Politechnika Rzeszowska
1
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
BADANIE NAPĘDU Z SILNIKIEM RELUKTANCYJNYM
PRZEŁĄCZALNYM (SRM)
Celem ćwiczenia jest zapoznanie się z budową, układem sterowania oraz sposobami
sterowania silnika reluktancyjnego przełączalnego (switched reluctance motor – SRM) oraz
sposobem kształtowania charakterystyk mechanicznych poprzez zmianę parametrów.
sterowania.
1. Opis sterownika SRM
Sterownik mikroprocesorowy SRM zastosowany w laboratorium umożliwia:
•
regulację napięcia zasilającego silnik poprzez modulację szerokości impulsów
(PWM) w zakresie od około 0 do 100% U
dc
,
•
regulację kąta załączenia
θ
on
w zakresie do –10
°
do –2,5
°
(co 0,5
°
),
•
regulację kąta wyłączenia
θ
off
w zakresie od 30
°
do 40
°
(co 0,5
°
).
Klawisze funkcyjne sterownika
•
klawisz „
↵
↵↵
↵
” – START – rozruch silnika,
•
klawisz „0” – STOP – zatrzymanie silnika,
•
klawisz „1” – funkcja regulacji współczynnika wypełnienia PWM,
•
klawisz „2” – funkcja regulacji kąta załączenia
θ
on
,
•
klawisz „3” - funkcja regulacji kąta wyłączenia
θ
off
,
•
klawisze „
↑↑↑↑
” i „
↓↓↓↓
” – umożliwiają zmianę wielkości regulowanej określonej przez
klawisze funkcyjne „1”, „2” i „3”.
Wyświetlacz
W zależności od aktualnie włączonej funkcji na wyświetlaczu wyświetlane są następujące
informacje:
•
współczynnik wypełnienia sygnału PWM w „%”,
•
kąt załączenia
θ
on
w stopniach,
•
kąt wyłączenia
θ
off
w stopniach,
•
prędkość obrotowa n [obr/min].
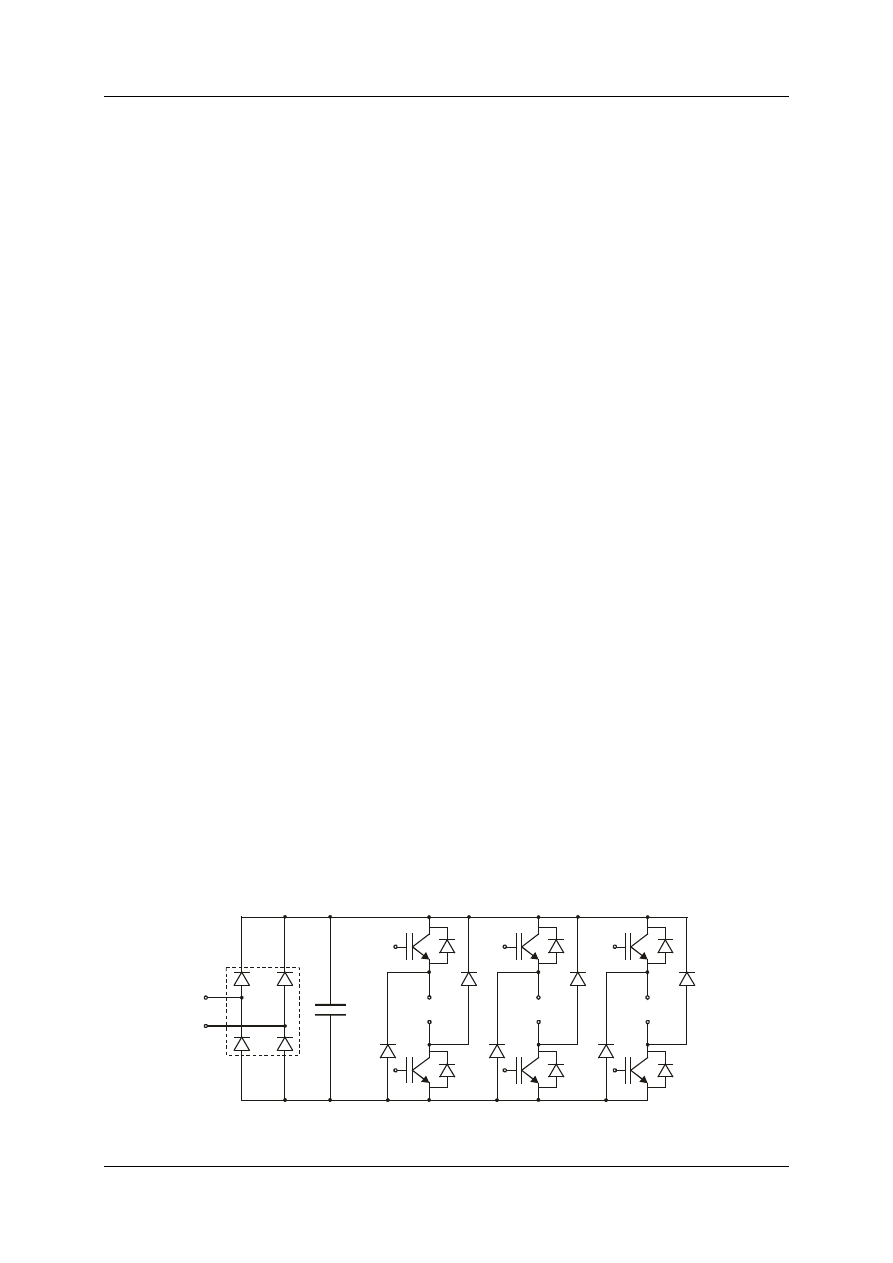
Układ zasilający
Na rysunku 1 przedstawiono schemat układu zasilającego zastosowanego w układzie
laboratoryjnym.
C
1
T
1
D
1
1
1’
D
2
T
2
2
2’
D
4
D
3
T
4
T
3
3
3’
D
6
D
5
T
6
T
5
~
M
1
Rys.1. Schemat układu zasilającego (falownika) zastosowanego w badaniach laboratoryjnych

Politechnika Rzeszowska
2
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
UWAGA !
o
Układ powinien być zasilany z zasilacza wyposażonego w funkcję ograniczenia
prądowego.
o
Na zaciski „Zasilanie” układu zasilającego nie należy podłączać napięcia
większego niż 60 V prądu stałego !
2. Dane zastosowanych maszyn
Silnik reluktancyjny przełączalny:
o
Napięcie zasilające:
U
dc
= 60 V
o
Prędkość:
n=6000 obr/min
o
Prąd pasmowy maksymalny ciągły:
I
phmaxC
= 2 A
o
Prąd pasmowy maksymalny 10-cio sekundowy:
I
phmax10s
= 3 A
o
Liczba pasm:
N
ph
=3
o
Liczba biegunów stojana:
N
s
=6
o
Liczba zębów wirnika:
N
r
=4
o
Rezystancja uzwojenia pasma stojana:
R
s
=5.2
Ω
, @20
°
C
o
Szerokość bieguna stojana:
β
s
=36
°
o
Szerokość zęba wirnika:
β
r
=31
°
o
Indukcyjność własna w położeniu niewspółosiowym:
L
u
=0.019 H
o
Indukcyjność własna w położeniu współosiowym
(w stanie nienasyconym):
L
a
= 0.082 H
Prądnica bocznikowa DC:
o
Prąd wzbudzenia:
I
f
= 3 A
o
Prąd twornika:
I
a
= 3 A
3. Program ćwiczenia
3.1.Zapoznać się z podstawowymi danymi zastosowanych w układzie maszyn
3.2.Połączyć układ wg schematu zamieszczonego na rysunku 2.

Politechnika Rzeszowska
3
Katedra Elektrodynamiki i Układów Elektromaszynowych
Opracował: dr inż. Piotr Bogusz
Rzeszów, 5.05.2006
Rys.2. Schemat układu połączeń
3.3.Ustawić na zasilaczu zasilającym silnik napięcie ok. 30 V
3.4.Uruchomić silnik przyciskiem „
↵
”, a następnie zwiększyć napięcie na zasilaczu
do 60 V
3.5.Zarejestrować przebiegi prądów i napięć pasmowych silnika:
•
dla dwóch różnych współczynników wypełnienia sygnału PWM (
ε
), przy
stałych kątach załączenia i wyłączenia (
θ
on
i
θ
off
= const)
•
dla dwóch różnych kątów załączenia
θ
on
•
dla dwóch różnych kątów wyłączenia
θ
off
3.6.Wyznaczyć ch-ki regulacyjne na biegu jałowym silnika:
•
n=f(
ε
) przy
θ
on
i
θ
off
= const
•
n=f(
θ
on
) przy
ε
i
θ
off
= const
•
n=f(
θ
off
) przy
ε
i
θ
on
= const
3.7.Wyznaczyć ch-ki mechaniczne silnika reluktancyjnego przełączalnego (n=f(T
L
),
sprawności wypadkowej (
η
=f(T
L
) oraz prądu źródła zasilającego (I
dc
=f(T
L
) dla:
•
dwóch
różnych
współczynników
wypełnienia
sygnału
PWM
(
ε
),
przy
θ
on
i
θ
off
= const
•
dwóch różnych wartości kąta załączenia, przy
ε
i
θ
off
= const
Wyszukiwarka
Podobne podstrony:
badanie napedu z silnikiem reluktancyjnym przelaczalnym srm instrukcja
II seria, Ćwiczenie 11 Badanie obwodu ze szczeliną
Badanie właściwości silnika bocznikowego, Studia, sprawozdania, sprawozdania od cewki 2, Dok 2, Dok
Badanie emisji silnika o zapłonie ZI, Silniki Spalinowe i ekologia
Mikroekonomia Ćwiczenia II sem
Podstawy prawa cywilnego z umowami w administracj ćwiczenia II
Ćwiczenie 1, II rok, Immunologia
11 Silnik indukcyjny pierścieniowy SUHf, Szkoła, Politechnika 1- 5 sem, SEM IV, Maszyny Elektryczne.
GRUCZOLY PIERSIOWE I DOLY PACHOWE (5b), Pielęgniarstwo, rok II, badania fizykalne, opracowania
Ćwiczenia II, LEŚNICTWO SGGW, MATERIAŁY LEŚNICTWO SGGW, Transport, Ćwiczenia
Reumatologia ćwiczenia II RZS
Chemia kliniczna ćwiczenie II, semestr III
silnik reluktancyjny
ćwiczenia II ruchy w płaszczyznach
ćwiczenia I i II notatki
więcej podobnych podstron