
1
Badanie bezszczotkowego silnika prądu stałego z magnesami trwałymi
(BLDCM)
Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sterowaniem bezszczotkowego
silnika prądu stałego z magnesami trwałymi (BLDCM).
1. Opis sterownika silnika BLDCM
Do sterowania silnika BLDCM zastosowano układ falownika przedstawiony na rysunku 1.
Falownik umożliwia pracę dwukierunkową (lewo-prawo) układu napędowego. Możliwa jest zmiana
kierunku wirowania w trakcie pracy silnika, przy czym wymagane jest dołączenie rezystora
hamującego R
h
w obwodzie pośredniczącym sterownika. Czas rozruchu, hamowania jest
programowany. Istnieje możliwość zatrzymywania silnika wybiegiem przy pracy jednokierunkowej.
Falownik do detekcji położenia wirnika wykorzystuje informację z enkodera absolutnego
zamontowanego na wale silnika.
Rys.1. Widok falownika wektorowego MCF710
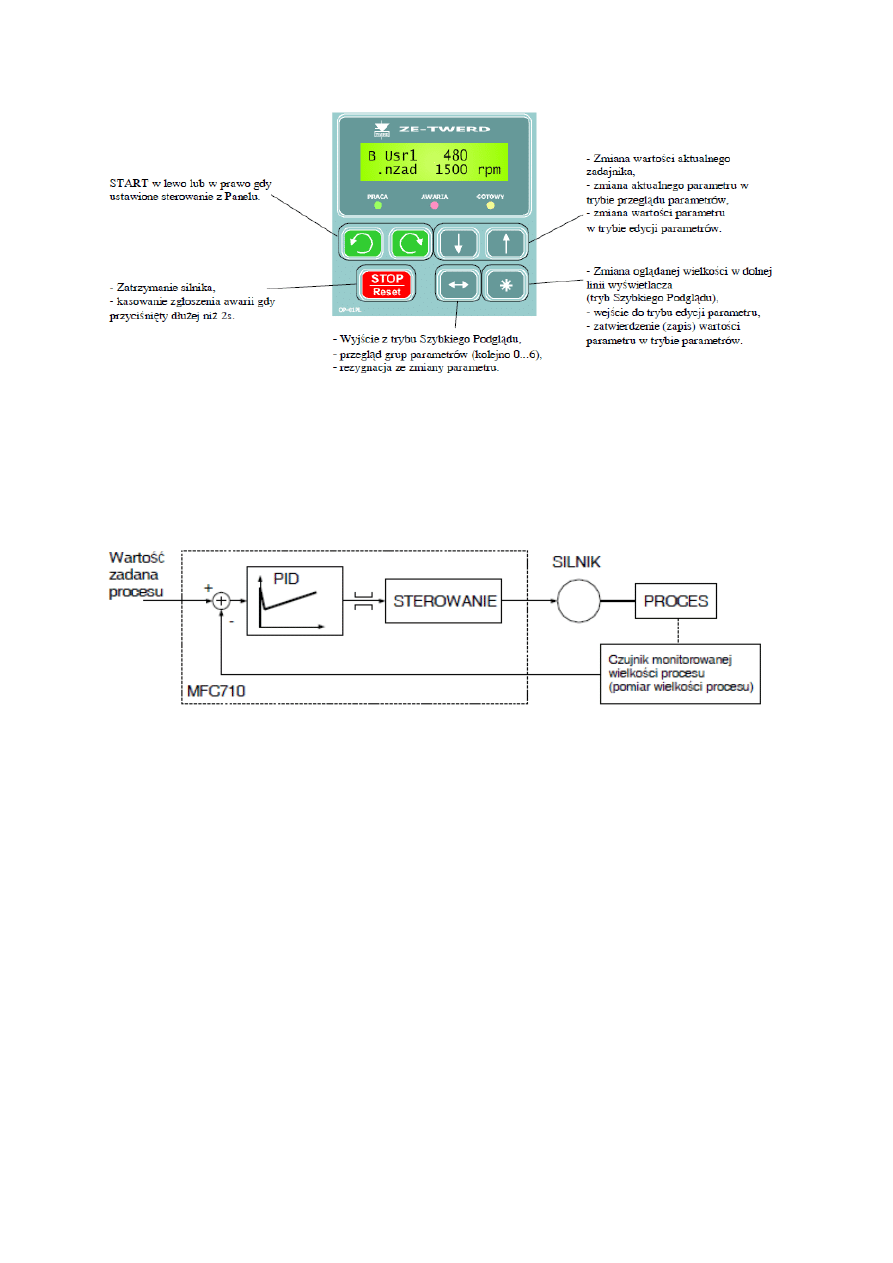
Na rysunku 2 pokazano widok panelu sterującego z zaznaczeniem podstawowych funkcji. Panel
sterujący układu służy do ciągłego monitorowania wybranych parametrów(np. częstotliwość
wyjściowa, prąd silnika), kontroli pracy układu (START / STOP, zmiana zadajnika, kasowanie
zgłoszenia awarii) oraz do przeglądu i zmiany parametrów przemiennika. Falownik pozwala zmieniać
częstotliwość przełączeń f
kom
w zakresie od 0 do 50Hz co odpowiada prędkości znamionowej silnika
n
N
=1500obr/min tj.
(1)
gdzie p jest liczbą par biegunów wirnika. W danym przypadku p wynosi 2.
2
Rys.2. Widok panelu sterującego, podstawowe funkcje
Falownik umożliwia tylko pracę w zamkniętym układzie regulacji prędkości obrotowej, przy czym
regulacja prędkości obrotowej możliwa jest w pierwszej strefie regulacji (praca przy stałym
momencie). Nie umożliwia pracy w drugiej strefie regulacji (praca przy stałej mocy). Układ regulacji
wyposażony jest w regulator typu PID (Proporcjonalno-Całkująco-Różniczkujący). Regulator służy do
stabilizacji na określonym poziomie dowolnego parametru procesu (rys. 3).
Rys. 3. Schemat układu regulacji
Częstotliwość nośna tranzystorów w układzie mocy jest ustawiana, ale nie może być zmieniana w
trakcie pracy falownika. Przy ustawieniu fabrycznym wynosi ona 10 kHz.
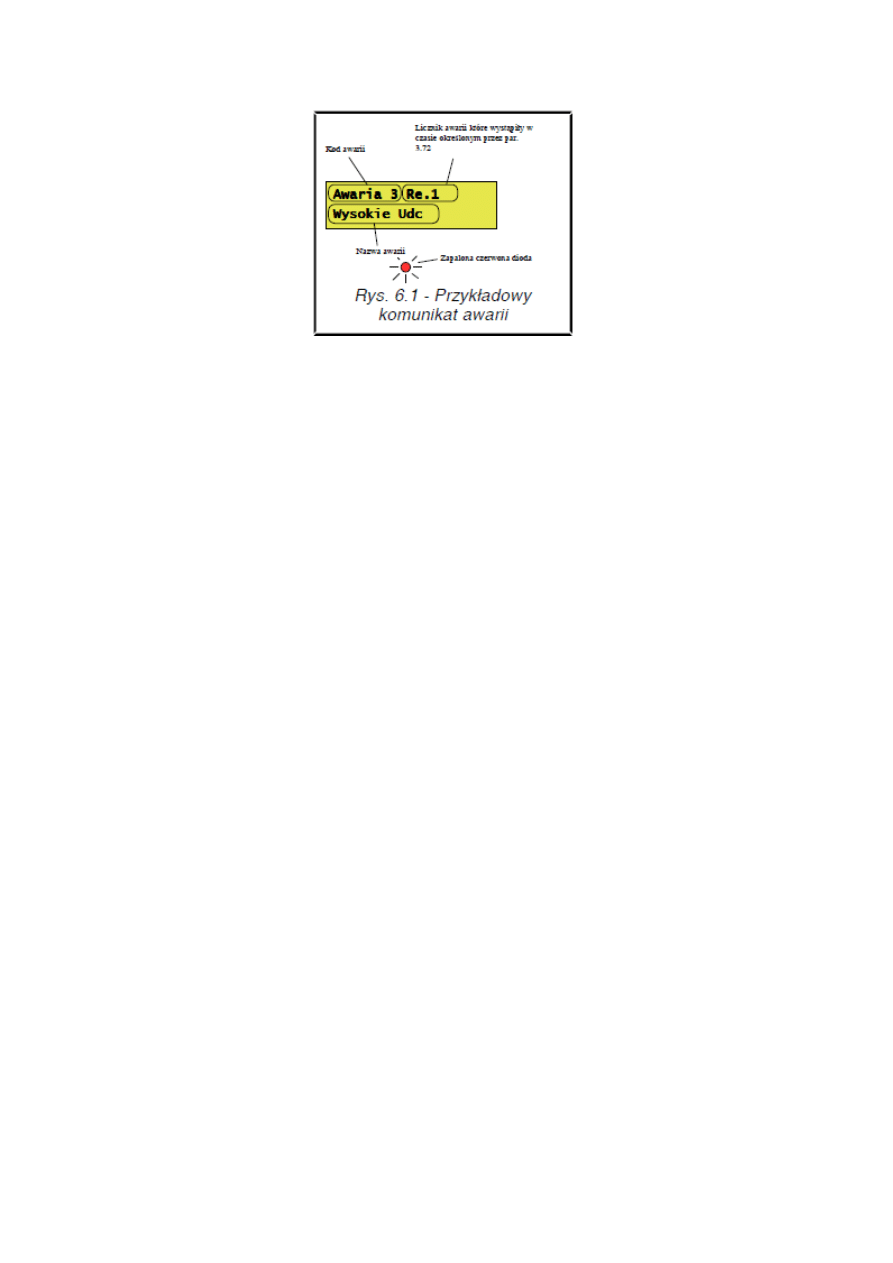
Falownik sygnalizuje stan awaryjny świeceniem czerwonej diody oraz wyświetleniem komunikatu
(rys.4). Po wystąpieniu awarii silnik zostaje zatrzymany. Ponowne uruchomienie falownika jest
możliwe po usunięciu przyczyny awarii oraz skasowaniu informacji o wystąpieniu błędu. Ręczne
kasowanie błędu polega na przyciśnięciu przez okres około 2s przycisku STOP/RESET.
3
Rys.4. Przykładowy komunikat o awarii
2. Dane znamionowe maszyn
W ćwiczeniu w skład zestawu maszynowego wchodzą:
2.1.Silnik BLDC o parametrach technicznych:
Rodzaj pracy S1
Napięcie zasilania falownika: 400V AC
Moc znamionowa: 4 kW
Częstotliwość znamionowa: 50 Hz
Prąd znamionowy silnika: 13,5A
Sprawność znamionowa silnika: 89%
Znamionowa prędkość obrotowa: 1500 obr/min
Moment znamionowy: 25,5 Nm
Przeciążalność chwilowa: 3
2.2.Maszyna prądu stałego o parametrach technicznych:
Rodzaj pracy S1
Napięcie znamionowe: 440V DC
Moc znamionowa: 5,5 kW
Prąd znamionowy silnika: 14,5A DC
Prąd znamionowy wzbudzenia: 1,38A DC
Znamionowa prędkość obrotowa: 1540 obr/min
3. Program ćwiczenia
3.1
Zapoznanie się z podstawowymi danymi zastosowanych w układzie maszyn
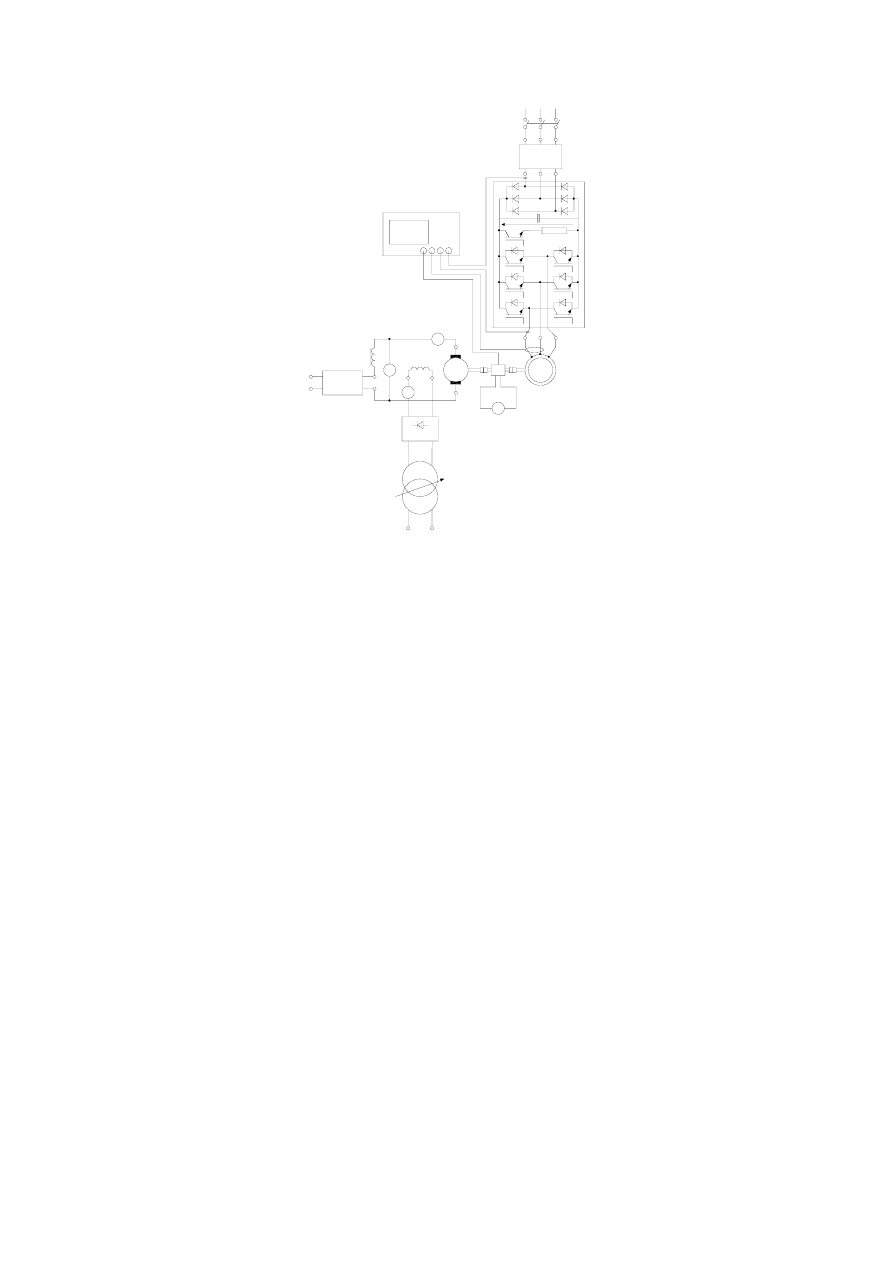
3.2
Połączyć układ pomiarowy wg schematu zamieszczonego na rysunku 5.
4
Rys.5. Schemat układu pomiarowego
3.3
Uruchomienie układu
3.4
Obserwacja i rejestracja przebiegów czasowych w stanach ustalonych
Ustawić częstotliwość znamionową (f=50Hz) i uruchomić silnik. Ustawić na oscyloskopie podstawę
czasu równą 10ms. Dokonać rejestracji przebiegów czasowych prądu pobieranego z sieci
zasilającej i
1
, prądu jednego z pasm silnika i
s1
oraz napięcia międzypasmowego podawanego na
silnik u
s12
w dwóch przypadkach:
Przy prądzie obciążenia prądnicy równym I
obc
=0A (praca na biegu jałowym)
Przy prądzie obciążenia prądnicy równym I
obc
=15A (praca z obciążeniem)
3.5
Obserwacja i rejestracja przebiegów czasowych w stanach przejściowych
Ustawić częstotliwość znamionową (f=50Hz) i uruchomić silnik. Ustawić na oscyloskopie podstawę
czasu równą 500ms. Dokonać rejestracji przebiegów czasowych prędkości obrotowej silnika n, prądu
pobieranego z sieci zasilającej i
1
, prądu jednego z pasm silnika i
s1
oraz napięcia międzypasmowego
podawanego na silnik u
s12
w trzech przypadkach:
przy rozruch silnika
przy zatrzymywaniu silnika
przy zmianie kierunku wirowania.
Rejestrację przeprowadzać przy braku obciążenia prądnicy prądu stałego.
3.6
Wyznaczanie charakterystyk ruchowych badanego silnika BLDC przy:
3.6.1 f=50 Hz
3.6.2 f=40 Hz
3.6.3 f=30 Hz
3.6.4 f=20 Hz
L1
L2
L3
M
U
V
W
4D
+
-
~
F1
F2
Atr
~230V
Miernik
parametrow
sieci 10A
L1* L2* L3*
L1
L2
L3
+
-
G
A1
A2
A
Falownik
I
max
=25A
~230 V
+
-
E<200V
V
A
W1
TM
U
dc
S
ham
R
ham
V
Czerokanałowy
oscyloskop cyfrowy

5
Dla każdego przypadku zmieniać obciążenie prądnicy w zakresie od 0 do około 15A (około 10-12
pomiarów). Dla każdego obciążenia zapisywać następujące parametry: ustawioną częstotliwość na
falowniku f
kom
, wartość skuteczną prądu pobieranego z sieci I
1rms
(oscyloskop cyfrowy), wartość
skuteczną prądu pobieranego przez silnik I
s1rms
(oscyloskop cyfrowy), moc czynną P
1
pobieraną z sieci
zasilającej (miernik parametrów sieci), współczynnik mocy cos
(miernik parametrów sieci) oraz
napięcie proporcjonalne U
TL
do momentu obciążenia (multimetr cyfrowy).
Na podstawie wyników badań narysować następujące zależności: n=f(T
L
), I
1rms
=f(T
L
), I
s1rms
=f(T
L
),
cos
=f(T
L
),
=f(T
L
).
3.7
Wyznaczenie charakterystyki regulacyjnej
Ustawić częstotliwość na falowniku równą f
kom
=20Hz oraz obciążyć prądnicę prądem np. 14A.
Zwiększać częstotliwość na falowniku ze skokiem co 5Hz aż do osiągnięcia wartości znamionowej.
Dla każdej ustawionej częstotliwości zmieniać obciążenie tak, aby prąd obciążenia (lub napięcie
proporcjonalne do momentu obciążenia) miał taką samą wartość oraz zapisywać następujące
parametry: ustawioną częstotliwość na falowniku f
kom
, wartość skuteczną prądu pobieranego z sieci
I
1rms
(oscyloskop cyfrowy), wartość skuteczną prądu pobieranego przez silnik I
s1rms
(oscyloskop
cyfrowy), moc czynną P
1
pobieraną z sieci zasilającej (miernik parametrów sieci), współczynnik mocy
cos
(miernik parametrów sieci) oraz napięcie proporcjonalne U
TL
do momentu obciążenia (multimetr
cyfrowy).
Na podstawie wyników badań narysować następujące zależności: n=f(P
out
), I
1rms
=f(P
out
), I
s1rms
=f(P
out
),
cos
=f(P
out
),
=f(P
out
).
3.8
Opracowanie wyników pomiarów
Moment obciążenie wyznaczamy z zależności:
(2)
gdzie: c
T
=25,5 mV/Nm.
Moc wyjściową P
out
wyznaczamy z zależności:
(3)
Sprawność ogólną układu napędowego
wyznaczmy z zależności:
(4)
Wyszukiwarka
Podobne podstrony:
Badanie emisji silnika o zapłonie ZI, Silniki Spalinowe i ekologia
cwiczenie ii badanie napedu z silnikiem reluktancyjnym przel
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
Badanie trójfazowego silnika indukcyjnego pierscieniowego
Badanie 3-fazowego silnika klatkowego, Polibuda, IV semestr, SEM IV, Maszyny Elektryczne. Laboratori
Badanie trojfazowego silnika klatkowego
bezszczotkowy silnik pradu stalego
Naped z bezszczotkowym silnikie Nieznany
Bezszczotkowy silnik pradu stal Nieznany (2)
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
dane znamionowe, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (graviora), Badanie trójfazowego sil
Badanie silnika indukcyjnego pierścieniowego - i, Szkoła, Politechnika 1- 5 sem, chomikuj, 4 sem (gr
Badanie jednofazowego silnika asynchronicznego klatkowego(1), SGGW TRiL, Elektrotechnika Tril Sggw
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
Badanie 3 fazowego silnika indukcyjnego pierścieniowego
Badanie asynchronicznego silnika pierścieniowego
Badanie 3-fazowego silnika komutatorowego typu Schrage - f, Polibuda, IV semestr, SEM IV, Maszyny El
więcej podobnych podstron