
1
Automatyka okrętowa – praca kontrolna
Część
Ι
- zestaw MECH/V
ΙΙΙ
1)
Jakie własności cechują ciągłe regulatory P , PD ?
2)
Przeanalizować własności elementu oscylacyjnego w zależności od wartości
współczynnika tłumienia
ξ
.
3)
Opisać metodę doboru nastaw wg Hanssena i Offereinsa oraz porównać tę metodę
z regułą doboru nastaw wg Zieglera – Nicholsa .
4)
Przedstawić schemat blokowy , zasadę działania , parametry charakteryzujące
przebieg wielkości regulowanej oraz konkretną realizację techniczną i
występujące w niej elementy dwustawnego układu regulacji ciśnienia .
5)
Analogowe i cyfrowe sposoby pomiaru prędkości obrotowej .
Ad 1) Jakie własności cechują ciągłe regulatory P , PD ?
Regulator proporcjonalny posiadający algorytm P , jest regulatorem
konwencjonalnym , mającym ciągły sygnał wyjściowy . Jego sygnał wyjściowy jest
2
proporcjonalny do sygnału wejściowego . Pracuje on zgodnie z prawem regulacji ,
które można przedstawić u(t)=k
p
ε
(t) . Transmitancja regulatora proporcjonalnego
wynosi G
p
(s)=k
p
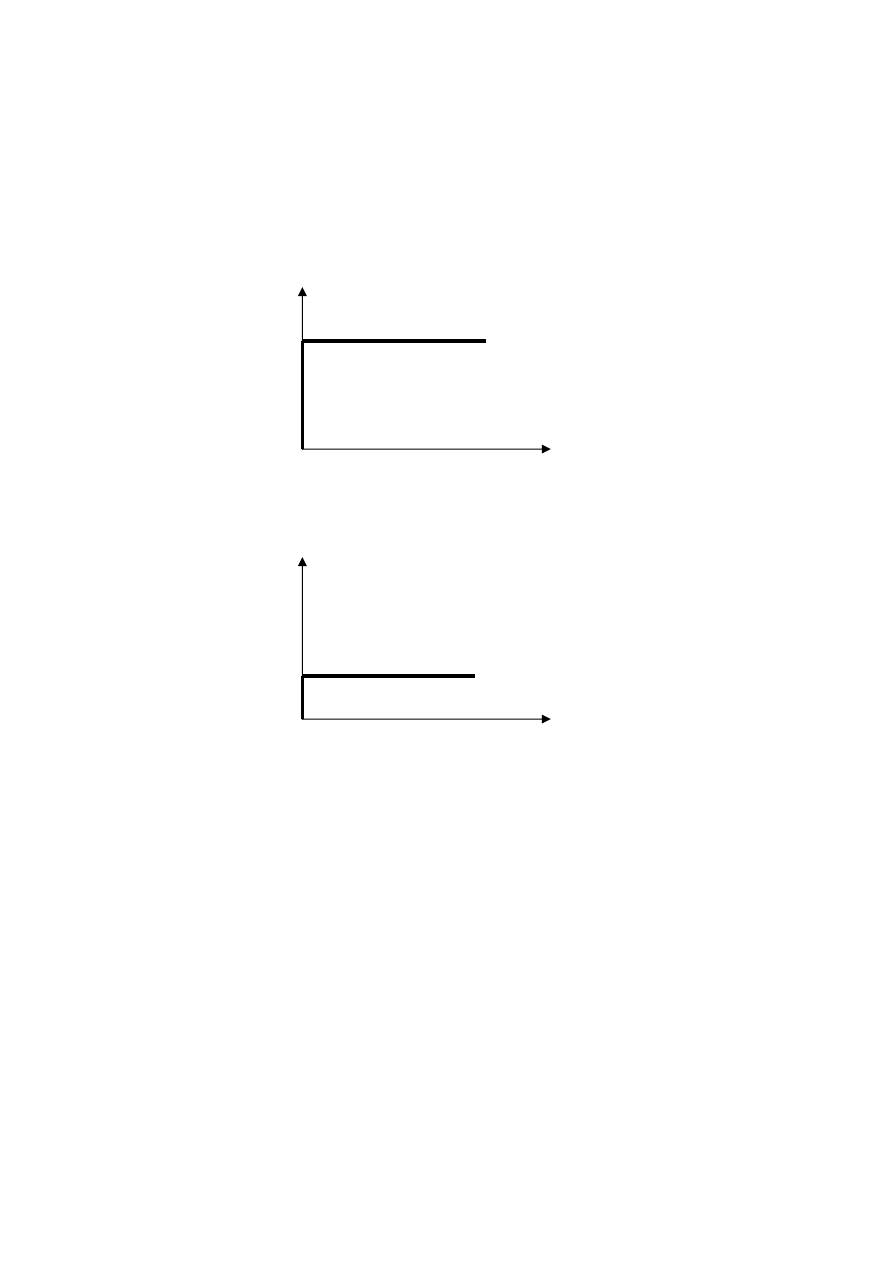
. Charakterystyka skokowa regulatora proporcjonalnego wygląda
następująco :
u(t)
k
p
t
Sygnał wyjściowy u(t) regulatora proporcjonalnego
ε
(t)
1(t)
t
Sygnał wejściowy
ε
(t)
Jedną z cech regulatorów proporcjonalnych jest to , że przy współpracy
regulatora z obiektem inercyjnym nie jest on w stanie sprowadzić błędu ustalonego
do zera . Wadą regulatorów typu P jest konieczność kompromisowego dobierania
wartości współczynnika wzmocnienia . Mały współczynnik wzmocnienia powoduje
długi czas regulacji oraz daje duży błąd w stanie ustalonym , natomiast duży
współczynnik wzmocnienia powoduje powstanie przebiegów silnie oscylacyjnych .
Wymagania dokładności statycznej (małego błędu) oraz stabilność układu
automatycznej
regulacji
są
wzajemnie
sprzeczne
.
Nastawa
regulatora
proporcjonalnego wynika więc bezpośrednio z kompromisu pomiędzy wymaganiami
stabilności i dokładności w stanie ustalonym .

3
Regulatory proporcjonalne są stosowane do regulacji następujących obiektów
oraz układów :
•
obiekty o niedużych wartościach stałych czasowych i małych opóźnieniach
oraz stałych zakłóceniach działających na układ
•
w układach gdzie dopuszczalny jest błąd w stanie ustalonym
•
w układach regulacji kaskadowej jako regulatory pomocnicze
•
elementy regulatorów o złożonych charakterystykach
Podstawową zaletą regulatorów proporcjonalnych jest ich duża szybkość działania .
Wielkością jaką charakteryzują się regulatory typu P jest współczynnik
wzmocnienia k
p
oraz zakres proporcjonalności wyrażony zależnością :
x
p
=
1
k
p
100%
Zakres proporcjonalności określa , przy jakim zakresie zmian sygnału uchybu (który
jest sygnałem wejściowym regulatora) jest zachowana proporcjonalność między
wartością sygnału uchybu , a wartością sygnału wyjściowego regulatora
proporcjonalnego .
Regulator proporcjonalno – różniczkujący ( PD ) .
Regulator o algorytmie PD jest konwencjonalnym regulatorem posiadającym
ciągły sygnał wyjściowy . W idealnym regulatorze PD sygnał wyjściowy u(t) jest
proporcjonalny do sumy sygnału wejściowego
ε
(t) oraz do pochodnej tego sygnału :
u(t)=k
p
[
ε
(t)+T
d
( )
d t
dt
ε
]
k
p
– współczynnik wzmocnienia
T
d
– czas różniczkowania regulatora
Charakterystyka skokowa regulatora PD :
u(t)
∞
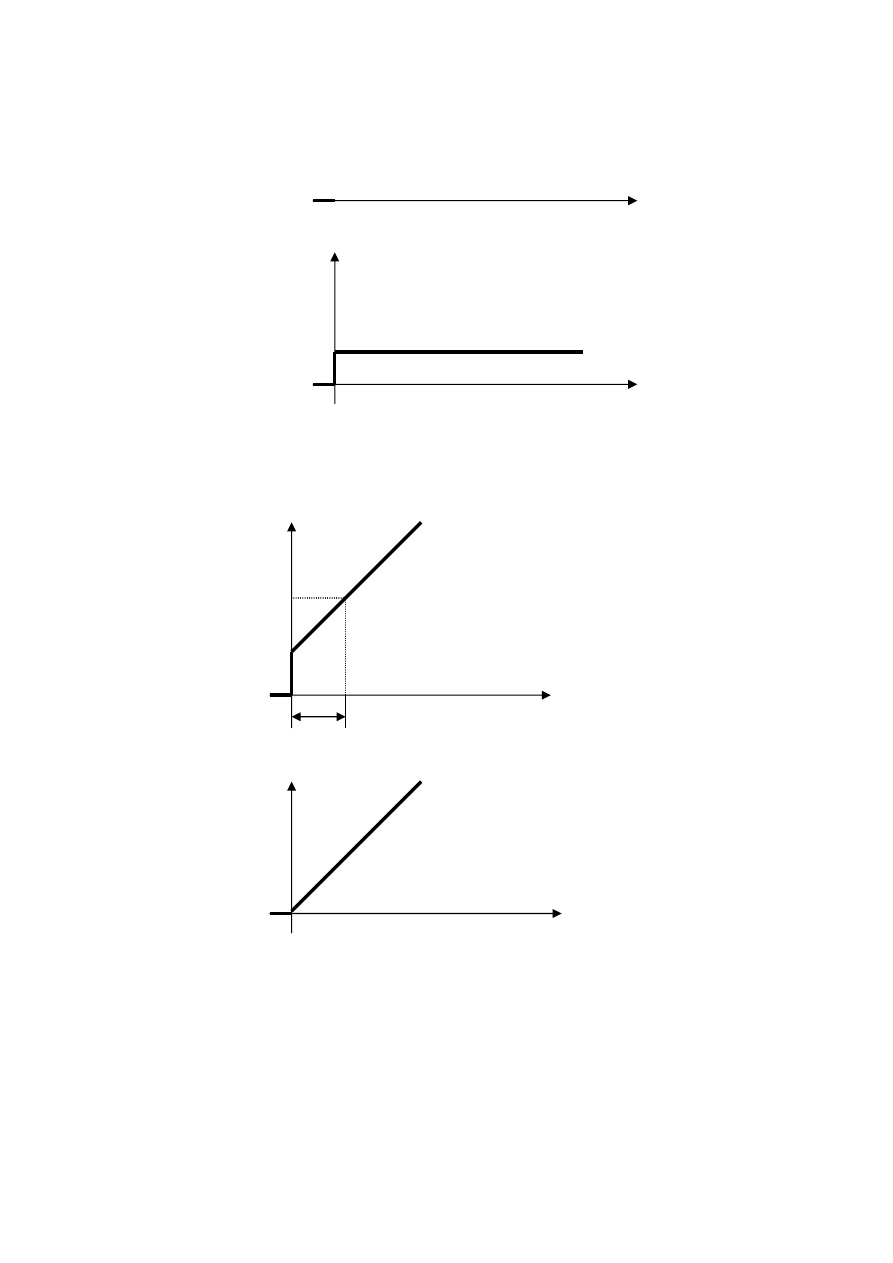
4
k
p
t
ε
(t)
1(t)
t
Odpowiedź skokowa u(t) idealnego regulatora PD .
u(t)
2k
p
A
t
T
d
k
p
A
t
T
d
0
t
T
d
ε
(t)
ε
(t)=A
1
t
0
t
Odpowiedź regulatora PD na sygnał liniowo narastający .
T
d
– czas różniczkowania – jest to czas który określa właściwości części
różniczkującej regulatora i jest liczbowo równy stałej czasowej różniczkowania .
Różniczkowanie powoduje wprowadzenie do sygnału wyjściowego regulatora
składnika proporcjonalnego do szybkości zmian uchybu , a więc w przypadku stałej
5
szybkości zmian uchybu sygnał ulega jak gdyby wyprzedzeniu w stosunku do
składnika proporcjonalnego w sygnale regulatora , ponieważ w składniku
proporcjonalnym uwzględnia się tylko aktualną wartość uchybu .
Podstawową zaletą regulatora PD jest poprawa właściwości dynamicznych
regulatora , wskutek działania elementu różniczkującego . Dzięki temu działaniu
regulator skutecznie reaguje na pojawienie się zakłóceń , co eliminuje powstawanie
przebiegów oscylacyjnych . Zapewniona jest równocześnie dobra regulacja w
szerokim paśmie częstotliwości . Regulator PD nie jest jednak w stanie sprowadzić
do zera uchybu regulacji ale zmniejsza przeregulowanie i skraca czas regulacji .
Stosowane są tego typu regulatory do regulacji obiektów o średnich wartościach
stałych czasowych poddanych działaniu małych i szybkich zakłóceń .
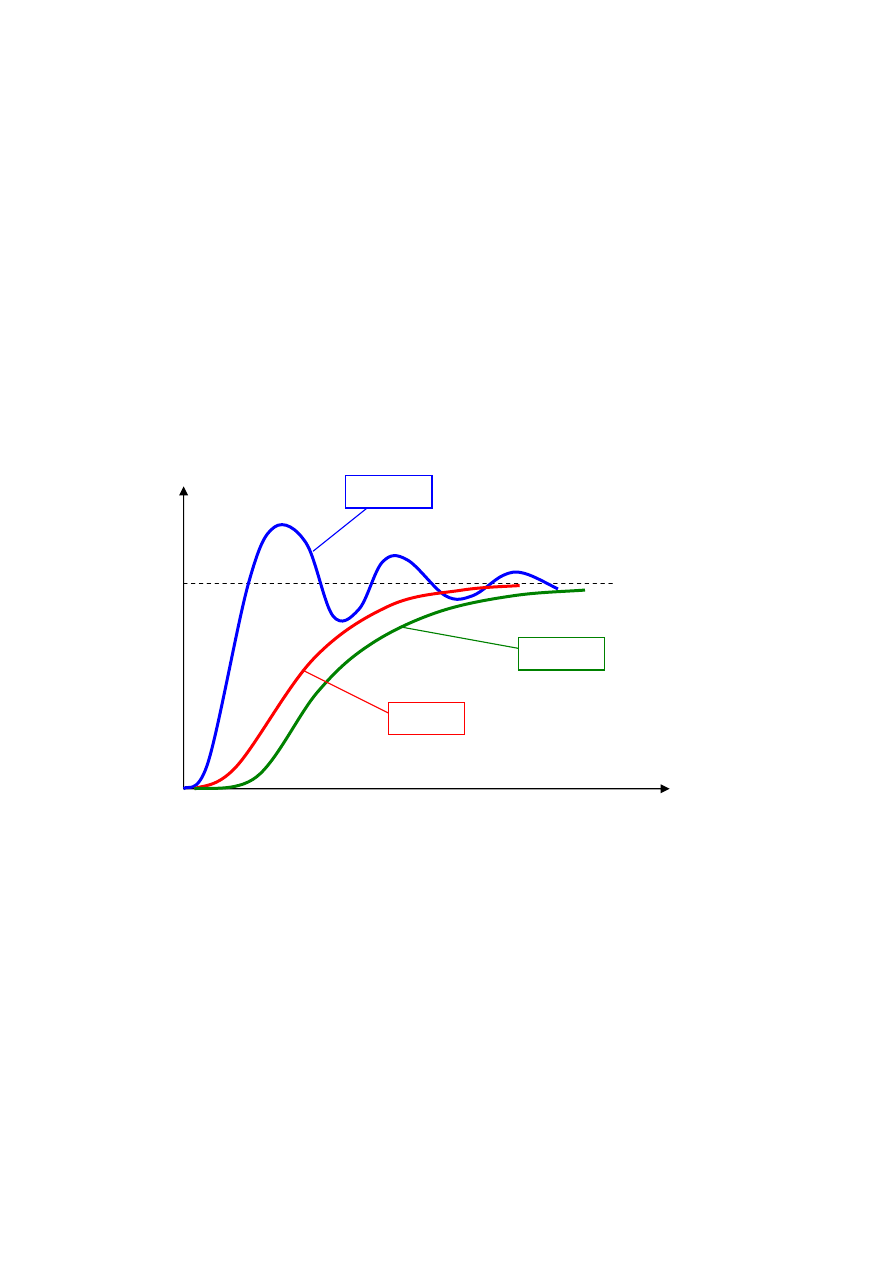
Ad 2 ) Przeanalizować własności elementu oscylacyjnego w zależności od wartości
współczynnika tłumienia
ξ
.
Ogólna postać równania różniczkowego , które ułatwia interpretację
przebiegów przejściowych elementu oscylacyjnego jest następująca :
d y
dt
2
2
2
+
ξω
0
dy
dt
+
ω
ω
0
2
0
2
y
k
x
=
przy czym
ξ
< 1 . Transmitancja wówczas ma postać :
G s
y s
x s
k
s
s
( )
( )
( )
=
=
+
+
ω
ξω
ω
0
2
2
0
0
2
2
k – współczynnik proporcjonalności
ω
=
1
1
T
– pulsacja oscylacji własnych elementu ,
ξ
=
T
T
2
1
2
– zredukowany
(względny) współczynnik tłumienia
T
1
, T
2
– stałe czasowe elementu
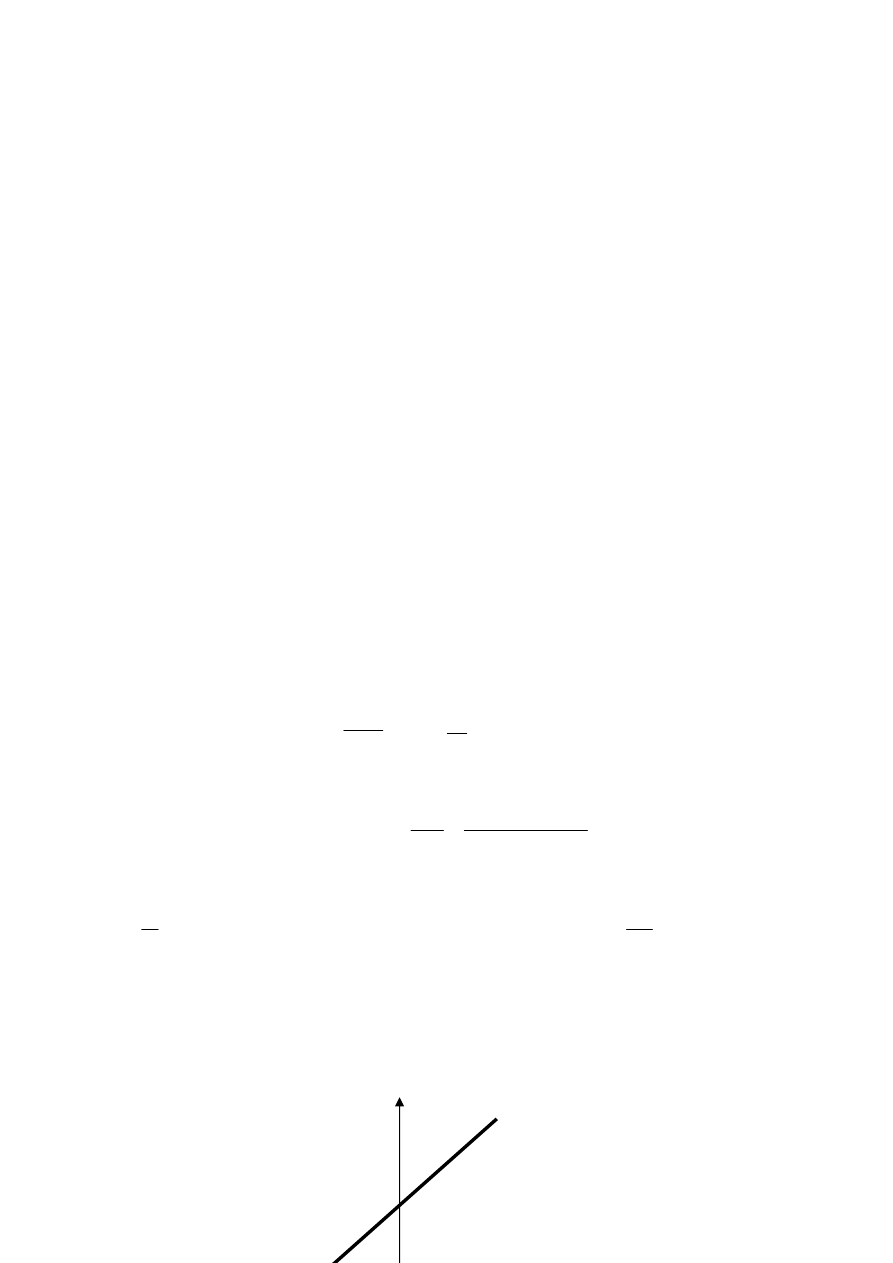
Charakterystyka statyczna elementu oscylacyjnego :
y
6
x
Współrzędne odchyłek .
y
0
C
x
0
Współrzędne wartości absolutnych .
Odpowiedź na wymuszenie skokowe będzie mieć charakter oscylacyjny , jeżeli
spełniony jest warunek :
T
2
2
< 4T
1
2
lub co jest jednoznaczne :
ξ
< 1
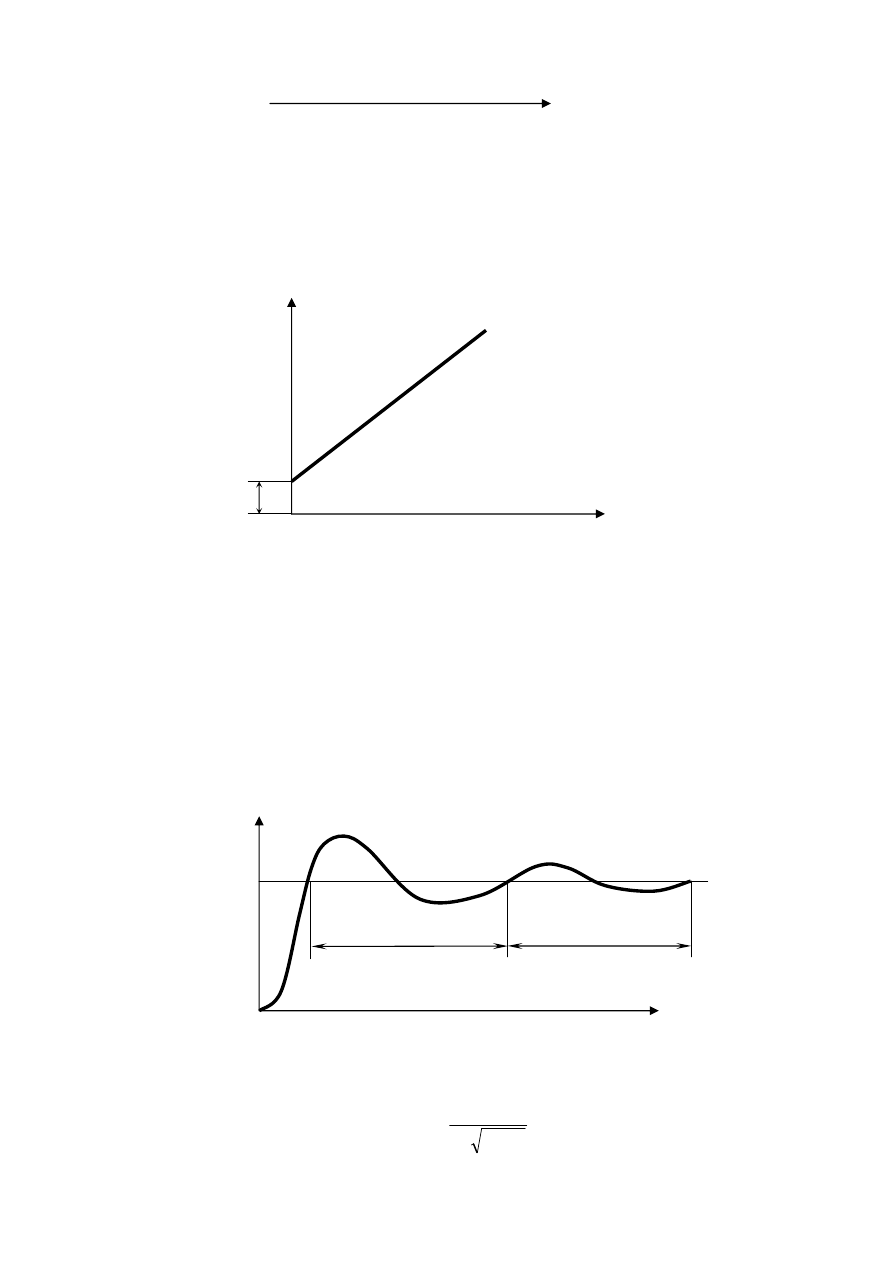
Odpowiedź elementu oscylacyjnego na wymuszenie skokowe 1(t)x
st
wygląda
następująco :
y
kx
st
T
T
t
Składowa ustalona przebiegu wynosi kx
st
, a składowa przejściowa jest gasnącą
sinusoidą , której okres jest stały i wynosi :
T
=
−
2
1
0
2
π
ω
ξ
7
W przypadku szczególnym , kiedy
ξ
= 0 ( tzn. T
2
= 0 ) , występują drgania
zachowawcze ( nie tłumione ) o pulsacji
ω
0
. Jeżeli T
2
2
> 4T
1
2
, czyli
ξ
> 1 , to
przebieg y(t) traci charakter oscylacyjny . Składowa przejściowa przebiegu jest
wówczas sumą dwóch krzywych wykładniczych , zatem y(t) osiąga aperiodycznie
wartość ustaloną kx
st
.
Jeżeli T
2
2
= 4T
1
2
, czyli
ξ
= 1 , występuje tzw. tłumienie krytyczne . Jest to
również przebieg aperiodyczny , podobnie jak dla przypadku T
2
2
> 4T
1
2
.
W przypadku kiedy nie występują przebiegi oscylacyjne , tzn. dla
(
)
T
T
2
2
1
2
4
1
≥
≥
ξ
, elementy traktuje się jako inercyjne drugiego rzędu .
k
t
Odpowiedzi elementu oscylacyjnego w zależności
od współczynnika tłumienia
ξ
.
Ad 3 ) Opisać metodę doboru nastaw wg Hanssena i Offereinsa oraz porównać tę
metodę z regułą doboru nastaw wg Zieglera – Nicholsa .
ξ
> 1
ξ
≤
1
ξ
= 1

8
Metody ścisłej analizy teoretycznej , które umożliwiają wyznaczenie
dowolnych właściwości układu automatycznej regulacji , nie nadają się do
wyznaczania wartości nastaw regulatorów uniwersalnych . Podstawowym
problemem dotyczącym doboru parametrów regulatorów jest taki dobór wartości
nastaw , przy których uzyskujemy zadowalające działanie układu . Najbardziej
rozpowszechnionymi metodami są metoda Zieglera – Nicholsa oraz metoda
Hanssena i Offereinsa .
Stosując metodę Zieglera – Nicholsa , regulator połączony z obiektem ustawia
się na działanie proporcjonalne (P) . Działanie całkujące i różniczkujące powinny być
wyłączone przez nastawienie T
i
=
∞
oraz T
d
= 0 . Następnie zwiększając stopniowo
wzmocnienie k
p
regulatora doprowadza się układ do granicy stabilności , czyli aż do
wystąpienia oscylacji niegasnących w układzie . Notując wartość współczynnika
wzmocnienia regulatora k
kr
, przy którym powstają oscylacje , oraz okres t
osc
tych
oscylacji , przyjmuje się odpowiednio :
•
dla regulatora typu P – k
p
= 0,5 k
kr
•
dla regulatora typu PI – k
p
= 0,45 k
kr
, T
i
= 0,85 t
osc
•
dla regulatora typu PID – k
p
= 0,6 k
kr
, T
i
= 0,5 t
osc
, T
d
= 0,12 t
osc
Metoda Zieglera – Nicholsa ma ścisły związek z korekcją charakterystyk
dynamicznych . Uzależnia ona zalecaną wartość wzmocnienia regulatora od
wzmocnienia krytycznego układu bez korygowanych charakterystyk dynamicznych
oraz punkty załamań charakterystyki dynamicznej regulatora od wartości
częstotliwości krytycznej układu bez korekcji . Zaletą tej metody są obliczone
wartości nastaw które gwarantują stabilność układu regulacji .
Metoda doboru nastaw regulatorów według Hannsena i Offereinsa ściśle opiera
się na metodzie Zieglera – Nicholsa . Zasadniczą różnicą jest pominięcie w metodzie
Hannsena i Offereinsa pomiaru okresu oscylacji .
Regulator typu PI nastawia się w następujący sposób :
•
nastawić czas całkowania T
i
=
∞
( max )

9
•
doprowadzić układ do granicy stabilności i określić k
pkryt
, zwiększając
współczynnik wzmocnienia regulatora k
p
•
przyjąć nastawę k
p
= 0,45 k
pkryt
•
zmniejszać czas całkowania T
i
do wartości T
ikryt
, przy której występuje
niestabilność układu
•
nastawić T
i
= 3 T
ikryt
W przypadku regulatora typu PID należy :
•
wykonać wszystkie czynności jak dla regulatora PI
•
zwiększać czas różniczkowania T
d
do wartości T
dmax
, przy której występuje
maksymalne tłumienie
•
nastawić
T
T
d
d
=
max
3
•
ustawić czas całkowania T
i
= 4,5 T
d
•
zmniejszyć k
p
aż do uzyskania pożądanego tłumienia
Ad 4 ) Przedstawić schemat blokowy , zasadę działania , parametry charakteryzujące
przebieg wielkości regulowanej oraz konkretną realizację techniczną i występujące w
niej elementy dwustawnego układu regulacji ciśnienia .
Regulacja dwupołożeniowa jest to taka regulacja , której sygnał błędu
przerabiany jest na sygnał sterujący obiektem który przyjmuje tylko dwie wartości .
Przykładem układu regulacji ciśnienia z wykorzystaniem regulacji
dwupołożeniowej jest układ regulacji ciśnienia pary w kotle . Charakterystyczną
cechą takiego sposobu regulacji jest wykonywanie przez wielkość regulowaną , w
tym przypadku ciśnienie pary , ciągłych oscylacji wokół wartości zadanej (y
0
) .
Wykonywane oscylacje nie są objawem utraty stabilności przez układ , a amplituda
tych oscylacji nie zależy od wartości zadanej .
Przebieg wielkości regulowanej y(t) w układzie regulacji dwupołożeniowej :
y
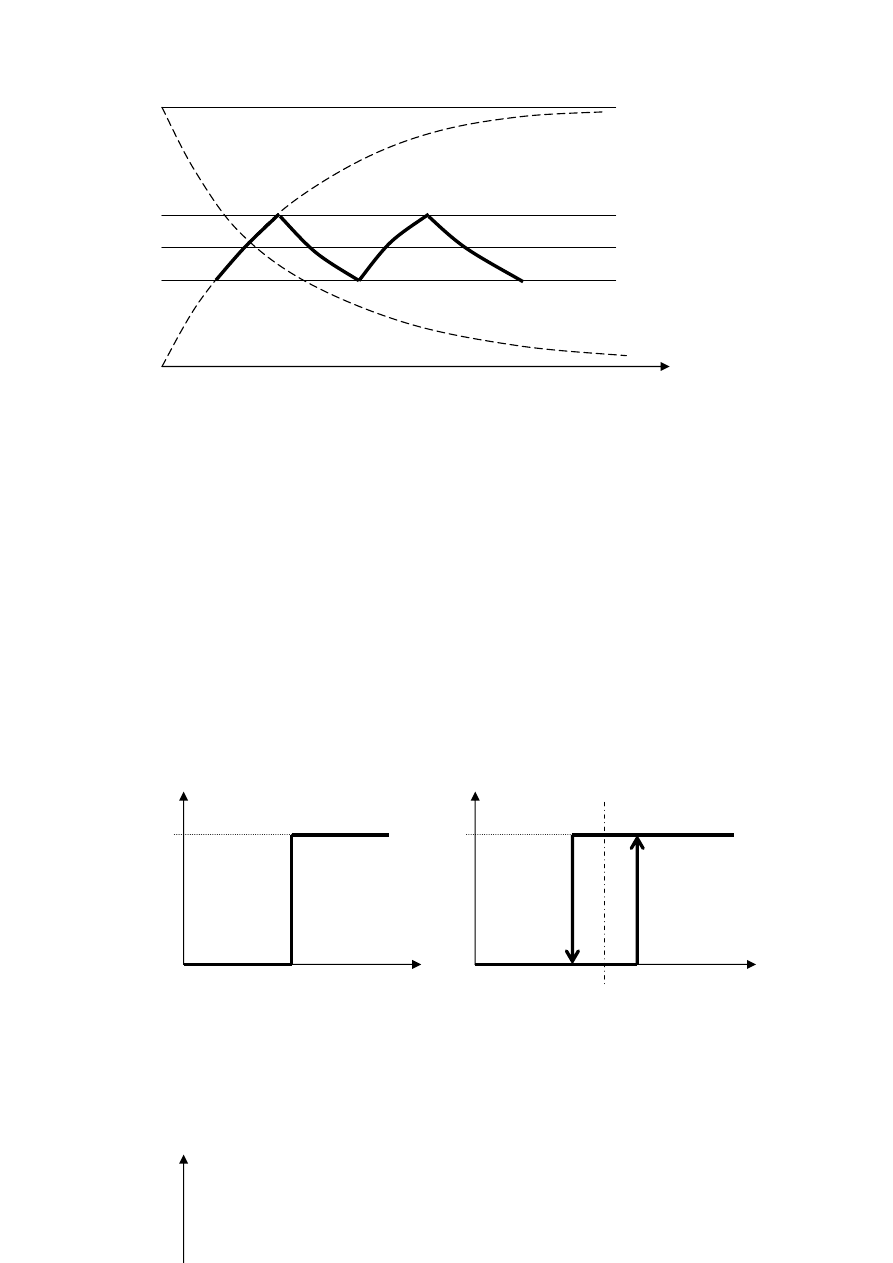
10
y
u
y
2
y
0
y
1
t
y
0
– wartość zadana
y
1
– minimalna wartość ciśnienia pary – następuje załączenie palnika
y
2
– maksymalna wartość ciśnienia pary – następuje wyłączenie palnika
Przebieg y(t) składa się z kolejnych odcinków odpowiedzi elementu
inercyjnego na wymuszenie skokowe , którymi są załączenia i wyłączenia palnika .
W układzie regulacji ciśnienia pary w kotle elementem dwustawnej regulacji
jest palnik załączający się okresowo , to znaczy w przypadku nadmiernego spadku
ciśnienia pary . Rolę regulatora spełnia w tym układzie przekaźnik dwupołożeniowy ,
który powoduje załączenie i wyłączenie palnika przy odpowiednich ciśnieniach pary .
x
x
x
max
x
max
1
2
1
2
x
min
y x
min
y
y
0
y
0
Charakterystyki statyczne regulatorów dwupołożeniowych : a) idealnego
b) z histerezą ; 1 – zestyk zamknięty , 2 – zestyk otwarty
Przebieg sygnału wyjściowego regulatora dwupołożeniowego :
x
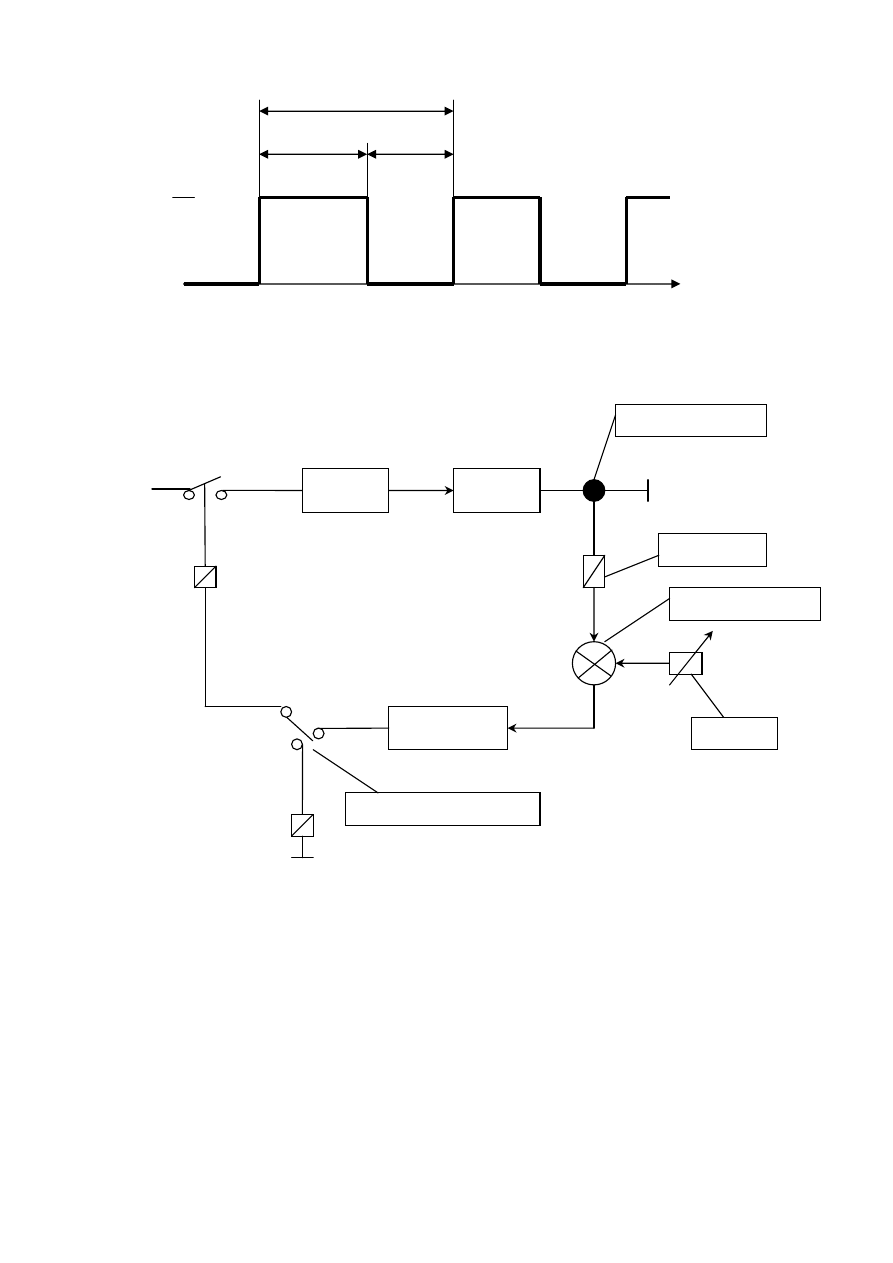
11
T
t
a
t
b
x
max
x
min
t
Schemat blokowy przedstawiający układ regulujący ciśnienie pary w kotle :
A
R
W przedstawionym wyżej układzie znajduje się element który dokonuje
pomiaru wielkości regulowanej ( ciśnienie pary w kotle ) . Sygnał wysyłany z tego
elementu trafia do przetwornika , gdzie zostaje zamieniony na sygnał
znormalizowany .
Przykładem przetwornika może być urządzenie które składa się z czujnika w postaci
rurki Bourdona i przetwornika pośredniego , działającego na zasadzie kompensacji
sił. Sygnałem wyjściowym jest siła proporcjonalna do mierzonego ciśnienia . Siła ta
Palnik
Kocioł
Regulator
Pomiar ( czujnik )
Przetwornik
Węzeł porównujący
Zadajnik
Przełącznik rodzaju pracy

12
przetwarzana jest w przetworniku pośrednim na sygnał pneumatyczny w postaci
ciśnienia wyjściowego z przetwornika . Następnie sygnał ten dochodzi do węzła
porównującego . Zadaniem tego elementu jest zbadanie różnicy pomiędzy wartością
zadaną , a wartością rzeczywistą . W przypadku niższego ciśnienia pary w kotle od
ciśnienia zadanego , regulator powoduje uruchomienie palnika . Istnieje również
możliwość wybrania rodzaju pracy poprzez specjalny przełącznik wyboru rodzaju
pracy ( ręczna lub automatyczna ) .
Ad 5 ) Analogowe i cyfrowe sposoby pomiaru prędkości obrotowej .
Pomiaru prędkości kątowej możemy dokonać za pomącą czujników , które w
zależności od rozwiązania ich konstrukcji mogą być tachometrami analogowymi lub
cyfrowymi .
1)
Analogowe czujniki prędkości obrotowej .
a)
Tachometr pneumatyczny .
W tachometrze tym sygnałem wyjściowym jest ciśnienie powietrza p
m
.
Tachometr składa się z cylindra 1 obracającego się dookoła osi 2 . W cylindrze
umieszczony jest tłoczek 3 pozostający pod działaniem siły odśrodkowej
równoważnej siłą od ciśnienia przepływającego przez cylinder powietrza . Ciśnienie
to zależy od stopnia przymknięcia otworu 4 przez tłoczek i jest miarą prędkości
kątowej , z jaką obraca się cylinder .
p
m
= C
ω
2
C – stała przyrządu
b) Tachometr hydrauliczny .

13
Na podobnej zasadzie jak tachometr pneumatyczny działa również tachometr
hydrauliczny . Wielkością wejściową jest prędkość kątowa
ω
wałka 1 , a wyjściową
ciśnienie oleju p
m
. Wałek 1 napędza zębatą pompę olejową 2 i obraca element 3 .
Wydajność pompy jest proporcjonalna do prędkości
ω
, a ciśnienie p
m
zależy od
otwarcia zaworu 4 . Otwarcie to uwarunkowane jest zrównaniem się sił działających
na tłoczek 5 : siły odśrodkowej i siły od ciśnienia p
m
.
2)
Cyfrowe sposoby pomiaru prędkości obrotowej .
W cyfrowy układ pomiaru prędkości obrotowej wyposażony jest cyfrowy
regulator prędkości obrotowej stosowany na spalinowych silnikach okrętowych :
regulator EGS 2000 . System pomiaru prędkości obrotowej Tacho jest wewnętrznym
systemem tego regulatora i pozwala na pomiar prędkości kątowej wału silnika .
Umieszczony jest on bezpośrednio przy kole zamachowym silnika . System zawiera
w sobie między innymi dwa czujniki indukcyjne zamocowane na wsporniku tak jak
pokazuje to rysunek . Czujniki te reagują na przesuwające się zęby obracającego się
koła zamachowego . Pozostała część systemu znajduje się w jednostce centralnej
regulatora i zawiera układ elektroniczny którego zadaniem jest szybkie przetwarzanie
sygnałów wysyłanych przez czujniki . Umieszczenie dwóch czujników przy kole
zamachowym spowodowane jest stworzeniem pewnej rezerwy w postaci jednego z
tych czujników . Pomiaru dokonuje tylko jeden z zamontowanych czujników .
Rejestruje on przesunięcie każdego zęba koła zamachowego i wysyła impulsy do
wejściowych obwodów tachometrycznych w jednostce centralnej . Częstotliwość
impulsów jest przetwarzana przez system EGS 2000 na prędkość obrotową . Odczyt
prędkości może być dokonywany na wyświetlaczu jednostki sterującej .
Wyszukiwarka
Podobne podstrony:
Automatyka okrętowa – praca kontrolna 2
Automatyka okrętowa – praca kontrolna 4
Automatyka okrętowa – praca kontrolna 3
Automatyka okrętowa – praca kontrolna 2
PRACA KONTROLNA, na studia, procesy decyzyjne
elektronika praca kontrolna, EiE labo, Energoelektronika1
PRACA KONTROLNA I UZUPEŁNIAJĄCE UZ LICEUM OGÓLNOKSZTAŁCĄCE SEMESTR I
Ekologistyka praca kontrolna
Praca kontrolna Użytkowanie komputera
Praca kontrolna 1 KKZ 13
LU 2010 2011 Praca kontrolna nr 3 z jezyka polskiego
III Praca Kontrolna ogarnijtemat com
Praca kontrolna nr 2I id 382664 Nieznany
praca kontrolna lo semestr II
ULO ch 3s praca kontrolna, semestr 3
Praca kontrolna Marketnig w służbie zdrowia, HIGIENISTKA STOMATOLOGICZNA
PRACA KONTROLNA Z ZAJĘC PRAKT Z TECH ROLN2-nawozenie, R3 semestr 1 rolnik
Praca kontrolna Fizyka ULO 2
więcej podobnych podstron