa siła prostująca,
a więc większe odkształcenie od stanu spoczynkowego; mniejsze ciśnienie – odkształcenie
mniejsze. Ruch wolnego końca odkształcanej rurki przekazany przez widełki (2)
do mechanizmu przekładniowego powodując obrót zębnika (znajduje się on na jednej osi
ze wskazówką). Rurki Bourdona w manometrach dla ciśnień normalnych i średnich
wykonywane są jako cienkościenne o przekroju owalnym lub eliptycznym, a dla wysokich
ciśnień grubościenne – najczęściej o przekroju poprzecznym z zewnętrznym obrysem
w kształcie koła (lub zbliżonym do niego). Takie grubościenne rurki mają najczęściej
zmieniający się przekrój wraz ze oddalaniem się od początku rurki, co jest spowodowane
nierównomiernością pojawiających się naprężeń podczas pomiaru ciśnienia. Obudowy tych
manometrów są znormalizowane i ich średnice wynoszą: 60; 80; 100; 160; 250; 400 mm.
Manometrem prężnym jest też manometr membranowy (przeponowy). W manometrze
tym (rys. 21), membraną jest płytka sprężysta w kształcie koła (1). Przepony takie są płaskie
lub posiadają koncentryczne wytłoczenia. Dzięki tym wytłoczeniom, możliwe są większe
odkształcenie membrany.
Rys. 21.
Manometr membranowy: 1 – przepona (membrana), 2 – dolny korpus komory
przeponowej, 3 – górny korpus komory przeponowej, 4 – cięgno, 5 – sektor zębaty,
6 – zębnik, 7 – sprężyna spiralna, 8 – popychacz, 9 – króciec gwintowany [1]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
W manometrze tym elementem pomiarowym jest przepona (1), która znajduje się
w komorze składającej się z dwóch skręconych ze sobą części korpusu (2 i 3). Z membraną
(przeponą) połączony jest trzpień–popychacz (8), który poruszając się obraca sektorem
zębatym (5). Sektor zazębiony jest z zębnikiem (6), który jest osadzony na jednej osi ze
wskazówką.
Manometry z mieszkiem sprężystym stosowane są do pomiaru małych ciśnień. Budowa
takiego manometru jest bardzo podobna do manometru przeponowego, ale elementem
sprężystym czułym na ciśnienie jest mieszek. Mieszek jest elementem sprężystym
wykonanym z mosiądzu, brązu albo stali nierdzewnej, mającym kształt puszeczki z mocno
karbowanymi obwodowo ścianami bocznymi. Mieszki takie mają małą sztywność, więc
często ich działanie rozprężne wspomagane jest dodatkową sprężyną. Stosowane są do tego
sprężyny spiralne i wtedy mieszczek uszczelnia tylko manometr i przenosi ruch, a właściwym
elementem pomiarowym jest sprężyna. Wskazania takich manometrów zamieniane są
najczęściej na ruch wskazówki (podobnie jak w manometrze przeponowym).
Manometr piezoelektryczny to taki, w którym zasadniczym elementem pomiarowym jest
piezoelektryk, na który działa siła wytworzona przez ciśnienie mierzonego gazu (lub cieczy).
Piezoelektryk, to substancja krystaliczna, która pod wpływem mechanicznego odkształcenia
od stanu normalnego (spoczynkowego) wytwarza siłę elektromotoryczną na przeciwległych
ściankach. Jeżeli na płytkę wykonaną z piezoelektryka będzie działać ciśnienie, to pod jego
wpływem nastąpi jej odkształcenie. Odkształcenie spowoduje wytworzenie różnicy
potencjałów. Napięcie to po pomiarze czujnikiem i odpowiednim przekształceniu zmierzy
miernik elektryczny wyskalowanym w jednostkach ciśnienia. Najczęściej jako manometry
piezoelektryczne stosowane są półprzewodnikowe układy scalone z czujnikami
piezoelektrycznymi – ogólna budowa przedstawiona jest na rys. 22.
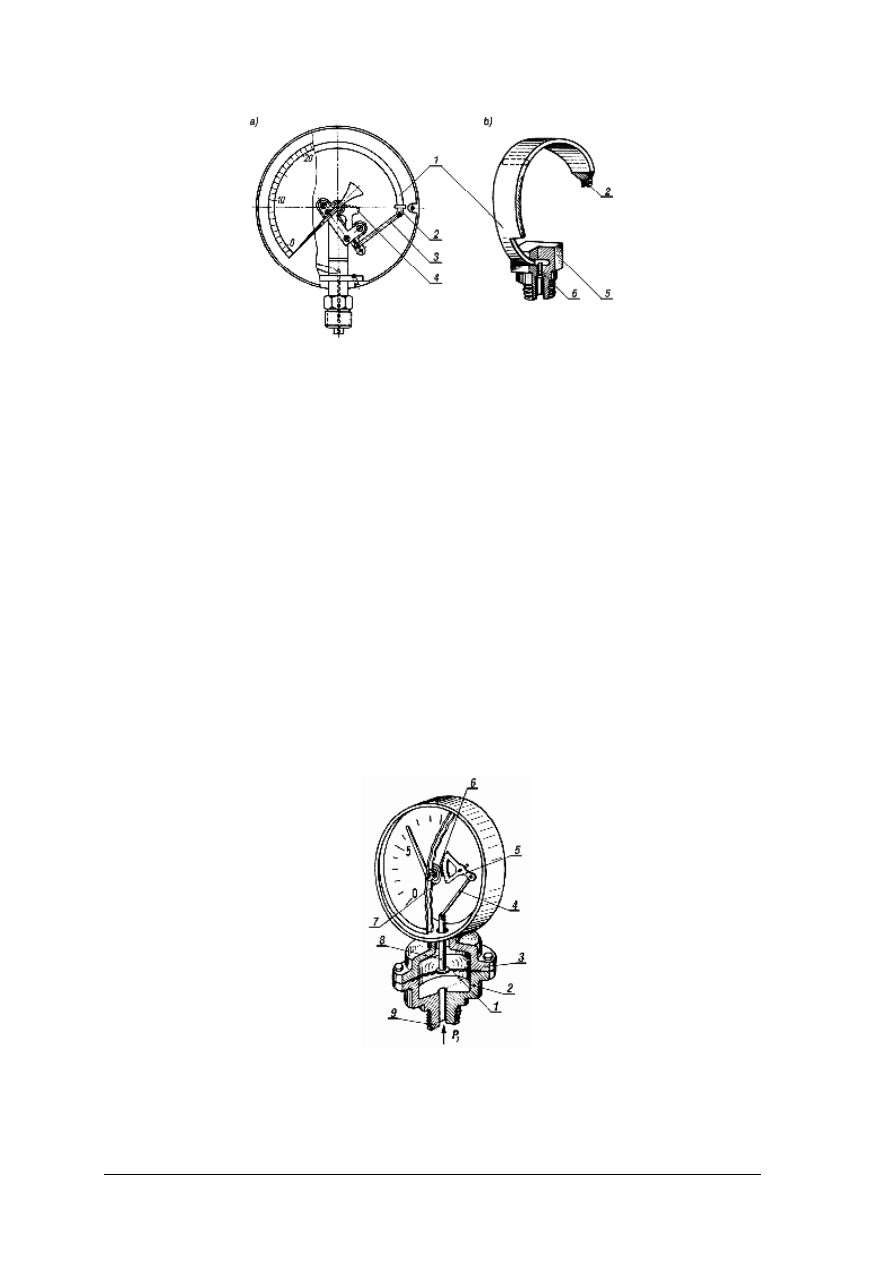
Rys. 22. Czujnik półprzewodnikowego manometru piezoelektrycznego serii MPX: a) budowa:
1 – osłona metalowa (nierdzewna), 2 – membrana silikonowego żelu uszczelniającego,
3 – obudowa epoksydowa, 4 – metalowe wyprowadzenie elektryczne, 5 – mostki łączące
z wyprowadzeniami, 6 – struktura krzemowa, b) oznaczenie na schematach, c) schemat
blokowy struktury wewnętrznej [9, s. 202]
Czujnik scalony zbudowany jest tak, że jego układ składa się ze kilku
półprzewodnikowych struktur piezoelektrycznych, połączonych ze sobą w układ mostkowym.
W niektórych typach układów tej rodziny, oprócz elementów piezoelektrycznych w skład
struktury wchodzi element kompensacji temperatury (jeden lub kilka), który umieszczony
w obrębie jednej płytki półprzewodnika, pozwala w dalszym układzie wprowadzać poprawki
temperaturowe. W efekcie tego scalony czujnik ciśnienia staje się nieczuły na zmiany
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
temperatury. Czujniki tego rodzaju są produkowane przez różnych producentów (Infineon,
Motorola, Siemens i in.), w wielu różnych wariantach. Różne warianty czujników ciśnienia,
konstruowanych w oparciu o tą samą krzemową strukturę pomiarową, umieszczone
w różnych obudowach, zmieniających sposób zastosowania sensora, przedstawia rys. 23.
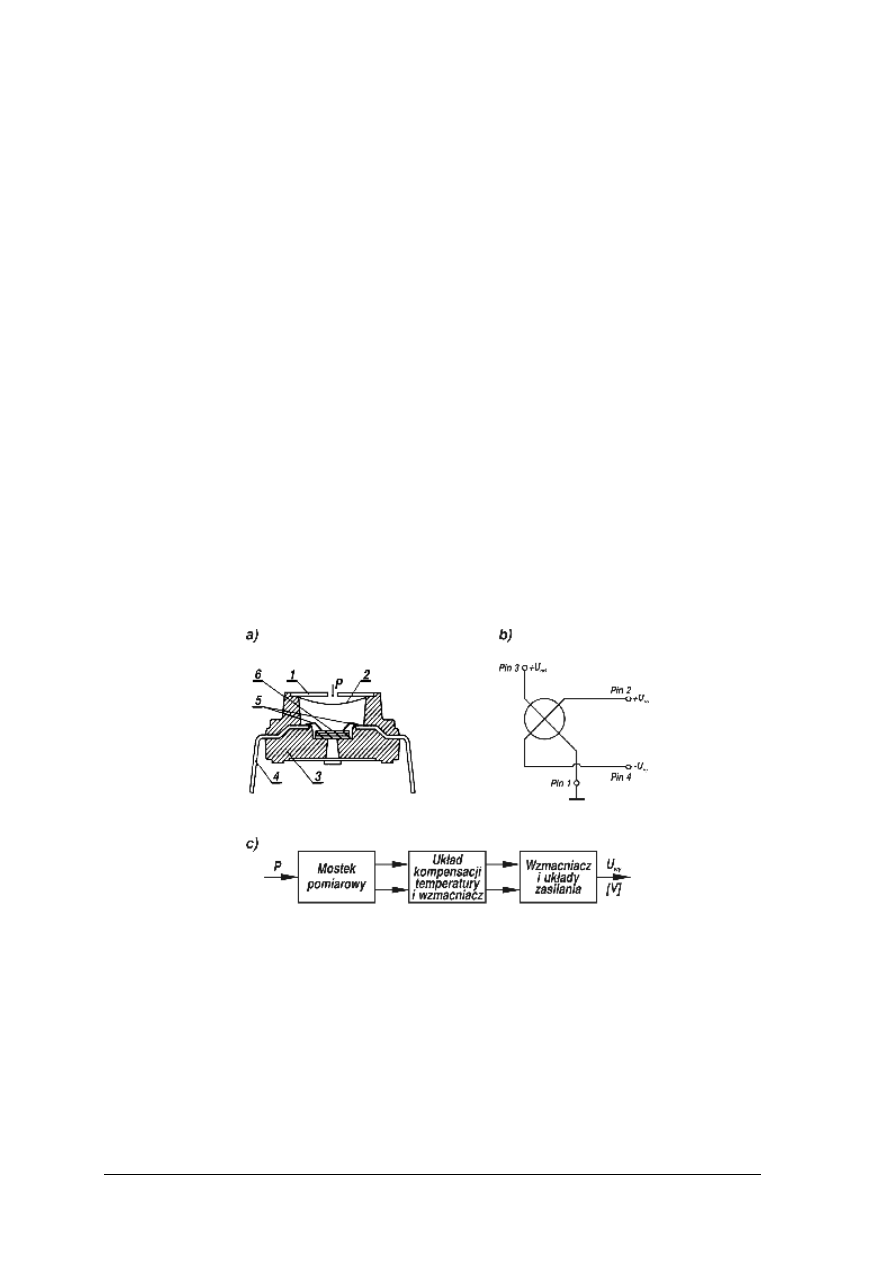
Rys. 23.
Piezorezystancyjny czujnik manometryczny MPX10 (prod. Motorola): a) do
pomiaru ciśnienia otaczającego środowiska, b) do pomiaru różnicy ciśnień, c) do
wlutowania w płytkę drukowaną, d) do montażu powierzchniowego [Motorola
Semiconductor 10 kPa Uncompensated Silicon Pressure Sensors, Motorola
Semicoductor Technical Data, www.motorola.com/semiconductors]
Wersja z rys. 23a przeznaczona jest to pomiaru ciśnienia otoczenia (powietrza lub innego
gazu nieszkodliwego dla układu scalonego). Na rys. 23b tą samą strukturę czujnika
umieszczono w obudowie pozwalającej mierzyć różnicę ciśnień doprowadzonych
przewodami gazowym do dwóch króćców. Pomiar ciśnienia, doprowadzonego przewodem
(rurką, wężykiem) powietrza, pozwalają dokonać również dwa pozostałe czujniki z tym,
że ten z rys. 23c jest wlutowywany w płytkę drukowaną, a z rys.23d przeznaczony jest
do montażu powierzchniowego SMD (ang. Surface Mount Device).
Do mierzenia ciśnienia używane są również tensometryczne czujniki. Działają one
w oparciu o pomiar pośredni – tensometryczny pomiar odkształcenia membrany, na którą
działa ciśnienie. Przykład takiego czujnika przedstawiony jest na rys. 24.
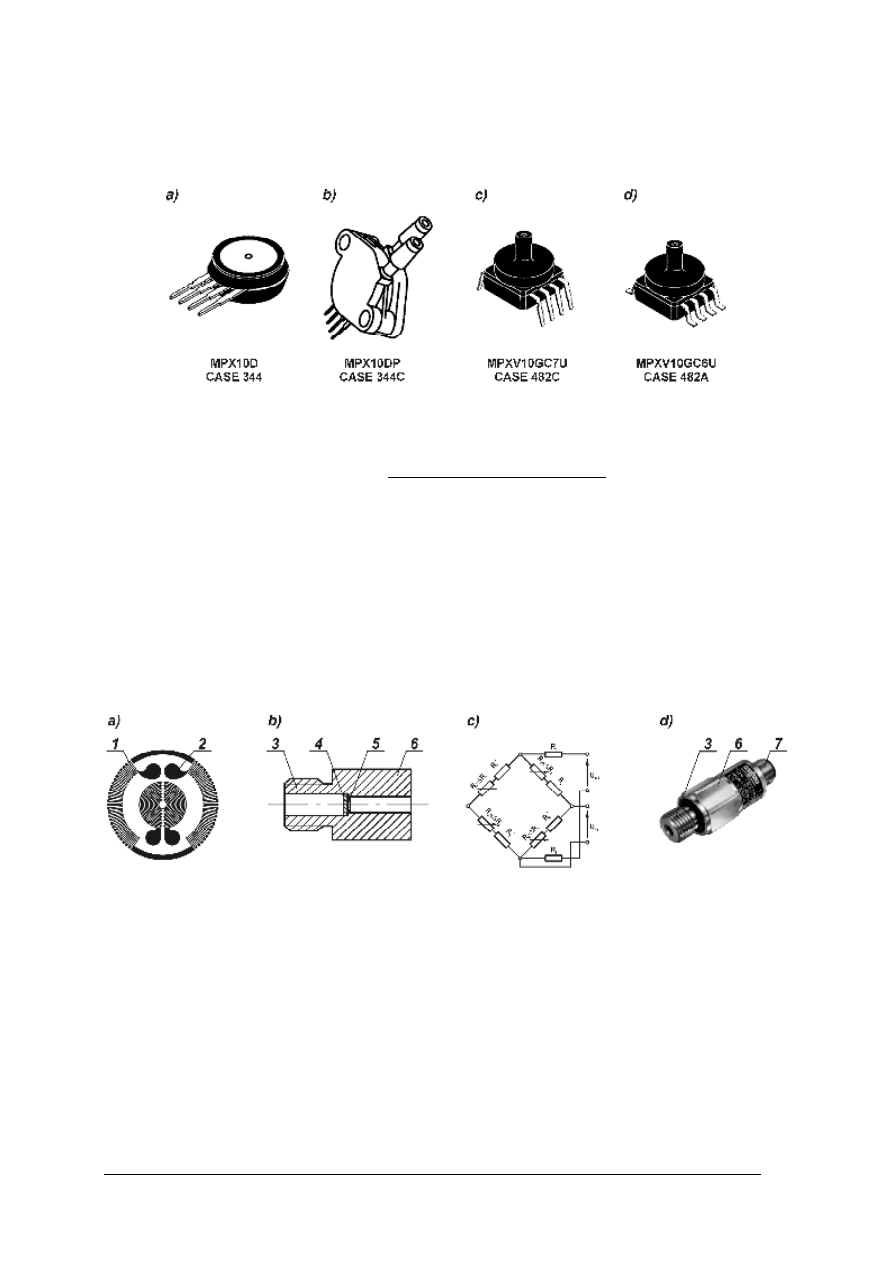
Rys. 24.
Tensometryczny czujnik ciśnienia: a) foliowy manometr tensometryczny (przykład),
b) przekrój rzeczywistego manometru tensometrycznego, c) schemat połączeń
rezystorów pomiarowych, d) tensometryczny czujnik pomiarowy typu 8253
(holenderskiej firmy Trafag Sensor Control): 1 – rezystor pomiarowy (jeden
z czterech), 2 – pole kontaktowe, 3 – króciec pomiarowy, 4 – membrana, 5 – foliowy
czujnik tensometryczny ciśnienia, 6 – metalowy korpus czujnika, 7 – elektryczne
złącze pomiarowe [opracowanie własne]
Do króćca pomiarowego (3) doprowadzony jest przewód pomiarowy (z gazem lub
cieczą). Na membranę (4) działa siła odkształcająca ją, która jest proporcjonalna do ciśnienia
gazu (lub cieczy) doprowadzonego przewodem pomiarowym. Na drugiej stronie membrany
naklejony jest na nią tensometr foliowy (5), który razem z nią się odkształca. Tensometr
skonstruowany jest z rezystorów pomiarowych wykonanych jako metalowe przewody
elektryczne o dużej długości w stosunku do swoich wymiarów poprzecznych (do powierzchni

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
przekroju poprzecznego). Rezystory te wykonane są jako ścieżki przewodzące na
powierzchni
folii
(podobnie
jak
ścieżki obwodów drukowanych na płytkach
z tzw. „laminatu”). Przykład takiego tensometru foliowego przedstawiony jest na rys. 24a.
Składa się on z czterech rezystorów pomiarowych: dwa mają „przewody” pomiarowe
ustawione promieniowo (znajdują się one przy zewnętrznych krawędziach czujnika);
a pozostałe dwa znajdują się w środku czujnika – ich przewody pomiarowe są ścieżkami
ułożonymi w kształcie współśrodkowych łuków, w środkowej części czujnika. Rezystory
pomiarowe mogą, w innych typach czujników, mieć różne kształty. Odpowiednio dobierając
kształt rezystora pomiarowego, można dopasować go do konkretnego kształtu przedmiotu
i rodzaju odkształcenia tego przedmiotu, aby zależności zmian rezystancji był liniowy.
Podczas działania siły rozciągającej, przewody rezystora tensometrycznego nieznacznie
wydłużają się, co powoduje zmianę jego rezystancji R rezystora. Jej zmiany określa poniższa
zależność:
l
l
k
R
R
∆
⋅
=
∆
,
gdzie: –
∆
R
– przyrost (lub zmniejszenie) rezystancji rezystora czujnika [w
Ω
],
– R
– znamionowa rezystancja rezystora nieobciążonego czujnika [w
Ω
],
–
∆
l
– przyrost (lub zmniejszenie) długości przewodu czujnika [w m],
– l
– długość całkowita przewodu czujnika nieobciążonego [w m],
– k
– czułość tensometru.
W rzeczywistych czujnikach najczęściej stosuje się cztery rezystory pomiarowe
połączone w mostek Wheatstone’a (rys. 24c). Połączenie to stosuje się w celu otrzymania jak
najbardziej liniowej charakterystyki zmian napięcia wyjściowego w zależności do zmian
mierzonego ciśnienia (U
wy
=f(p
m
)). Na schemacie połączeń elementów pomiarowych czujnika
z każdym rezystorem tensometrycznym (R
i
) szeregowo z nim połączony jest dodatkowy
rezystor (R
i
’). Dodatkowe rezystory służą do kalibracji całego mostka w jego fazie
produkcyjnej. Na rys. 24d przedstawiono przykład rzeczywistego tensometryczne czujnika
ciśnienia. Używając manometrów należy przestrzegać pewnych zasad ich doboru i obsługi,
które można określić następująco:
1. Przy wyborze manometru należy zwrócić uwagę:
a) na przewidywany zakres mierzonych ciśnień, a więc na zakres pomiarowy
manometru – maksymalne dopuszczalne ciśnienie mierzone manometrem musi być
większe od przewidywanego badanego ciśnienia (ok. 25–100% – przy większych
różnicach pomiar będzie utrudniony lub niemożliwy),
b) na klasę dokładności a więc na maksymalne błędy z jakimi można mierzyć ciśnienie:
1.
klasa dokładności powinna zapewniać wystarczającą dokładność pomiaru,
2.
przyrządy o bardzo dużej dokładności najczęściej są drogimi przyrządami, które
są nieporęczne do użycia np. w instalacjach przemysłowych,
3.
przyrządy bardzo dokładne są często kłopotliwe w obsłudze – ma to duże
znaczenie, gdy pomiary muszą być wykonywane szybko.
2. Dobrać odpowiednio manometr do rodzaju mierzonego gazu lub cieczy:
a) manometr posiadający części wykonane z miedzi lub jej stopów, nie może mierzyć
ciśnienia acetylenu.
b) tlen nie może stykać się z tłuszczami.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
c) jeżeli nie można zastosować manometru, który może współpracować z danym gazem
lub oparami cieczy, to należy zastosować wtedy odpowiedni „bezpiecznik
pośredniczący”. Przykład takiego bezpiecznika jest przedstawiony na rys. 25.
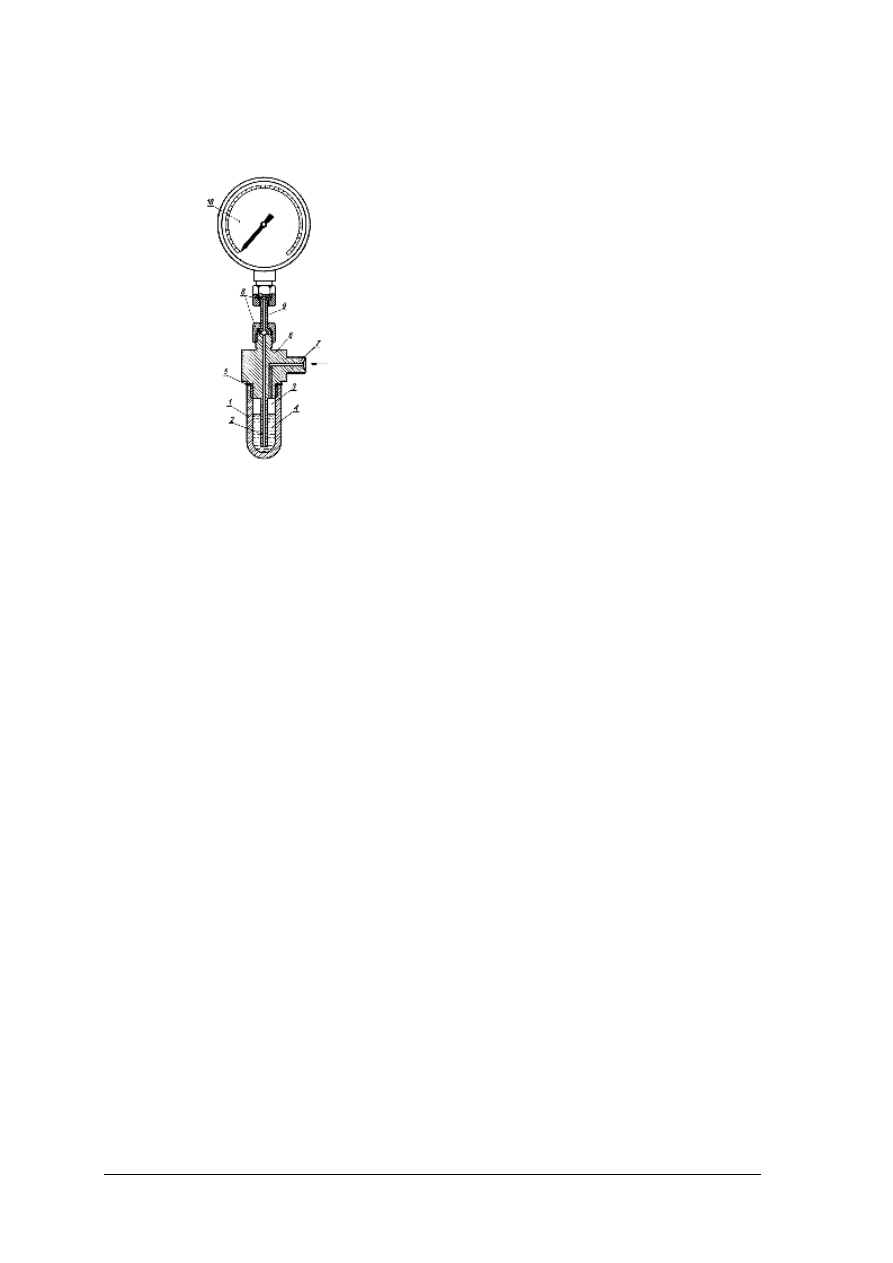
Rys. 25. Połączenie manometru ze źródłem ciśnienia za pośrednictwem „bezpiecznika”: 1 – zbiornik
bezpiecznika, 2 – przewód od manometru, 3 – pośrednia komora ciśnieniowa, 4 – obojętna
ciecz przenosząca ciśnienie, 5 – uszczelka, 6 – korpus bezpiecznika, 7 – końcówka łącząca
ze źródłem mierzonego ciśnienia, 8 – nakrętki, 9 – rurka, 10 – manometr [1, s. 177]
d) jeżeli mierzony gaz lub ciecz ma wysoką temperaturę, to należy zastosować podobny
do bezpiecznika izolator, który oddzieli od siebie środowiska o różnych stanach
skupienia lub niemogących się stykać ze względu na możliwość np. tworzenia
mieszanin żrących, wybuchowych itp.
3. Manometr musi być zainstalowany w taki sposób, aby jego podziałka (pole odczytowe)
było dobrze widoczne.
4. Manometr musi być poprawnie połączony ze źródłem ciśnienia (lub podciśnienia) –
niedopuszczalne są jakiekolwiek nieszczelności.
W czasie eksploatacji manometrów konieczne jest okresowe sprawdzenie ich stanu
technicznego i dokładności wskazań. Jest to spowodowane tym, że bardzo często manometry
mierzą ciśnienie gazu w zbiornikach, które grożą wybuchem w przypadku przekroczenia
ciśnienia granicznego. Jest bardzo ważne, aby to, co manometr wskazuje, było rzeczywistym
ciśnieniem. Sprawdzanie manometrów polega na kontrolowaniu poprawności ich wskazań na
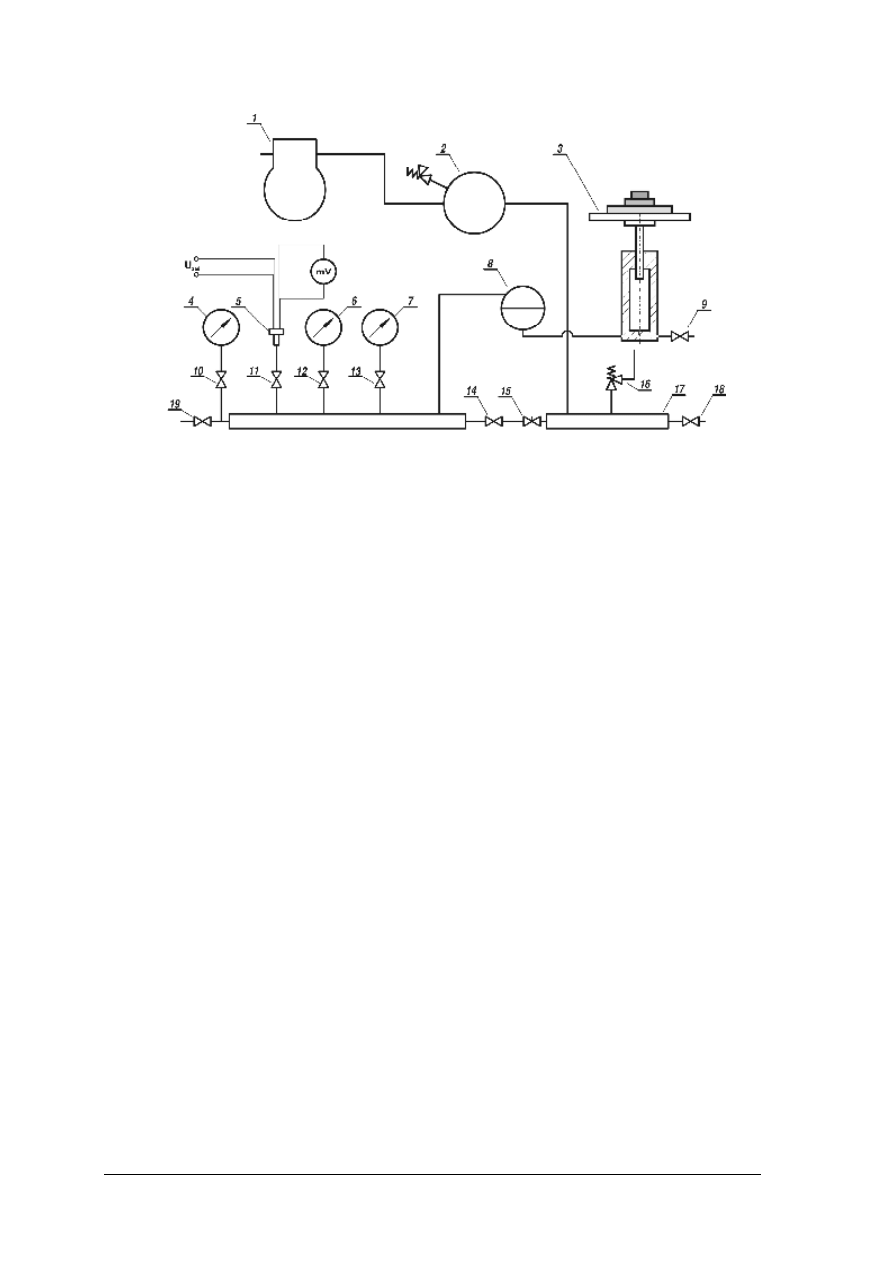
stanowiskach pomiarowych. Przykładem takiego stanowiska może przedstawione na rys. 26.
W zależności od rodzaju użytej sprężarki (1) można będzie osiągać różne ciśnienia
sprężanego powietrza i badać różne rodzaje manometrów. Sprężane powietrze gromadzone
jest w zbiorniku wyrównawczym (2), który wyposażony jest w zawór bezpieczeństwa. Ze
zbiornika wyrównawczego powietrze przepływa (przewodem powietrznym) do kolektora
rozdzielającego (17), do którego podłączony jest drugi zawór bezpieczeństwa (16) oraz zawór
spustowy (18). Z kolektora powietrze przepływa do reduktora (15) i po obniżeniu ciśnienia,
przez zawór (14), przepływa dalej do drugiego kolektora rozdzielającego. Jako manometr
wzorcowy zastosowany jest tutaj manometr obciążnikowo–tłokowy (3). Manometr ten jest
podłączony do reszty instalacji ciśnieniowej za pośrednictwem zbiornika separującego (8).
Drugi kolektor rozdzielający ma przewody z króćcami połączeniowymi, przeznaczonymi do
podłączania badanych manometrów. Każdy ze wspomnianych przewodów wyposażony jest
w zawór odcinający (10, 11, 12, 13). W układzie zastosowano manometr kontrolny (4)
podłączony poprzez przewód z zaworem (10). Badane manometry to: piezoelektryczny
scalony czujnik ciśnienia (5), manometr z rurką Bourdona (6) oraz manometr mieszkowy (7).
Jeżeli do króćców pomiarowych podłączone zostaną manometry i czujnik o różnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
zakresach pomiarowych, to niemożliwe jest równoczesne badanie ich wszystkich. Należy
wtedy najpierw badać manometry o niższych ciśnieniach, a po ich sprawdzeniu zamknąć
zawory odcinające. Później można badać manometry o większych zakresach pomiarowych.
Rys. 26. Schemat stanowiska do badania manometrów: 1 – sprężarka powietrza, 2 – zbiornik
wyrównawczy, 3 – manometr obciążnikowo–tłokowy, 4 – manometr kontrolny,
5 – półprzewodnikowy czujnik ciśnienia, 6 – sprawdzany manometr z rurką Bourdona,
7 – badany manometr mieszkowy, 8 – zbiornik separujący, 9, 18, 19 – zawory
spustowe, 10, 11, 12, 13, 14 – zawory „odcinające”, 15 – reduktor ciśnienia, 16 – zawór
bezpieczeństwa, 17 – kolektor [16, s. 7]
Manometry można też badać pojedynczo i dopasować ciśnienie w lewym kolektorze
rozprowadzającym do pożądanej wielkości za pomocą reduktora (15) i zaworu spustowego
(19). Podczas badania scalonego czujnika ciśnienia (5) musi być on zasilany odpowiednim
napięciem prądu stałego (U
zaś
– dla rodziny MPX... napięcie to ma najczęściej wartość 3V).
Na woltomierzu (mV) odczytywane są napięcia odpowiadające sprawdzanym ciśnieniom.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje manometrów prężnych?
2. Jakie są podstawowe elementy manometru z rurką Bourdona?
3. Jaka jest zasada działania manometru z rurką Bourdona?
4. Jakie elementy wchodzące w skład manometru przeponowego?
5. Jaka jest budowa manometru mieszkowego?
6. Jaka jest zasada działania scalonego manometru piezoelektrycznego?
7. Jakie są zasady wyboru manometru przy pomiarach ciśnienia?
8. Do czego jest stosowany bezpiecznik przy podłączaniu manometru?
4.2.3. Ćwiczenia
Ćwiczenie 1
Podłącz manometr z rurką Bourdona do sprężarki powietrza i sprawdź jego działanie
podczas pomiaru różnych ciśnień.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić czy zbiornik sprężarki jest pusty, a jeżeli nie, to należy otworzyć zawór
wylotowy (po opróżnieniu zbiornika zamknąć go),
2) podłączyć manometr z rurką Bourdona do przewodu ciśnieniowego, a przewód podłączyć
do króćca wylotowego sprężarki,
3) włączyć silnik sprężarki i obserwować kształt rurki Bourdona oraz wskazówkę
manometru.
Wyposażenie stanowiska pracy:
–
sprężarka powietrza z regulatorem ciśnienia wyjściowego,
–
elastyczny ciśnieniowy przewód powietrzny,
–
manometr z rurką Bourdona z przezroczystą obudową (lub ze skalą wykonaną
z przezroczystego materiału).
Ćwiczenie 2
Podłącz manometr mieszkowy do sprężarki powietrza i sprawdź jego działanie podczas
pomiaru różnych ciśnień.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić czy zbiornik sprężarki jest pusty, a jeżeli nie, to trzeba otworzyć zawór
wylotowy (po opróżnieniu zbiornika zamknąć go),
2) podłączyć manometr z mieszkiem sprężystym do przewodu ciśnieniowego,
3) podłączyć przewód elastyczny do króćca wylotowego zbiornika sprężarki,
4) włączyć silnik sprężarki i obserwować mieszek i wskazówkę manometru.
Wyposażenie stanowiska pracy:
–
sprężarka powietrza z regulatorem ciśnienia wyjściowego,
–
elastyczny ciśnieniowy przewód powietrzny,
–
manometr z mieszkiem sprężystym z przezroczystą obudową (lub z oknem do obserwacji
mechanizmu).
Ćwiczenie 3
Wykonaj pomiar ciśnienia czujnikiem piezoelektrycznym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć piezoelektryczny czujnik ciśnienia do kolektora powietrznego,
2) podłączyć zasilanie do zacisków elektrycznych czujnika MPX... oraz zaciski pomiarowe
do woltomierza zgodnie z rysunkiem do ćwiczenia 3,
3) otworzyć zawór do sprawdzanego czujnika,
4) zmierzyć napięcie wyjściowe czujnika,
5) ustawić reduktorem ciśnienie w kolektorze i odczytać dla niego wartość napięcia,
6) powtórzyć czynności pomiarowe dla innych wartości ciśnienia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Rysunek do ćwiczenia 3. Schemat stanowiska do badania manometrów: 1–sprężarka powietrza, 2 – zbiornik
wyrównawczy, 3 – manometr obciążnikowo – tłokowy, 4 – manometr kontrolny,
5 – półprzewodnikowy czujnik ciśnienia, 6 – sprawdzany manometr z rurką
Bourdona, 7 – badany manometr mieszkowy, 8–zbiornik separujący, 9, 18, 19 –
zawory spustowe, 10, 11, 12, 13, 14 – zawory „odcinające”, 15 – reduktor
ciśnienia, 16–zawór bezpieczeństwa, 17 – kolektor [11, s. 7].
Wyposażenie stanowiska pracy:
–
sprężarka powietrza z regulatorem ciśnienia wyjściowego,
–
elastyczny ciśnieniowy przewód powietrzny,
–
kolektor powietrzny z reduktorem i manometrem wzorcowym,
–
piezoelektryczny czujnik ciśnienia,
–
regulowany zasilacz laboratoryjny prądu stałego,
–
woltomierz z przewodami elektrycznymi,
–
zestaw kluczy.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić, co to jest manometr?
2)
wymienić rodzaje manometrów?
3)
przedstawić budowę manometru z rurką Bourdona?
4)
wyjaśnić działanie manometru z rurką Bourdona?
5)
wyjaśnić budowę manometru z mieszkiem sprężystym?
6)
wyjaśnić działanie manometru mieszkowego?
7)
wyjaśnić budowę i ogólne działanie piezoelektrycznego
czujnika ciśnienia?
8)
wykonać
czynności
sprawdzenia
manometrów
mieszkowych, z rurką Bourdona, piezoelektrycznych lub
tensometrycznych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
4.3. Rejestratory
4.3.1. Materiał nauczania
Rejestrator to urządzenie, które samoczynnie zapisuje wyniki różnych pomiarów,
na przesuwającym się nośniku, za pomocą urządzenia piszącego. Nośniki mogą być bardzo
różne. Może być nim taśma papierowa, fotograficzna lub magnetyczna. Ostatnio jako nośniki
rejestrowanych wielkości używane są dyski twarde, płyty CD–R lub DVD–R, a także pamięć
nielotna tzw. typu „flashROM”. Rejestratory mogą dokonywać zapisów ciągłych lub
punktowych (określanych niekiedy zapisem cyfrowym, co nie jest równoznaczne). Zapis
ciągły dokonywany jest na taśmie papierowej, filmowej lub magnetycznej. Zapis na dyskietce
(lub innym nośniku magnetycznym), dysku twardym, płytach CD–R, DVD–R lub pamięci
flash, nie jest zapisem ciągłym, mimo że może zapisywać zdarzenia z jakością telewizji
HDTV. Dlatego też można go określić jako rejestrację punktową. Wszelkie rejestratory
można podzielić na mechaniczne, elektromechaniczne i elektroniczne.
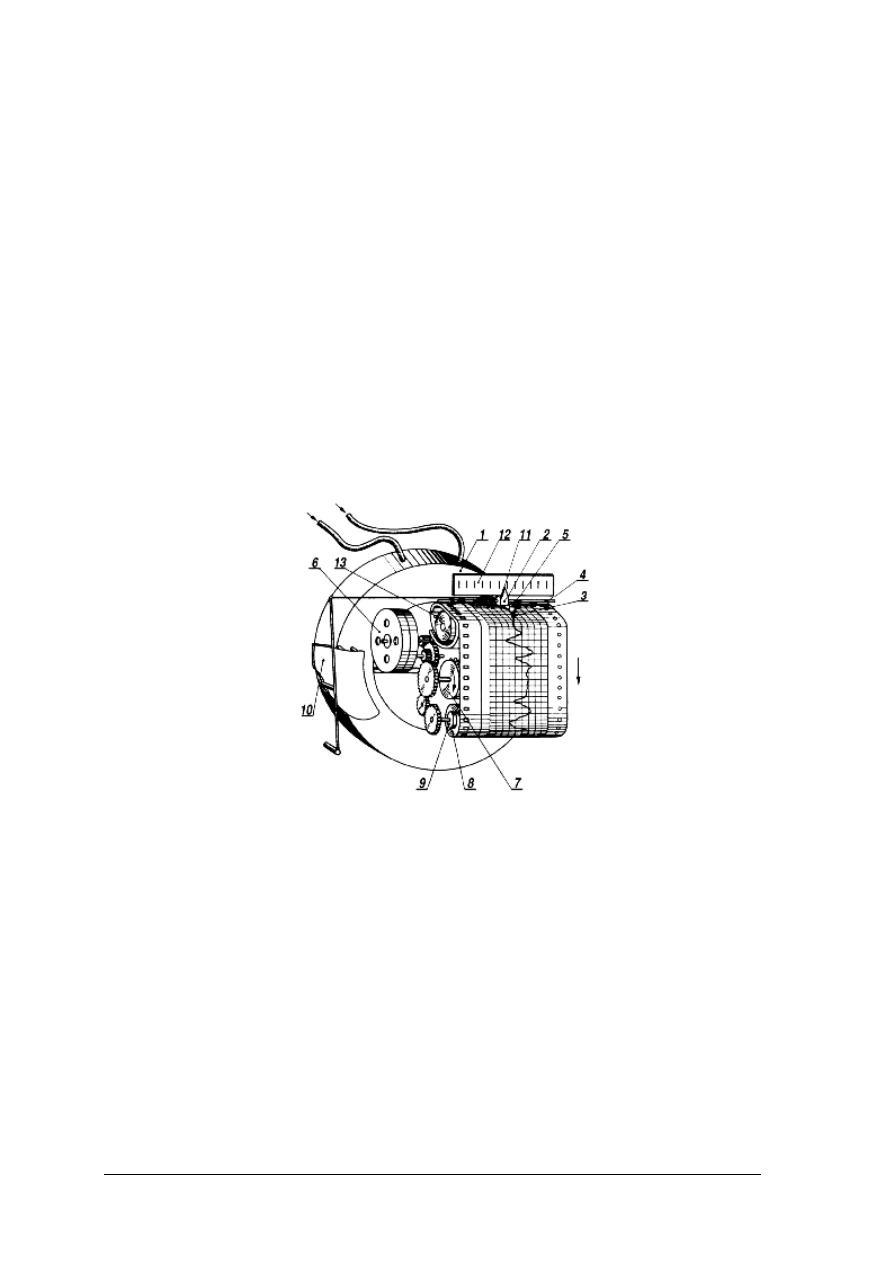
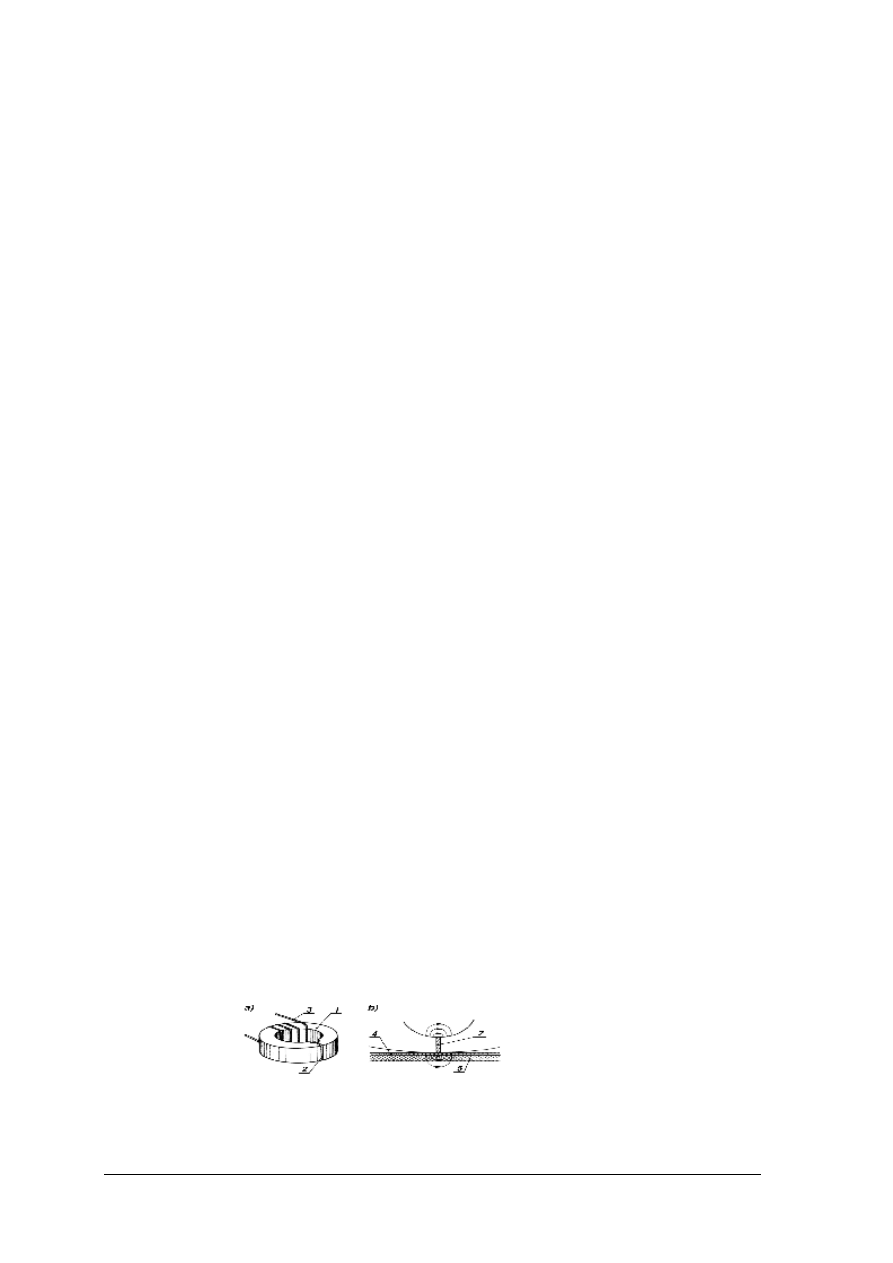
Rejestrator ciągły – jednym z rejestratorów mechanicznych jest rejestrator do zapisu
ciągłego na taśmach papierowych. Na rys. 27 przedstawiono rejestrator, którego zadaniem
jest rejestracja różnicy ciśnień doprowadzonych przewodami ciśnieniowymi.
Rys. 27. Rejestrator ciągły mechaniczny: 1 – pierścień uchylny (element pomiarowy), 2 – karetka,
3 – organ piszący, 4 – prowadnica karetki, 5 – zbiorniczek atramentu, 6 – silnik synchroniczny,
7 – bęben zębaty przesuwu taśmy, 8 – bęben zwijający taśmę, 9 – sprzęgło cierne, 10 – krzywka,
11 – wskaźnik, 12 – podziałka, 13 – rolka z czystą taśmą [1, s. 332]
Różnica doprowadzonych ciśnień powoduje wychylenie się wskazówki (11) o kąt
proporcjonalny do wielkości tej różnicy. Wskazówka sprzężona jest z „pisakiem” (3), który
pozostawia ślad na przesuwającym się bardzo powoli się papierze. Do pisaka atrament
dopływa ze zbiorniczka (5). Taśma papierowa jest przesuwana z odpowiednią prędkością
przez zębaty bęben napędu taśmy (7), odwijając się z rolki (13) i nawijając na bęben
odbiorczy (8). Bęben (7) napędzany jest przez przekładnię zębatą za pośrednictwem sprzęgła
ciernego (9). Koła przekładni wprawia w ruch synchroniczny silniczek elektryczny (6).
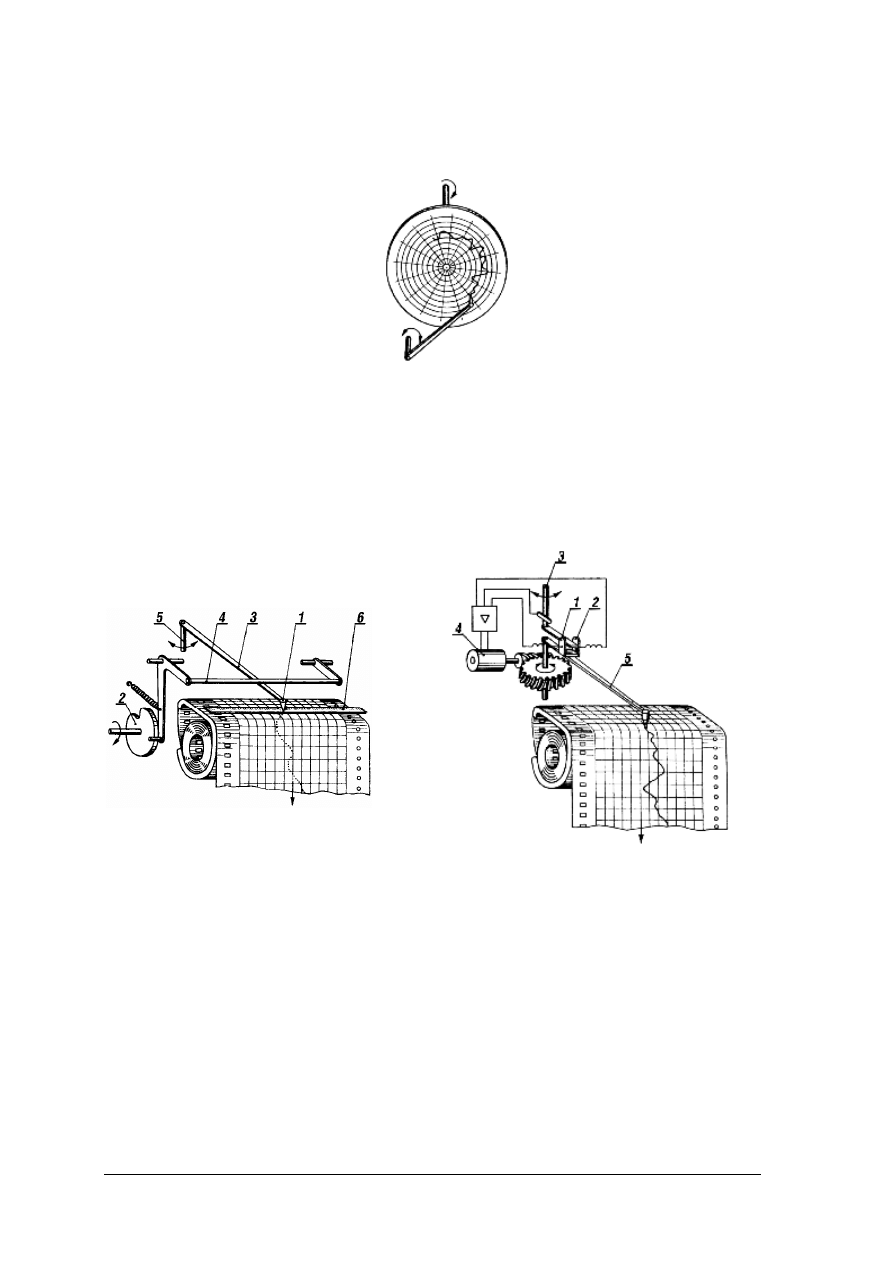
Rejestrator ten zapisuje wyniki pomiarów na taśmie papierowej, ale istnieją wersje
rejestratorów, które mogą to robić na papierze o innym kształcie, np. na okrągłej tarczy –
podobnie jak jest to rozwiązane w tzw. tachometrach drogowych, które zapisują mierzoną
prędkość pojazdu na krążku papierowym, notują czas pracy kierowców samochodów
ciężarowych (rys. 28). Równomierną prędkość przesuwu taśmy zapewnia elektryczny silnik
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
synchroniczny, którego jedną z cech charakterystycznych jest stała prędkość obrotowa
wirnika (silnik taki wymaga zasilania zmiennym prądem elektrycznym o stałej
częstotliwości).
Rys. 28. Przykład rejestracji na tarczy okrągłej [1, s. 332]
Przedstawionym sposobem można rejestrowane też inne wielkości – nie tylko ciśnienie.
Jednak przy rejestracji wielkości elektrycznych, o małych wartościach napięcia lub prądu,
mogą wystąpić zbyt duże opory mechaniczne (tarcia między pisakiem i papierem). Aby
uniknąć pojawiających się w takim przypadku błędów, skonstruowano rejestrator punktowy.
Rejestrator punktowy jest to taki przyrząd rejestrujący, w którym zapisywane są tylko
wartości chwilowe występujące w określonych odstępach czasu. Pisak nie styka się
z papierem cały czas, więc nie występuje tarcie, które utrudniałoby przesuwanie go.
Rys. 29. Rejestrator punktowy z ruchomym kabłąkiem:
1 – „igła” (drukuje kropki), 2 – krzywka
sterująca kabłąkiem, 3 – ramię z igłą
zawieszone
elastycznie,
4
–
kabłąk
dociskowy, 5 – wałek obrotowy zawieszenia
elastycznego ramienia, 6 – taśma barwiąca
[1, s. 333]
Rys. 30. Rejestrator kompensacyjny: 1, 2 – zespół
dwóch
styków,
3–
wałek
sygnału
wejściowego, 4 – silnik, 5 – dźwignia
z pisakiem. 17, s. 334]
W rejestratorze (rys. 29) końcówka ramienia, do której przymocowany jest pisak,
spełniająca rolę wskazówki, nie jest oparta na papierze (jest „w powietrzu”), nie stwarza
żadnych oporów tarcia (poza krótkimi momentami, kiedy jest dociskana do papieru). Można
takim rejestratorem zapisywać wielkości elektryczne, w których sygnały często mają
niewielkie napięcia. Ramię jest przesuwane małymi i delikatnymi mechanizmami
napędowymi w odpowiednie miejsce (wynikające z momentu obrotowego). Co określony
czas (ustalony przez konstruktora) obracająca się krzywka (2) powoduje, że kabłąk (4)
w odpowiednich momentach „dociska igłę” poprzez taśmę barwiącą do papieru, robiąc w tym
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
miejscu kropkę. Można go również wykorzystać w ten sposób, że ten sam organ „piszący”
jest okresowo przełączany do wyjść różnych kanałów pomiarowych (z przestawianiem
położenia zerowego w inne miejsce, dla każdego z zapisywanych kanałów) i zapisuje
przebiegi różnych kanałów na tej samej taśmie papierowej. Rejestrator ten ma też wady –
jedną z nich jest to, że wielkość zapisywana nie jest rejestrowana ciągle, więc jeżeli poza
czasem przeznaczonym na zapis, wielkość zmieni gwałtownie na chwilę swą wartość, to ten
„pik” nie zostanie zarejestrowany – będzie stracony.
Rejestratory kompensacyjne, to takie, w których wielkość mierzona nie jest bezpośrednio
doprowadzona do organu rejestrującego. Jest ona najpierw przekazana do układu
kompensacyjnego, a dopiero później, po przetworzeniu go, do organu rejestrującego.
Przykład takiego rejestratora przedstawiony jest na rys. 30. W rejestratorze tym sygnał
wejściowy zamieniany na moment obrotowy o małej wartości, który obraca wałkiem (3)
powodując wychylenie środkowego styku elektrycznego i zwarcie go ze stykiem (1) lub (2).
W zależności od tego, z którym stykiem zostanie on połączony, to układ elektroniczny włączy
zasilanie silnik elektryczny (4) na obroty prawe lub lewe (zależnie od tego, które styki zostały
zwarte). Silnik obracając się napędza przekładnię ślimakową, która obraca dźwignię (5)
i równocześnie z nią styki (1) i (2), które są z nią połączone. Dźwignia ta przesuwana jest
przez pracujący silnik tak długo, aż nie nastąpi rozwarcie styków (1) i (2). Rozwarcie styków
odcina dopływ sygnału do układu elektronicznego, więc wyłącza on zasilanie silnika
elektrycznego, więc wskazówka z pisakiem zatrzymuje się. Rejestratory te są dokładne, ale
nadają się one tylko do rejestracji przebiegów wolnozmiennych. Wynika to z tego, że
przesuwanie dźwigni z pisakiem za pomocą silnika elektrycznego i przekładni jest obarczone
momentem bezwładności – rozpędzanie silnika i jego hamowanie trwa zbyt długo, aby ten
sposób stosować do przebiegów szybkozmiennych.
Istnieje też grupa rejestratorów, w których funkcję nośnika zapisanej informacji pełni
błona filmowa. Wtedy „pisakiem” nanoszącym informację jest promień świetlny
(lub podczerwony). Rejestratorami korzystającymi z tego nośnika są rejestratory
fotooptyczne. Niewielka masa zwierciadełka i delikatnego uzwojenia połączonego z nim
tworzy układ o bardzo małym momencie bezwładności, co pozwala na bardzo szybkie ruchy
układu odchylającego świetlną wiązkę roboczą. Dzięki temu rejestratory te mogą zapisywać
sygnały szybkozmienne, których częstotliwość może dochodzić do kilkuset herców. Metoda
ta jest jednak kosztowna. Sam rejestrator, ze względu na dokładność wykonania
oraz na konieczność stosowania układów ochrony przed przypadkowymi wibracjami, jest
bardzo drogi. Ponadto sam proces postępowania z nośnikami zapisanej informacji
i konieczność wywoływania filmów, dodatkowo podnosi koszty eksploatacji tego rejestratora.
Kolejnym sposobem rejestrowania danych jest zapis magnetyczny. Rejestrator
magnetyczny zapisuje doprowadzone do niego sygnały elektryczne, zamienione na wielkość
namagnesowania nośnika ferromagnetycznego. Może on rejestrować wielkości elektryczne
jak napięcie i natężenie prądu, a także wielkości nieelektryczne takie, jak np. ciśnienie lub
temperatura, ale muszą one być przekształcone na odpowiadające im proporcjonalne
wielkości elektryczne (napięcie lub prąd). Przykładami rejestratorów magnetycznych mogą
być praktycznie wszystkie magnetofony – czasem tylko trzeba dokonać niedużej zmiany
w ich układzie elektronicznym.
Rys. 31. Zapis magnetyczny: a) głowica magnetyczna, b) tworzenie pola magnetycznego
w szczelinie: 1 – rdzeń ferromagnetyczny, 2 – szczelina rdzenia, 3 – uzwojenie głowicy,
4 – warstwa ferromagnetyczna taśmy, 5 – elastyczne podłoże taśmy [1, s. 338]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Rejestratory tego typu używane są często jako tzw. „czarne skrzynki”. Budowa takiej
skrzynki jest bardziej skomplikowana niż magnetofonu kasetowego, ale zasada pracy taka
sama. Zapis głowicą magnetyczną na taśmie magnetycznej przedstawiony jest na rys. 31.
Taśma do zapisu magnetycznego wykonana jest z elastycznego podłoża (5) poliestrowego
lub z octanu celulozy. Podłoże to pokryte jest warstwą ferromagnetyczną (4) z tlenków
żelaza, (lub chromu itp.). Warstwa ta jest materiałem, który można dość „łatwo”
namagnesować. Ta warstwa ma „pamiętać” zapisywane dane. Podczas zapisywania danych
przez uzwojenie głowicy (3) płynie prąd elektryczny (proporcjonalny do wartości mierzonej
wielkości), wytwarzając w jej rdzeniu (1) pole magnetyczne o natężeniu proporcjonalnym do
natężenia prądu, a więc do wartości wielkości mierzonej. Pole to „wydostaje się na zewnątrz”
(poza rdzeń głowicy) poprzez szczelinę (2) w rdzeniu. Po czole głowicy i wspomnianej
szczelinie ślizga się, przesuwająca się taśma magnetyczna (rys. 31b). Zmienne pole
magnetyczne przed szczeliną „obejmuje” warstwę ferromagnetyczną taśmy (4), powodując jej
trwałe namagnesowanie. W taki sposób można rejestrować wartości różnych sygnałów
elektrycznych i nieelektrycznych przetransformowanych na wielkości elektryczne, zarówno
wolnozmiennych jak i zmieniających się szybko (zapisywane sygnały mogą mieć
częstotliwość dochodzącą do kilku MHz).
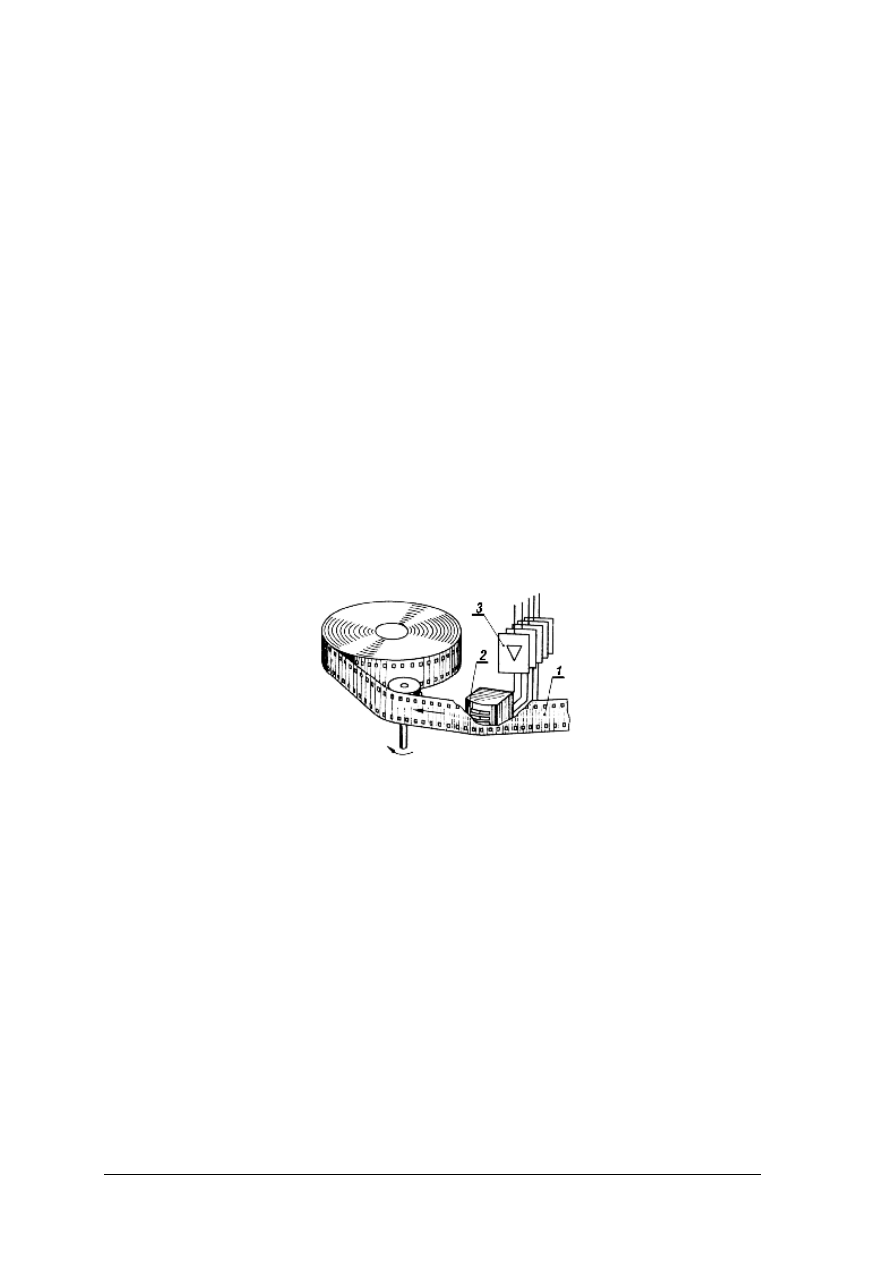
W przedstawiony sposób można zapisywać tylko sygnał jednokanałowy. Jeżeli konieczne
jest zapisywanie wielu sygnałów (a taka konieczność zachodzi we wspomnianych wcześniej
„czarnych skrzynkach”), to można zastosować sposób z rys. 32. W przedstawionym tutaj
profesjonalnym rejestratorze zapis jest dokonywany na taśmie magnetycznej o szerokości
35 mm z perforacją na brzegach. Taśma przesuwa się przed głowicą (2) ze stałą prędkością
(można ją ustawić w granicach od 10 do kilkuset mm/s).
Rys. 32.
Wielokanałowy rejestrator magnetyczny: 1 – taśma magnetyczna, 2 – głowica
wielościeżkowa, 3 – wzmacniacze sygnałów w kanałach [1, s. 339]
Głowica zastosowana w tym rejestratorze zbudowana jest z kilkunastu rdzeni (każdy
ze swoim uzwojeniem). Każda taka para – rdzeń i jego uzwojenie – spełnia funkcję osobnej
głowicy zapisującej jeden kanał. Wszystkie rdzenie i uzwojenia połączone są w jednej
obudowie, dlatego głowica taka nazywana jest tzw. „głowicą wielokanałową”. Na taśmie
magnetycznej każda głowica zapisuje swoje sygnału na swojej ścieżce, które ułożone są jedna
nad drugą na całej szerokości głowicy (z wyjątkiem perforacji). Taśma magnetyczna jest
nośnikiem, który mieści bardzo dużo danych, a ponadto po ich wykorzystaniu może być ten
nośnik wykorzystany ponownie, ponieważ pozwala na wielokrotne przemagnesowywanie,
czego nie można zrobić z taśmą papierową.
Obsługa rejestratorów
Rejestratory najczęściej montowane są w tablicach kontrolnych zawierających różne
przyrządy pomiarowe, elementy regulacyjne itp. Rejestrator punktowy Feutron PT 100
Ω
jest
urządzeniem przeznaczonym do zapisu trzech wielkości: wilgotności oraz dwóch temperatur,
przekazywanych mu jako wielkości elektryczne. Jest on przedstawiony na rys. 33. Rejestrator
taki należy zamontować w przewidzianym do tego miejscu, podłączyć do niego zasilanie –

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
najczęściej z sieci przemysłowej (230 V). Następnie należy podłączyć czujniki pomiarowe do
wejść (We1, We2, We3; od góry: wilgotności, termometru i termometru „suchego), a także
zasilania napięciem stałym (biegun „+” do zacisku „+6 V”, a biegun „–” do lewych zacisków
wejść pomiarowych). Następnie należy założyć papier na miejsce rolki podającej. Przełożyć
go przez rolki ciągnące (z zębami prowadzącymi) oraz prowadnice papieru i założyć
poprawnie na rolkę nawijającą. Następnie należy wsunąć mechanizm przesuwu papieru do
środka. Włączyć zasilanie rejestratora oraz odblokować mechanizm zapisu. Mechanizm
zacznie swoją pracę rejestrując trzy parametry na taśmie papierowej.
Rys. 33.
Rejestrator punktowy Feutron Pt 100
Ω
: a) panel przedni, b) zaciski
przyłączeniowe z tyłu [opracowanie własne]
Przy rejestratorach tego typu muszą być okresowo wykonywane czynności obsługowe.
Należy do nich m.in. wymiana papieru, który należy wymieniać tylko na wyrób odpowiedniej
jakość: suchy, czysty i nieuszkodzony (nie pogięty, poprzerywany itp.). Papier należy
zakładać bardzo starannie, aby przesuwał się on w swoich prowadnicach bez zacięć.
Okresowo musi być regulowane sprzęgło cierne napędu rolki nawijającej, ponieważ od jego
ustawienia zależy czy mechanizm rwie perforację (tarcze sprzęgła za mocno dociśnięte –
ciągnie ono zbyt mocno) lub papier na rolce nawijającej jest zbyt luźny („niedociągnięte”
sprzęgło). W tym rejestratorze jest taśma barwiąca, więc co określony okres należy wymienić
ją na nową. W rejestratorach „piszących” pisak musi być przemywany letnią wodą (lub
alkoholem etylowym – denaturat zostawia niepożądane osady) oraz należy uzupełniać zapas
atramentu (jeśli atrament jest w zbiorniczku, z którego jest on doprowadzany do pisaka rurką
włoskowatą, to najczęściej wystarcza uzupełnianie go raz w miesiącu). Mechanizmy ruchome
(przekładnie, łożyska, prowadnice itp.) należy okresowo czyścić (np. suchym i czystym
sprężonym powietrzem, ale o niezbyt dużym ciśnieniu, albo środkami w sprayu), a następnie
nasmarować (łożyska i przekładnie) niewielką ilością oleju do mechanizmów precyzyjnych.
Potencjometry pomiarowe należy czyścić tylko w taki sposób jak zaleca to producent
regulatora (na pewno nie można używać do tego spirytusu denaturowanego, ani benzyny
lakowej – zostawiają osady, które zmieniają ich rezystancję).
Rys. 34. Rejestrator typu MPI–G (prod. Metronic): a) widok ogólny, b) ścianka tylna z gniazdami
do podłączenia rejestrowanych sygnałów [Metronic: MPI–G Wielokanałowy Rejestrator
Elektroniczny – Karta katalogowa, Metronic, Kraków 2007, www.metronic.pl, s. 1, 6]
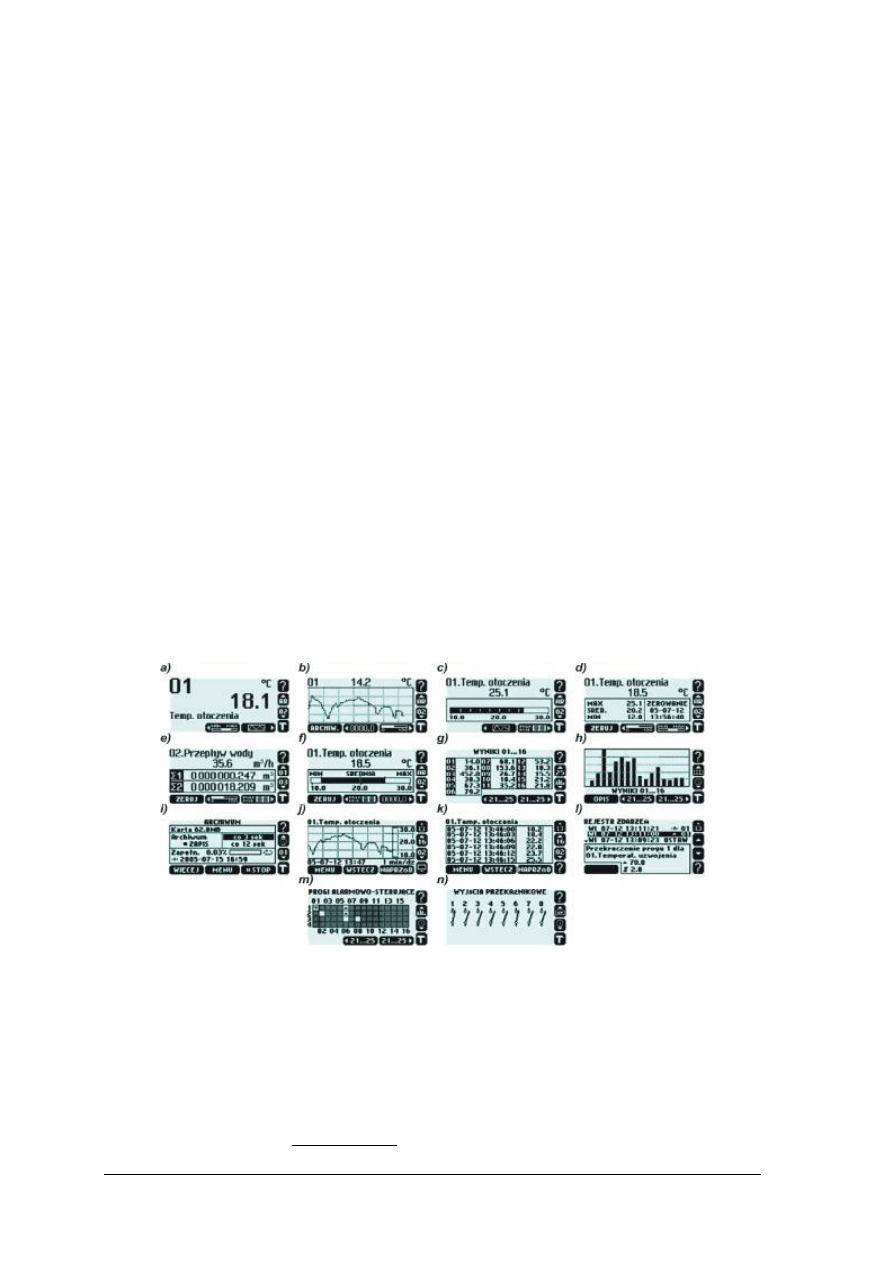
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Przedstawione typy rejestratorów są w użyciu w wielu zakładach produkcyjnych
i instytucjach. Odpowiednio konserwowane, pracują i pracować będą niezawodnie jeszcze
wiele lat. Dziś nowo projektowane i konstruowane rejestratory zastępują większość urządzeń
mechanicznych (szybko zużywających się) przez rejestratory elektroniczne, których
konstrukcja wykorzystuje technikę cyfrową i cyfrową rejestrację danych. Na rys. 34
przedstawiono rejestrator MPI–G, będący przykładem elektronicznego rejestratora cyfrowego
rodzimej produkcji. Charakteryzują go następujące właściwości:
a) ma 16 lub 8 wejść analogowych (w zależności od zamówionej wersji):
—
do których można podłączyć czujniki temperatury RTD (typu Pt–100, Ni–100 itp.),
TC (różnych typów),
—
które można użyć do pomiaru innych wielkości w standardzie pętli prądowej
4÷20 mA lub 0–20 mA,
—
które można użyć do pomiaru rezystancji w zakresie 0÷4000
Ω
, przy napięciach
w zakresie –120 mV ÷ +120 mV,
b) ma 4 wejścia dwustanowe z możliwością pomiaru częstotliwości na dwóch wybranych,
c) ma 8 wyjść do włączania alarmów,
d) rejestrowane sygnały i wszystkie komunikaty sygnalizuje na graficznym wyświetlaczu
LCD z podświetlaniem,
e) rejestracja wyników pomiarów przeprowadzana jest na wymienialnych kartach pamięci
flash MMC o pojemności 128 lub 512 MB,
f) ma port RS–485 obsługujący protokoły ASCII i Modus RTU do komunikacji
z komputerem nadrzędnym,
g) wyposażony jest w oprogramowanie do współpracy z komputerem typu IBM–PC
i obróbki danych pomiarowych oraz ich wizualizacji różnymi sposobami.
O możliwościach samego rejestratora świadczy bogactwo sposobów przedstawiania
danych na jego ekranie, co ilustruje rys. 35.
Rys. 35.
Ekran LCD rejestratora MPI–G wyświetlający: a) cyfrowo temperaturę, b) wykres
zmian temperatury, c) temperaturę wskaźnikiem paskowym, d) temp. maksymalną,
minimalną i średnią (od ostatniego zerowania), e) przepływ wody cyfrowo i jej zużycie,
f) temp. otoczenia (wskaźnikiem liniowym wartości min., max. i śred.), g) lista
wyników pomiarów z 16–u wejść pomiarowych, h) wyniki pomiarów z 16–u wejść
w postaci histogramu, i) wyniki pomiarów zapisanych w archiwum, j) wykres zmian
temperatury (ustawienie pomiaru co 1 min.), k) lista zapisów temp. otoczenie
z kolejnych pomiarów, l) lista dat i czasów zarejestrowanych zdarzeń, m) ustawianie
progów alarmowych, n) obraz stanu wyjść przekaźnikowo–alarmowych. [Metronic:
MPI–G Wielokanałowy Rejestrator Elektroniczny – Karta katalogowa, Metronic,
Kraków 2007, www.metronic.pl, s. 1, 2]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Rejestrator przeznaczony jest do:
a) wielopunktowych pomiarów temperatury oraz innych wielkości fizycznych z lokalnym
wyświetlaniem wyników,
b) transmisji mierzonych danych do komputera nadrzędnego (typu IBM–PC) lub
sterującego jego pracą,
c) rejestracji wyników pomiarów z prostym sterowaniem i sygnalizacją alarmową,
d) zabudowy w szafach (lub pulpitach) pomiarowych.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje współcześnie używanych rejestratorów?
2. Jak działa rejestrator ciągły mechaniczny?
3. Jak działa rejestrator punktowy?
4. Jak działa rejestrator kompensacyjny?
5. Jak działa rejestrator magnetyczny?
6. Jakie są czynności obsługowe wykonywane przy rejestratorach mechanicznych
zapisujących na taśmie papierowej?
7. W jaki sposób sprawdzenia się działanie rejestratora typu Feutron Pt 100
Ω
?
8. Jakie są podstawowe cechy współczesnych rejestratorów elektronicznych?
4.3.3. Ćwiczenia
Ćwiczenie 1
Rozpoznaj rodzaj rejestratora.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) poddać oględzinom wzrokowym rejestrator wskazany przez nauczyciela,
2) sprawdzić czy w rejestratorze jest układ prowadzenia taśmy papieru,
3) sprawdzić czy jest w nim zawieszone elastycznie ramię i kabłąk stawiające kropki,
4) sprawdzić rodzaj wejść (elektryczne, ciśnieniowe itp.),
5) odczytać z tabliczki znamionowej typ rejestratora i sprawdzić jego dokumentację
techniczną.
Wyposażenie stanowiska pracy:
–
kilka rejestratorów różnych typów,
–
elementy wyposażenia rejestratorów,
–
instrukcje obsługi rejestratorów.
Ćwiczenie 2
Przeanalizuj czynności obsługowe rejestratorów mechanicznych i elektromechanicznych.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wybrać wskazany przez nauczyciela rejestrator oraz zapoznaj się z jego dokumentacją
techniczną.
2) wybrać czujniki, które należy podłączyć do tego rejestratora,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
3) podłączyć elementy symulujące czujniki (jeśli są one stosowane zamiast czujników) oraz
zasilanie,
4) założyć do rejestratora taśmę papierową i prawidłowo przeprowadzić ją przez mechanizm
prowadzenia taśmy,
5) włączyć zasilanie, uruchomić rejestrator oraz sprawdzić jego działanie.
Wyposażenie stanowiska pracy:
–
rejestratory mechaniczne z instrukcjami obsługi,
–
czujniki pomiarowe ciśnienia, temperatury, siły itp. (w zależności od typu rejestratorów
na stanowisku),
–
materiały eksploatacyjne: papier w rolkach, atrament, tusz lub taśma barwiąca
(w zależności od potrzeb).
Ćwiczenie 3
Przedstaw sposób przygotowania do pracy rejestratora elektronicznego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) omówić sposób podłączania ciśnienia, temperatury, ruchu itp. do rejestratora,
2) przedstawić sposoby ustawienia trybu pracy regulatora–z wykorzystaniem instrukcji dla
użytkownika,
3) omówić rodzaje stosowanych w rejestratorze nośników i sposób zapisu na nich
mierzonych danych.
Wyposażenie stanowiska pracy:
–
rejestrator elektroniczny z instrukcją obsługi,
–
czujniki pomiarowe i alarmowe.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić, co to jest rejestrator?
2)
określić rodzaje stosowanych rejestratorów?
3)
wyjaśnić budowę i działanie rejestratora ciągłego?
4)
przedstawić ogólną budowę i działanie rejestratora
punktowego?
5)
przedstawić działanie rejestratora kompensacyjnego?
6)
przedstawić sposób pracy rejestratora magnetycznego?
7)
określić sposoby obsługi rejestratorów mechanicznych?
8)
przygotować do pracy rejestrator ciągły i punktowy?
9)
przygotować rejestrator elektroniczny do pracy?
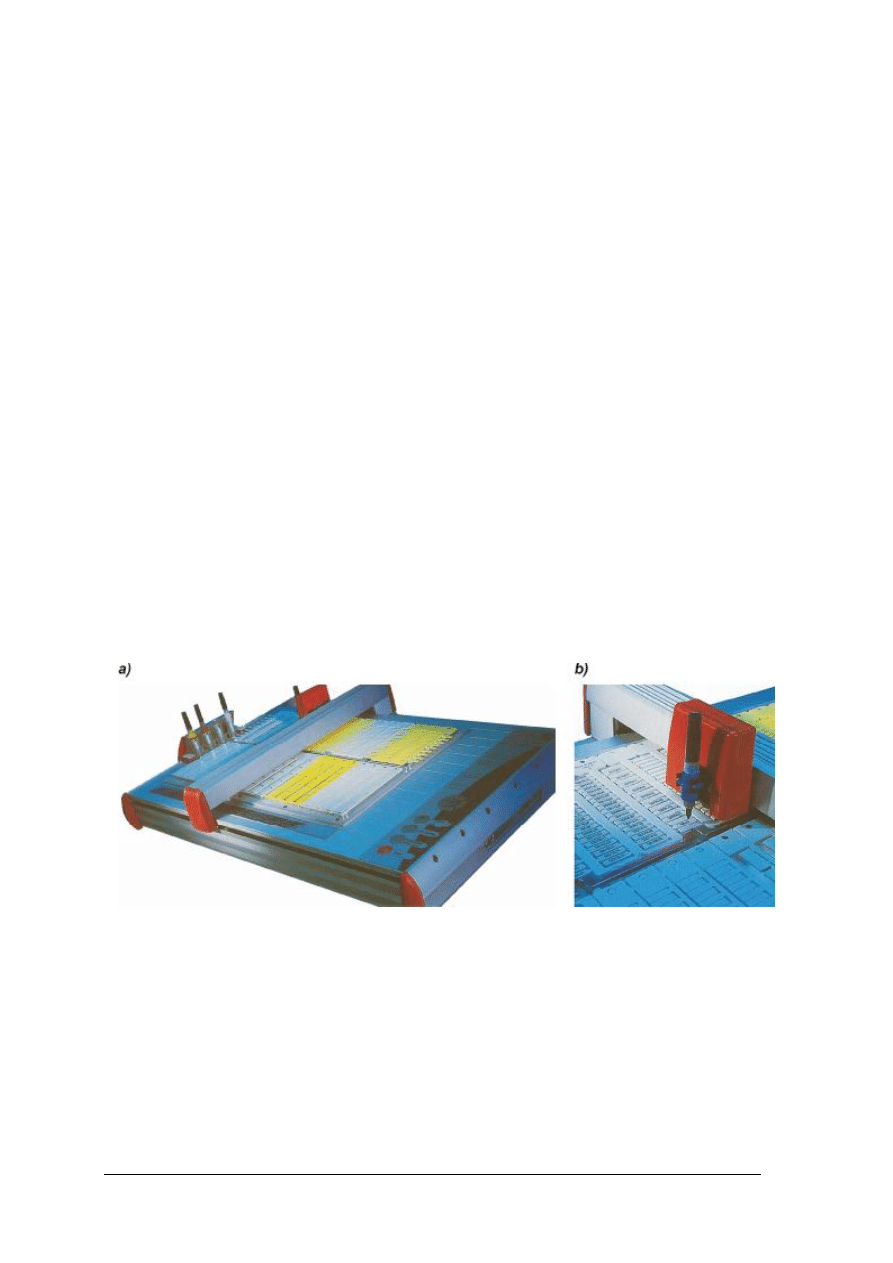
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
4.4. Plotery
4.4.1. Materiał nauczania
Ploter jest komputerowym urządzeniem peryferyjnym, przeznaczonym do kreślenia
rysunków wektorowych na powierzchniach płaskich, za pomocą specjalnego pisaka
przesuwanego we współrzędnych X–Y. Głównym przeznaczeniem tego urządzenia, było
kreślenie rysunków technicznych, które powstały podczas prac konstruktorskich
z wykorzystaniem programów wspomagania projektowania (CAD – ang. Computer Aided
Design). W trakcie lat korzystania z ploterów następował ciągły rozwój techniki
poligraficznej, a więc m.in. techniki drukowania – zarówno atramentowego, jak i laserowego.
Urządzenie, jakim ploter był pierwotnie, znacznie się zmieniło. Zamiast pisaka, zastosowano
w ploterze inne sposoby nanoszenia obrazów na papier – głowicę drukującą atramentem oraz
mechanizm druku laserowego. Współcześnie używane plotery można podzielić następująco:
a) ze względu na sposób prowadzenia papieru:
—
ploter płaski,
—
ploter bębnowy,
b) ze względu na zastosowanie plotery:
—
nanoszące obraz na materiał: kreślący (X–Y), atramentowy, solwentowy, laserowy,
—
grawerujące,
—
tnące.
Ploter płaski jest to taki ploter, w którym papier (kalka techniczna, folia itp.) jest
rozłożony płasko na specjalnie do tego przeznaczonym pulpicie (stole, trzymaku itp.), a nad
nim przesuwa się głowica z urządzeniem nanoszącym obraz (lub też grawerującym albo
tnącym). Przykład takiego plotera przedstawia rys. 36. Na przedstawionej ilustracji ploter ten
nanosi symbole i napisy na płaskie powierzchnie wyprodukowanych elementów.
Rys. 36.
Ploter płaski typu MVPS–G3: a) wygląd, b) przykład pracy pisaka na powierzchni
płaskich wyrobów przemysłowych [Murrplastik, Ploter MVPS–G3 – ulotka
reklamowa, POLTECHNIK Sp. z o.o., Wrocław 2007, s. 1]
W ploterze bębnowym poprzeczka z przesuwaną wzdłuż niej głowicą jest zamocowana
nieruchomo nad osią bębna. Natomiast bęben, obracając się, przesuwa papier (lub kalkę
techniczną albo inne podłoże płaskie) nawinięty na nim i dociskany do niego rolkami. Takie
rozwiązanie pozwala uzyskiwać rysunki znacznej szerokości (rys. 37). Ploter typu bębnowego
wykonuje sześć podstawowych operacji: obrót bębna w przód, obrót bębna w tył, wózek
w lewo, wózek w prawo, pióro do góry, pióro w dół, a odpowiednie kombinacje pierwszych
czterech operacji pozwalają na wykonywanie ruchów pióra względem papieru, w kierunkach
osi X–Y oraz 45° od osi X oraz Y. Każdy inny kierunek rysowania otrzymywany jest poprzez
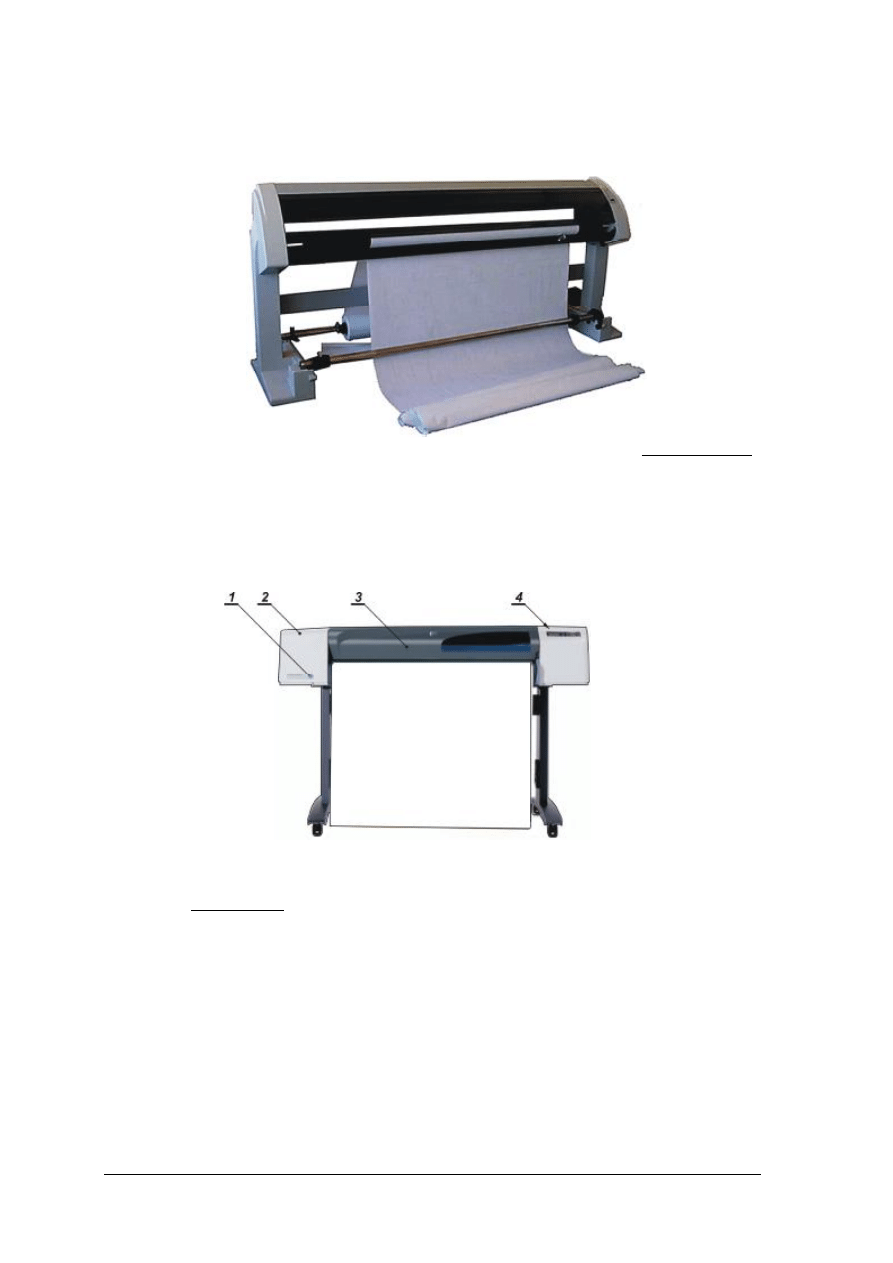
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
aproksymację, która polega na zastąpieniu linii prostej łamaną składającą się z odcinków
o długości jednego kroku i kierunku najbardziej zbliżonym do kierunku linii. Im kroki mają
mniejszą długość, tym dokładność rysunków jest większa – mają one większą rozdzielczość.
Rys. 37. Wielkoformatowy ploter bębnowy atramentowy [oprac. własne na podst. www.wikipedia.pl]
Ploter atramentowy, jest to urządzenie nie różniące się w swojej konstrukcji od drukarki
atramentowej (z wyjątkiem swoich rozmiarów), służące do nanoszenia na papier (lub inny
nośnik) zarówno grafiki wektorowej jak i rastrowej (rys. 38). Ploter ten jest atramentową
drukarką wielkoformatową, zapewniającą wydruk zarówno rysunków technicznych, jak
i obrazów z fotograficzną dokładnością.
Rys. 38. Ploter bębnowy atramentowy HP Designjet 500/800 Series: 1 – włącznik zasilania,
2 – elektroniczne układy sterujące (z osłoną), 3 – układ druku i prowadzenia
nośnika (z osłoną), 4 – panel sterowania [opracowanie na podstawie
www.hp.compl]
Charakterystyka plotera HP Designjet 500/800 Series jest następująca:
a) technologia tworzenia obrazu: termiczny druk atramentem pigmentowym, z czterema
osobnymi kartridżami (czarny, błękitny, purpurowy, żółty),
b) jakość druku: rozdzielczość do 1200 x 600 dpi, minimalna grubość linii: 0,04 mm,
precyzja pozycjonowania linii: ±0,2%,
c) języki drukowania: HP–GL/2; HP–PCL3–GUI; w niektórych wersjach: przez dołączony
programowy procesor obrazu Adobe Postscript 3,
d) pamięć RAM: 32 MB (z możliwością rozszerzenia do 160MB),
e) rodzaj nośnika obrazu – wydruk jest możliwy na: papierze (zwykłym, Inkret, coated,
heavycoated, o wysokim połysku, lekko błyszczący, fotograficzny), folii (Clear film,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Matte film),
f) rozmiary nośników wydruków: arkusze pojedyncze: od A4 do A1 (maksymalny rozmiar
zależny jest od wersji plotera), arkusze nietypowe: od 210x 210 mm, do 1067x15240 mm
(dla HP DJ 500ps Plus), długość papieru z rolki: do 45,7m, szerokość papieru: do 61 cm
lub do 107 cm (w zależności od wersji plotera),
g) interfejsy: port równoległy Centronics zgodny z normą IEEE–1284 (ECP), port USB
(zgodny ze specyfikacją USB 2.0).
Przed przystąpieniem do wykonywania wydruków rysunków technicznych lub innych
obrazów, należy ploter odpowiednio połączyć do komputera sterującego nim i skonfigurować.
W tym celu trzeba:
a) zamontować nogi do plotera, urządzenia podtrzymania i podawania papieru oraz ustawić
w pozycji roboczej (zgodnie z instrukcją użytkownika),
b) podłączyć ploter do zasilania sieciowego (najlepiej poprzez tzw. zasilającą listwę
filtrująco–przeciwprzepięciową),
c) uruchomić komputer z zainstalowanym systemem operacyjnym (i pozostałym
oprogramowaniem typu CAD lub Desktop Publishing),
d) zainstalować sterownik plotera w systemie:
—
włożyć do czytnika CD/DVD–ROM płytę z oprogramowaniem,
—
wykonać polecenia instalacyjne pojawiające się na ekranie,
—
we wskazanym memencie podłączyć do plotera i do komputera kabel połączeniowy;
USB (wskazane) lub Centronics (możliwe, ale nie polecane),
—
wykonać pozostałe czynności instalacyjne (zgodnie z poleceniami na ekranie),
e) od tego momentu ploter i komputer do którego go podłączono są gotowy do pracy.
Wykonywanie
wydruków
schematów,
rysunków
technicznych
odbywa
się
z wykorzystaniem języka HP–GP/2, natomiast pozostałe dokumenty i rysunki tzw.
„bitmapowe” z wykorzystaniem HP–PCL3–GUI. Wykonuje się to tak samo jak wydruk
każdego innego dokumentu na drukarce atramentowej, laserowej, czy innej. Oprócz ploterów
HP są one produkowane również przez inne firmy (np. przez Canon, Epson, Roland, i in.).
Oprócz drukowania i „kreślenia” rysunków, mogą one wykonywać jeszcze inne prace – np.
nanosić
na
wydrukowane
rysunki
warstwy
zabezpieczające
przed
wpływami
atmosferycznymi, blaknięciem kolorów itp. Głowica może nanosić te warstwy, tylko wtedy,
gdy zostanie ona skonstruowana w sposób umożliwiający takie działanie. Plotery takie są
stosowane w pracach biur projektowych, geodezyjnych, jak również w poligrafii, a nawet
w pracach biurowych. Zdarzają się też takie urządzenia, które mogą mieć wymienianą
głowicę drukującą na głowicę tnącą albo mają równocześnie zamontowane obie głowice – są,
więc ploterami drukująco–tnącymi.
Ploter solwentowy drukuje grafiki za pomocą specjalnej rozpuszczalnikowej farby
solventowej, opartej na cykloheksanolu. Dzięki temu obraz trwale łączy się z podłożem,
wnikając w jego strukturę. Wydruki takie są odporne na promieniowanie UV, uszkodzenia
mechaniczne, ścieranie, zróżnicowane warunki atmosferyczne, ekstremalne różnice
temperatur. Dlatego też takie plotery stosowane są do wydruków na tablicach reklamowych,
samochodach, banerach, bilboardach, kasetonach, cityboardach, citylightach, flagach oraz do
wykonywania wydruków pełnokolorowych na plandekach samochodów z naczepami.
Ploter laserowy jest to drukarka laserowa. Praca jego polega na przyciąganiu się różnych
ładunków elektrycznych oraz na zjawiskach zachodzących pod wpływem światła
w elementach światłoczułych. Promień świetlny emitowany przez laser małej mocy, odbijany
za pomocą zespołu zwierciadeł, trafia na wcześniej naładowany światłoczuły bęben selenowy
(lub inny). Wiązka lasera punktowo rozładowuje powierzchnię bębna i tworzy obraz
drukowanej strony. Po naświetleniu jednej linii bęben obraca się. Cząsteczki tonera
zawierające żelazo są przyciągane do tych miejsc bębna, które odpowiadają zadrukowanym
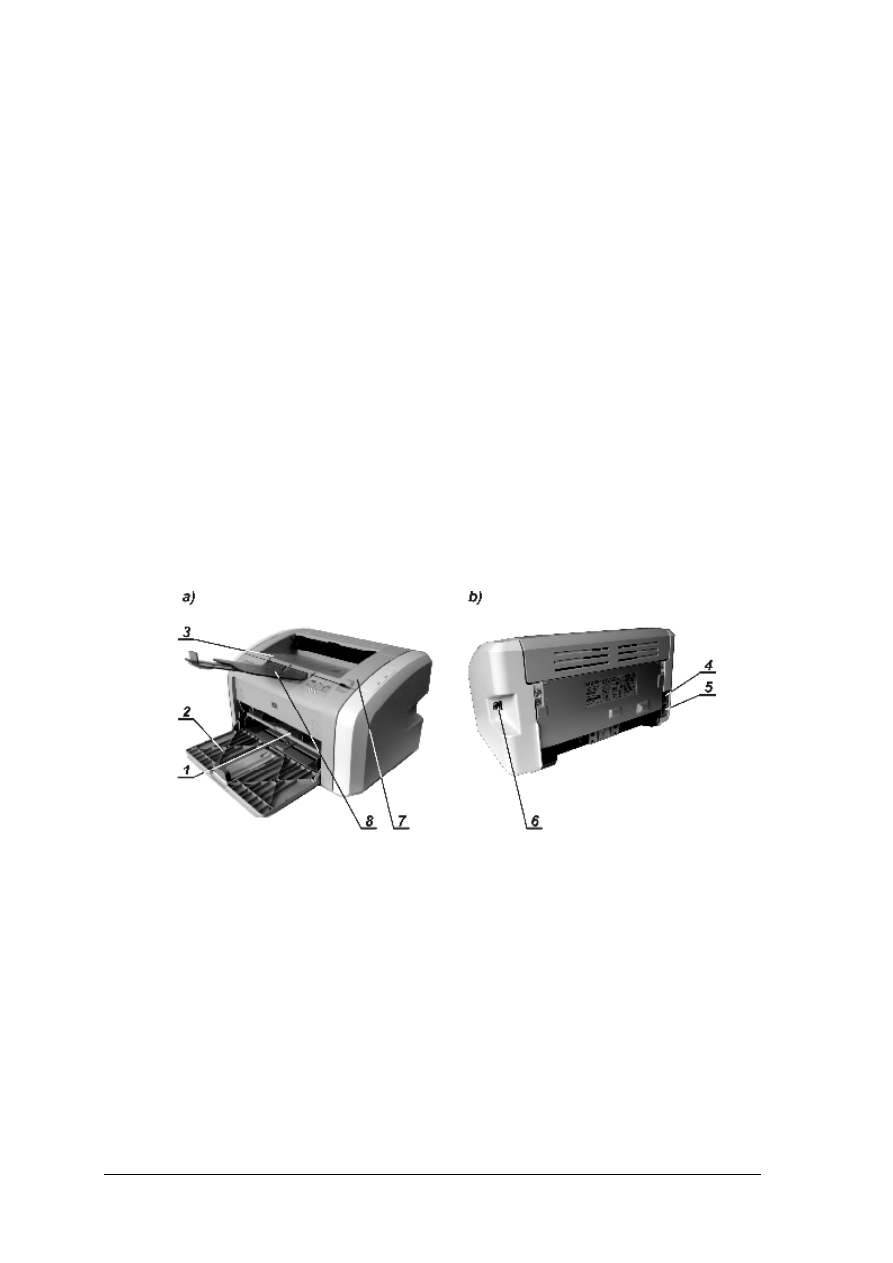
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
punktom. Jednocześnie papier ładowany jest ładunkiem elektrycznym przesuwając się
w pobliżu drutu pod napięciem, który elektryzuje go. Obrót bębna powoduje, że pokryte
tonerem miejsca stykają się z powierzchnią papieru. Naładowany papier ma potencjał o tym
samym znaku, co bęben, lecz o większej wartości. Dzięki temu cząsteczki tonera są odrywane
od powierzchni bębna i osiadają na papierze. Zadrukowany papier jest przeciągany pomiędzy
wałkami elementu utrwalającego (topią one żywicę zawartą w tonerze i wprasowują toner
w papier). Proces drukowania kończy się rozładowaniem bębna i usunięciem resztek tonera
z jego powierzchni oraz rozładowaniem zadrukowanego arkusza papieru. Do czyszczenia
bębna używa się pompy próżniowej lub listwy czyszczącej. Plotery laserowe są szybkie,
pracują cicho i mogą być używane jako drukarki tekstowe wysokiej klasy. Są one jednak dość
drogie.
Rysunki techniczne wykonywane na niedużych formatach (A5, A4) w wersjach czarno
białych mogą być drukowane na drukarkach laserowych – nawet tych najmniejszych –
domowych. Mają one taką rozdzielczość, że z powodzeniem się do tego nadają. Jedną
z takich prostszych drukarek, którą można do tego wykorzystać, jest drukarka domowa
HP LaserJet 1020. Jej podstawowe dane, to:
a) rozdzielczość: 1200x600 dpi (1200x1200 z włączoną technologią Ret.),
b) formaty wydruku: B5, A6, A5, A4,
c) nośniki wydruku: papier zwykły, koperty, folie do przeźroczy, kartony, karty pocztowe,
etykiety – dla drukarek laserowych,
d) przygotowanie wydruku: GUI – sterownik programowy w komputerze sterującym,
e) interfejsy: port USB (zgodny ze specyfikacją USB 2.0).
Ta drukarka laserowa przedstawiona jest na rys. 39.
Rys. 39. Drukarka HP LaserJet 1020 jako domowy ploter: a) widok z przodu, b) widok z tyłu:
1 – otwór szybkiego podawania, 2 – główny podajnik, 3 – pojemnik wyjściowy, 4 – włącznik
zasilania, 5 – gniazdo zasilania, 6 – port USB, 7 – drzwiczki kasety drukującej, 8 – podpórka
pojemnika wyjściowego [opracowanie własne]
Wykorzystanie drukarki jako plotera sprowadza się do włączenia jej, zainstalowania
sterowników dla systemu operacyjnego MS Windows (zgodnie z pojawiającymi się
poleceniami na ekranie). Wydruk przeprowadza się wydając polecenie wydruku z programu
typu CAD (lub podobnego) na ogólnych zasadach przyjętych w tym systemie.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Do jakich prac można zastosować ploter?
2. Co różni poszczególne rodzaje ploterów?
3. Jak działa ploter płaski?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
4. Co charakteryzuje ploter bębnowy?
5. Czym charakteryzuje się ploter atramentowy?
6. Co charakteryzuje ploter laserowy?
7. Jakie są czynności obsługowe wykonywane przy ploterze laserowym?
4.4.3. Ćwiczenia
Ćwiczenie 1
Zainstaluj sterownik plotera w systemie MS Windows.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć ploter do komputera, uruchomić komputer, system operacyjny MS Windows
i zalogować się jako administrator (lub na konto z uprawnieniami administratora),
2) włożyć do czytnika CD–ROM (lub DVD–ROM) płytę ze sterownikiem plotera,
3) wykonać wszystkie polecenie pojawiające się na ekranie komputera (np. podłączenia
plotera do portu USB, portu RS–232 itp., włączenia zasilania plotera, włożenia kartki
do plotera itp.),
4) wykonać testowy rysunek.
Wyposażenie stanowiska pracy:
–
komputer osobisty typu IBM–PC z zainstalowanym systemem operacyjnym
MS Windows,
–
ploter z pełnym wyposażeniem (sterowniki na płycie CD–ROM, kable połączeniowe
i zasilające,
–
papier do plotera.
Ćwiczenie 2
Przeanalizuj wykorzystanie drukarki laserowej jako plotera.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) uruchomić komputer osobisty typu IBM–PC i zalogować się do systemu,
2) uruchomić program typu CAD (lub inny pozwalający na wczytanie rysunku
technicznego),
3) wydać polecenie wydruku (najczęściej Ctrl–P lub klikając na ikonę wydruku, ale
bezpieczniejsza jest pierwsza opcja, bo często kliknięcie na ikonę uruchamia wydruk
natychmiastowy bez możliwości zmiany parametrów wydruku),
4) ustawić w otwartym oknie wydruku parametry wydruku (rozdzielczość, jakość wydruku
itp. w zależności od typu drukarki),
5) kliknąć w oknie wydruku na przycisku OK (lub DRUKUJ albo WYKONAJ–
w zależności od wersji sterownika).
Wyposażenie stanowiska pracy:
–
komputer osobisty typu IBM–PC z zainstalowanym systemem operacyjnym MS–
Windows i programem CAD lub CorelDRAW i sterownikiem podłączonej drukarki
laserowej,
–
drukarka laserowa podłączoną do komputera,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
–
papier do drukarki.
Ćwiczenie 3
Przeanalizuj sposób wykonania rysunku na ploterze wielkoformatowym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować instrukcję obsługi plotera np. serii HP DesignJet 500 (lub 800),
2) ustalić sposób podłączenia plotera np. serii HP DesignJet 500 (lub 800) do komputera
typu IBM–PC,
3) przedstawić sposób wykonania wydruku na papierze wielkoformatowym (w zależności
od typu plotera–do wielkości A1, A0),
4) przedstawić uzasadnienie potrzeby stosowania tak dużych ploterów,
5) zaprezentować korzyści płynące ze stosowania drukarki wielkoformatowej jako plotera.
Wyposażenie stanowiska pracy:
–
komputer z ploterem wielkoformatowym (lub dostępem do Internetu),
–
instrukcje obsługi ploterów wielkoformatowych.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić, co to jest ploter?
2)
scharakteryzować rodzaje produkowanych i używanych
obecnie ploterów.
3)
scharakteryzować
ogólną
budowę
plotera
atramentowego?
4)
scharakteryzować
przygotowanie
plotera
wielkoformatowego do pracy?
5)
wyjaśnić ogólną budowę plotera laserowego?
6)
wyjaśnić sposób instalacji w systemie MS Windows
sterownika plotera?
7)
wykonać wydruk rysunku technicznego na ploterze?
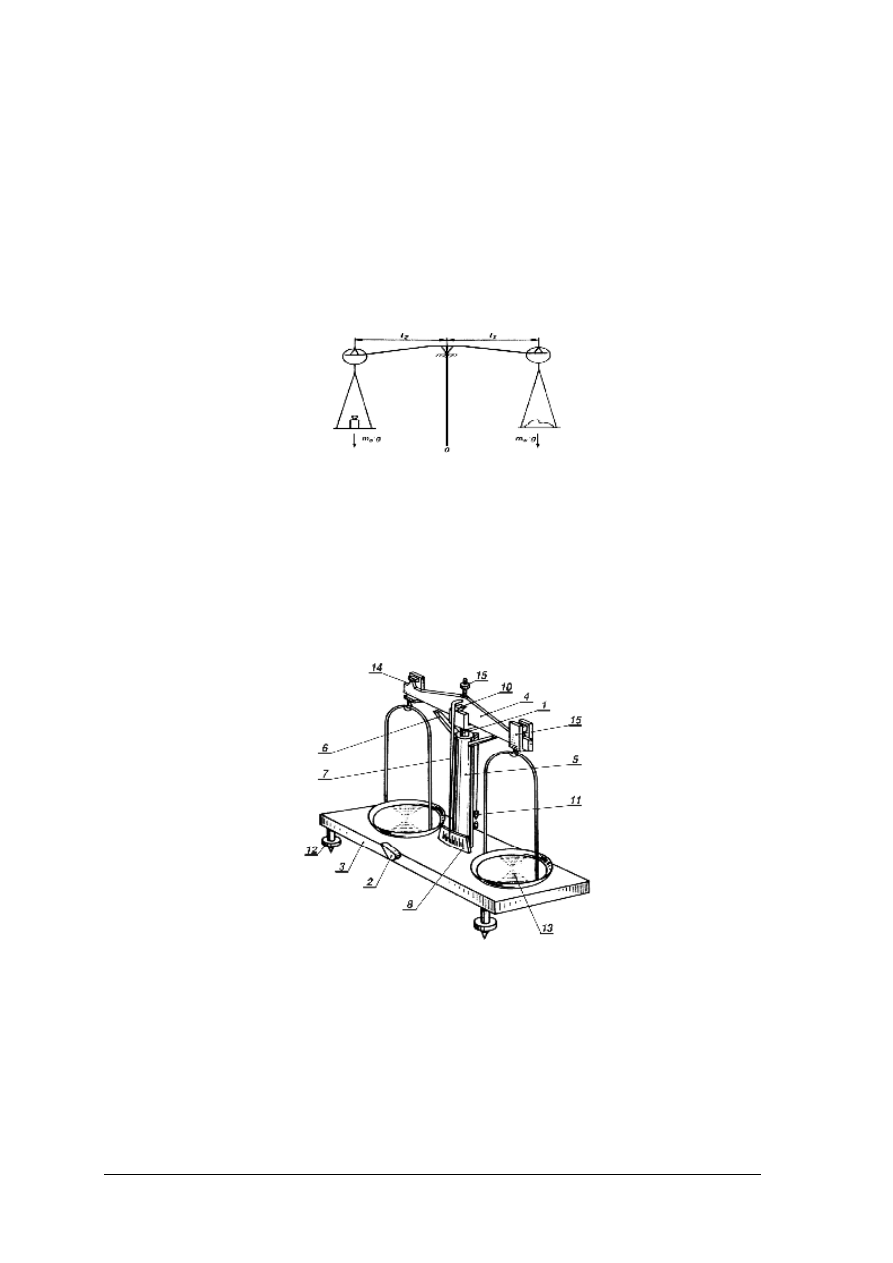
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
4.5. Wagi i kasy fiskalne
4.5.1. Materiał nauczania
Wagi klasyfikuje się ze względu na zasadę działania, dokładność lub zastosowanie. Ze
względu na zasadę działania wyodrębnić można: mechaniczne (odważnikowe, uchylne,
przesuwnikowe,
sprężynowe),
elektromechaniczne,
elektryczne,
radiacyjne.
Wagi
odważnikowe są stosowane jako wagi różnorodnego przeznaczenia – zarówno jako wagi
handlowe (teraz już dość rzadko), jako wagi laboratoryjne i inne. Zasadę działania wagi
dźwigniowej równoramiennej przedstawia rys. 40.
Rys. 40. Zasada działania wagi dźwigniowej równoramiennej [10, s. 447]
Dźwignia wagi jest umocowana na środku, w ten sposób, że ramiona l
1
i l
2
są równe.
W takich odległościach od środkowego punktu podparcia zawieszone są na belce szalki. Na
prawą szalkę działa siła
g
m
F
w
w
⋅
=
materiału ważonego. Ponieważ ramiona (l
1
i l
2
) są
równe, to w celu zrównoważenia na drugą szalkę muszą działać siłą
g
m
F
o
o
⋅
=
odważniki.
Zrównoważenie tej wagi powoduje, że suma masy odważników jest równa masie ważonego
materiału. Takie wagi są najczęściej używane w laboratoriach, (np. farmaceutycznych)
i nazywane są wagami dźwigniowymi laboratoryjnymi (taką wagę pokazano na rys. 41).
Rys. 41.
Dźwigniowa waga laboratoryjna: 1 – kolumna z panewką noża, 2 – pokrętło podnoszenia
kolumny, 3 – podstawa wagi, 4 – belka wagi, 5 – osłona kolumny, 6 – zderzaki belki,
7 – wskazówka, 8 – podziałka wagi, 9 – ciężarek regulacji środka ciężkości belki, 10 – nóż
łożyskowania belki, 11 – pion, 12 – nóżki z pokrętłami, 13 – szalka wagi, 14 – nóż
zawieszenia szalki, 15 – panewka z hakiem zawieszenia szalki [1, s. 184]
Są precyzyjne i delikatne, więc potrzebna jest ochrona ruchomych elementów
zawieszenia takich jak noże i panewki noży. Z tego powodu w stanie spoczynkowym noże nie
opierają się w panewkach – pokrętło (2) znajduje się w stanie spoczynkowym powodując, że
osłona kolumny (5) wraz ze zderzakami (6) uniesiona jest do góry w takim stopniu, iż
podnosi belkę (4). Wtedy nóż (10) nie opiera się ostrzem w swojej panewce, ponieważ jest
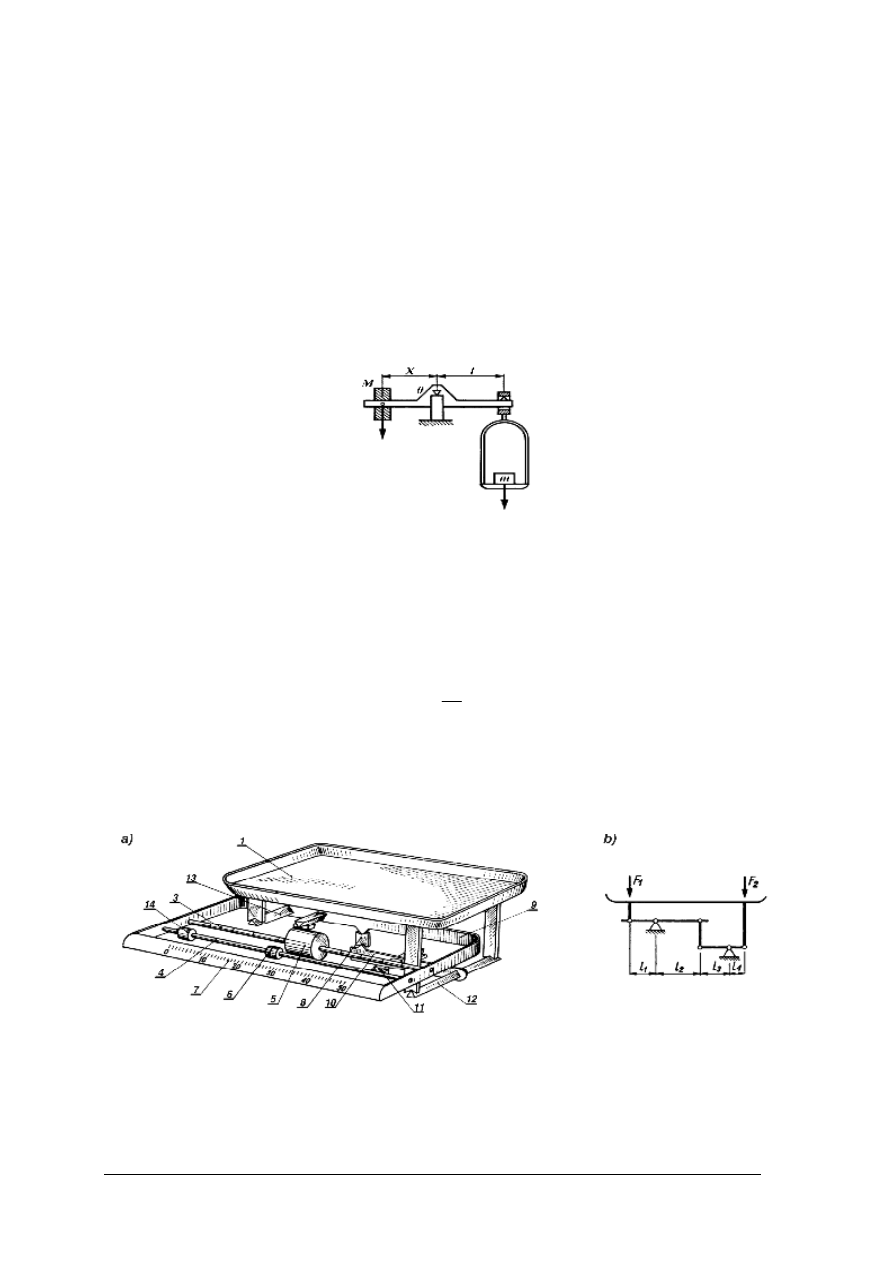
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
uniesiony w górę. W takim wypadku łożysko nożowe jest nieobciążone (będąc w stanie
spoczynku) i jego ostrza nie zużywają się W większości wag laboratoryjnych jest mechanizm
odciążania noży i panewek zawieszenia szalek. Mechanizm taki uruchamiany jest pokrętłem
(2). Ukryty jest on pod podstawą (3). Poprzez wycięcia w podstawie, unosząc w górę dwie
okrągłe podpory, podnosi obie szale w górę tak, że również ich zawieszenia nie są obciążone.
Górna granica ważonych mas taką wagą wynosi 500g z dokładnością nie większą niż ok.
10mg.
Wagi przesuwnikowe są wagami dźwigniowymi. Nie są one jednak wagami
odważnikowymi. Waga ma przeciwciężar, ale jest on stały (niezmieniający się). Zmienne jest
jego położenie na ramieniu dźwigni X względem punktu podparcia O (osi obrotu). W ten
sposób jest zmieniana długość ramienia, na którym działa siła przeciwciężaru M (tzw.
„stałego odważnika”). Schematycznie waga taka przedstawiona jest na rys. 42.
Rys. 42. Schemat wagi dźwigniowej przesuwnej [1, s. 191]
Równowaga w każdej wadze dźwigniowej opiera się na założeniu równowagi sił
działających na oba ramiona, a więc zgodnie z tym, w przypadku tej wagi prawdziwa jest
zależność:
l
m
X
M
⋅
=
⋅
,
aby była równowaga to odległość X, powieszonego stałego ciężarka M, od punktu podparcia
O, powinna wynosić:
l
M
m
X
⋅
=
.
Można skonstruować wagę w ten sposób, że przeciwciężarek M przesuwa się wzdłuż
ramienia dźwigni, na której umieszczona jest podziałka z ciężarem ważonego materiału. Wagi
przesuwne mają szerokie zastosowanie ze względu na mało kłopotliwy sposób pomiaru. Ich
zasada konstruowania znalazła zastosowanie zarówno do produkcji przedstawionej na rys. 43
wagi kuchennej, jak i wagi lekarskiej, a także do pomiaru masy pojazdów itp.
Rys. 43. Waga przesuwna małej nośności: a) budowa wagi, b) schemat kinematyczny wagi.: 1 – szalka,
3 – prowadnica równoważnika „kg”, 4 – prowadnica równoważnika dokładnego, 5 – przesuwna
masa równoważąca zgrubna (co 0,5 kg), 6 – przesuwna masa równoważąca, 7 – podziałka
dokładna, 8 – łącznik, 9 – dźwignia, 10 – dźwignia pośrednia, 11, 12, 13 – dźwignie z łożyskami
nożowymi, 13 – łożyska nożowe, 14 – równoważnik kalibracji wagi [1, s. 192]
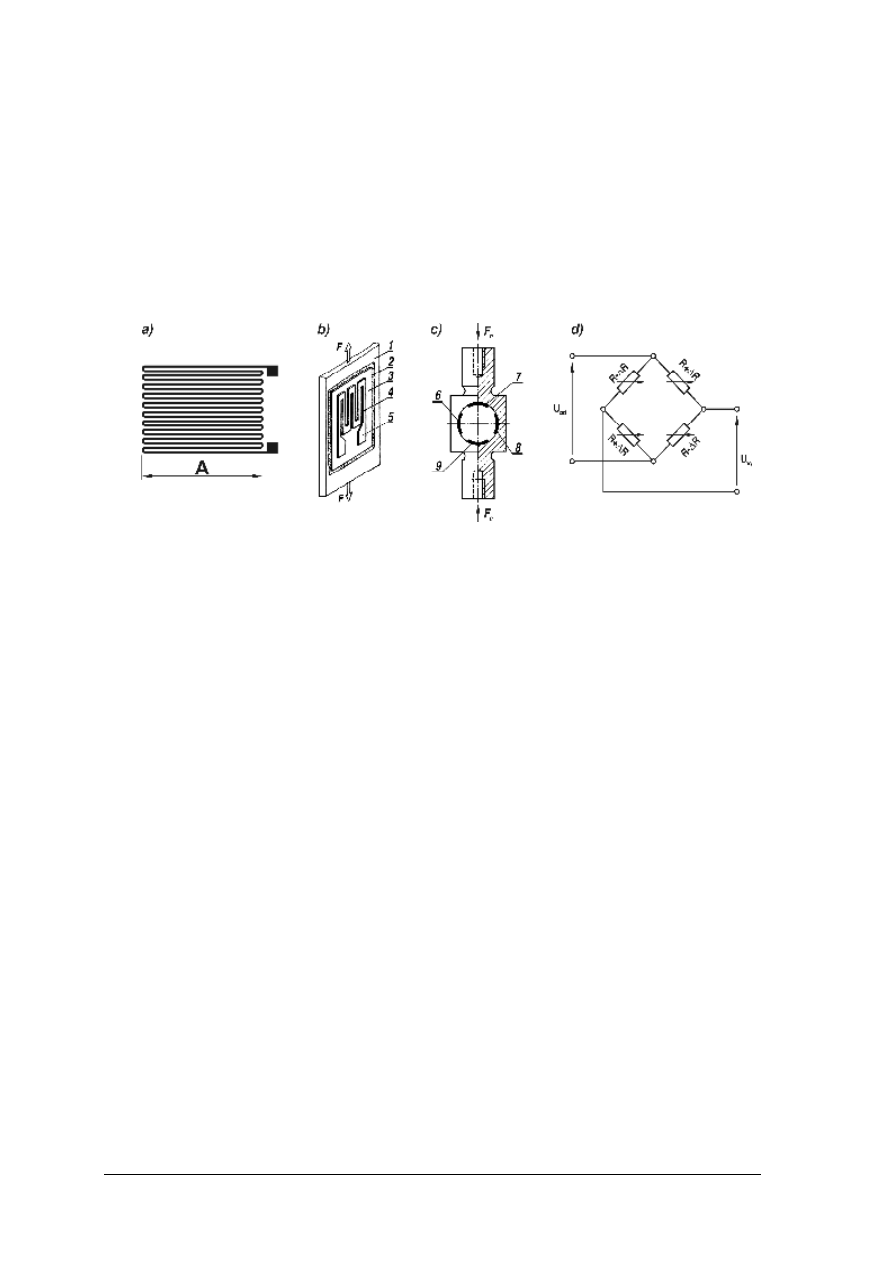
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Wagi są różnorodne, poza przedstawionymi, jedną z nich może być np. waga uchylna, która
bardzo często była używana w handlu. Jednak szybki rozwój elektroniki, sensoryki, a także
cyfrowej techniki mikroprocesorowej, spowodował bardzo szybki rozwój innych sposobów
pomiaru ciężaru. Jeżeli na przedmiot np. metalowy położyć jakikolwiek materiał to działa on
siłą nacisku na to ciało, na którym spoczywa, powodując jego minimalne odkształcenia.
Odkształcenia te są tak małe, że nie są zauważalne dla ludzkiego oka. Tensometryczny
czujnik odkształceń (naklejony na przedmiot w odpowiednim miejscu) pozwala zmierzyć
nieznaczne zmiany jego kształtu spowodowane siłą nacisku ciała spoczywającego na
badanym przedmiocie. Czujnik taki przedstawiony jest na rys. 44a. Jest on cienką metalową
ścieżką naniesioną na podłożu z folii.
Rys. 44. Tensometryczny czujnik siły nacisku: a) ścieżka rezystora czujnika nacisku i wydłużenia
(A≈1÷3mm), b) sposób montażu tensometru [13]: 1 – podłoże odkształcane (np. metal),
2 – klej wiążący, 3 – podkładka nośna (folia sprężysta), 4 – ścieżki rezystora, 5 – pola
podłączenia mostków łączących, c) monolityczny czujnik siły nacisku: 6, 8 – sensory
ściskane, 7, 9 – sensory rozciągane, d) układ mostkowy połączenia sensorów czujnika
(R+
∆
R – rozciągane; R–
∆
R – ściskane) [opracowanie własne]
Przy pomiarze takim sposobem również musi wystąpić równowaga sił (jak w poprzednio
omawianych typach wag), ale w tym przypadku nacisk powoduje nieznaczną zmianę kształtu
korpusu czujnika, który odkształca się tym bardziej im większą masę się na niego położy.
Tensometr zwiększa swoją rezystancję wraz z rozciąganiem go, spowodowanym działającą
na niego siłą. Budowa przedstawiona jest na rys. 44a i 44b. Na pierwszym jest część
elektryczna pojedynczego sensora. Jej rozmiary są bardzo małe, a jednocześnie jest wykonana
w postaci długiej przewodzącej ścieżki (ułożonej w kształcie węża, aby czujnik nie był zbyt
długi), która podczas działania siły rozciągającej wydłuża się i tym samym zwiększa swoją
rezystancję, a przy ściskaniu rezystancja zmniejsza się. Rys. 44b przedstawia sposób montażu
tensometru do badanego podłoża (1): podkładka nośna z folii (3) jest przyklejona klejem (2)
do podłoża. Rys. 44c przedstawia przykładową budowę czujnika siły ściskającej.
Do metalowego korpusu posiadającego specjalne koliste przewężenie przyklejone są cztery
tensometry (6 i 8 – ściskane, które zmniejszają rezystancję oraz 7 i 9 – rozciągane –
zwiększające rezystancję). Tensometry najczęściej łączone są w układ mostka Thomsona
(rys. 44d), dzięki czemu uzyskuje się liniową charakterystykę wyjściową układu
pomiarowego U
wy
=f(F
n
) (U
wy
– napięcie wyjściowe, F
n
– siła działająca na tensometr).
Tensometryczne czujniki nacisku mogą być różnorodnie wykonane. Jedne są tak czułe,
że w oparciu o nie, tworzyć można bardzo dokładne wagi, o czułościach tak dużych,
że stosowane są w laboratoryjnych wagach elektronicznych, których górna granica zakresu
ważonych mas wynosi 5, 15 lub 30g. Inne mogą mieć tak duże zakresy pomiarowe (przy
mniejszej czułości), że wykorzystując je, można konstruować wagi o dużych wartościach
ważonych mas. W tym przypadku sięgać mogą one zakresów pozwalających ważyć np. masy
towarów przewożonych samochodami ciężarowymi (lub większe masy).
W zastosowaniach handlowych używane są teraz tylko wagi elektroniczne
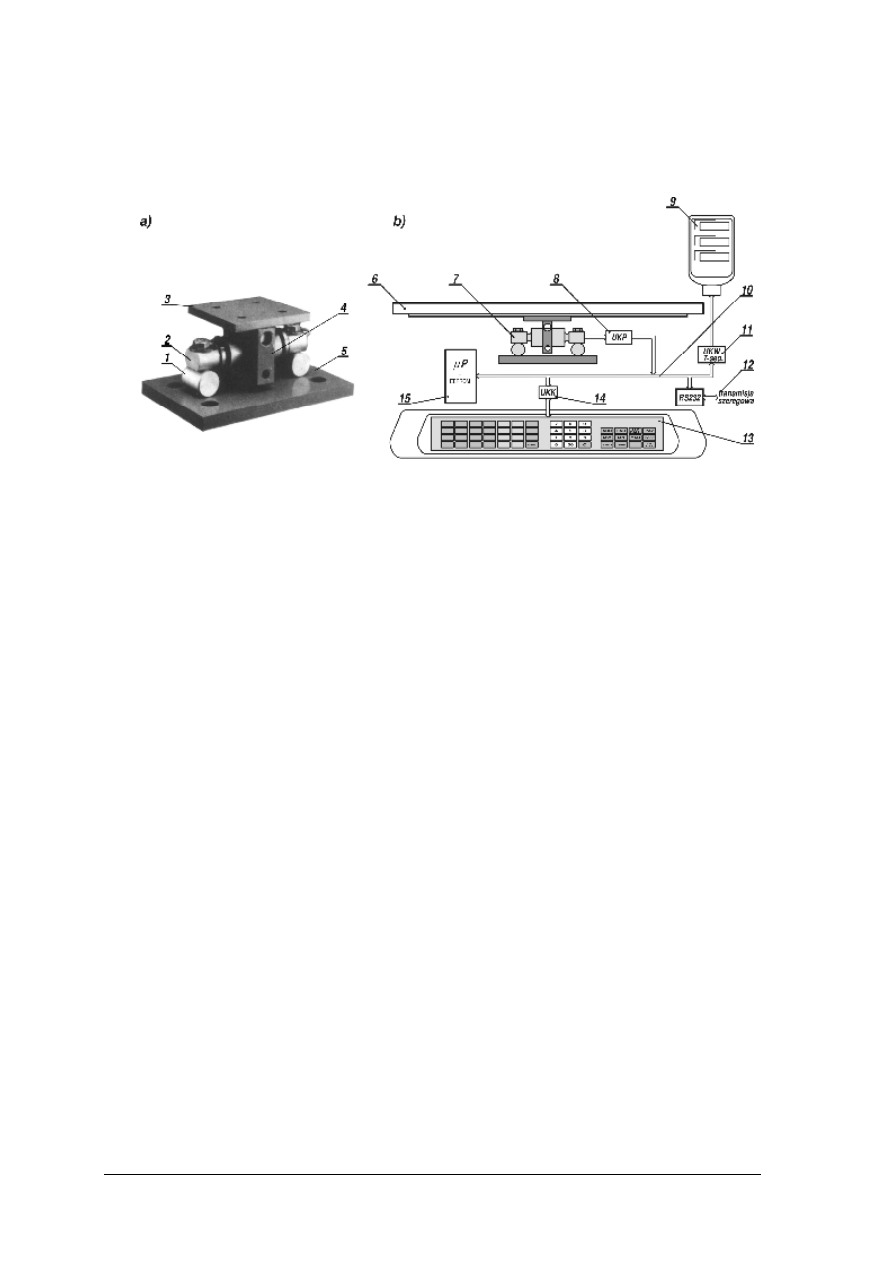
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
ze sterowaniem mikroprocesorowym. Pozwalają one na współpracę wagi z elektroniczną kasą
fiskalną. Na rys. 45a przedstawiono przykładowy organ pomiarowy elektronicznej wagi
handlowej, który w różnych wersjach stosowany jest we wszystkich elektronicznych wagach
sklepowych. Na rys. 45b jest schemat blokowy takiej wagi.
Rys. 45. Waga elektroniczna z monolitycznym czujnikiem siły: a) organ pomiarowy, b) schemat
blokowy: 1 – zawieszenie czujnika, 2 – monolityczny przetwornik siły, 3 – podstawa blatu,
4 – wspornik podstawy blatu, 5 – podstawa organu pomiarowego, 6 – blat wagi, 7 – czujnik
tensometryczny, 8 – układ kontrolera przetwornika pomiarowego, 9 – wyświetlacz 3–polowy,
10 – wewnętrzna magistrala danych, 11 – układ kontrolera wyświetlacza, 12 – transmisja
szeregowa z portu RS232, 13 – klawiatura membranowa, 14 – układ kontrolera klawiatury,
15 – mikroprocesor z pamięcią i programem [opracowanie własne]
Przedstawiona waga (rys. 46a) wykonywana jest w trzech wersjach, które różnią się
zakresem maksymalnego ciężaru ważonego. W podstawowym wykonaniu waga ma zakres od
0 do 6kg i może ważyć w dwóch podzakresach 0÷3kg z dokładnością 1g oraz 0–6kg
(dokładność 2g). Waga ta zasilana jest z ogólnodostępnej sieci przemysłowej. Jej
podstawowymi elementami są: obudowa, poziomnica (1), szalka jako powierzchnia robocza
(2), wysięgnik wyświetlacza (3), 3–polowy wyświetlacz 7–segmentowy (4), uchwyt
wysięgnika (5), membranowa klawiatura sterująca (6) i nóżki do wypoziomowania wagi (7).
Waga jest wyposażona w port transmisji szeregowej RS232, do podłączenia z komputerem
nadrzędnym, drukarką lub kasą fiskalną. Waga powinna pracować na stabilnym płaskim
i poziomym podłożu. Jeżeli blat, na którym pracuje nie jest idealnie poziomy, to
wypoziomowanie wagi można w pewnym nieznacznym zakresie skorygować za pomocą
wkręcanych nóżek i poziomnicy (1).
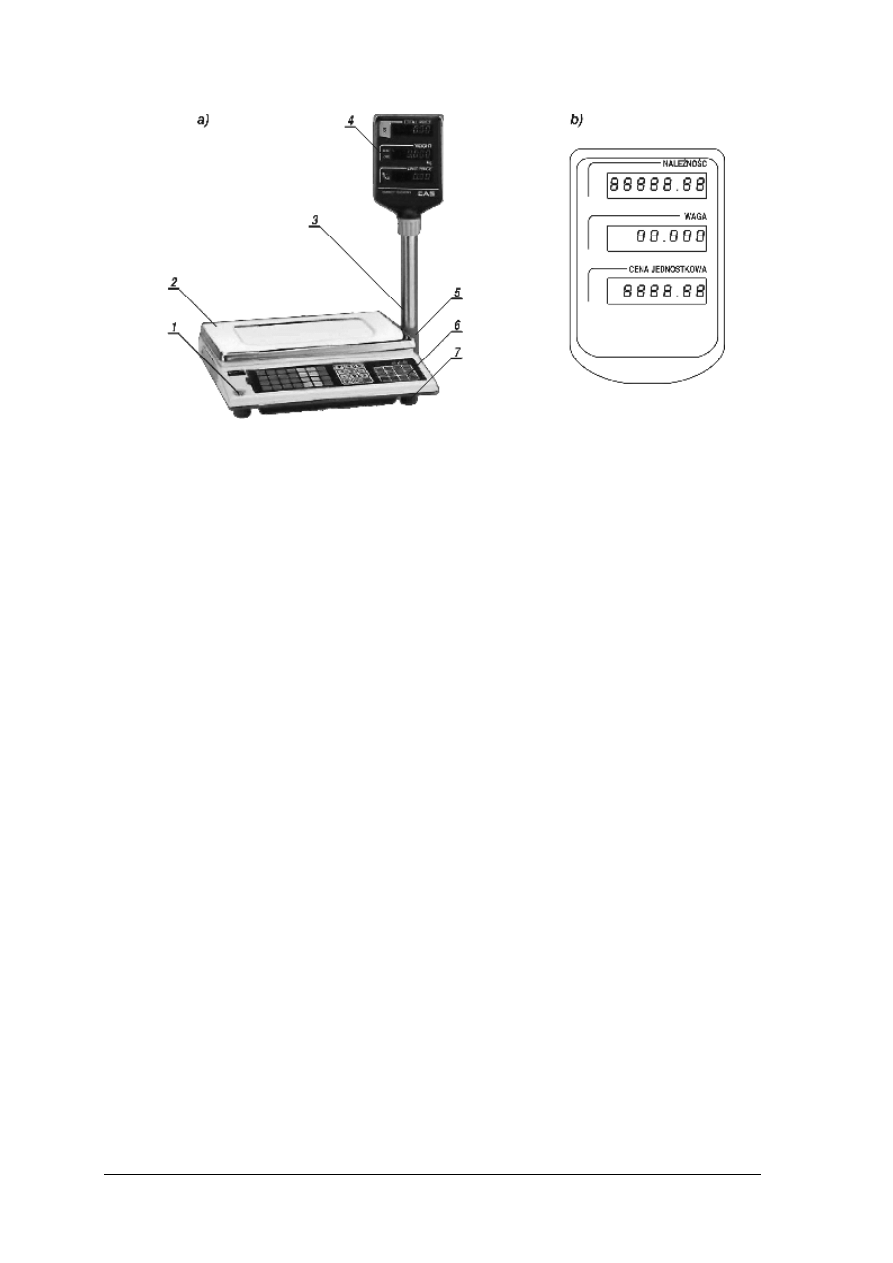
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Rys. 46.
Waga elektroniczna z tensometrycznym czujnikiem rezystancyjnym:
a) wygląd wagi 1 – poziomnica, 2 – szalka wagi, 3 – wysięgnik,
4 – wyświetlacz, 5 – uchwyt wysięgnika 6 – klawiatura, 7 – nóżki
regulacyjne, b) wyświetlacz wagi [opracowanie własne na podstawie
www.cas–polska.com.pl]
Przed rozpoczęciem ważenia należy sprawdzić, czy waga jest wypoziomowana i jeśli
trzeba – skorygować je. Włączyć wtyczkę kabla zasilającego do gniazdka (230V,50Hz) oraz
włączyć zasilanie przyciskiem „ON” na klawiaturze. Następnie należy na klawiaturze
wprowadzić cenę jednostkową towaru, a wartość ta pojawi się na dolnym polu wyświetlacza
(rys. 46b). Położyć towar na szalce wagi, a po krótkiej chwili na środkowym polu pojawi się
masa towaru, a na górnym polu wyliczona przez mikroprocesor należność do zapłacenia.
Po zdjęciu towaru z wagi wszystkie pola wyświetlacza zostają automatycznie wyzerowane.
Jeżeli nie zostanie wprowadzona cena jednostkowa, to po „zważeniu” pojawi się tylko waga
na środkowym polu wyświetlacza. Waga ta pozwala: zważyć towar i wyliczyć należność za
niego na podstawie wprowadzonej ceny, ważyć z tzw. „tarowaniem” (ważenie „wagi netto”,
czyli wagi towaru z pominięciem wagi opakowania), sumować koszty zakupu jednego
klienta, przeprowadzić transmisję danych do drukarki (poprzez złącze RS232) w celu
wydruku paragonu, ewidencjonować dzienną sprzedaż, wykonać transmisję wszystkich
wykonanych operacji do komputera nadrzędnego sprzężonego z kasą fiskalną.
Podczas dokonywania transakcji sprzedaży – zakupu sprzedawca jest obowiązany
posiadać dowody przeprowadzonych transakcji. Nasz ustawodawca przewidział do tego
(podobnie jak i w innych krajach) tzw. kasy fiskalne. Jest to urządzenie rejestrujące dochody
ze sprzedaży detalicznej. Każda kasa fiskalna musi rejestrować wszystkie transakcje dzienne:
na drukarce albo w module fiskalnym. Jedną z wersji jest rejestrowanie z wykorzystaniem
drukarki, która najczęściej jest zintegrowana z samą kasą (rys. 47).

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Rys. 47. Kasa fiskalna zintegrowana z drukarką [Kasa rejestrująca Datecs Maluch,
Instrukcja użytkownika, Wersja 1.0, Datecs Polska, Warszawa 2006, s. 6, 7]
W handlu używanych jest wiele typów kas fiskalnych. Wybrana kasa jest jedną
z prostszych, ma następujące cechy i pozwala m.in. na:
a) pracę z zasilaniem sieciowym lub bateryjnym (praca mobilna),
b) wydruk paragonu na drukarce termicznej (12 linii/s),
c) pracę w temp: –10°C – +40°C,
d) zgromadzić bazą pozycji w kasie: 999,
e) wyświetlać w 2 wierszach po 16 znaków (LCD),
f) poza tym wszystkie standardowe funkcje kas fiskalnych: stawki VAT; różne formy
płatności; rabaty i marże i inne.
Podstawowa obsługa tej kasy polega na:
a) włączaniu kasy:
−
wcisnąć klawisz ON i przytrzymać go przez minimum 3 s (pojawi się pozioma
kreska na wyświetlaczu),
−
wybrać jeden z dostępnych trybów pracy:
R – tryb rejestracji sprzedaży (każdy kasjer),
X – wykonywanie raportów bez ich kasowania (tylko ADIMIN),
Z
– raporty typu zerującego z kasowaniem danych (tylko ADIMIN),
P
– tryb programowania kasy (tylko ADIMIN),
b) wyłączanie kasy:
−
wylogować się z obsługi kasy (pojawi się pozioma kreska na wyświetlaczu),
−
poczekać 30 s (lub wcisnąć klawisz 0) – pojawi się komunikat [WYŁĄCZAM
KASĘ] i kasa się wyłączy.
Należy pamiętać, że tak jest w tym typie kasy – w innych kasach mogą być zupełnie inne
sposoby podstawowej obsługi. Do podstawowych czynności obsługowych należy wymiana
papieru w drukarce termicznej kasy. Sposób wymiany ilustruje rys. 48.
Kasy fiskalne wytwarzane są przez wielu producentów. Producent ma w swojej ofercie kilka
takich urządzeń i w kolejnych dodaje nowe funkcje, np. wyposażając klawiaturę w dodatkowe
klawisze, dlatego czynności obsługowe różnych typów kas mogą się różnić, m.in. klawiszami,
które należy nacisnąć. Zmieniając typ obsługiwanej kasy (a nawet zmieniając kasę na inny model
tego samego wytwórcy), dokładnie przeanalizować instrukcję dla użytkownika i przedstawione
w niej sposoby wykonania czynności.
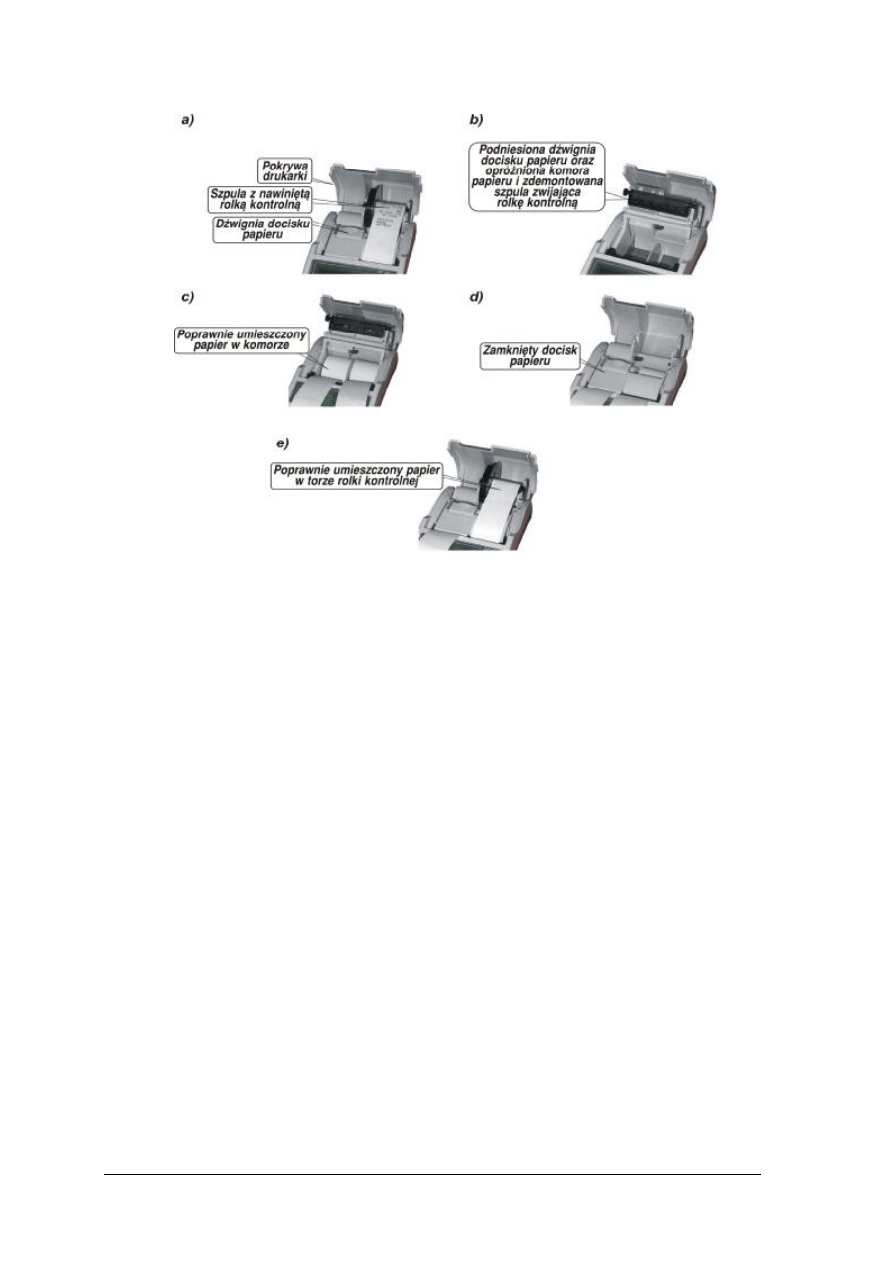
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Rys. 48. Wymiana papieru w drukarce kasy fiskalnej [Kasa rejestrująca Datecs Maluch,
Instrukcja użytkownika, Wersja 1.0, Datecs Polska, Warszawa 2006, s. 8, 9, 10]
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak należy ważyć na wadze równoramiennej?
2. Jak należy ważyć na wadze laboratoryjnej?
3. Jak należy ważyć na wadze przesuwnej?
4. Na jakie bodźce reaguje czujnik tensometryczny?
5. Z jakich elementów blokowych jest zbudowana waga elektroniczna?
6. Jak należy ważyć wagą elektroniczną?
7. Jakie są wymagania dla współczesnej kasy fiskalnej?
8. Jakie są możliwości pracy kasy fiskalnej?
4.5.3. Ćwiczenia
Ćwiczenie 1
Wykonaj pomiar przedmiotów masy wagą laboratoryjną.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) położyć na jednej szali wagi wskazany przez nauczyciela przedmiot,
2) na drugą szalę położyć odważniki o łącznej masie zbliżonej do przewidywanego ciężaru,
3) podnieść pokrętłem kolumnę z belką i zawieszonymi na niej szalami i dokonać
sprawdzenia równowagi,
4) jeżeli przeważa mierzona masa, to dołożyć odważników na drugą szalę, a jeżeli
przeważają odważniki, to należy zdjąć odpowiednią ich ilość,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
5) zsumować masy wszystkich odważników–jest to masa ważonego materiału.
Uwaga
Waga laboratoryjna jest bardzo delikatnym przyrządem–szczególnie delikatne są łożyska
nożowe. Dlatego też podczas nakładania na szalę wagi zarówno materiału, jak
i odważników kolumna musi być opuszczona, a belka spoczywać na zderzakach!
Wyposażenie stanowiska pracy:
–
waga laboratoryjna,
–
komplet odważników,
–
materiału do ważenia.
Ćwiczenie 2
Wykonaj pomiar masy towaru sklepową wagą elektroniczną.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić wypoziomowanie wagi elektronicznej i ewentualnie skorygować je przez
regulację wysokości wkręcanych nóżek,
2) włączyć zasilanie wagi (do sieci i przyciskiem ON),
3) wprowadzić za pomocą klawiatury cenę jednostkową towaru,
4) położyć na szali towar i odczytać z wyświetlacza wagę towaru oraz należność,
5) pomiar wykonać również dla materiału sypkiego pakowanego (ważenie z tzw.
„tarowaniem”) – pomiar wykonać wg opisu przedstawionego w instrukcji użytkownika.
Wyposażenie stanowiska pracy:
–
elektroniczna waga sklepowa,
–
instrukcja obsługi wagi,
–
różne materiały do pomiaru masy oraz opakowania dla materiałów sypkich.
Ćwiczenie 3
Wymień rolkę kontrolną w kasie fiskalnej oraz załóż rolkę z papierem do druku
paragonów w kasie fiskalnej.
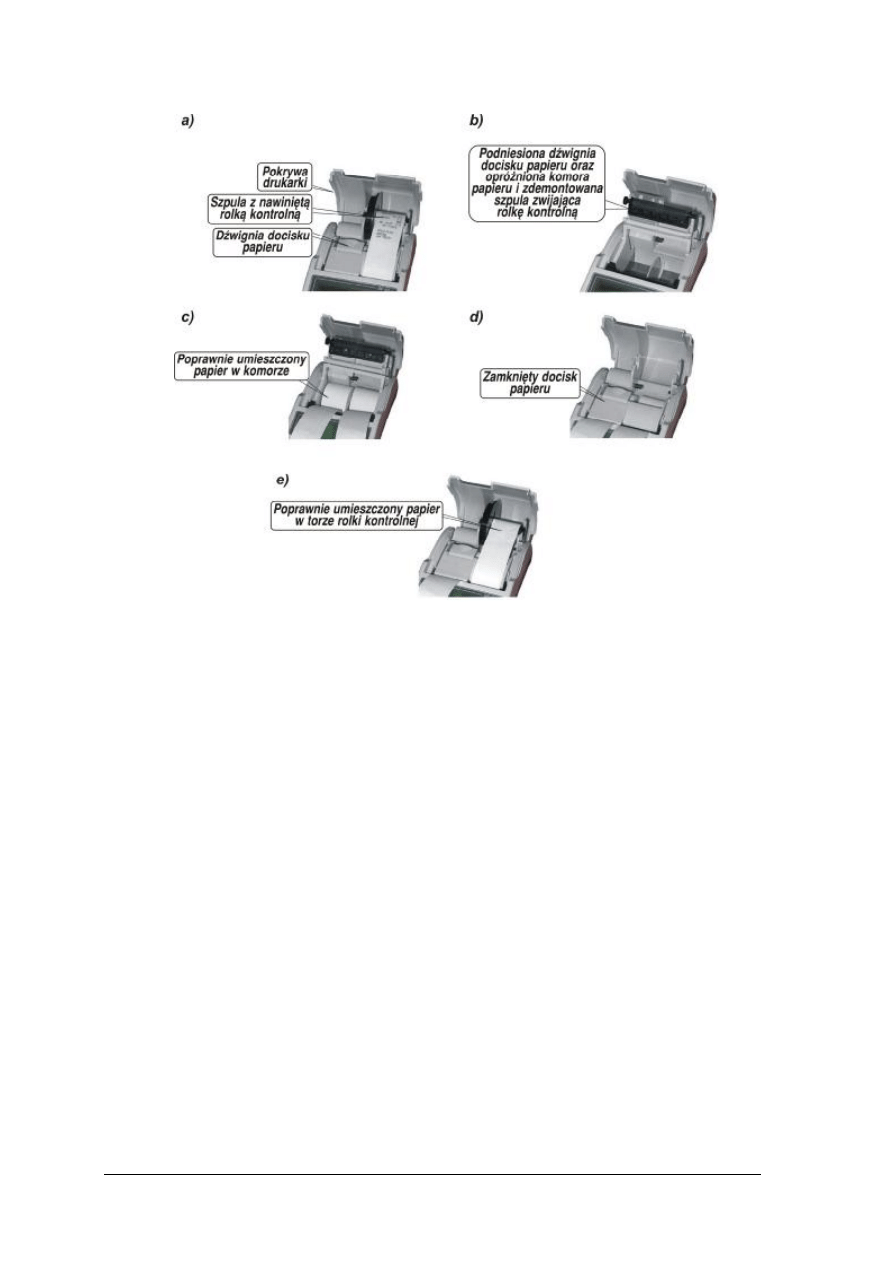
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Rysunek do ćwiczenia 3. Wymiana papieru w drukarce kasy fiskalnej [Kasa rejestrująca Datecs Maluch,
Instrukcja użytkownika, Wersja 1.0, Datecs Polska, Warszawa 2006, str. 8, 9, 10]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) otworzyć pokrywę drukarki kasy fiskalnej i dźwignię docisku papieru (rysunek do
ćwiczenia 3a),
2) wyciągnąć gilzy, na które nawinięty był papier oraz zdjąć szpulę z taśmą kontrolną
(przechowywaną przez 5–6 lat),
3) umieścić obie rolki w odpowiednich komorach drukarki tak, aby papier odwijał się od
spodu (rolki papieru termicznego mają szerokość 28 mm i długości 20 m),
4) rozwinąć obie rolki na długość ok. 15 cm oraz opuścić dźwignię docisku papieru,
5) odwinięty papier z prawej rolki przełożyć przez szczelinę w szpuli nawijającej i włożyć
ją na widełki,
6) zamknąć pokrywę drukarki, a wystający papier oderwać tak, jak odrywa się paragon.
Wyposażenie stanowiska pracy:
–
kasa rejestrująca Datecs Maluch (lub inna),
–
instrukcja obsługi kasy fiskalnej,
–
papier termiczny w rolkach.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić działanie wagi dźwigniowej?
2)
przedstawić
sposób
pomiaru
masy
ciał
wagą
laboratoryjną?
3)
scharakteryzować budowę wagi przesuwnej i pomiar
masy ciała z jej wykorzystaniem?
4)
przedstawić określenie czujnika tensometrycznego siły?
5)
scharakteryzować budowę i działanie monolitycznego
czujnika siły nacisku?
6)
przedstawić budowę blokową elektronicznej wagi
sklepowej i podać przeznaczenie poszczególnych jej
bloków?
7)
scharakteryzować
sposoby
pomiaru
masy
ciała
elektroniczną wagą sklepową?
8)
przygotować do pracy kasę fiskalną?
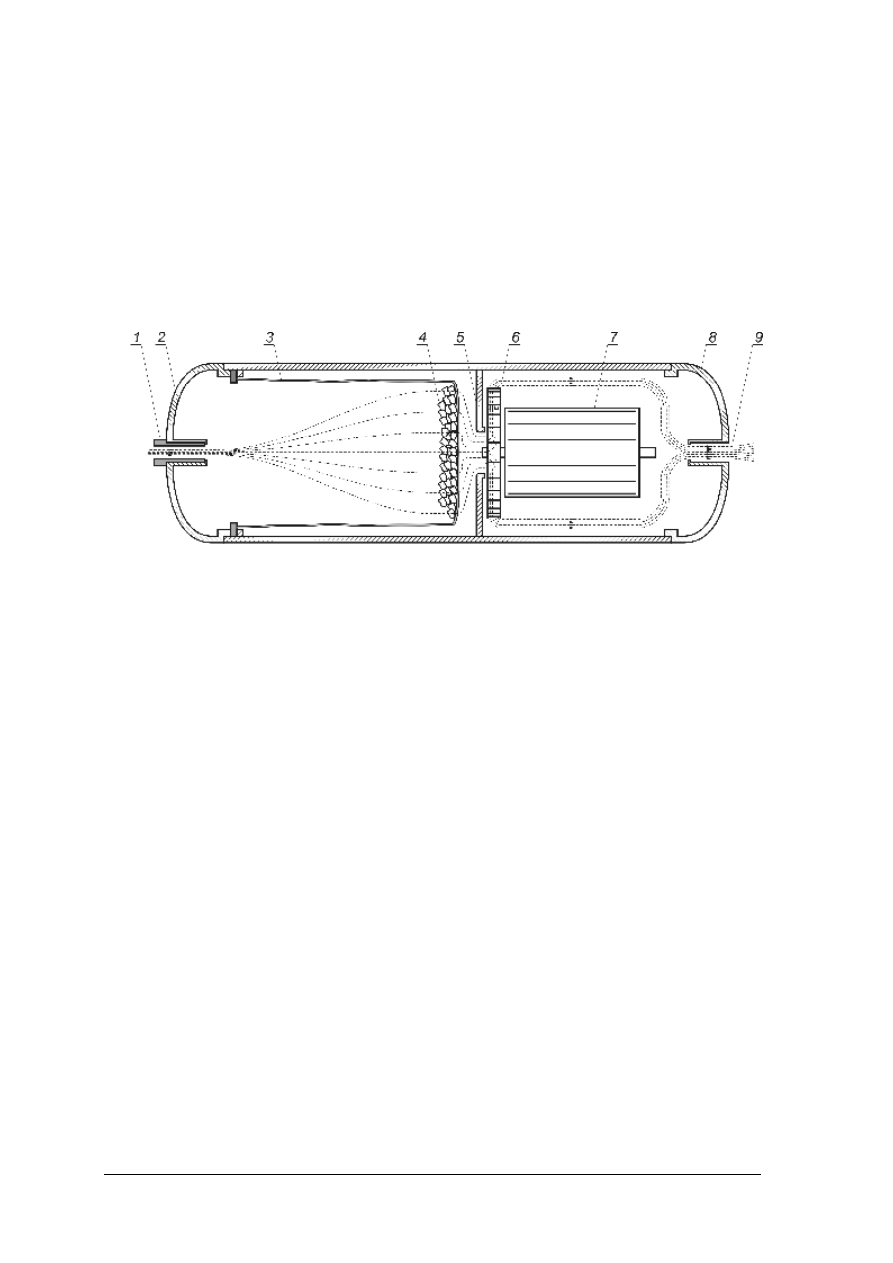
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
4.6. Sprzęt gospodarstwa domowego
4.6.1. Materiał nauczania
Prace we współczesnym gospodarstwie domowym są w dość dużym zakresie
zmechanizowane. Dotyczy to wszystkich prac domowych, obejmujących przygotowanie
posiłków, przechowywanie produktów koniecznych do gotowania, gotowanie, sprzątanie
(zarówno po pracach kuchennych, jak i sprzątanie pomieszczeń z kurzu, brudu itp.), pranie,
szycie itp.
Działanie odkurzacza wyjaśnia rys. 49.
Rys. 49. Odkurzacz – schemat zasady działania podstawowej wersji. 1 – końcówka węża elastycznego
– wlot powietrza z drobinami kurzu i brudu, 2 pokrywa „przednia”, 3 – worek na kurz
(z materiału), 4 – cząsteczki kurzu i brudu, 5 – przegroda, 6– wentylator odśrodkowy,
7 – silnik elektryczny, 8 – pokrywa tylna, 9 – wylot „czystego” powietrza [opracowanie
własne]
Szybkoobrotowy silnik elektryczny o stosunkowo dużej mocy (300–1000 W – nawet do
1800W) napędza wentylator odśrodkowy, który zasysa powietrze z lewej części obudowy
przez otwór w przegrodzie (5). Powietrze to może się tam (do komory) dostać tylko poprzez
otwór w przedniej pokrywie (1). Ponieważ do tego otworu podłączony jest wąż elastyczny
zakończony ssawką zbierającą przez silny strumień ssanego powietrza kurz, dostaje się on do
wnętrza obudowy. Powietrze dalej przepływa przez wentylator (6) i wyrzucane jest na
zewnątrz przez otwór w tylnej pokrywie (9). Po drodze powietrze przepływa przez malutkie
otworki w tkaninie worka na brud (3). Ponieważ drobiny kurzu są o wiele większe niż
szczeliny w materiale, to pozostają one w worku osadzając się na jego ściankach (4). Obecnie
produkowane odkurzacze wyposażone w worki (papierowe lub z tkaniny) działają w oparciu
o przedstawioną zasadę.
Odkurzacz produkcji Zelmera „Wodnik” przedstawiony jest na rys. 50a, jest
odkurzaczem „piorącym”, to znaczy, że oprócz typowych funkcji czyszczących przez
zbieranie kurzu i brudu w specjalnym pojemniku („worku na śmieci”), ma możliwość
„prania” dywanów i wykładzin dywanowych. Odkurzacz ten może pracować w następujących
trybach pracy:
a) praca tradycyjna – odkurzacz zbiera kurz w worku papierowym,
b) praca z użyciem filtra wodnego i worka papierowego – śmieci są zbierane w worku
papierowym, a pozostałe drobiny kurzu i roztocza zbierają się w wodzie,
c) praca z użyciem specjalnej przegrody filtracyjnej (przepuszcza powietrze, ale nie
przepuszcza wody) i filtra wodnego – wstępnie zanieczyszczenia zbierają się w zbiorniku
(jednak bez worka papierowego) zatrzymywane przez specjalną wkładkę filtracyjną,
a pozostały drobny kurz zatrzymywany jest przez filtr wodny,
d) praca z użyciem filtra wodnego i zwykłej wkładki filtracyjnej (podobnie jak poprzednio)
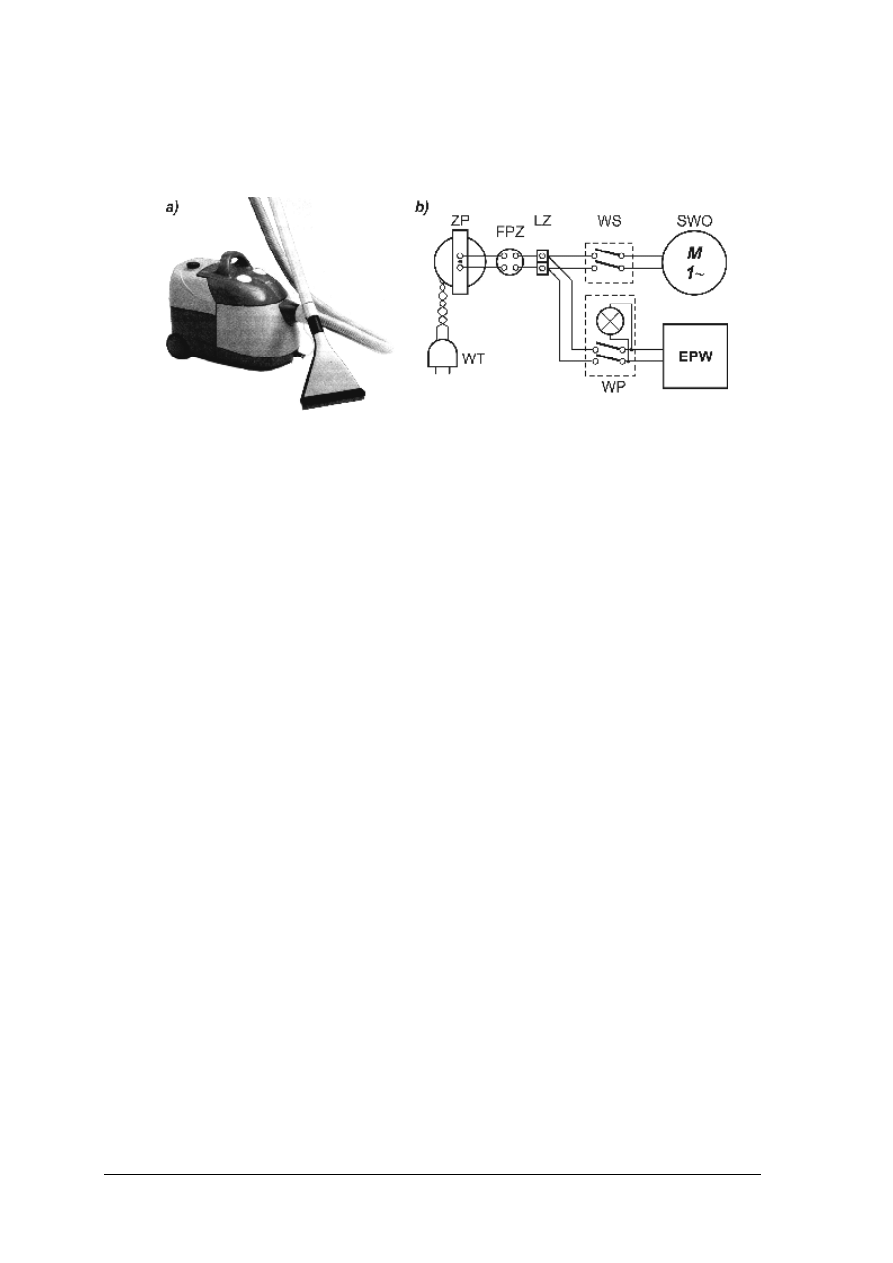
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
– nie ma separacji zbiornika od wody, więc śmieci w zbiorniku są wilgotne (lub mokre),
e) praca tylko z użyciem filtra wodnego – „grube” zanieczyszczenia zatrzymywane są
metodą bezwładnościową z zbiorniku, a drobniejsze zanieczyszczenia zatrzymuje filtr
wodny.
Rys. 50. Odkurzacz Zelmer Wodnik Trio: a) widok ogólny,] b) schemat instalacji elektrycznej: WT – wtyczka
sieciowa, ZP – zwijacz przewodu zasilającego, FPZ – filtr przeciwzakłóceniowy, LZ – listwa
zasilająca, WS – wyłącznik silnika wentylatora odśrodkowego, SWO – silnik wentylatora
odśrodkowego, WP – wyłącznik pompy wodnej z sygnalizacją, EPW – elektromagnes pompy wodnej
[Odkurzacz typ 619 Wodnik Trio – instrukcja obsługi, Zelmer S.A., Rzeszów 1999, s. 1]
Odkurzacz ten ma opcję „prania” dywanów. Pranie polega na wytwarzaniu piany
czyszczącej, ułatwienia jej nanoszenia na czyszczoną powierzchnie, szorowaniu szczotką
(ręcznie) i następnie usuwaniu piany z brudem poprzez odessanie ich. W urządzeniu tym jest
pompa wodna, która tłoczy wodę zmieszaną ze środkiem czyszcząco–pianotwórczym
elastycznymi przewodami ze zbiornika do dyszy. Elastyczna rurka, którą płynie ciecz,
prowadzona jest łącznie z wężem ssącym do ssawki. Przy ssawce ze szczotką znajduje się
dysza. Woda wytryskując z tej dyszy pod ciśnieniem tworzy pianę pokrywającą dywan (lub
wykładzinę), włosy szczotki poruszanej ręcznie (jak przy sprzątaniu) rozpuszczają brud
i usuwają go, a ssawka zbiera brud z pianą do zbiornika wodnego odkurzacza. Pompka
tłocząca napędzana elektromagnesem nie powinna pracować jałowo – bez chłodzenia jej
płynem, może ona łatwo ulec zatarciu, więc włącznik pompy ma sygnalizator świetlny.
Schemat połączeń elektrycznych w takim urządzeniu przedstawiono na rys. 50b.
Pierwsze mechaniczne maszyny do szycia pojawiły się pod koniec XIX wieku.
Najbardziej popularne są maszyny szyjące tzw. ściegiem stębnowym, powstającym
z przeplotu dwóch nici (tzw. stębnówką) lub ściegiem powstającym z zaplatania jednej nici
(overlock – najczęściej jest ich więcej – minimum dwie nitki). W „domowych maszynach”
najczęściej stosowanym rodzajem ściegu jest ścieg stębnowy zaplatany z dwóch nici. Ścieg
ten powstaje dzięki synchronicznemu współdziałaniu mechanizmów: mechanizmu transportu
materiału (rys. 51b i c), z mechanizmem posuwisto–zwrotnym poruszającym igłę z nicią
(rys. 51a) i z mechanizmem chwytacza.
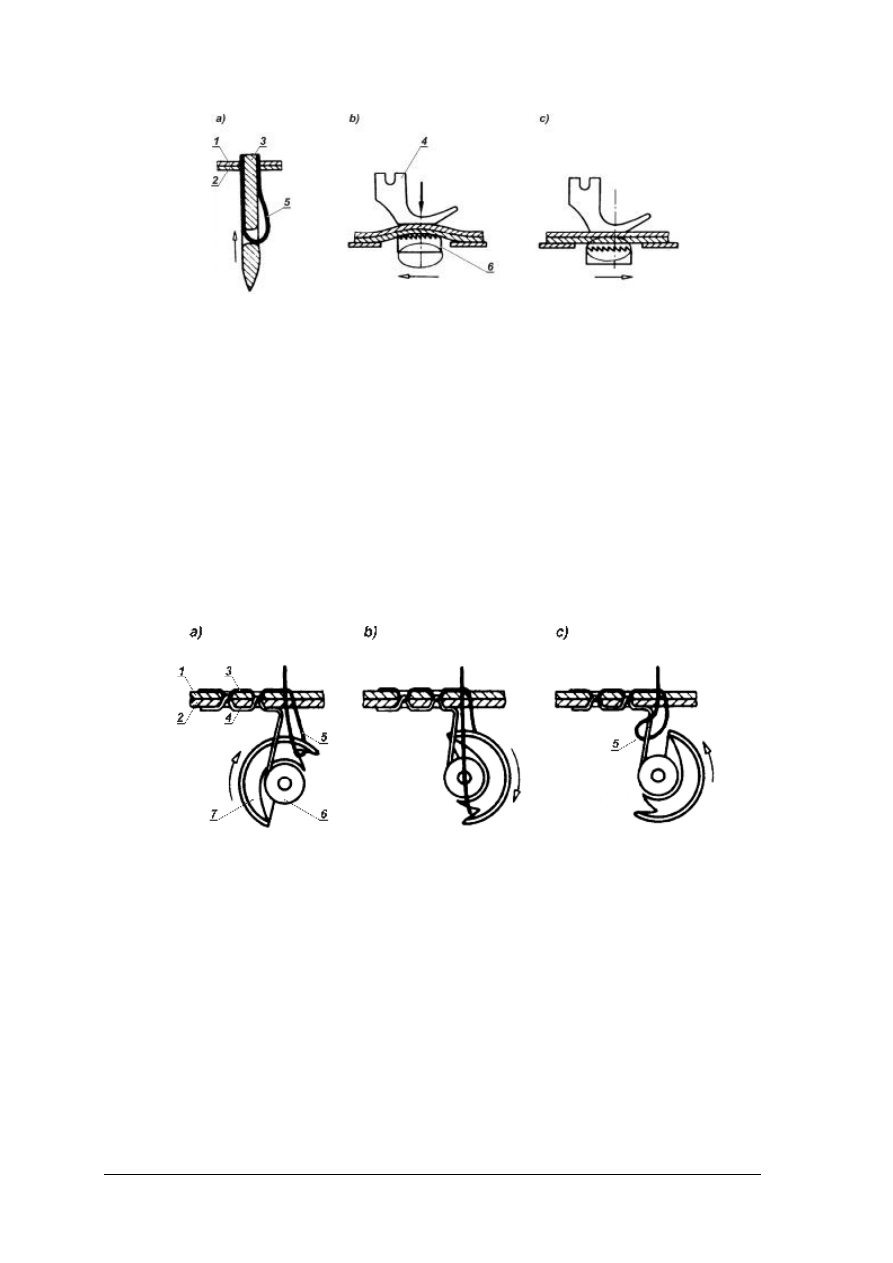
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
Rys. 51. Praca igły i układu transportu tkaniny podczas szycia: 1 – górny materiał, 2 – dolny
materiał, 3 – igła, 4 – stopka dociskowa, 5 – pętelka górnej nitki, 6 – przenośnik
transportowy z ząbkami [15, s. 179]
Podczas pracy maszyny igła z przewleczoną przez jej ucho nicią (1) wykonuje ruchy
posuwisto zwrotne. Poruszając się w dół igła wbija się w materiał, osiąga dolny punkt
zwrotny i następnie zaczyna poruszać się w górę tworząc jednocześnie pętlę z nitki górnej (5).
Transport materiału zapewnia przenośnik transportowy (6) – z ząbkami. Podczas ruchu igły
nad materiałem (rys. 52b) przenośnik (6) jest podniesiony i przesuwając się w lewo jego
ząbki przesuwają zszywane materiały. Gdy igła jest wbita w materiał (rys. 52a) przenośnik
jest opuszczony, nie dotykając materiału, przesuwa się w prawo – cofa się do pozycji, z której
będzie później przesuwał materiał. Sposób zaplatania ściegu przedstawia rys. 52. Aby nie
zaciemniać rysunku nie ma na nim igły i przenośnika przesuwającego materiały. Na rys. 52a
przedstawiona jest sytuacja, gdy igła wysuwa się już ze zszywanych materiałów (1 i 2) – nie
widać jej na tym rysunku, ale to nie znaczy, że jej tam nie ma. W tym momencie, pod
materiałami pozostaje pętla (5) górnej nitki.
Rys. 52. Zaplatanie ściegu stębnowego: 1 – górny materiał, 2 – dolny materiał, 3 – górna
nitka ściegu, 4 – dolna nitka ściegu, 5 – pętelka górnej nitki, 6 – bębenek z dolną
nitką, 7 – chwytacz [15, s. 179]
Pętla ta jest chwytana przez wycięcie obracającego się w prawo chwytaka (7). Podczas
dalszego obrotu w prawo chwytaka (7) (rys. 52b) pętla górnej nitki (5) jest przeciągnięta tak,
że przechodzi poza oś obrotu bębenka (6). Chwytak obraca się aż do pozycji pokazanej na
rys. 52c. Od tej chwili chwytak zaczyna się cofać (obracać w lewo), a niewidoczny tutaj
podciągacz górnej nitki wyciąga ją szybko na górę poza mechanizm zaplatający. Ponieważ
pętelka przeszła już poza połowę obrotu chwytaka (7), to wyciąganie jej spowoduje
wyciągnięcie nitki odwijanej z bębenka (z dolną nitką). Pętelka górnej nitki musi wyciągnąć
dolną nitkę do połowy grubości łączonych materiałów. Poprawność tego przeciągania jest
uzależniona od odpowiedniego naciągu dolnej i górnej nici, które powinny być odpowiednio
dobrane do rodzaju zszywanego materiału. Po podciągnięciu do góry pętelki zaciśniętej
na dolnej nitce jeden ścieg jest zszyty i materiał może przesunąć się w lewo. Długość
przesunięcia materiału jest taka jak odstęp dwóch sąsiednich splotów nici (tj. długość ściegu).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
Dla prawidłowego działania maszyny do szycia i poprawnego szycia, konieczne jest, aby
wszystkie jej mechanizmy ze sobą współdziałały. W szczególności ważne jest współdziałanie
mechanizmów: mocowania i napędu igły oraz transportu materiału z mechanizmem
chwytacza. Współczesne maszyny do szycia, nie różnią się zasadniczo od swoich
pierwowzorów (pod względem zasady działania). Wyposażenie współczesnej maszyny
stanowią:
a) głowica, która wraz ze stopą (lub płytą podstawy – w zależności od wersji) jest
konstrukcją nośną wszystkich pozostałych mechanizmów,
b) posuwisto–zwrotny mechanizm mocowania i pracy igły z podciągaczem nici,
c) mechanizm zaplatający ścieg,
d) mechanizm podawania dolnej nici z regulacją jej naciągu,
e) mechanizm docisku stopki z regulacją siły docisku,
f) układ trzymania, prowadzenia i naciągu górnej nici,
g) układ elektrycznego napędu urządzenia i oświetlenia miejsca roboczego.
Wszystkie mechanizmy potrzebne do tworzenia ściegu umieszczone są w głowicy,
a częściowo i pod płytą roboczą. Początkowo maszyny miały konstrukcję, pozwalającą tylko
na szycie ściegiem prostym. W miarę ich udoskonalania i zwiększania możliwości zaczęto je
rozbudowywać. Przykład maszyny o rozbudowanych możliwościach, ze sterowaniem w pełni
mechanicznym, tj. za pomocą krzywek itp. przedstawia rys. 53a. Maszyna ta, pochodząca
z lat 80–ch zeszłego stulecia, umożliwiała: szycie ściegiem prostym, szycie ściegiem prostym
podwójnym (podwójną igłą); wszywanie zamków błyskawicznych; szycie ściegiem
zygzakowym; szycie ściegami elastycznymi (zygzakowym potrójnym, obrębiającym
ukośnym, gałązkowym, prostym rozciągliwym); półautomatyczne „obrzucanie” dziurek do
guzików; ułatwiała prace hafciarskie i cerowania.
Rys. 53. Maszyny do szycia: a) Łucznik 884 (na lic. Singer z 1986 r.) b) Singer Quantum
9910 (prod. 2006 r.) [Instrukcja obsługi maszyny do szycia Łucznik 884, Łucznik]
Maszyna z rys. 53b jest współczesnym produktem Singera, konstrukcją z zastosowaniem
elektronicznej techniki mikroprocesorowej. Do sterowania i kontroli pracy wszystkich
podzespołów zastosowano tutaj mikroprocesor, jako tzw. „sztuczną inteligencję”, nadzorującą
pracę mechanizmów wykonawczych i sterujących. Elementami sterującymi są tutaj przyciski
mikrowyłączników przekazujących w ten sposób polecenia operatora. Podzespołami
wykonawczymi sterowania (tymi, które odpowiednio przesuwają igłę, chwytacz
lub przenośnik transportowy) są silniki krokowe. Wizualną kontrolę nad ustawionymi
parametrami ściegu (wzór ściegu, jego długość, szerokość itp.), która w mechanicznych
maszynach była widoczna na podstawie pozycji dźwigni sterujących, tu operator ma
zapewnioną przez wyświetlanie na wyświetlaczu LCD ustawionych przez siebie wartości.
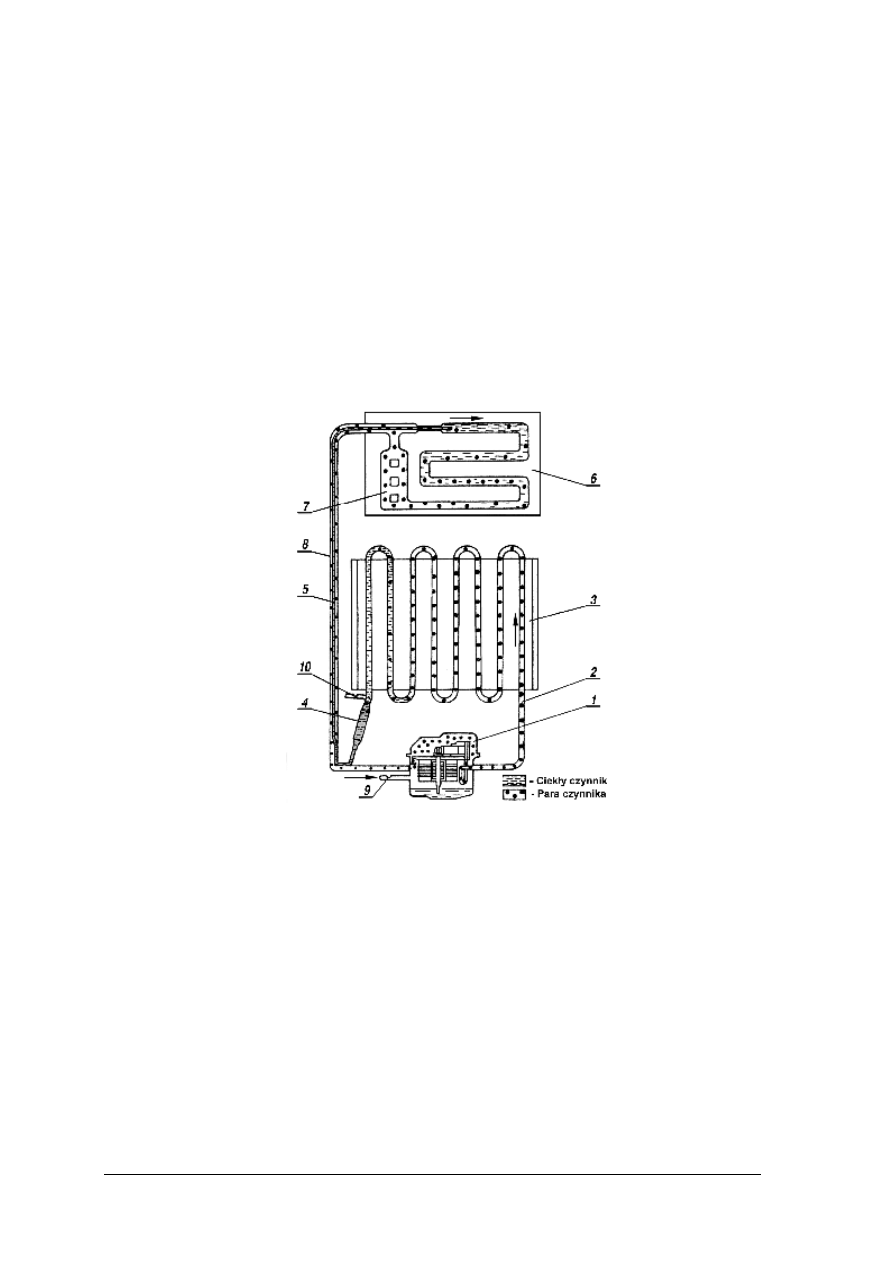
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
Lodówka jest to najczęściej szafka, izolowana termicznie od otoczenia. Chłodzenie jest
możliwe przez umieszczenie wewnątrz lodówki substancji, która ma obniżoną temperaturę.
Substancja ta musi mieć dużą masę oraz odpowiednie ciepło właściwe – w praktyce jest nią
lód, czyli zamarznięta woda; często stosowany jest też tzw. suchy lód (zamarznięty dwutlenek
węgla). Lodówka, to taki termos, w którym znajduje się lód. Takie rozwiązanie ma
podstawową wadę – po jakimś czasie lód ogrzeje się i roztopi.
Chłodziarka jest urządzeniem przeznaczonym do obniżania temperatury w zamkniętym
i izolowanym termicznie środowisku, kosztem zużywania dostarczanej jej energii.
Chłodziarki można podzielić na 3 grupy: absorpcyjne, sprężarkowe i inne. W sprzęcie
domowym jest stosowane chłodzenie sprężarkowe. Tak budowane są chłodziarki i zamrażarki
domowe.
Chłodziarka sprężarkowa jest urządzeniem, w którym obieg czynnika chłodzącego jest
wymuszony przez sprężarkę. Działanie jej zostanie przedstawione w oparciu o schemat
chłodziarki typu TS248A (rys. 54).
Rys. 54. Schemat działania chłodzenia sprężarkowego w chłodziarce TS248A: 1 – sprężarka
hermetyczna, 2 – przewód tłoczny, 3 – skraplacz, 4 – filtr–odwadniacz, 5 – rurka kapilarna,
6 – parownik, 7 – osuszacz, 8 – przewód ssawny, 9 – rurka napełniająca, 10 – rurka do
dodatkowego odciągania próżni [Instrukcja napraw chłodziarek sprężarkowych Nr INC/1/83]
Sprężarka (1) zasysa czynnik chłodzący poprzez przewód ssawny (8) z osuszacza (7)
i tłoczy go poprzez przewód tłoczny (2) do skraplacza (3). W skraplaczu wzrasta ciśnienie
gazu i jego temperatura. W domowych chłodziarkach skraplacz znajduje się zawsze z tyłu
i jest wyposażony w dużą ilość żeber chłodzących. Ze skraplacza czynnik w stanie ciekłym
jest tłoczony przez filtr–odwadniacz (4), następnie kapilarą (5), spełniającą rolę zaworu
dławiącego, do parownika (6). Kapilara (5) jest umieszczona wewnątrz przewodu ssawnego
(8), więc chłodny rozprężony gaz przepływając nią chłodzi równocześnie przetłaczany
sprężony do stanu ciekłego czynnik roboczy. W parowniku następuje gwałtowne rozprężenie,
parowanie i odbieranie ciepła od całego wnętrza komory chłodziarki, w której parownik się
znajduje. Z parownika gaz przepływa do osuszacza (7) i obieg się zamyka. Parownik (6)
umieszczony jest w komorze chłodniczej, która jest izolowana termicznie. Chłodzenie polega
na obniżaniu temperatury parownika (podczas rozprężania gazu w jego rurkach i jego
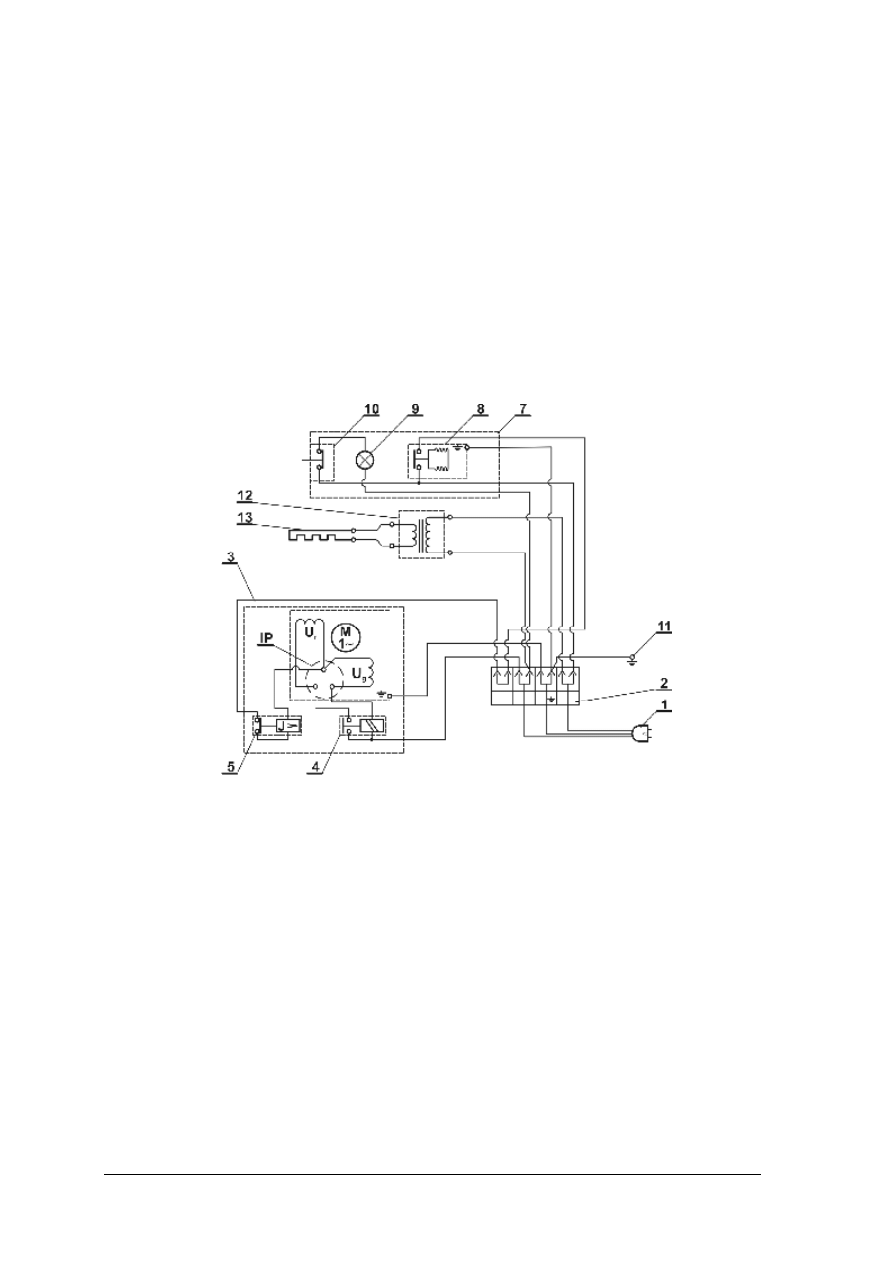
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
gwałtownego parowania). Parownik natomiast odbiera ciepło od powietrza zamkniętego
w komorze chłodniczej i za jego pośrednictwem od środków spożywczych tam
umieszczonych. Poprawne działanie całej chłodziarki jest uwarunkowane prawidłowym
izolowaniem termicznym jej ścianek zewnętrznych. Jako izolację termiczną chłodziarki
najczęściej stosuje się warstwy styropianu, który nie przewodzi ciepła. Chłodziarki
sprężarkowe budowane są w wielu odmianach różniących się przeznaczeniem, czynnikiem
chłodzącym, typem sprężarki chłodniczej i innymi elementami. Przedstawiana tutaj
chłodziarka TS248, jest urządzeniem dwukomorowym, w którym górna komora spełnia rolę
zamrażalnika, a dolna chłodziarki. Schemat połączeń elektrycznych przedstawiony jest na
rys. 55. Większość znajdujących się obecnie na rynku urządzeń chłodniczych wykonywanych
jest jako konstrukcje sprężarkowe (zarówno urządzenia stosowanych w przemyśle
przetwórstwa spożywczego, jak i w handlu oraz dla użytku domowego. Chłodziarki
produkowane dla domu są bardzo różnorodne. Ich wielkości zaczynają się od około 150
litrów do prawie 400 litrów.
Rys. 55.
Schemat instalacji elektrycznej chłodziarki TS248A: 1 – wtyczka i przewód zasilający,
2 – listwa zaciskowa, 3– sprężarka, 4 – przekaźnik rozruchowy, 5 – wyłącznik nadmiarowy
(zabezpieczający), 6 – silnik sprężarki, 7 – blok regulacyjno–oświetleniowy, 8 – regulator
temperatury (mieszkowy), 9 – żarówka, 10 – wyłącznik oświetlenia, 11 – zerowanie metalowej
szafki (obudowy) chłodziarki, 12 – transformator zasilający grzałkę, 13 – przewody grzejne, U
r
– uzwojenie rozruchowe, U
g
– uzwojenie główne, IP – izolator przepustowy sprężarki
[Instrukcja napraw chłodziarek sprężarkowych Nr INC/1/83, Zakłady Zmechanizowane
Sprzętu Domowego POLAR]
Mniejsze chłodziarki wykonywane są tak, że spełniają tylko funkcję chłodniczą,
ale większość dużych urządzeń domowych, jest skonstruowana jako dwukomorowe. Jedna
komora jest chłodziarką, a druga zamrażarką.
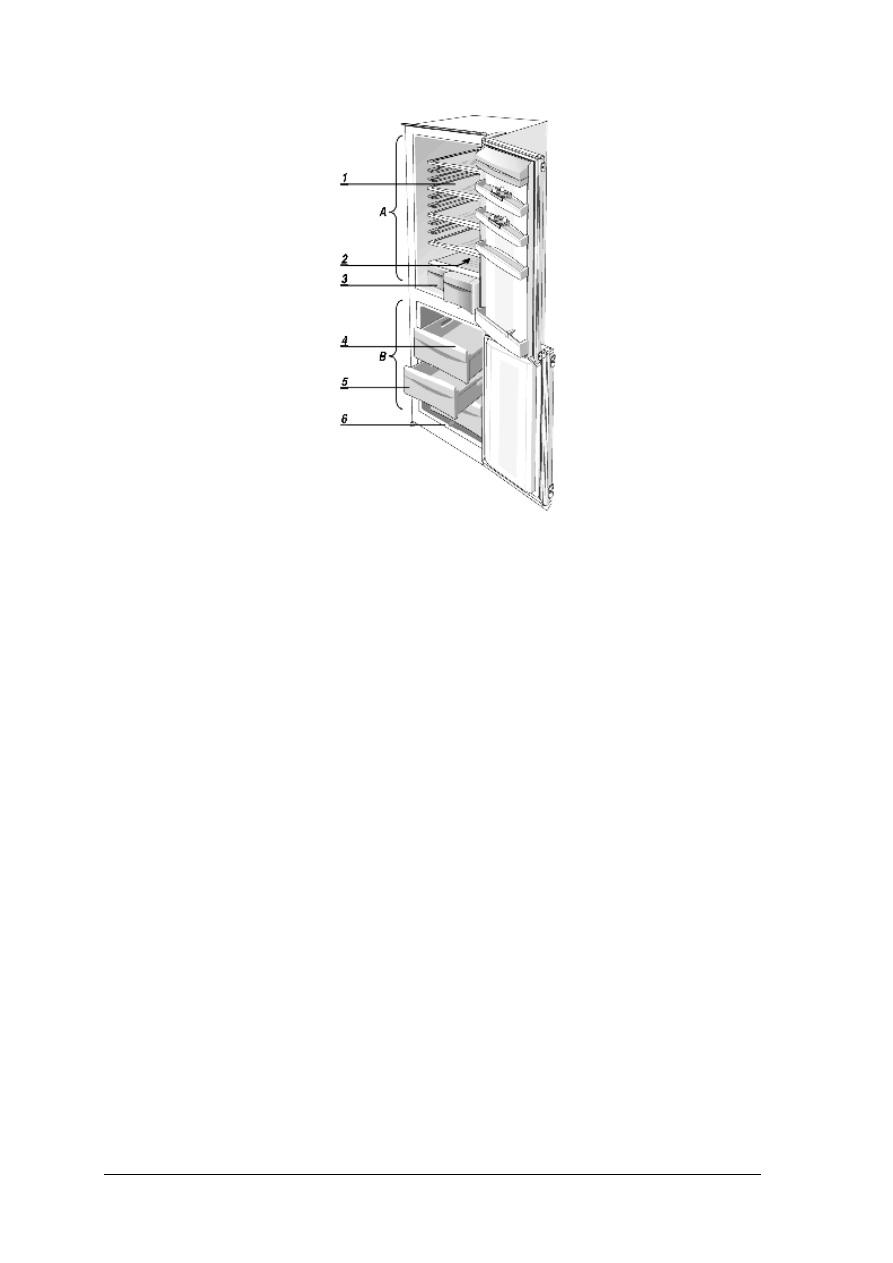
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
Rys. 56.
Chłodziarka dwukomorowa do montażu w meblach (A – chłodziarka; B – zamrażarka):
1 – półki druciane, 2 – półki szklane, pojemniki na warzywa, 4, 5 – szufladki zamrażarki,
6 – rowek na wodę [Chłodziarka z zamrażarką – Instrukcja obsługi]
Zamrażarka od chłodziarki różni się przede wszystkim temperaturą w komorze
chłodzącej. W chłodziarce temperatura zawsze wynosi powyżej 0°C, natomiast w zamrażarce
temperatura spada poniżej 0°C, co pozwala na zamrażanie produktów, i kilkakrotnie dłuższe
ich przechowywania. Część urządzeń chłodniczych wykonywana jest jako zamrażarki
skrzynkowe lub szufladkowe. Zamrażarki skrzynkowe (zamykane z góry – przykrywane
pokrywą) są łatwiejsze do uszczelnienia, i bardziej ekonomiczne i niezawodne w porównaniu
od ładowanych z boku. Udoskonalana termiczna technika izolacyjna pozwala teraz na
produkowanie dobrych urządzeń również ładowanych z boku, w których jako uszczelnienia
drzwi stosowane są uszczelki gumowe. Dawniej, drzwi chłodziarek zamykane były na zamki
zatrzaskowe – dzisiaj stosuje się uszczelki gumowe wypełnione magnesami, które
przyciągane do stalowej obudowy uszczelniają zamknięcie. W urządzeniach chłodniczych,
które wykonane są dwukomorowo, każda z komór ma inne przeznaczenie – najczęściej jedna
jest chłodziarką, a druga zamrażarką. Takie urządzenie musi być ładowane z boku. Przykład
takiego dwufunkcyjnego urządzenia chłodniczego przedstawia rys. 56 (do montażu
w meblach). W zamrażarce parowniki znajdują się pod każdą szufladką, a w chłodziarce
parownikiem jest jej wewnętrzna tylna ścianka. W chłodziarce parownik ma małą wydajność
chłodzącą, a w zamrażarce każdy z parowników ma dużą wydajność chłodzącą.
Pranie w pralce automatycznej polega na wytworzeniu względnego ruchu materiału
i kąpieli piorącej lub wody – podczas płukania. W zależności od względnego ruchu materiału
i kąpieli rozróżnia się możliwe sytuacje, gdy materiał:
−
jest nieruchomo umieszczony w płynącej kąpieli,
−
porusza się w nieruchomiej kąpieli,
−
porusza się w płynącej kąpieli,
−
jest natryskiwany cieczą piorącą lub wodą,
−
jest na przemian zanurzany w cieczy i wyżymany.
Historia pralek mechanicznych sięga połowy lat pięćdziesiątych XIX wieku. Pomijając
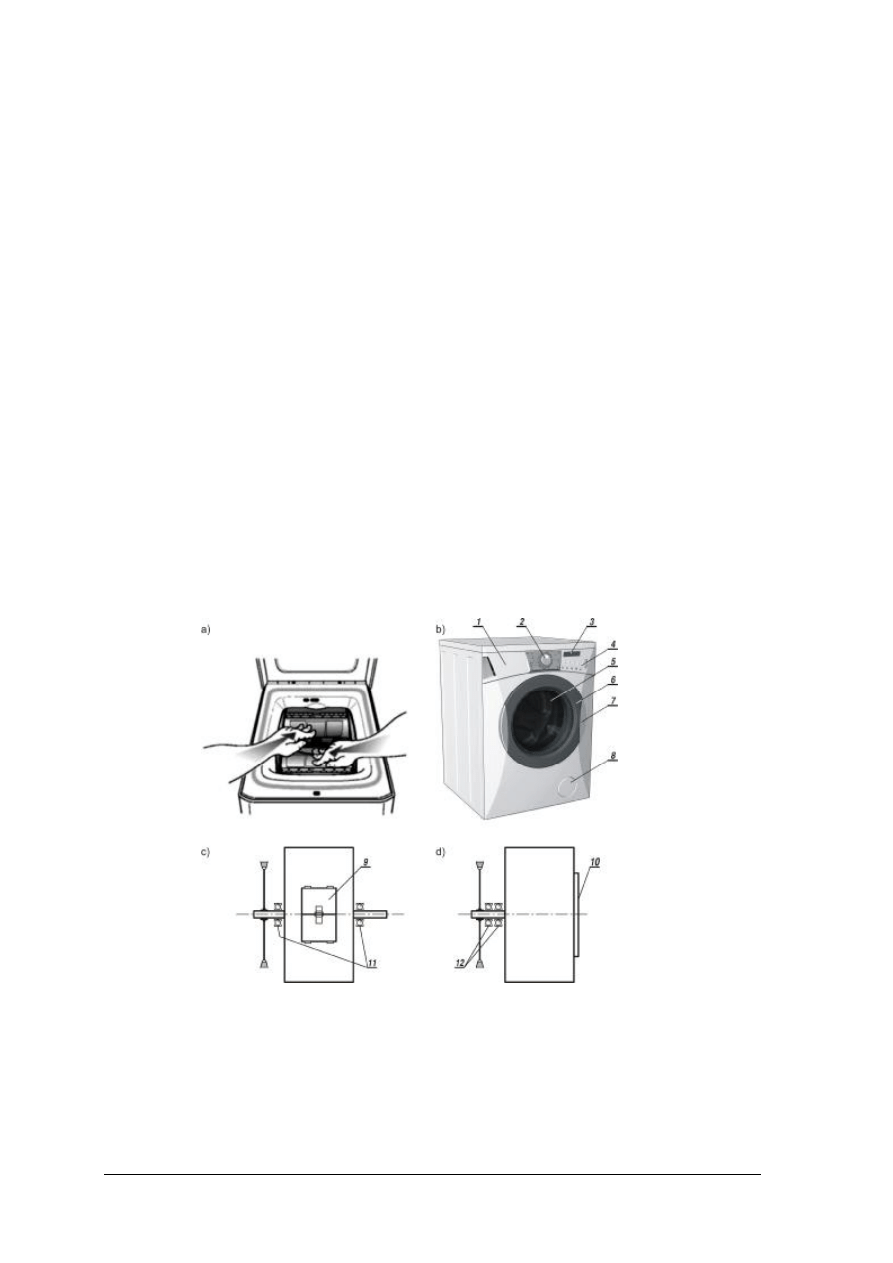
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
różne etapy wynalezienia pralki i etapy rozwoju tego wynalazku, trzeba jednak stwierdzić,
że już w 1934 roku istniała pralka, która sama podczas prania dozowała proszek do prania,
regulowała temperaturę oraz płukała. W 1937 roku zbudowano w USA pierwszą
automatyczną pralkę wykonującą czynności według z góry zaplanowanego programu, która
oprócz poprzednio wymienionych czynności wykonywała odwirowania, wykonując
odpowiednie procedury dokonywała automatycznego doboru poziomu wody, temperatury,
czy prędkości obrotowej. W początkach XXI wieku używane są głównie bębnowe automaty
pralnicze (pralki, suszarki, pralko–suszarki), a rzadko już – pralki wirnikowe.
Pralki automatyczne wykonywane są jako ładowane ładunkiem prania od góry albo
czołowo – przedstawiono to na rys. 57. Pralki ładowane od góry mają zamknięty bęben
obrotowy, który zawieszony jest na łożyskach po obu stronach bębna, więc cały układ pracuje
z mniejszymi obciążeniami łożysk. Zbiornik zamykany jest od góry, więc nie ma
niebezpieczeństwa wycieku wody z powodu uszkodzenia uszczelnienia drzwiczek. W pralce
ładowanej czołowo, jej budowa wymaga bębna bez osi z jednej strony, więc łożyska znajdują
się z jednej strony i dlatego są one bardziej obciążone niż w poprzednim typie. Ponadto,
bęben ma z jednej osi otwór wsadowy, zbiornik (obudowa bębna) również ma otwór z boku,
który musi być połączony elastycznym fartuchem z obudową. Obudowa ma drzwiczki dobrze
uszczelnione z obudową, a połączenie i uszczelnienie musi być odporne na wszelki wibracje.
Wadą pralki ze wsadem z boku jest zawieszenie jej obrotowego bębna tylko na jednej osi. Oś
ta połączona jest z bębnem z tyłu pralki. Taka konstrukcja jest bardziej narażona na drgania.
Rozwiązanie przedstawione na rys. 57a (i 57c) jest mniej narażone na niekorzystne
naprężenia mechaniczne i bardziej stabilne mechanicznie. Obecnie produkowane są pralkii
obu typów.
Rys. 57. Sposoby ładowania pralek automatyczna: a) pralka ładowana od góry, b) pralka ładowana
czołowo, c) zawieszenia bębna w pralce ładowanej od góry, d) zawieszenia bębna w pralce
ładowanej czołowo: 1 – szufladka dozownika środków piorących, 2 – pokrętło programatora,
3 – wyświetlacz LCD, 4 – przyciski sterowania, 5 – bęben, 6 – drzwiczki, 7 – dźwignia
otwierania drzwiczek, 8 – pokrywa filtra, 9 – drzwiczki otworu wsadowego na obwodzie
bębna, 10 – otwór wsadowy, 11 – łożyska wału bębna. [Pralka automatyczna WS 43100 –
Instrukcja obsługi, Slovenia]
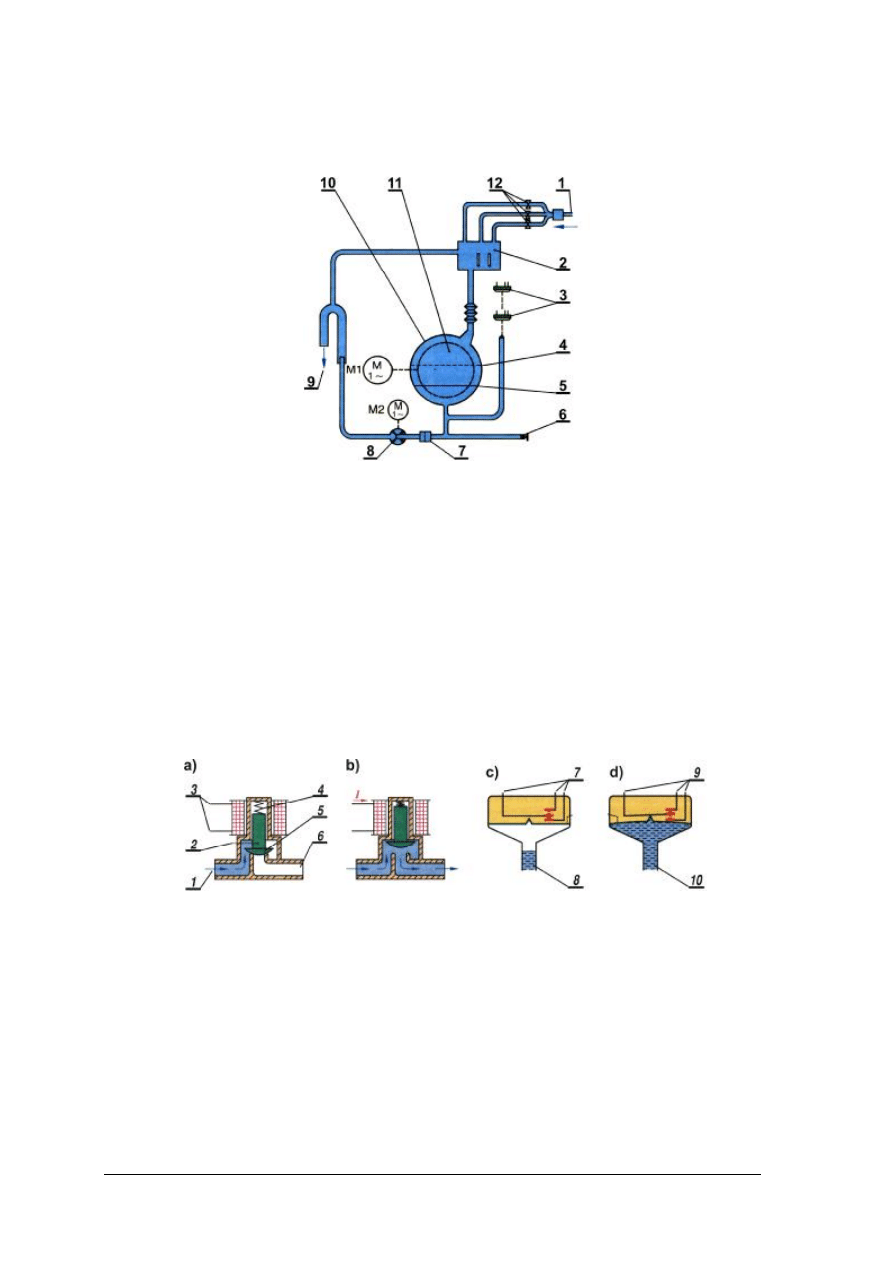
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
Współczesne pralki wykorzystują kombinowane sposoby prania – zarówno porusza się
kąpiel piorąca, materiał prany, a ponadto występuje zraszanie. Niezależnie jak pralka jest
ładowana, to musi ona być skonstruowana według schematu na rys. 58.
Rys. 58.
Budowa typowej pralki automatycznej: 1 – przyłącze do sieci wodociągowej, 2 – dozownik
środków piorących, 3 – czujniki ciśnienia normalnego i wysokiego poziomu wody, 4 – wysoki
poziom wody, 5 – normalny poziom wody, 6 – wężyk spustowy wody z układu pralki, 7 – filtr
dużych zanieczyszczeń, 8 – pompa odpompowywania wody z silnikiem napędowym, 9 – wąż
odpompowywania wody, 10 – główny zbiornik pralki (obudowa bębna) zamocowany
elastycznie do obudowy pralki, 11 – obrotowy bęben roboczy napędzany silnikiem głównym,
12 – elektrozawory doprowadzania wody [2, s. 231]
Pralka automatyczna działa według przyjętego algorytmu – programu. Wszystkie pralki
mają tzw. programatory, które sterują ich działaniem. Na omawianym rysunku nie ma
programatora. Są za to wszystkie urządzenia wykonawcze, których pracą programator steruje.
W programatorze elektromechanicznym cały program jest zapamiętany przez odpowiednio
wyprofilowane krzywki, które obracając się naciskają na sprężyste dźwignie styków
włączających odpowiednie urządzenie. W trakcie prania programator kontroluje za pomocą
czujników poziom wody w zbiorniku i temperaturę kąpieli piorącej.
Rys. 59. Budowa i działanie elektrozaworu a) zamknięty, b) otwarty: 1 – króciec wlotowy, 2 – rdzeń
elektromagnesu, 3 – końcówki cewki elektromagnesu, 4 – sprężyna dociskowa, 5 – membrana
zaworu, 6 – króciec wylotowy; czujnika poziomu wody, c) niski poziom, d) wysoki poziom: 7 – styki
przełączone w dolne położenie, 8 – niski poziom wody w rurce czujnika, 9 – styki czujnika
przełączone w górne położenie pod wpływem większego ciśnienia, 10 – wysoki poziom wody
w króćcu dolotowym czujnika [2, s. 232]
Na początku programator włącza jeden z elektrozaworów, którego otwarcie powoduje
pobieranie wody oraz jednoczesne wypłukanie środka piorącego z jednej z komór dozownika
do zbiornika. Woda jest wtedy pobierana do wnętrza głównego zbiornika pralki tak długo, aż
hydrostat „wykryje” wymagany poziom. Poziom wody zależny jest od wybranego programu
prania i jego warunków. Poziom wody w zbiorniku pralki sprawdzany jest za pomocą
hydrostatu (ciśnieniowy czujnik poziomu wody – rys. 59c i 59d).
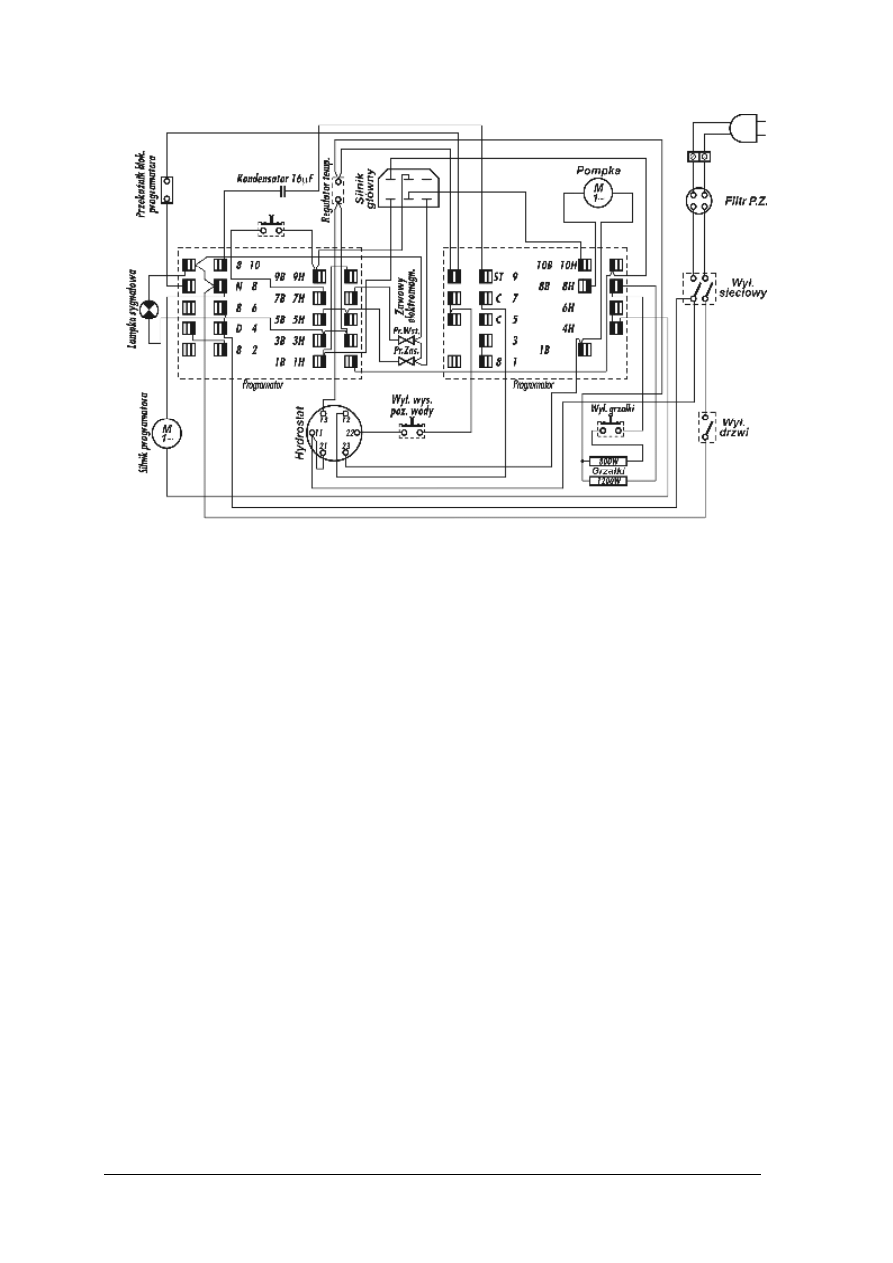
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
Rys. 60. Schemat elektrycznych połączeń w pralce „Luna” (PDE–385 prod. Polaru) [Instrukcja
napraw – Pralka Automatyczna „Luna” typ PDE–385, Zakłady Zmechanizowane
Sprzętu Domowego POLAR]
Czujniki mocowane są do obudowy pralki, a ze zbiornikiem łączą się za pomocą
elastycznych węży. W skład pralki wchodzi grzałka do podgrzewania wody, pompa
odprowadzania wody ze zbiornika, czujniki zamknięcia drzwiczek itp. Kompletny schemat
instalacji elektrycznej przedstawiono na rys. 60. Jeżeli jest za mało wody, to programator
otwiera elektrozawór pobierający wodę, jeśli natomiast temperatura kąpieli jest za niska, to
włączona zostaje grzałka – programator „czeka” wtedy na uzupełnienie poziomu wody lub
podgrzanie jej. Do prawidłowego przebiegu prania pralka musi wykonać pewną grupę
czynności. Wszystkie są one możliwe do wykonania pralki wyposażona jest w urządzenia
mechaniczne, elektryczne i elektromechaniczne lub elektroniczne oraz program zapamiętany
w programatorze. Od kilkudziesięciu lat pralki wyposażane są w programatory
elektromechaniczne, a od kilku lat stosowane są elektroniczne, w których głównym
elementem jest mikroprocesor. To on nadzoruje przebieg procesu prania, odpowiedni poziom
wody (kilka poziomów), temperaturę, prędkość wirowania, poziom drgań podczas pracy itp.
Stwarza to dużo nowych możliwości ustawiania programu prania, kontroli jego przebiegu
oraz możliwa jest łatwa zmiana programu sterującego – aby zmienić program sterujący
praniem wystarczy zmienić zawartość pamięci EEPROM programatora.
Kuchenka mikrofalowa jest urządzeniem kuchennym służącym do podgrzewania,
odmrażania, podgrzewania i gotowania środków spożywczych przeznaczonych na posiłki.
Współczesne, rozbudowane kuchenki umożliwiają również opiekanie potraw, ponieważ
połączone są w całość z grillem. Kuchenka mikrofalowa działa na zasadzie promieniowania
energii fal elektromagnetycznych o bardzo wielkiej częstotliwości (przyjęto f
r
= 2450 MHz).
Fala elektromagnetyczna rozchodząca się w przestrzeni natrafiająca na ciało będące
przewodnikiem prądu elektrycznego (np. antena radioodbiornika, czy telewizora) wytwarza
w nim siłę elektromotoryczną i przepływ zmiennego prądu elektrycznego. Promiennik
w kuchence mikrofalowej wysyła mikrofalę o dość znacznej mocy (od 600 W do ok. 1 kW)
na produkt żywnościowy z bliskiej odległości. Ponieważ wszystkie produkty żywnościowe
zawierają w sobie wodę (zamarzniętą), to w takim razie każdy produkt żywnościowy jest
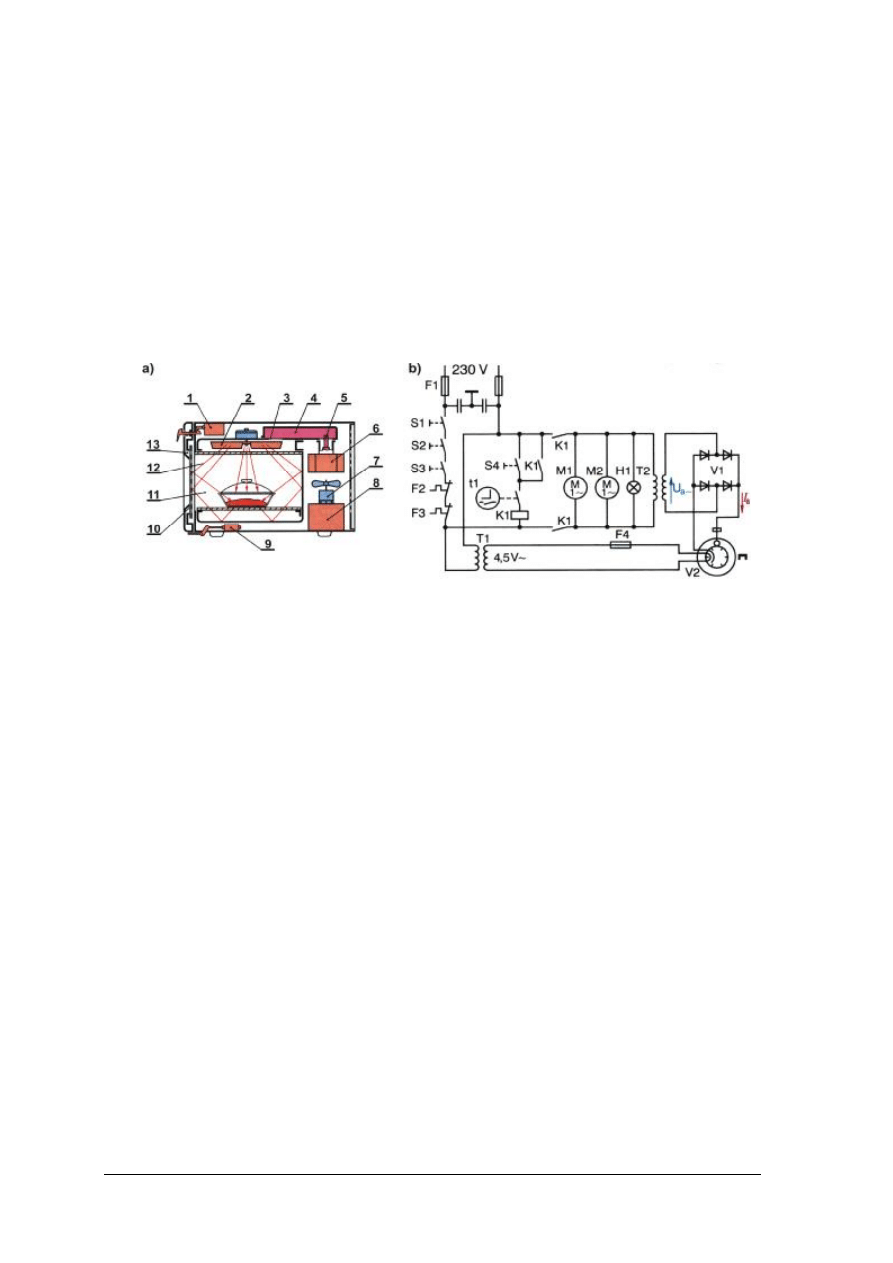
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
przewodnikiem prądu elektrycznego. Opromieniowanie żywności będącej w pewnym stopniu
przewodnikiem spowoduje indukowanie się w nich siły elektromotorycznej wielkiej
częstotliwości, pod wpływem której następuje przepływ zmiennych prądów elektrycznych
również o wielkiej częstotliwości Przepływ prądu przemiennego prądu w wodzie, w której
rozpuszczone są różne substancje organiczne powoduje drgania jonów, drganiach tych jonów
i ich molekuł. Powoduje to wydzielanie się dużych ilości ciepła. Najbardziej do tego nadają
się mikrofale o częstotliwości 2,45 GHz, ponieważ one najłatwiej wnikają w głąb żywności.
Powoduje to podgrzewanie i gotowanie, ale nie spowoduje jednak opiekania – nie będzie tzw.
„przypieczonej skórki” na powierzchni potrawy. Aby potrawa była opieczona konieczne jest
działanie promieniowania podczerwonego na jej powierzchnię – promieniowanie to
wytwarzane jest przez grill elektryczny, który posiada każda współczesna kuchenka
mikrofalowa. Budowa mechaniczna kuchenki mikrofalowej przedstawiona jest na rys. 61a.
Rys. 61.
Budowa kuchenki mikrofalowej: a) mechaniczna: 1, 9 – wyłączniki
bezpieczeństwa, 2 – reflektor, 3 – modulator, 4 – falowód, 5 – pręt
modulatora, 6 – magnetron, 7 – wentylator chłodzący, 8 – blok
elektronicznego sterowania, 10 – okno z perforowaną blachą, 11 – komora
robocza (grzejna), 12 – przebieg promieni m mikrofalowych, 13 – drzwiczki
przednie, b) schemat elektryczny [2, s. 230]
Podstawowym podzespołem kuchenki mikrofalowej jest generator mikrofal, tj. fal
elektromagnetycznych o bardzo wielkiej częstotliwości – jest nim magnetron (6). Energia
w nim wytwarzana przesłana jest za pośrednictwem falowodu (4) do promiennika, którego
zadanie spełnia tutaj reflektor (2) z modulatorem (3). Podzespoły kuchenki są tak
ukształtowane, aby cała promieniowana energia docierała do środka komory roboczej (11),
gdzie na podstawce może stać w pojemniku podgrzewana potrawa.
W kuchence mikrofalowej nie wolno używać naczyń metalowych, lub pojemników
z innych materiałów posiadających różne metalowe elementy (np. ozdobne). Może być to
przyczyną poważnych uszkodzeń, a nawet wybuchu takiego elementu.
Na rys. 61b przedstawiony jest schemat elektryczny kuchenki mikrofalowej. Wysokie
napięcie wytwarzane jest w niej przez transformator (T2) – wynosi ono od ok. 2,5 do 6 kV.
Magnetron (V2) zasilany jest prądem stałym (o wysokim napięciem) z prostownika (V1 –
mostek Graetza). Wnętrze kuchenki oświetla lampka z żarówką (H1). Ponieważ magnetron,
jego zasilacz i pozostałe elementy grzeją się, to chłodzi je powietrze nawiewane
wentylatorem napędzanym silnikiem (M1). Natomiast drugi silnik elektryczny (M2) obraca
reflektorem. Kuchenka posiada dużo zabezpieczeń, które w przypadku jakiegokolwiek
przypadkowe otwarcie drzwiczek musi odłączyć zasilanie (wyłączniki S2 i S3 –
bezwzględnie wyłączają w takim przypadku zasilanie całego urządzenia) Styki (F2) i (F3) to
zabezpieczenia termiczne zasilania kuchenki, wyłącznik (S1), to główny wyłącznik zasilania,
a zabezpieczenie (F4) to zabezpieczenie termiczne żarzenia katody magnetronu, która
zasilana jest poprzez transformator obniżający (T1). W przepadku tej kuchenki, jej czas pracy

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
jest sterowany zegarem mechanicznym (t1) i jego stykiem. Oprócz tego jest przekaźnikiem
(K1), który steruje włączaniem magnetronu i silników wykonawczych. Przekaźnik ten ma
styki zwierne (K1 i K2) do włączania elementów wykonawczych kuchenki oraz styk zwierny
(K1), który służy do podtrzymania zasilania. Styk zwierny (S4) służy do uruchomienia pracy
kuchenki i jest on zintegrowany z zegarem sterującym.
Uwaga:
1. Jeżeli którykolwiek z elementów zabezpieczających ulegnie uszkodzeniu, to pod żadnym
pozorem nie wolno wykonywać ich „bocznikowania”, czyli pomijania ich działania
zabezpieczającego.
2. Promieniowanie mikrofalowe wytwarzane w kuchence jest szkodliwe dla żywych
organizmów, więc nie wolno użytkować kuchenki przy otwartych drzwiczkach.
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak działa odkurzacz?
2. Jak działa domowa maszyna do szycia?
3. Jak jest zbudowana współczesna maszyna do szycia ze sterowaniem elektronicznym?
4. Jak działa chłodziarka domowa?
5. Co to jest zamrażarka?
6. Jak jest zbudowany domowy automat pralniczy?
7. Jaka jest rola programatora w pralce automatycznej?
8. Jak działa elektrozawór, czujnik poziomu wody w pralce automatycznej?
9. Jaka jest budowa i zasada działania kuchenki mikrofalowej?
4.6.3. Ćwiczenia
Ćwiczenie 1
Sprawdź stan techniczny po naprawie, przygotuj do pracy i uruchom odkurzacz.
Sposób wykonania ćwiczenia.
Aby wykonać ćwiczenie, powinieneś:
1) sprawdzić w instrukcji obsługi do jakiego pojemnika odkurzacz zbiera kurz (worek
z tkaniny, worek papierowy lub czy jest urządzeniem bezworkowym),
2) sprawdzić czy worek odkurzacza jest pusty, jeżeli nie, to należy opróżnić jego zawartość
lub wymienić (jeśli jest papierowy),
3) podłączyć wszystkie elementy ssawne (wąż elastyczny, ssawka itp.),
4) rozwinąć kabel zasilający i sprawdzić czy nie jest uszkodzony oraz podłączyć jego
wtyczkę do sieci energetycznej,
5) uruchomić wyłącznikiem silnik napędowy wentylatora odśrodkowego,
6) sprawdzić, czy ssawka poprawnie „ciągnie” powietrze.
Wyposażenie stanowiska pracy:
–
odkurzacz z kompletnym wyposażeniem (wąż elastyczny, ssawki, wkładki filtrujące itp.),
–
komplet worków papierowych (jeśli są potrzebne),
–
instrukcja obsługi odkurzacza.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
Ćwiczenie 2
Sprawdź stan techniczny po naprawie, przygotuj do pracy i uruchom maszynę do szycia.
Zszyj dwa kawałki tkaniny ze sobą za pomocą maszyny do szycia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) rozłożyć maszynę do szycia, podłączyć ją do sieci energetycznej,
2) nawinąć nić na szpuleczkę dolnego bębenka, założyć ją do niego,
3) założyć nici na elementy górnego toru prowadzenia i nawlec igłę,
4) wyciągnąć dolną nić i przewlec ją przez otwór na igłę na powierzchnię roboczą w płytce
ściegowej,
5) wyregulować naciąg nici górnej (i ewentualnie dolnej),
6) podłożyć złożone ze sobą kawałki tkanin pod stopkę i opuścić ją, wyregulować rodzaj
ściegu, jego długość oraz szerokość,
7) uruchomić maszynę nożnym regulatorem szybkości szycia (lub inaczej–w zależności
od konstrukcji) i zszyć tkaniny umieszczone pod stopką,
8) podnieść stopkę i delikatnie odciągnąć zszyte kawałki, a następnie odciąć nitki,
9) usunąć zabrudzenia maszyny (pył, kurz itp.), nasmarować ją olejem do mechanizmów
precyzyjnych (zgodnie z instrukcją obsługi), a następnie złożyć.
Wyposażenie stanowiska pracy:
–
maszyna do szycia z pełnym oprzyrządowaniem (stopki, igły, narzędzia itp.),
–
instrukcja obsługi maszyny,
–
kawałki tkaniny do zszycia,
–
olej do mechanizmów precyzyjnych.
Ćwiczenie 3
Sprawdź stan techniczny po naprawie, przygotuj do pracy i uruchom pralkę
automatyczną. Wykonaj pranie określonego ładunku prania w pralce automatycznej.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować instrukcję obsługi pralki,
2) ustawić pralkę na twardym i równym podłożu oraz wypoziomować ją,
3) podłączyć pralkę do sieci wodociągowej, do kanalizacji oraz do sieci zasilającej zgodnie
ze wskazówkami z instrukcji użytkownika,
4) umieścić ładunek prania w bębnie, a detergenty w odpowiednich zasobnikach,
5) wybrać odpowiedni program prania zgodnie z instrukcją użytkownika, wskazówek
nauczyciela i uruchomić pralkę sprawdzając, czy jest otwarty zawór odcinający dopływ
wody do pralki,
6) kontrolując okresowo stan realizacji programu prania obserwować działanie pralki,
7) po zakończeniu prania opróżnić bęben pralki.
Wyposażenie stanowiska pracy:
–
pralka automatyczna,
–
instalacja wodno–kanalizacyjna oraz energii elektrycznej,
–
detergenty, dzianiny i tkaniny do prania.
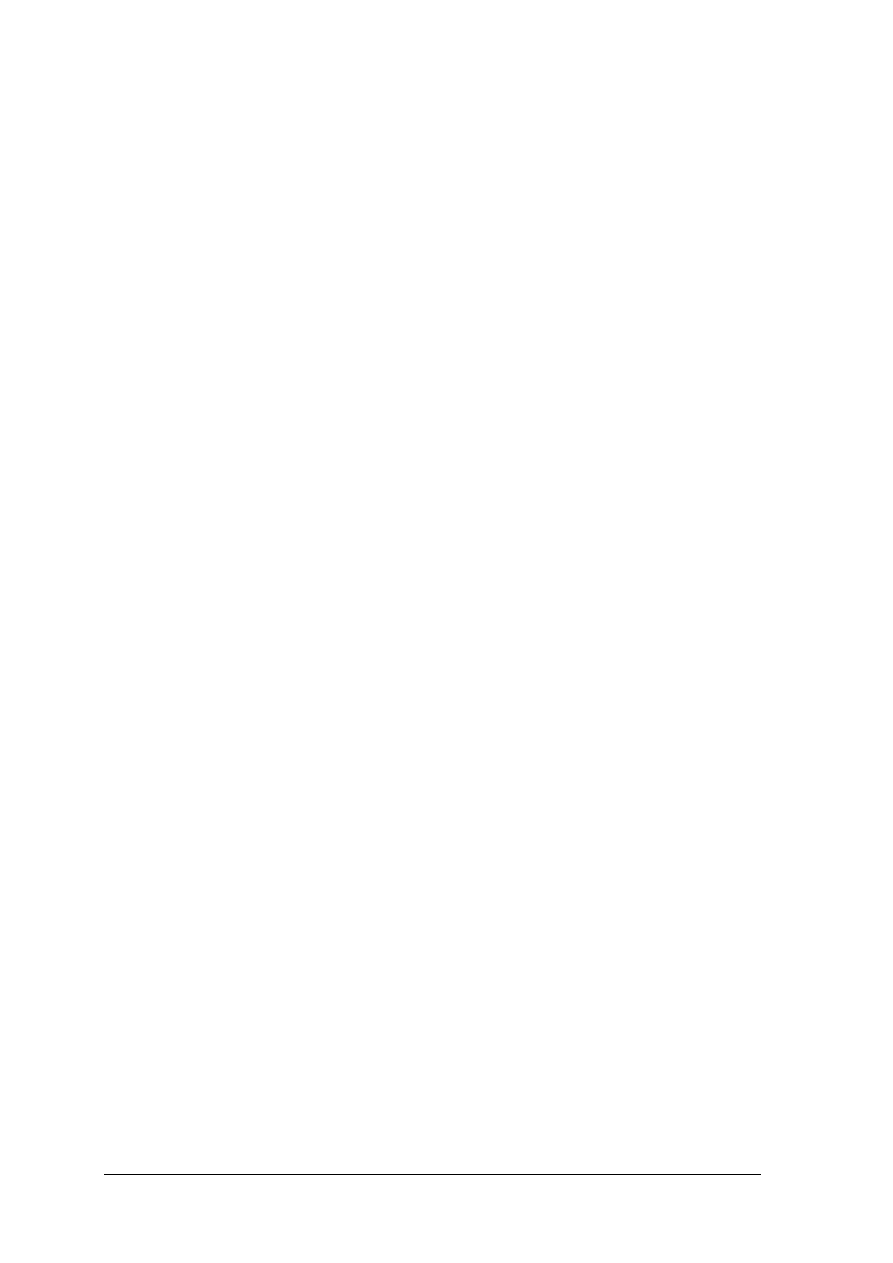
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1)
omówić budowę odkurzacza i jego działanie?
2)
przedstawić sposób tworzenia ściegu w maszynie do szycia?
3)
przedstawić sposób przygotowania maszyny do szycia
do pracy?
4)
omówić budowę i działanie chłodziarki sprężynowej?
5)
omówić ogólną budowę i działanie domowego automatu pralniczego?
6)
przedstawić sposób podłączenia pralki automatycznej do elektrycznej
i energetycznej, sieci wodociągowej?
7)
omówić budowę i działanie kuchenki mikrofalowej?
8)
przedstawić możliwości i ograniczenia kuchenki mikrofalowej?
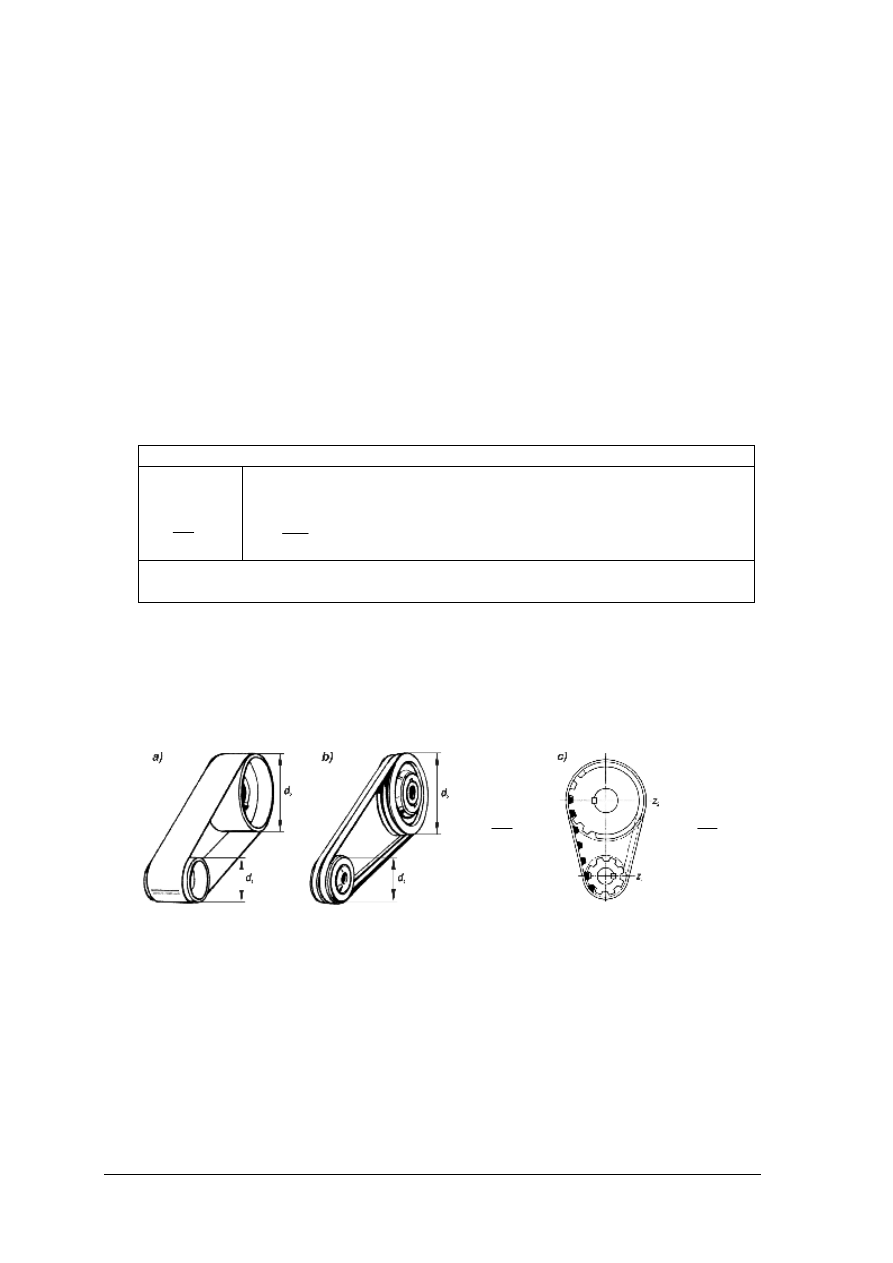
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
65
4.7. Przekładnie
4.7.1. Materiał nauczania
Przekładnia jest to urządzenie mechaniczne, mechanizm lub układ mechanizmów,
służący do przeniesienia napędu elementu napędzającego (czynnego) do elementu
napędzanego (biernego), z jednoczesną zmianą parametrów ruchu, tj. prędkości, siły lub
momentu siły. Ze względu na rodzaj zastosowanej zasady działania przekładni – rodzaj
wykorzystanych zjawisk fizyczny pośredniczących w przekazywaniu napędu – można je
podzielić na: mechaniczne, elektryczne, hydrauliczne, pneumatyczne.
W przekładni mechanicznej zastosowane są połączenia mechaniczne do przeniesienia
napędu i zmiany jego parametrów. Są one najczęściej stosowanym sposobem zmian
parametrów przekazywanego ruchu. Dzieli się je na: cięgnowe (pasowe, linowe, łańcuchowe),
cierne, śrubowe, zębate.
Tabela 2. Parametry charakteryzujące przekładnie mechaniczne [opracowanie własne]
prędkość obrotowa: wału napędowego (n
1
); wału napędzanego (n
2
)
przełożenie
przekładni
sprawność
η
:
1
2
n
n
=
i
o
u
N
N
=
η
gdzie: – N
u
– moc użyteczna (na wyjściu przekładni),
– N
o
– moc włożona (na wejściu przekładni).
Jeżeli: i<1, to przekładnia jest reduktorem (zmniejsza prędkość obrotową n),
i>1, to przekładnia jest multiplikatorem (przyspiesza n).
W przekładni cięgnowej człon napędowy ma kontakt z członem napędzanym za
pośrednictwem cięgna (pasa płaskiego, klinowego lub okrągłego, liny albo łańcucha), co
sprawia, że te człony mogą być od siebie odsunięte – nawet na dość znaczne odległości.
W przekładni pasowej oba koła: napędzające i napędzane, opasane są wspólnym pasem
pośredniczącym. W przekładniach pasowych mogą być stosowane pasy płaskie, klinowe,
okrągłe i zębate (rys. 62).
2
1
d
d
i
≤
2
1
z
z
i
=
Rys. 62.
Przekładnia pasowa: a) z pasem płaskim, b) z paskiem klinowym (dwa paski),
z pasem zębatym [14, s. 206]
Zaletami przekładni pasowej jest: możliwość przekazywania napędu na dużą odległość
(do 15 m), dowolność ustawienia osi wałów (i kół pasowych), możliwość uzyskania
zmiennych przełożeń, wyłączania napędu oraz zmiany kierunku obrotów, bezszumna praca,
tłumienie drgań, możliwość przeciążania ich (przy chwilowym przeciążeniu następuje poślizg
pasa – nie uszkodzą się), prosta i tania konstrukcja, prosta obsługa (np. samej przekładni nie
trzeba smarować).
Wadami przekładni pasowej są: występowanie poślizgu (zmiany przełożenia i), duże
naciski na wały i łożyska, wyciąganie pasów wyciągają się (konieczna jest okresowa
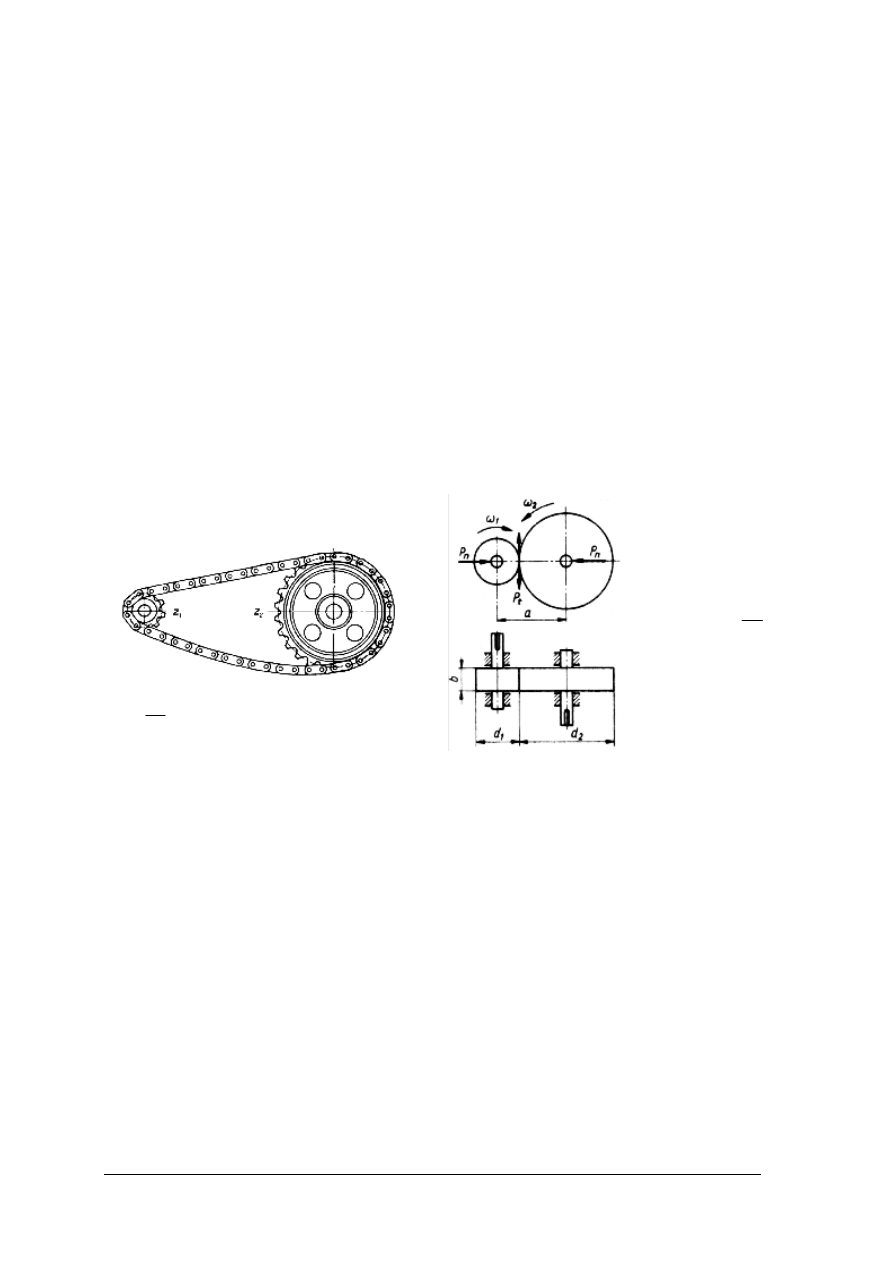
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
66
regulacja naciągu), wrażliwość na smary, chemikalia, zapylenie, wilgotność, temperaturę
środowiska i elektryzowanie się.
Przekładnie pasowe z pasem płaskim stosowane były w napędach maszyn, gdy
odległości między osiami są duże, kiedy występuje przy tym znaczna prędkość kątowa
i wymagana jest równomierna praca. Pasy klinowe stosowane są przy małych odległościach
między osiami, przy dużym stopniu przełożenia, przy przekazywaniu ruchu na kilka kół,
a także przy pionowych osiach obrotu kół. W mechanizmach precyzyjnych najczęściej
stosowane są przekładnie z paskami gumowymi o przekroju kwadratowym lub okrągłym,
a największe zastosowanie znalazły tutaj przekładnie z paskami zębatymi (nie trzeba w nich
regulować naciągu, a przełożenie jest stałe).
Przekładnia linowa zbudowana jest z kół linowych: napędowego i napędzanego. Były
stosowane w przekazywaniu napędu na dość duże odległości, ale wyszły prawie całkowicie
z użycia, wyparte przez inne rodzaje napędów – chociażby silników elektrycznych.
Przekładnie łańcuchowe są to przekładnie należące do przekładni cięgnowych
o powiązaniach kształtowych, poprzez zazębianie się kół z cięgnem. Przekładnia taka składa
się z dwóch kół uzębionych (nazywanych również kołami łańcuchowymi) oraz opasującego
je łańcucha, który jest cięgnem giętkim, składającym się ze sztywnych ogniw połączonych
ze sobą przegubowo. Przykład takiej przekładni przedstawia rys. 63.
2
1
z
z
i
=
2
1
d
d
i
≤
Rys. 63. Przekładnia łańcuchowa [14, s. 207]
Rys. 64. Przekładnia cierna [14, s. 149]
Przekładnia łańcuchowa w porównaniu z pasową ma następujące zalety: możliwość
przenoszenia dużej siły obwodowej, małe obciążenie wałów i łożysk, brak poślizgu (ma
niezmienne przełożenie). Jeżeli porównywać ją z przekładnią zębatą, to zaletami są: duża
dowolność rozstawu osi kół (max. 5÷8 m), łagodzenie gwałtownych szarpnięć i uderzeń.
Wadami przekładni łańcuchowych są: hałaśliwa praca, konieczność regulacji zwisu,
konieczność jej smarowania, wały muszą być do siebie równoległe, brak zabezpieczania
innych mechanizmów napędu od przeciążeń, konieczność dokładnego wykonania łańcucha,
duży koszt przekładni. Przekładnie te są stosowane do napędu motocykli, motorowerów
i rowerów, a także do napędu układu rozrządu w silnikach spalinowych.
Przekładnie cierne, w założeniach są jednymi z najprostszych rodzajów przekładni.
Przykład schematyczny jej działania przedstawia rys. 64. Osie koła napędowego
i napędzanego mają równoległe do siebie osie obrotu, a ich powierzchnie obwodowe
wywierają na siebie duży nacisk, aby tarcie między nimi było duże (powierzchnie te często
pokrywa guma lub skóra) – tylko wtedy przekładnia poprawnie pracuje. Powoduje to, że ich
wały i łożyska są dość mocno obciążone. Powierzchnie cierne nie mogą być w żaden sposób
uszkodzone, ponieważ zmniejsza się wtedy lub zanika tarcie i związany z tym przekazywany
moment napędowy. W mechanice precyzyjnej ten typ przekładni jest wykorzystywany
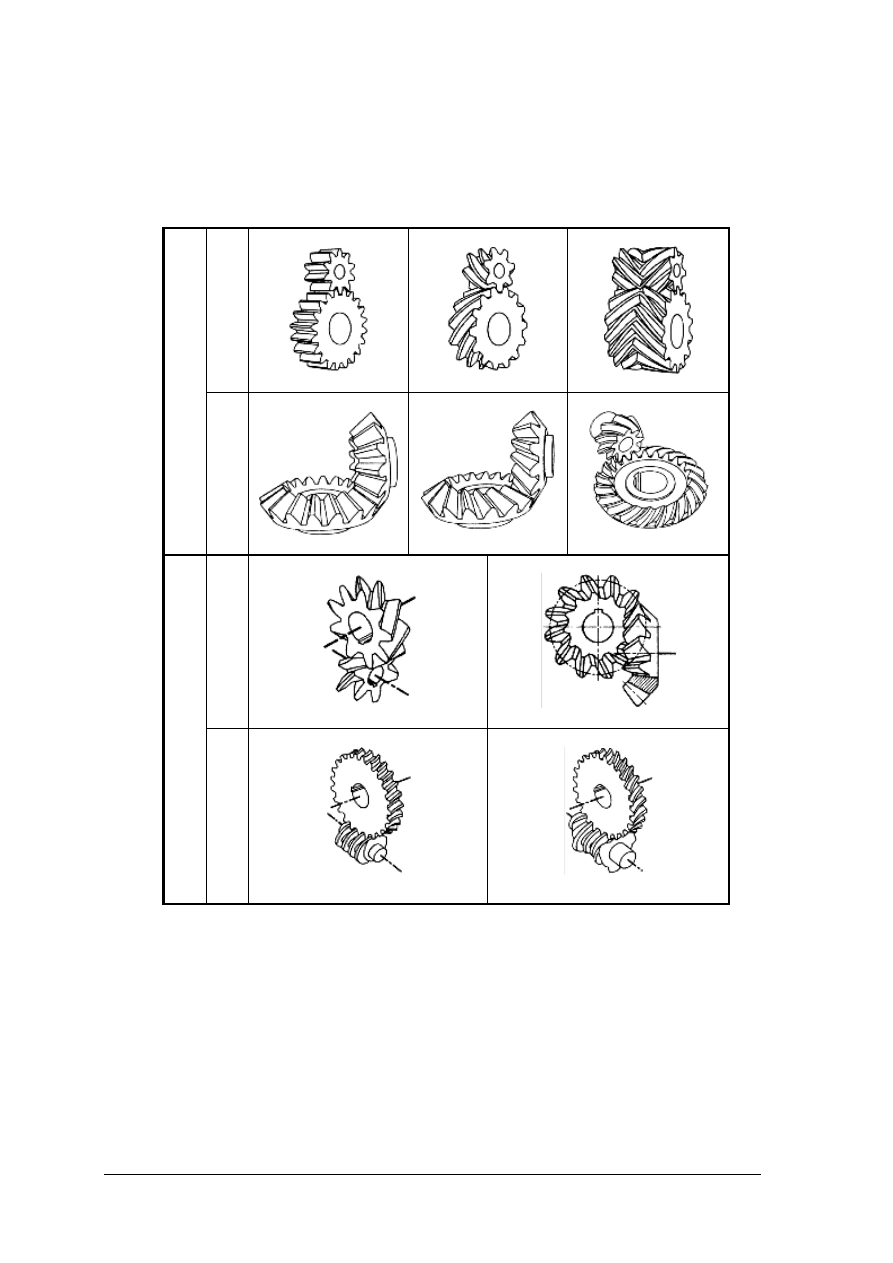
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
67
sporadycznie do napędu rzadko używanych mechanizmów pomocniczych.
Przekładnia zębata to przekładnia mechaniczna, w której do przeniesienia napędu
używane są koła zębate, sprzęgnięte ze sobą zębami. Przekładnie te można klasyfikować
na różne sposoby. Jednym z nich może być klasyfikacja kinematyczna.
Tabela 3. Kinematyczna klasyfikacja przekładni zębatych
[12, s. 28]
I.
W
a
lc
o
w
e
(ró
w
no
leg
łe)
a)
z zębami prostymi
b)
z zębami śrubowymi
c)
z z. strzałkowo–daszkowymi
P
rzek
ła
dn
ie
z
ęb
at
e
czo
ło
we
II
.
S
to
żko
w
e
(k
ąt
o
w
e)
a)
z zębami prostymi
b)
z zębami śrubowymi
c)
z zębami łukowymi
III
.
H
yp
e
rbo
lo
id
al
ne
a)
walcowe
b)
stożkowe (hypoidalne)
P
rzek
ła
dn
ie
z
ęb
at
e
śr
ubo
we
IV
.
Śl
im
a
ko
we
a)
walcowa
b)
globoidalna
Oprócz wymienionych w tabeli rodzajów przekładni trzeba jeszcze wśród nich wyróżnić
przekładnie (rys. 65): walcową czołową o zazębieniu wewnętrznym z dużym kołem
uzębionym wewnętrznie, walcową o uzębieniu zewnętrznym z zębatką prostą (o zębach
prostych lub śrubowych).
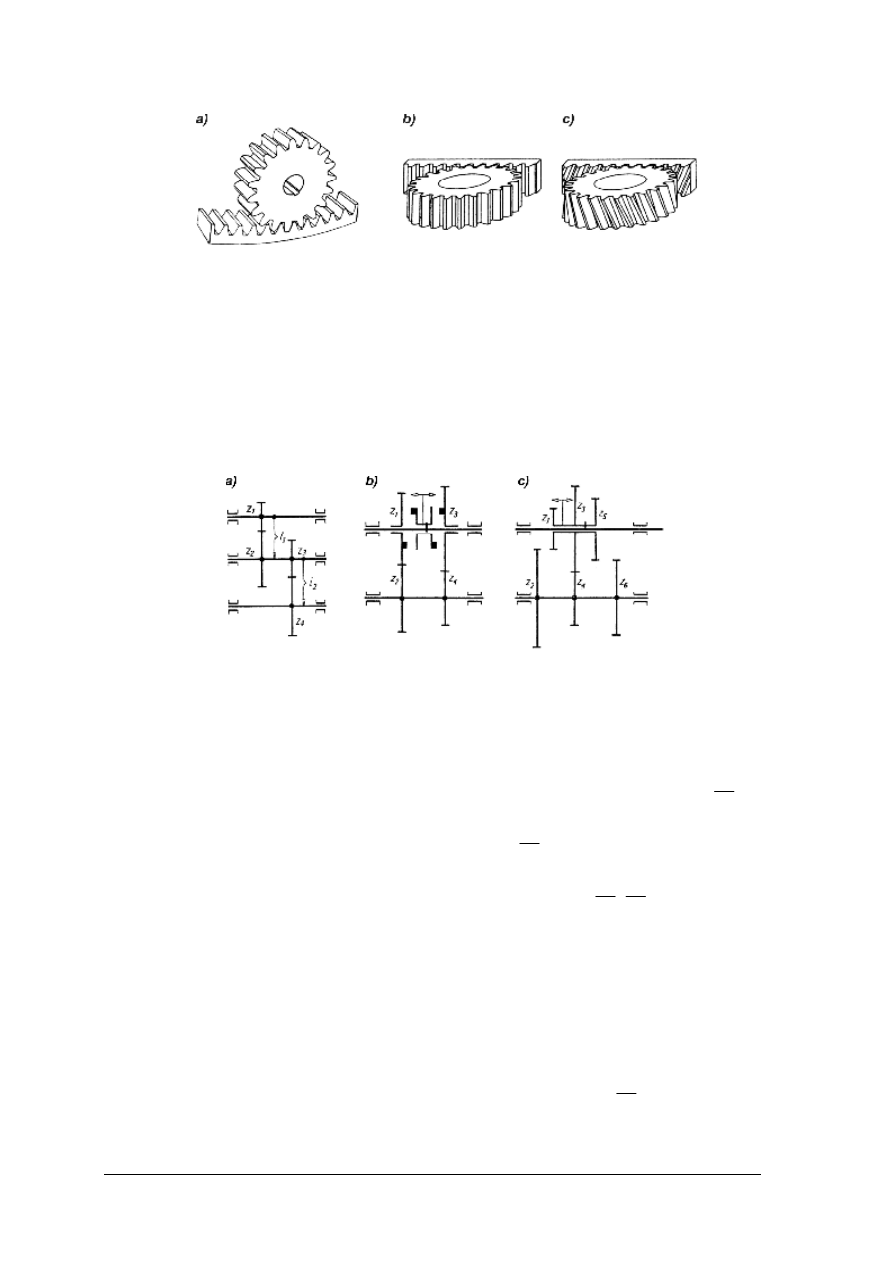
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
68
Rys. 65. Przekładnie zębate czołowe: a) o zazębieniu wewnętrznym, b) z zębami prostymi
zazębionymi z zębatką prostą, c) z zębami skośnymi zazębionymi z zębatką prostą
[12, s. 28]
Przekładnie zębate ze względu na liczbę stopni zazębienia dzielą się na: jednostopniowe
i wielostopniowe (o stałym przełożeniu oraz o skokowo zmiennym przełożeniu).
W przekładniach jednostopniowych oraz wielostopniowych o stałym przełożeniu, przełożenie
przekładni i nie zmienia się. Często konieczne jest, aby przekładnia miała kilka przełożeń,
a nie jedno. Wtedy stosowane są przekładnie wielostopniowe o zmiennym przełożeniu
(skrzynie biegów). Przykład przekładni wielostopniowych o stałym i zmiennym przełożeniu
przedstawiają schematy z rys. 66.
Rys. 66.
Przekładnie złożone: a) wielostopniowa o stałym przełożeniu, b) dwurzędowa
o stałym zazębieniu kół zębatych i zmiennym przełożeniu przełączanym
sprzęgłem kłowym (dwubiegowa), c) trzyrzędowa o zmiennym przełożeniu przez
zmianę zazębianych kół (trzybiegowa) [14, s. 89]
Przekładnia zębata z rys. 66a jest przekładnią dwustopniową. Wałem napędowym jest
pierwszy wał od góry. Dla pierwszej pary kół zębatych przełożenie i
1
wynosi:
2
1
1
z
z
=
i
. Dla
drugiego stopnia przełożenie przekładni i
2
wynosi:
4
3
2
z
z
=
i
. Cała dwustopniowa przekładnia
ma przełożenie i, które określa następującą zależnością:
4
3
2
1
2
1
z
z
z
z
=
i
i
=
i
⋅
⋅
.
W przypadku przekładni z rys. 66b koło zębate z
1
jest na stałe zazębione z kołem z
2
,
a koło z
3
z kołem z
4
. Koła z
2
i z
4
połączone są na stałe z dolnym wałem, a koła z
1
i z
3
poruszają się niezależnie od górnego wału – jest on ich osią obrotu, ale nie są z nim połączone
na stałe. Między kołami z
1
i z
3
górny wał posiada wielowypust, po którym przesuwa się piasta
sprzęgła kłowego (obraca się ona współbieżnie z górnym wałem). Sprzęgło to może połączyć
górny wał albo z kołem zębatym z
1
albo z kołem z
3
, ale nie jednocześnie z dwoma – tylko na
przemian. Jeżeli sprzęgło sprzęgnie górny wał z kołem zębatym z
1
, to wtedy efektywnie
pracują koła zębate z
1
i z
2
, przełożenie między wałami wynosi:
2
1
z
z
=
i
. W tym przypadku
górny wał napędza poprzez sprzęgło sprzęgnięte z kołem z
1
, koło z
2
. Koło z
3
, porusza się
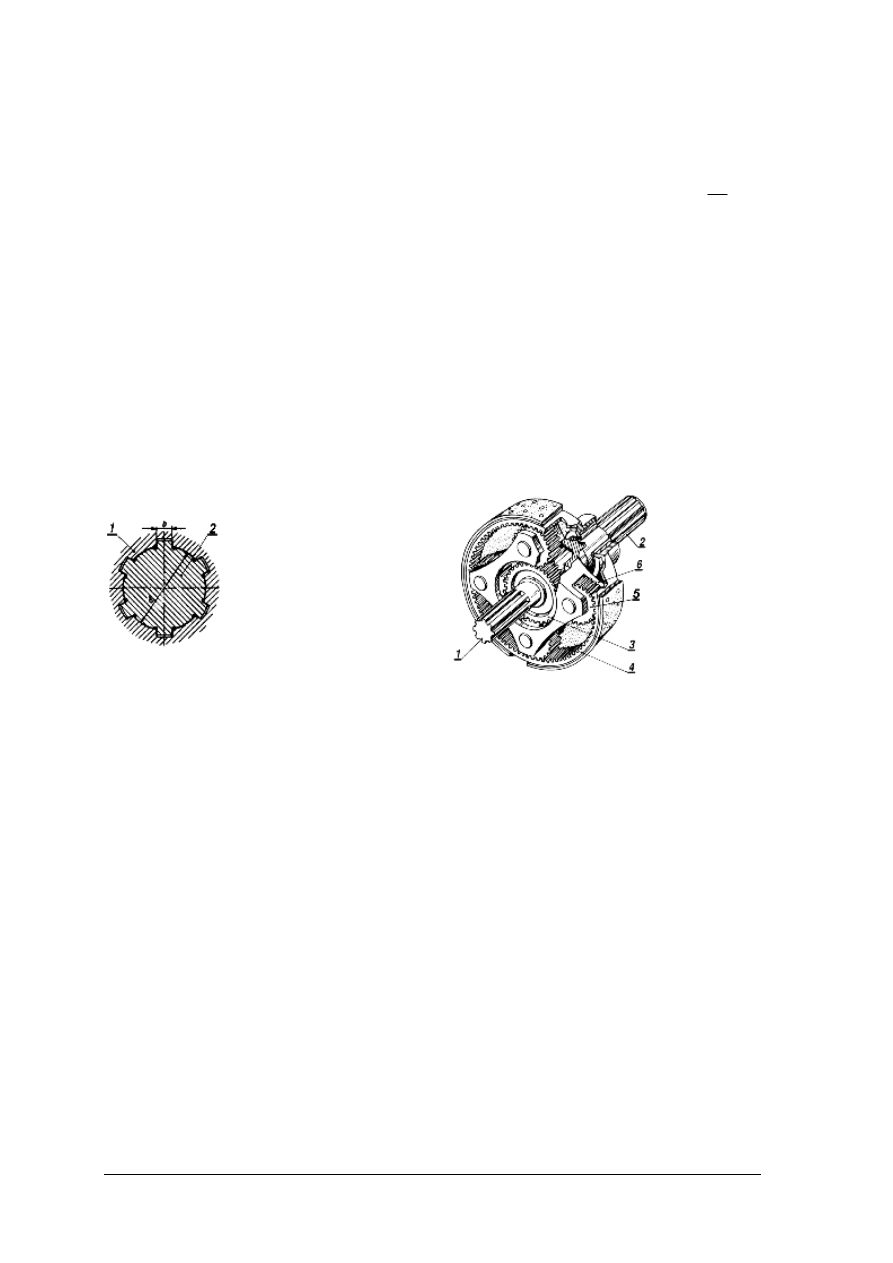
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
69
wtedy luzem z prędkością określoną przez stosunek ilości zębów kół z
4
do z
3
, ale nie ma to
żadnego wpływu na obroty wału dolnego. Jeżeli jednak sprzęgło kłowe zostanie przesunięte
na górnym wale w prawe położenie, to wtedy nie ma połączenia między wałem i kołem z
1
.
Wał górny napędza wtedy koło zębate z
3
, a więc przekładnia ma przełożenie:
4
3
z
z
=
i
.
Przekładnia z rys. 66b jest to przekładnią dwubiegową, czyli o jednym z dwóch
przełożeń. Przykład z rysunku 66c przedstawia połączone w jeden nierozerwalny zespół koła
z
1
, z
3
i z
5
. Cały ten zespół obraca się razem, współbieżnie z górnym wałem napędowym i jako
jedna całość może być przesuwany po wielowypuście tego wałka. Natomiast koła zębate
dolnego wału połączone są z nim na stałe. Przesuwanie zespołu górnego powoduje, że albo
zazębione są koła z
1
i z
2
, albo z
3
i z
4
, albo też z
5
i z
6
. W zależności od tego, która para kół jest
zazębiona (a więc, który rząd przekazuje napęd), od tego zależy przełożenie tej przekładni.
Przekładnia ta jest przekładnią trzybiegową.
Wielowypust jest tutaj wykorzystywany do połączenia przesuwnego między wałem
i kołem (pasowym lub zębatym itp.). W tym przypadku chodzi o wzdłużne rowki na wale.
Przekrój poprzeczny tego połączenia przedstawia rys. 67. Połączenie to wykonane jest
z pasowaniem „luźnym”, tzn. piasta koła jest sprzęgnięta stałe, ale może się ona przesuwać
wzdłuż rowków.
Rys. 67. Połączenie wielowypustowe luźnie:
1 – wielowypust wewnętrzny w piaście koła
zębatego, 2 – wielowypust zewnętrzny na
wale napędowym [11, s. 71]
Rys. 68. Przekładnia obiegowa: 1 – wał napędowy,
2 – wał napędzany, 3 – koło centralne
(słoneczne), 4 – koło centralne nieruchome,
5 – satelita, 6 – jarzmo osadzone na wale
napędzanym [15, s. 303]
Jedną za wersji przekładni zębatych jest przekładnia obiegowa (rys. 68), która często
nazywana jest przekładnią planetarną. Przekładnia ta jest dość uniwersalną konstrukcją, która
pozwala na budowę zwartych przekładni o zmiennych stopniach przełożenia, które mogą być
dość prosto sterowane i mogą przenosić znaczne moce.
W mechanizmach precyzyjnych w robotyce stosowana jest przekładnia falowa.
Charakteryzuje się ona dużym przełożeniem przy stosunkowo małych rozmiarach. Typowe
przełożenia tego typu przekładni, to i = 1:50 ÷ 1:160, przy średnicach zewnętrznych obudowy
55 ÷ 220mm. Mają one duże przełożenia i jednocześnie stosunkowo małe rozmiary, dlatego
nadają się do napędzania ramion robotów przemysłowych Przekładnia taka (rys. 69)
zbudowana jest z zewnętrznego nieruchomego pierścienia uzębionego wewnętrznie (3), który
może być jednocześnie korpusem obudowy, elastycznego wieńca (2) uzębionego zewnętrznie
i połączonego z wałem napędzanym „generatora fali” (4), czyli owalnej tarczy połączonej
z wałem napędzającym.
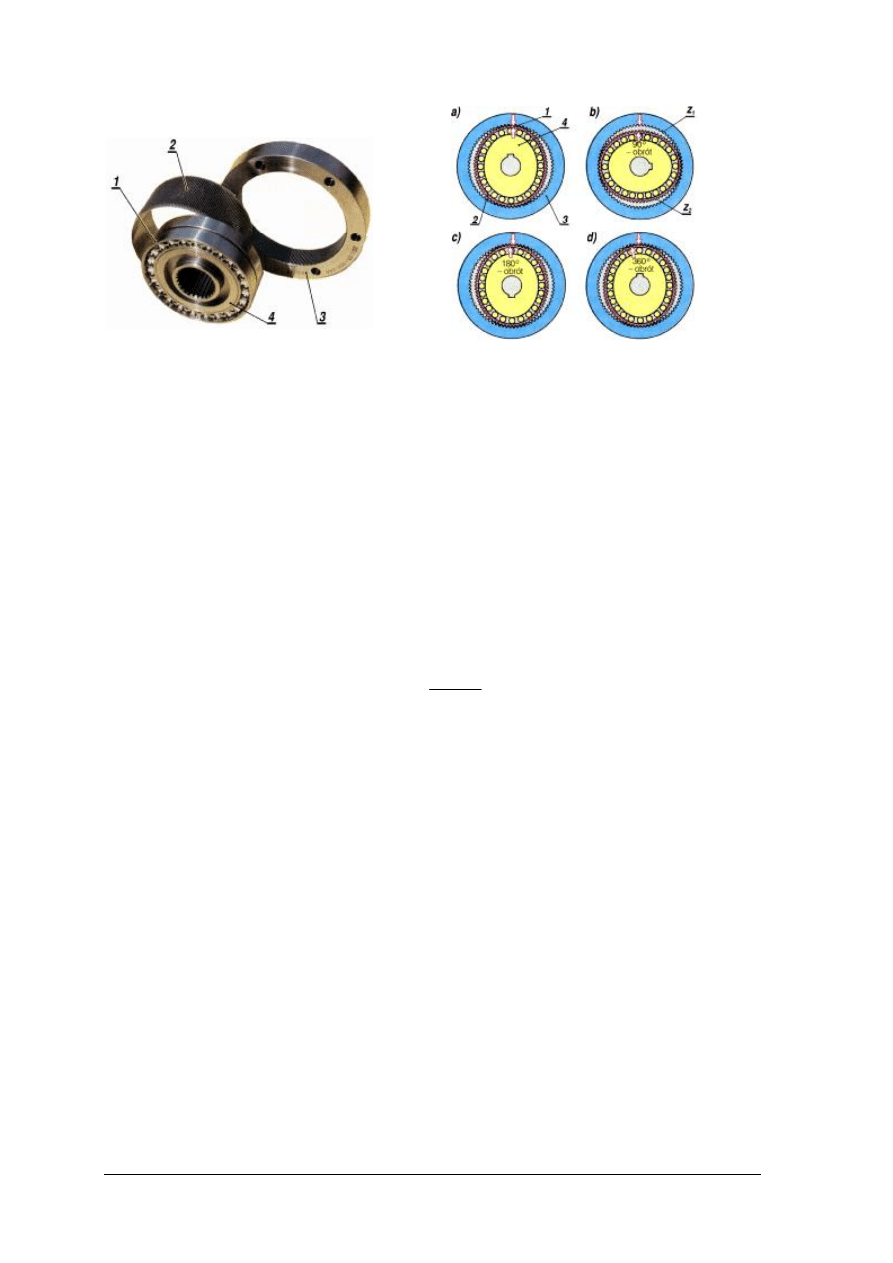
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
70
Rys. 69. Elementy przekładni falowej: 1 – punkt styku
(czoło generatora fali), 2 – tuleja elastyczna
o uzębieniu zewnętrznym, 3 – pierścień
z uzębieniem wewnętrznym, 4 – owalna
tarcza napędzająca (generator fali) [13, s.
277]
Rys. 70. Sposób działania przekładni falowej:
a) położenie
początkowe,
b)
obrót
generatora fali o 90°, c) obrót generatora
fali o 180°, d) obrót generatora fali
o 360°: 1 – miejsce początkowe
zazębienia, 2 – wewnętrzny elastyczny
wieniec zębaty, 3 – nieruchomy wieniec
zębaty, 4 – generator fali [13, s. 277]
Działanie przekładni ilustruje rys. 70. Jest na nim przedstawione schematycznie działanie
przekładni dwufalowej. Nieruchomy wieniec zewnętrzny (1) ma w porównaniu z elastycznym
wieńcem wewnętrznym (2) niewiele mniej zębów. Generator fali (4) powoduje, że wieńce
stykają się i zazębiają w dwóch przeciwległych miejscach. Podczas obrotów wału
napędowego obracającego generatorem fali wewnętrzny wieniec zazębia się z następnymi
zębami, powodując obrót wału napędzanego. Charakterystyczne dla tej przekładni jest to,
że wał napędzany obraca się w stronę przeciwną niż napędzający. Przełożenie tej przekładni
określone jest wzorem:
2
2
1
z
z
z
i
−
=
,
gdzie z
1
i z
2
, to ilości zębów zgodnie z rys. 70. Przekładnie te są wykonywane w różnych
wersjach. Jeżeli elastyczny wieniec styka się z zewnętrznym w dwóch miejscach,
to przekładnia jest dwufalowa, jeśli w trzech, to trzyfalowa itd. Najczęściej przekładnia
trzyfalowa może przenosić większe moce niż dwufalowe o podobnych wymiarach, ilości
zębów, czterofalowa większe niż trzyfalowa itd.
4.7.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest przekładnia mechaniczna i do czego jest stosowana?
2. Jakie są rodzaje przekładni cięgnowych i ich cechy?
3. Omów budowę działanie i zastosowanie przekładni ciernych?
4. Jaki znasz podział przekładni zębatych?
5. Jak działa przekładnia zębata o zmiennym przełożeniu?
6. Jak działa przekładnia falowa?
7. Jakie jest zastosowanie przekładni falowych?
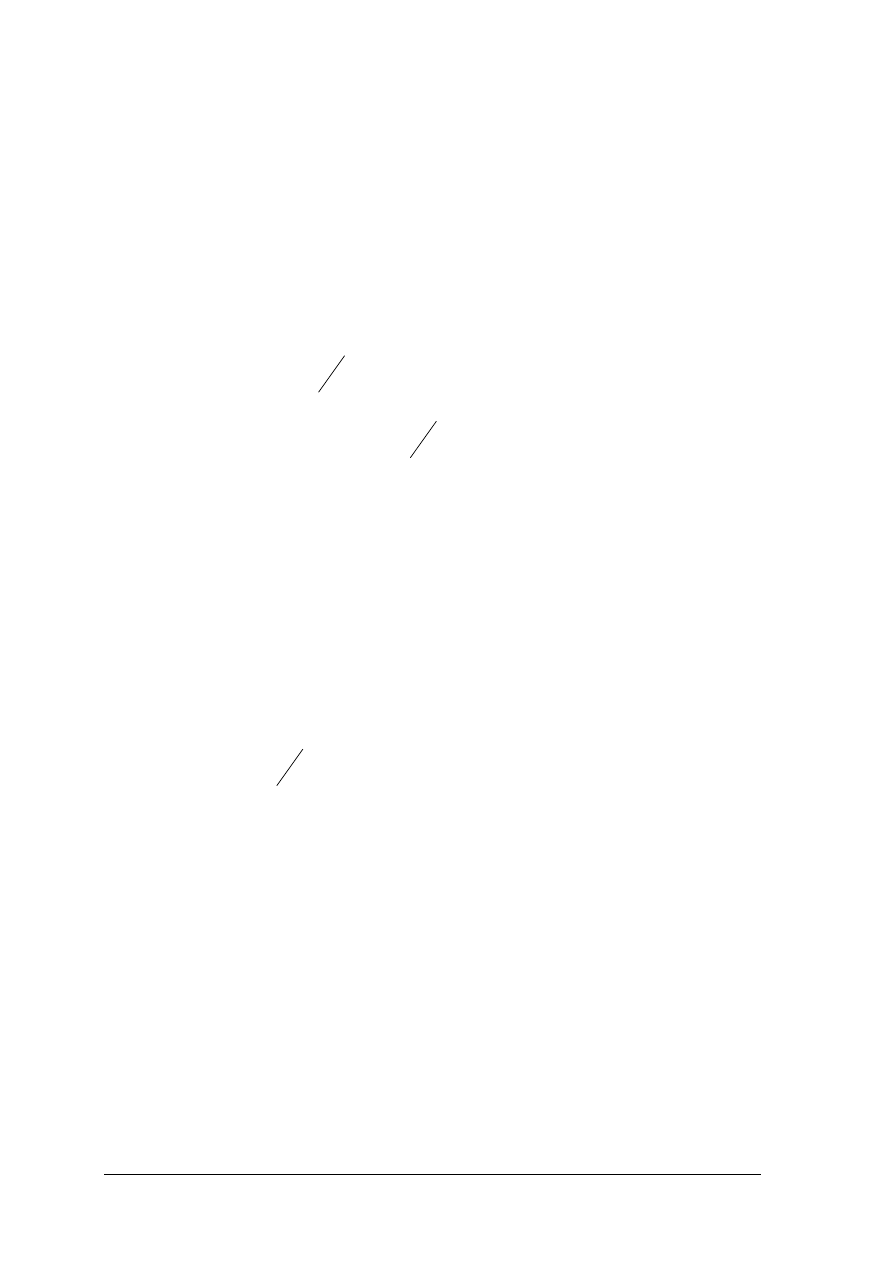
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
71
4.7.3. Ćwiczenia
Ćwiczenie 1
Określ rodzaje przekładni pasowych i ich przełożenia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wybrać określoną przez nauczyciela przekładnię,
2) określić, jaka to przekładnia (z pasem płaskim, klinowym, czy zębatym),
3) dla przekładni z paskiem płaskim lub klinowym zmierzyć średnice kół pasowych
(d
1
–średnica koła napędzającego, d
2
–koła napędzanego) i obliczyć przełożenie przekładni
zgodnie ze wzorem:
2
1
d
d
i
=
,
4) dla przekładni z paskiem zębatym (gdzie z
1
–koło napędzające, z
2
–napędzane) przełożenie
przekładni wyliczyć z zależności
2
1
z
z
i
=
.
Wyposażenie stanowiska pracy:
–
kilka przekładni pasowych,
–
suwmiarka do mierzenia średnicy kół pasowych.
Ćwiczenie 2
Określ rodzaj przekładni zębatej i stopień jej przełożenia:
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wybrać określoną przez nauczyciela przekładnię,
2) określić jaka to przekładnia (z pasem płaskim, klinowym, czy zębatym),
3) sprawdzić liczbę zębów kół zębatych i obliczyć przełożenie przekładni zgodnie
z zależnością:
2
1
z
z
i
=
,
(gdzie z
1
–liczba zębów koła napędzającego, z
2
–liczba zębów
koła napędzanego)
Wyposażenie stanowiska pracy:
–
kilka modeli przekładni zębatych.
Ćwiczenie 3
Zbadaj przekładnię falową przedstawioną na rysunku do ćwiczenia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać oględzin eksponatu przekładni falowej,
2) przeanalizować pracę przekładni poprzez obracanie osią napędową i obserwację osi
napędzanej,
3) wykonać pomiary kąta obrotu wału napędzanego w zależności od ilości obrotów wału
napędzającego,
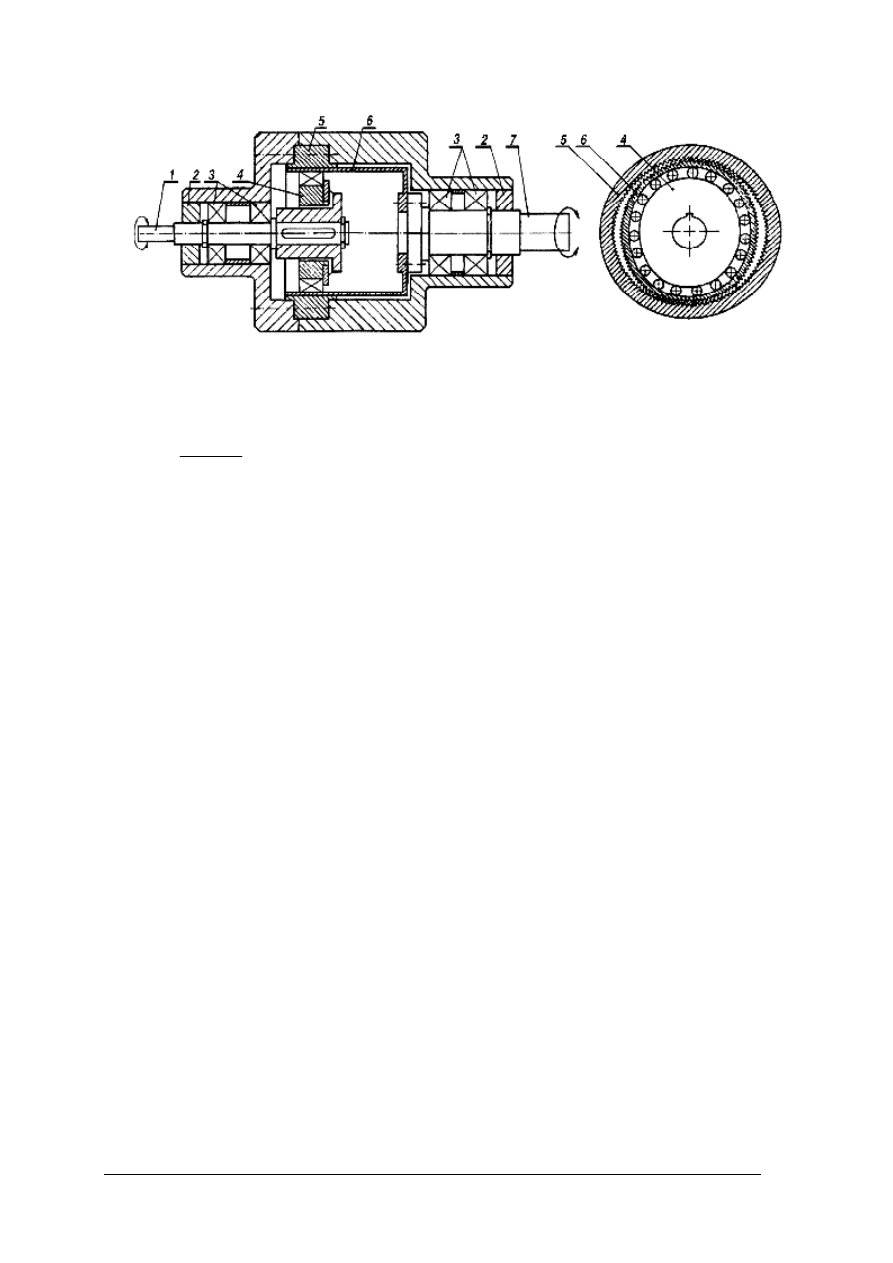
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
72
Rysunek do ćwiczenia 3. Badana przekładnia falowa: wał wejściowy (napędzany), 2–pierścień uszczelniający,
3–łożyska, 4–generator fali, 5–nieruchome koło uzębione wewnętrznie, 6–wieniec sprężysty uzębiony
zewnętrznie, 7–wał wyjściowy (napędzany). [źródło własne]
4) obliczyć przełożenie przekładni zgodnie z następującą zależnością:
°
⋅
α
=
360
n
i
1
gdzie:
α
–kąt obrotu wału wyjściowego w stopniach,
n
1
– ilość obrotów wału napędzającego dla danego kąta,
5) powtórzyć pomiary dla kilku różnych ilości obrotów wału napędzającego.
Wyposażenie stanowiska pracy:
–
przekładnia falowa,
–
kątomierz z poziomnicą.
4.7.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
scharakteryzować przekładnie mechaniczną i jej parametry?
2)
scharakteryzować rodzaje i działanie przekładni pasowych?
3)
scharakteryzować budowę i działanie przekładni łańcuchowej?
4)
scharakteryzować budowę i działanie przekładni ciernej?
5)
scharakteryzować budowę przekładni zębatej i podać ich podział?
6)
scharakteryzować działanie przekładni zębatej o zmiennym przełożeniu?
7)
scharakteryzować budowę i działanie przekładni falowej?
8)
sprawdzić działania przekładni falowej?
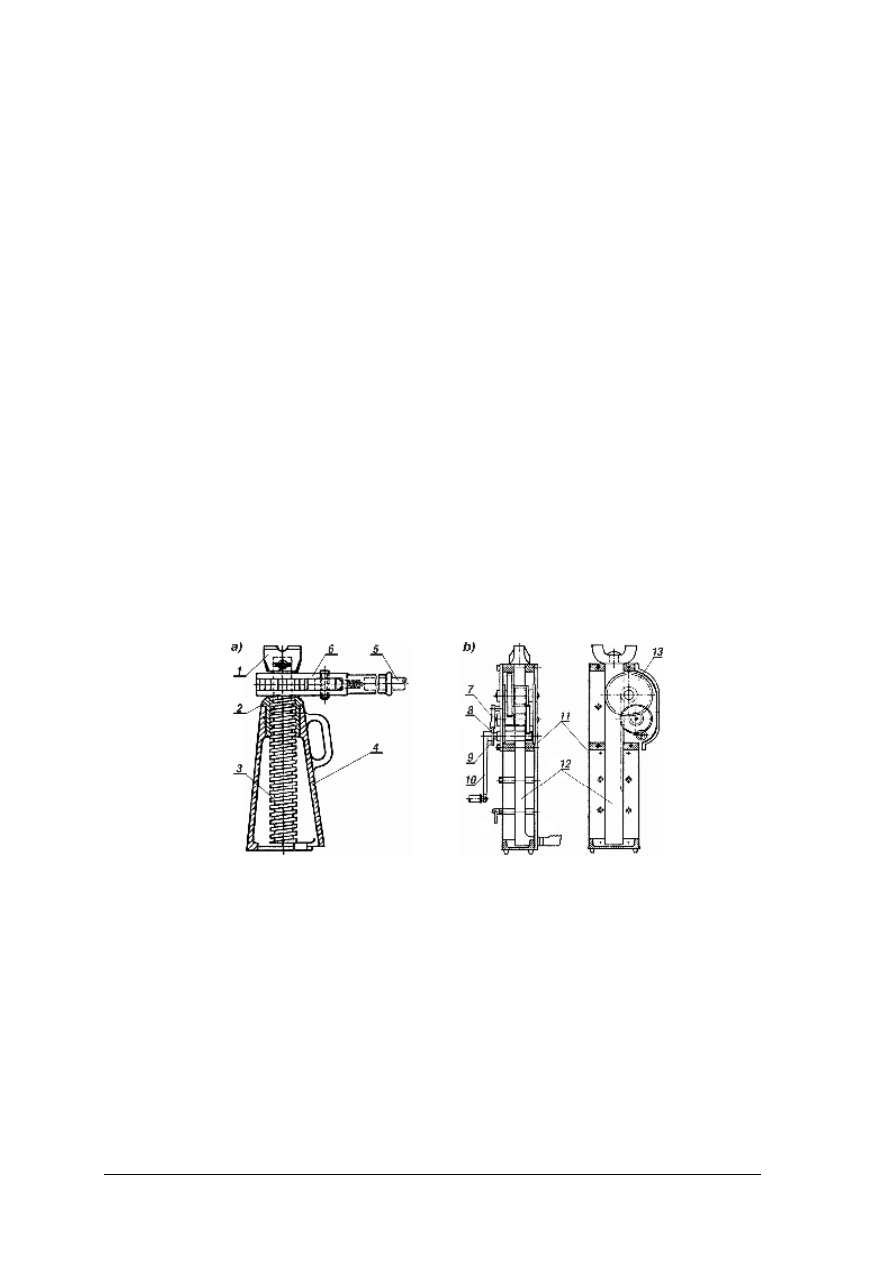
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
73
4.8. Dźwignice i przenośniki
4.8.1. Materiał nauczania
Ludzie, towary, inne przedmioty, maszyny, urządzenia, muszą być przemieszczane
Transport jest zespołem czynności związanych z przenoszeniem materiałów lub osób. W tym
rozdziale tylko opisany będzie transport materiałów. Maszyny i urządzenia transportowe
muszą być przystosowane do przenoszenia: ciał stałych, (np. rury, pompy, cysterny), gazów
(np. rury, wentylatory, pompy, cysterny). Przemieszczanie wykonują środki transportowe.
Środki do transportu ciał stałych podzielić można na: nośniki do transportu dalekiego
(drogowego, kolejowego, wodnego, lotniczego) oraz na środki do transportu bliskiego
(dźwignice, przenośniki).
Dźwignice służą do przenoszenia na niewielkie odległości ciężarów o różnej masie
i różnej postaci. Pracują one ruchem przerywanym, tzn. jest etap ruchu, podczas którego
przenoszoną materiał – jest to etap roboczy – a ruch powrotny jest najczęściej etapem
jałowym, podczas którego nie jest przenoszone nosiwo. Dźwignice dzielą się na: podnośniki
(dźwigniki, cięgniki, wózki, dźwigniki i cięgniki przejezdne), suwnice, wspornice, żurawie.
Dźwigniki są to podnośniki, które unoszą obiekt pionowo lub w kierunku zbliżonym do
pionowego. Jednym z najprostszych jest dźwignik śrubowy (rys. 71a), który napędzany jest
dźwignią ręczną (5). Śruba podnosząca (3) ma gwint trapezowy (ma on większą
wytrzymałość mechaniczną niż inne) i jest obracana dźwignią za pomocą dwustronnego
mechanizmu zapadkowego (6) – tzw. „grzechotki”. Śruba obracając się w gwintowanym
otworze tulei, podnosząc się (lub obniżając) podnosi tzw. „koronę”, która unosi spoczywający
na niej przedmiot (nosiwo). Dźwigniki takie mają udźwig do ok. 25 t, a wysokość
podnoszenia do 40cm (sprawność: ok. 30÷40%).
Rys. 71. Dźwignik: a) śrubowy, b) zębatkowy: 1 – korona, 2 – tuleja gwintowana, 3 – śruba
z gwintem trapezowym, 4 – korpus, 5 – dźwignia, 6 – dwustronny mechanizm
zapadkowy, 7 – zapadka, 8 – koło zapadkowe, 9 – wałek korby, 10 – korba ręczna,
11 – kadłub, 12 – zębatka, 13 – przekładnia zębata [16, s. 393]
Dźwignik zębatkowy (rys. 71b) napędzany jest ręczną korbą (10). Przedmiot podnoszony
spoczywa na podpórce przytwierdzonej do zębatki (12), która przesuwana jest pionowo za
pomocą trzystopniowej przekładni zębatej (13). Przed opadaniem zębatki zabezpiecza ją
zapadka (7) i koło zapadkowe (8) znajdujące się na wale korby (9). Udźwig takich
dźwigników wynosi od 1 do 20t, przy sprawności ok. 70% i wysokości podnoszenia do 40
cm. Dźwigniki hydrauliczne podnoszą ciężary za pomocą tłoka poruszanego ciśnieniem
wywieranym przez olej tłoczony pompą ręczną (rys. 72) lub pompą napędzaną elektrycznie.
Udźwig jego wynosi w granicach od 20 do 500 t. Przy małych udźwigach mają napęd ręczny
(dźwignią 6), a przy wyższych są często napędzane elektrycznie. Wysokość podnoszenia –
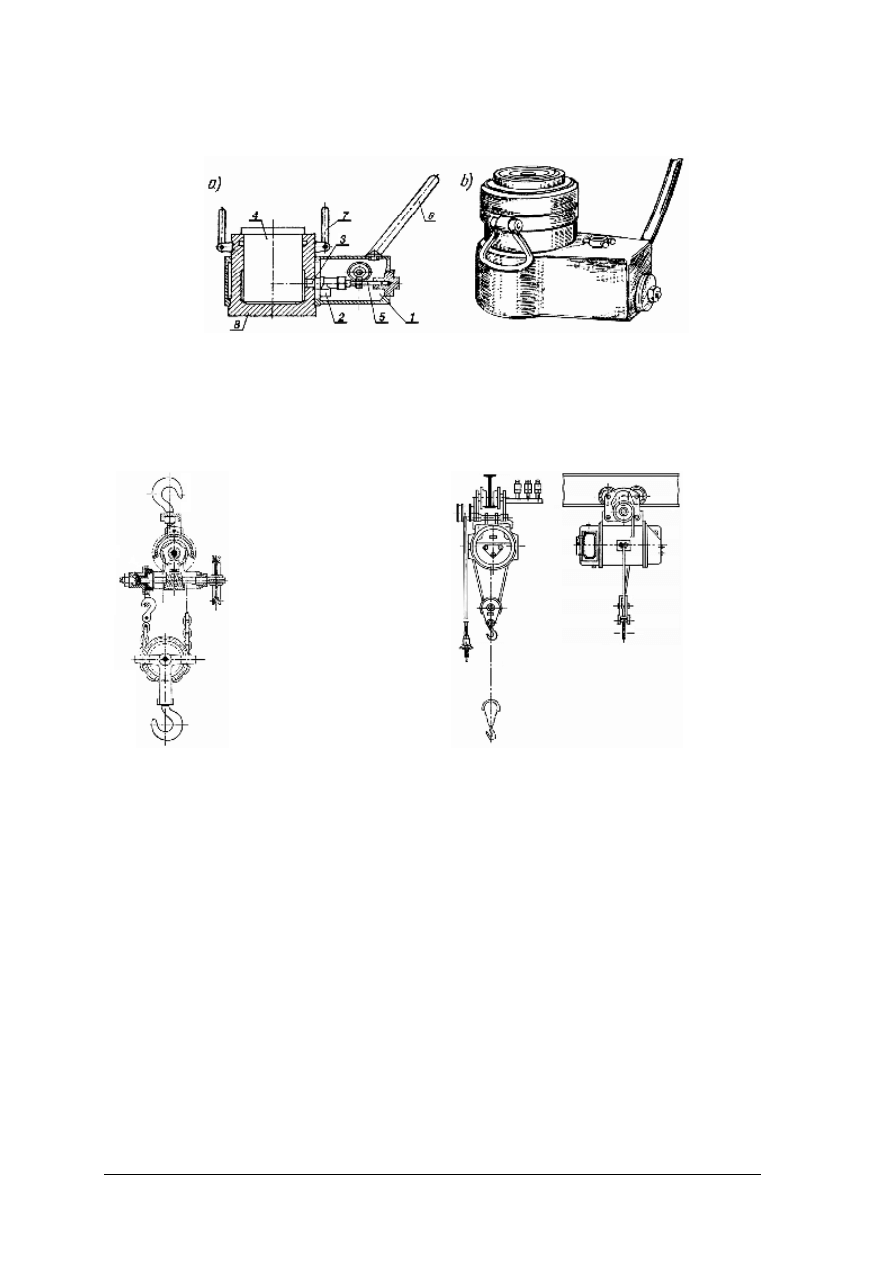
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
74
0,2÷1,6m (do 2,7m z tłokiem teleskopowym). Ma on dość duży udźwig w stosunku do swoich
gabarytów i ciężaru.
Rys. 72. Dźwignik hydrauliczny: a) przekrój, b) widok ogólny: 1 – zbiornik oleju, 2 – zawór
dolotowy, 3 – zawór wylotowy, 4 – tłok roboczy, 5 – tłoczek pompy, 6 – dźwignia
ręczna, 7 – uchwyty (ucha), 8 – kadłub cylindra [16, s. 394]
Cięgnik jest to podnośnik, który za pomocą cięgna (liny lub łańcucha) oraz zaczepu
(haka, chwytaka, podchwytu itp.) ciągną ciężar w określonym kierunku – najczęściej
pionowo, ale niekoniecznie.
Rys. 73. Wyciągnik ślimakowy [16, s. 394].
Rys. 74. Wózek podwieszony z wciągnikiem
elektrycznym [16, s. 397].
Jednym z cięgników jest, wyciągnik ślimakowy (rys. 73). Wykorzystano przekładnię
ślimakową napędzającą wał, na którym zamocowany jest bęben do nawijania na nim cięgna.
Cięgnem w tym przypadku jest łańcuch, którego jeden koniec zamocowany jest hakiem do
obudowy wyciągnika, a drugi koniec nawijany jest na bęben. Wał ze ślimacznicą napędzany
jest przez koło łańcuchowe znajdujące się na nim, które obracane jest ręcznie opasującym je
łańcuchem. Hak z krążkiem łańcuchowym spoczywa w zagięciu łańcucha (cięgna). Podczas
obracania napędowego koła łańcuchowego obraca ono bębnem (za pośrednictwem przekładni
ślimakowej). Łańcuch nawijany jest wtedy na bęben, cięgno skraca się, więc krążek
łańcuchowy haka podciągany jest do góry, a z nim cały hak. Przy obracaniu koła napędowego
w przeciwną stronę łańcuch jest odwijany, cięgno wydłuża się i hak opuszcza się. Udźwig
takiego cięgnika wynosi ok. 0,5–10t, a wysokość podnoszenia od 3–10m, (sprawność 60–
70%). Innymi cięgnikami mogą być stosowane czasami tzw. „ręczne wyciągarki
przyścienne”, które wykonywane są w wersji z przekładnią ślimakową albo z wielostopniową
przekładnią czołową.
Wózki służą do przenoszenia nosiwa w płaszczyźnie poziomej, a także pomocniczo
(w koniecznym zakresie) – w pionie. Wózki najczęściej zawieszane są na jednej szynie, po
której poruszają się jeżdżąc przesuwane ręcznie (lub elektrycznie). Część wyciągnika
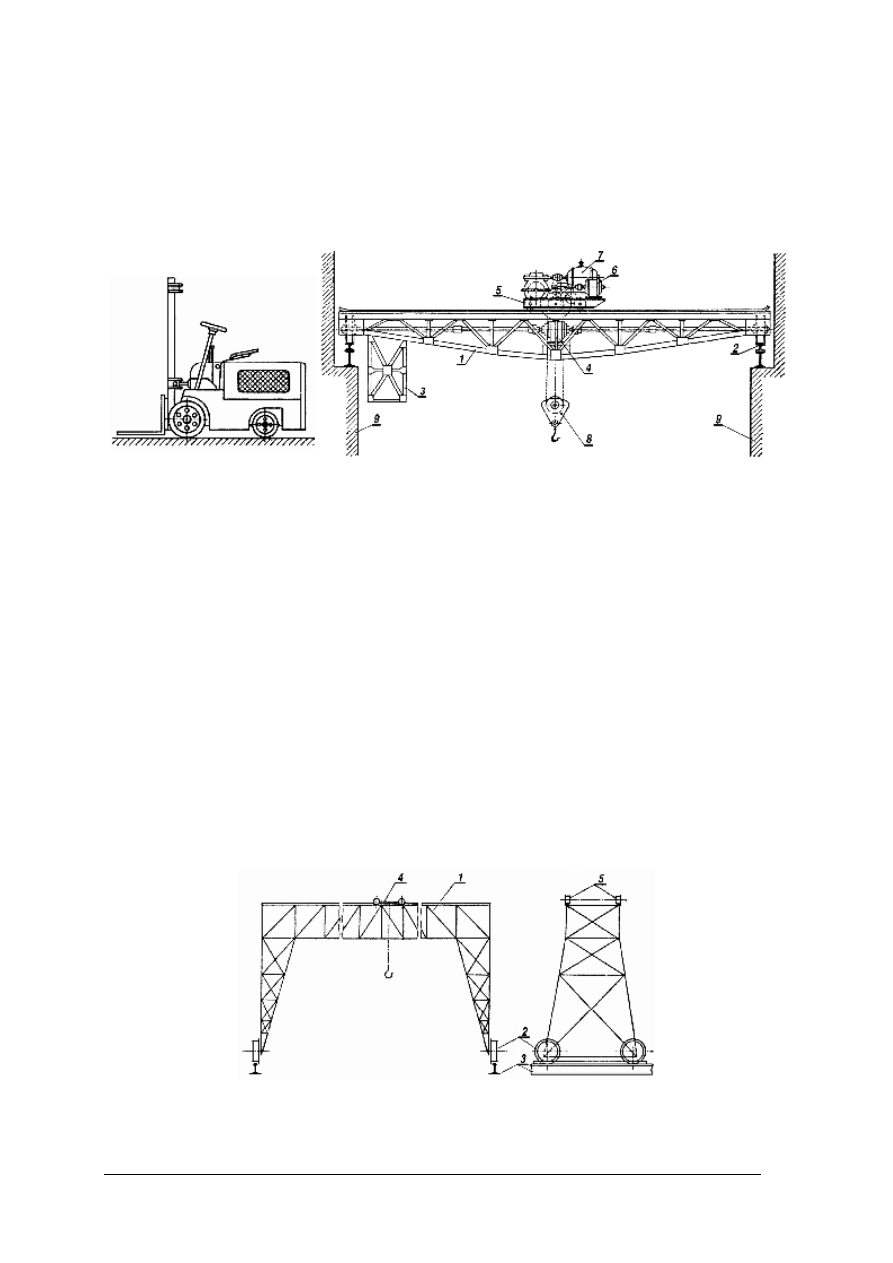
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
75
(podnosząca ciężar do góry) może mieć napęd ręczny lub elektryczny. Przykład wózka,
o udźwigu do 5 t z przesuwaniem ręcznym i z wciągnikiem elektrycznym przedstawia rys. 74.
Jego działanie jest podobne do poprzedniego wyciągnika, tylko cięgnem jest lina, a bęben
napędzany jest silnikiem elektrycznym poprzez przekładnię zębatą.
Jako dźwigniki stosowane są też często przejezdne dźwigniki podnośnikowe nazywane
wózkami widłowymi. Występują one w dwóch wersjach: z napędem akumulatorowym lub
z napędem spalinowym – przykład dźwignika elektrycznego zamieszczony jest na rys. 75.
Rys. 75. Przejezdny dźwignik
podnośnikowy (wózek
akumulatorowy) [16, s.
397]
Rys. 76. Suwnica warsztatowa z jednym wózkiem: 1 – most kratownicowy,
2 – szyny jazdy suwnicy, 3 – kabina operatora, 4 – silnik jazdy
suwnicy, 5 – wózek wciągarki, 6 – silnik jazdy wózka, 7 – silnik
wciągarki, 8 – zblocze z hakiem, 9 – ściany budynku [16, s. 411]
W warsztatach, zakładach produkcyjnych, składnicach przeładunkowych potrzebne są do
przenoszenia ciężkich materiałów i produktów suwnice. Jest to dźwignica wyposażona
w most, w mechanizm podnoszenia i opuszczania, czyli wciągarkę lub wciągnik,
przeznaczona do przemieszczania materiałów i ludzi w pionie i w poziomie, w przestrzeni
ograniczonej długością toru jazdy, wysokością podnoszenia oraz szerokością mostu. Rys. 76
przedstawia przykład suwnicy. Suwnica jest urządzeniem o złożonej budowie mechanicznej,
a jednocześnie musi być niezawodna i bezpieczna (uwzględniając masy transportowanych
materiałów). Udźwig suwnic jest najczęściej dość znaczny. Może on wynosić od 250 kg (dla
najmniejszych) do 50 t, a nawet w specjalnych zastosowaniach 400–500 t. Rozpiętość mostu
suwnicy w typowych warunkach może wynosić od kilku do kilkunastu metrów
(w specjalnych wykonaniach może być to nawet 30 m a nawet więcej). Elementy suwnicy
wykonują trzy ruchy: pierwszy to podnoszenie i opuszczanie nosiwa, drugi to poziome
przesuwanie się wózka suwnicy po jej moście, a trzeci, to poziome przesuwanie się całego
mostu po szynach wzdłuż hali produkcyjnej.
Rys. 77. Bramowa suwnica kratownicowa jeżdżącą torowiskiem: 1 – most, 2 – koła jezdne suwnicy,
3 – tor jazdy suwnicy, 4 – wózek z wciągarką, 5 – koła jezdne wózka [16, s. 413]
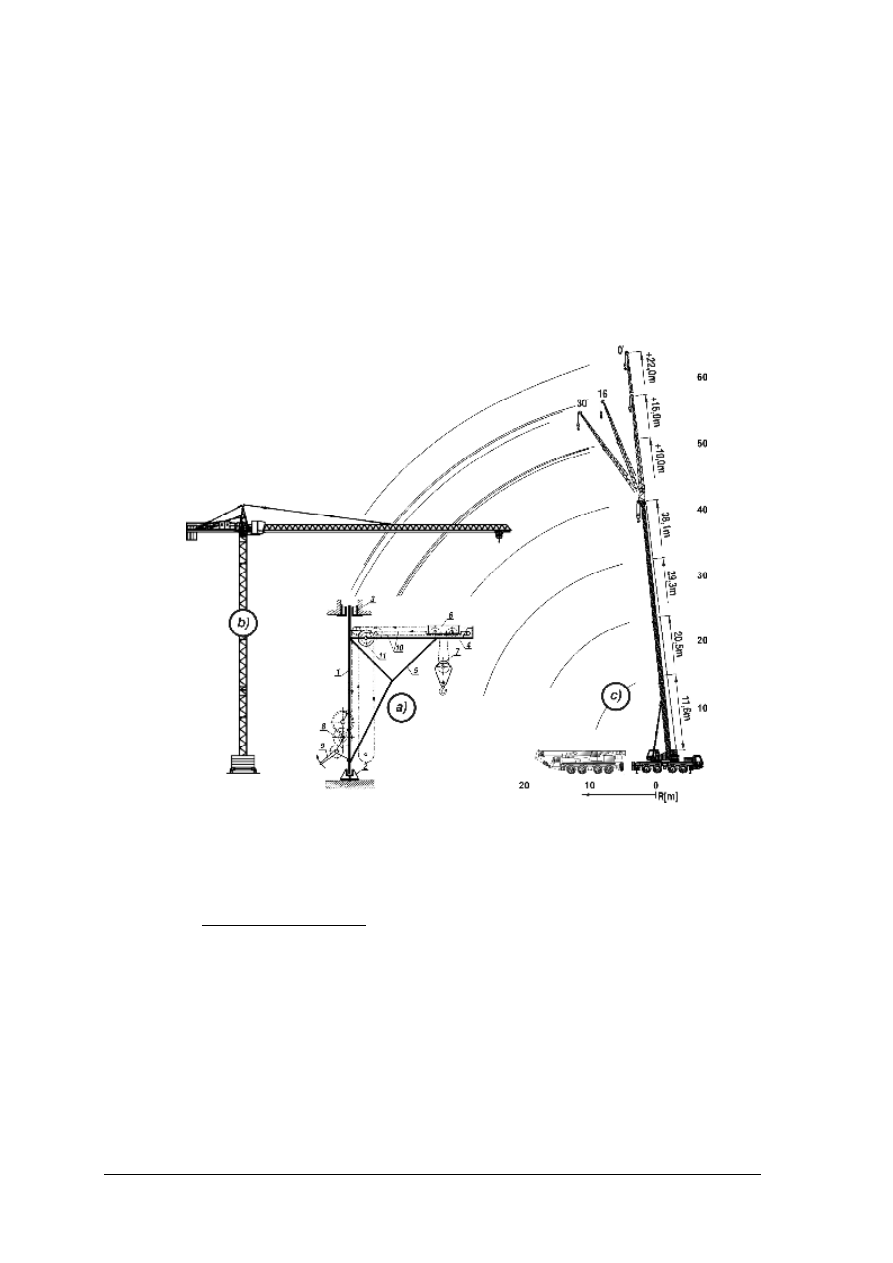
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
76
Suwnice mogą być wykonywane również jako maszyny poruszające się po szynach
ułożonych na powierzchni ziemi. Wtedy suwnica taka może być suwnicą bramową pokazaną
na rys. 77. Za wykonywanie każdego z trzech ruchów suwnicy odpowiada inny układ
napędowy. Istnieją suwnice samojezdne, które poruszają się podobnie jak pojazdy
samochodowe na ogumionych kołach i zmieniające kierunek podczas jazdy. Konstrukcja
takich maszyn jest jeszcze bardziej skomplikowana.
Żuraw (najczęściej nazywany dźwigiem) jest dźwignicą, działającą obrotowo (dookoła
pionowej osi) w przestrzeni walca ograniczonego maksymalną wysokością podnoszenia oraz
promieniem podstawy, którym jest wysięg. Żurawie mają napęd ręczny, elektryczny,
spalinowy. Jest ich wiele rodzajów żurawi przystosowanych do warunków, w jakich muszą
pracować. Są żurawie stacjonarne, przenośne, przewoźne, pokładowe i samojezdne.
Rys. 78.
Żurawie: a) przyścienny o ręcznym napędzie (jest w innej skali niż dwa
pozostałe): 1 – słup, 2 – łożysko dolne, 3 – łożysko górne, 4 – wysięgnica,
5 – zastrzał, 6 – wózek, 7 – zblocze, 8 – wciągarka, 9 – korba, 10 – łańcuch
przesuwu wózka, 11 – mechanizm jazdy wózka, b) wieżowy stacjonarny
(wys. wieży 37m), c) samochodowy teleskopowy w stanie do transportu
i do pracy (max. wys. udźwigu 60m) [opracowanie własne na podstawie
www.groveworldwide.com]
Każdy żuraw składa się z kolumny i wysięgnika. Obecnie stosowane są głównie żurawie
wieżowe stacjonarne (lub poruszające się na niewielkie odległości po torowisku), żurawie
samochodowe (teleskopowe i kratownicowe) oraz inne mniejsze. Jednym z prostszych jest
żuraw przyścienny o ręcznym napędzie (rys. 78a). Jest on mocowany do ściany lub sufitu
(belki). Udźwig takiego żurawia nie jest duży (od kilkuset kg do ok. 10 t). Na budowach
wysokich budynków stosowane są żurawie wieżowe (kratownicowe) – rys. 78b. Kiedyś były
to żurawie jeżdżące po specjalnych torowiskach, ale dzisiejsze żurawiach o wysokościach
wież do ok. 60m i długości wysięgnika do 70 m są raczej stacjonarnymi. Podczas budowy
bardzo wysokich budynków (300÷500 m i więcej) stosowane są żurawie o wysokości np.
30 m, które montowane są najpierw na ziemi, później w miarę postępów budowy wieżowca,
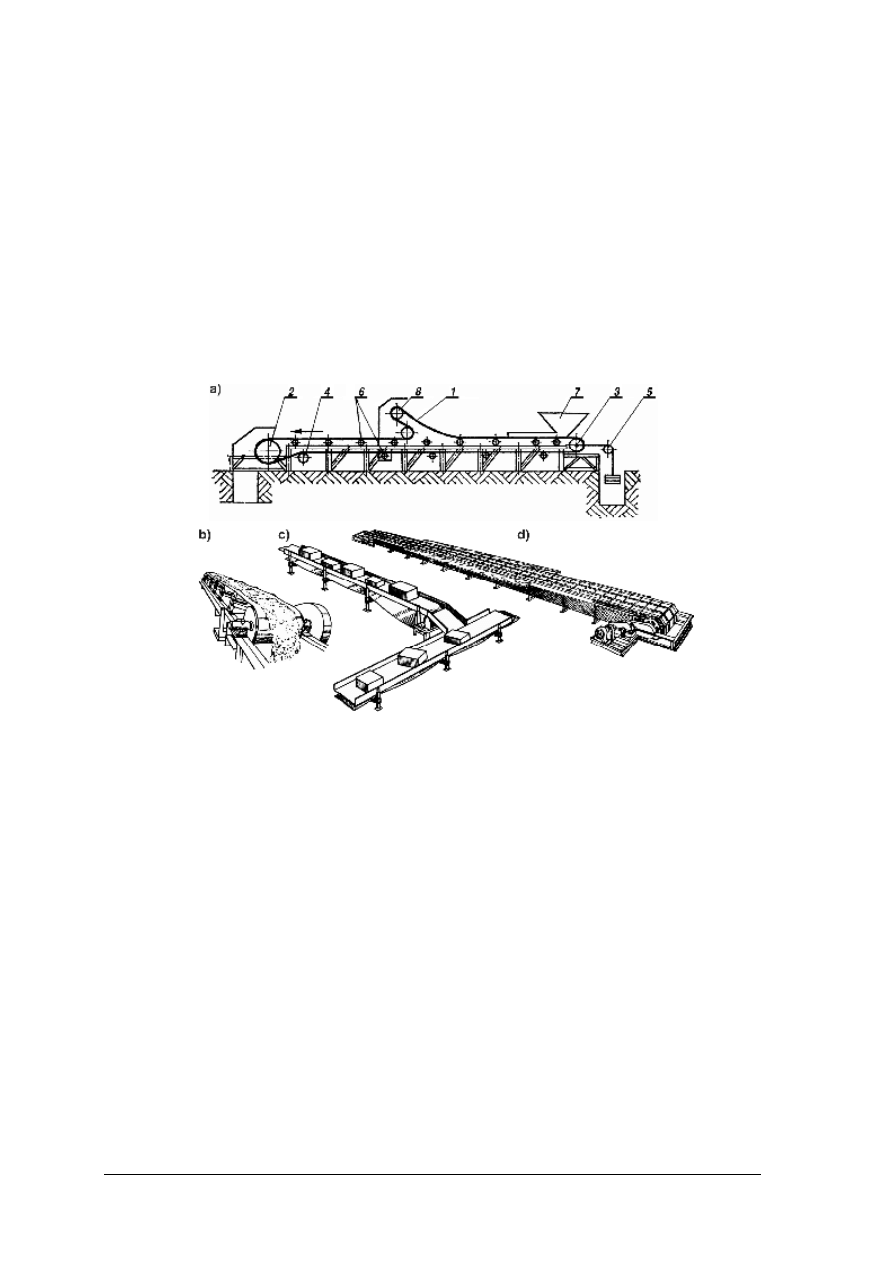
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
77
na jego szczycie budowana jest specjalna platforma i dźwig przenoszony jest na nią. Stoi on
wtedy na budynku, a wokół niego budowana jest dalsza część drapacza chmur – później jest
on przenoszony wyżej itd. Do podnoszenia ciężarów w terenie stosowane są dźwigi
samochodowe. Mają kolumnę zredukowaną do obrotowej podstawy żurawia, a wysięgnik
najczęściej jest teleskopowy, a ostatnie segmenty wysięgnika mogą być kratownicowe.
Żurawie produkowane są na różnych podwoziach wielokołowych (8, 16 i więcej kół), mają
możliwość podnoszenia do ok. 80 m, a z wykorzystaniem dodatkowego przedłużającego
wysięgnika kratownicowego do ponad 110 m (rys. 78c).
Przenośnik cięgnowy to urządzenie do transportowania materiałów na bliskie odległości,
pracujące w sposób ciągły (bez jałowego ruchu powrotnego). Przenośniki przenoszą
w określonym kierunku strumień materiałów. Należą do jednej z czterech grup: cięgnowe,
bezcięgnowe, pneumatyczne i hydrauliczne. Przenośniki cięgnowe dzielą się na bezczłonowe,
członowe i ciśnieniowe. Do bezczłonowych zalicza się: taśmowe, linowe i łańcuchowe.
Rys. 79. Przenośnik cięgnowy a) schemat budowy taśmowego płaskiego: 1 – taśma, 2 – bęben napędowy,
3 – bęben napinający, 4 – bęben kierujący, 5 – mechanizm napinający, 6 – wałki podtrzymujące
taśmę, 7 – kosz zsypowy, 8 – wózek zrzutowy, b) taśmowy korytkowy, c) taśmowy płaski,
d) płytkowy [16, s. 275–282]
Ogólna budowa przenośnika cięgnowego płaskiego przedstawiona jest na rys. 79a. Do
transportu materiałów sypkich (ziemia, ruda, węgiel itp.) stosowane są przenośniki korytkowe
(taśma na środku jest zagłębiona tworząc na swojej długości przesuwające się koryto)
(rys. 79b). Do tej samej grupy zalicza się jeszcze przenośniki rurowe. Dużą grupę stanowią
przenośniki członowe, do których wchodzą: płytowe (rys. 79d), schodkowe, kubełkowe,
kieszeniowe, półkowe, kołyskowe, wózkowe, wałkowe i zabierakowe (zaczepowe
i zgarniakowe). Przenośnikiem cięgnowym jest też przenośnik wózkowy podwieszony
(rys. 80), w którym wózki jeżdżą po szynie (połączone ze sobą łańcuchem), która może
przebiegać również pod kątem do podłoża. Do wózków podwieszone mogą być wieszaki
dostosowane do różnych materiałów, które mają być transportowane.
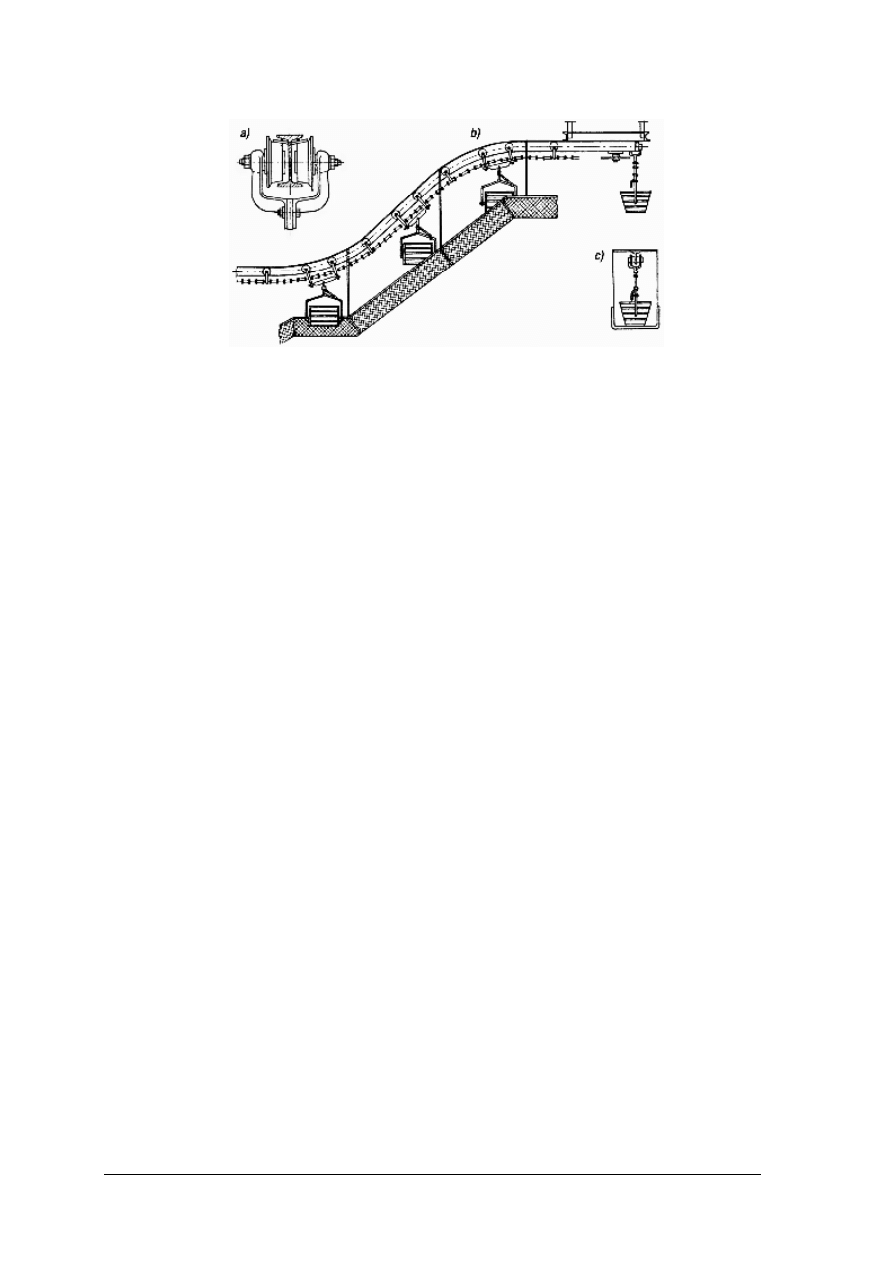
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
78
Rys. 80. Przenośnik podwieszony: a) zawieszenia wózka na szynie, b) fragment toru
przenośnika, c) osłony wózków toru [16, s. 286]
4.8.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to są dźwignice i jaka jest ich klasyfikacja?
2. Jak jest budowa dźwigników?
3. Jak działają podstawowe rodzaje dźwigników?
4. Jakie znasz rodzaje ciągników?
5. Jak działa suwnica?
6. Jak jest zbudowany żuraw?.
7. Jak działa przenośnik cięgnowy?
8. Jakie jest zastosowanie przenośników cięgnowych?
4.8.3. Ćwiczenia
Ćwiczenie 1
Sprawdź działanie dźwignika śrubowego i zębatkowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wstawić dźwignik śrubowy pod pojazd i podnieść na wysokość 30 cm w górę,
2) opuścić pojazd do położenia spoczynkowego,
3) wstawić pod pojazd dźwignik zębaty i podnieść na wysokość 30 cm
,
4) porównać czas i prostotę użycia obu dźwigników.
Wyposażenie stanowiska pracy:
–
pojazd do podnoszenia (może być np. samochód osobowy),
–
miara do mierzenia wysokości,
–
dźwigniki: śrubowy i zębatkowy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
79
Ćwiczenie 2
Określ rodzaje i parametry aktualnie dostępnych suwnic lub dźwigów w Polsce.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) uruchomić komputer, zalogować się do systemu i do Internetu,
2) wyszukać w Internecie strony na których przedstawiona jest oferta poszukiwanego
sprzętu.
3) porównać parametry takie jak udźwig, wysokość podnoszenia (dla żurawi), promień
pracy wysięgnika.
Wyposażenie stanowiska pracy:
–
komputer typu IBM–PC z zainstalowanym oprogramowaniem systemowym,
przeglądarkami internetowymi, plików „*.pdf”, graficznych itp.
Ćwiczenie 3
Sprawdź działanie żurawia wieżowego i sposób sterowania nim.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) uruchomić model żurawia wieżowego,
2) obrócić wysięgnik żurawia nad podnoszony ciężar i opuścić zblocze z hakiem,
3) zaczepić zawiesia na hak zblocza, podnieść przedmiot do góry,
4) obrócić żuraw o odpowiedni kąt, przesunąć wózek na wysięgniku i opuścić przedmiot
w określone miejsce.
Wyposażenie stanowiska pracy:
–
działający zdalnie sterowany model (symulator) żurawia wieżowego (o budowie zgodnej
z rys. 79b w Poradniku dla ucznia),
–
przedmioty do przenoszenia.
4.8.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wymienić urządzenia stosowane do transportu towarów
na bliskie odległości?
2)
scharakteryzować budowę i działanie dźwigników?
3)
przedstawić budowę i działanie dźwigników?
4)
scharakteryzować rodzaje i ogólną budowę wózków
i dźwigników przejezdnych?
5)
scharakteryzować budowę suwnicy i jej działanie?
6)
wymienić rodzaje żurawi stosowanych w różnych
dziedzinach gospodarki?
7)
wymienić rodzaje przenośników stosowanych w różnych
gałęziach przemysłu?
8)
scharakteryzować ogólną budowę i działanie wybranych
przenośników?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
80
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak „X”. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem,
a następnie ponownie zakreślić odpowiedź prawidłową.
5. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawdziwa.
6. Pracuj samodzielnie, gdyż tylko wówczas będziesz miał satysfakcję z wykonanego
zadania.
7. Jeśli udzielanie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny.
8. Na rozwiązanie testu masz 25 minut.
Powodzenia!

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
81
ZESTAW ZADAŃ TESTOWYCH
1. Woltomierz służy do pomiaru
a) natężenia prądu.
b) napięcia.
c) mocy.
d) częstotliwości.
2. Manometr jest przyrządem przeznaczonym do pomiaru
a) stopnia wydłużenia cięgien.
b) przesunięcia fazowego.
c) wysokości słupa tłoczonej wody.
d) ciśnienia.
3. Rejestrator służy do
a) zapisu mierzonych wartości.
b) regulacji ilości pobieranej wody.
c) rejestrowania sprzedanych towarów.
d) utrzymywania zarejestrowanej stałej temperatury w centralnym ogrzewaniu.
4. Ploter to urządzenie, które
a) jest popularnym gadżetem, bez sensownego zastosowania.
b) utrzymuje stałe ciśnienie w zbiorniku wyrównawczym.
c) ploteruje utwardzaną powierzchnię metali szlachetnych.
d) wykreśla rysunki techniczne.
5. Łożysko nożowe
a) jest nowoczesnym sposobem zawieszenia szybkoobrotowych wałów korbowych.
b) ma duże znaczenie w zasadzie działania silnika Wankla.
c) powoduje obniżenie zużycia paliwa w cyklu jazdy miejskiej.
d) jest sposobem zawieszenia elementów ruchomych wagi laboratoryjnej.
6. Sprężarka w chłodziarce zastosowana jest w celu
a) chłodzenia parownika strumieniem sprężonego powietrza.
b) zamiany freonu ze stanu gazowego w stan ciekły.
c) odsysania powietrza z chłodzonej komory.
d) naprawdę nie ma jej w żadnej chłodziarce.
7. Przekładnia pasowa
a) może przyspieszać ruch obrotowy,
b) w dobie silników krokowych nie znajduje zastosowania.
c) przy zerwaniu pasa może dalej napędzać wał wyjściowy.
d) zawsze jest reduktorem.
8. Cewka w mierniku analogowym
a) umożliwia obracanie stojana.
b) przewodzi prąd elektryczny i wytwarza moment napędowy w polu magnetycznym.
c) umożliwia zwarcie zacisków i pominięcie organu ruchomego.
d) umożliwia pomiar ciśnienia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
82
9. Rurka Bourdona znalazła zastosowanie
a) do pomiaru prądu.
b) do pomiaru napięcia.
c) do pomiaru masy.
d) do pomiaru ciśnienia.
10. Rejestrator ciągły
a) zapisuje pomierzone wartości tylko na taśmie magnetycznej.
b) nie może zapisywać pomiarów na tarczy.
c) prowadzi stały zapis mierzonej wartości.
d) zapisuje binarnie wykonane pomiary.
11. Ploter płaski
a) ma papier nawinięty na bębnie.
b) może być ploterem kreślącym lub tnącym.
c) nie może pisać liter.
d) drukuje tylko na folii termokurczliwej.
12. Kasa fiskalna
a) służy do kasowania biletów w środkach masowej komunikacji.
b) jest urządzeniem w pełni mechanicznym.
c) służy do rejestracji wszystkich operacji finansowych wykonywanych podczas
sprzedaży detalicznej.
d) nie może współpracować z drukarką.
13. W przekładni ślimakowej
a) wał napędowy obraca się zawsze szybciej od napędzanego.
b) wał napędowy obraca się zawsze z tą samą prędkością co napędzany.
c) prędkość wału napędowego zależy od ilości zębów koła napędzanego.
d) wał napędowy obraca się zawsze wolniej od napędzanego.
14. Dźwignik hydrauliczny
a) ma nieduży udźwig.
b) ma pompę próżniową.
c) może podnosić duże masy, przy niedużym wysiłku obsługującego.
d) ze względu na przestarzała konstrukcję nie znajduje już zastosowania.
15. Przenośnik
a) wózkowy, to samo co żuraw portowy.
b) korytkowy służy do transportu wody luzem.
c) może składać się nawet z kilkunastu korytek.
d) może mieć przesuwającą się taśmę z zagłębieniem wzdłużnym.
16. Przekładnia falowa tworzy
a) tzw. „falę” napędzającą wał wyjściowy.
b) duże prędkości obrotowe na wale wyjściowym.
c) fale rozchodzące się promieniście w przestrzeni sferycznej.
d) drgania o dużej częstotliwości.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
83
17. Falowód jest elementem
a) tłumiącym pasożytnicze drgania w pralce automatycznej.
b) przewodem doprowadzającym wodę do zmywarki.
c) elementem wytwarzającym falę uderzeniową.
d) przesyłającym mikrofale z magnetronu do promiennika.
18. W wadze elektronicznej
a) dokonuje się pomiaru prądu elektrycznego poprzez zliczanie elektronów licznikami
rewersyjnymi.
b) do
pomiaru
masy
wykorzystuje
nieznaczne
odkształcenia
czujników
tensometrycznych.
c) zbudowana jest z elementów ceramicznych odpornych na wysoką temperaturę.
d) podczas pomiaru masy generuje mikrofale wysokiej częstotliwości zwane
promieniowaniem przenikliwym.
19. Jako plotery obecnie wykorzystuje się najczęściej
a) obrabiarki sterowane numerycznie (tzw. CNC).
b) atramentowe drukarki wielkoformatowe.
c) urządzenia z mikrofrezarkami szybkoobrotowymi.
d) przyrządy do fotolitografii.
20. Manometr podłączony do instalacji przez bezpiecznik:
a) zapewnia oddzielenie manometru od żrących oparów.
b) zabezpiecza przed nadmiernym ciśnieniem.
c) pozwala na mierzenie ciśnienia w metalach szlachetnych bez ich zanieczyszczania.
d) pozawala na dopasowanie przewodów o różnych średnicach wewnętrznych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
84
KARTA ODPOWIEDZI
Imię i nazwisko: ...................................................................................................................
Określanie konstrukcji wybranych urządzeń precyzyjnych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
85
6. LITERATURA
1. Dąbrowski A.: Konstrukcja przyrządów precyzyjnych. WSiP, Warszawa 2000
2. Fabiański P., Wójciak A.: Praktyczna elektrotechnika ogólna. REA, Warszawa 2003
3. Jabłoński W., Płoszajski G.: Elektrotechnika z automatyką. WSiP, Warszawa 1999
4. Koludo A., Skotnicki S., Wróbel J.: Komputerowe wspomaganie projektowania. WSiP,
Warszawa 1996
5. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1998
6. Kostro J.: Podstawy automatyki. WSiP, Warszawa 1990
7. Lebson S., Kaniewski J.: Miernictwo elektroniczne dla technikum. PWSzZ,
Warszawa 1971
8. Leszczyński H.: Aparatura i urządzenia chłodnicze. WSiP, Warszawa 1980
9. Marusak A. J.: Urządzenia elektroniczne. Cz. III. Budowa i działanie urządzeń.
Podręcznik dla szkoły zasadniczej. WSiP S.A.,Warszawa 2000
10. Mała encyklopedia metrologii. WNT, Warszawa 1989
11. Mały poradnik mechanika. Tom II. WNT, Warszawa 1994
12. Ochęduszko K., Koła zębate. Tom 1. Konstrukcja. WNT, Warszawa 1985
13. Olszewski M (red.).: Mechatronika podręcznik dla uczniów szkół średnich i zawodowych
szkół technicznych. REA, Warszawa 2002
14. Rutkowski A., Orlik Zb.: Części maszyn. Cz. 2. Wydanie drugie. Podręcznik dla
technikum. WSiP, Warszawa 1985
15. Surowiak W., Dobrzański T.: Ilustrowana encyklopedia dla wszystkich – Maszyny.
WNT, Warszawa 1973
16. Załuska W.: Badanie charakterystyki cechowania manometrów i czujników ciśnień –
Ćwiczenie do zajęć laboratoryjnych. Politechnika Białostocka, Suwałki 2005
Wyszukiwarka
Podobne podstrony:
Podstawy konstruowania urządzeń precyzyjnych 09
Podstawy konstruowania urządzeń precyzyjnych 01
Podstawy konstruowania urządzeń precyzyjnych 11
Podstawy konstruowania urządzeń precyzyjnych 04
Podstawy konstruowania urządzeń precyzyjnych 03
Podstawy konstruowania urządzeń precyzyjnych 05
Podstawy konstruowania urządzeń precyzyjnych 10
Podstawy konstruowania urządzeń precyzyjnych 08
Podstawy konstruowania urządzeń precyzyjnych 09
Podstawy konstruowania urządzeń precyzyjnych 11
Podstawy konstruowania urządzeń precyzyjnych 09
Podstawy konstruowania urządzeń precyzyjnych 08
Podstawy konstruowania urządzeń precyzyjnych 05
Podstawy konstruowania urządzeń precyzyjnych 01
Podstawy konstruowania urządzeń precyzyjnych 10
Podstawy konstruowania urządzeń precyzyjnych 03
Podstawy konstruowania urządzeń precyzyjnych 04
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
08 Wykonywanie połączeń w urządzeniach precyzyjnych
więcej podobnych podstron