1
9. BADANIE SILNIKA BOCZNIKOWEGO
9. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z własnościami silnika bocznikowego oraz wyznaczenie
charakterystyk i sprawności badanego silnika.
9.1. Przebieg pomiarów
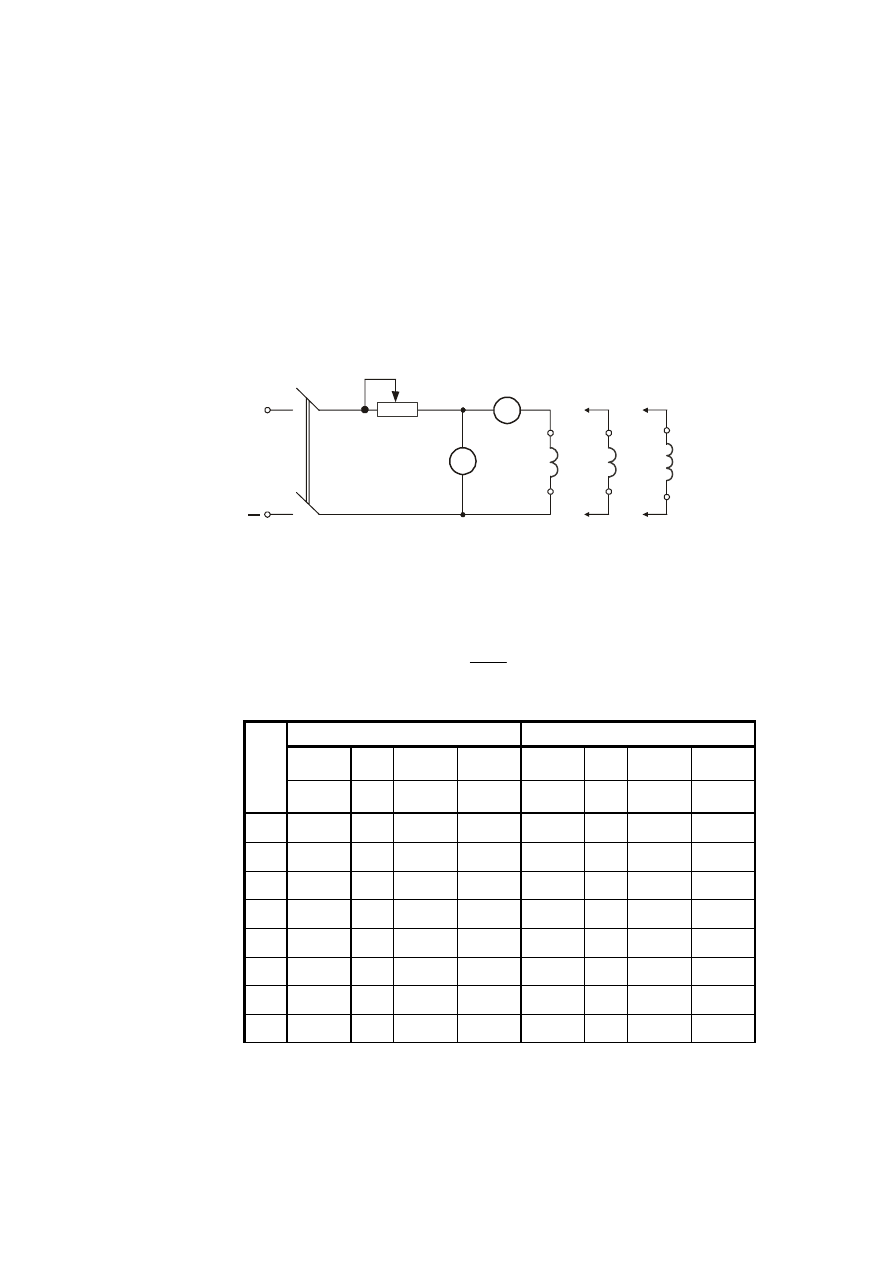
9.1.1. Pomiar rezystancji uzwojeń
Pomiaru rezystancji uzwojeń należy dokonać metodą techniczną według schematu przedstawionego na
rys.9.1.
A
R
E2
E1
B1
B2
V
A1
A2
+
Rys. 9.1. Schemat połączeń do pomiaru rezystancji: a/ uzwojenia bocznikowego, b/ uzwojenia twornika i
komutacyjnego
Badane uzwojenie zasila się napięciem stałym, wykonując po 3 pomiary dla obu uzwojeń. Wyniki
pomiarów zapisuje się do tabeli 9.1. i oblicza się wartość średnią rezystancji:
3
R
R
śr
∑
=
Tabela.9.1.
Uzwojenie bocznikowe
Uzwojenie twornika
U
a
I
R
śr
R
U
a
I
R
śr
R
L.p.
V A
Ω
Ω
V A
Ω
Ω
1
2
3
4
5
6
7
8
2
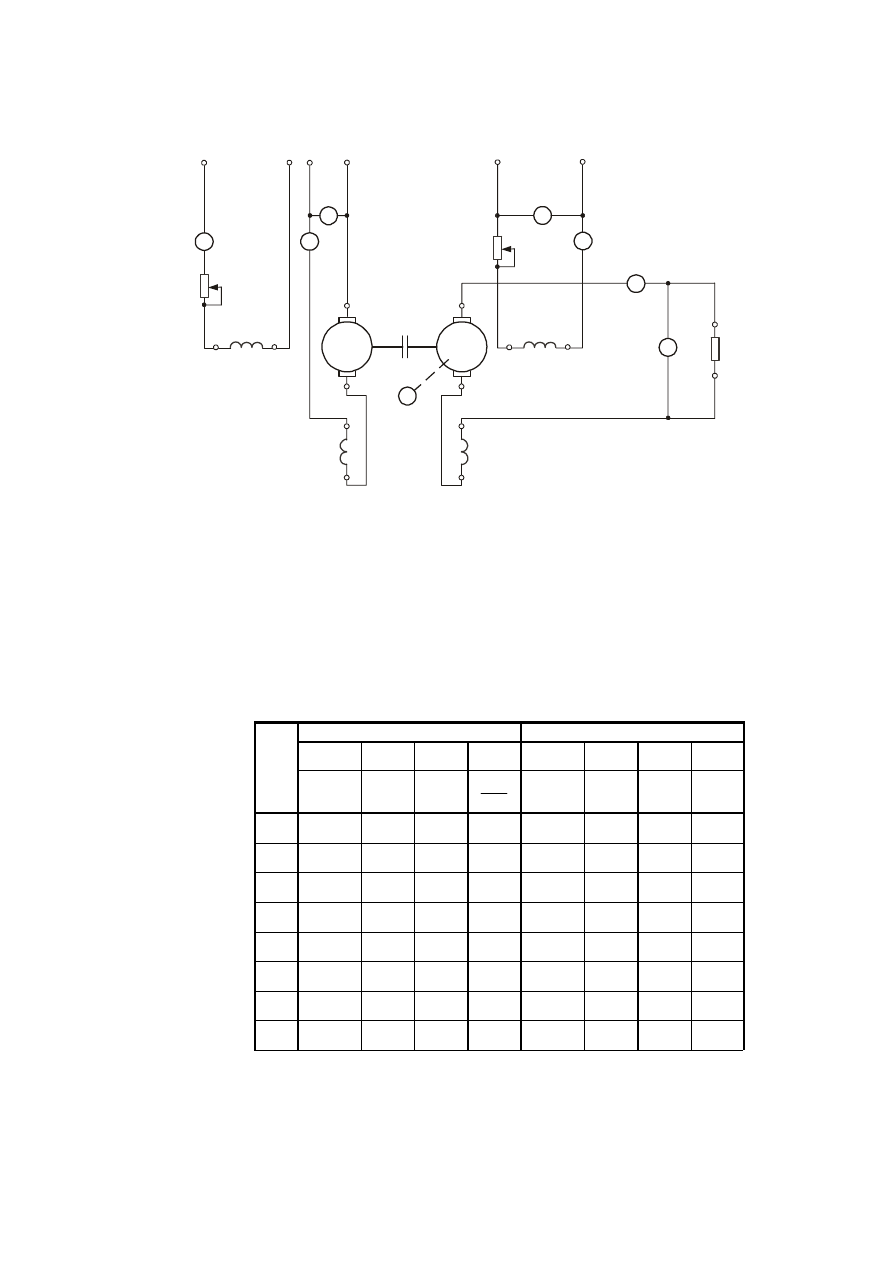
9.1.2. Wyznaczanie strat jałowych metodą biegu jałowego
Układ połączeń do wyznaczania strat jałowych metodą biegu silnikowego pokazany jest na rys.9.2.
V
V
n
0 220V =
÷
220V =
A
A
M
R
2
R
1
R
W
A1
A2
B1
B2
E2
E1
G
A1
A2
B1
B2
A
E2
E1
A
V
220V =
Rys.9.2. Schemat połączeń do badań silnika bocznikowego
Badany silnik nie powinien być sprzęgnięty z żadną maszyną. Pomiary wykonuje się dla stałej prędkości
obrotowej
. Prędkość obrotową reguluje się za pomocą zmiany prądu wzbudzenia
,
a napięcie zasilania
reguluje się przez zmianę przekładni transformatora prostownika zasilającego.
Pomiary wykonuje się zmieniając napięcie na zaciskach silnika od wartości
do wartości, przy
której prąd twornika będzie równy około
. Wyniki pomiarów wpisuje się do tabeli 9.2., oraz oblicza
się:
const
n
n
n
=
=
n
w
I
U
n
U
3
,
1
U
=
n
I
15
,
0
a
a
R
I
U
E
−
=
- siła elektromotoryczna
Tabela.9.2.
Pomiary Obliczenia
U
a
I
w
I
n
E
0
P
ea
P
∆
0
P
∆
L.p.
V A A
min
obr
V W W W
1
2
3
4
5
6
7
8
Wartość rezystancji twornika
przyjmuje się z pomiarów w pkt.9.1.1.
a
R
a
0
UI
P
=
- moc pobrana przez twornik
a
2
a
ea
R
I
P
=
∆
- straty na rezystancji
uzwojenia twornika
ea
0
0
P
P
P
∆
−
=
∆
- straty jałowe.
3
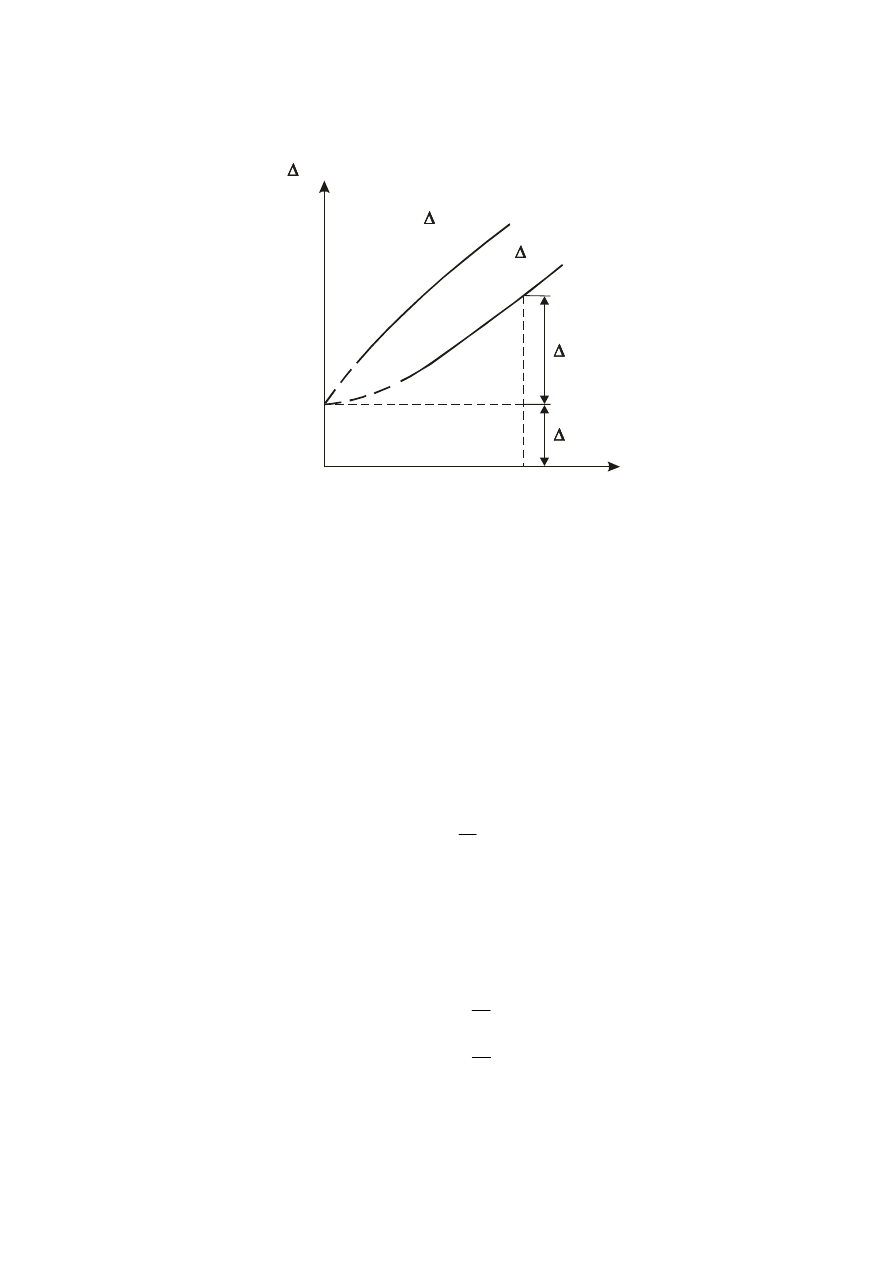
Straty jałowe
Fe
m
0
P
P
P
∆
+
∆
=
∆
są określone jako suma strat mechanicznych
i strat w żelazie
. Dla dokonania rozdziału strat jałowych wykreśla się charakterystykę
, która przetnie oś
rzędnych w punkcie odpowiadającym wielkości strat mechanicznych.
m
P
∆
Fe
P
∆
)
E
(
f
P
2
0
=
∆
P
0
U
n
P
f(E )
0
=
2
P
f(E)
0
=
E,E
2
P
m
P
fe
Rys.9.3. Wykres strat jałowych silnika bocznikowego
9.3.3. Charakterystyki robocze – n, I,
η=f(M
2
) przy U=U
n
; I
w
=I
wn
Układ do zdejmowania tej charakterystyki przedstawiony jest na rys.9.2. Silnik doprowadza się do punktu
pracy znamionowej za pomocą oporników
. Następnie zmniejszając obciążenie opornikiem
wodnym
i utrzymując stałą wartość prądu wzbudzenia silnika
w
2
1
R
,
R
,
R
w
R
const
I
w
=
, mierzy się napięcie
, prąd
twornika oraz prędkość obrotową . Wyniki pomiarów wpisuje się do tabeli 9.3. i oblicza się:
U
a
I
n
w
a
I
I
I
+
=
- prąd pobrany przez
silnik
a
a
R
I
U
E
−
=
- siła elektromotoryczna
silnika
a
2
a
ea
R
I
P
=
∆
- podstawowe straty
obciążeniowe
2
n
n
d
I
I
P
01
,
0
P
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
∆
- dodatkowe straty
obciążeniowe
w
w
UI
P
=
∆
- straty wzbudzenia
w
d
ea
0
P
P
P
P
P
∆
+
∆
+
∆
+
∆
=
∆
∑
- suma wszystkich strat
w
w
a
a
1
I
U
I
U
P
+
=
- moc pobrana z sieci
∑
∆
−
=
P
P
P
1
2
- moc oddana przez
silnik na wale
n
P
55
,
9
M
2
2
=
- moment obrotowy na
wale silnika
1
2
P
P
=
η
- sprawność silnika
4
Tabela.9.3.
Pomiary
U
a
I
w
I
n
Lp.
V A A
min
obr
1
2
3
4
5
6
7
8
Obliczenia
a
I
E
0
P
∆
ea
P
∆
W
P
∆
d
P
∆
∑
∆P
1
P
2
P
2
M
η
Lp.
A V W W W W W W
Nm -
1
2
3
4
5
6
7
8
W stanie ustalonym prędkość obrotowa silnika bocznikowego określona jest zależnością:
Φ
−
=
E
a
a
c
R
I
U
n
5
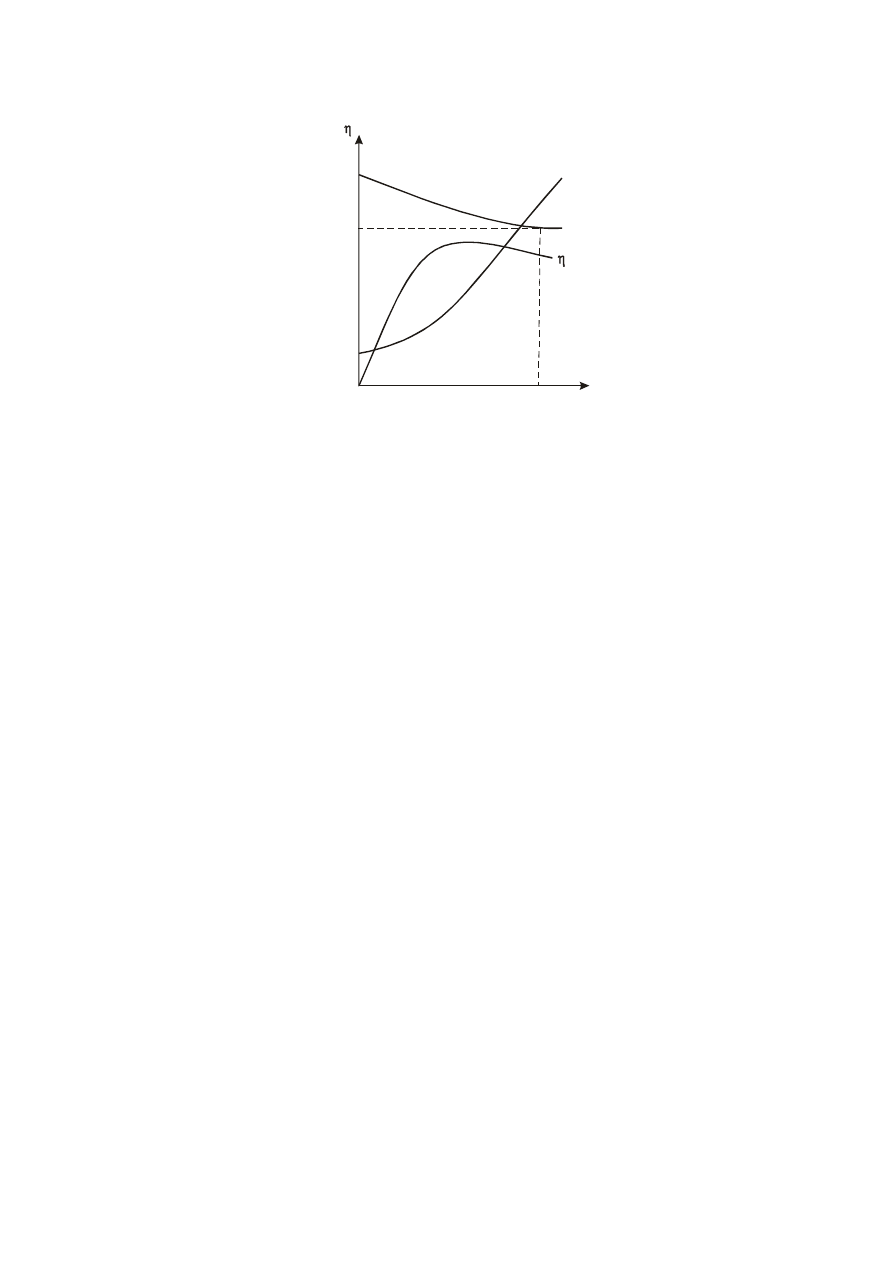
Charakterystyki robocze, czyli funkcje
)
M
(
I
,
n
2
=
oraz charakterystyka
)
M
(
f
2
=
η
przedstawione są na
rys.9.4
M
2n
I
n
0
n,I,
n
n
n
M
2
Rys.9.4. Charakterystyki robocze silnika bocznikowego
Jeżeli napięcie sieci
i strumień magnetyczny
Φ=const, tzn. prąd wzbudzenia
const
U
=
const
I
w
=
(przy pominięciu reakcji twornika), prędkość obrotowa silnika wynosi:
n
2
2
0
2
2
1
M
c
n
M
c
c
n
−
=
−
=
przy czym
- jest prędkością obrotową silnika w stanie jałowym. Widać zatem, że zależność
0
n
( )
2
M
f
n
=
jest w przybliżeniu linią prostą. Zgodnie ze wzorem
a
M
I
c
M
Φ
=
przy pominięciu reakcji twornika, prąd twornika ze wzrostem momentu rośnie prostoliniowo. Na skutek
reakcji twornika zmniejszającej strumień, wzrost prądu jest szybszy niż wynika to z zależności
prostoliniowej.
a
I
9.1.4. Charakterystyki regulacyjne n=f(U)
Charakterystykę regulacyjną
( )
U
f
n
=
wykonuje się przy stałej wartości prądu wzbudzenia
dla dwóch wartości momentu obciążenia na wale silnika:
const
I
I
wn
w
=
=
1. przy biegu jałowym
;
0
M
2
=
2. przy obciążeniu
n
2
2
M
5
,
0
M
≈
.
Przy zdejmowaniu charakterystyki dla
0
M
2
=
prądnica napędzana przez silnik jest niewzbudzona,
natomiast przy zdejmowaniu charakterystyki dla
n
2
2
M
5
,
0
M
=
prądnica jest obciążona tak, aby prąd
twornika silnika był stały o wartości równej
n
I
5
,
0
I
=
. Odpowiada to w przybliżeniu stałej wartości
momentu
. Pomiary wykonuje się według układu pomiarowego przedstawionego na rys.9.2
przy zmieniającym się napięciu zasilania
od zera do wartości 1,1
. Na podstawie pomiarów
zestawionych w tabeli 9.4 wykreśla się charakterystyki n=f(U) przy
n
2
2
M
5
,
0
M
=
U
n
U
const
I
I
wn
w
=
=
.
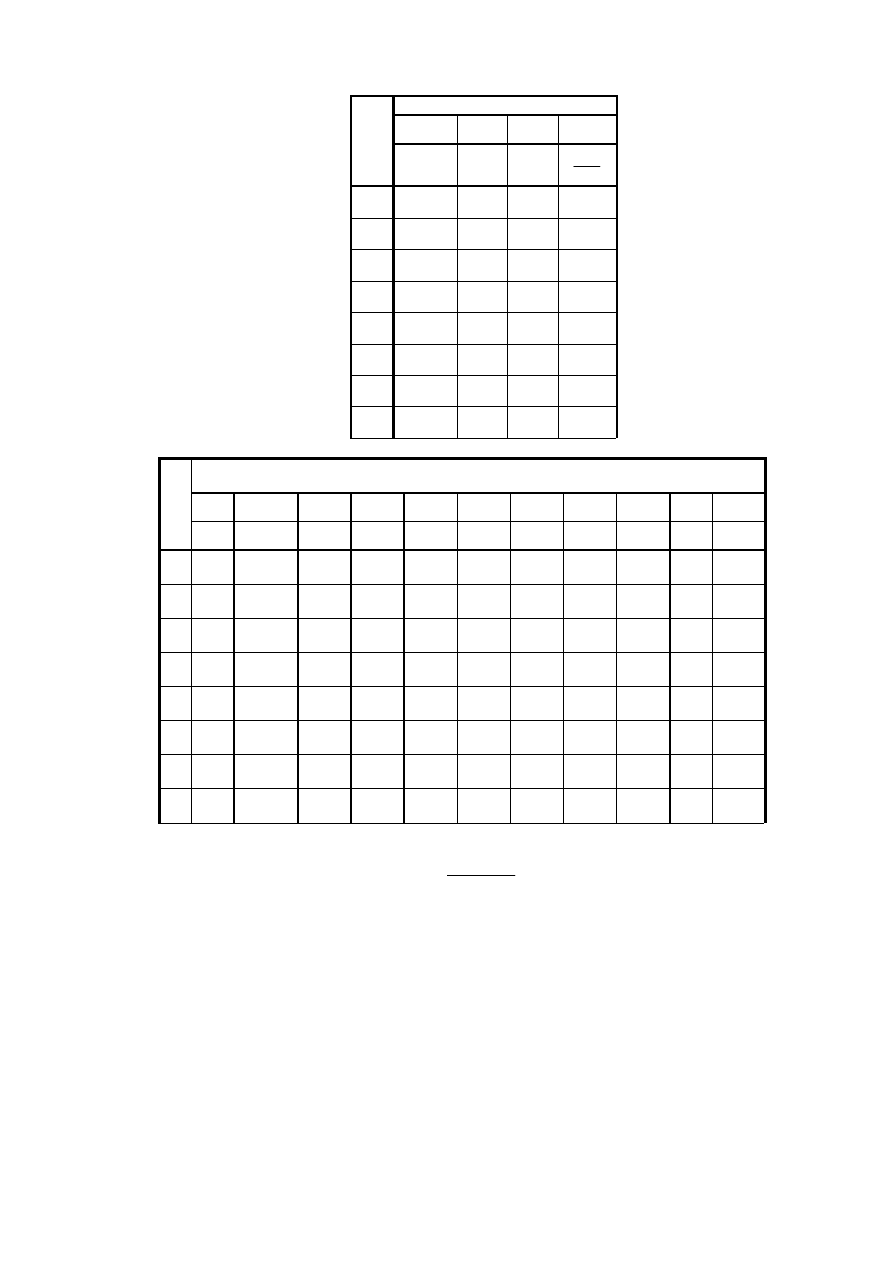
6
Tabela.9.4.
0
M
2
=
n
2
2
M
5
,
0
M
=
U
n
w
I
U
n
w
I
Lp.
V
min.
obr.
A V
min.
obr.
A
1
2
3
4
5
6
7
8
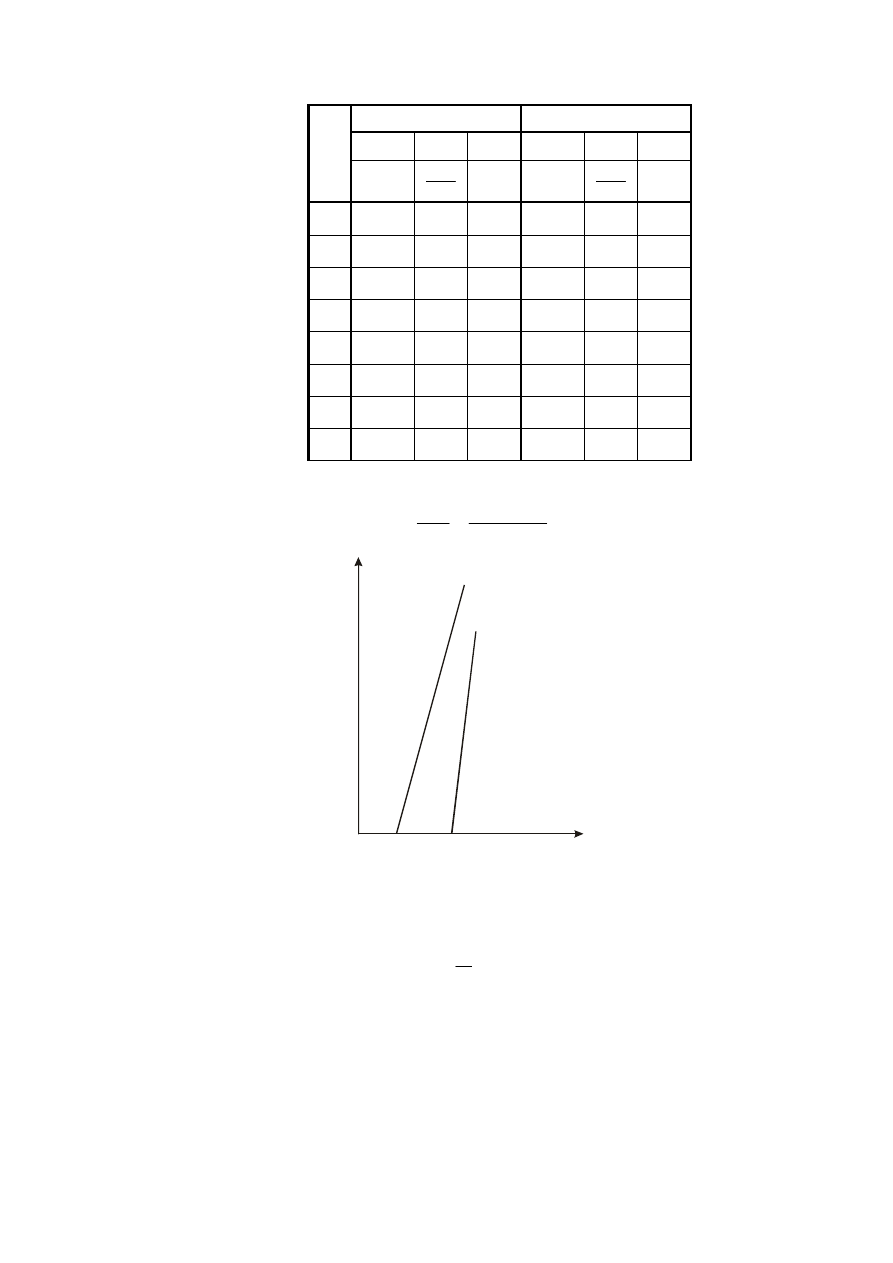
Korzystając z zależności
Φ
⋅
−
=
Φ
=
E
a
a
E
c
R
I
U
c
E
n
M =0,5
2
M
2n
n
M =0
2
U
Rys.9.5. Charakterystyki obciążenia silnika bocznikowego n=f(U),
const
M
=
oraz biorąc pod uwagę
i
const
I
a
=
const
=
Φ
(nie uwzględniając oddziaływania twornika) równanie to
można zapisać w postaci
2
1
c
c
U
n
−
=
,
a zatem jest to równanie linii prostej. Większy kąt nachylenia charakterystyki n=f(U) dla
n
2
2
M
5
,
0
M
=
wynika z występowania oddziaływania twornika przy obciążeniu (dla
0
I
a
≠
).
9.1.5. Charakterystyki regulacyjne n-f(I
w
)
Charakterystyki regulacyjne
wykonuje się przy napięciu
( )
w
I
f
n
=
const
U
U
n
=
=
dla dwóch stałych
wartości momentu obrotowego silnika, określonych w punkcie 9.1.4. Układ połączeń silnika przedstawiony
jest na rys.9.2. Próbę wykonuje się od wartości maksymalnej prądu wzbudzenia
do wartości
w
I
min
w
w
I
I
=
,
przy której prędkość obrotowa silnika osiąga wartość
n
n
5
,
1
n
=
. Na podstawie pomiarów zestawionych
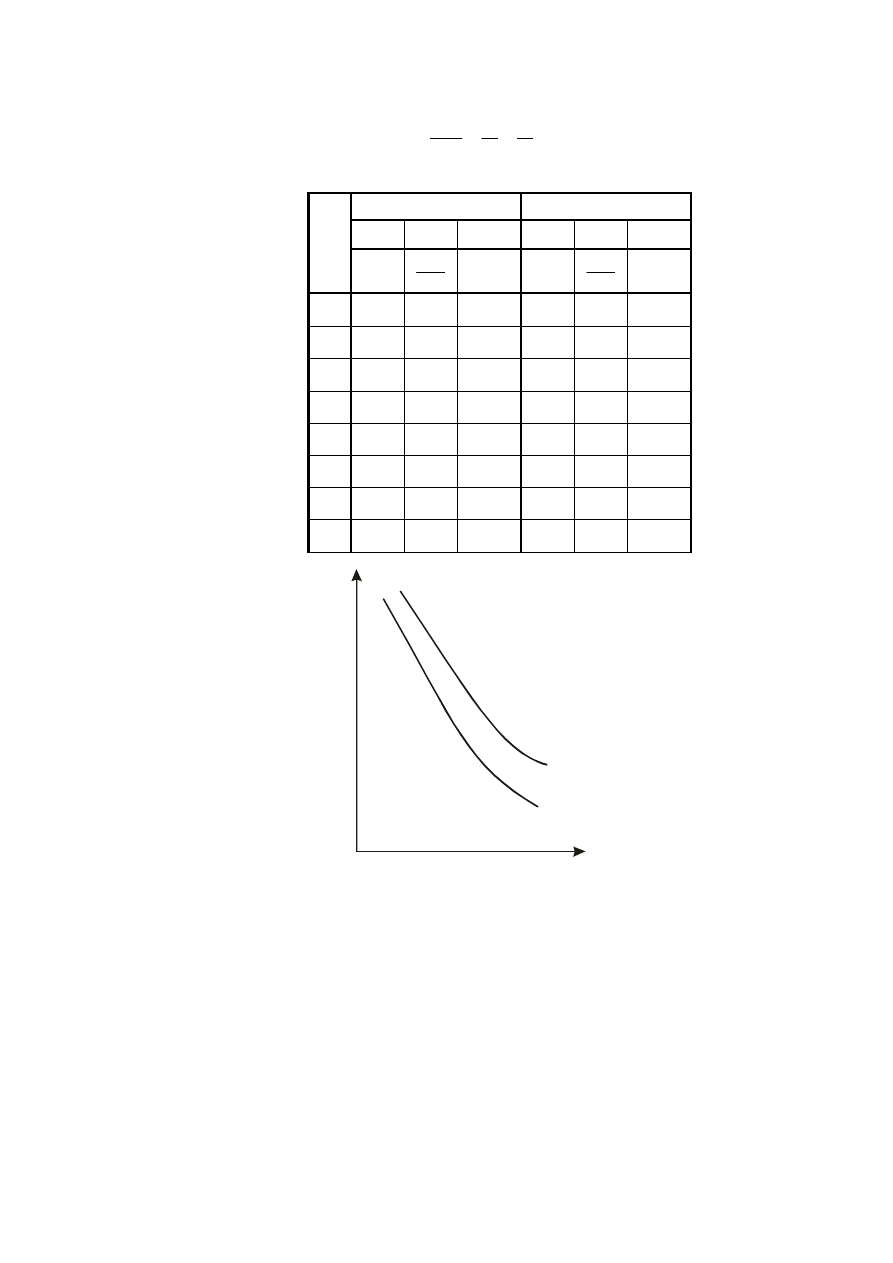
7
w tabeli 9.5 wykreśla się charakterystyki
( )
w
I
f
n
=
przy
const
U
U
n
=
=
. Przebieg krzywych
( )
w
I
f
n
=
jest zbliżony do hiperboli o równaniu
f
1
E
I
c
c
c
E
n
≈
Φ
=
Φ
=
Tabela.9.5.
0
M
2
=
n
2
2
M
5
,
0
M
=
w
I
n
U
w
I
n
U
Lp.
A
min.
obr.
V A
min.
obr.
V
1
2
3
4
5
6
7
8
M =0,5
2
M
2n
n
M =0
2
I
w
Rys.9.6. Charakterystyki obciążenia silnika bocznikowego
( )
w
I
f
n
=
,
const
U
=
Ze względu na przebieg charakterystyki
( )
w
I
f
=
Φ
oraz ze względu na oddziaływanie twornika
rzeczywisty przebieg tylko w przybliżeniu jest hiperbolą.
9.4. Sprawozdanie
Sprawozdanie powinno zawierać:
• dane znamionowe badanej maszyny
• wyznaczenie wszystkich strat silnika bocznikowego
• charakterystyki robocze
• charakterystyki prędkości obrotowej
• obliczenia sprawności
•
wnioski i spostrzeżenia.
Document Outline
Wyszukiwarka
Podobne podstrony:
Badanie silnika indukcyjnego A4 Nieznany (2)
Badanie silnika szeregowego A4 Nieznany (2)
badanie silnika bocznikowego
Badanie silnika indukcyjnego je Nieznany
Badanie silnika pierścieniowego A4
SILNIK BOCZNIKOWY- 3.2 moje, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.
Badanie silnika bocznikowego
3, Inzynieria Materiałowa, I semestr, Elektrotechnika, elektrotechnika, 3.2 BADANIE SILNIKA BOCZNIKO
Badanie silnika bocznikowego prądu stałego
Badanie silnika bocznikowego Grupa KACZORUK RURAŻ BIEG BUSIUK
Badanie silnika szeregowo-bocznikowego prądu stałego v2
Badanie silnika szeregowo-bocznikowego prądu stałego, Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika szeregowo bocznikowego prądu stałego
Badanie właściwości silnika bocznikowego, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok
Badanie maszyn pradu stalego silnika bocznikowgo i pradnicy (2)
Badanie silnika szeregowo bocznikowego prądu stałego
więcej podobnych podstron