GROMADZENIE DANYCH
(DATA STORAGE) - wersja 1.0
Aby zobrazować działanie funkcji Gromadzenie Danych (Data Storage), symulator
robota Pc-As zawiera przygotowany i gotowy do użycia program: test.pg. Poniżej znajduje
się instruktaż „krok po kroku” jak sprawdzić jego działanie:
1. Uruchomienie programu Pc-As za pomocą pliku Launch PcAs.bat
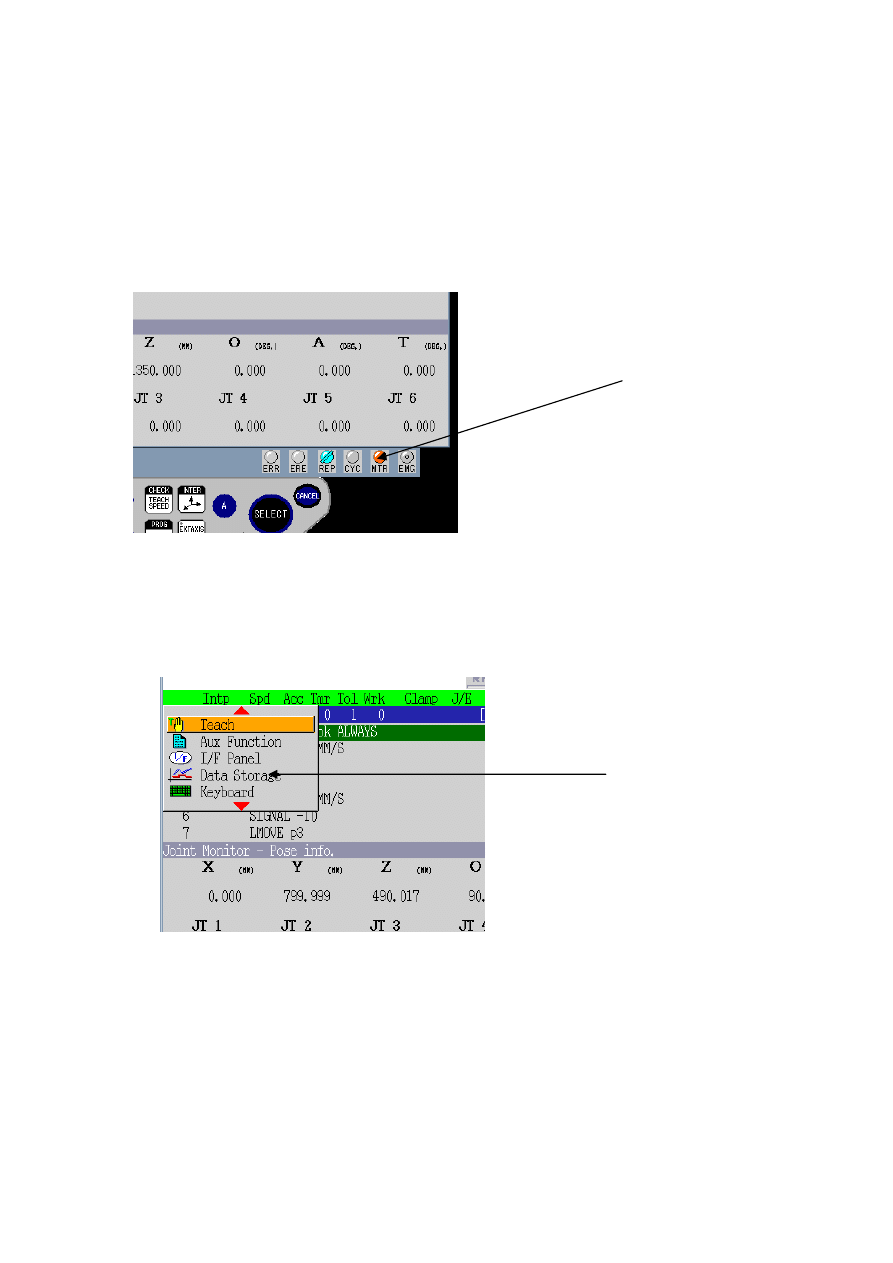
2. Włączenie zasilania silników robota – należy kliknąć na przycisk pokazany poniżej:
3. w oknie user_as wpisz komendę: do home i zatwierdź enterem.
4. Gdy pojawi się komunikat: DO motion completed, wybierz opcję Gromadzenie
Danych (Data Storage). W tym celu kliknij na przycisku MENU na klawiaturze
Ręcznego Programatora (Teach Pendanta) lub też na ekranie w okolicach miejsca
gdzie się pojawia, a nastepnie wybierz tę opcję klikając na nią myszą.
Pojawi się ekran funkcji Gromadzenia Danych.
5. Ponownie wybierając Menu na klawiaturze TP lub też klikając w ten sam obszar co
poprzednio wyświetlamy menu z którego należy wybrać: Start
6. Następnie klikamy na przycisku Start Cyklu (Cycle Start).
ASTOR Sp. z o. o. – Autoryzowany Dystrybutor Kawasaki
1
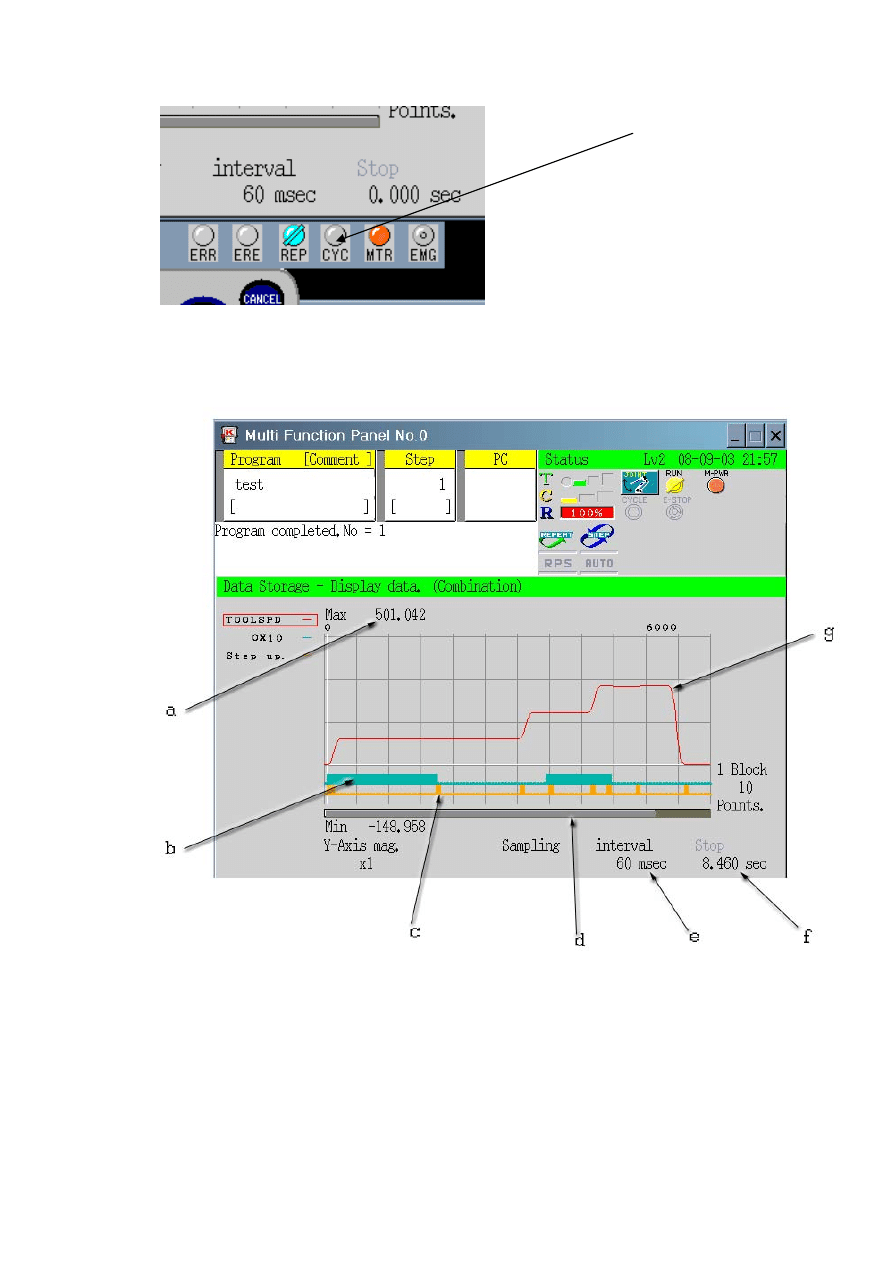
7. Nastąpi wykonanie programu test.pg i jednoczesna rejestracja wybranych parametrów:
Na ekranie poniżej opisano co oznaczają poszczególne pola.
a) Zakres osi Y wykresu
b) Przebieg sygnału na wyjściu cyfrowym nr. 10 robota
c) Sygnał wystąpienia kolejnego kroku (linii) programu
d) Suwak do przesuwania wykresu wzdłuż osi X
e) Częstotliwość próbkowania
f) Czas rejestracji
g) Prędkość narzędzie (środka układu narzędzia) w mm/s.
ASTOR Sp. z o. o. – Autoryzowany Dystrybutor Kawasaki
2

ASTOR Sp. z o. o. – Autoryzowany Dystrybutor Kawasaki
3
Zarejestrowane dane można zapisać i odczytać np. w programie EXCEL. Ponowne
wykonanie programu nastąpi po wciśnięciu CYCLE START. Aby powrócić do podglądu
parametrów pracy robota w trybie rzeczywistym, należy wybrać MENU, a następnie opcję
DELETE CUR. DATA.
Więcej na temat opcji GROMADZENIE DANYCH – DATA STORAGE można
dowiedzieć się z biuletynu automatyki nr. 57 i instrukcji obsługi. W razie pytań prosimy
o kontakt.
Program test.pg:
.PROGRAM test()
1. ACCURACY dok ALWAYS
2. SPEED 100 MM/S
3. SIGNAL 10
4. LMOVE p2
5. SPEED 200 MM/S
6. SIGNAL -10
7. LMOVE p3
8. SIGNAL 10
10. SPEED 300 MM/S
11. LMOVE p4
12. SIGNAL -10
13. SPEED 300 MM/S
14. LMOVE p1
.END
W trakcie wykonywania programu, końcówka robota przemieszcza się ruchem
liniowym od punktu p1 do kolejnych punktów: p2, p3, p4 i ponownie do p1. Punkty te
wyznaczają kwadrat o boku 300, leżący w płaszczyźnie XY bazowego układu współrzędnych.
Wyszukiwarka
Podobne podstrony:
10 Data Storage in Data Blocksid 10809 ppt
CW2006EX Mill Turn data sheet web
3 Data Plotting Using Tables to Post Process Results
PAT DS 350 Graphic Modular GM Service Data
An%20Analysis%20of%20the%20Data%20Obtained%20from%20Ventilat
Homework Data Structures
cx5500 data sheet enus
data
Data 09 Święto Niepodległości, Scenariusze i hospitacje - praktyki
auto data 2010pl 789069998 ID6c9Y
drivers data tab 1
MAXTOR DiamondMax 10, diamondmax 10 data sheet
Data 18. 03 Dorastanie zwierząt, Scenariusze i hospitacje - praktyki
08 Data exodusu w ujęciu Świadków Jehowy, Drogi prowadzace do Boga, Zestaw o SJ (www dodane pl), Zes
Data 11.03 Uczucia brzydkiego kaczątka, Scenariusze i hospitacje - praktyki
Data 02 Nazwy drzew, Scenariusze i hospitacje - praktyki
GPS Vector data(2), gik, semestr 4, satelitarna, Satka, Geodezja Satelitarna, Kozowy folder
1 3 Getting started with Data Studio Lab
więcej podobnych podstron