2.Zamień zadaną liczbę dziesiętną na wybrany kod: BIN, OCT
Liczba:
100 na kod BIN
100 : 2 = 50, reszty 0
50 : 2 = 25, reszty 0
25 : 2 = 12, reszty 1
12 : 2 = 6, reszty 0
6 : 2 = 3, reszty 0
3 : 2 = 1, reszty 1
1 : 2 = 0, reszty 1
( dla przykładu 25:2=12,5 jeżeli wynikiem dzielenia jest liczba z resztą po przecinku to piszesz reszty 1.
12:2=6 bez liczby po przecinku reszta dzielenia piszesz 0.)
Zbieramy reszty z dzielenia od dołu = 1100100
Liczba:
100 na kod OCT
100/8 = 12 reszta 4 (100:8=12,5 12*8=96 100-96=4)
12/8 = 1 reszta 4 (12:8=1,5 1*8=8 12-8=4)
1/8 = 0 reszta 1 (1:8=0,125 jeżeli wyjdzie Ci liczba z 0 przed przecinkiem to bierzesz ostatnią liczbę
całkowitą jaka wyszła przed otrzymaniem wyniku 0,… i podajesz ją jako resztę)
Zbieramy reszty z dzielenia od dołu = 144
5. Wymień podstawowe elementy sterowników PLC i ich podział ze względu na budowę.
Klasyczna budowa sterownika PLC:
- zasilacz,
- jednostka centralna,
- moduł wejść cyfrowych,
- moduł wyjść cyfrowych,
- moduł wejść analogowych,
- moduł wyjść analogowych,
- moduły komunikacyjne,
- moduły specjalne.
Podział ze względu na budowę:
- kompaktowe (o architekturze sztywnej)
- modułowe (o architekturze elastycznej)
6. Scharakteryzuj parametry sygnałów we/wy sterowników PLC.
Wejście cyfrowe - ogólnie przyjęta nazwa pojedynczego wejścia binarnego sterownika PLC, mogącego
mieć dwa stany: "0" - brak napięcia i "1" - jest napięcie. Wejścia cyfrowe są podstawowymi blokami
wejściowymi sterowników PLC. Do nich docierają sygnały w postaci "0" lub "1" z np. przycisków
sterowniczych, czujników itp. Na podstawie tych sygnałów sterownik PLC steruje wg zawartego w nim
algorytmu pozostałymi elementami poprzez wyjścia cyfrowe lub wyjścia analogowe.
Wyjście cyfrowe - ogólnie przyjęta nazwa pojedynczego wyjścia binarnego sterownika PLC. Binarne
wyjścia cyfrowe mogą przyjmować jeden ze stanów:"0" - brak napięcia "1" - jest napięcie. Wyjścia
cyfrowe są podstawowymi składnikami bloków wyjść sterowników PLC. Produkowane są (przeważnie)
dwa rodzaje wyjść: tranzystorowe o obciążalności 0,5 A oraz przekaźnikowe o obciążalności 8 A.
Poprzez wyjścia cyfrowe sterownik steruje urządzeniami zewnętrznymi takimi jak: styczniki,
elektrozawory, lampki kontrolne, sygnały akustyczne, itd.
Wejście analogowe - ogólnie przyjęta nazwa pojedynczego wejścia sterownika PLC dla standardowych
sygnałów analogowych. Przyjęte standardy to:
0...20 mA
4...20 mA
0...10 V
Wejścia analogowe służą do pomiarów m.in.: temperatury, ciśnienia, przepływu, obrotów, itp. Pomiary
te odbywają się poprzez zamianę wartości np. temperatury na sygnał analogowy o wartości np. 0...10
V. Sygnały te są przetwarzane w sterowniku PLC i sterownik reaguje wg ustalonego algorytmu
poprzez wysterowanie odpowiednich wyjść cyfrowych lub analogowych
Wyjście analogowe - ogólnie przyjęta nazwa pojedynczego wyjścia analogowego sterownika PLC.
Standardowe wyjścia analogowe mają wartości:
- 0...20 mA
- 4...20 mA
- 0...10 V
Wyjście analogowe jest podstawowym składnikiem bloków wyjść analogowych sterowników PLC.
Sterownik poprzez te wyjścia może wysterować urządzeniami zewnętrznymi takimi jak: regulatory
temperatury, przetwornica częstotliwości, serwonapęd.
7.Wymień i krótko opisz języki programowania sterowników PLC.
Języki graficzne:
SFC język przebiegu
Język przebiegu jest jednym z języków zorientowanych graficznie, opisujących czasowy przebieg
różnych czynności wewnątrz programu. W tym celu język wykorzystuje grafy zawierające kroki, dla
których przypisane są określone akcje, i tranzycje, które sterują przebiegiem kroków.
LD schemat styków (drabinka)
Schemat styków nadaje się z jednej strony do konstruowania zespołów przełączających, z drugiej zaś
można dzięki niemu tworzyć sieci podobnie jak w FBD. Dlatego też schemat styków można dobrze
wykorzystać do sterowania wywoływaniem innych modułów. Schemat styków składa się z ciągu sieci.
FBD schemat funkcji
Schemat funkcji to ukierunkowany graficznie język programowania. Działa on w oparciu o listę sieci,
przy czym każda sieć posiada strukturę, przedstawiającą zawsze jakieś wyrażenie logiczne wzgl.
arytmetyczne, wywołanie bloku funkcji, skok lub instrukcję powrotu. W graficznym edytorze
schematów funkcji nie są używane sieci.
IL Lista instrukcji
Składa się z ciągu instrukcji. Każda instrukcja zaczyna się w nowym wierszu i zawiera operator i, w
zależności od rodzaju operacji, jeden lub kilka argumentów oddzielonych przecinkami.
ST tekst zhierarchizowany
Tekst zhierarchizowany składa się z szeregu instrukcji, które tak jak w językach wyższego rzędu mogą
być wykonywane warunkowo (IF..THEN..ELSE) lub w pętlach (WHILE..DO).
8.Wymień i krótko opisz moduły specjalizowane dla sterowników PLC
moduły do pomiaru temperatury – stanowią dodatkowy interfejs analogowy, umożliwiający
podłączenie specjalnych czujników pomiarowych, takich jak termopary, czujniki półprzewodnikowe
czy czujniki rezystancyjne (np. Pt 100, Pt 1000, Ni 100);
moduły szybkich liczników (ang. HSC –
High Speed Counter) – umożliwiają zliczanie
zewnętrznych impulsów o wysokiej częstotliwości (100kHz, 1MHz). Wykorzystywane są najczęściej
w układach sterowania napędów elektrycznych, w roli interfejsów do podłączenia obrotowo-
impulsowych przetworników do pomiaru położenia i prędkości (tzw. enkoderów inkrementalnych).
Oprócz tego umożliwiają pomiar częstotliwości i okresu sygnałów prostokątnych, pochodzących od
zewnętrznych urządzeń, np. przetworników pomiarowych z wyjściem częstotliwościowym.
moduły generatorów impulsów i sygnałów PWM – Umożliwiają wytworzenie sygnałów
prostokątnych o zadanej częstotliwości i współczynniku wypełnienia (tzw. modulacja PWM – ang.
Pulse Width Modulation). Są powszechnie stosowane do sterowania pracą silników krokowych i
prądu stałego.
moduły pozycjonowania osi (ang. APM –
Axis Positioning Module) – stosowane do sterowania
wieloosiowych napędów pozycjonujących.
moduły precyzyjnych wejść analogowych – moduły wejść analogowych o specjalnie
dobranych zakresach i zwiększonej rozdzielczości. Wykorzystywane są do precyzyjnych pomiarów
sygnałów o małych wartościach, pochodzących z czujników specjalnych, mostków
tensometrycznych i urządzeń automatyki wagowej.
9.Wymień i krótko opisz typy regulatorów stosowanych w układach regulacji.
Regulatory o działaniu ciągłym
(analogowym)
zmieniają wartość wielkości sterującej obiektem w
sposób ciągły, tzn. wielkość ta może przyjmować wszystkie wartości z założonego zakresu
zmienności. Regulatory ciągłe budowane są przeważnie z elektronicznych wzmacniaczy operacyjnych.
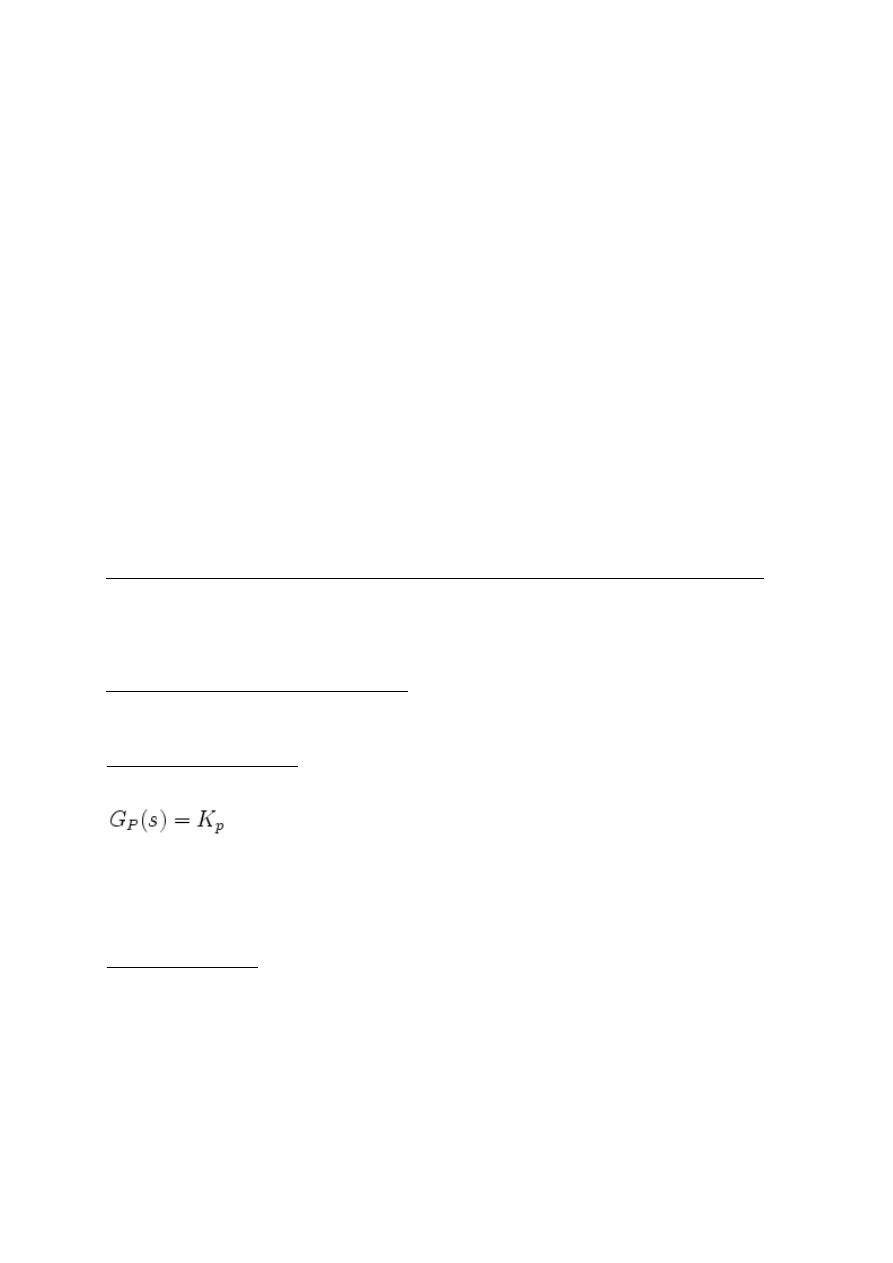
Regulator P (proporcjonalny) składa się z jednego członu typu P (proporcjonalnego), którego
transmitancję określa wzmocnienie:
W regulatorze tym sygnał wyjściowy jest proporcjonalny do wejściowego. Na podstawie sygnału
podawanego na wejście regulatora, wytwarza on proporcjonalny sygnał sterujący, przy czym celem
jest utrzymanie wartości wyjściowej układu na pewnym z góry zadanym poziomie, który jest zwany
wartością zadaną (dążenie do eliminacji uchybu regulacji).
Regulator I (całkujący)
umożliwia realizację regulacji astatycznej. Z obiektami astatycznymi może
tworzyć niestabilne układy regulacji. Może być stosowany głównie w obiektach statycznych
charakteryzujących się powolnymi zmianami obciążenia.
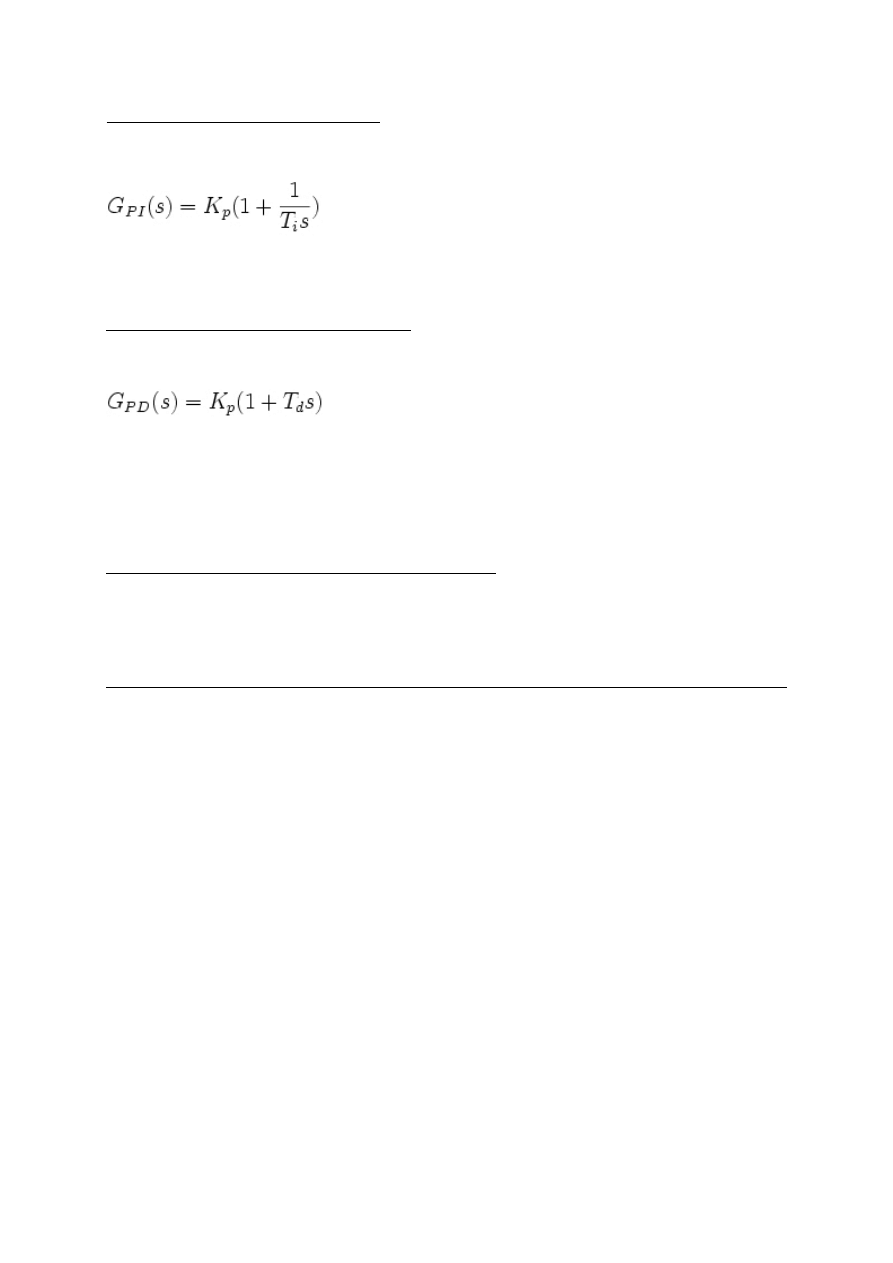
Regulator PI (proporcjonalno - całkujący) - w automatyce, regulator składający się z członu
proporcjonalnego P o wzmocnieniu Kp oraz całkującego I o czasie całkowania Ti. Transmitancję
regulatora PI określa się wzorem:
Regulatory typu PI pozwalają na eliminację wolnozmiennych zakłóceń, co przekłada się na zerowy
uchyb ustalony, niemożliwy do osiągnięcia w regulatorach typu P lub typu PD.
Regulator PD
(proporcjonalno - różniczkujący)
- w automatyce, regulator składający się z członu
proporcjonalnego P o wzmocnieniu Kp oraz różniczkującego D (fizycznie nierealizowalnego) o czasie
różniczkowania Td. Transmitancję idealnego regulatora PD określa się wzorem:
Działanie członu różniczkującego przeciwdziała szybkim zmianom sygnału błędu, co wpływa
stabilizująco na działanie układu regulacji. Pozwala to w pewnej mierze na zwiększenie intensywności
działania pozostałych parametrów regulatora.
Regulator PID (
proporcjonalno - całkująco – różniczkujący)
jego celem jest utrzymanie wartości
wyjściowej na określonym poziomie, zwanym wartością zadaną. Regulatora PID używa się np. do
sterowania temperaturą procesu, w tym wypadku działa on jak bardzo dokładny termostat. Może
również sterować ciśnieniem, natężeniem przepływu, składem chemicznym, siłą, prędkością i innymi
sygnałami. Regulatory znajdują zastosowanie w przemyśle samochodowym, w tym przypadku ich
zadaniem jest utrzymywanie stałej prędkości samochodu bez względu na warunki jazdy (tzw.
tempomat).
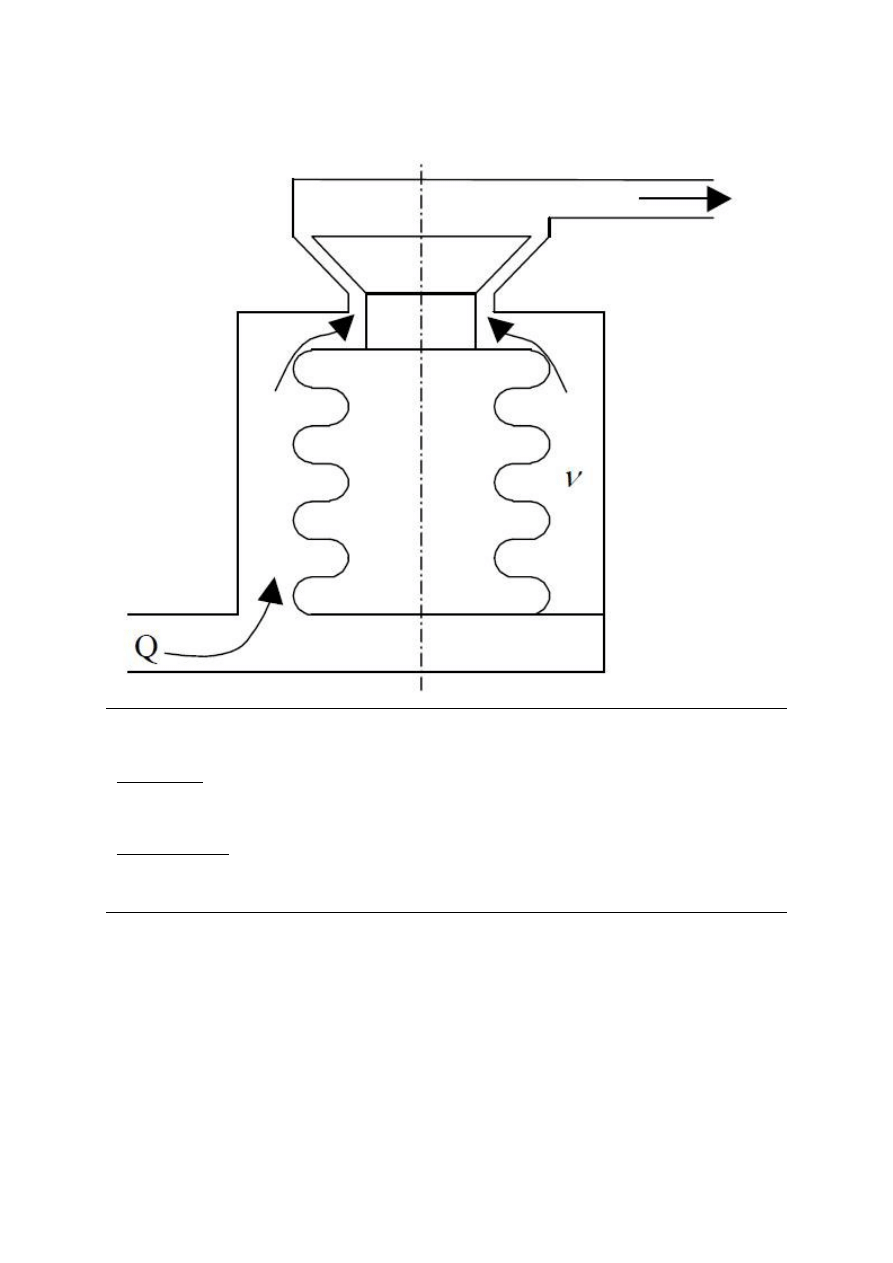
10.Narysuj i opisz pracę regulatora bezpośredniego działania przy regulacji przepływu w
zależności od temperatury.
11.Opisz klasyfikację układów regulacji ze względu na charakter sygnałów.
-
układy ciągłe - wszystkie sygnały (wejściowe i wyjściowe) są funkcjami ciągłymi w czasie i mogą
przybierać dowolną wartość z obszaru swojej zmienności. Układy te opisuje się zwykle równaniami
różniczkowymi.
-
układy dyskretne - układ jest dyskretny, jeżeli przynajmniej jeden jego sygnał ma charakter
dyskretny, tzn. przyjmuje tylko określone wartości dla określonych argumentów. Układy takie opisuje
się zwykle równaniami różnicowymi.
12.Opisz klasyfikację układów regulacji ze względu na zadania układu
-
układy stabilizacji - w procesie regulacji mają za zadanie utrzymać stałą (w czasie) wartość wielkości
wyjściowej mimo zmian wielkości wejściowej i działających na układ zakłóceń.
-
układy śledzące
(
nadążne
) - działają w taki sposób, aby sygnał wielkości wyjściowej nadążał za
zmianami wielkości wejściowej. Zmiany sygnałów wejściowych nie są znanie ani przewidywalne: są
losową funkcją czasu. Układy te są również nazywanie serwomechanizmami.
-
układy programowalne - są odmianą układów śledzących z tą różnicą, że sygnał wejściowy jest z
góry określoną (znaną) funkcją czasu.
-
układy optymalne - struktura i parametry regulatora określone są na podstawie obliczonego
ekstremum przyjętego wskaźnika jakości. Przykładem takiego układu może być układ sterowania
ciągiem silników tak, aby samolot osiągnął określony pułap, przy minimalizacji wskaźnika jakości,
którym jest zużycie paliwa.
-
układy przełączające - regulacja odbywa się na zasadzie załączania lub wyłączania odpowiednich
urządzeń procesu w odpowiedniej kolejności (sekwencji), a rolę regulatora pełni najczęściej układ
logiczny. Rozróżnia się dwie grupy układów: kombinacyjne i sekwencyjne. Mówiąc krótko, układy
kombinacyjne to takie, w których stan sygnałów wyjściowych w danej chwili zależy tylko od stanu
sygnałów wejściowych w danej chwili. Układy sekwencyjne to takie, w których stan sygnałów
wyjściowych w danej chwili zależy od stanu sygnałów wejściowych w danej chwili oraz od stanu
sygnałów wyjściowych w chwili poprzedniej.
Wyszukiwarka
Podobne podstrony:
opracowanie pytan Automatyka
opracowanie pytan Automatyka
opracowanie pytan Automatyka
Nasze opracowanie pytań 1 40
Opracowanie pytań z anatomii
opracowanie pytań z optyki
Maszyny Elektryczne Opracowanie Pytań Na Egzamin
opracowanie pytan id 338374 Nieznany
opracowanie pytan karafiata
Opracowanie pytań 2 kolokwium
cw 3 broma opracowanie pytan 810
Nhip opracowanie pytan id 31802 Nieznany
filozofia opracowanie pytań
pytania egz ekonimak II, OPRACOWANIE PYTAŃ NA EGZAMIN
Zestaw 88 Kasia Goszczyńska, materiały farmacja, Materiały 3 rok, Od Ani, biochemia, biochemia, opra
opracowane zestawy, OPRACOWANIE PYTAŃ NA EGZAMIN
Opracowanie pytań MAMET METALE
więcej podobnych podstron