Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
1
6.
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
6.1. Wyznaczanie przemieszczeń z zastosowaniem równań pracy wirtualnej w układach
prętowych
W metodzie pracy wirtualnej, przy obliczaniu przemieszczeń w miejscu, w którym chcemy wyliczyć
zadane przemieszczenie przykładamy jednostkową siłę uogólnioną zgodną z kierunkiem i zwrotem szukanego
przemieszczenia.
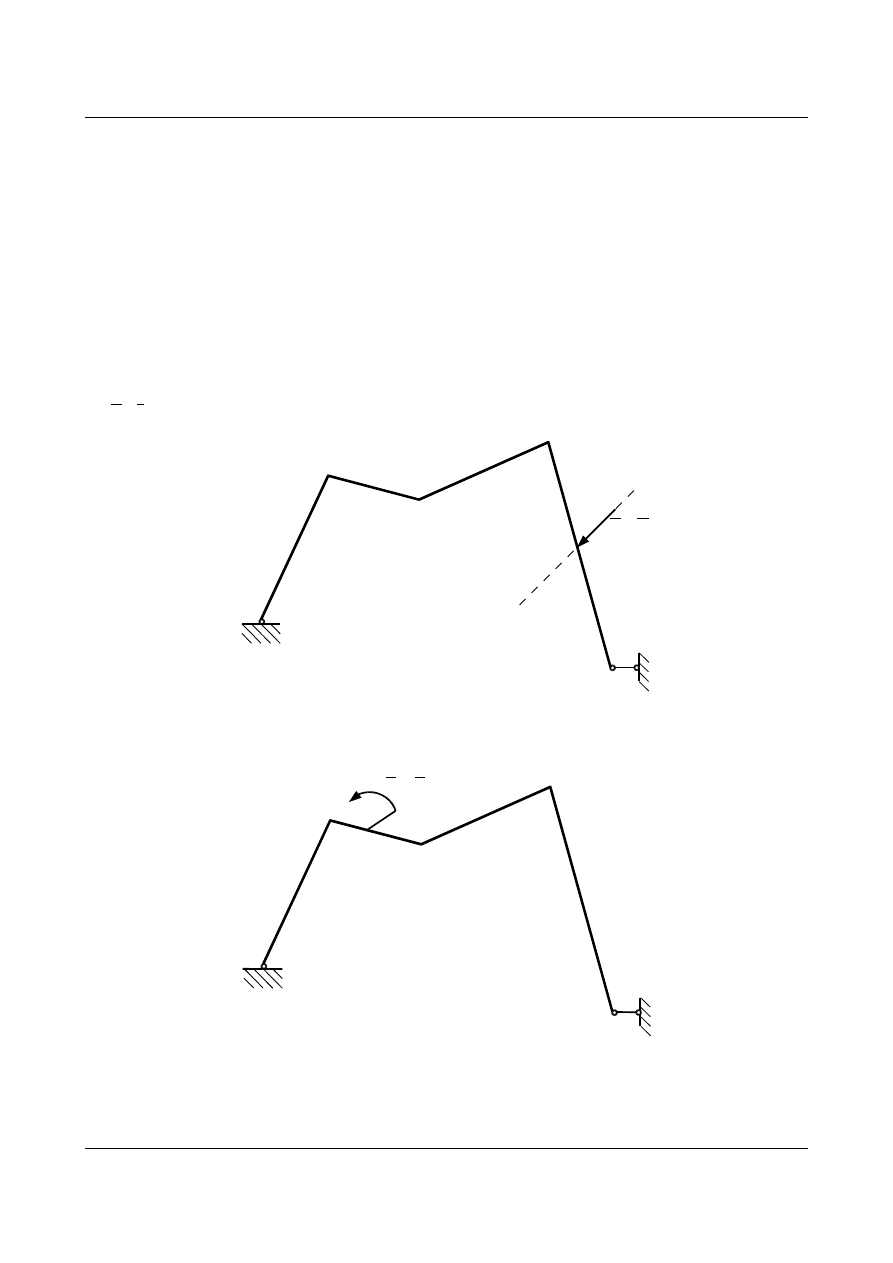
W zależności od rodzaju szukanego przemieszczenia stosujemy różne typy obciążeń:
•
aby wyznaczyć przemieszczenie liniowe punktu
A po kierunku prostej m układ obciążamy siłą skupioną
P
=1
A
m
P = 1
•
obrót przekroju
A obliczamy przykładając skupiony moment wirtualny:
A
M = 1
•
wzajemny obrót przekrojów w punktach
A i B uzyskamy obciążając układ przeciwnie zwróconymi
momentami:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
2
A
B
M = 1
M = 1
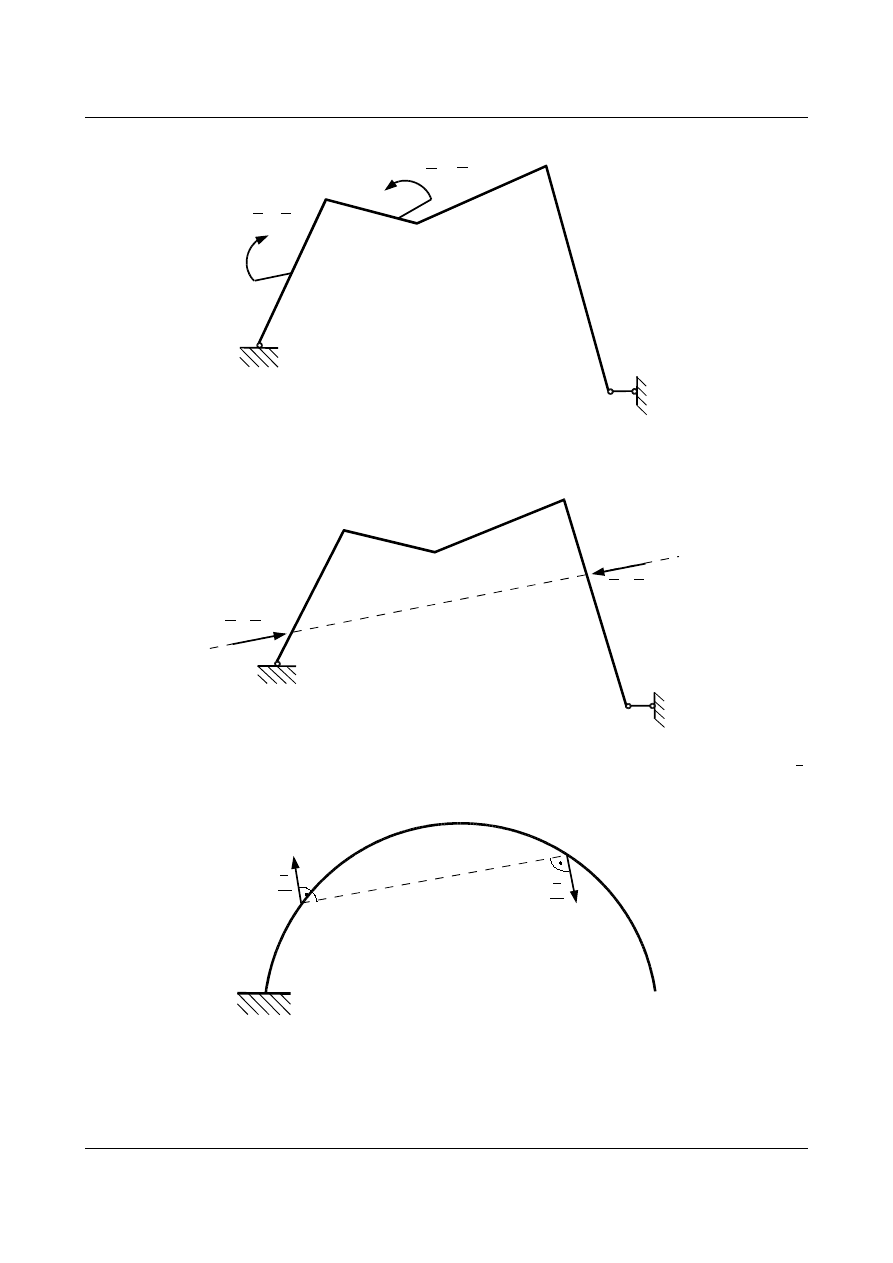
•
wzajemne zbliżenie punktów
A i B obliczamy przykładając siły o zgodnym kierunku, lecz przeciwnym
zwrocie:
B
A
P = 1
P = 1
•
aby wyliczyć kąt obrotu cięciwy
AB należy przyłożyć siły pod kątem prostym do tej cięciwy o wartości 1
przez odległość pomiędzy punktami
A i B (a):
A
B
a
1
a
1
a
•
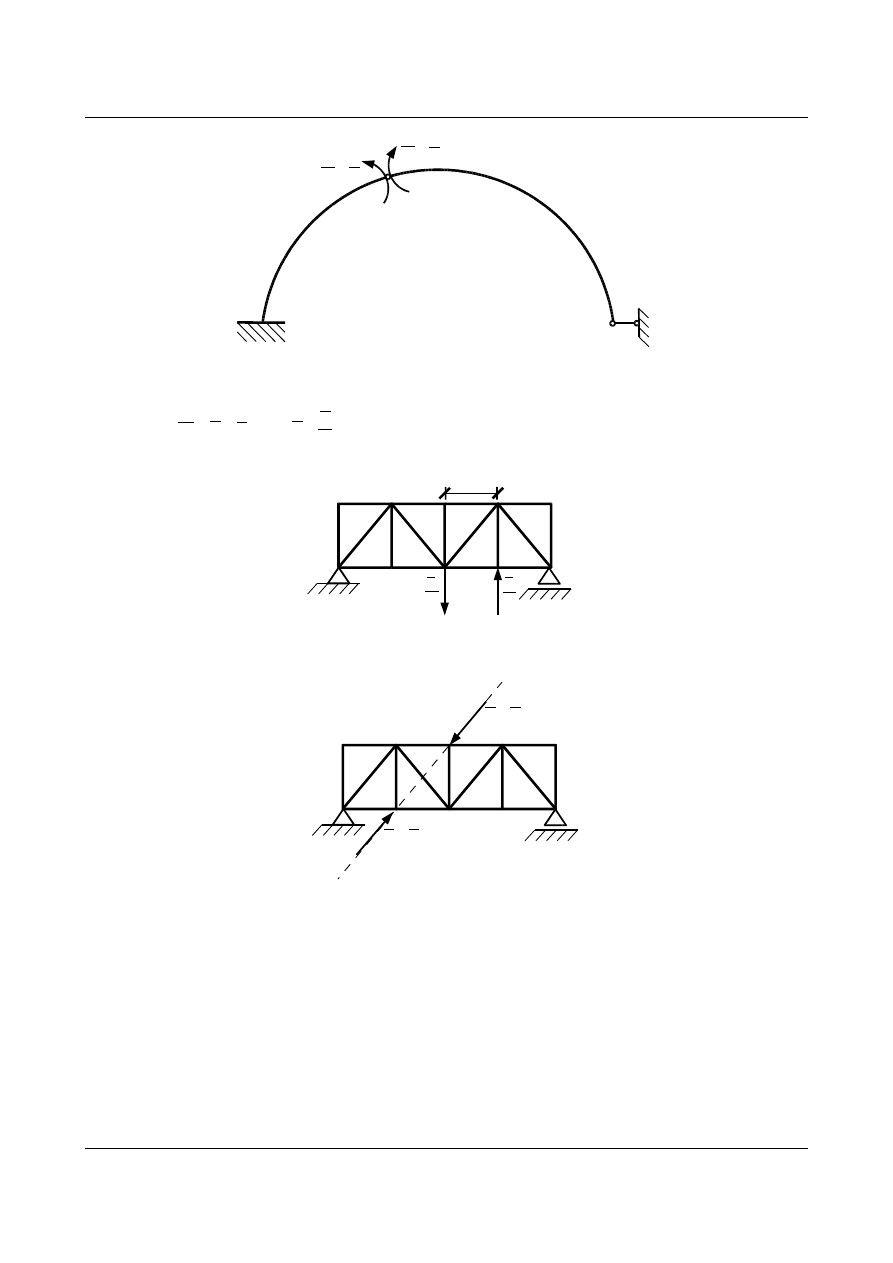
zmiana kąta zawartego między stycznymi do prętów zbiegających się w przegubie
A dają dwa momenty
jednostkowe przeciwnie zwrócone:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
3
A
M = 1
M = 1
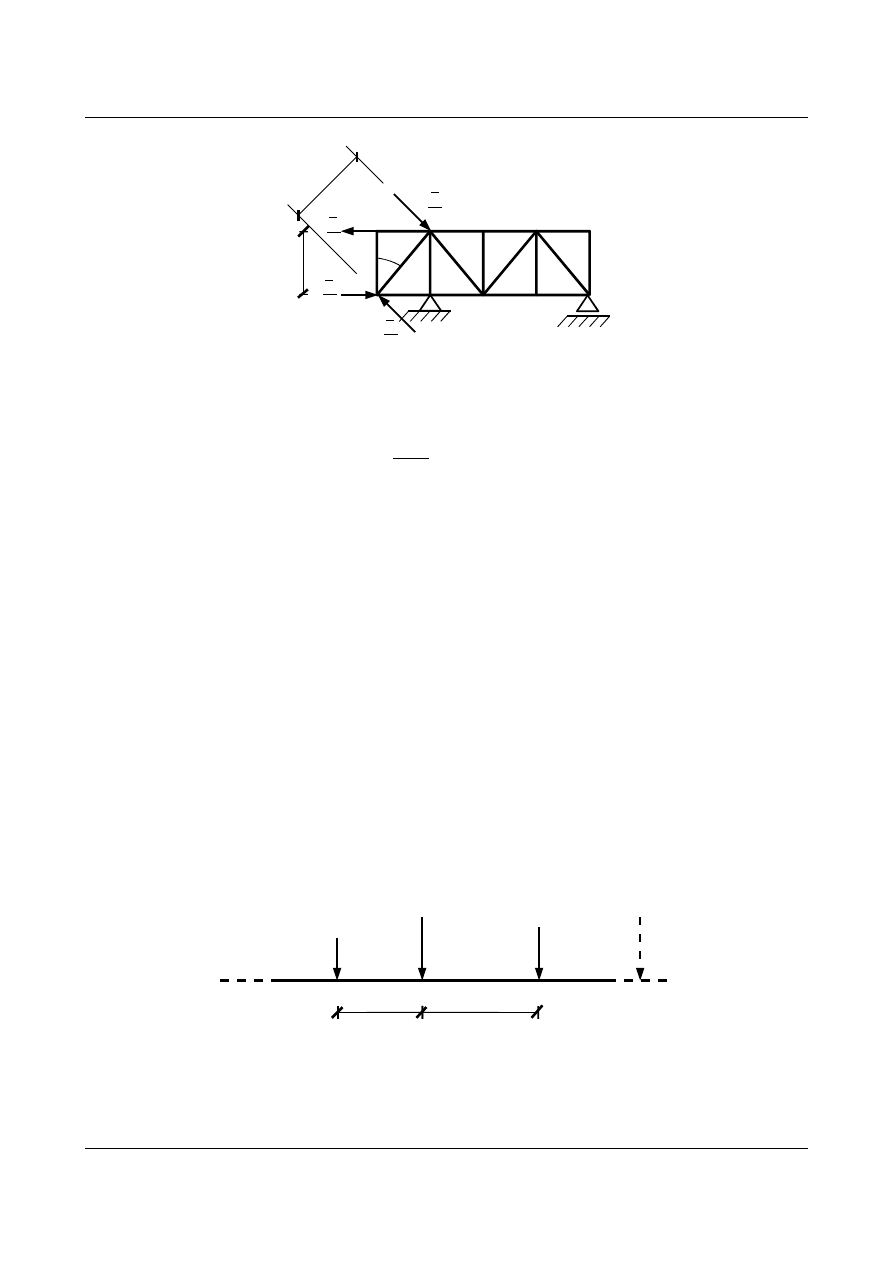
•
obrót pręta
D o długości a w kratownicy – w węzłach pręta przykładamy parę sił dającą jednostkowy
moment.
Ponieważ M
=1 =P⋅a to P=
1
a
.
a
D
1
a
1
a
•
wzajemne zbliżenie (względnie oddalenie) węzłów
A i B kratownicy dają dwie siły leżące na jednej prostej
A
B
P = 1
P = 1
•
zmiana kąta zawartego między prętami
S i K o długościach a i b – dwa jednostkowe momenty wyrażone
przez pary sił:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
4
a
b
φ
K
S
1
a
1
a
1
b
1
b
Równanie pracy wirtualnej dla kratownicy ogranicza się jedynie do działania siły normalnej (podłużnej) w
prętach:
1⋅=
∑
j
N
j
⋅
N
P
j
EA
j
t
⋅t
0
j
⋅l
j
gdzie:
N
P
(j)
- siła normalna w
j-tym pręcie wywołana obciążeniem P,
N
j
- siła normalna a
j-tym pręcie wywołana obciążeniem wirtualnym,
t
o
(j)
- temperatura działająca na pręt j,
l
j
- długość pręta
j,
(EA)
j
- sztywność pręta j.
6.2. Metoda ciężarów sprężystych
Metoda ciężarów sprężystych jest jedną z metod obliczania linii ugięcia, stosowaną najczęściej przy
wyznaczaniu składowych przemieszczeń pewnej grupy punktów układu (np. punktów osi ramy lub łuku; pasa
górnego, dolnego lub wszystkich węzłów kratownicy równocześnie).
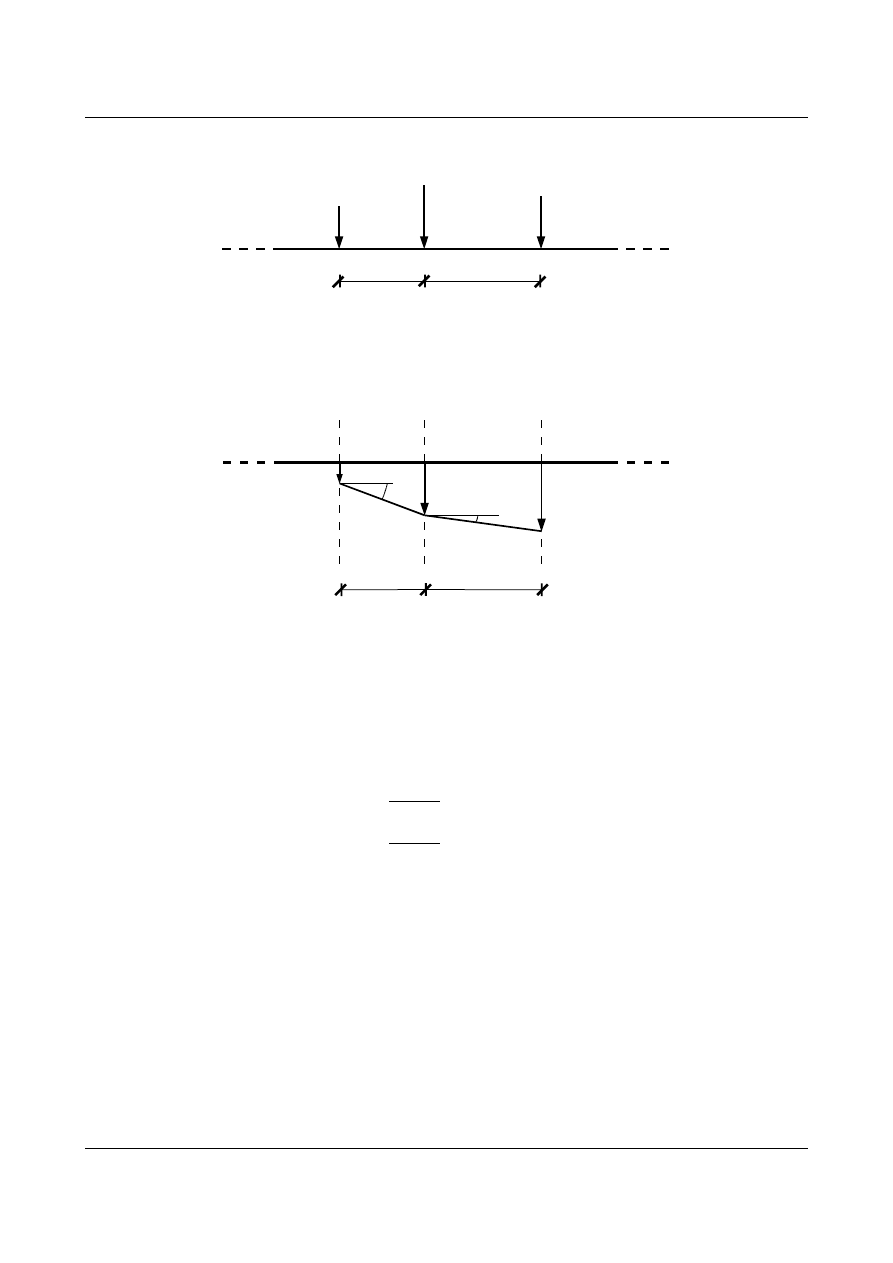
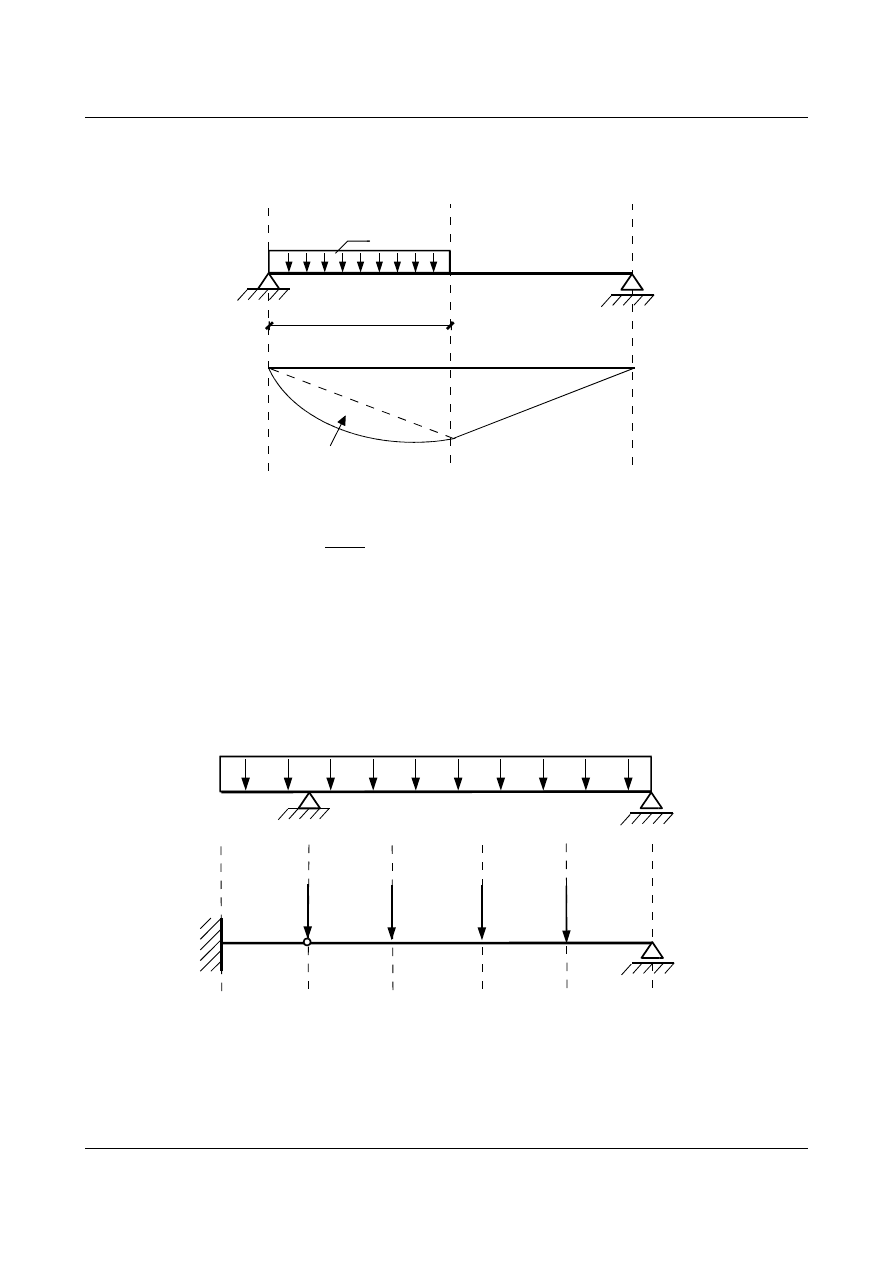
Rozpatrzmy pewien dowolny układ obciążony rzeczywistymi siłami zewnętrznymi:
i - 1
i
i + 1
P
i - 1
P
i
P
i + 1
a
i
a
i + 1
Rys. 6.1. Dowolny układ obciążony rzeczywistymi siłami zewnętrznymi
Wykresy momentów zginających i sił poprzecznych wywołanych przez siły
P
i-1
,
P
i
oraz P
i+1
, wyglądają
tak jak na rys. 6.2 i rys. 6.3:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
5
M
i - 1
M
i
M
i + 1
i - 1
i
i + 1
φ
i
φ
i + 1
M
P
a
i
a
i + 1
Rys. 6.2. Wykres momentów zginających
i + 1
i
i - 1
T
P
a
i
a
i + 1
T
i
L
T
i
P
P
i
Rys. 6.3. Wykres sił poprzecznych
Z wykresów (rys. 6.2 i rys. 6.3) wynika, że:
tan
i
=
M
i
−M
i
−1
a
i
=
dM
dx
∣
i
L
=T
i
L
(6.1)
tan
i
1
=
M
i
1
−M
i
a
i
1
=
dM
dx
∣
i
P
=T
i
P
(6.2)
Różnica wyrażeń (6.1) i (6.2) daje wartość siły obciążającej:
tan
i
1
−tan
i
=T
i
P
−T
i
L
=P
i
Ponieważ miary kątów są bardzo małe, możemy zapisać, że:
tan
≈
więc
P
i
=
i
1
−
i
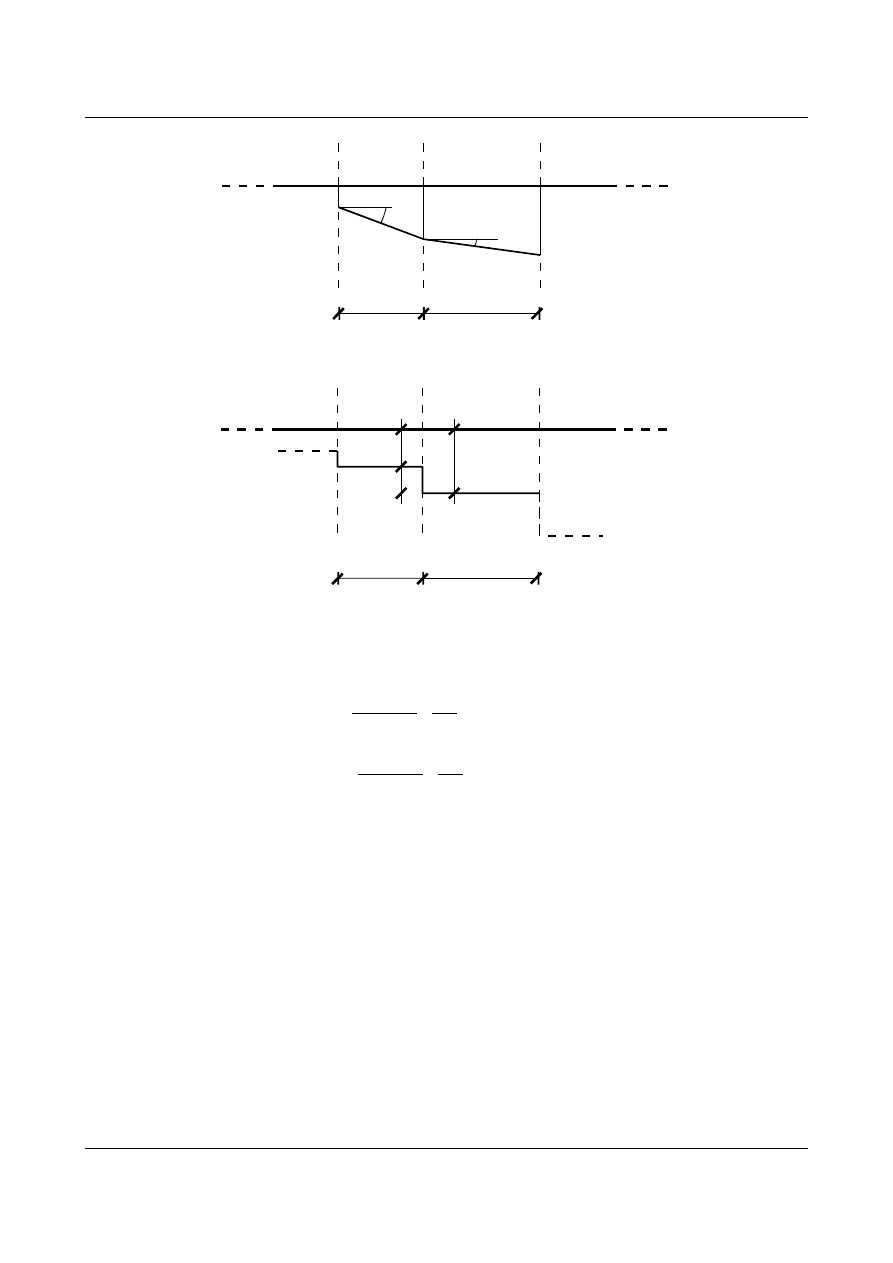
Rozpatrzmy teraz układ belkowy obciążony fikcyjnymi siłami (rys. 6.4).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
6
i - 1
i
i + 1
w
i - 1
w
i
w
i + 1
a
i
a
i + 1
Rys. 6.4. Układ belkowy obciążony fikcyjnymi siłami
Aproksymacja linii ugięcia belki linią łamaną wygląda następująco:
i - 1
i
i + 1
a
i
a
i + 1
δ
i - 1
δ
i
δ
i + 1
φ
i + 1
φ
i
Rys. 6.5. Aproksymacja linii ugięcia belki linią łamaną
Jak wynika z porównania rys.6.2 i rys. 6.5, linia ugięcia układu prętowego jest zbieżna z wykresem
momentów zginających utworzonym dla tego układu.
Podobnie jak w przypadku obciążenia rzeczywistego, różnica kątów obrotu przekrojów z lewej i prawej
strony węzła
i jest równa sile przyłożonej w węźle i :
tan
i
=
i
−
i
−1
a
i
≈
i
tan
i
1
=
i
1
−
i
a
i
1
≈
i
1
(6.3)
(6.4)
w
i
=
i
1
−
i
Dla siły
w
i
,
nazywanej dalej ciężarem sprężystym możemy zapisać definicje:
Ciężary sprężyste
•
to różnice kątów obrotu dwóch sąsiednich odcinków pręta wywołane obciążeniem w układzie
rzeczywistym,
•
to wielkości, które po obciążeniu belki zastępczej dają wykres momentów zginających identyczny z linią
ugięcia układu rzeczywistego.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
7
6.3. Ciężary sprężyste dla układów kratowych statycznie wyznaczalnych
Sposób obliczania ciężarów sprężystych dla układów kratowych statycznie wyznaczalnych przebiega
zawsze w dwóch etapach :
1. Obliczamy siłę będącą różnicą kątów nachylenia dwóch sąsiadujących odcinków prętowych i obciążamy
nią belkę zastępczą.
2. Rysujemy wykres momentów, który jest równy wykresowi linii ugięcia.
Należy przypomnieć, że w celu obliczenia wartości ciężarów sprężystych obciążamy układ siłami
wirtualnymi (SAME CIĘŻARY SPRĘŻYSTE TO NIE OBCIĄŻENIA WIRTUALNE!!!)
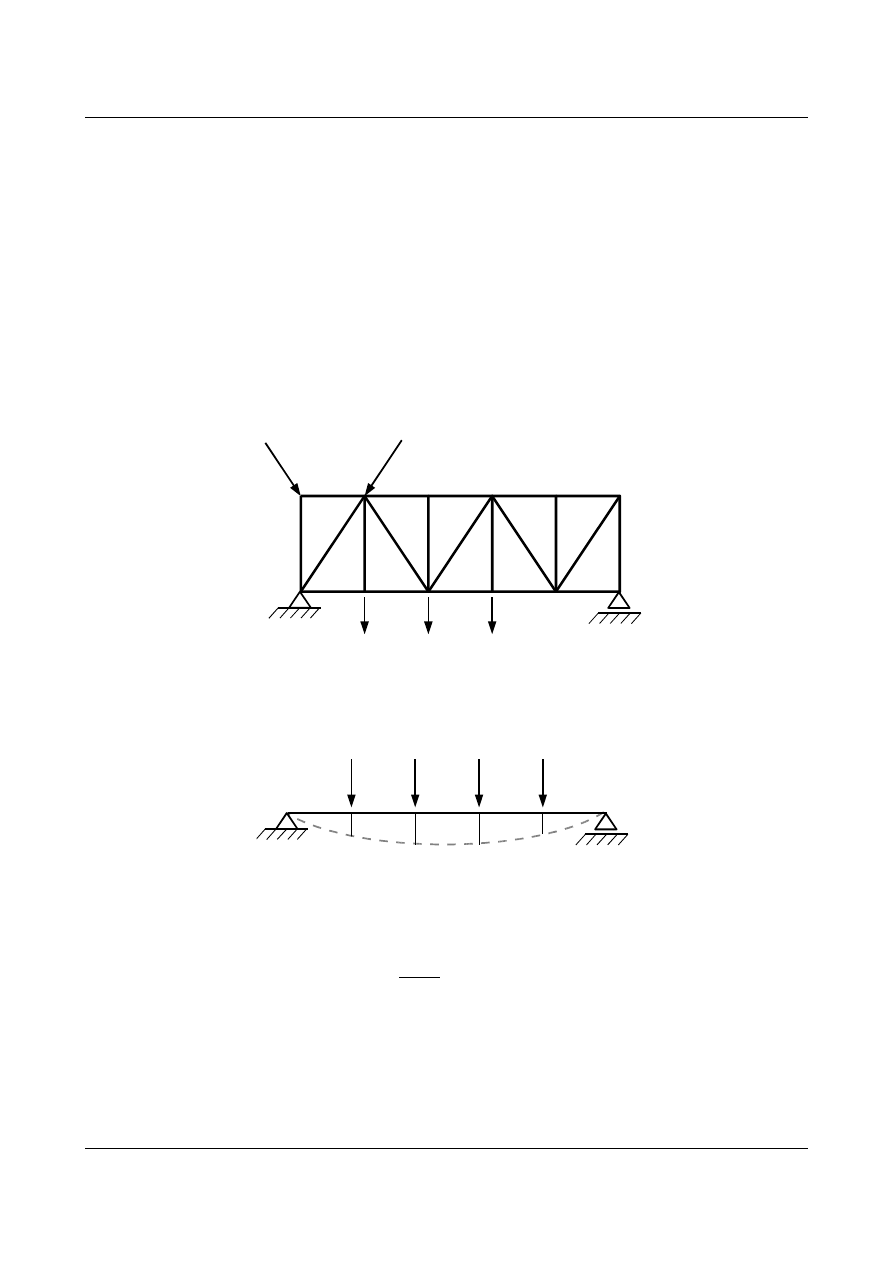
Aby wyznaczyć przemieszczenia
δ węzłów pasa dolnego kratownicy
P
2
P
1
δ
k - 1
δ
k + 1
δ
k
Rys. 6.6. Kratownica obciążona siłami P (δ – nieznane przemieszczenie)
w każdym z węzłów należy wyliczyć ciężar sprężysty w
i
i obciążyć nimi belkę zastępczą
w
k-1
w
k
w
k+1
Rys. 6.7. Belka fikcyjna (zastępcza)
ciężary sprężyste dla kratownicy możemy obliczyć ze wzoru:
w
i
=
∑
j
S
P
j
⋅S
j
EA
j
⋅l
j
(6.5)
gdzie:
S
p
(j)
oznacza siłę w
j-tym pręcie wywołaną obciążeniem zewnętrznym,
S
j
oznacza siłę w
j-tym pręcie wywołaną obciążeniem wirtualnym.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
8
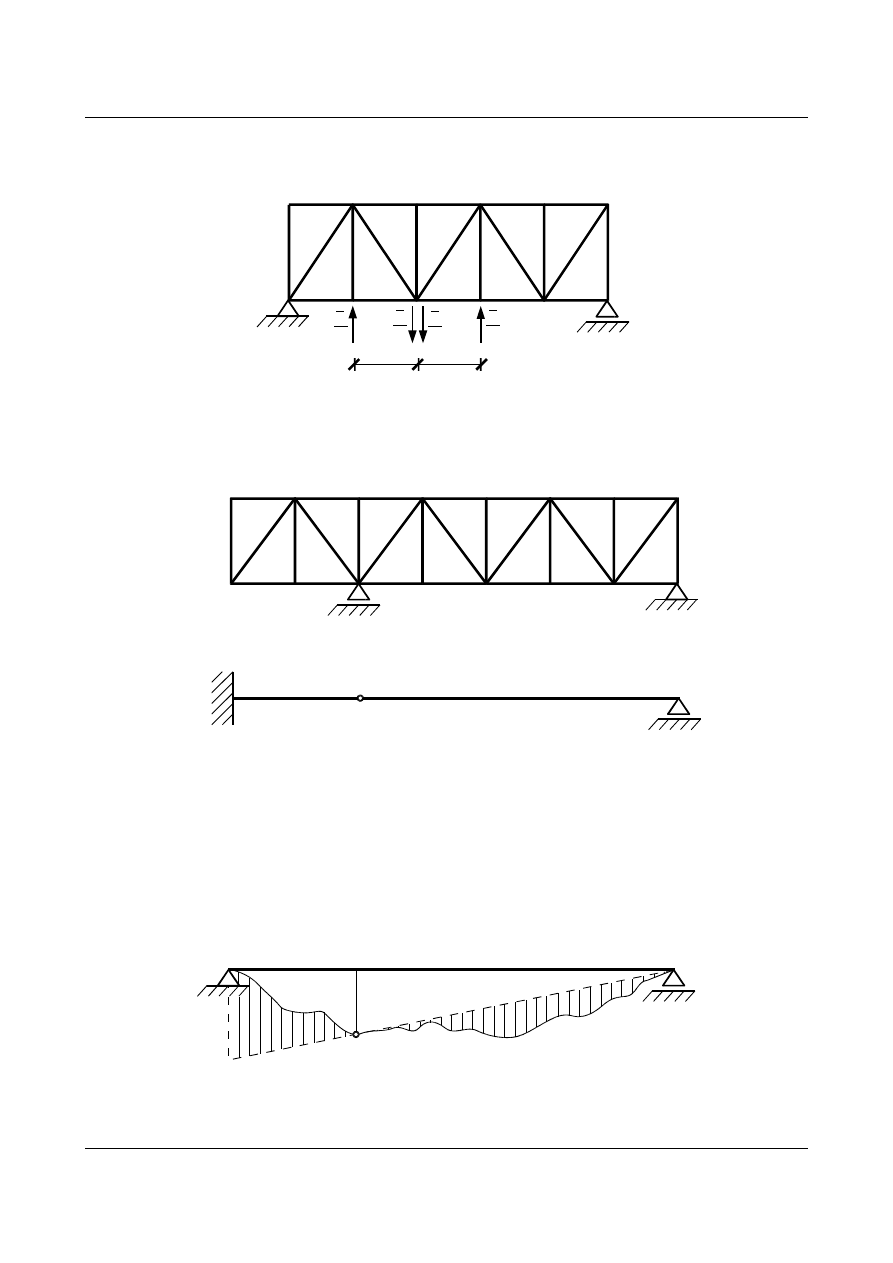
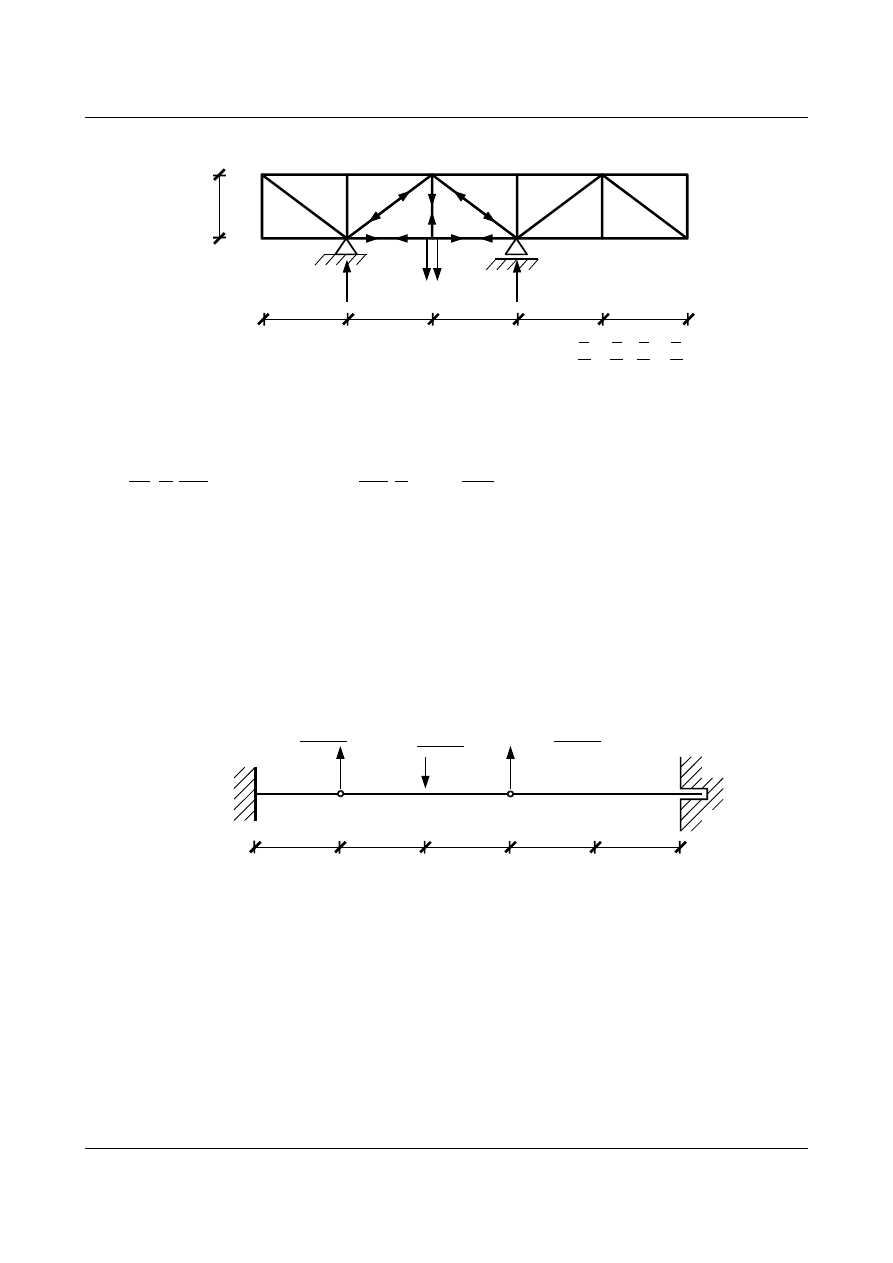
Obciążeniem wirtualnym są jednostkowe momenty, wyrażone przez pary sił, przyłożone do prętów
dochodzących do węzła, w którym liczymy ciężar sprężysty. Na przykład dla węzła
k :
k - 1
k
k + 1
a
i
a
i + 1
1
a
i+1
1
a
i
1
a
i
1
a
i+1
Rys. 6.8. Kratownica obciążona siłami wirtualnymi
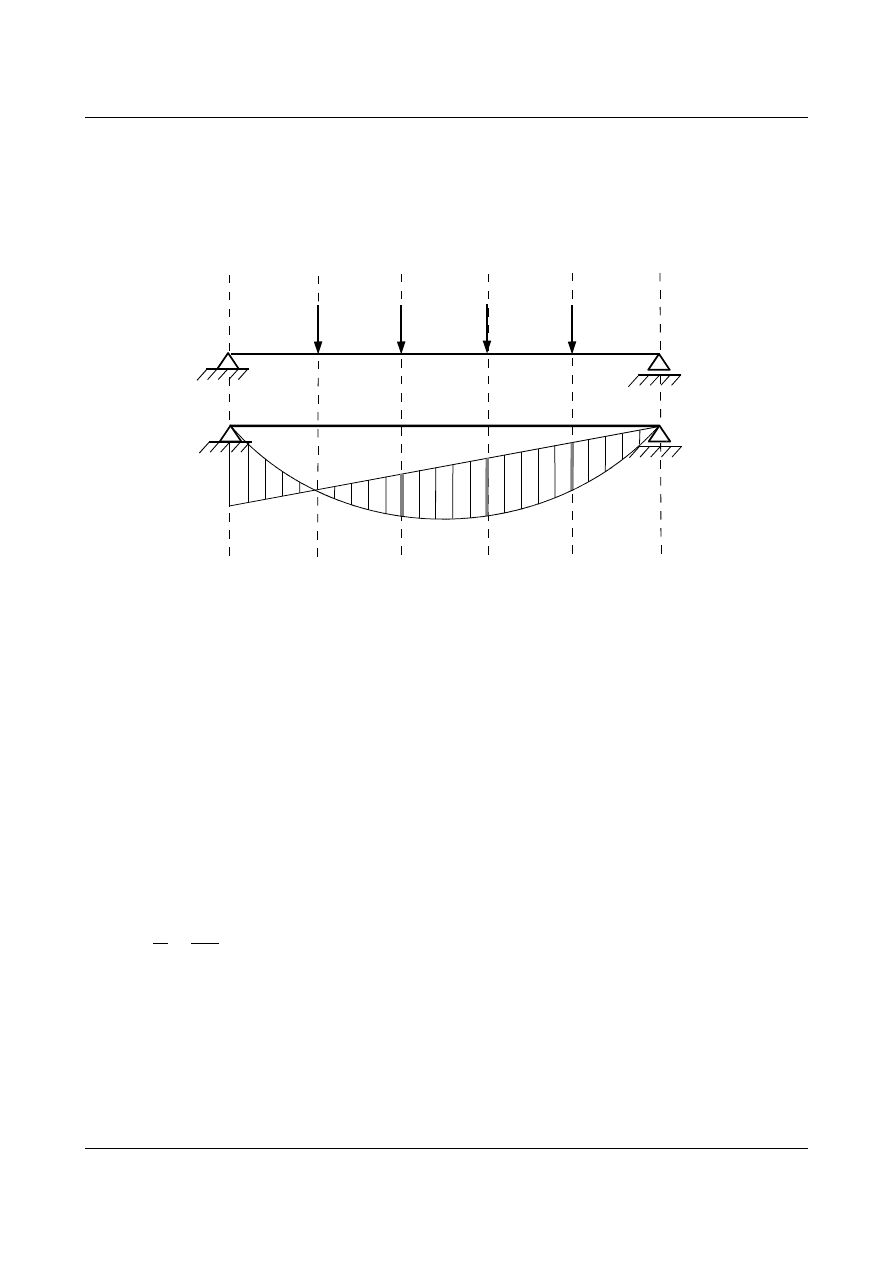
Aby przyjąć belkę zastępczą postępujemy analogiczne jak w metodzie obciążeń wtórnych kratownicę
(rys. 6.9) zamieniamy na belkę fikcyjną spełniającą warunki brzegowe układu rzeczywistego (rys. 6.10):
A
B
Rys. 6.9. Przykładowa kratownica
A
B
Rys. 6.10. Belka fikcyjna spełniająca warunki brzegowe układu rzeczywistego
Linia ugięcia pasa górnego lub dolnego kratownicy jest taka sama jak wykres momentów belki fikcyjnej.
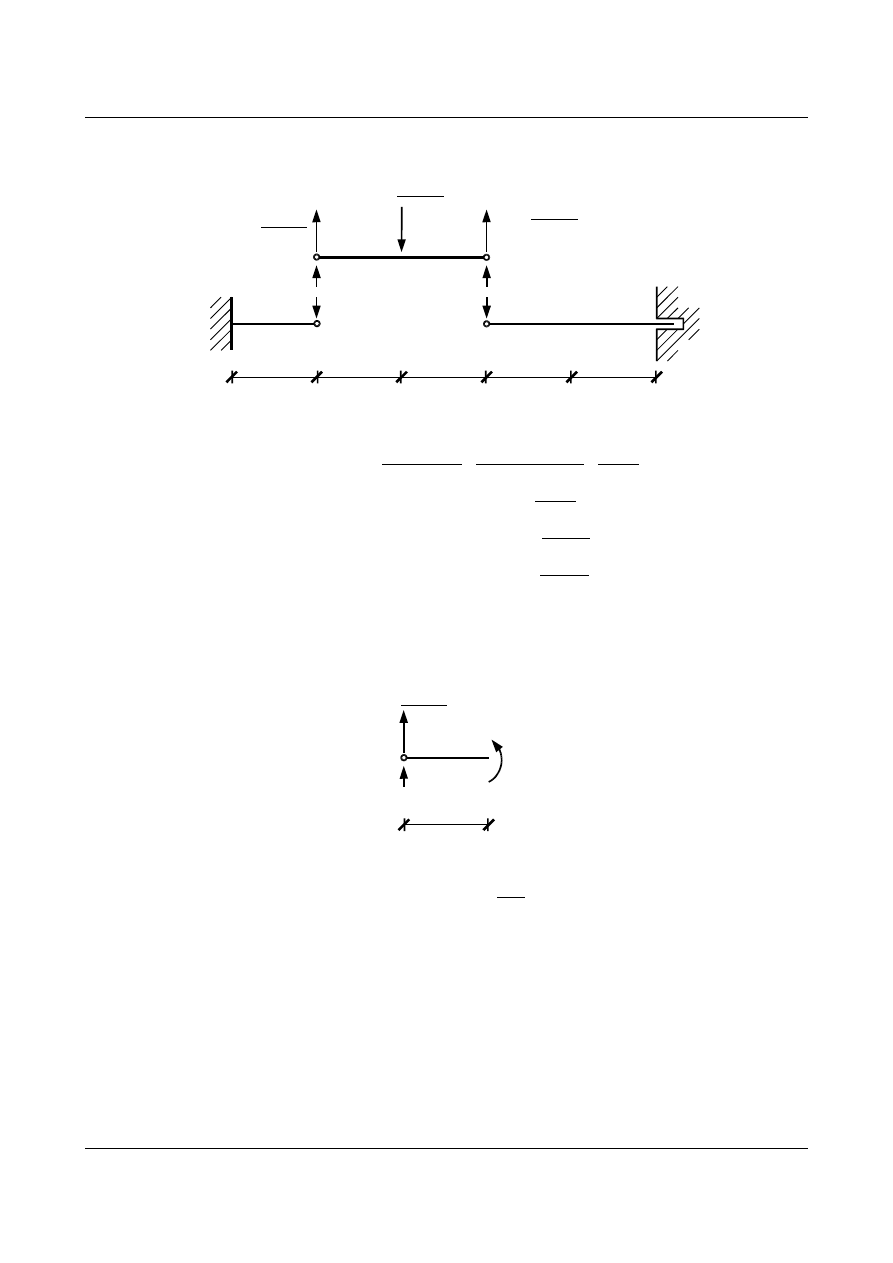
Innym sposobem tworzenia układu zastępczego jest zastosowanie belki podpartej na obu końcach. Dla
niej tworzymy wykres momentów od ciężarów sprężystych, na którym zaznaczamy rzędną punktu, gdzie
ugięcie powinno być zerowe, na rys. 6.11 są to punkty
A i B. Prowadzimy prostą zamykającą przez rzędną
wykresu w punktach
A i B. Rzędne z zakreskowanego pola między linią wykresu momentów a prostą
zamykającą, stanowią wartości ugięć kolejnych punktów układu rzeczywistego.
A
B
A'
Rys. 6.11. Schemat zastępczy dla kratownicy z rys. 6.9 - rozwiązanie drugim sposobem
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
9
Zadanie 1
Jak powinien wyglądać układ fikcyjny dla belki o podanym schemacie:
A
B
Rozwiązaniem jest belka spełniająca warunki brzegowe:
A
B
Zadanie 2
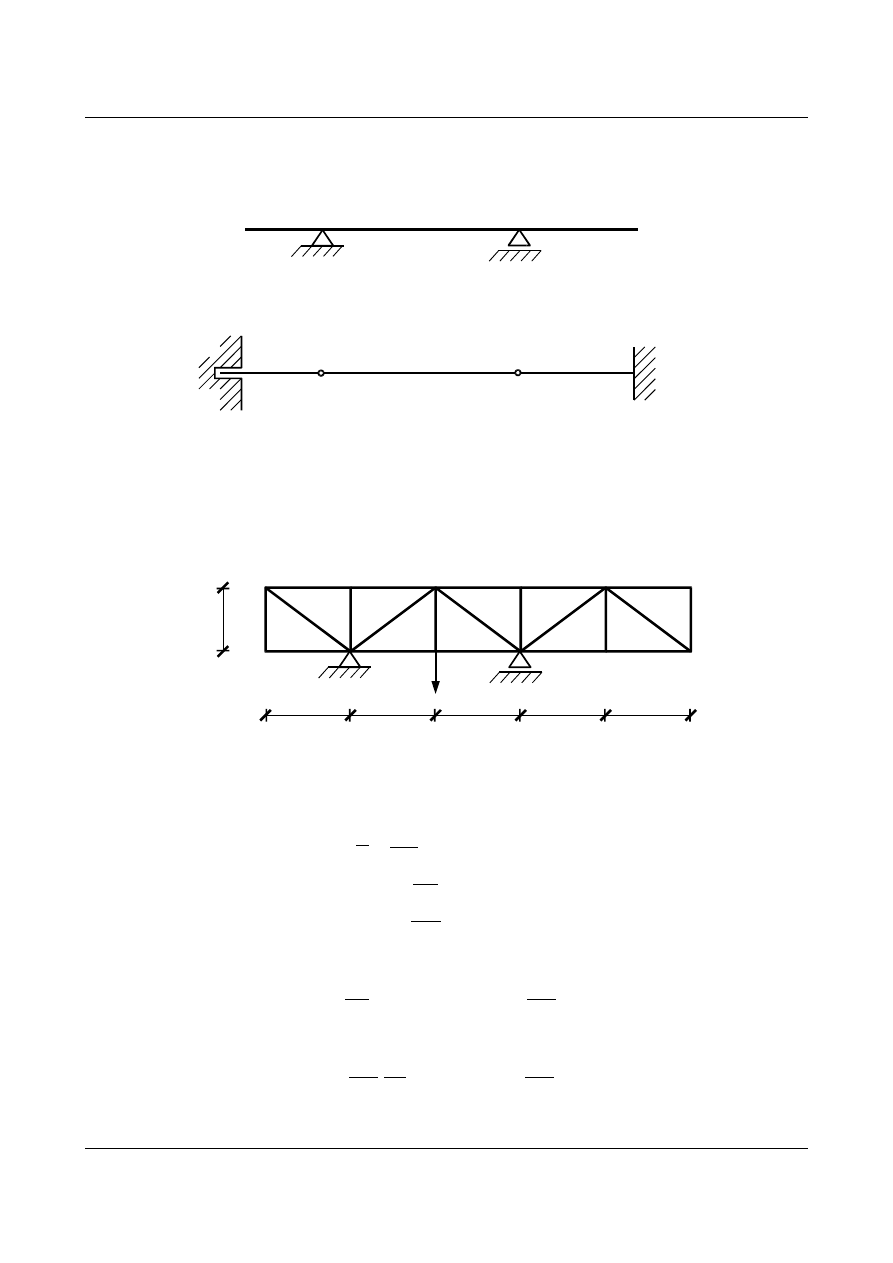
Znajdź linię ugięcia pasa dolnego kratownicy (rys. 6.12) dwoma sposobami:
a) przykładając jedynki wirtualne w kolejnych węzłach
b) stosując metodę ciężarów sprężystych
1,5
2,0
2,0
2,0
2,0
2,0
[m]
100 kN
1
2
3
4
5
6
7
8
9
10
11
12
Rys. 6.12. Zadana kratownica
ad a) Rozwiązanie kratownicy od obciążenia zewnętrznego
c
2
=1,5
2
2
2
=2,254 =6,25
c
2
=
6,25
=∣2,5 ∣
sin
=
1,5
2,5
cos
=
2
2,5
∑
Y
2
=0 :
S
2,10
⋅sin=50
S
2,10
⋅
1,5
2,5
=50
⇒
S
2,10
=
250
3
∑
X
2
=0 ⇒
S
2,3
=S
2,10
⋅cos
S
2,3
=
250
3
⋅
2
2,5
⇒
S
2,3
=
200
3
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
10
1,5
2,0
2,0
2,0
2,0
2,0
[m]
100
N
p
[kN]
50
50
100
83
,(3
)
66,(6)
66,(6)
83,(
3)
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
1
2
3
4
5
6
Rys. 6.13. Rozwiązanie kratownicy od obciążenia zewnętrznego
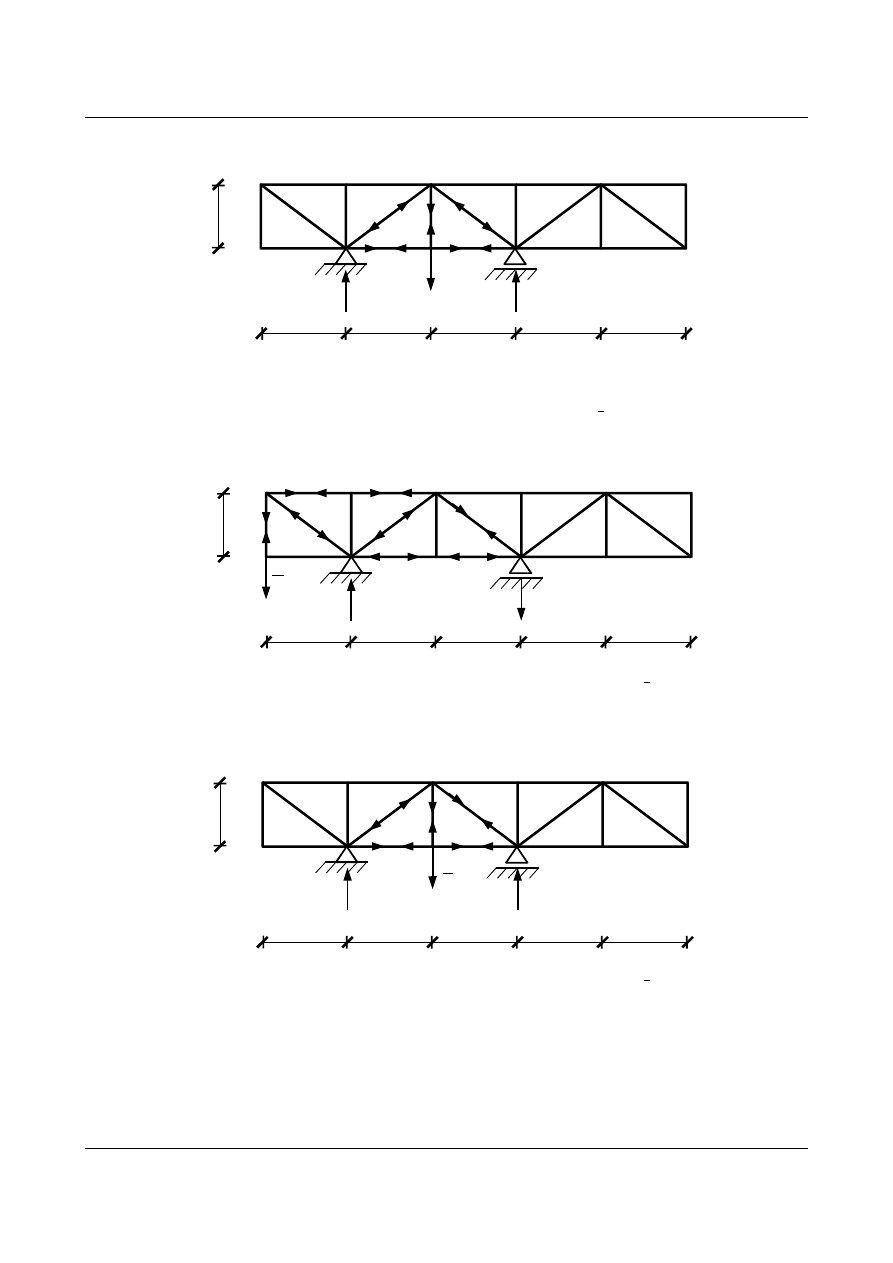
Siły w prętach kratownicy obciążanej w kolejnych węzłach siłą wirtualną P
=1
1,5
2,0
2,0
2,0
2,0
2,0
[m]
1,5
0,5
1
0,(6)
0,(6)
1,(3)
1,(3)
0,8
(3)
1,(6
)
0,8
(3)
O
O
O
O
O
O
O
O
O
O
O
O
O
N
1
[ - ]
1
1
2
3
4
5
6
Rys. 6.14. Kratownica obciążana w węźle nr 1 siłą wirtualną P
=1
1,5
2,0
2,0
2,0
2,0
2,0
[m]
0,5
0,5
0,(6)
0,(6)
1
0,8
(3)
0,8(
3)
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
O
N
3
[ - ]
1
1
2
3
4
5
6
Rys. 6.15. Kratownica obciążana w węźle nr 3 siłą wirtualną P
=1
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
11
1,5
2,0
2,0
2,0
2,0
2,0
[m]
N
6
[ - ]
1
2
O
O
O
O
O
O
O
O
O
O
O
1,(
6)
1,(
6)
1,(6
)
1,(6
)
2,(6)
2,(6)
1,(3)
1,(3)
1,(3)
1,(3)
1
1
2
3
4
5
6
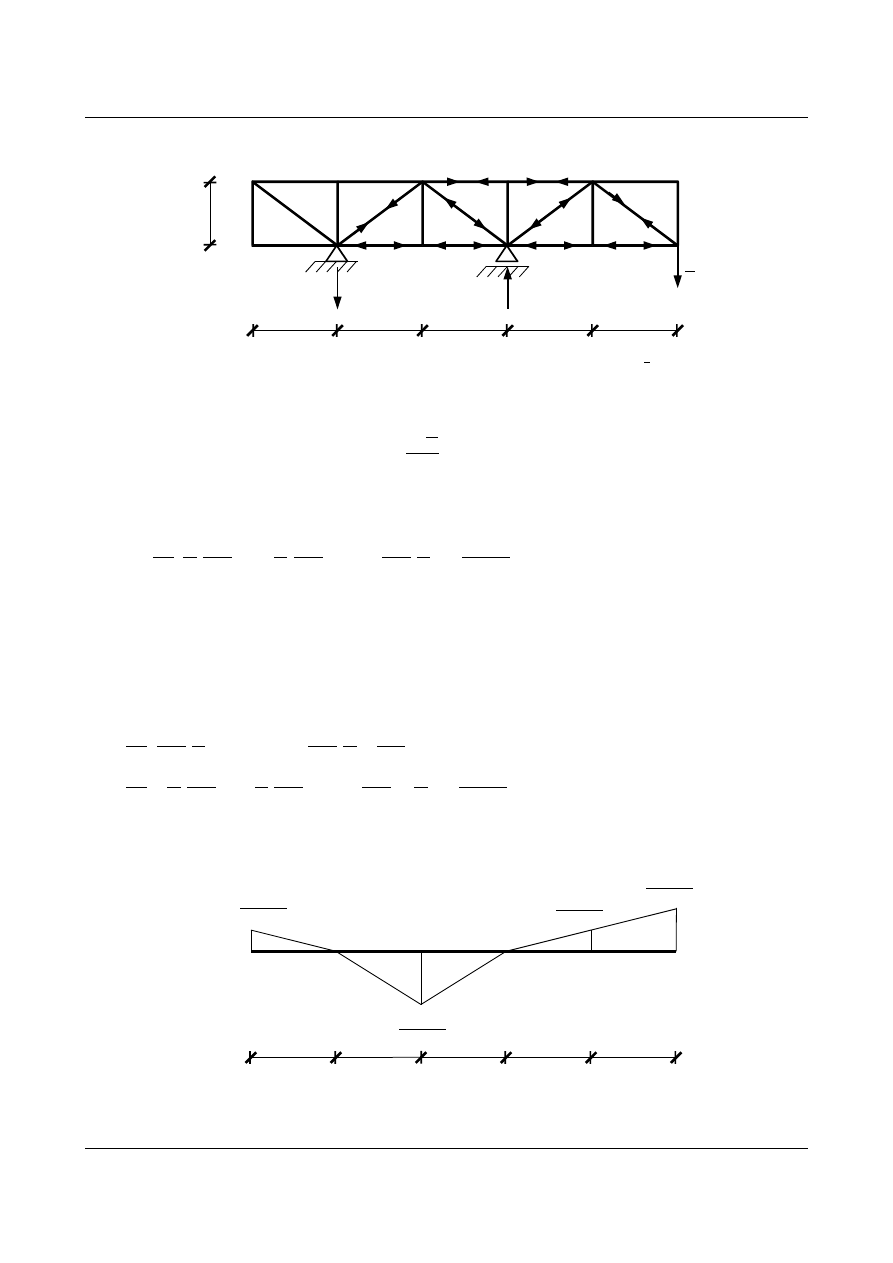
Rys. 6.16. Kratownica obciążana w węźle nr 6 siłą wirtualną P
=1
Obliczenia przemieszczeń wykonywać będziemy na podstawie wzoru :
v
i
=
∑
N
⋅N
EA
l
Z symetrii układu wynika, że
v
1
i
v
5
są sobie równe:
v
1
=v
5
=
1
EA
5
6
⋅
250
3
⋅2,5 −
5
6
⋅
250
3
⋅2,5 −2 ⋅
200
3
⋅
2
3
=−
177,
7
EA
Ugięcia w podporach są zerowe:
v
2
=v
4
=0
Przemieszczenia węzła 3 i 6 wynoszą:
v
3
=
1
EA
250
3
⋅
5
6
⋅2 100 ⋅1 2 ⋅
200
3
⋅
2
3
=
675
EA
v
6
=
1
EA
−
5
3
⋅
250
3
⋅2,5
5
3
⋅
250
3
⋅2,5 −2 ⋅
200
3
⋅2 ⋅
4
3
=−
355,
5
EA
Rozwiązanie przedstawiono na rys. 6.17:
2,0
2,0
2,0
2,0
2,0
[m]
177,(7)
EA
177,(7)
EA
355,(5)
EA
675,0
EA
Rys. 6.17. Linia ugięcia pasa dolnego kratownicy
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
12
Odcinki linii ugięcia pasa dolnego kratownicy pomiędzy wyznaczonymi w węzłach wartościami
aproksymowano liniami prostymi.
ad b) Metoda ciężarów sprężystych
W celu obliczenia ciężarów sprężystych układ obciążamy grupami sił
1
a
k
,
1
a
k
1
a
k
1
,
1
a
k
1
, które
przykładamy w sąsiadujących węzłach
k -1, k, k + 1.
W naszym przykładzie
a
k
=
a
k+1
= 2,0 m.
Ciężary sprężyste wyznaczamy na podstawie wzoru:
w
i
=
∑
j
S
P
j
⋅S
j
EA
j
⋅l
j
(6.6)
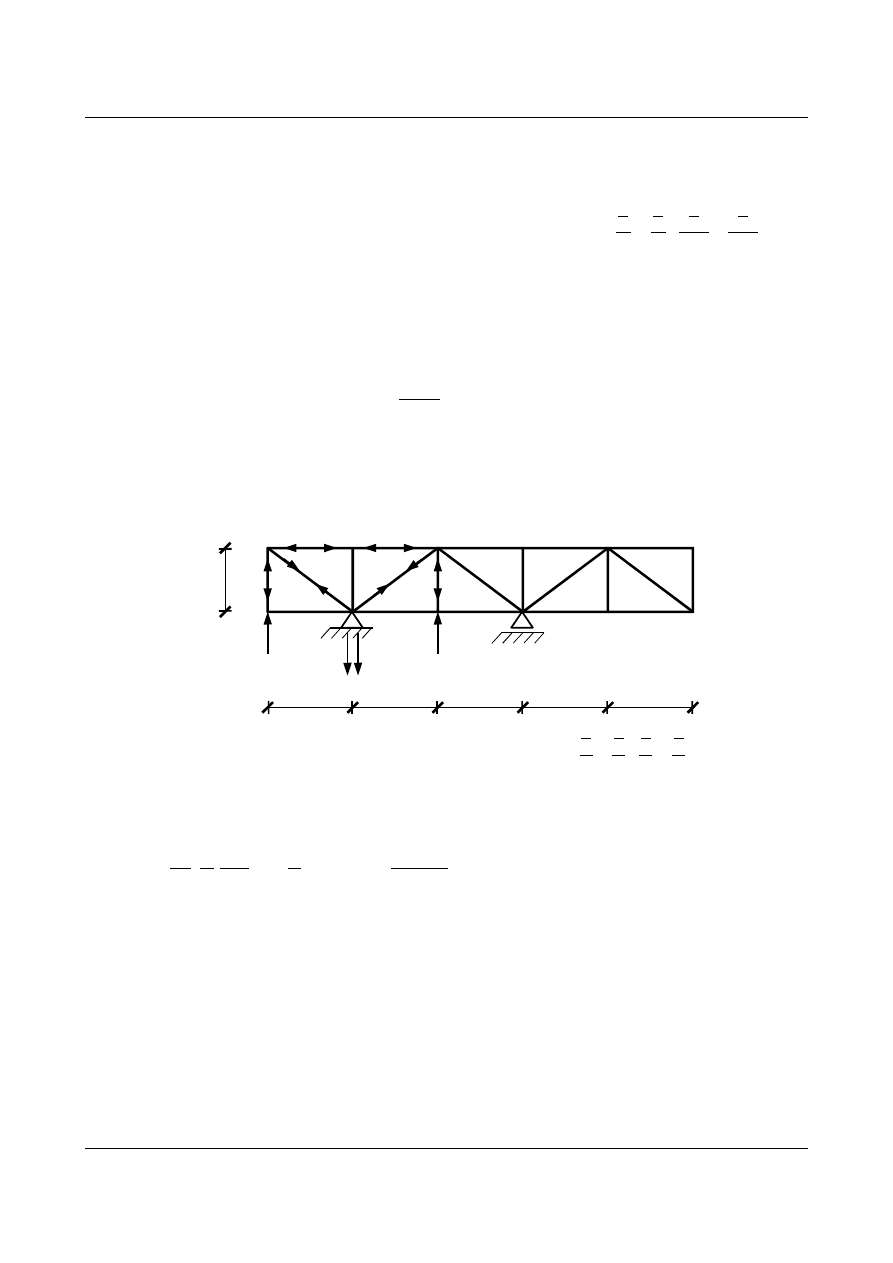
Aby określić wartość ciężaru sprężystego w
2
wyznaczamy siły w prętach kraty (rys. 6.18) obciążonej w
węzłach 1, 2, 3.
Rys. 6.18. Kratownica obciążanej w węzłach nr 1,2,3 siłami 1
2
,
1
2
1
2
,
1
2
Obliczamy wartość ciężaru sprężystego dla węzła 2 (z symetrii układu wynika, że
w
2
=
w
4
):
w
2
=w
4
=−
1
EA
5
6
⋅
250
3
⋅2,5
1
2
⋅100 ⋅1,5
=−
248,6
1
EA
Dla ciężaru sprężystego w
3
poszukujemy sił w prętach kraty od obciążenia w węzłach 2, 3, i 4.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
1,5
2,0
2,0
2,0
2,0
2,0
[m]
0,5
0,5
0,5
0,5
O
O
O
O
O
O
O
O
O
O
O
O
0,5
O
0,5
0,8
(3)
0,8
(3)
O
O
0,(6)
0,(6)
N
W2
[ - ]
1
2
3
4
5
6
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
13
Rys.6.19. Kratownica obciążanej w węzłach nr 2,3,4 siłami 1
2
,
1
2
1
2
,
1
2
obliczamy wartość ciężaru sprężystego:
w
3
=
1
EA
5
6
⋅
250
3
⋅2,5⋅21 ⋅100 ⋅1,5 ⋅1
200
3
⋅
2
3
⋅2 ⋅2
=
675
EA
Dla ciężaru
w
5
obciążenie wirtualne przykładamy w węzłach 4, 5 i 6. Wyznaczone w ten sposób siły
występują tylko w prętach, w których siły od obciążenia są równe zero. Wobec tego:
w
5
=0
Dobieramy układ zastępczy dla kratownicy (rys. 6.12) i obciążmy ciężarami sprężystymi:
2,0
2,0
2,0
2,0
2,0
[m]
A
B
C
D
w
2
=
248,6(1)
EA
w
3
=
675,0
EA
w
4
=
248,6(1)
EA
Rys. 6.20. Układ zastępczy dla kratownicy
Z rys. 6.20 widać, że ciężary
w
1
i
w
6
byłyby przyłożone w podporach. Tak więc nie mają wpływu na
ugięcia.
Obliczamy reakcje podporowe:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
1,5
2,0
2,0
2,0
2,0
2,0
[m]
0,5
0,5
0,5
0,5
N
W3
[ - ]
O
O
O
O
O
O
O
O
O
O
0,8
(3)
0,8
(3)
O
O
O
O
O
1
0,(6)
0,(6)
1
2
3
4
5
6
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
14
2,0
[m]
A
B
2,0
2,0
2,0
C
D
2,0
belka I
belka II
belka III
R
B
R
C
w
2
=
248,6(1)
EA
w
4
=
248,6(1)
EA
w
3
=
675,0
EA
dla belki II
∑
M
C
=0 ⇒ R
B
=
w
3
⋅2 −w
2
⋅4
4
=
675
⋅2−248,6 1
EA
=
88,
8
EA
R
A
=R
B
=R
C
=R
D
=
88,
8
EA
dla belki I
∑
M
A
=0 ⇒
M
A
=R
B
⋅2 =
177,
7
EA
dla belki II
∑
M
D
=0 ⇒
M
D
=R
C
⋅4 =
355,
5
EA
Obliczamy moment w środku rozpiętości części II :
R
B
2,0
E
M
E
w
2
=
248,6(1)
EA
∑
M
E
=0 ⇒ M
E
=R
B
w
2
⋅2=
675
EA
Wykres momentów od ciężarów sprężystych przedstawia również linię ugięcia pasa dolnego kratownicy:
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
15
2,0
2,0
2,0
2,0
2,0
[m]
177,(7)
EA
177,(7)
EA
355,(5)
EA
675,0
EA
Rys. 6.21. Wykres momentów od ciężarów sprężystych
6.4. Obliczanie ciężarów sprężystych dla układów prętowych zginanych
Rozważymy dowolny zginany układ prętowy obciążony siłami skupionymi
P
k
. Każdy z prętów układu
posiada przekrój o polu powierzchni
A
k
i momencie bezwładności
I
k
, długość pręta oznaczono
l
k
.
W celu wyznaczenia przemieszczeń
φ
k
wzdłuż kierunków działających sił P
k
należy wyznaczyć dla
każdego węzła ciężar sprężysty
w
k
.
Ciężar sprężysty jest liczony na podstawie wykresów sił wewnętrznych od obciążenia rzeczywistego i
od obciążenia wirtualnego, które stanowią pary sił (momenty jednostkowe).
k-1
k
k+1
P
k-1
P
k
P
k+1
l
k
l
k+1
a
k
a
k+1
A
k ,
J
k
A
k +1,
J
k+1
ß
k
ß
k+1
M
k-1
M
k
M
k+1
M
p
N
p
N
k
N
k
N
k+1
Rys. 6.22. Układ prętowy obciążony siłami skupionymi
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
16
+
M
1
1
tg β
k+1
a
k
a
k+1
1
N
a
k
1
a
k
1
a
k+1
1
a
k+1
l
k+1
1
tg β
k+1
l
k+1
1
tg β
k
l
k
-1
tg β
k
l
k
-1
Rys. 6.23. Układ prętowy obciążony w więzach siłami wirtualnymi
We wzorze określającym ciężar sprężysty nie uwzględniamy sił tnących i osiadań:
w
k
=
∑
{
∫
s
M
M
p
EJ
t
t
h
ds
∫
s
N
N
p
EA
t
t
0
ds
}
(6.7)
Używając oznaczeń z wykresów sił wewnętrznych można zapisać:
w
k
=
1
E J
k
[
1
2
1 l
k
1
3
M
k
−1
2
3
M
k
]
1
E J
k
1
[
1
2
1l
k
1
1
3
M
k
1
2
3
M
k
]
1
E A
k
[
−
1
l
k
tg
k
l
k
N
k
]
1
E A
k
1
[
1
l
k
1
tg
k
1
l
k
1
N
k
1
]
t
t
h
k
1
2
1 l
k
t
t
h
k
1
1
2
1l
k
1
t
t
0
−
1
l
k
tg
k
l
k
t
t
0
1
l
k
1
tg
k
1
l
k
1
(6.8)
Po skróceniu otrzymujemy ogólny wzór na ciężar sprężysty z uwzględnieniem momentów zginających,
sił normalnych i temperatury.
w
k
=
l
k
6 E J
k
2 M
k
M
k
−1
l
k
1
6 E J
k
1
2 M
k
M
k
1
−1tg
k
6 E A
k
N
k
tg
k
1
6 E A
k
1
N
k
1
t
t
2
l
k
h
k
l
k
1
h
k
1
t
t
0
−tg
k
tg
k
1
(6.9)
t , t
- wspólne dla obu prętów (
l
k
i
l
k + 1
).
Należy zwrócić uwagę na pewne przypadki szczególne stosowania wzoru (6.8)
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
17
1. Dla wykresów krzywoliniowych do powyższego wzoru należy dodać poprawkę uwzględniającą parabolę
tzn. zwiększyć wartość
w
k
o część wynikającą z faktu krzywoliniowego wykresu momentów rzeczywistych.
Δw
l
k
A
k
,J
k
q
Rys. 6.24. Krzywoliniowy wykres momentów
w
k
=
1
6 E J
k
[
2 M
k
M
k
−1
]
... w
(6.10)
2. W przypadku nieciągłości wykresu, skoku o wartość momentu rzeczywistego, rozbijamy wykres na dwa
wykresy, ale całość koncepcji nie zostaje zmieniona.
Po obliczeniu ciężarów sprężystych obciążamy nimi belkę fikcyjną, tzn. taką, która spełnia warunki
brzegowe układu rzeczywistego (analogia do metody obciążeń wtórnych).
C
A
B
w
1
w
2
w
3
w
4
Rys. 6.25. Belka zastępcza (fikcyjna) obciążona ciężarami sprężystymi
Można jednak zamiast belki fikcyjnej obciążać ciężarami sprężystymi belkę spoczywającą na dwóch
podporach, wymaga to jednak pewnego zabiegu graficznego.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
18
Dla belki podpartej na dwóch końcach wykres momentów powstały od obciążeń
w
k
będzie równy zeru w
punktach
A i C (rys. 6.26) (ugięcie tych punktów równe jest zeru). Jednak warunkiem brzegowym belki
rzeczywistej jest zerowe ugięcie w punktach
B i C. Należy postąpić w następujący sposób: po narysowaniu
wykresu momentów w belce podpartej na obu końcach, kreślimy prostą zamykającą tak aby przecięła rzędne
wykresu momentów dla punktów
B i C.
A
B
C
w
1
w
2
w
3
w
4
δ
3
δ
4
δ
2
B
A
C
Rys. 6.26. Belka wolnopodparta na obu końcach obciążona ciężarami sprężystymi
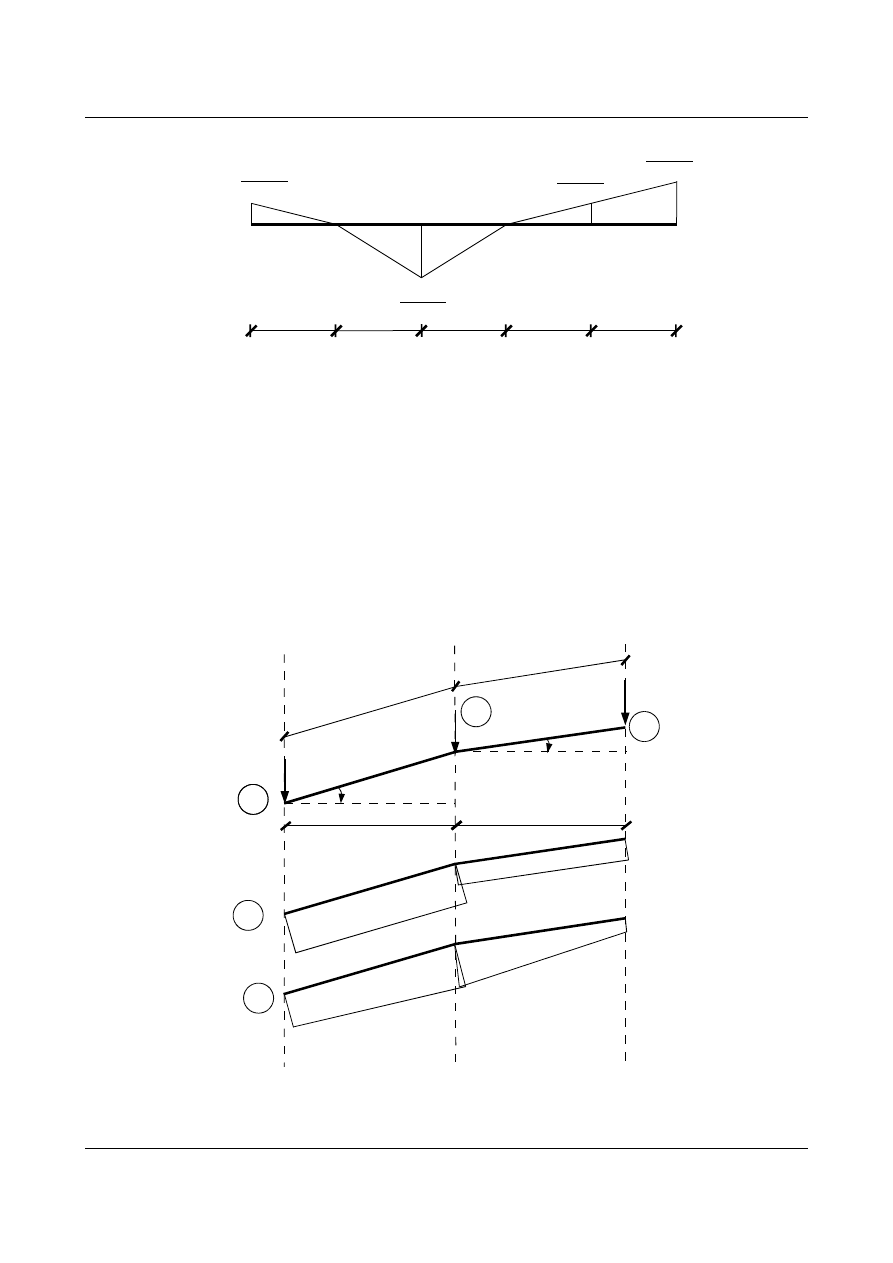
Rzędne zakreskowanego pola (rys. 6.26) pomiędzy linią krzywą a prostą zamykającą stanowią wartości
ugięć kolejnych punktów belki rzeczywistej (na rysunku wyróżniono ugięcia w punktach przyłożenia ciężarów
sprężystych).
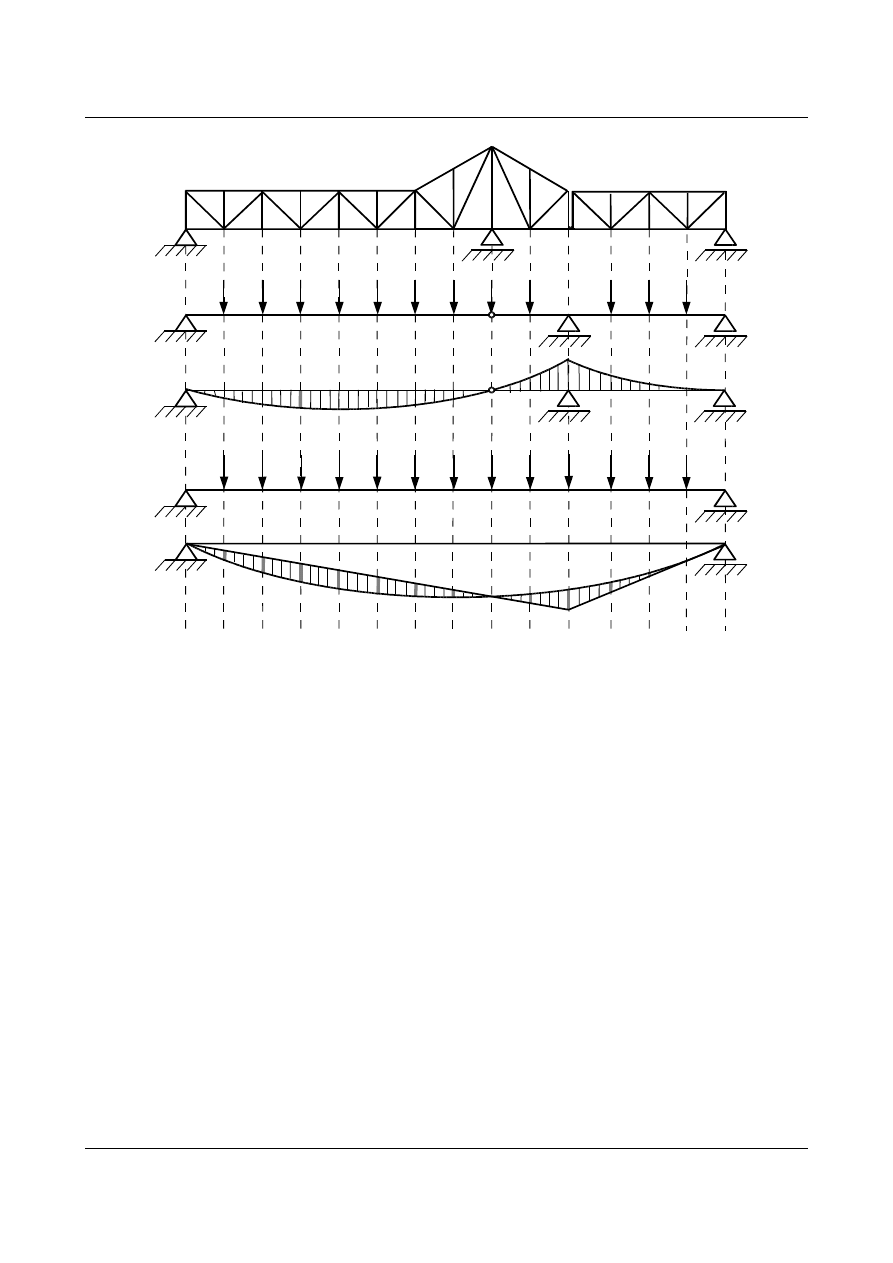
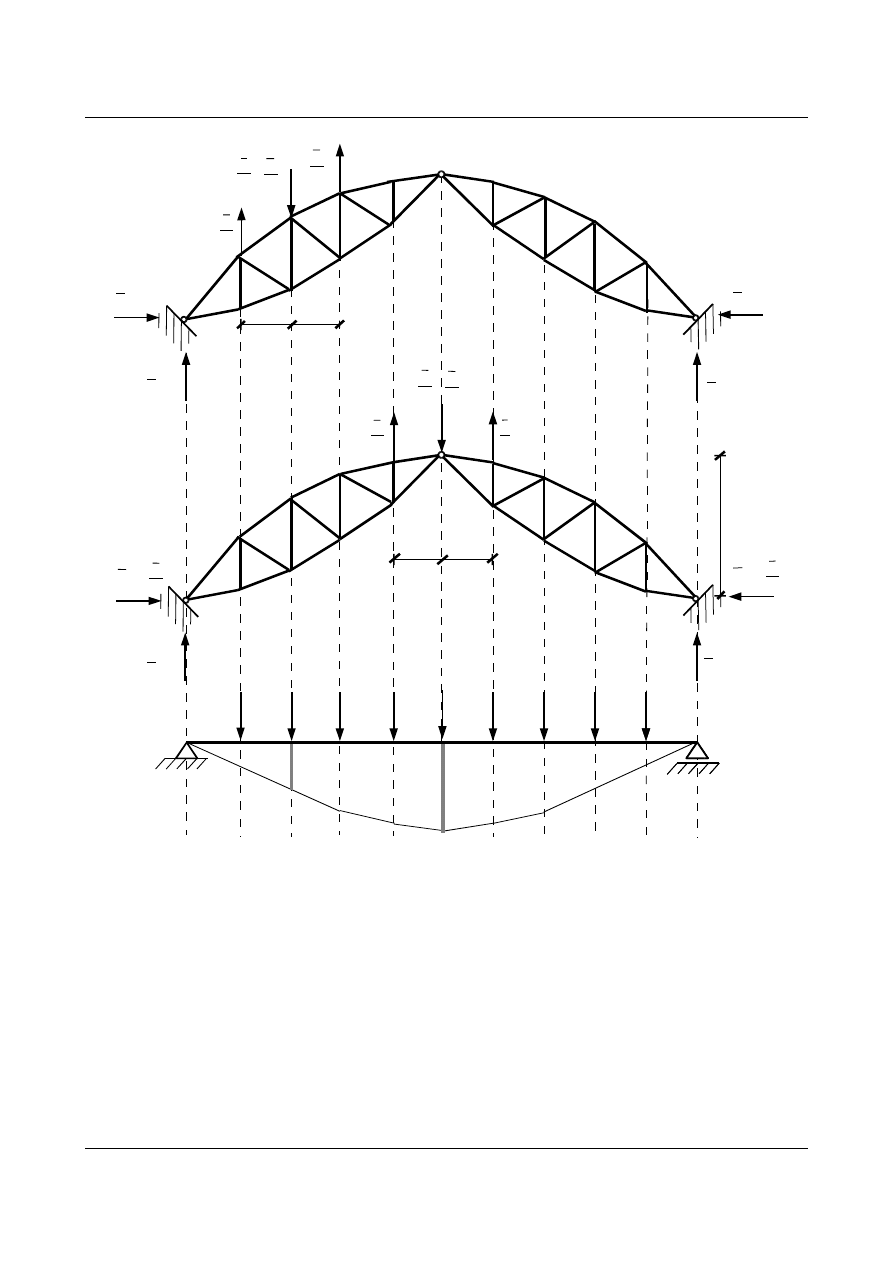
Analogicznie postępujemy w przypadku kratownic wyznaczając linię ugięcia mamy dwie możliwości:
Możemy przyjąć schemat belki zastępczej spełniającej warunki brzegowe układu rzeczywistego. W punkcie
B
(rys. 6.27a) jest podpora (przemieszczenie jest zerowe) wprowadzamy przegub aby moment od ciężarów
sprężystych był równy zero.
Drugim sposobem jest zastosowanie schematu belki wolnopodpartej (rys. 6.27c) dla której tworzymy
wykres momentów od sił
w
k
. Kreślimy prostą zamykającą przez rzędne w punktach
A i B (zerowe
przemieszczenia w kracie rzeczywistej) aż do punktu
M. Dalej łączymy prostą zamykającą punkty M i C.
Przemieszczenia to wartości pomiędzy wykresem krzywoliniowym i prostymi zamykającymi. Przypomnieć
należy, że w kratownicy możemy wyznaczyć linię ugięcia pasa dolnego lub pasa górnego w zależności od
sposobu wyznaczenia samych ciężarów sprężystych. W przypadku pasa górnego trzeba wirtualne obciążenia
(pary sił
1
a
k
i
1
a
k
1
) przykładać do węzłów górnych.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
19
A
1
2
3
4
5
6
7
8
9
M
10
11
12
C
B
a)
b)
c)
w
1
w
2
w
3
w
4
w
5
w
6
w
7
w
9
w
10
w
11
w
12
w
8
δ
3
δ
3
w
1
w
2
w
3
w
4
w
5
w
6
w
7
w
9
w
10
w
11
w
12
w
8
w
M
Rys. 6.27. a) układ rzeczywisty, b) układ zastępczy (analogia do metody obciążeń wtórnych) - belka fikcyjna,
c) układ zastępczy (belka wolno podparta - konieczność wprowadzenia zabiegu graficznego)
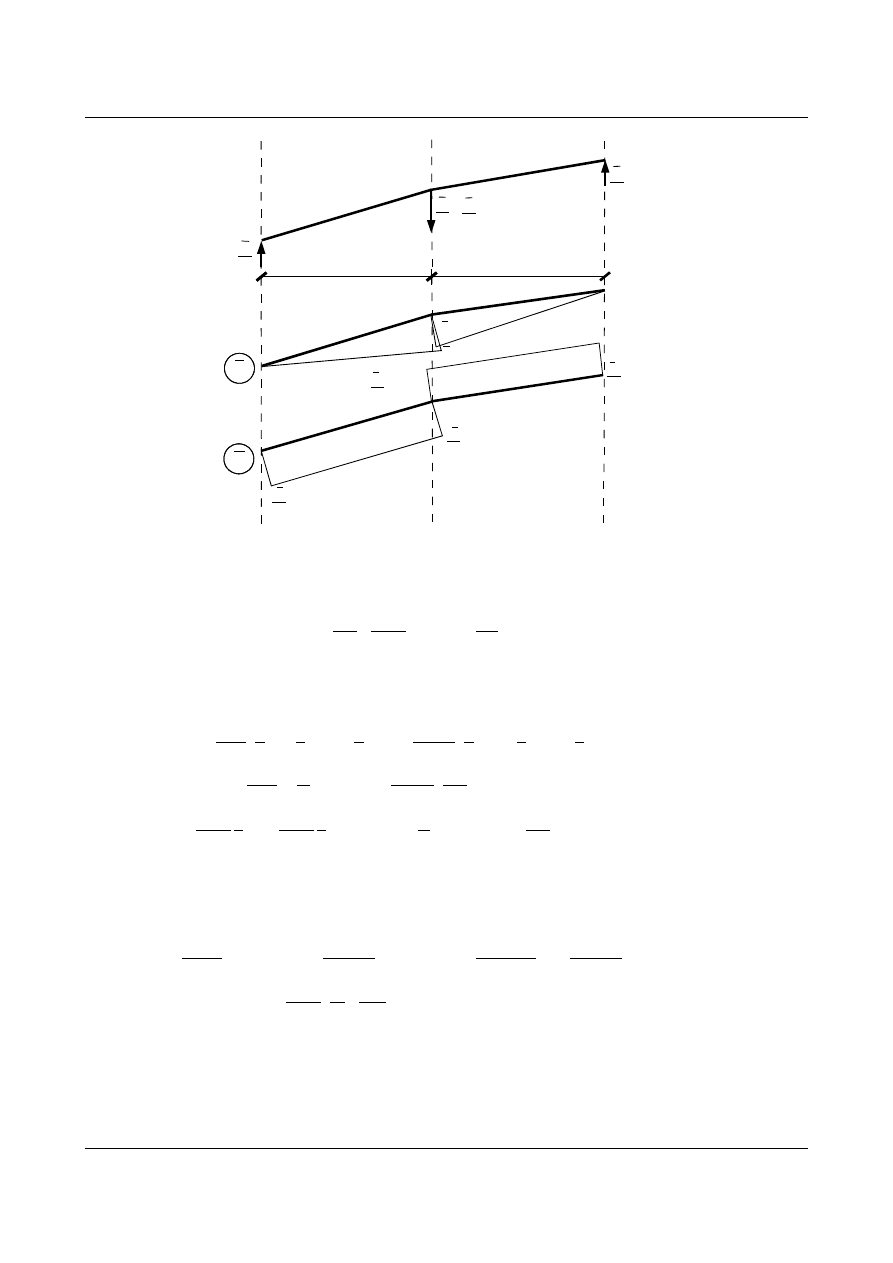
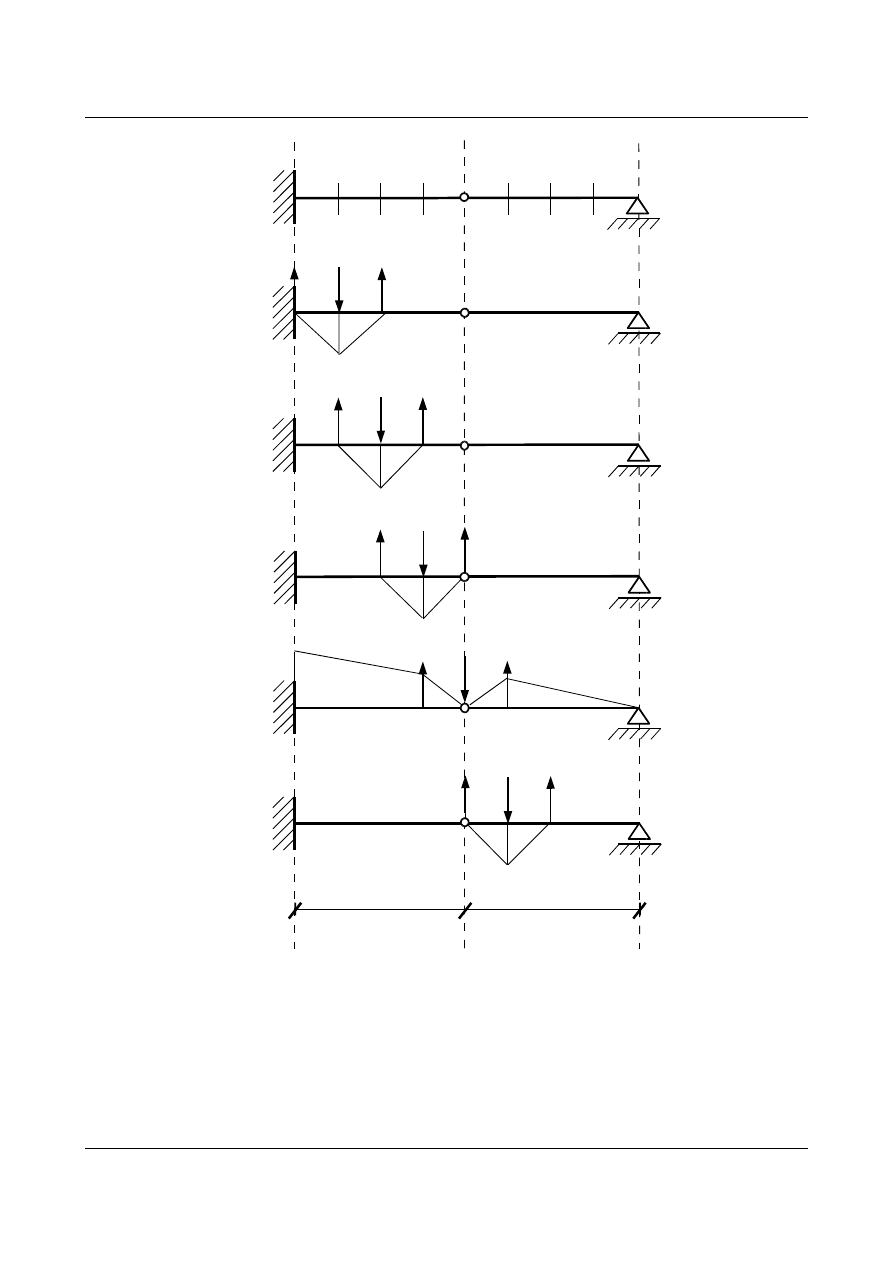
W przypadku występowania przegubu wewnętrznego ciężar sprężysty dla tego punktu należy obliczyć
indywidualnie biorąc pod uwagę fakt, że wykresy momentów wirtualnych występują w całym układzie
(rys. 6.28).
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
20
0
1
2
3
4
5
6
7
8
dla w
1
dla w
2
dla w
4
dla w
3
4
4
dla w
5
Rys. 6.28. Belka z przegubem wewnętrznym
Podobnie w układach kratowych z przegubem wewnętrznym trzeba zwrócić uwagę na ciężar sprężysty dla
przegubu.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Część 1
6. WYZNACZANIE LINII UGIĘCIA W UKŁADACH PRĘTOWYCH
21
a
k
a
k+1
a
m
a
m+1
m
A
B
H
A
=0
H
B
=0
R
B
=0
R
B
=0
H
A
=
R
A
=0
R
A
=0
w
k
w
m
u
k
u
m
f
k
+
1
a
m
1
a
m+1
1
a
k
1
a
k+1
+
1
a
k
1
a
k+1
1
a
m
1
a
m+1
1
f
H
B
=
1
f
Rys. 6.29. Układ trójprzegubowy
Wszystkie wartości
w
k
obliczamy w układach samorównoważących się (siły tylko w niektórych
prętach). Natomiast wielkość
w
m
obliczamy z uwzględnieniem faktu, że obciążenie wirtualne w punkcie
m
wywołuje reakcje poziome
H. Zatem stan naprężenia występuje we wszystkich prętach kratownicy a nie jak
poprzednio tylko w otoczeniu obciążonych węzłów.
Dobra D., Jambrożek S., Komosa M., Mikołajczak E., Przybylska P., Sysak A., Wdowska A.
AlmaMater
Wyszukiwarka
Podobne podstrony:
Prawo 06.12.11 - prawo cywilne, Dziennikarstwo i komunikacja społeczna (KUL) I stopień, Rok 1, semes
Mikołajki 06.12.2012, BACHAMAS, Kronika 2012 2013
12 06 12
2015 03 06 12 31 55 1
F II ME 08 06 12 2012
Bogdanowicz 06 12 2008
Odpowiedzi egzamin 2 (28 06 12)
2015 03 06 12 31 55
Kryon 06 12 06 Public Channeling
17 06 12 Projekt Zbiornika Ciśnieniowego
czapelski SzNP 06 12
Makroekonomia Wykład 06 12 2009
2015 03 06 12 31 55 3
metodyka pracy opeikunczo wychowaczej, Metodyka pracy opiekuńczo - wychowawczej 06.12.2008
06 12 86
2015 03 06 12 31 55 2
Koncepcja zarzšdzania - Wykład 06.12.2009, HR STUDIA
Portfolio projektu 06 12 2010
Makroekonomia Wykład 06.12.2009, HR STUDIA
więcej podobnych podstron