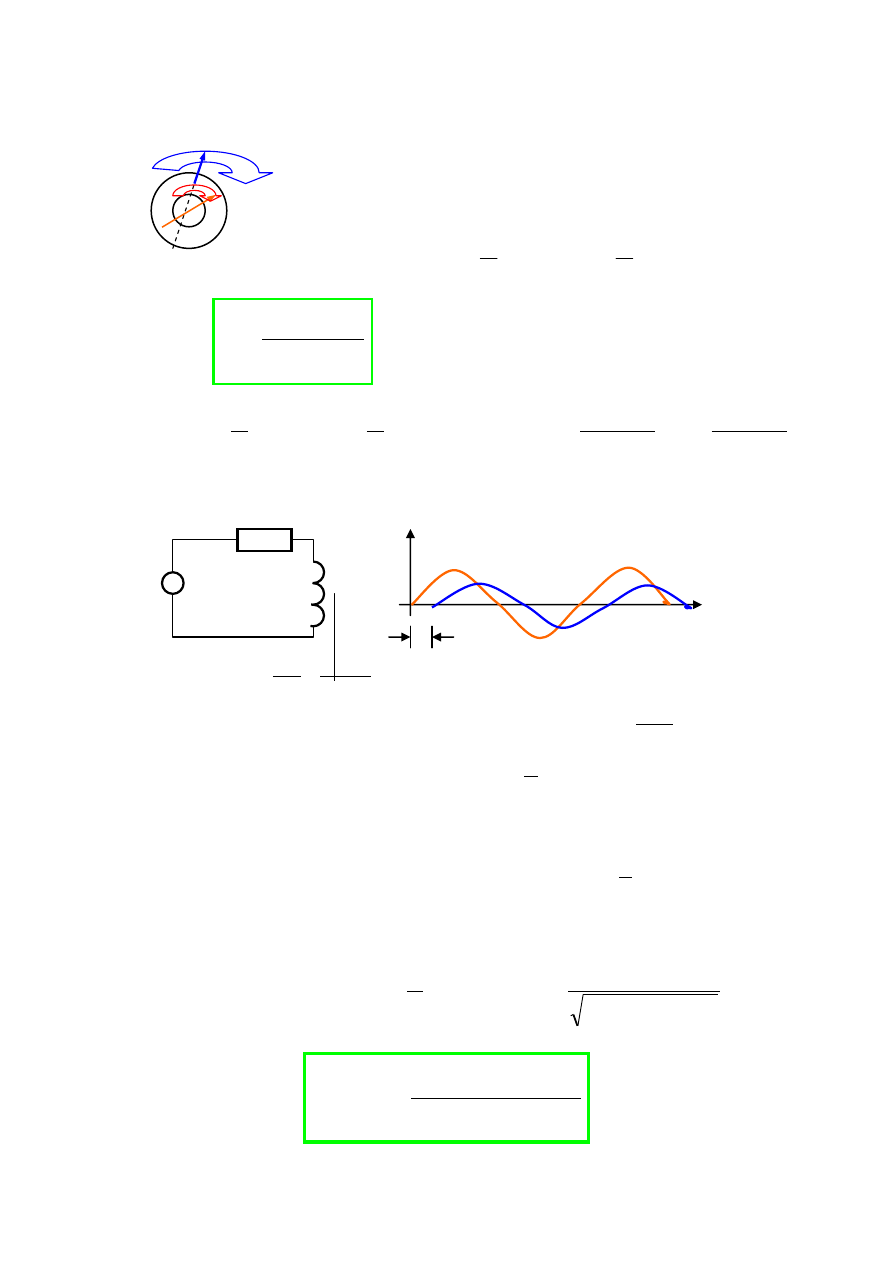
Działanie silnika indukcyjnego
W
S
em
c
M
1. Bieg synchroniczny
W
=
s
S
W
S
s
s -
poślizg
2. Bieg podsynchroniczny
W
<
s
w tworniku indukuje się zmienna sem
]
cos[
]
)
(
cos[
)
(
]
)
sin[(
)
(
)
(
max
max
max
t
s
s
z
t
z
t
dt
d
z
t
dt
d
t
e
S
S
S
S
S
W
S
S
S
W
S
S
W
S
S
W
Prąd twornika i
w
(t) jest przesunięty względem e
W
(t) o kąt
W
W
W
S
W
W
W
R
L
s
R
X
tg
W
S
em
c
M
(!)
Strumień magnetyczny wirnika
W
(t) wytwarzany jest przez
prąd wirnika a za-
tem przyjmi
jmy, że
|
)
(
|
|
)
(
|
1
t
i
c
t
W
W
zatem
zachodzi
)
2
sin(
)
cos(
)
cos(
t
s
t
s
t
s
S
W
S
W
W
S
wartość strumienia
)
sin(
)
(
3
t
U
c
t
S
S
S
a zatem pozostaje określić sin <(
S
,
W
). Strumień wirnika ślizga się względem
pola stojana z prędkością s
S
oraz jest przesunięty o kąt
W
2
. Biorąc pod
uwagę tylko wartość amplitudy moment (bez uwzględnienia składowej zmiennej
w czasie) uzyskamy
2
2
2
2
)
2
sin(
|
|
|
|
W
S
W
W
W
S
W
W
S
W
S
em
L
s
R
R
c
c
c
M
2
2
2
2
2
2
W
S
W
S
W
S
em
L
s
R
U
R
s
c
M
S
,
s
w
,
w
)
sin(
)
(
max
t
t
S
S
S
!
0
]
)
sin[(
)
(
)
(
max
t
dt
d
z
t
dt
d
t
e
W
S
S
W
~
e
W
(t) R
W
L
W
e
W
(t)
,
i
w
(t)
W
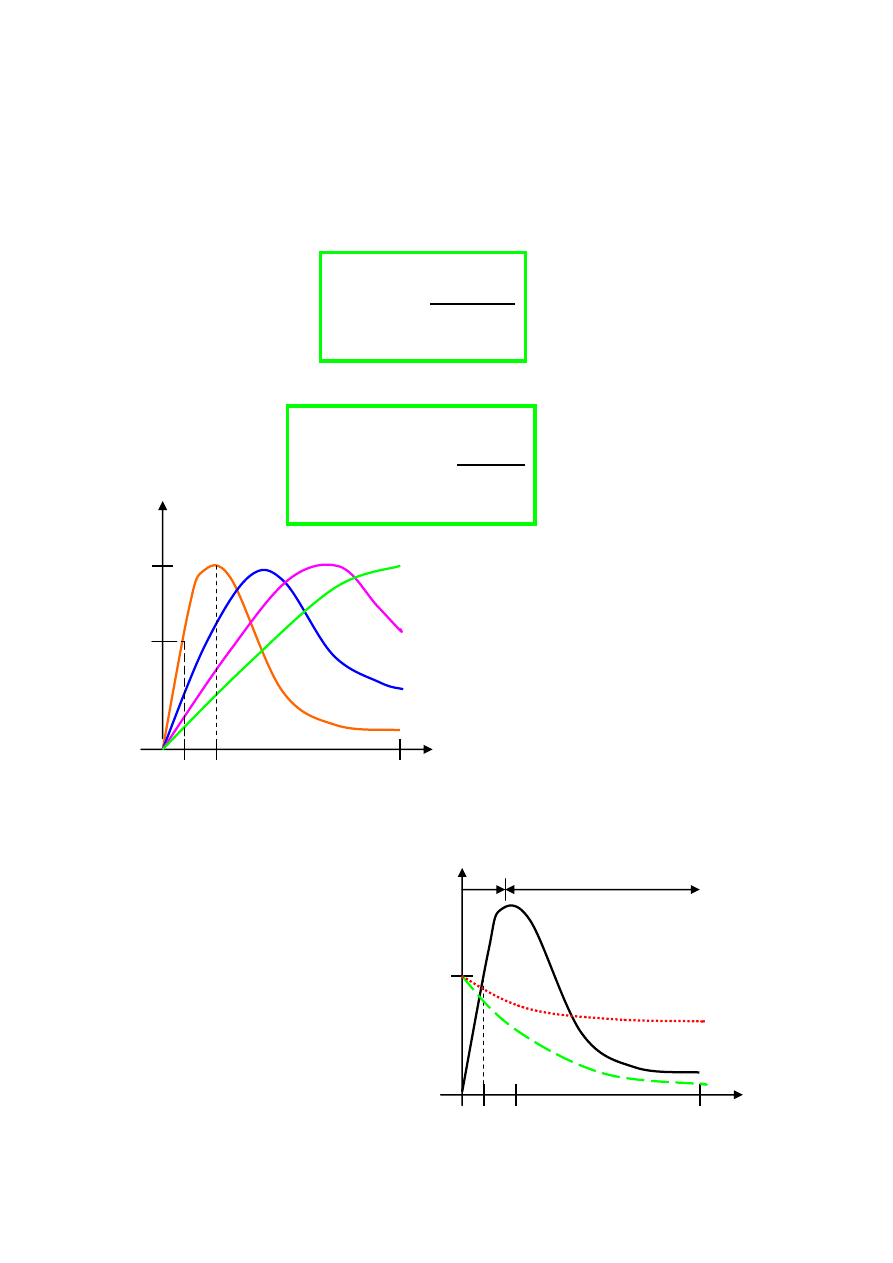
1. M
em
~ U
S
2
2. M
em
= 0 gdy s=0 (bieg synchroniczny)
3. Maksimum gdy
W
S
W
kr
L
R
s
4. Moment maksymalny
W
S
emkr
L
U
c
M
2
2
2
(niezależny od R
W
!)
0 s
N
s
kr
s = 1
(postój silnika)
=
S
=0
M
em
M
kr
M
N
s
N
= 0.04
– 0.08,
s
kr
= 0.15
– 0.25
M
kr
= 1.7
– 2.2 M
N
M
r
0.25
– 0.35 M
N
R
W
<
R
W
’
<
R
W
’’
<
R
W
’’’
M
r
’’’
M
r
’’
M
r
’
M
r
0 s
N
s
kr
s = 1
M
N
Zakres zakres
stabilny niestabilny
rozruch ciężki
(maszyny skraw.)
rozruch lekki
went. pompy
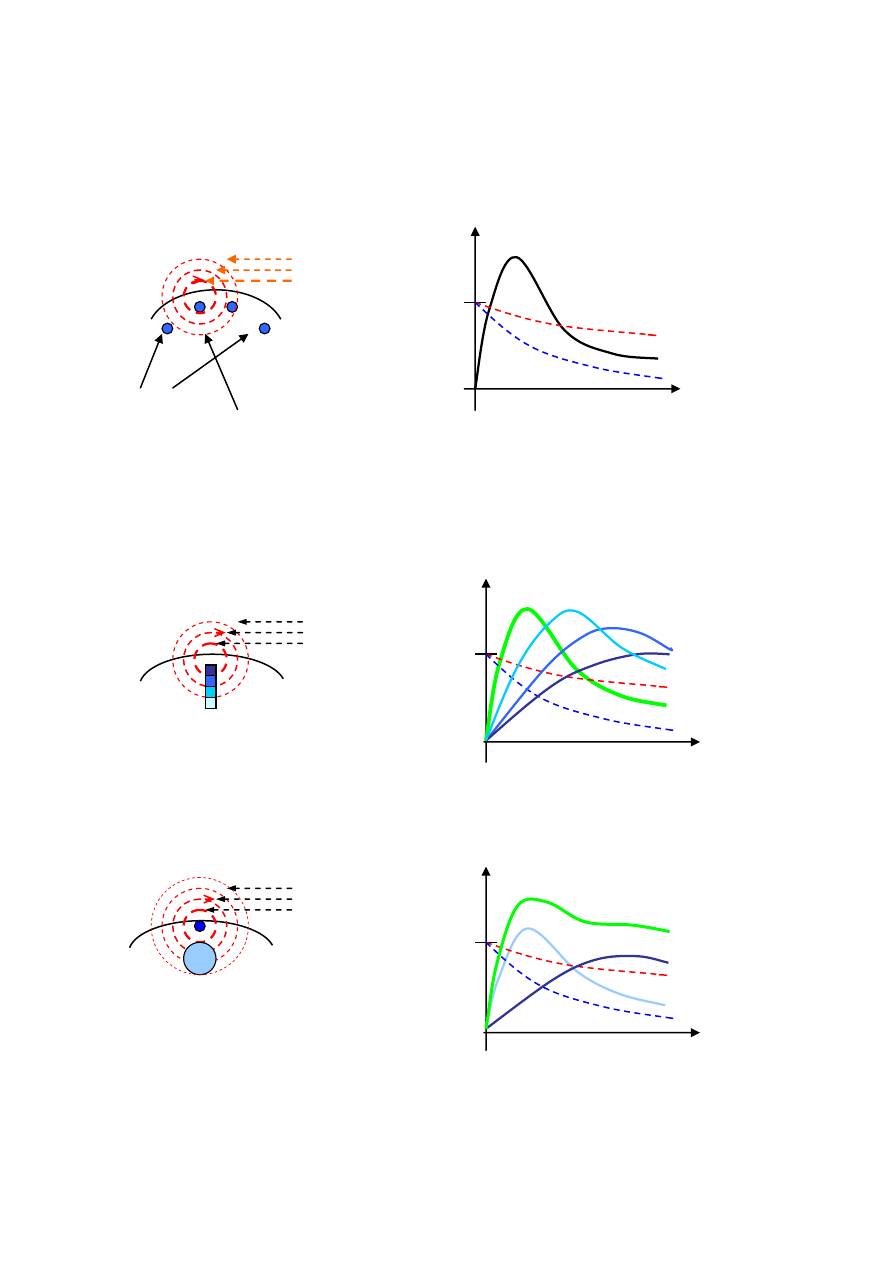
Rozruch silników indukcyjnych
Moment rozruchowy mały (w silnikach pierścieniowych można zwiększyć przez dołą-
czanie rezystancji w obwód wirnika)
Zwykły silnik klatkowy
Silnik klatkowy z głębokimi żłobkami
Silnik dwu-klatkowy
pręty
klatki lokalne pole
magnetyczne
W
S
W
0.5
S
W
0
W
S
W
0.5
S
W
0
M
s
s
W
S
W
0.5
S
W
0
s
M
M
Rozruch silników indukcyjnych (c.d.) przez zmianę podłączenia faz
I. Intencja zwiększenia momentu: przełączenie
(ale b. duży prąd rozruchu!) obroty nominalne
II. Intencja obniżenia prądu rozruchu
(ale b. mały moment rozruchu!) obroty nominalne
M
s
Prąd rozruchowy I
r
5
– 10 I
N
I
I
M
M
R R
U=220V
U=380V
U=220V
T S T S
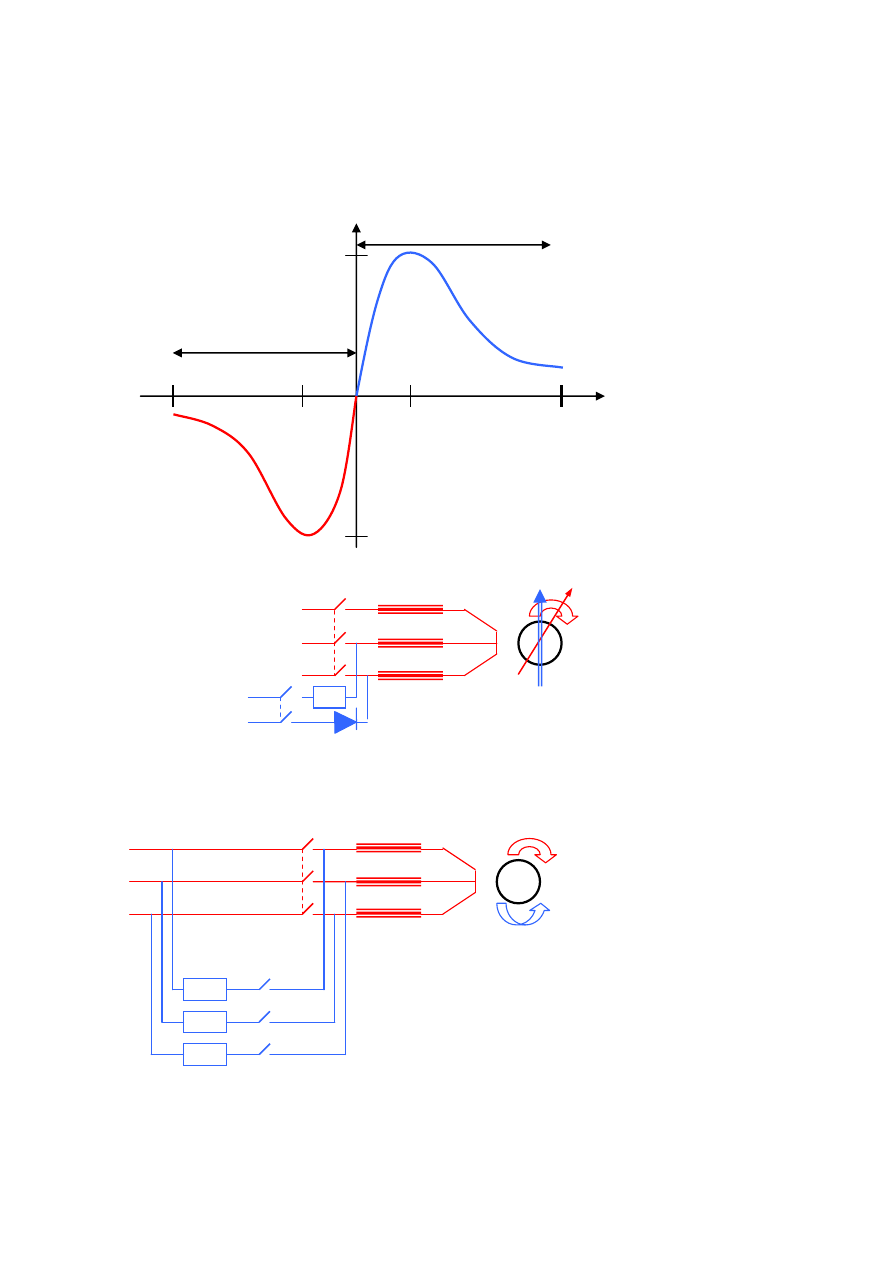
Hamowanie silników indukcyjnyc
h
1. Hamowanie generatorowe (wirnik wiruje szybciej niż
S
)
praca silnikowa
M
kr
praca generatorowa
-1 - s
kr
0 s
kr
1 s
- M
kr
można to zrealizować przez zasilenie stojana prądem stałym, np. wyprostowanym
Zalety: prosta realizacja,
wada: mały moment hamujący przy niskich obrotach
L1
S
3 ~
LH
R
h
1 ~
2. Hamowanie przeciwprądem (konieczne ograniczenie prądu po przełączeniu
kierunku wirowania pola stojana
L
1
R
h
L
h
po zmniejszeniu prędkości do wartości bliskich 0 należy wyłączyć zasilanie.
Możliwości regulacji prędkości obrotowej w silnikach indukcyjnych
p
f
s
n
n
n
60
)
1
(
s
n
=0.03
– 0.08
1. Silniki wielobiegowe
– przełączalna liczba par biegunów
Zalety: prosta i niezawodna konstrukcja,
Wady: gorsze wykorzystanie obwodu magnetycznego, większa (ok. 10-15%)
masa od maszyny jedno-biegowej,
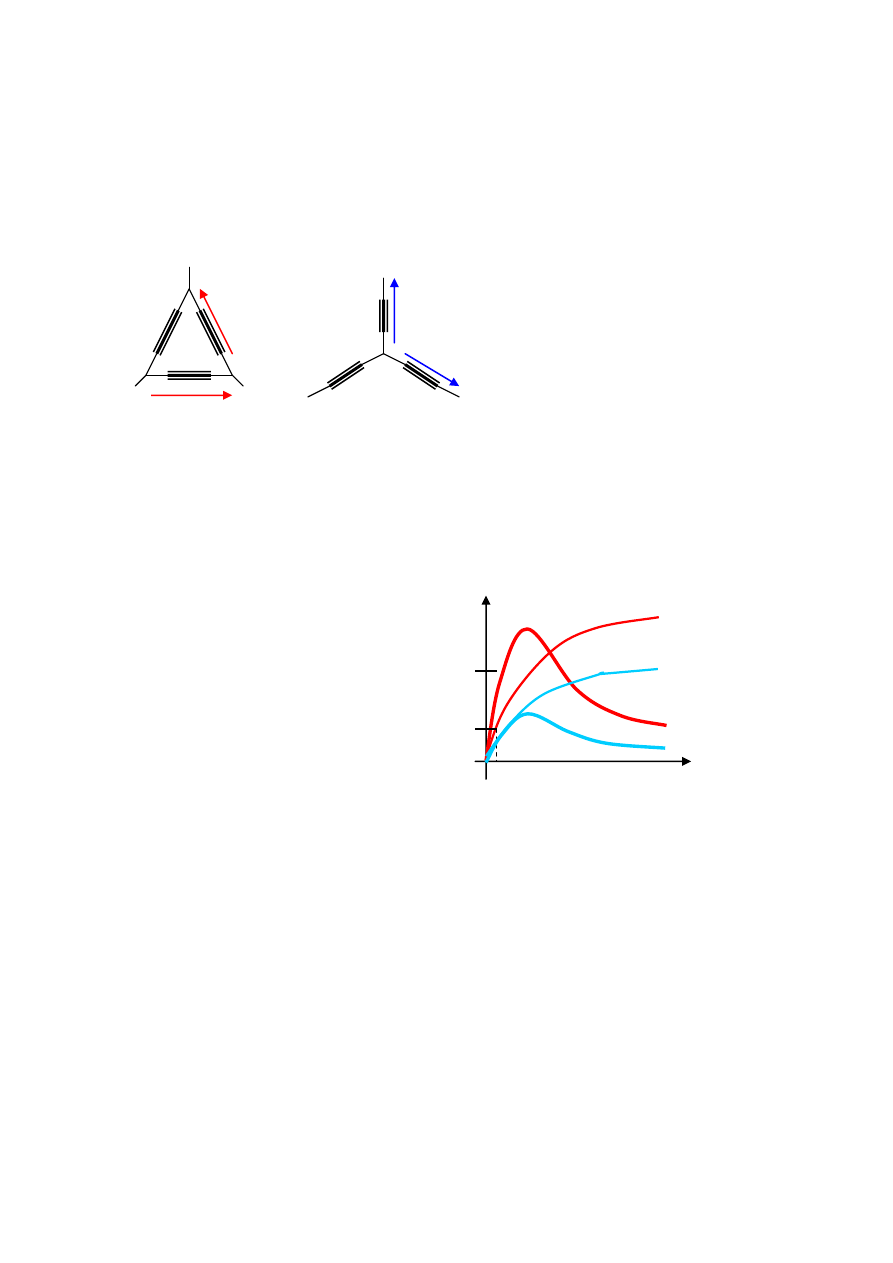
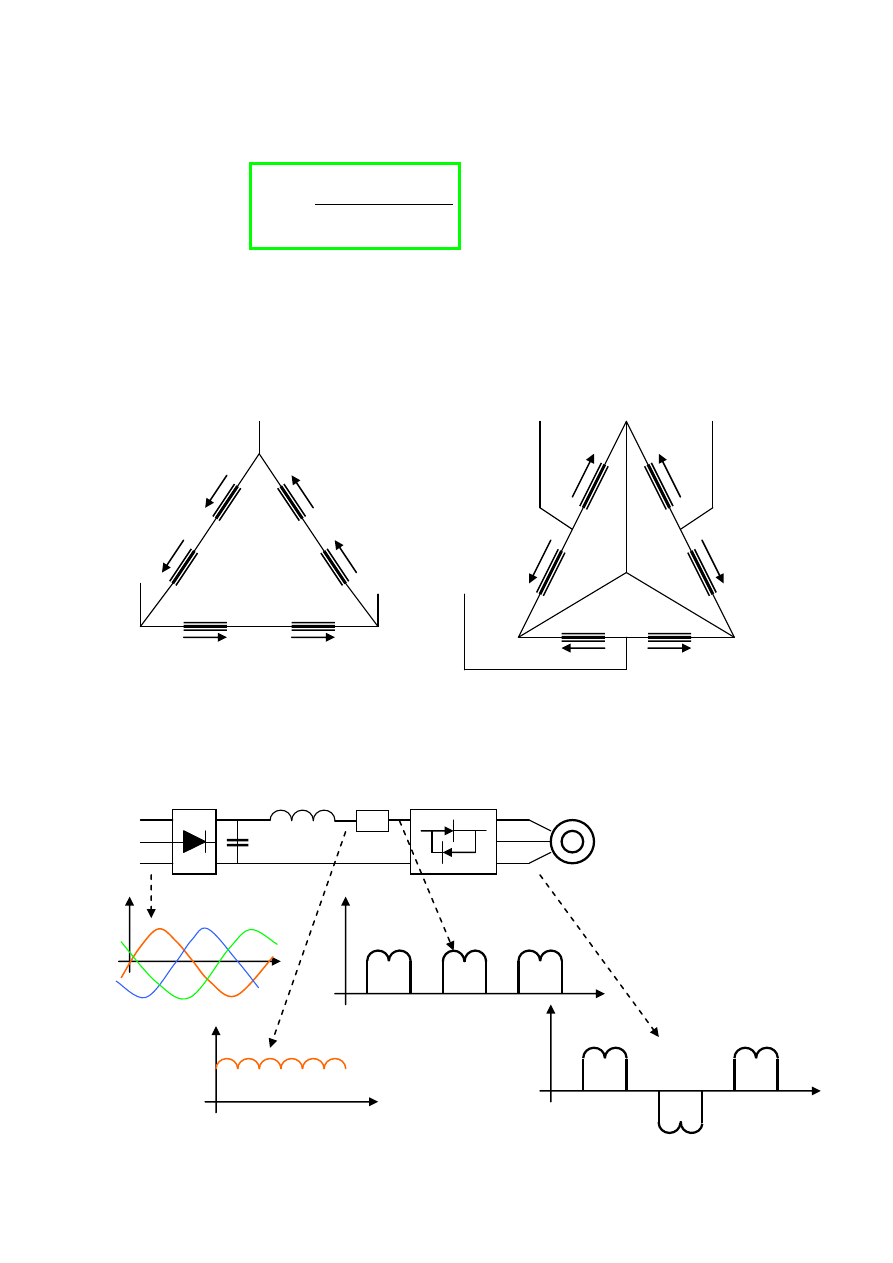
2. Połączenie Dahlandera
R
R
S
T
S
T
Połączenie prowadzi do powstania pary p’ = 2p biegunów w układzie trójkąta, za-
pewnia tą samą sprawność, przy czym M = 0.5 M
.
3. Sterowanie częstotliwością f
s
P N L Ł T F N
3 ~
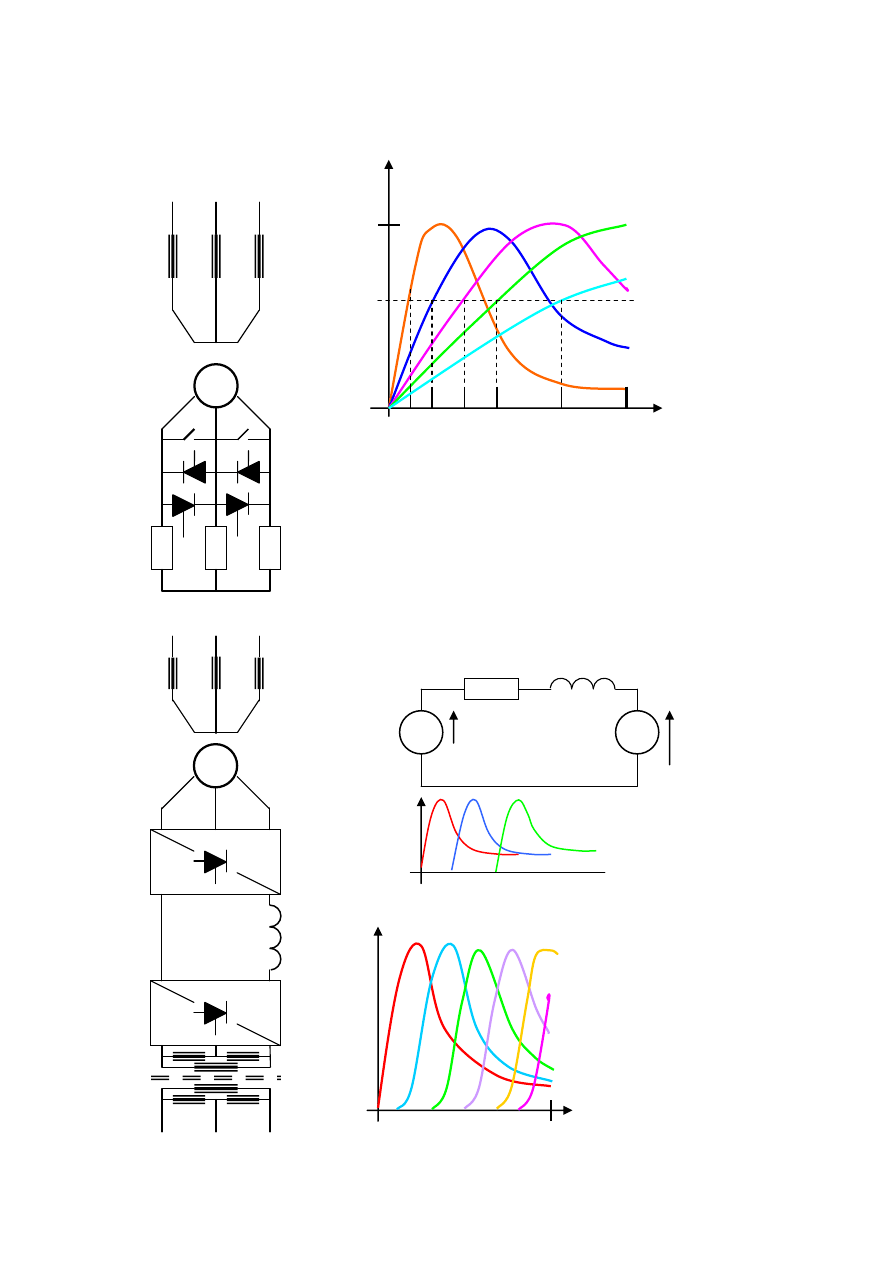
4. Sterowanie poślizgiem w silnikach pierścieniowych
(rezystory rozruchowe umożliwiają rozruch i zmieniają poślizg!)
R S T
4’’. Sterowanie (przesunięcie poślizgu nominalnego) – kaskada zaworowa
Każda z faz wirnika działa w uproszczeniu w następującym
układzie
3 ~
=0
o
1
<
0
2
<
1
2
<
3
M
obc
N
>
1
>
2
>
3
>
4
= 0
> 0
R
r
Mała sztywność charakterystyk dla większych
poślizgów, duże prądy wirnika, straty w rezysto-
rach rozruchowych, mała sprawość,
3 ~
=
=
3
P S
L
d
F S
Trafo
~
R
W
L
W
s E
S
~
k * E
S
k=0
,
k
1
>0
,
k
2
>
k
1
s=0 s=1
Zalety: b. dobra sztywność
ch-tyki mech.
b.d. sprawność,
praca maszyny jak
przy poślizgu nomin.
Wady: dość złożony układ,
dodatkowe trafo 3~,
dławik, F S.
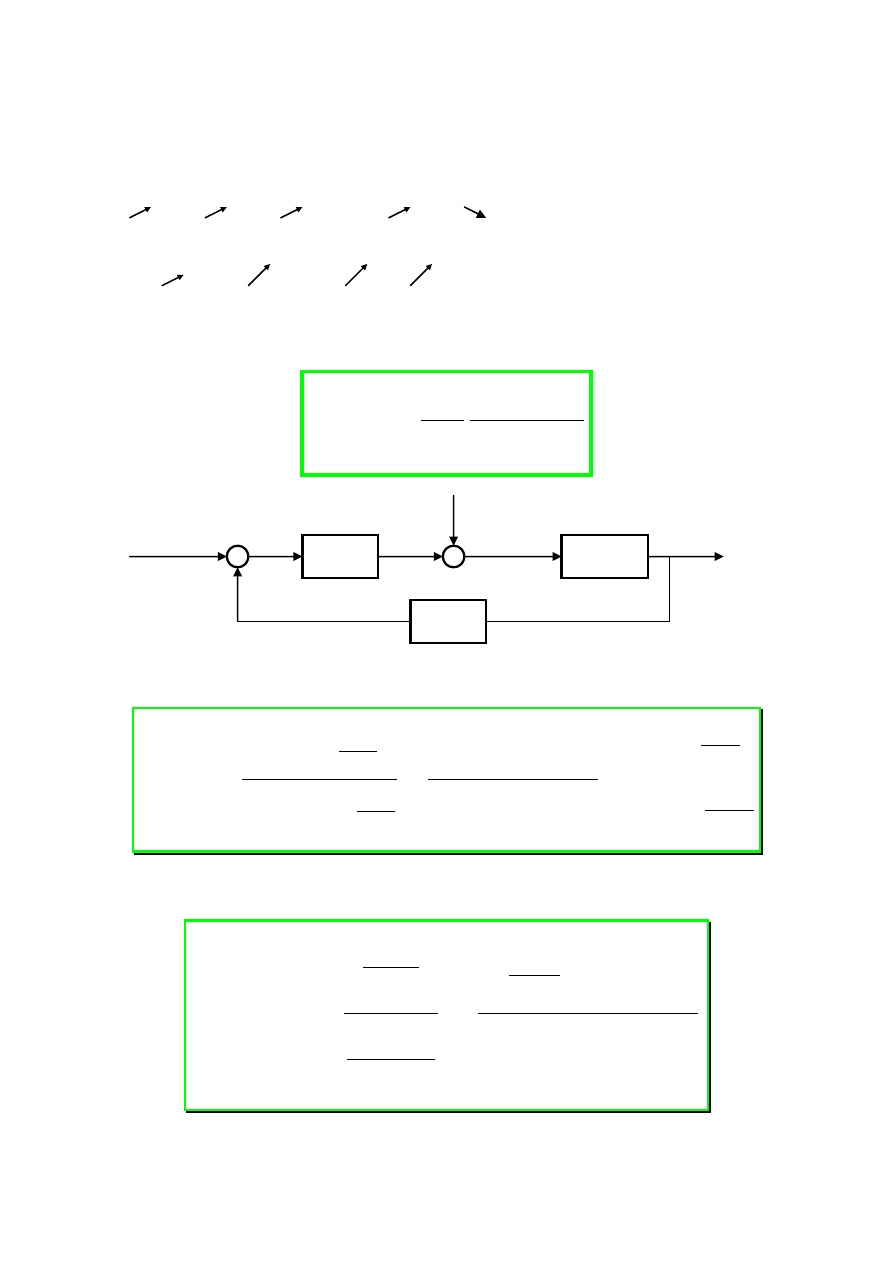
Silnik indukcyjny jako obiekt regulacji
Sterowanie prędkością umożliwia zmiana prędkości wirowania pola stojana, tzn.
S
f
S
w
,
M
obc
w
,
S
W
S
p
/
)
(
U
S
........
M
em
,
M
em
I
W
=>
I
S
D
la poślizgów małych s << s
kr
)
1
(
1
2
)
(
W
kr
M
sT
p
s
G
wpływ zmian prędkości jest zależny od sprowadzonej bezwładności napędu B’
Z
kr
W
W
W
W
M
M
f
M
M
B
B
R
L
T
BT
s
sB
sB
s
G
sB
s
G
s
G
'
,
1
1
'
1
)
(
1
'
1
)
(
)
(
2
wpływ zmian momentu obciążającego na zmiany prędkości
W
W
kr
krn
ob
S
Mo
BT
s
sB
sT
p
M
M
s
G
2
1
)
1
(
2
)
(
G
M
(s)
1/sB’
1/2
f/f
n
+
M
e
/M
n
-
M
o
/M
/
S
-
Elektroniczne elementy przełączające (dużej mocy)
Typ elementu
Prąd dopusz-
czalny [A]
Napięcie
wsteczne [kV]
Czas przełą-
czania [
s]
Spadek naięcia
na złączu [V]
Diody prostow-
nicze
szybkie
wielko-
prądowe
4000
2500
7000
2.8
1.4
0.2
6
4
-
0.6
0.5
0.45
Tyrystory
SCR
impulsowe
szybkie
4000
1000
400
5
3.5
2
650
55
20
1.1
1.2
1.2
Tranzystory
IGBT
400
1.2
1.6
0.8
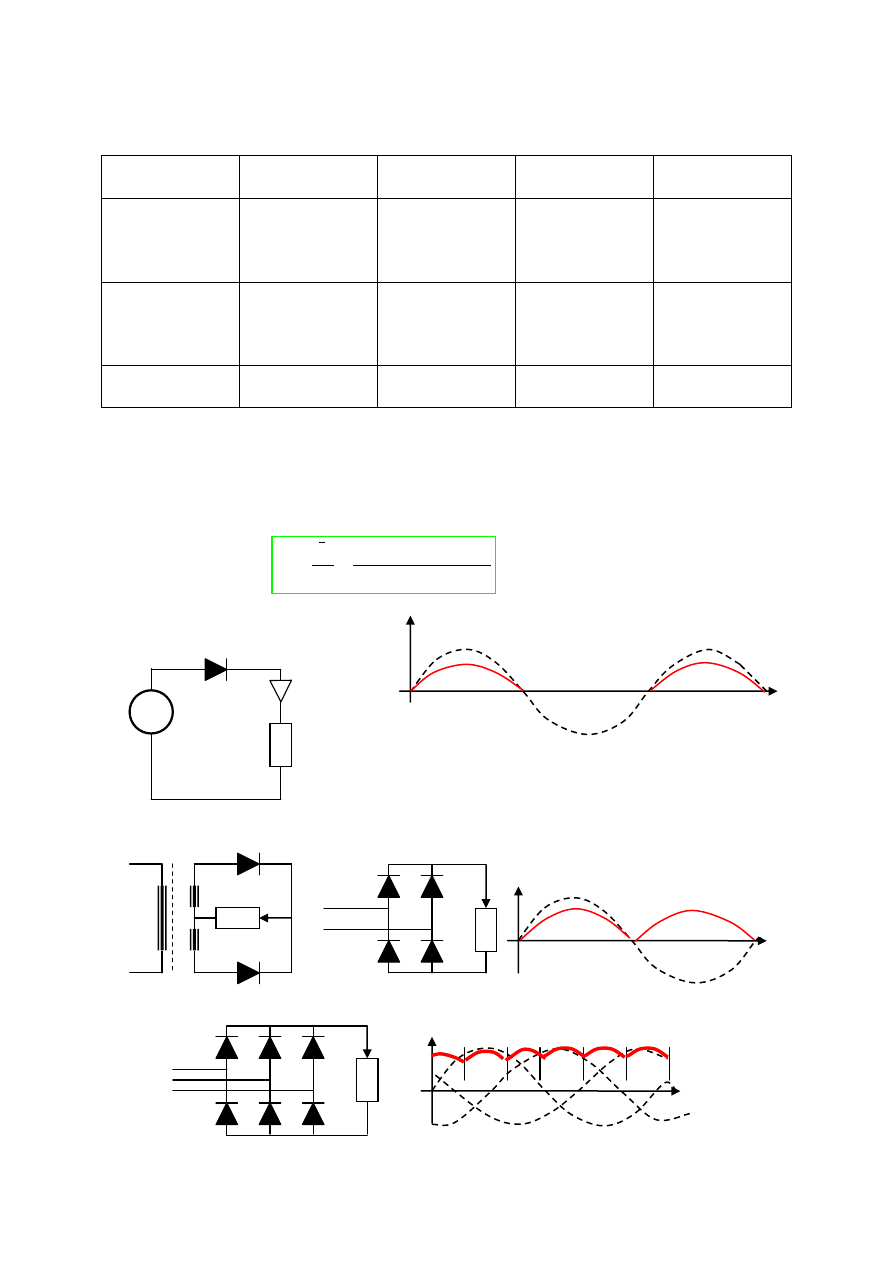
Prostowniki sterowane
(o zmiennej wartości średniej napięcia)
Dobroć prostownika określa tzw. współczynnik kształtu k
f
skuteczna
wart
srednia
wart
I
I
k
sk
f
.
.
dla ideału (tzn. prądu =) k
f
=1
Prostownik jedno-pulsowy
Prostownik dwu-pulsowy mostkowy
R
odb
I
R
odb
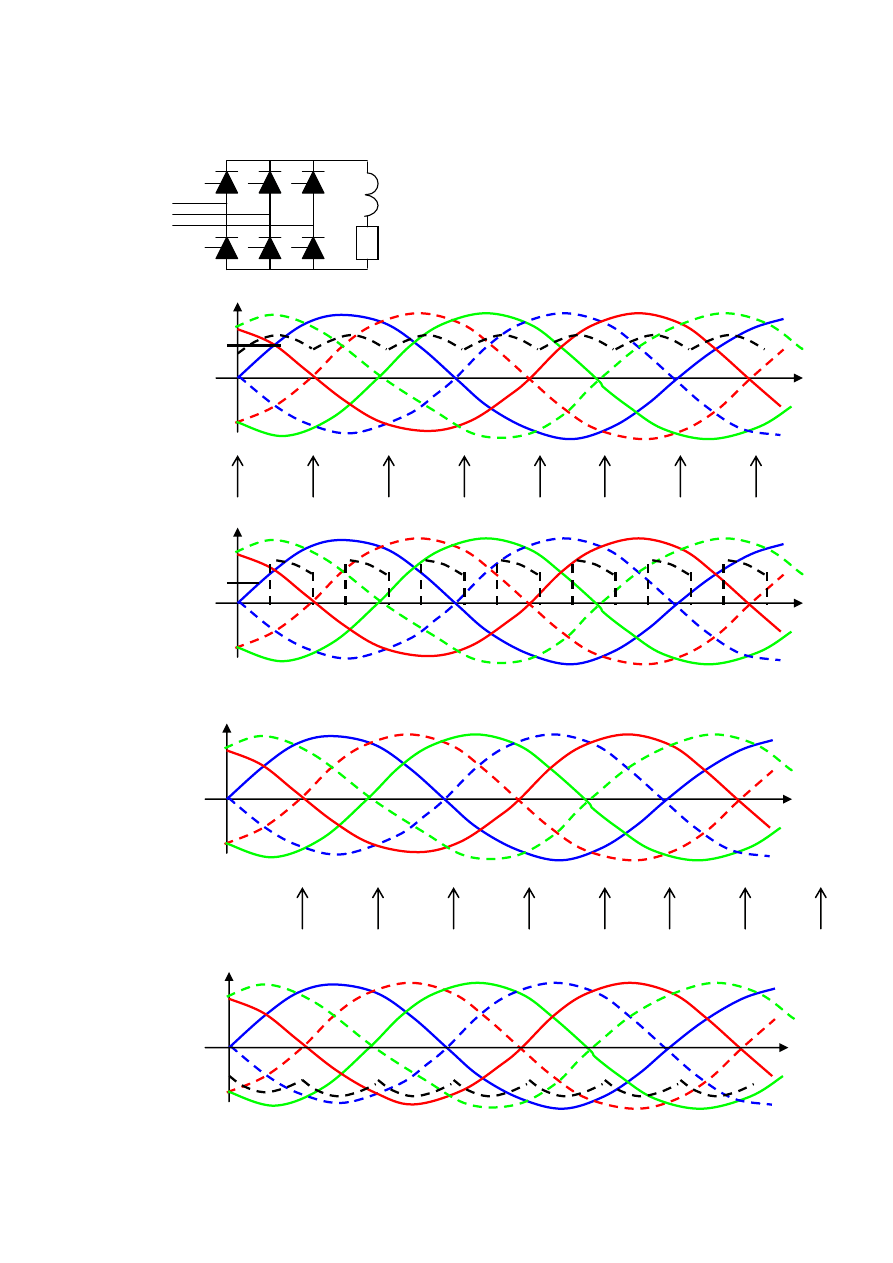
Prostownik sześcio-pulsowy
3
R
odb
I
u, i k
f
=2.3
u, i k
f
=1.57
u, i k
f
=1.1
Prostownik 6-pulsowy sterowany (m
ożliwość zmiany wartości średniej napięcia)
3
L
d
R
Kąt wysterowania tyrystorów dla dodatnich po-
ziomów napięcia
<60
o
, 120
o
>
dla napięć ujemnych
<240
o
, 300
o
>
= 0
U
sr
= Umax
= 90
o
U
sr
=
0.5 Umax
= 120
o
U
sr
= 0
= 240
o
U
sr
= - Umax
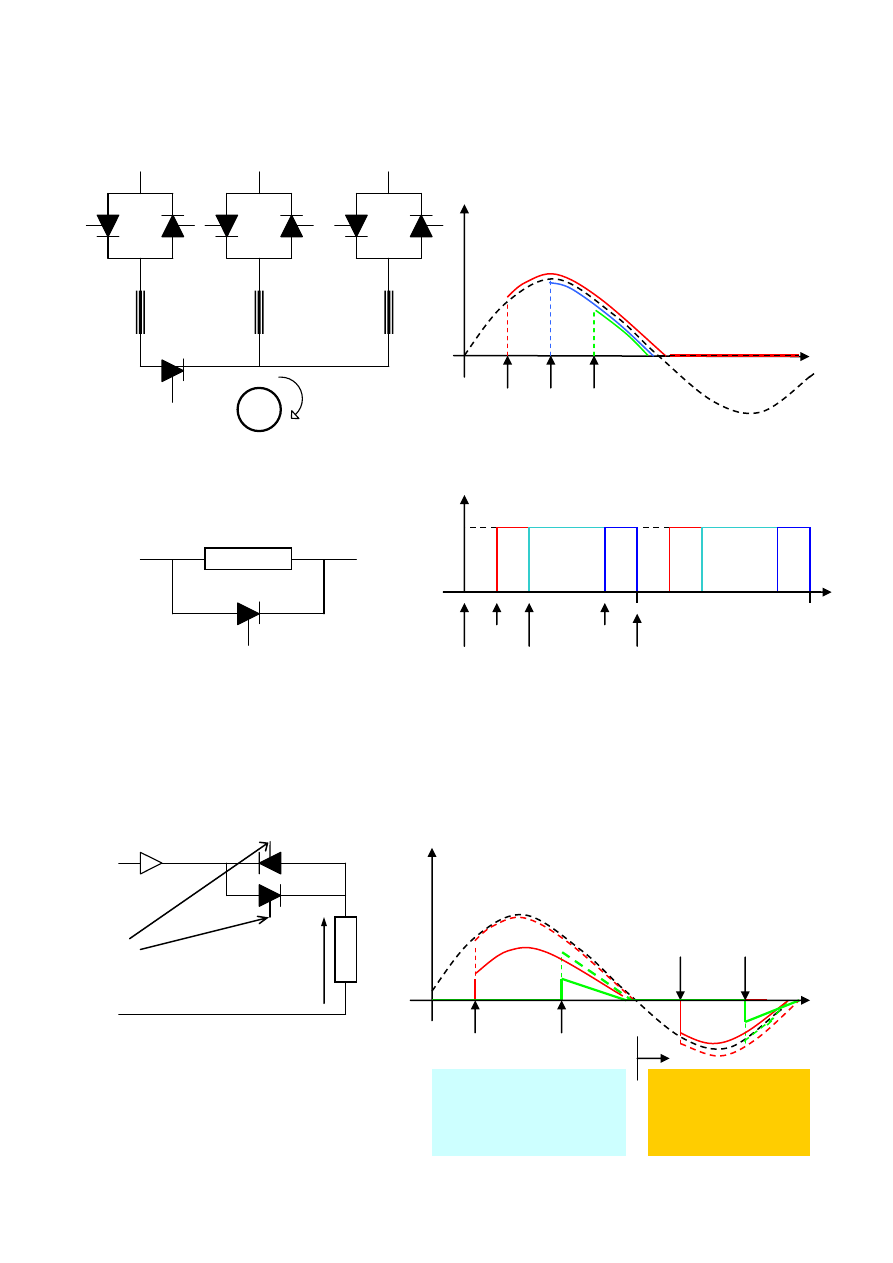
2. Elektroniczne obniżanie napięcia
3. Elektroniczne sterowanie rezystancją
R
0 T 2T
wysterowanie
80%
20%
okresu zwarcia R: 100% 60% 0%
efektywna wartość R: 0% 40% 80%
20% 100%
4. Sterowanie czasowe w obwodach prądu zmiennego
z rezystancją
u(t), i(t)
i(t)
u(t)
R
=45
o
=135
o
kąt zapłonu
t
3 ~
R S T
kąt zapłonu:
=0,
=
/2
=
=3
/4
napięcie : max, ~0.78, ~0.5, ~0.22
=45
o
=135
o
Tyrystor po podaniu
impulsu przewodzi po-
nieważ polaryzacja jest
odpowiednia
Tyrystor nie prze-
wodzi ponieważ
polaryzacja jest
zaporowa
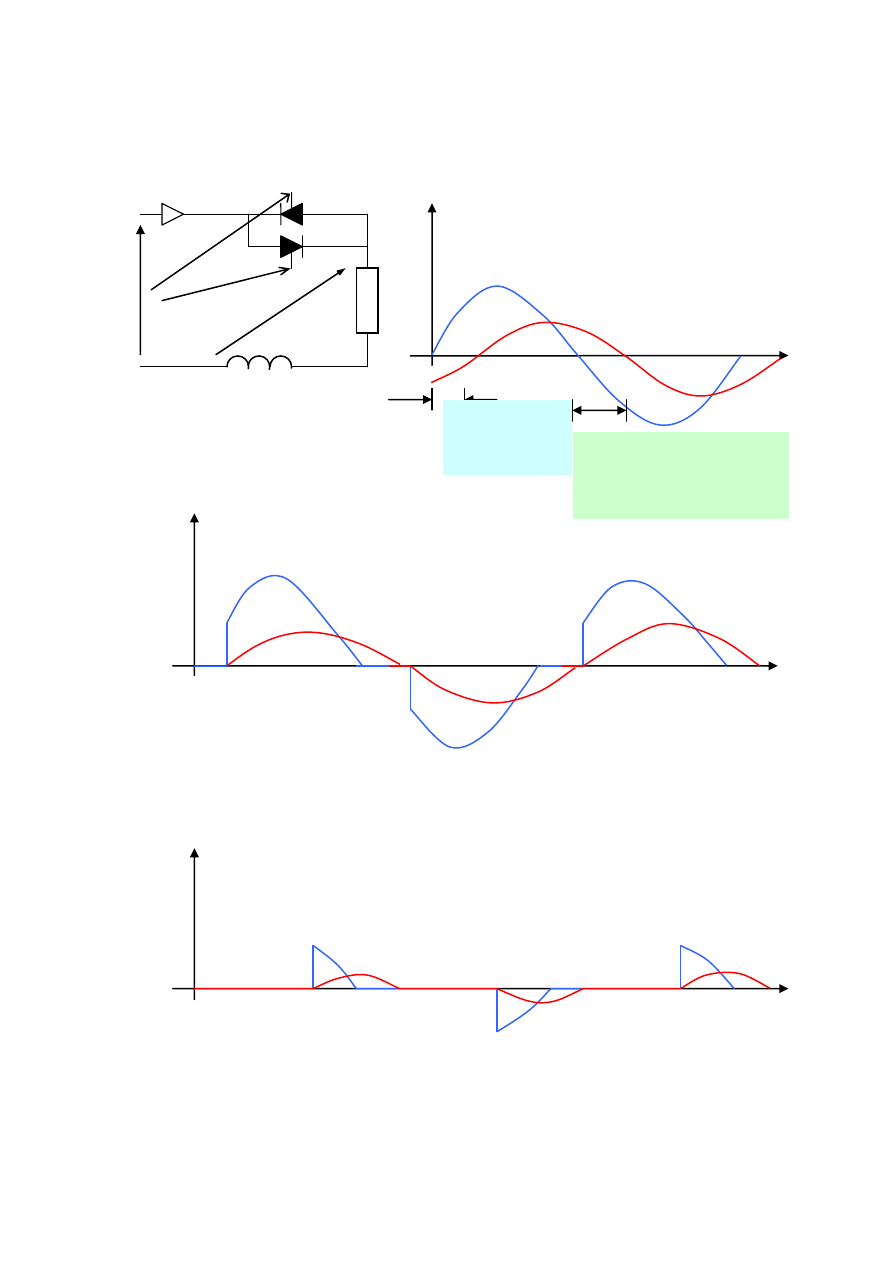
4. Sterowanie czasowe w obwodach prądu zmiennego z rezystancją R i indukcyjno-
ścią L
U(t)
i
L
(t)
u
L
(t), i
L
(t) kąt zapłonu 0
o
kąt zapłonu
R
u
L
(t)
u
L
(t)
i
L
(t)
L
t
kąt zapłonu
~ 45
o
u
L
(t), i
L
(t)
u
L
(t)
i
L
(t)
t
kąt zapłonu
~ 135
o
u
L
(t), i
L
(t)
u
L
(t)
i
L
(t)
t
zakres dodat-
niej polaryza-
cji tyrystora
Rozszerzenie zakresu
dodatniej polaryzacji po-
wodowane przez efekt
samoindukcji cewki L
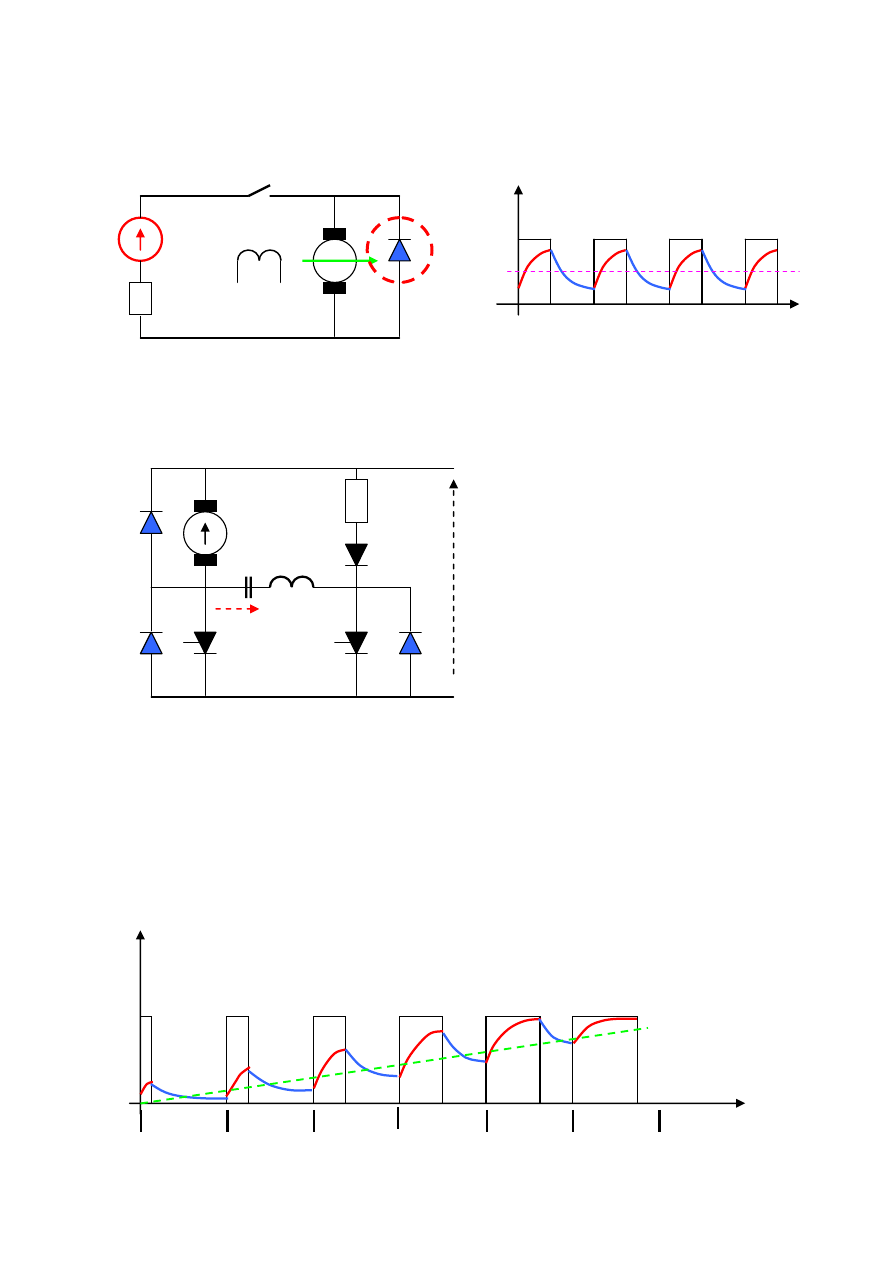
Sterowanie silnikiem prądu stałego
W
U
t
I
t
E
zas
D
I
sr
wzb
.
R
w
Wzb.
I
E
I
D
I
E
I
D
I
E
I
D
I
E
Sterowany wyłącznik tyrystorowy
D
1
R
d
C
K
L
K
D
2
U
U
K
2U
D
3
T
G
T
P
D
4
Sterowanie wypełnieniem zmiennym w czasie – płynne zwiększanie
lub zmniejszanie prędkości
1. T
G
zwarty, silnik pracuje,
następuje ładowanie C
K
przez L
K
do wartości
2U.
Po naładowaniu C
K
nie może się
rozładować bo diody D
2
i D
4
są
podłączone zaporowo.
2. Podawany jest impuls wyzwalaj
ą-
cy na T
P
, który zwiera i podaje na
anodę T
G
napięcie o wartości
2U ale skierowane w kierunku
zaporowym, T
G
przestaje prze-
wodzić, C
K
rozładowuje się, przez
T
P
i D
3
,
3.
Silnik się kręci i przez diodę D
1
podtrzymywa
ny jest przepływ
prądu, który może zaniknąć cał-
kowicie jeśli nie
4.
Następuje ponowne zapalenie T
G
,
ładowanie C
K
, itd.
U
Z
I
Ł
,
I
r
,
n
sr
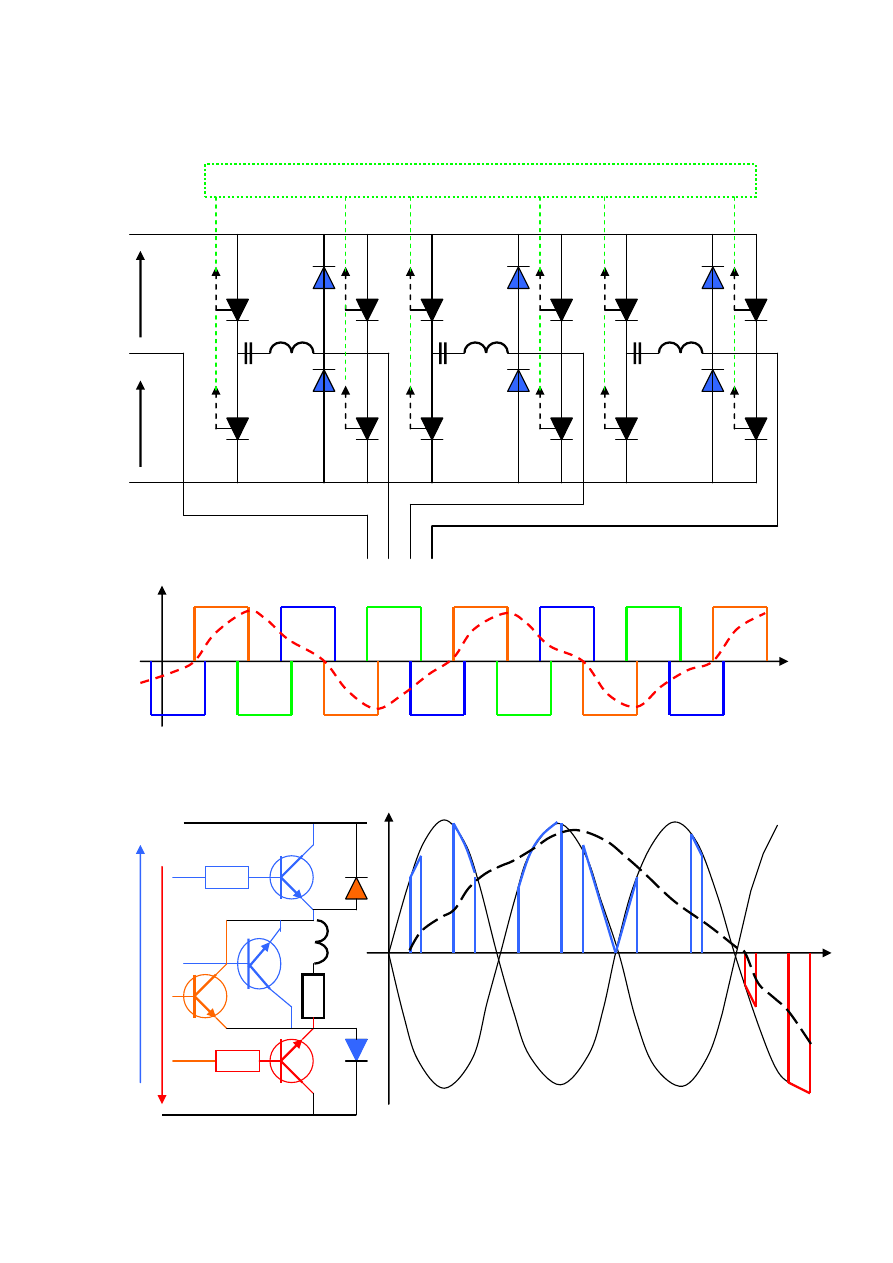
Zasilanie silników prądu zmiennego
Sterowanie z wykorzystaniem szybkich tranzystorów przełączających IGBT
+
TG
U
TP
TP
TG
Układ sterujący wyzwalaniem tyrystorów dla kolejnych faz
U/2
0
U/2
U(t) 0
R
S
T
Wyszukiwarka
Podobne podstrony:
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
A3 Silnik indukcyjny pierscieniowy program
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Badanie silnika indukcyjnego jednofazowego
silnik indukcyjny piercieniowy
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Instrukcja do ćw 15 Montaż i uruchomienie układu nawrotnego silnika indukcyjnego
indukcyjny pierść, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.5 - Silnik
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
Badanie silnika indukcyjnego trójfazowego
silnik indukcyjny
Badanie trójfazowego silnika indukcyjnego pierscieniowego
Silnik indukcyjny jednofazowy
Parametry silników indukcyjnych jednofazowych CEG
02 silnik 14i16 8zaworowy
Silnik indukcyjny pierścieniowy
Dynamika silnika indukcyjnego
Regulacja prędkości kątowej silników indukcyjnych w układach kaskadowych – kaskada stałomomentowax
więcej podobnych podstron