PROJEKTOWANIE I SYMULACJA UKŁADÓW STEROWANIA
PROJEKT STREROWANIA AUTOMATYCZNĄ MYJKĄ ZINTEGROWANĄ Z
LINIĄ MONTAŻOWĄ
Karolina Pakulska
Michał Borejszo
ID-A0-61
Zadanie
Zdefiniowaliśmy problem w następujący sposób:
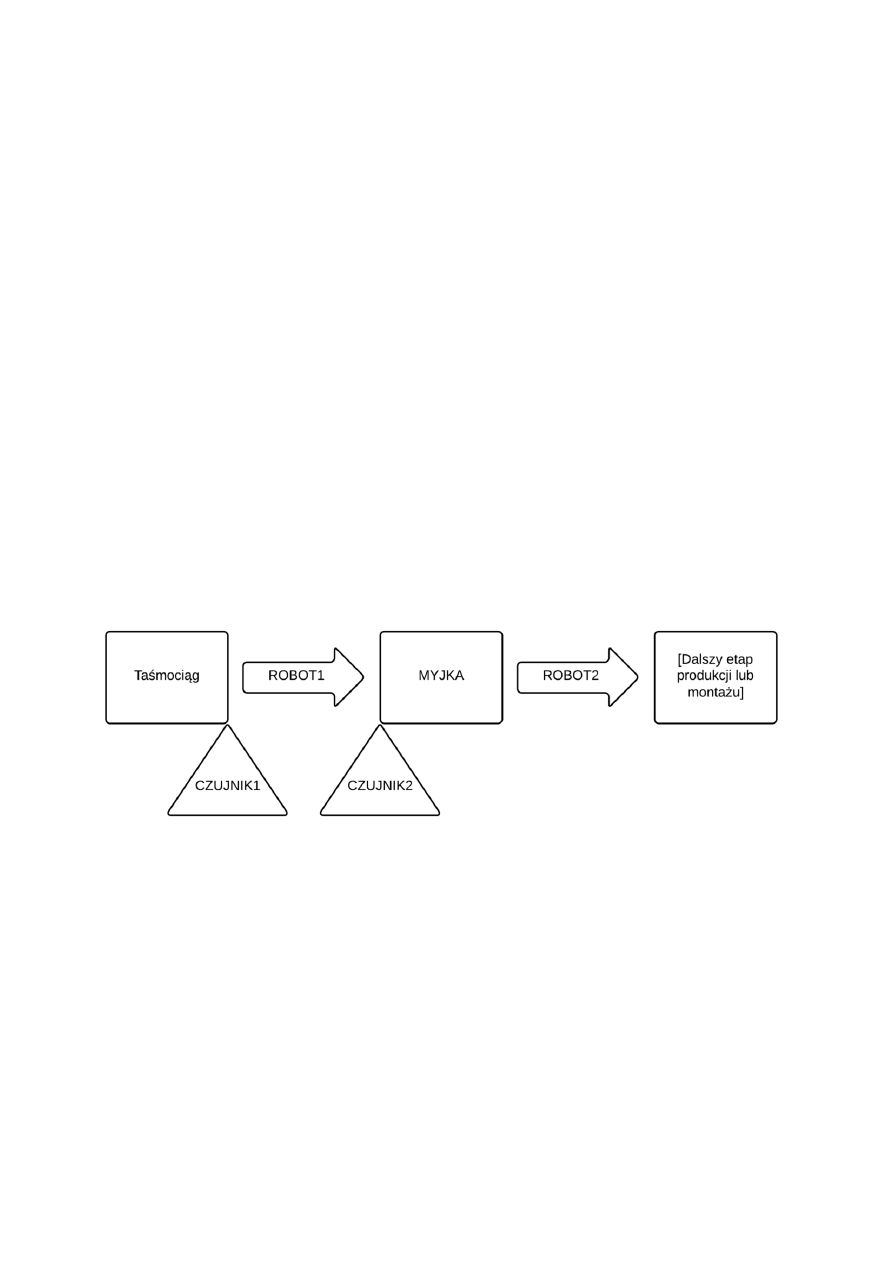
„Elementy są transportowane taśmociągiem do stanowiska płukania. Z chwilą wykrycia elementu
przez czujnik indukcyjny taśmociąg zostaje zatrzymany, a element jest przenoszony przez
manipulator na stanowisko płukania. Na stanowisku płukania siłownik pneumatyczny wprawia
element w ruch oscylacyjny przez X sekund, po czym element jest przenoszony na drugi taśmociąg
przez manipulator. Ruch taśmociągów zostaje wznowiony aż do wykrycia kolejnego elementu. Cały
proces uruchamiany jest przyciskiem START i może być w dowolnym momencie zatrzymany po
naciśnięciu przycisku STOP. „
Projekt ideowy stanowiska
Założono, że oba zrobotyzowane manipulatory są zaprogramowana do wykonania operacji
przeniesienia elementu. Domyślnie roboty oczekują w bezpiecznej pozycji. Po podaniu sygnału na
wejście START robot zaczyna wykonywać program do jego końca, lub do pojawienia się sygnału
na wejściu STOP (wtedy ramie manipulatora zostaje zatrzymane w miejscu, wymagana jest
interwencja operatora).
Myjka docelowo jest obsługiwana przez siłownik pneumatyczny, sterowany zaworem zwrotnym,
wykonujący ruch posuwisto-zwrotny.
Ilustracja 1: Ideowy projekt sterowanego stanowiska
Projekt sterowania
Dla każdego elementu wykonawczego stworzono algorytm sterowania. Algorytmy są wykonywane
równolegle, przez sterownik sterujący.
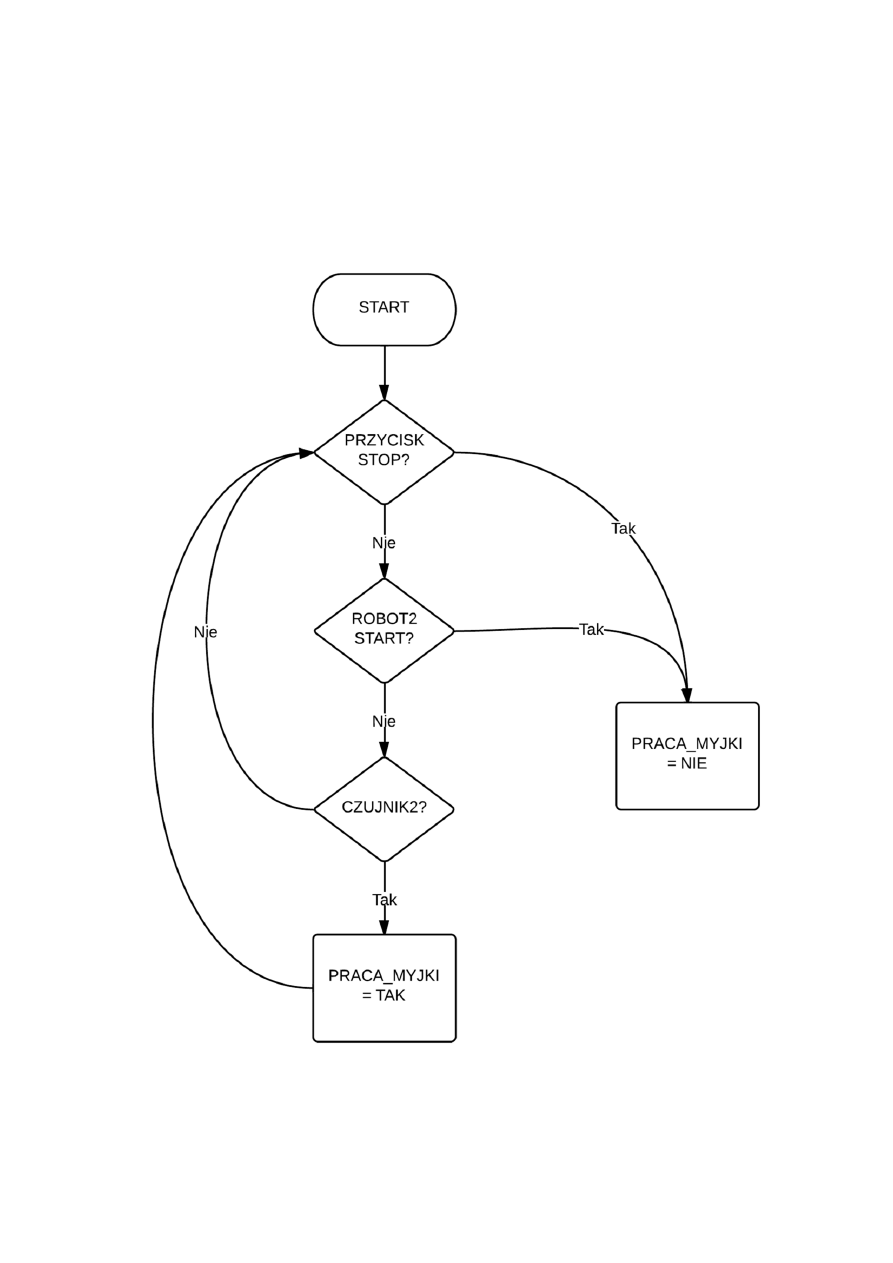
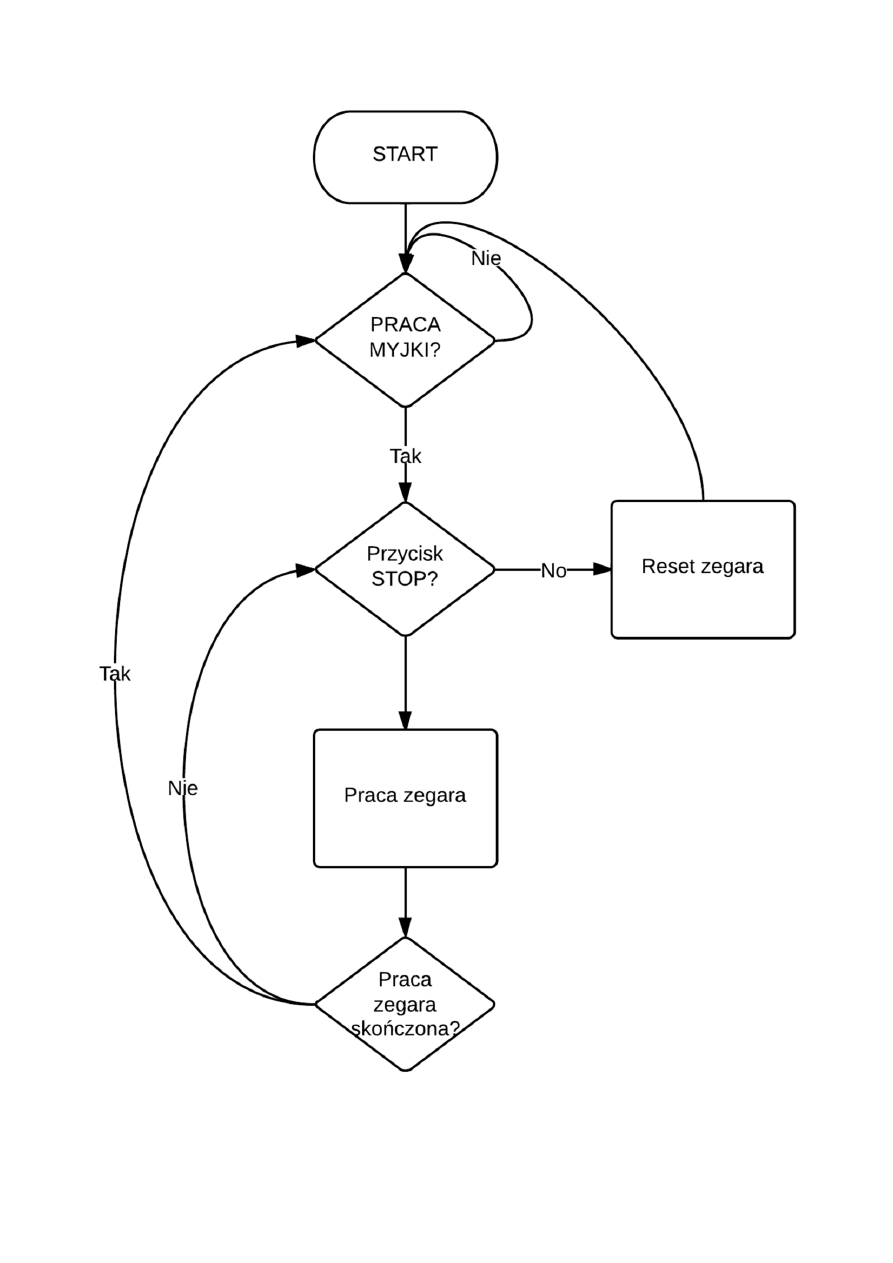
Dla uproszczenia, w algorytmach jest wykorzystywana zmienna PRACA_MYJKI (przyjmuje ona
wartość TAK gdy siłownik w myjce wykonuje pracę ↔ element jest w myjce). Algorytm
wyznaczania wartości zmiennej:
Ilustracja 2: Algorytm wyznaczania zmiennej PRACA_MYJKI
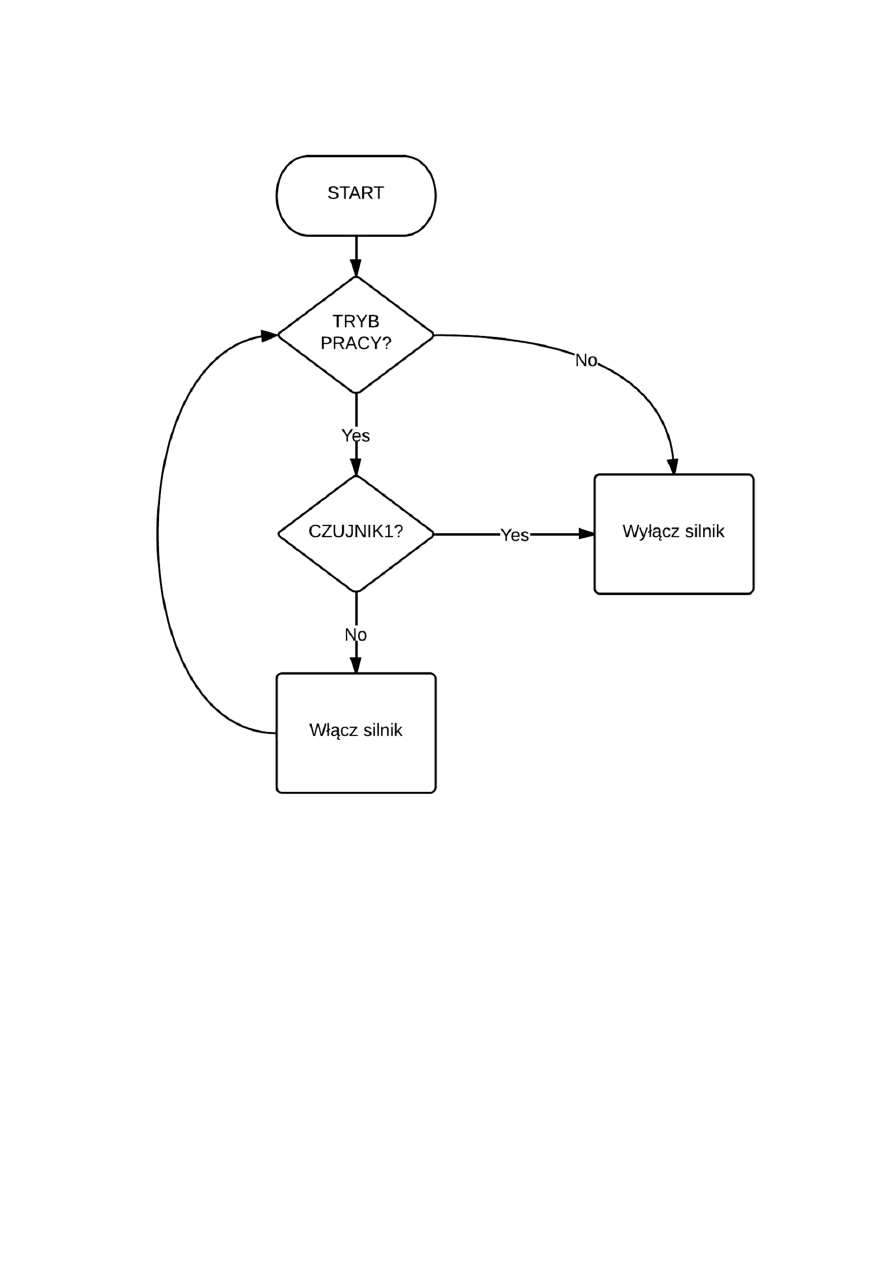
Algorytmy sterowania elementów wykonawczych:
Ilustracja 3: Algorytm sterowania taśmociągiem
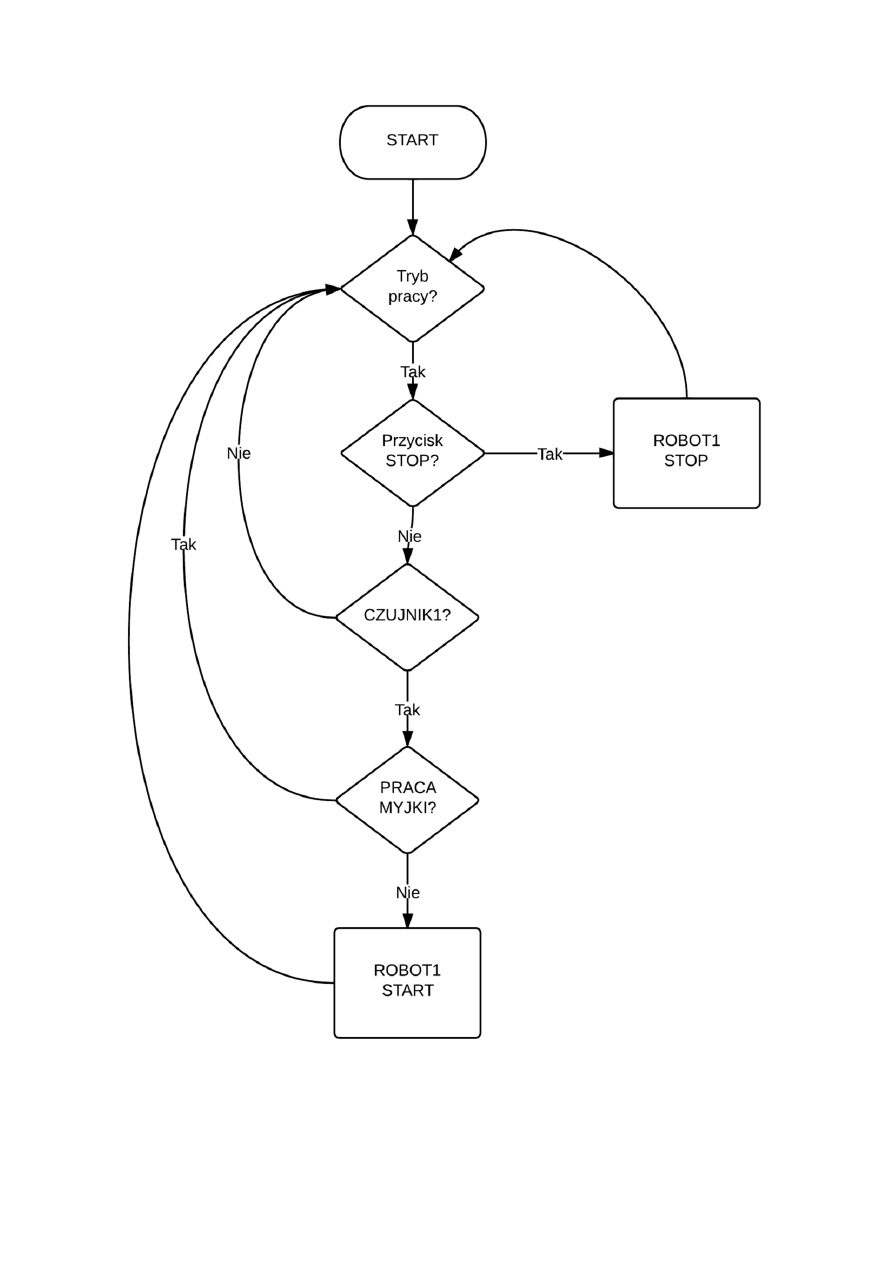
Ilustracja 4: Algorytm sterowania manipulatorem 1
Ilustracja 5: Algorytm sterowania siłownikiem myjki. Zegar wysterowuje naprzemiennie wyjścia
sterujące zaworem zwrotnym.
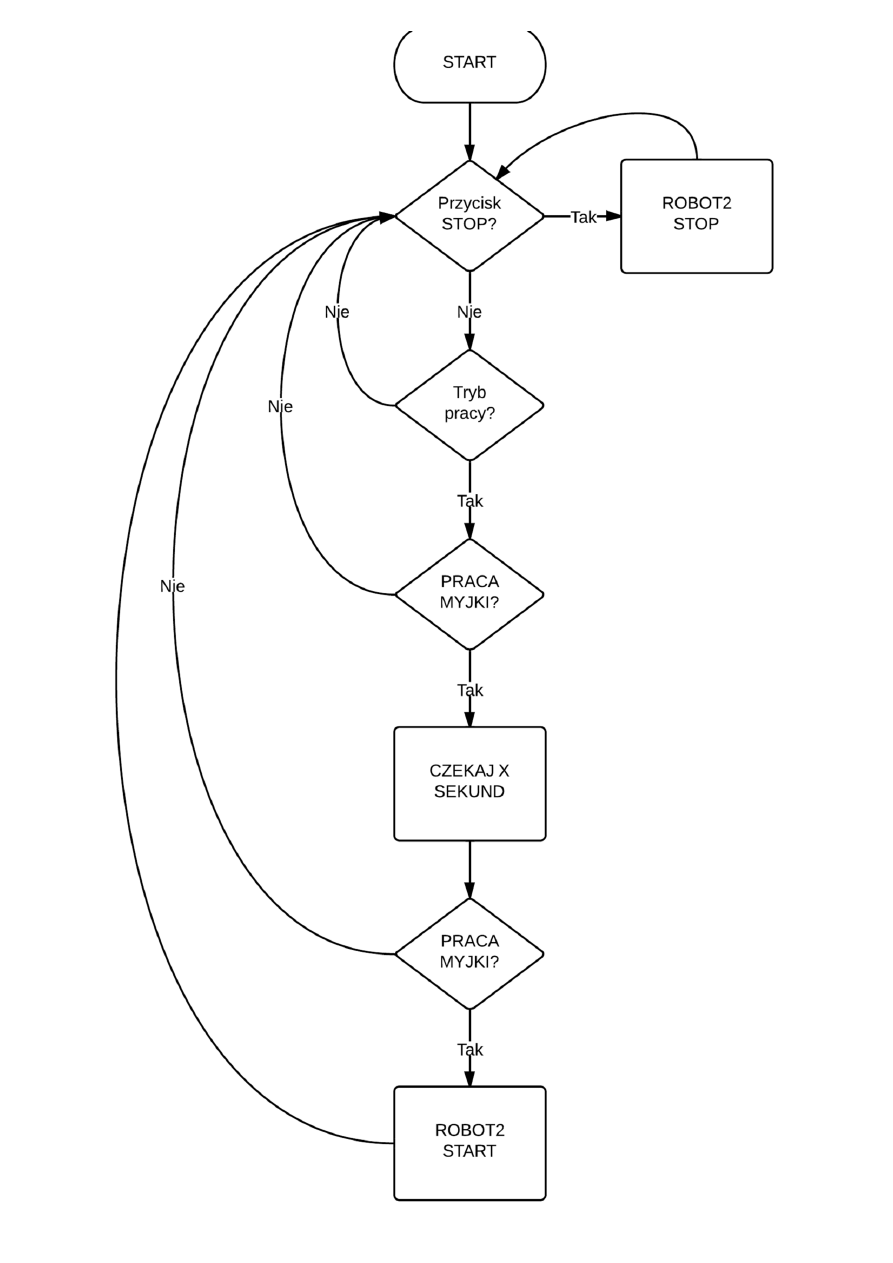
Ilustracja 6: Algorytm sterowanie manipulatorem 2

Zmienna TRYB PRACY jest przyjmuje wartość TAK po naciśnięciu przycisku START, oraz NIE
po naciśnięciu przycisku STOP (pamięć przycisku START, resetowana przyciskiem STOP).
Implementacja sterowania
Projekt zakłada 4 sygnały wejściowe do sterownika: przyciski START i STOP oraz dwa czujniki
położenia (np. indukcyjne). Sygnały wyjściowe to sygnał sterujący przekaźnikiem silnika
taśmociągu, sygnały START i STOP obydwu manipulatorów oraz sygnały sterujące zaworem
zwrotnym siłownika myjki. W sumie 4 wejścia i 7 wyjść.
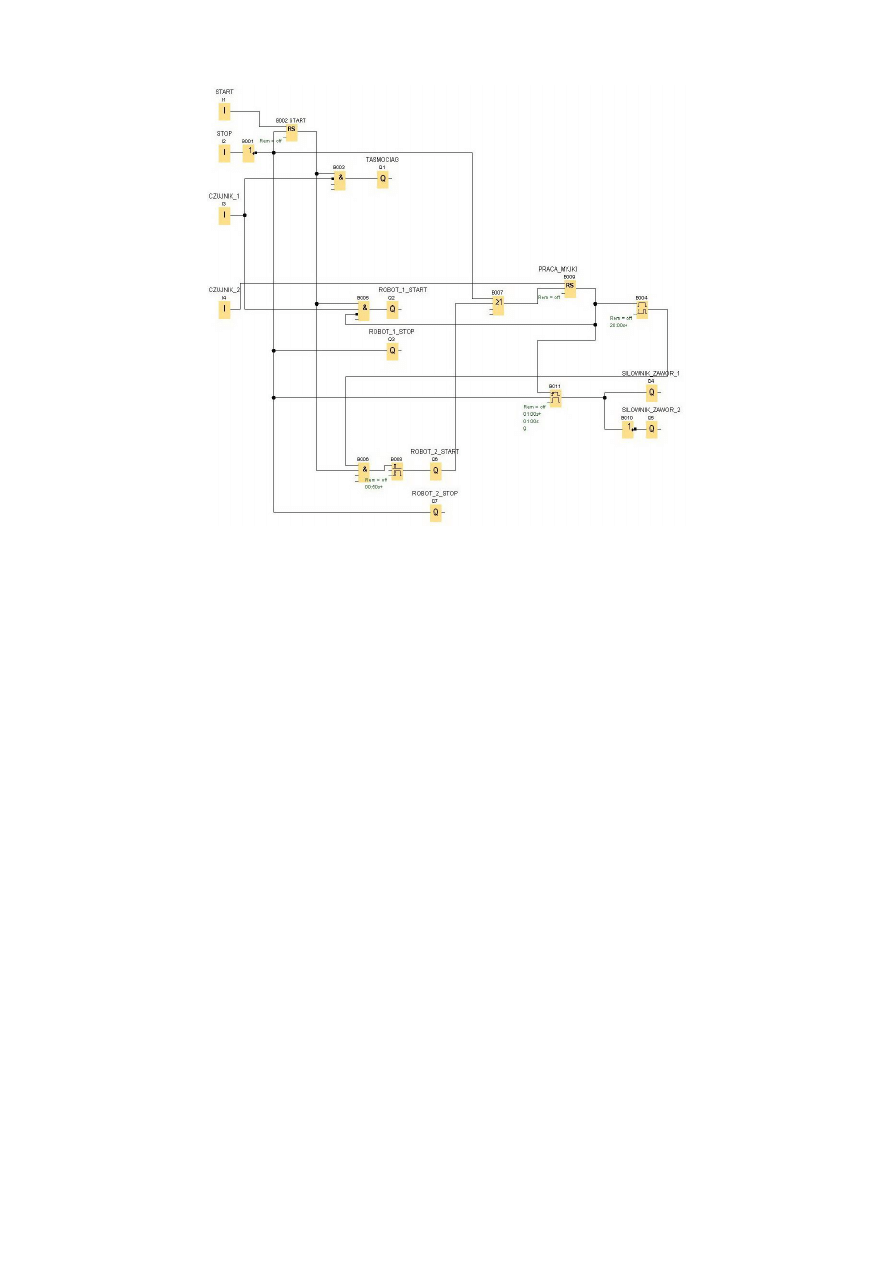
Sterowanie zaimplementowano na sterowniku PLC Siemens LOGO.
Wejścia sterownika:
I1 – Przycisk START
I2 – Przycisk STOP
I3 – Czujnik 1 (na końcu taśmociągu)
I4 – Czujnik 2 (w myjce)
Wyjścia sterownika:
Q1 – Sterowanie przekaźnikiem silnika taśmociągu
Q2 – ROBOT1 START
Q3 – ROBOT1 STOP
Q4 – Cewka 1 zaworu zwrotnego
Q5 – Cewka 2 zaworu zwrotnego
Q6 – ROBOT2 START
Q7 – ROBOT2 STOP
Na podstawie tych założeń stworzono diagram sterowania w programie LOGO Soft Comfort:
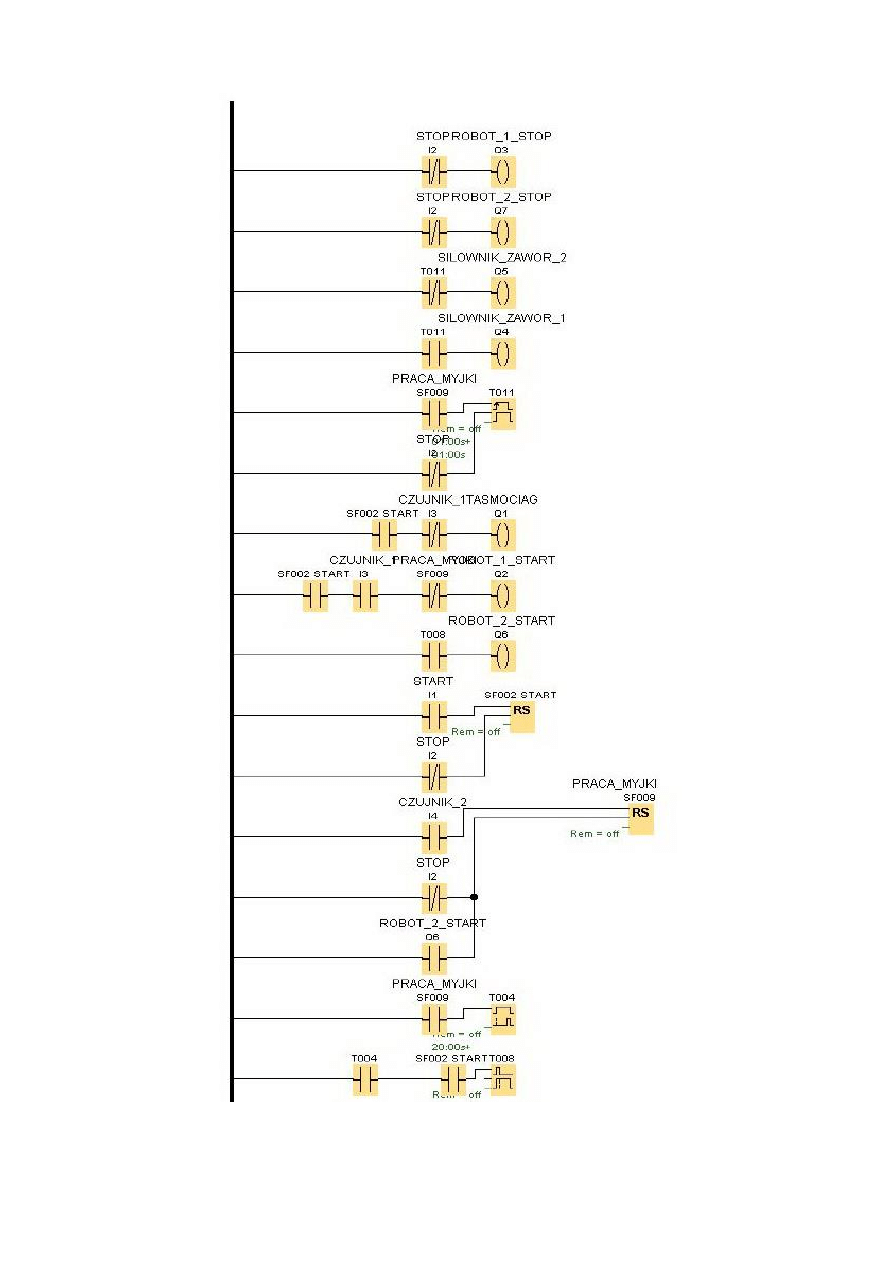
Schemat drabinkowy:
Implementacja elektryczna powinna zawierać rozwierny przycisk EMERGENCY POWER OFF,
odcinający zasilanie silnika taśmociągu i robotów, oraz wyłączający zawór odcinający siłownika
myjki.
Podsumowanie, wnioski
Dzięki wykorzystaniu pojedynczego sterownika, łatwo było zintegrować pracę poszczególnych
elementów. Układ działa poprawnie w środowisku symulacyjnym LOGO Soft Comfort.
Zaprojektowanie sterowania „od podstaw” pozwoliło nam na lepsze zrozumienie procesów
towarzyszących projektowaniu układów sterowania.
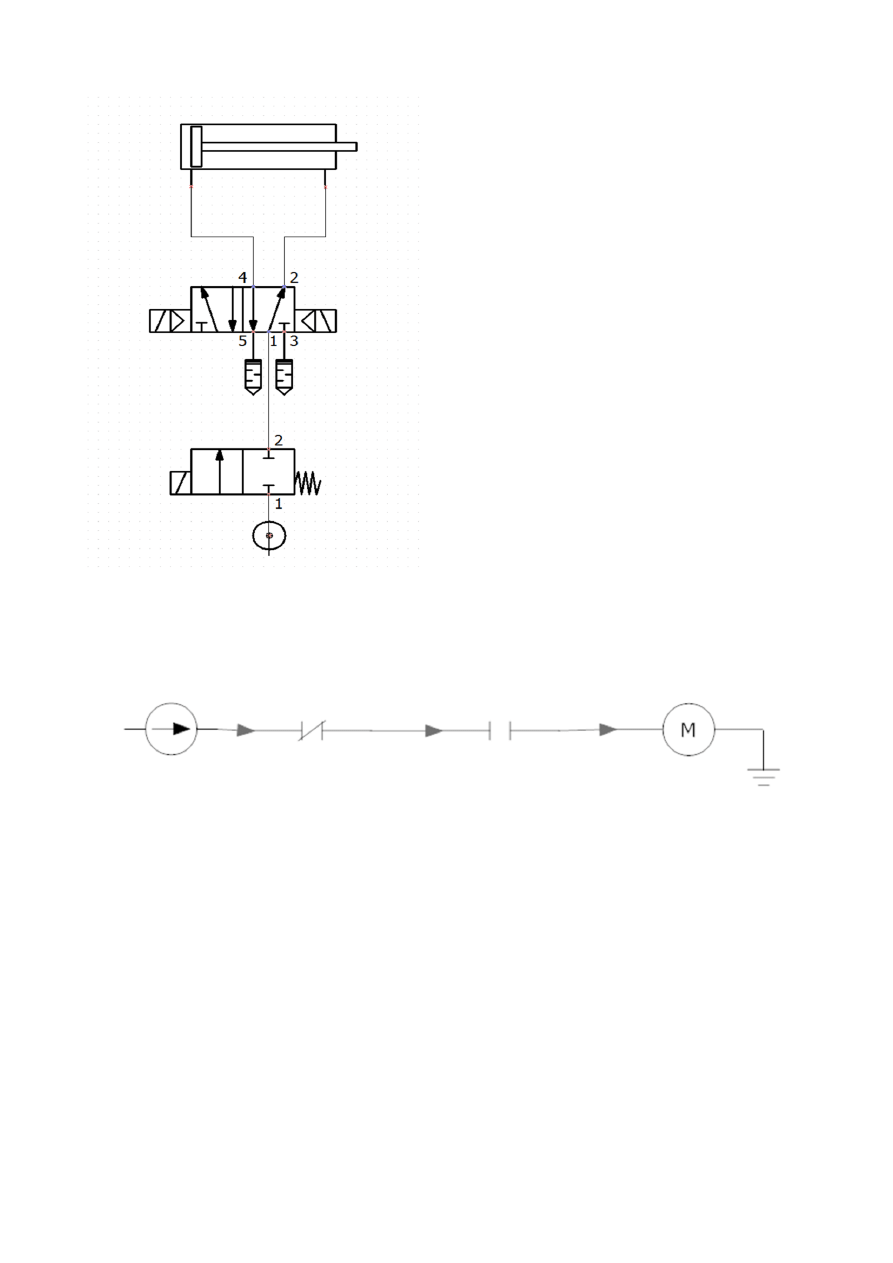
Ilustracja 7: Schemat układu wykonawczego
siłownika.
Ilustracja 8: Schemat układu wykonawczego silnika taśmociągu.
Wyszukiwarka
Podobne podstrony:
Symulacja układów sterowania z wykorzystaniem pakietu MATLAB, PWr W9 Energetyka stopień inż, III Sem
Projekt z lokalnych ukladow sterowania
Projekt i uruchomienie wybranych ukladow sterowania w napedzie elektrycznym
Projektowanie układów sterowania w urządzeniach i systemach mechatronicznych u
PROJEKTOWANIE UKŁADÓW STEROWANIA MASZYN
Projektowanie analogowych układów scalonych
projekt symulacje pspice polak
sprawozdanie 6 ?danie elektronicznych układów sterowania
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
lab, MetNum2 lab, Laboratorium: ANALIZA I PROJEKTOWANIE KOMPUTEROWE UKŁADÓW ELEKTRONICZNYCH
Obliczanie układów sterowanych prądowo i napięciowo
14 Eksploatowanie układów sterowania, sygnalizacji i łączności
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
więcej podobnych podstron