
1
3. BADANIE SILNIKA KLATKOWEGO
Wiadomości wstępne
Do maszyn indukcyjnych należy duża grupa maszyn o różnych konstrukcjach przeznaczonych do
wypełniania różnorodnych zadań. Najszerzej stosowane są maszyny trójfazowe wykonywane w bardzo
szerokim przedziale mocy znamionowych, od dziesiątych części kilowata do kilku, a nawet kilkunastu
megawatów. Maszyny asynchroniczne pracują najczęściej jako silniki.
Silnik indukcyjny posiada symetryczne uzwojenie stojana o p parach biegunów, które zasilane jest
napięciem trójfazowym symetrycznym o częstotliwości f
1
. Powstaje w tych warunkach pole magnetyczne
kołowe wirujące względem stojana z prędkością synchroniczną:
p
f
60
n
1
1
=
Linie sił wirującego pola magnetycznego przecinają symetryczne uzwojenie wirnika, indukując w nim
siły elektromotoryczne, które powodują przepływ prądu w tym uzwojeniu. Na przewody z prądem działa siła
elektrodynamiczna wprowadzająca w ruch wirnik maszyny indukcyjnej. Przy pracy silnikowej wirnik wiruje
w kierunku zgodnym z kierunkiem wirowania z prędkością n mniejszą od prędkości obrotowej pola
magnetycznego n
1
. Pole stojana wiruje względem wirnika z prędkością
0
n
n
1
≠
−
i indukuje w wirniku siły
elektromotoryczne o częstotliwości:
(
)
60
n
n
p
f
1
2
−
=
Po uwzględnieniu wyrażenia na poślizg:
1
1
n
n
n
s
−
=
otrzymuje się związek między częstotliwością prądów płynących w stojanie f
1
i w wirniku f
2
:
s
f
f
1
2
=
Silniki indukcyjne są budowane jako klatkowe i pierścieniowe. Zasada działania tych silników jest taka
sama, a różnica polega jedynie na wykonaniu wirnika. Uzwojenie wirnika silnika pierścieniowego wykonane
jest podobnie jak uzwojenie stojana. Końce trzech faz uzwojenia są zwarte, a ich początki doprowadzone do
pierścieni ślizgowych znajdujących się na wale silnika. Dzięki temu można włączać rezystancje potrzebne
do rozruchu i regulacji prędkości obrotowej.
W silniku klatkowym obwód wirnika wykonany jest ze zwartych prętów, co uniemożliwia poprawę
warunków rozruchowych przez wprowadzenie w obwód wirnika rozrusznika. Ze względu na małą
rezystancję wirnika prąd rozruchowy jest duży (3-7 I
N
), co jest obok małego momentu rozruchowego wadą
tego silnika. Warunki rozruchu można poprawić poprzez wykonanie silnika jako głębokożłobkowego lub
dwuklatkowego, albo też poprzez odpowiedni rozruch silnika (przełącznik gwiazda-trójkąt;
autotransformator; oporniki rozruchowe; energoelektroniczne urządzenia miękkiego rozruchu; przemienniki
częstotliwości).
3.1. Cel ćwiczenia
Przedmiotem badań jest silnik indukcyjny klatkowy, przystosowany do sieci zasilającej 3 x 380V.
Uzwojenie tego silnika jest wyprowadzone do tablicy z sześcioma zaciskami, umożliwiające połączenie
stojana w gwiazdę lub trójkąt. (Roboczym połączeniem uzwojenia stojana jest trójkąt). Celem ćwiczenia jest
zapoznanie się z pracą silnika klatkowego w stanach: jałowym, zwarcia ustalonego, obciążenia oraz
wyznaczenie charakterystyk tego silnika.
3.2. Dane znamionowe silnika
Przed rozpoczęciem ćwiczenia należy zapoznać się z charakterystycznymi danymi silnika umieszczonymi
na tabliczce znamionowej oraz dokonać oględzin zewnętrznych.
2
3.3. Przebieg pomiarów
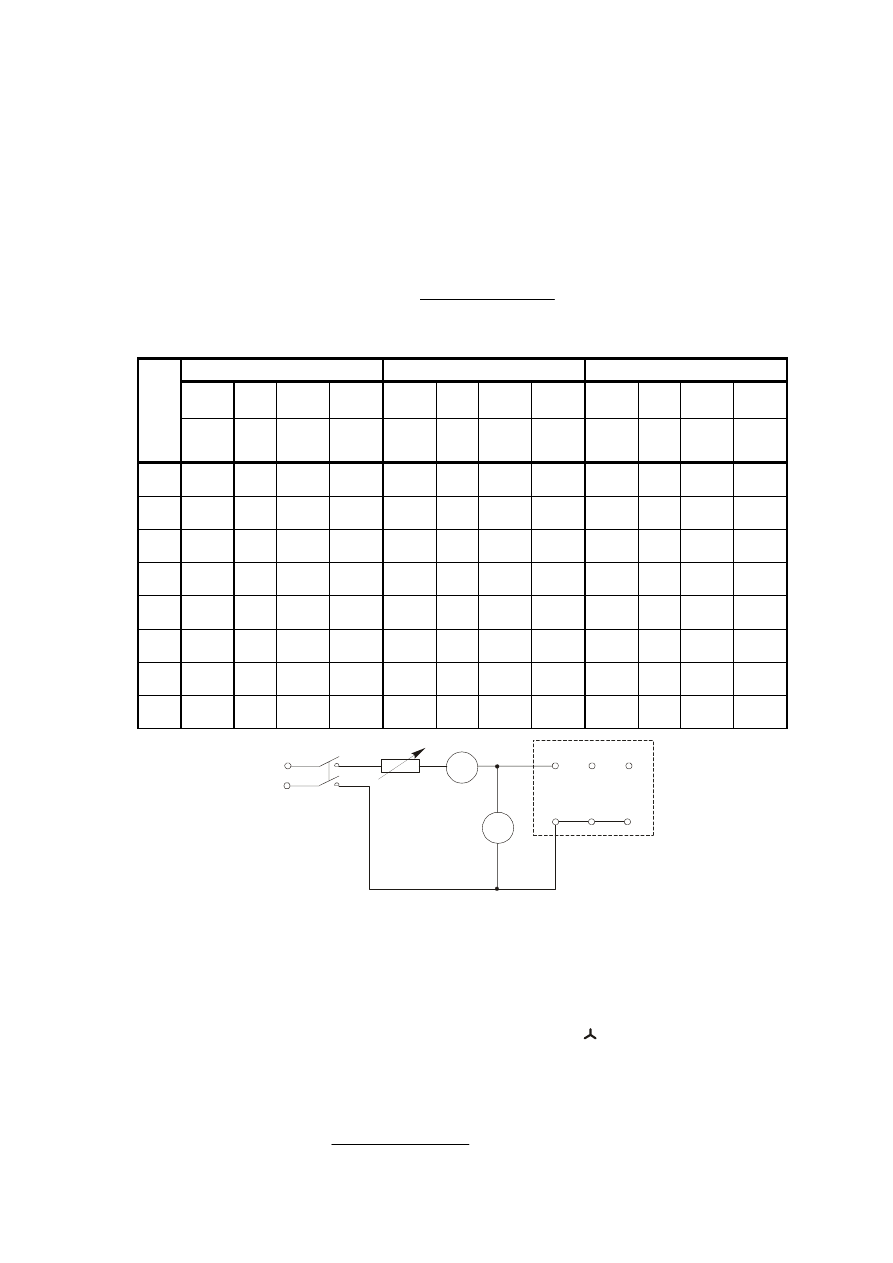
3.3.1. Pomiar rezystancji uzwojeń stojana
Rezystancję uzwojeń stojana mierzy się metodą techniczną według schematu przedstawionego na rys.3.1.
Badane uzwojenie zasila się napięciem stałym. Rezystorem regulacyjnym ustala się wartość prądu płynącego
przez uzwojenie tak, aby nie przekroczył wartości 0,3 I
N
. Dla każdej fazy stojana wykonuje się trzy pomiary
dla różnych wartości prądu. Oblicza się średnie wartości rezystancji dla każdej fazy oraz średnią wartość
rezystancji fazowej stojana R jako średnią, ze wszystkich faz. Wyniki pomiarów i obliczeń wpisuje się do
tabeli 3.1. gdzie :
f
3
R
R
R
R
Wsr
Vsr
Usr
f
+
+
=
Tabela 3.1.
Faza U
Faza V
Faza W
U I R
U
R
Uśr
U I R
V
R
Vśr
U I R
W
R
Wśr
Lp.
V A
Ω
Ω
V A
Ω
Ω
V A
Ω
Ω
1
2
3
4
5
6
7
8
V
A
R
U1
V1
W1
U2
V2
W2
+
-
Rys. 3.1. Schemat połączeń do pomiaru rezystancji uzwojeń silnika klatkowego
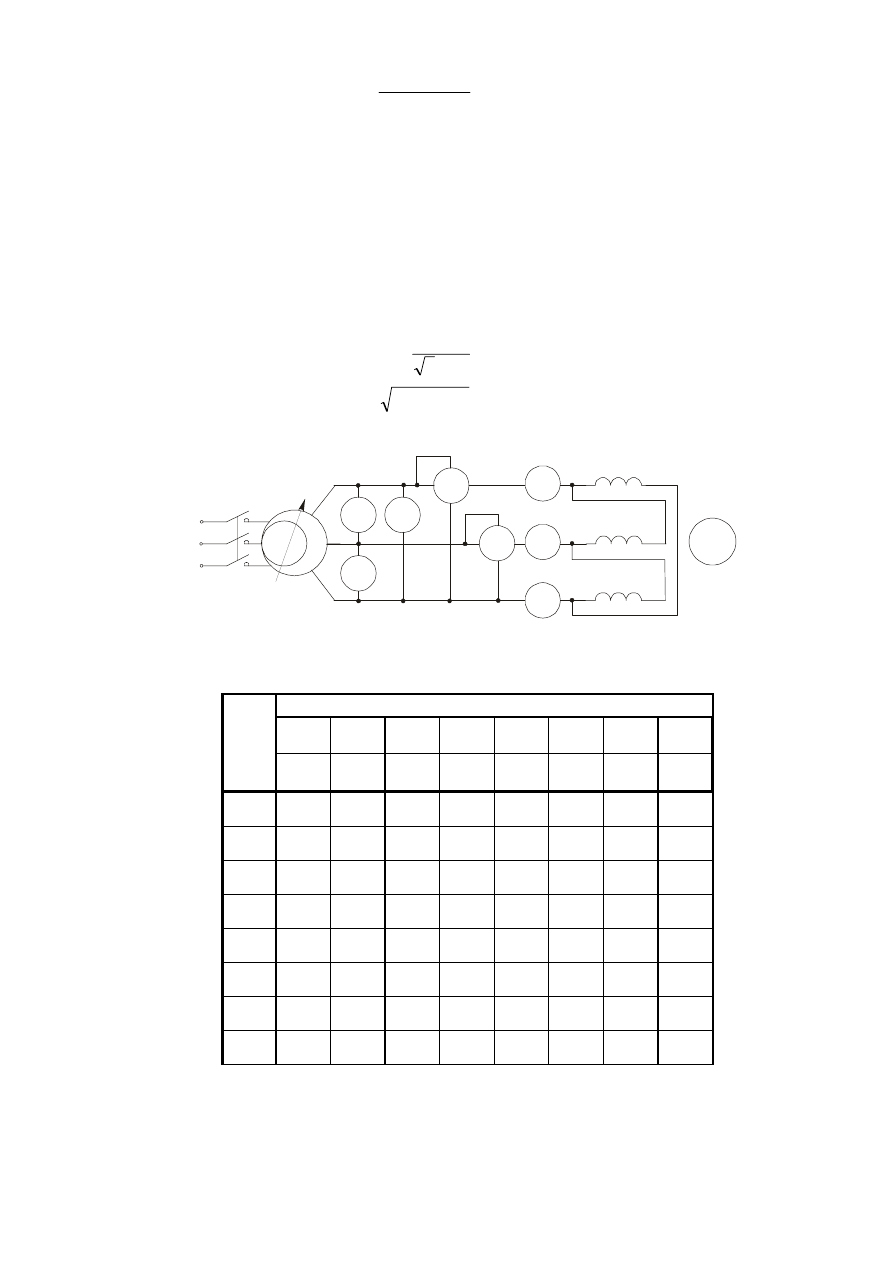
3.3.2. Próba biegu jałowego
W próbie biegu jałowego mierzymy prąd, napięcie, moc i prędkość obrotową silnika. Próba ta pozwala
określić współczynnik mocy, straty jałowe i rozdzielić je na straty mechaniczne oraz straty w rdzeniu. Silnik
jest nieobciążony, a jego uzwojenie, połączone w układ roboczy (
lub
∆
) zasila się regulowanym
napięciem. Pomiar przeprowadza się po dokonaniu rozruchu, zmieniając napięcie od wartości 1,3 U
N
do
takiej, przy której prąd zaczyna ponownie wzrastać. Schemat połączeń podany jest na rysunku 3.2.
Wartości zmierzone i obliczone wpisuje się do tabeli 3.2., gdzie :
3
U
U
U
U
WU
VW
UV
0
+
+
=
- średnia wartość napięcia
3
3
I
I
I
I
W
V
U
0
+
+
=
- średnia wartość prądu
biegu jałowego
β
α
±
=
P
P
P
0
- moc czynna przy biegu
jałowym
1
cu
0
Fe
m
0
P
P
P
P
P
∆
−
=
∆
+
∆
=
∆
- straty biegu jałowego
2
0
f
1
cu
I
R
3
P
=
∆
- straty w uzwojeniach
stojana
m
P
∆
- straty mechaniczne
Fe
P
∆
- straty w rdzeniu stojana
0
0
w
0
cos
I
I
ϕ
=
- prąd czynny biegu
jałowego
0
0
0
0
I
U
3
P
cos
=
ϕ
0
2
0
cos
1
sin
ϕ
−
=
ϕ
- współczynnik mocy biegu
jałowego
0
0
sin
I
I
ϕ
=
µ
- prąd magnesujący
V
V
V
A
A
A
U1
U2
W1
W2
V1
V2
W
β
*
*
W
α
*
*
WIRNIK
RI
L1
L2
L3
Rys. 3.2. Schemat połączeń do próby biegu jałowego silnika klatkowego.
Tabela 3.2.
Pomiary
U
UV
U
VW
U
WU
I
U
I
V
I
W
P
α
P
β
Lp.
V V V A A A W W
1
2
3
4
5
6
7
8
4
Obliczenia
U
0
I
0
P
0
cos
ϕ
0
sin
ϕ
0
I
0w
I
µ
∆P
cu
∆P
0
Lp.
V A W - - A A W W
1
2
3
4
5
6
7
8
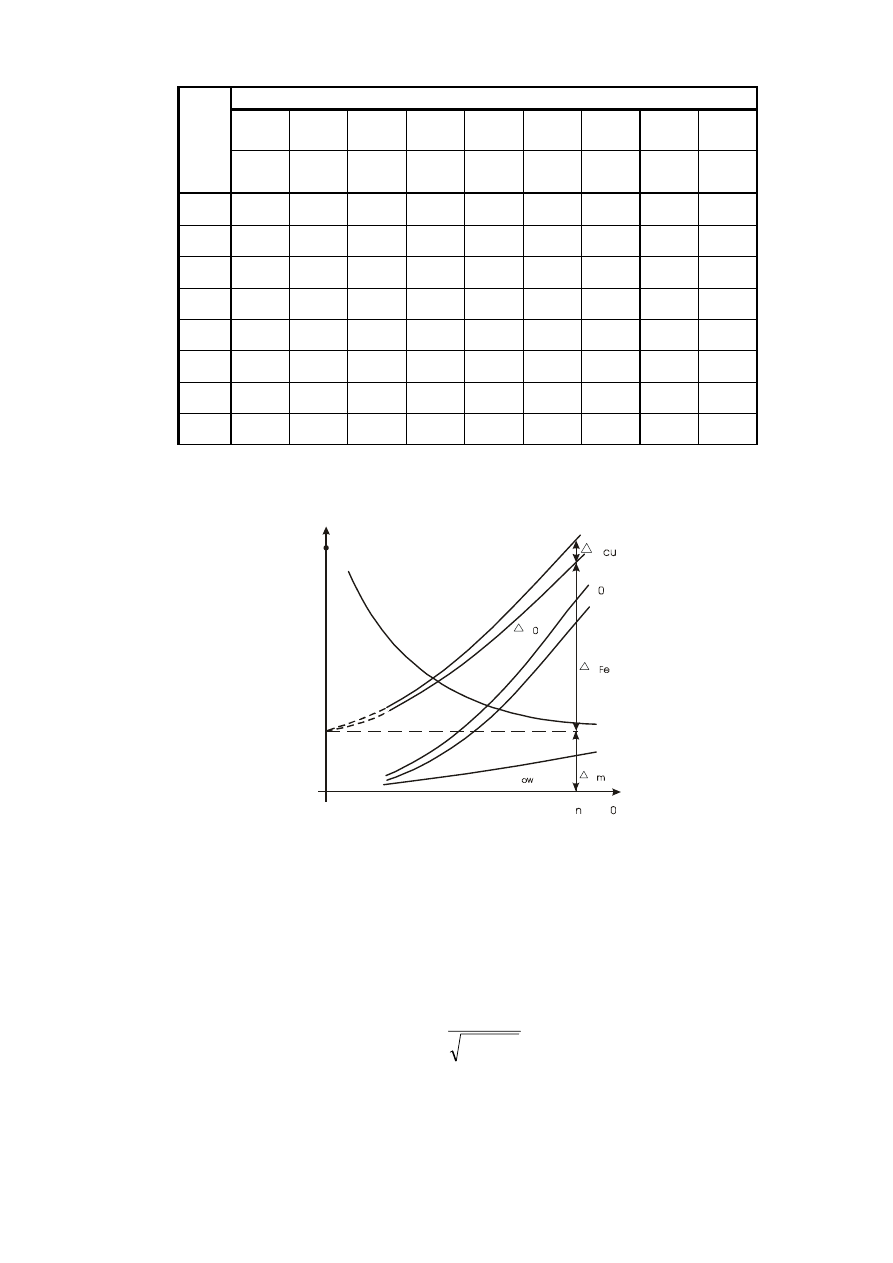
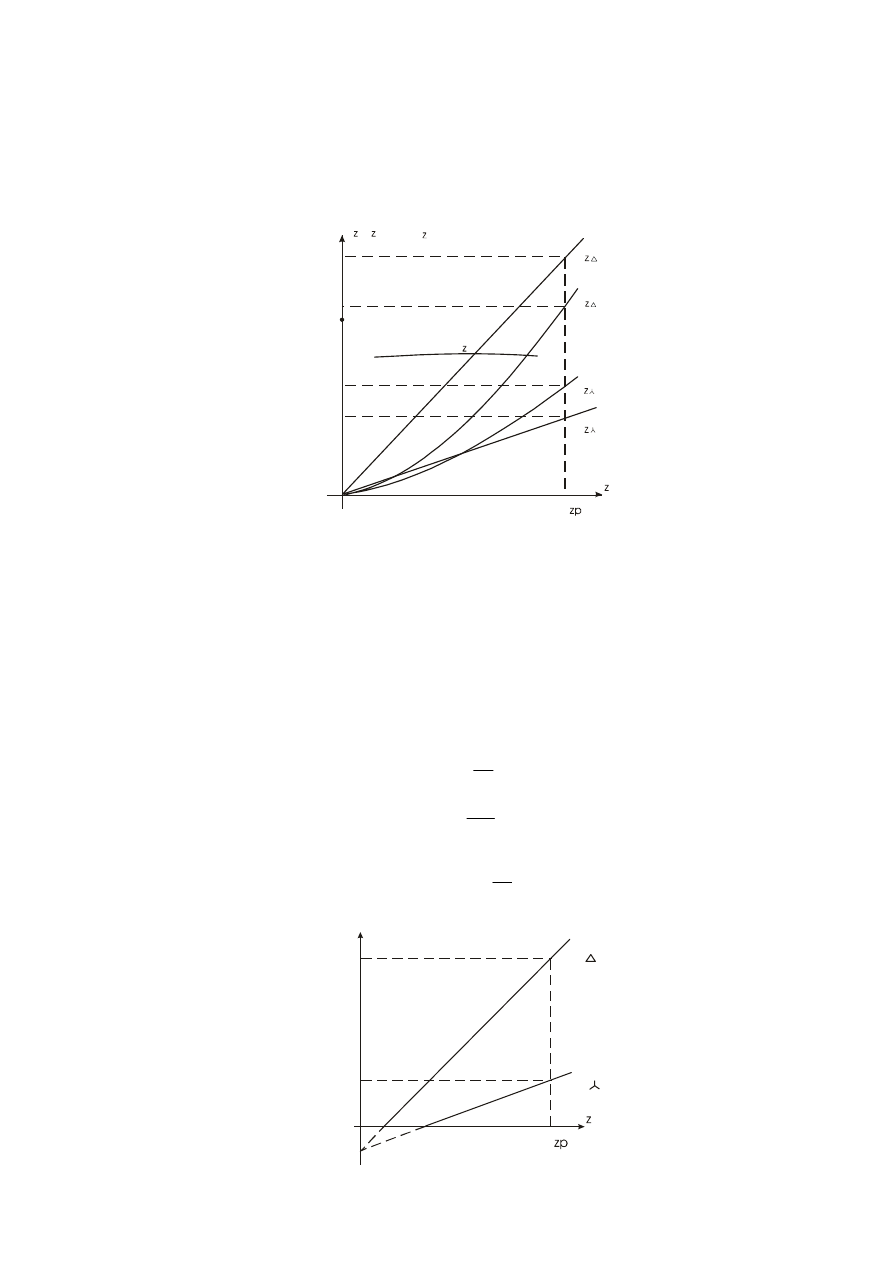
Charakterystyki biegu jałowego są przedstawione na rysunku 3.3.
I
U
U
I
P
P
P
P
I
µ
1
I ; P; cos
0
0
ϕ
0
cos
ϕ
0
P
0
Rys. 3.3. Charakterystyki biegu jałowego silnika indukcyjnego
Krzywa
jest w przybliżeniu parabolą przesuniętą wzdłuż osi rzędnych o stałą wartość
, gdyż straty w rdzeniu są proporcjonalne w przybliżeniu do kwadratu napięcia, natomiast z powodu
stałej prędkości
Prąd magnesujący w funkcji napięcia
/
U
/
f
P
0
0
=
∆
m
P
∆
const
P
m
≈
∆
/
U
/
f
I
0
=
µ
, zmienia się według
krzywej magnesowania. Przebieg tego prądu w praktyce pokrywa się z przebiegiem prądu jałowego
, gdyż składowa czynna
jest bardzo mała. Ze wzrostem napięcia składowa czynna prądu
rośnie wolno, a prąd magnesujący
szybko, wobec czego:
/
U
/
f
I
0
0
=
w
0
I
w
0
I
µ
I
2
2
w
0
w
0
0
I
I
I
cos
µ
+
=
ϕ
maleje.
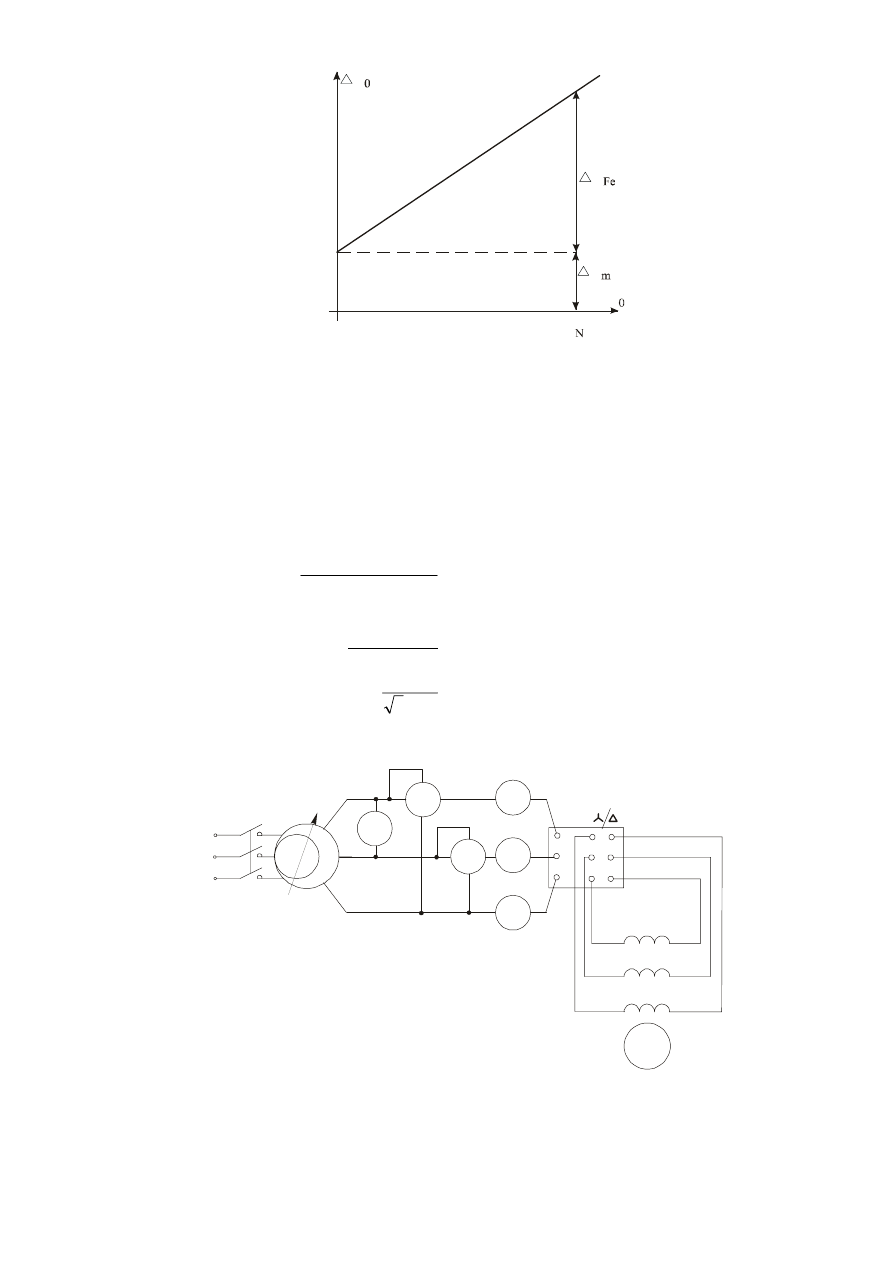
Na rysunku 3.4. przedstawiona jest charakterystyka
. Służy ona do rozdzielenia strat
mechanicznych i strat w rdzeniu.
/
U
/
f
P
2
0
0
=
Dla silników asynchronicznych przyjmuje się, że straty mechaniczne są stałe, praktycznie równe stratom
mechanicznym przy obciążeniu. Ponieważ straty w rdzeniu są proporcjonalne do kwadratu napięcia, to
w funkcji kwadratu napięcia przebieg strat jałowych jest linią prostą.
5
U
P
P
P
2
U
2
Rys. 3.4. Rozdział strat jałowych silnika indukcyjnego
3.3.3. Próba zwarcia ustalonego
Próbę zwarcia silnika przeprowadza się, doprowadzając do uzwojeń stojana (przy zahamowanym
wirniku) obniżone napięcie do wartości, przy której prąd ma wartość około I
N
. Próbę tę należy wykonać
możliwie szybko, aby można było pominąć wpływ nagrzewania się uzwojeń. Próbę przeprowadza się dla:
- uzwojeń stojana połączonych w gwiazdę
- uzwojeń stojana połączonych w trójkąt.
Schemat połączeń podany jest na rysunku 3.5.
Wyniki pomiarów i obliczeń wpisuje się do tabeli 3.3., gdzie:
3
U
U
U
U
VW
UW
UV
z
+
+
=
- wartość napięcia zwarcia
β
α
±
=
P
P
P
z
- moc czynna zwarcia
3
I
I
I
I
W
V
U
z
+
+
=
- wartość prądu zwarcia
z
z
z
z
I
U
3
P
cos
=
ϕ
- zwarciowy współczynnik
mocy
Fl
81
,
9
M
p
=
- wartość momentu
początkowego
V
A
A
A
U1
U2
W1
W2
V1
V2
W
β
*
*
W
α
*
*
WIRNIK
RI
L1
L2
L3
Przełącznik
ręczny
Rys. 3.5. Schemat połączeń do badań silnika indukcyjnego
W celu wyznaczenia momentu początkowego do wału silnika mocuje się dźwignię, której drugi koniec
opiera się o szalkę wagi. Każdorazowo po zmianie napięcia zasilającego równoważy się dźwignię siłą F.
Należy zmierzyć i zanotować długość ramienia dźwigni l. Ponieważ na wartość początkowego momentu
rozruchowego wpływa wzajemne położenie stojana i wirnika - pomiar siły należy powtórzyć przy kilku
6
położeniach wirnika i jako wynik przyjąć wartość średnią. Przy założeniu prostoliniowego przebiegu prądów
zwarcia należy obliczyć prąd i moc zwarcia przy napięciu znamionowym:
Charakterystyki stanu zwarcia przedstawione są na rysunku 3.6.
zp
2
zp
2
n
zn
zp
zp
n
zn
P
U
U
P
I
U
U
I
=
=
gdzie:
Zp
Zp
P
i
I
- prąd i moc zwarcia zmierzone przy napięciu
.
Zp
U
Ponadto należy określić krotność prądu rozruchowego przy połączeniu w gwiazdę i trójkąt:
λ
∆
λ
∆
zn
zn
n
zn
n
zn
I
I
oraz
I
I
;
I
I
Tabela 3.3.
Pomiary
U
UV
U
VW
U
WU
I
U
I
V
I
W
P
α
P
β
F
Lp.
V V V A A A W W kG
1
2
3
4
5
6
7
8
Obliczenia
U
Z
I
Z
P
Z
cos
ϕ
Z
∆P
cu
M
r
Lp.
V A W - W Nm
1
2
3
4
5
6
7
8
7
Prąd zwarcia silnika ma przebieg prostoliniowy. Jest to słuszne przy założeniu stałej wartości impedancji
silnika. W przybliżonych pomiarach zakłada się stałość impedancji. Ze względu na małe straty w rdzeniu
przy zwarciu silnika (małe napięcie i mała indukcja) i brak strat mechanicznych przyjmuje się, że cała moc
pobrana w tym stanie pokrywa straty obciążeniowe zależne od kwadratu prądu, a więc i od kwadratu
napięcia. Otrzymuje się więc paraboliczny przebieg
( )
z
z
U
f
P
=
. Współczynnik mocy zwarcia
z
cos
ϕ
można
uważać za wartość stałą, zakładając stałość reaktancji zwarciowej. Przy zastosowaniu przełącznika gwiazda -
trójkąt uzyskuje się trzykrotne zmniejszenie prądu pobieranego z sieci.
I
I
I
U
U
P
P
P
cos
ϕ
cosϕ
; ;
1
Rys. 3.6. Charakterystyki zwarcia silnika klatkowego dla dwóch skojarzeń faz stojana
3.3.4. Wyznaczanie początkowego momentu rozruchowego
Na podstawie obliczeń przeprowadzonych w punkcie 3.3.3. i ujętych w tabeli 3.3. wykreśla się zależność
( )
2
z
r
U
f
M
=
przy zasilaniu stojana silnika w gwiazdę i w trójkąt. Charakterystyki rozruchowe przedstawione
są na rysunku 3.7. Wyznaczając dla danego
z charakterystyki zwarcia (rys.3.6.) prąd zwarcia
oraz dla tej samej wartości napięcia
wartość momentu początkowego
z charakterystyki rozruchowej (rys. 3.7.), można określić rozruchowy moment początkowy przy napięciu
znamionowym dla dwóch skojarzeń faz: w gwiazdę i trójkąt.
zp
U
∆
λ
zp
zp
I
i
I
zp
U
∆
λ
rp
rp
M
i
M
rp
2
zp
zn
rn
M
I
I
M
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
oraz krotność rozruchowego momentu początkowego
n
rn
M
M
gdzie:
n
n
n
n
P
55
,
9
M
=
U
2
U
2
M
M
M
M
r
r
r
Rys. 3. 7. Charakterystyki rozruchowe silnika klatkowego przy skojarzeniu faz stojana w gwiazdę i w trójkąt
8
Przez zastosowanie przełącznika gwiazda - trójkąt uzyskuje się trzykrotne zmniejszenie momentu
rozruchowego. Moment silnika jest proporcjonalny do kwadratu napięcia, a więc:
3
1
U
3
U
M
M
2
z
2
z
r
r
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
∆
λ
3.3.5. Próba obciążenia silnika klatkowego.
Próbę obciążenia wykonuje się w układzie połączeń silnika według rysunku 3.5. przy połączeniu uzwojeń
w gwiazdę i trójkąt, przy stałym napięciu zasilania równym znamionowemu. Silnik obciążamy hamulcem
bębnowym. Pomiary przeprowadza się dla prądów w zakresie 0
−1,3I
n
. Wyniki pomiarów i obliczeń wpisuje
się w tabeli 3.4.,
Tabela 3.4.
Pomiary
U
1
I
1
P
α
P
β
F
1
F
2
n
Lp.
V A W W kG
kG
obr/min
1
2
3
4
5
6
7
8
Obliczenia
P
1
P
2
F M
2
cos
ϕ
η
I
1
/I
n
P
2
/P
n
Lp.
W
W
kG
Nm
- - - -
1
2
3
4
5
6
7
8
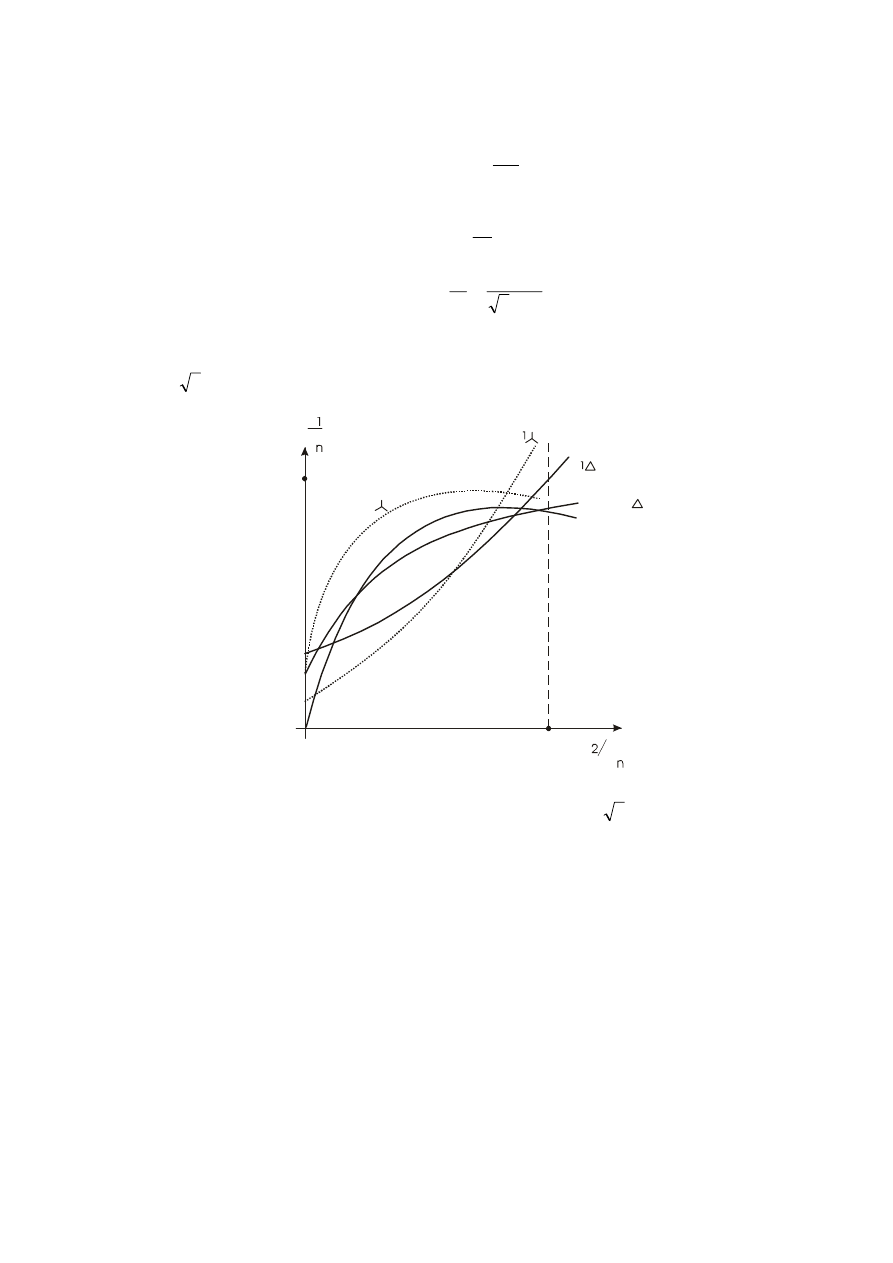
Charakterystyki obciążeniowe w jednostkach względnych przedstawiono na rysunku 3.8.
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
ϕ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
n
2
n
2
n
2
n
1
P
P
f
;
P
P
f
cos
;
P
P
f
I
I
9
gdzie:
2
1
F
F
F
−
=
β
α
+
=
P
P
P
1
2
FD
81
,
9
M
2
=
n
M
05
,
1
P
2
2
=
1
2
P
P
=
η
1
1
1
I
U
3
P
S
P
cos
=
=
ϕ
D - średnica bębna hamulca [m]
Przez przełączenie uzwojeń silnika z trójkąta w gwiazdę zmniejsza się napięcie podawane na fazę
uzwojenia
3
razy.
I
I
P
cosϕ
; ;
cosϕ
1
η
P
η
I
I
cosϕ
1
Rys. 3.8. Charakterystyki obciążenia silnika klatkowego przy połączeniu uzwojeń stojana w trójką
W przybliżeniu zmniejsza się również strumień magnesujący także
3
razy. Przy założeniu stałego
momentu obciążenia spowoduje to wzrost prądu wirnika. Ponieważ prąd stojana jest sumą geometryczną
sprowadzonego prądu wirnika i prądu magnesującego i przy małych obciążeniach główną rolę odgrywa prąd
magnesujący, wobec tego prąd stojana ulega zmniejszeniu. Przy dużych obciążeniach większego znaczenia
nabiera prąd wirnika i dlatego prąd stojana dla połączenia w trójkąt jest mniejszy od prądu przy połączeniu w
gwiazdę. Przebieg współczynnika mocy wynika z tego, że ze wzrostem obciążenia rośnie prąd czynny, a
prąd magnesujący pozostaje prawie stały.
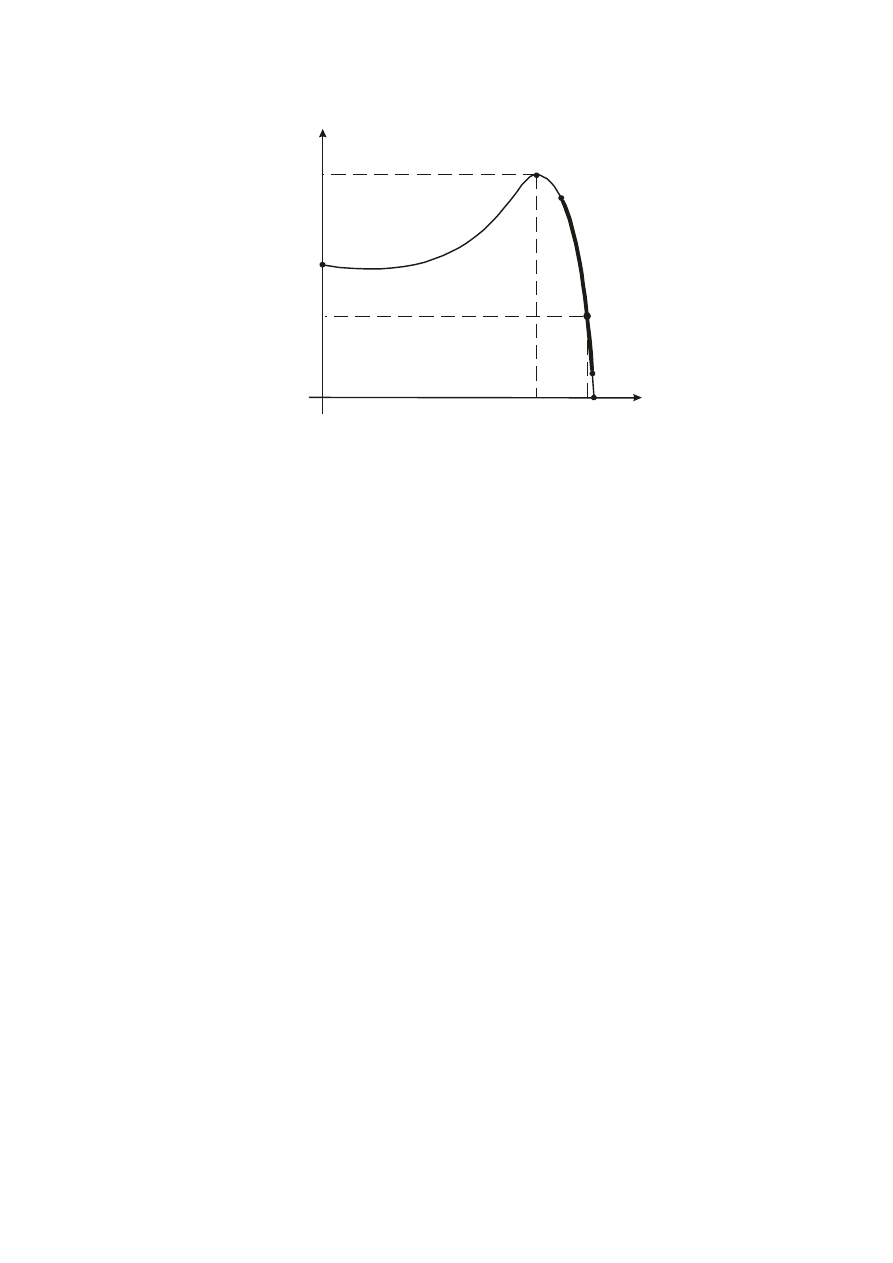
3.3.6. Wyznaczanie charakterystyki mechanicznej.
Charakterystyką mechaniczną nazywa się zależność prędkości obrotowej od momentu na wale silnika
. Na rysunku 3.9. przedstawiona jest konstrukcja charakterystyki mechanicznej.
(
2
M
f
n
=
)
• Punkt 1 charakterystyki – prędkość synchroniczna:
• Punkt 2 – punkt pracy znamionowej (moment i prędkość znamionowa)
• Punkt 3 – moment krytyczny (maksymalny moment jaki rozwija silnik i odpowiadająca mu prędkość
obrotowa)
• Punkt 4 – moment rozruchowy wyznaczony w punkcie 3.3.4.
•
Odcinek a - b charakterystyki – część charakterystyki obciążenia wyznaczona w punkcie 3.3.5.
10
W celu skonstruowania charakterystyki mechanicznej należy zaznaczyć wymienione punkty, a następnie
aproksymować do krzywej przedstawionej na rys. 3.9.
M
n
0
1
2
3
4
M
M
M
n
a
b
n
n
k
n
1
n
r
Rys. 3.9. Charakterystyka mechaniczna silnika indukcyjnego
3.5. Sprawozdanie.
Sprawozdanie powinno zawierać:
• dane znamionowe badanego silnika
• obliczone wartości rezystancji uzwojeń silnika
• charakterystyki biegu jałowego, zwarcia, rozruchowe, i obciążenia
• charakterystykę mechaniczną skonstruowaną w oparciu o przedstawiony algorytm
• obliczone wartości prądu zwarcia i mocy zwarcia przy napięciu znamionowym
• obliczone krotności prądu rozruchowego przy połączeniu w gwiazdę i trójkąt
• obliczone wartości rozruchowego momentu początkowego przy napięciu znamionowym
• obliczone krotności rozruchowego momentu początkowego
• wnioski i spostrzeżenia.
Document Outline
- 3. BADANIE SILNIKA KLATKOWEGO
Wyszukiwarka
Podobne podstrony:
Badanie silnika indukcyjnego je Nieznany
Badanie silnika bocznikowego A4 Nieznany (2)
Badanie silnika szeregowego A4 Nieznany (2)
Badanie silnika indukcyjnego jednofazowego
Badanie silnika indukcyjnego trójfazowego
Badanie silnika indukcyjnego klatkowego
Badanie silnika indukcyjnego jednofazowego
Badanie silnika indukcyjnego pierścieniowego, MASZYNY
Badanie silnika indukcyjnego
Badanie silnika indukcyjnego trójfazowego zasilanego z?lownika napięcia
Badanie silnika indukcyjnego klatkowego trójfazowego (2)
Badanie silnika indukcyjnego pierścieniowego - i, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
badania silnika indukcyjnego trójfazowego, Politechnika Poznańska (PP), Elektronika i elektrotechnik
Badanie silnika indukcyjnego pierścieniowego - e, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Badanie silnika indukcyjnego, Politechnika, Sprawozdania, projekty, wyklady, Elektrotechnika
Badanie silnika indukcyjnego pierścieniowego - d, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Badania silnika indukcyjnego małej mocy pracującego w ciekłym azocie (Politechnika Wrocławska) (2)
Badanie silnika pierścieniowego A4
więcej podobnych podstron