
ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI
LABORATORIUM ROBOTYZACJI
Programowanie kontrolera RH robota
S-420S
Opracował: Karol Szostek
Rzeszów 2008
1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową robota S-420S obsługą sterownika oraz
nauka podstaw programowania sterownika RH.
2. Konfiguracja robota S-420S
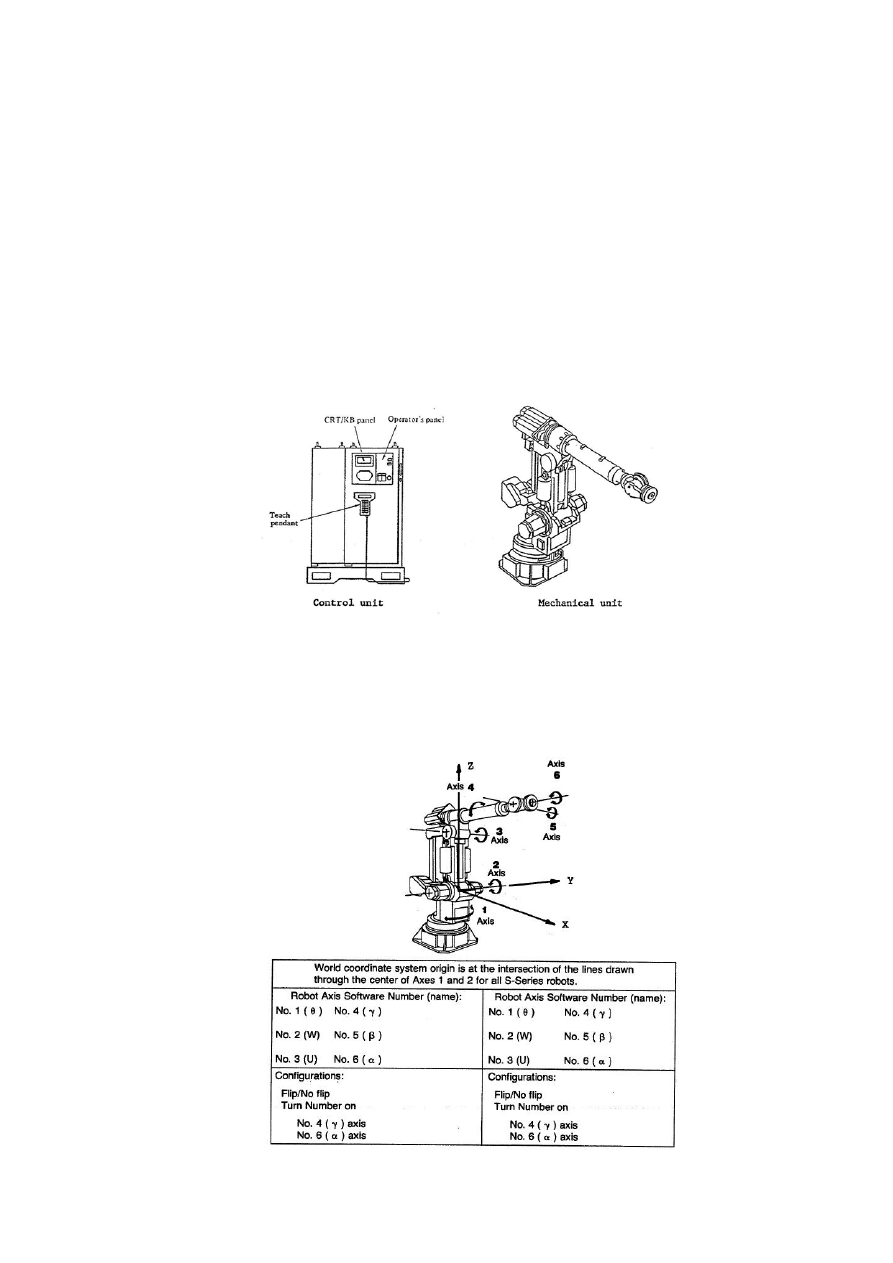
Robot S-420S pokazany na rysunku 2.1 (Mechanical unit) sterowany jest z
wykorzystaniem sterownika RH (Control unit). Sterownik wyposażony jest w panel
sterowania CRT/KB zawierając monitor i klawiaturę. Do sterownika podłączony jest za
pomocą przewodu ręczny programator TeachPendent.
Rysunek 2.1. Konfiguracja robota S-420S.
Robot S-420S posiada 6 serwonapędów sterujących jego pracą. Trzy z napędów są
wykorzystywane do wykonywania ruchów wokół osi 1,2,3 w wyniku których możliwe jest
przemieszczanie końcówki ramienia robota w układzie współrzędnych X,Y,Z ja na rysunku
2.2. Trzy pozostałe napędy wykorzystane są do obrotów wokół osi 4,5,6 dzięki którym
możliwa jest zmiana ustawienia narzędzia mocowanego na końcówce ramienia.
Rysunek 2.2. Osie obrotów robota S-420S.
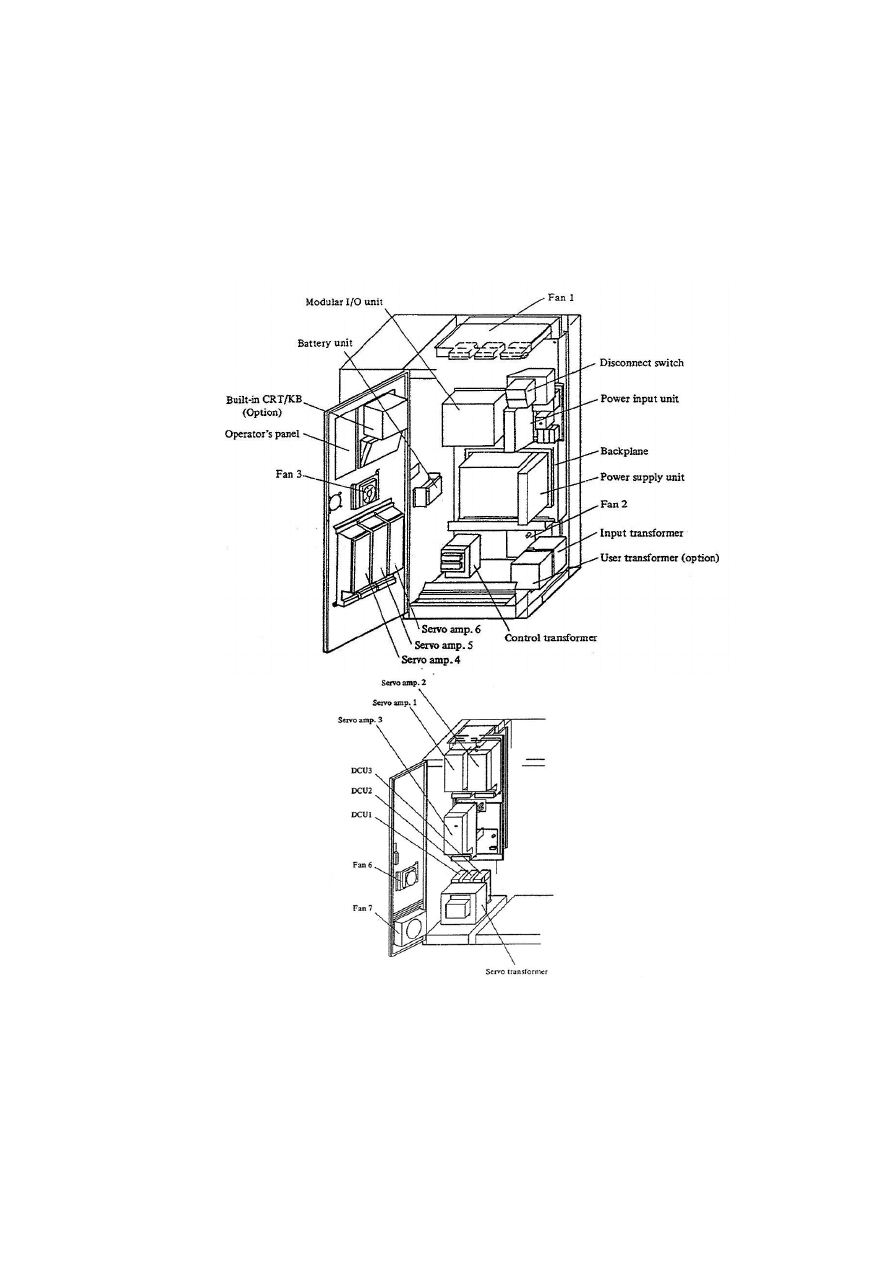
Sterownik RH zawiera komputer z systemem operacyjnym. Płyta główna komputera,
moduły śledzenia ścieżki ruchu, moduł pamięci oraz moduł kontroli serwonapędów
umocowane są na panelu Backpłane pokazanym na rysunku 2.3. W sterowniku RH
umieszczone są karty rozszerzeń wejscia/wyjscia I/O wykorzystywane miedz innymi do
komunikacji w sieci przekazywania stanu linii produkcyjnej itp. Robot posiada zamontowane
cztery karty I/O mające w sumie 32 wejścia i 32 wyjścia cyfrowych. W sterowniku
wbudowane są również wzmacniacze serwonapędów Servo amp. 1- Servo amp. 6. co jest
pokazane na rysunku 2.3.
Rysunek 2.3. Sterownik RH.
Dokładny opis budowy robota oraz sterownika znajduje się w dokumentacji [1].
3. Programowanie kontrolera
Programy kontrolera RH pisane są w specyficznym języku i zapisywane w plikach z
rozszerzeniem *.KL. Przed wykonaniem programu konieczna jest jego translacja do kodu
wykonywalnego. Po kompilacji pliki z kodem wykonywalnym zapisywane są w plikach z
rozszerzeniem *.PC. Podczas translacji oprócz pliku wykonywalnego tworzony jest plik z
parametrami programu o rozszerzeniu *.VR.
Błędy systemowe występujące podczas pracy sterownika są wyświetlane w lewym
górnym rogu monitora panelu CRT/KB.
Dokładny opis składni języka, obsługi panelu CRT/KB, komend wiersza poleceń
KCL, zmiennych systemowych, kodów błędów można znaleźć w dokumentacji Fanuc
Robotics [2].
Istnieje
możliwość przesyłania plików pomiędzy sterownikiem a komputerem PC
poprzez łącze szeregowe RS 232. W cel skopiowania programów należy mieć odpowiednio
skonfigurowane łącze RS 232, na komputera PC należy uruchomić emulator stacji dyskietek
KFloppy.exe w programie należy ustawić katalog roboczy i włączyć emulację dyskietki. Pliki
kopiuje się wydając komendę cop w wierszu poleceń KCL sterownika RH albo
wykorzystując program kopiujący File/Utility menu głównego systemu KAREL np.:
Polecenie KCL>cop/o bm:DOCKING.KL fd: skopiuje plik DOCKING.KL z pamięci
sterownika na dyskietkę.
Przykładowy program DOCKING.KL przesuwający ramię robota z pozycji aktualnej
do pozycji zadanej pokazany jest w Tabela 3.1. Pozycja zadana zapamiętana jest w zmiennej
baza. W celu poprawnego działania programu wartość zmiennej baza należy wprowadzić do
programu za pomocą programatora TeachPendent. Zmienna baza jest zapamiętywana w pliku
DOCKIND.VR.
PROGRAM docking
--przesuwanie ramienia do pozycji baza
VAR
baza: POSITION
BEGIN
$SPEED=200
$MOTYPE=LINEAR
MOVE TO baza
END docking
Tabela 3.1 Program przesuwający ramię robota do pozycji baza po prostej.
Dokładne informacje na temat wykorzystywania programatora TeachPendent oraz
podstawy programowania można znaleźć w dokumentacji [1].
W tabeli 3.2 zamieszczony jest program rysujący zygzak oraz kółko na płaszczyźnie
XY. W programie tym wszystkie pozycje wyliczane są na podstawie pozycji początkowej
ramienia robota i do jego poprawnego działania nie jest konieczne wprowadzanie żadnych
danych z wykorzystaniem programatora TeachPendent.
PROGRAM zygzak
--programy rysujący na płaszczyźnie XY
VAR
i: INTEGER
punkt: POSITION
pocz: POSITION
x: real
y: real
z: real
w: real

p: real
r: real
A: POSITION
B: POSITION
C: POSITION
D: POSITION
config: string[100]
BEGIN
WRITE(cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr)
WRITE('program zygzak',cr)
WRITE TPMENU('program zygzak ',cr)
$MOTYPE=LINEAR
$SPEED=200
pocz=CURPOS
unpos(CURPOS,x,y,z,w,p,r,config)
WRITE('x=',x,cr)
WRITE('y=',y,cr)
WRITE('z=',z,cr)
WRITE('w=',w,cr)
WRITE('p=',p,cr)
WRITE('r=',r,cr)
z=z+20
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
x=x+30
y=y-30
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
z=z-25
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
FOR i=1 TO 3 DO
x=x+20
y=y-20
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
x=x-20
y=y-20
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
ENDFOR
A=CURPOS
B=POS(x+40,y-40,z,w,p,r,config)
C=POS(x,y-80,z,w,p,r,config)
D=POS(x-40,y-40,z,w,p,r,config)
WITH $MOTYPE=CIRCULAR MOVE TO C VIA B
WITH $MOTYPE=CIRCULAR MOVE TO A VIA D
$MOTYPE=LINEAR
z=z+5
punkt=POS(x,y,z,w,p,r,config)
MOVE TO punkt
MOVE TO pocz
END zygzak
Tabela 3.2 Program rysujący na płaszczyźnie XY.
W tabeli 3.3 zamieszczony jest program który może zostać wykorzystany do
przestawiania np. butelki pomiędzy dwoma położeniami, do poprawnego działania programu
konieczne jest wprowadzenie danych pozycyjnych w ścieżkach: scieA, scieB, scieC z
wykorzystaniem programatora TeachPendet.
PROGRAM butelka
--programy przestawianie przedmiotu
VAR
scieA: PATH
scieB: PATH
scieC: PATH
BEGIN
WRITE(cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr,cr)
WRITE('program przestawianie przedmiotu',cr)
WRITE TPMENU('program przestawianie przemiotu ',cr)
$SPEED=500
OPEN HAND 1
MOVE ALONG scieA
CLOSE HAND 1
DELAY 500
MOVE ALONG scieB
OPEN HAND 1
DELAY 500
MOVE ALONG scieC
CLOSE HAND 1
END butelka
Tabela 3.2 Program do przestawiania przedmiotów.
4. Zadania do wykonania
Istnieje do wyboru zrealizowanie jednego z kilku zadań.
Zadanie I.
Wykonanie programu piszącego napis na płaszczyźnie XY. Zadanie to może zostać
rozwiązane na kilka sposobów. W najprostszym przypadku wypisywany napis może być
nierozłącznie związany z programem, w przypadku bardziej zaawansowanym sterownik po
uruchomieniu programu powinien wypisać na ekranie panelu CRT albo na wyświetlaczu
programatora TeachPendent prośbę o wprowadzenia z klawiatury ciągu znaków ewentualnie
o podanie innych danych takich jak wielkość liter rodzaj czcionki itp. oraz o potwierdzenie
wprowadzenia danych. Sam program może być napisany w jednym module ale w wersji
zaawansowanej powinien składać się z kilku podprogramów programu głównego
komunikującego się z operatorem, programu piszącego napis, a nawet podprogramów
piszących poszczególne litery.
Zadanie II
Nalewanie z butelki do kubka. Zadanie nalewania z butelki do kubków można
rozwiązać w różny dwojaki w zależności od tego czy mamy wystarczają ilość kubków do
rozlania całej butelki czy też nie. Jeśli mamy wystarczającą liczbę kubków można od razu
rozlać całą butelkę. W przypadku gdy liczba kubków jest mała robot po napełnieniu kubków
powinien na monitorze wypisać prośbę o potwierdzenie wykonania napełnienia kolejnych i
dopiero po potwierdzeniu napełnić ponownie kubki.
Zadanie III

Wykonanie programu piszącego na dowolnej płaszczyźnie.
Zadanie IV
Wykonanie programu piszącego na zdefiniowanej powierzchni np. na sferze.
5. Stanowisko laboratoryjne
Stanowisko laboratoryjne wyposażone jest w robot S-420S sterowany sterownikiem
RH.
6. Przebieg ćwiczenia
1. Zapoznanie się z budową robota S-420S oraz sterownika RH.
2. Uruchomienie robota. Nauka obsługi panelu sterowania CRT/KB oraz manipulatora
TeachPendent. Zapoznanie się z menu głównym systemu operacyjnego, wierszem
poleceń KCL, zmiennymi systemowymi, elementami języka KAREL, edytorem tekstu.
3. Uruchomienie umieszczonych w sterowniku programów.
7. Opracowanie wyników
W opracowaniu sprawozdaniu należy umieści wykonany program oraz omówić
wyniki z przeprowadzonych testów pracy programu.
8. Literatura
1. Dokumentacja Fanuc Robotics Maintenance manual [MARMKS42H1174EF][B-67205E-
G01].pdf
2. Dokumentacja Fanuc Robotics MAROKENHA0885EF - Enhanced KAREL Operations
Manual v. 2.22 R.pdf
3. Dokumentacja Fanuc Robotics MARSKAMSH0885EF - KAREL Reference Manual v.2.22
REV.A..pdf
Wyszukiwarka
Podobne podstrony:
13 programowalny kontroler przerwan 8259
Program szkolenia dyspozytorow Nieznany
Programowanie Obiektowe ZadTest Nieznany
algorytmy, programy, jezyki pro Nieznany (2)
12 TECHNOLOGIA I KONTROLA ZAGES Nieznany (2)
Planowanie programu dla zdrowia Nieznany (4)
Program Strategiczny informacje Nieznany
Programy i wymagania teoretyczn Nieznany
Programowanie obiektowe(cw) 2 i Nieznany
Cwiczenie4 Programowanie id 125 Nieznany
Planowanie programu dla zdrowia Nieznany
Programowana tablica swietlna i Nieznany
Nowe uprawnienia kontrolne PIP Nieznany
Podstawy programowania 1 W2 id Nieznany
Planowanie programu dla zdrowia Nieznany (5)
Programu Kontroli Jakości Pracy Ankieterów oraz jego podstawowe zasady
program oddzialywan logopedyczn Nieznany
program funkcjonalno uzytkowy i Nieznany
więcej podobnych podstron