
3. OSIĄGANIE CELU POPRZEZ
3. OSIĄGANIE CELU POPRZEZ
POSZUKIWANIA
POSZUKIWANIA
NIEINFORMOWANE
© F.A. Dul 2007

Poszukiwania nieinformowane
Poka
ż
emy w jaki sposób agent mo
ż
e
Poka
ż
emy w jaki sposób agent mo
ż
e
osi
ą
gn
ąć
zamierzony cel poprzez
osi
ą
gn
ąć
zamierzony cel poprzez
wykonanie ci
ą
gu działa
ń
.
Działania te b
ę
d
ą
wyznaczone
Działania te b
ę
d
ą
wyznaczone
poprzez poszukiwania oparte
wył
ą
cznie na definicji zadania.
wył
ą
cznie na definicji zadania.
© F.A. Dul 2007

Niniejszy rozdział po
ś
wi
ę
cony jest agentom celowym,
3.1. Wprowadzenie
Niniejszy rozdział po
ś
wi
ę
cony jest agentom celowym,
których działanie oparte jest na poszukiwaniu rozwi
ą
zania
w zbiorze rozwi
ą
za
ń
dopuszczalnych.
w zbiorze rozwi
ą
za
ń
dopuszczalnych.
Na takiej zasadzie opiera si
ę
działanie wielu agentów, np.:
• agenci - obiekty w grach komputerowych, symulatorach;
• agenci - obiekty w grach komputerowych, symulatorach;
• oprogramowanie przewodników drogi wykorzystuj
ą
cych
system GPS,
system GPS,
• agenci poszukuj
ą
cy w Internecie stron z
żą
dan
ą
zawarto
ś
ci
ą
.
Poszukiwanie nieinformowane (uninformed search) polega
na wyznaczaniu rozwi
ą
zania zadania wył
ą
cznie na podstawie
danych definiuj
ą
cych zadanie.
danych definiuj
ą
cych zadanie.
Poszukiwanie informowane (informed search) polega na
wyznaczaniu rozwi
ą
zania zadania przy wykorzystaniu innej
© F.A. Dul 2007
wyznaczaniu rozwi
ą
zania zadania przy wykorzystaniu innej
dost
ę
pnej wiedzy, specyficznej dla tego zadania.

3.1. Wprowadzenie
Plan rozdziału
• Agenci rozwi
ą
zuj
ą
cy zadania.
• Rodzaje zada
ń
.
• Sformułowania zada
ń
.
• Sformułowania zada
ń
.
• Przykłady zada
ń
.
• Podstawowe algorytmy poszukiwa
ń
.
• Podstawowe algorytmy poszukiwa
ń
.
© F.A. Dul 2007

3.2. Agent poszukuj
ą
cy rozwi
ą
zania
Agent poszukuj
ą
cy rozwi
ą
zania jest rodzajem agenta
Agent poszukuj
ą
cy rozwi
ą
zania jest rodzajem agenta
celowego.
Czetry kroki przy rozwi
ą
zywaniu problemu
• Sformułowanie celu zadania
– jaki stan systemu odpowiada osi
ą
gni
ę
ciu celu?
Czetry kroki przy rozwi
ą
zywaniu problemu
– jaki stan systemu odpowiada osi
ą
gni
ę
ciu celu?
• Sformułowanie zadania
– jakie stany i działania nale
ż
y bra
ć
pod uwag
ę
?
• Poszukiwanie
• Poszukiwanie
– okre
ś
li
ć
optymalne działania które nale
ż
y wykona
ć
aby
osi
ą
gn
ąć
cel
• Wykonanie zadania
– wyznaczy
ć
rozwi
ą
zanie
© F.A. Dul 2007

Algorytm agenta poszukuj
ą
cego rozwi
ą
zania
3.2. Agent poszukuj
ą
cy rozwi
ą
zania
function SIMPLE-PROBLEM-SOLVING-AGENT(percept) return an action
static: seq, an action sequence
state, some description of the current world state
state, some description of the current world state
goal, a goal
problem, a problem formulation
problem, a problem formulation
state
←
UPDATE-STATE(state, percept)
if seq is empty then
if seq is empty then
goal
←
FORMULATE-GOAL(state)
problem
←
FORMULATE-PROBLEM(state,goal)
problem
←
FORMULATE-PROBLEM(state,goal)
seq
←
SEARCH(problem)
action
←
FIRST(seq)
seq
←
REST(seq)
seq
←
REST(seq)
return action
© F.A. Dul 2007
3.2. Agent poszukuj
ą
cy rozwi
ą
zania
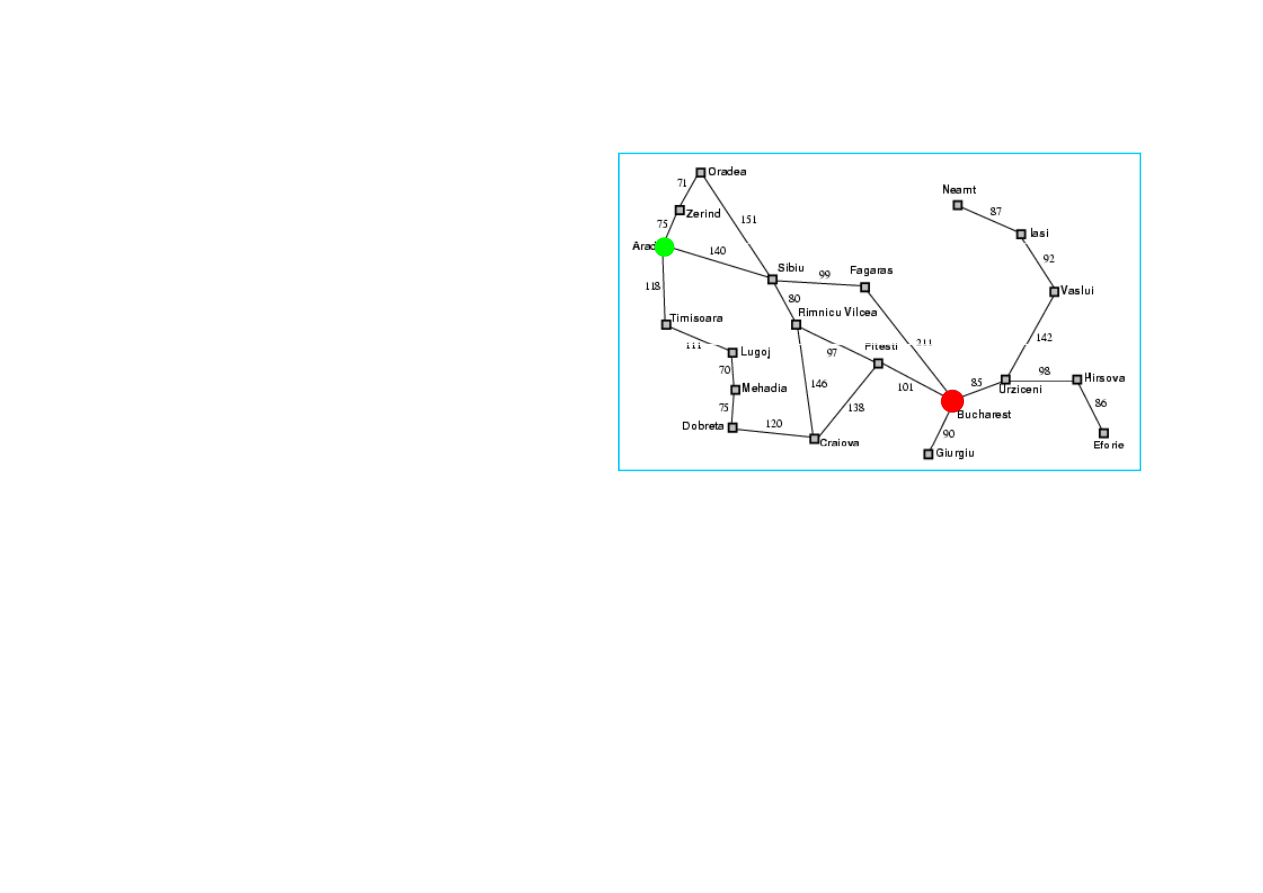
Przykład - poszukiwanie najkrótszej drogi
• Wakacje w Rumunii;
jeste
ś
my w mie
ś
cie
jeste
ś
my w mie
ś
cie
Arad.
• Jutro musimy odlecie
ć
• Sformułowanie celu
:
• Jutro musimy odlecie
ć
z Bukaresztu.
• Sformułowanie celu
:
– nale
ż
y jutro rano by
ć
w Bukareszcie.
• Sformułowanie zadania
:
• Sformułowanie zadania
:
– stan
: pobyt w jakim
ś
mie
ś
cie;
– działania
: przejazdy pomi
ę
dzy miastami.
– działania
: przejazdy pomi
ę
dzy miastami.
• Znale
źć
rozwi
ą
zanie
:
– ci
ą
g miast, { Arad , … , Bukareszt }
© F.A. Dul 2007
– ci
ą
g miast, { Arad , … , Bukareszt }
np. { Arad, Sibiu, Fagaras, Bukareszt }.

3.3. Rodzaje zada
ń
Zadanie najprostsze
• Deterministyczne, obserwowalne
⇒
⇒
⇒
⇒
zadanie jednostanowe
– agent wie w jakim jest stanie i w jakim stanie b
ę
dzie;
Zadanie najprostsze
– agent wie w jakim jest stanie i w jakim stanie b
ę
dzie;
rozwi
ą
zanie jest ci
ą
giem stanów;
Zadania znacznie trudniejsze:
• Nieobserwowalne
⇒
⇒
⇒
⇒
zadanie bez czujników (conformant
problem)
Zadania znacznie trudniejsze:
problem)
– agent nie wie, gdzie jest; rozwi
ą
zanie jest ci
ą
giem stanów;
• Niedeterministyczne lub obserwowalne cz
ęś
ciowo
• Niedeterministyczne lub obserwowalne cz
ęś
ciowo
⇒
⇒
⇒
⇒
nieprzewidywalne
(contingency problem)
– obserwacje dostarczaj
ą
nowych
informacji o stanie bie
żą
cym,
– poszukiwania cz
ę
sto
przeplataj
ą
si
ę
z działaniami.
– poszukiwania cz
ę
sto
przeplataj
ą
si
ę
z działaniami.
• Nieznana przestrze
ń
stanów
⇒
⇒
⇒
⇒
exploration problem
© F.A. Dul 2007
3.3. Rodzaje zada
ń
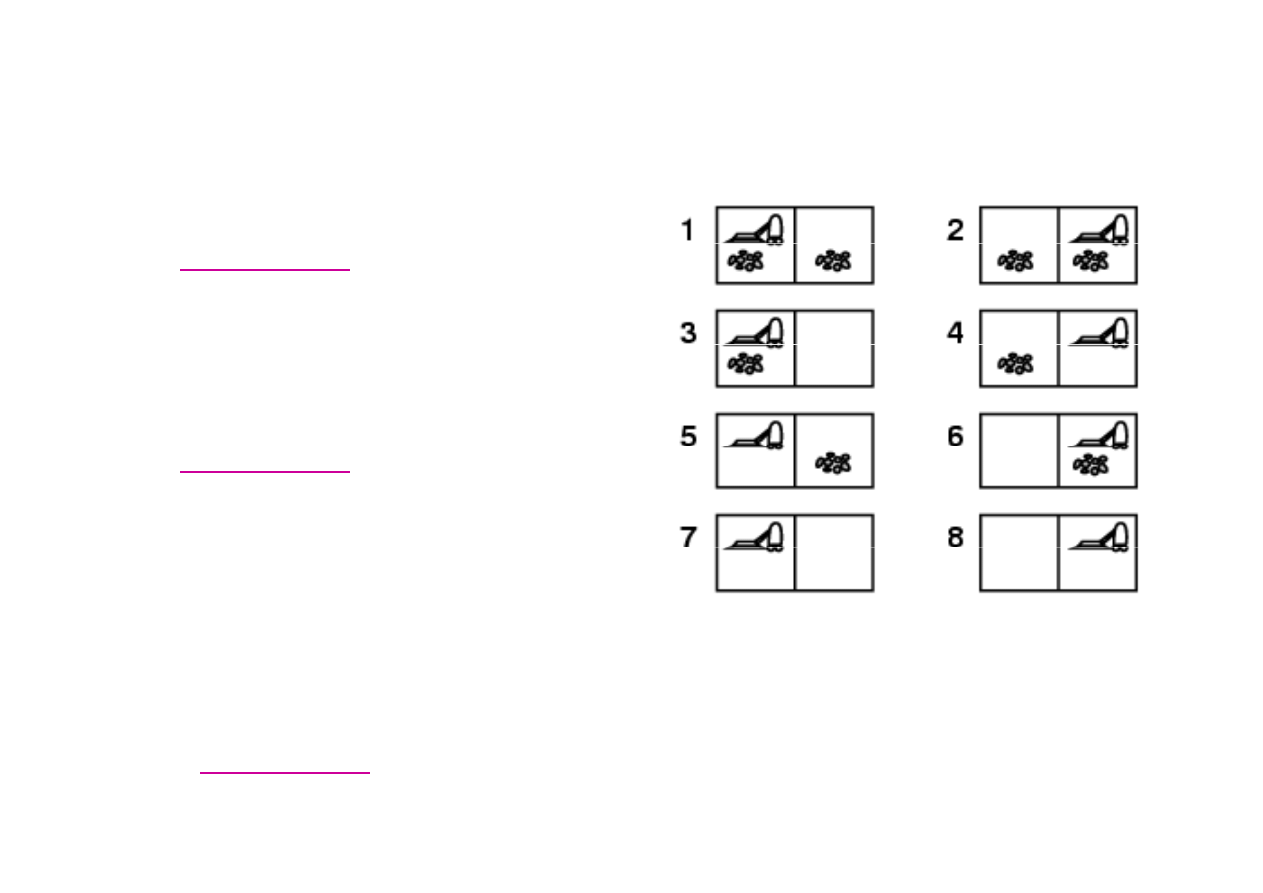
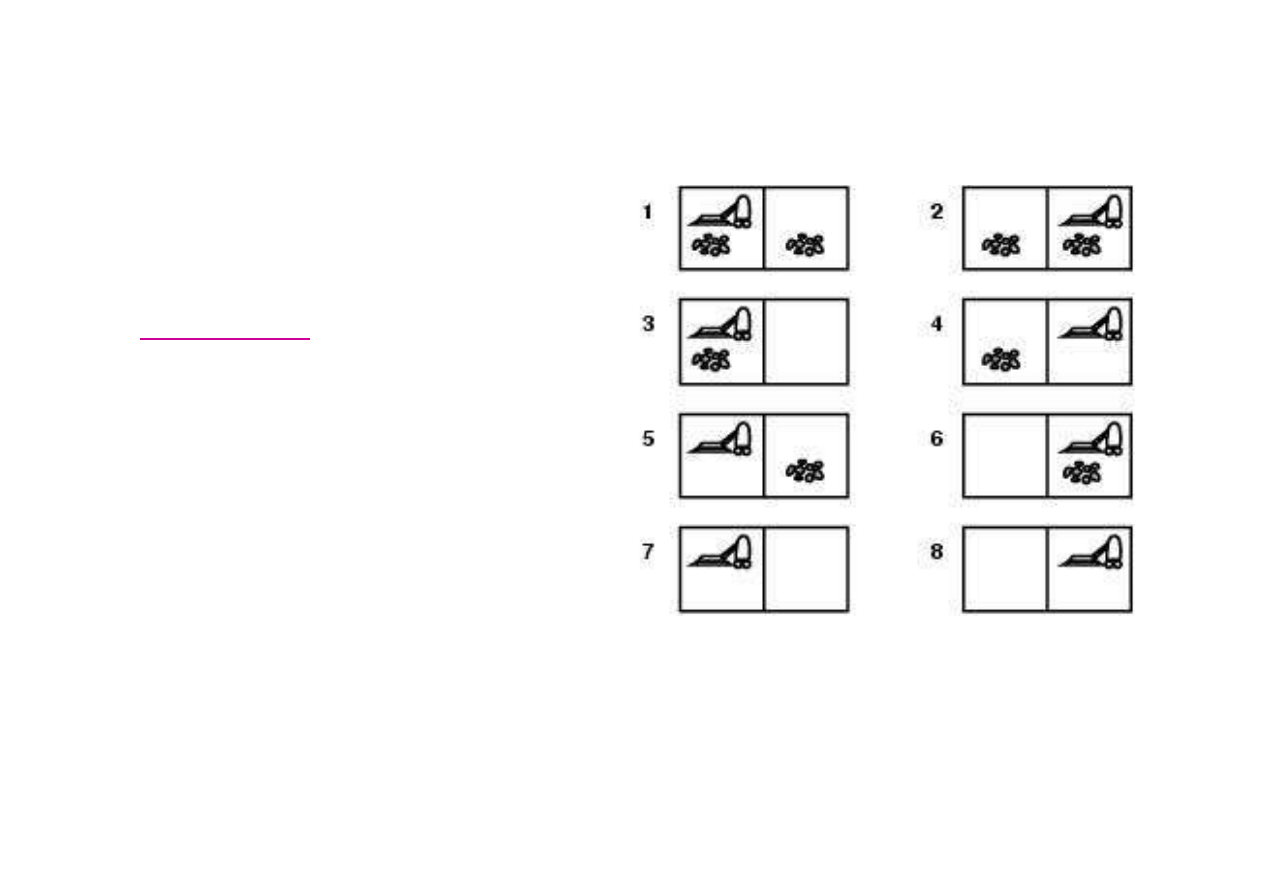
Przykład -
ś
wiat agenta-odkurzacza
•
Problem jednostanowy
, start
ze stanu {5}.
Rozwi
ą
zanie
Zbiór wszystkich stanów
Rozwi
ą
zanie
[ W PRAWO , ODKURZAJ ]
•
Bez czujników,
start z dowolnego
•
Bez czujników,
start z dowolnego
stanu spo
ś
ród {1,2,3,4,5,6,7,8}
W PRAWO {2,4,6,8}
Rozwi
ą
zanie
Rozwi
ą
zanie
[ W PRAWO , ODKURZAJ ,
W LEWO , ODKURZAJ ]
W LEWO , ODKURZAJ ]
•
Nieprzewidywalno
ść
– Niedeterministyczne: ODKURZAJ mo
ż
e za
ś
mieci
ć
czysty dywan
– Niedeterministyczne: ODKURZAJ mo
ż
e za
ś
mieci
ć
czysty dywan
– Cz
ęś
ciowa obserwowalno
ść
: poło
ż
enie,
ś
mieci w aktualnym poło
ż
eniu.
– Obserwacja: [L, CZYSTY], tj. start za stanów 5 lub 7.
Rozwi
ą
zanie
© F.A. Dul 2007
Rozwi
ą
zanie
[ W PRAWO , je
ż
eli
Ś
MIECI to ODKURZAJ ]

Zadanie jednostanowe - sformułowanie
3.3. Rodzaje zada
ń
•
stanu pocz
ą
tkowego
, np. "w Arad”,
Zadanie jednostanowe zdefiniowane jest za pomoc
ą
czterech
elementów:
•
stanu pocz
ą
tkowego
, np. "w Arad”,
•
działa
ń
lub funkcji nast
ę
pstwa
S(x) = zbiór par
〈
działanie , stan
〉
S(x) = zbiór par
〈
działanie , stan
〉
np. S(Arad) = {
〈〈〈〈
Arad
→
Zerind, Zerind
〉〉〉〉
, … }
•
testu osi
ą
gni
ę
cia celu
:
– jawny, np. x = ”w Bukareszcie”,
– niejawny, np.w szachach Mat(x);
•
kosztu drogi
(addytywnego)
•
kosztu drogi
(addytywnego)
– np. sumy odległo
ś
ci, liczby podj
ę
tych działa
ń
, etc.
– c(x,a,y) jest kosztem kroku, z zało
ż
enia c
≥
0
– c(x,a,y) jest kosztem kroku, z zało
ż
enia c
≥
0
Rozwi
ą
zaniem zadania jednostanowego jest ci
ą
g działa
ń
prowadz
ą
cych ze stanu pocz
ą
tkowego do stanu docelowego.
© F.A. Dul 2007
prowadz
ą
cych ze stanu pocz
ą
tkowego do stanu docelowego.
Rozwi
ą
zanie optymalne cechuje najmniejszy koszt.

Zadanie jednostanowe - sformułowanie
3.3. Rodzaje zada
ń
•
Ś
wiat rzeczywisty jest kra
ń
cowo skomplikowany, dlatego
przestrze
ń
stanów musi by
ć
abstrakcj
ą
stanów rzeczywistych.
Abstrakcja oznacza
pomini
ę
cie szczegółów
.
Abstrakcja oznacza
pomini
ę
cie szczegółów
.
• Stan abstrakcyjny = zbiór stanów rzeczywistych.
• Działanie abstrakcyjne = zło
ż
ona kombinacja działa
ń
• Działanie abstrakcyjne = zło
ż
ona kombinacja działa
ń
rzeczywistych,
np. "Arad
→
Zerind" reprezentuje zło
ż
ony zbiór mo
ż
liwych
np. "Arad
→
Zerind" reprezentuje zło
ż
ony zbiór mo
ż
liwych
tras, objazdy, parkingi, etc.
• Aby zapewni
ć
istnienie rozwi
ą
zania, ka
ż
dy stan rzeczywisty
(np. ”Arad“) musi prowadzi
ć
do jakiego
ś
stanu rzeczywistego
(np. ”Arad“) musi prowadzi
ć
do jakiego
ś
stanu rzeczywistego
(np. „Zerind”).
• Rozwi
ą
zanie abstrakcyjne = zbiór rzeczywistych dróg które
• Rozwi
ą
zanie abstrakcyjne = zbiór rzeczywistych dróg które
s
ą
rozwi
ą
zaniami w
ś
wiecie rzeczywistym.
• Kazde działanie abstrakcyjne powinno by
ć
łatwiejsze ni
ż
© F.A. Dul 2007
• Kazde działanie abstrakcyjne powinno by
ć
łatwiejsze ni
ż
rzeczywiste.
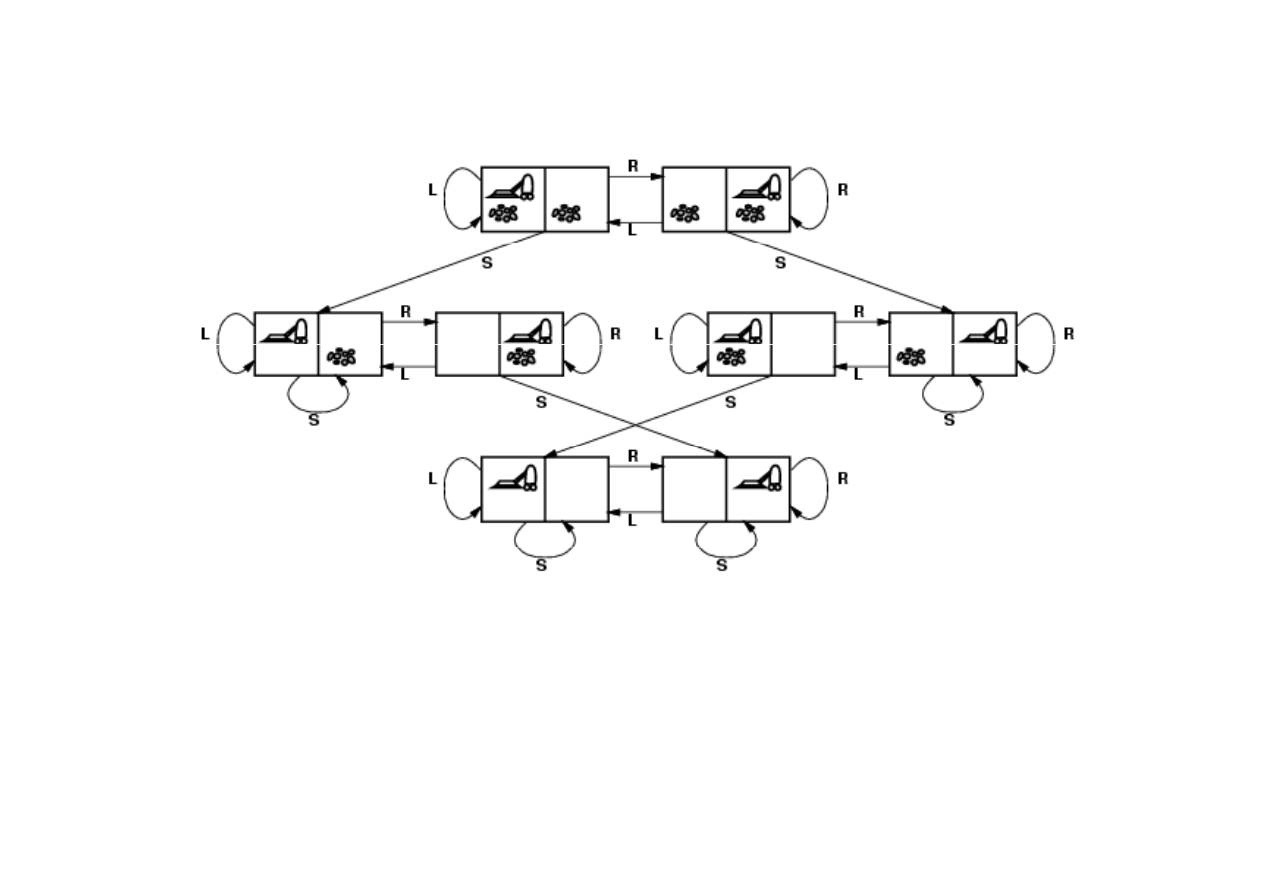
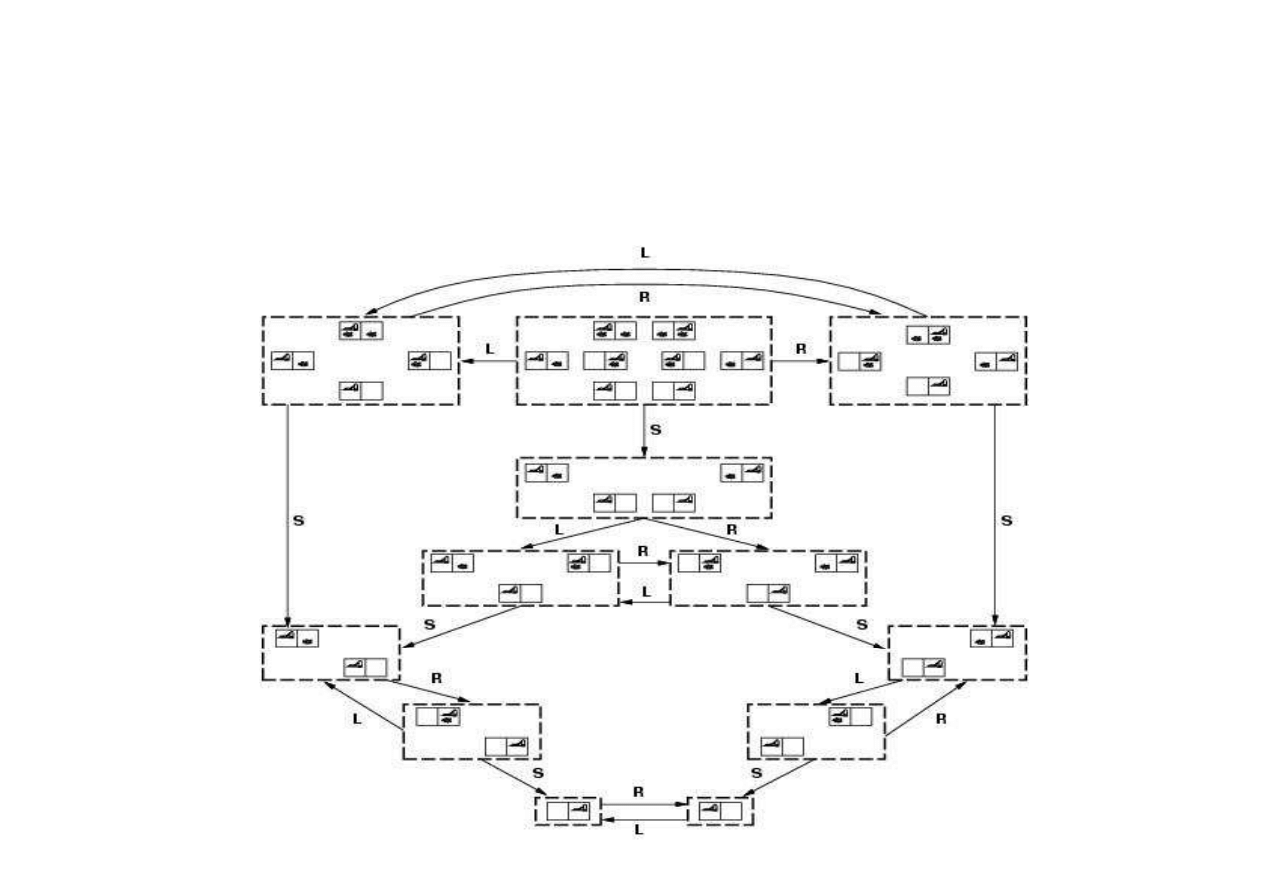
Graf przestrzeni stanów dla
ś
wiata odkurzacza
3.3. Rodzaje zada
ń
• stan:
poło
ż
enie odkurzacza oraz czysto
ść
;
• stan pocz
ą
tkowy: ka
ż
dy;
• stan pocz
ą
tkowy: ka
ż
dy;
• działania:
W LEWO, W PRAWO, ODKURZAJ;
• test celu:
czysto we wszystkich poło
ż
eniach;
© F.A. Dul 2007
• test celu:
czysto we wszystkich poło
ż
eniach;
• koszt:
1 za ka
ż
de działanie;
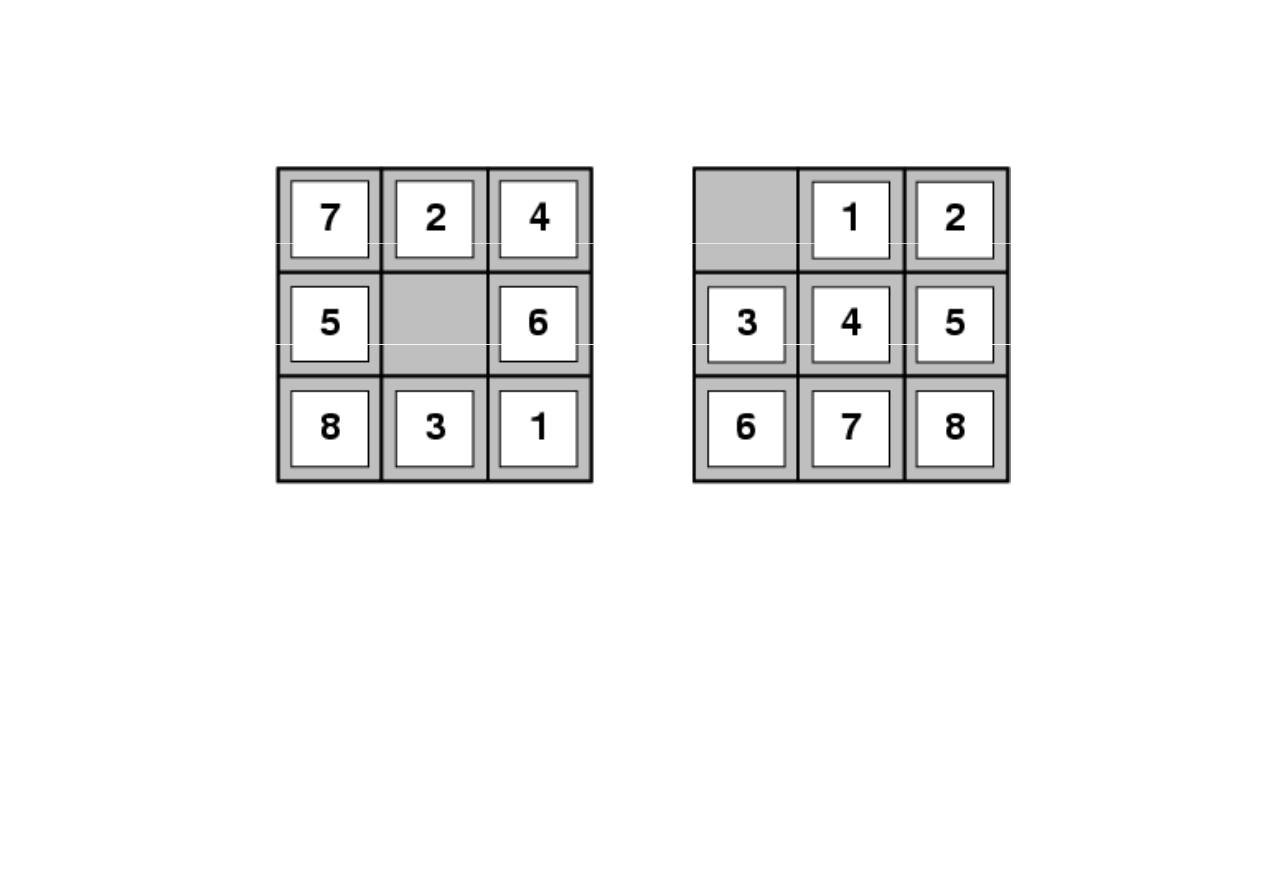
Przykład: gra w osiem puzzli
3.3. Rodzaje zada
ń
Stan pocz
ą
tkowy Stan docelowy
• stan:
poło
ż
enie puzzli 1 - 8;
• działania: ruch pola pustego: w lewo, w prawo,w gór
ę
,
w dół;
w dół;
• test celu:
osi
ą
gni
ę
cie zadanego układu puzzli;
• koszt:
1 za ka
ż
dy ruch;
© F.A. Dul 2007
• koszt:
1 za ka
ż
dy ruch;
Rozwi
ą
zanie optymalne problemu n puzzli jest zadaniem NP-hard
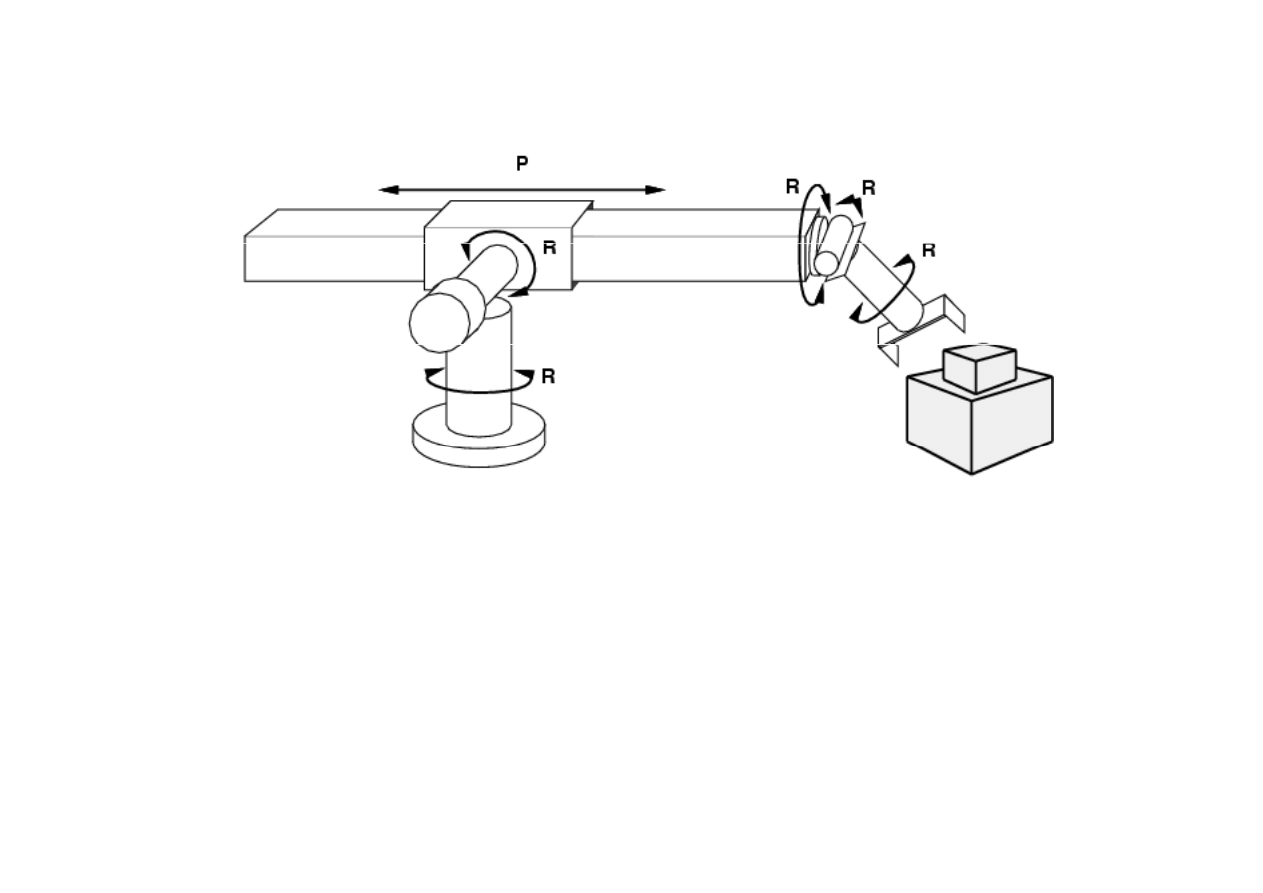
Przykład: monta
ż
przy u
ż
yciu robota
3.3. Rodzaje zada
ń
• stan:
wieloelementowa tablica poło
ż
enia
• stan:
wieloelementowa tablica poło
ż
enia
ramienia robota oraz poło
ż
enia
montowanych elementów;
• działania: ci
ą
gły ruch ramienia robota, chwytanie
• działania: ci
ą
gły ruch ramienia robota, chwytanie
i puszczanie elementów;
• test celu:
zmontowane urz
ą
dznie;
© F.A. Dul 2007
• test celu:
zmontowane urz
ą
dznie;
• koszt:
czas monta
ż
u urz
ą
dzenia;

Inne przykłady zada
ń
ze
ś
wiata rzeczywistego
3.3. Rodzaje zada
ń
• Wyznaczanie drogi: wyznaczanie trasy ł
ą
cz
ą
cej w
ę
zły:
pocz
ą
tkowy i ko
ń
cowy;
• Problem zwiedzania: wyznaczanie trasy przebiegaj
ą
cej
• Problem zwiedzania: wyznaczanie trasy przebiegaj
ą
cej
przez w
ę
zły (np. miasta) tylko jeden raz;
• Problem komiwoja
ż
era: wyznaczenie najkrótszej trasy
• Problem komiwoja
ż
era: wyznaczenie najkrótszej trasy
przebiegaj
ą
cej przez w
ę
zły tylko jeden raz;
• Planowanie obwodów VLSI: rozmieszczanie elementów
układu i wyznaczanie poł
ą
cze
ń
mi
ę
dzy nimi;
układu i wyznaczanie poł
ą
cze
ń
mi
ę
dzy nimi;
• Nawigacja robotów: ci
ą
gła wersja problemu wyznaczania
drogi;
drogi;
• Planowanie automatycznego monta
ż
u: wyznaczenie
wła
ś
ciwej kolejno
ś
ci monta
ż
u elementów;
• Synteza protein: wyznaczenie wła
ś
ciwej kolejno
ś
ci
aminokwasów białka o okre
ś
lonych własno
ś
ciach;
• Poszukiwania w Internecie: wyznaczenie trasy
© F.A. Dul 2007
• Poszukiwania w Internecie: wyznaczenie trasy
poszukiwa
ń
żą
danych informacji na stronach Internetu;

3.3. Rodzaje zada
ń
Podstawow
ą
zasad
ą
poszukiwa
ń
nieinformowanych jest korzystanie
nieinformowanych jest korzystanie
wył
ą
cznie z definicji zadania - bez
wykorzystywania dodatkowych
wykorzystywania dodatkowych
informacji.
Przypomina to prób
ę
dojechania
w mie
ś
cie samochodem na podany
w mie
ś
cie samochodem na podany
adres gdy zna si
ę
tylko ten adres oraz
adres gdy zna si
ę
tylko ten adres oraz
reguły prowadzenia samochodu.
© F.A. Dul 2007
3.4. Algorytmy przeszukiwania drzew
Idea algorytmów przeszukuj
ą
cych
Idea algorytmów przeszukuj
ą
cych
•
ś
lepe poszukiwania: analiza wszystkich mo
ż
liwych
sekwencji stanów;
sekwencji stanów;
– koszt ro
ś
nie gwałtownie ze wzrostem liczby mo
ż
liwych
stanów;
• poszukiwania poprzez budow
ę
drzewa stanów:
• poszukiwania poprzez budow
ę
drzewa stanów:
– KORZE
Ń
- stan pocz
ą
tkowy;
– w
ę
zły i gał
ę
zie generowane funkcj
ą
nast
ę
pstwa;
function TREE-SEARCH(problem,strategy) returns a solution or failure
Ogólnie: przeszukiwanie generuje graf.
function TREE-SEARCH(problem,strategy) returns a solution or failure
initialize the search tree using the initial state of problem
do
if there are no candidates to expand then return failure
if there are no candidates to expand then return failure
choose a legal node for expansion according to strategy
if the node contains a goal state then return corresponding solution
else expand the node and add the resulting nodes to the search tree
© F.A. Dul 2007
else expand the node and add the resulting nodes to the search tree
od
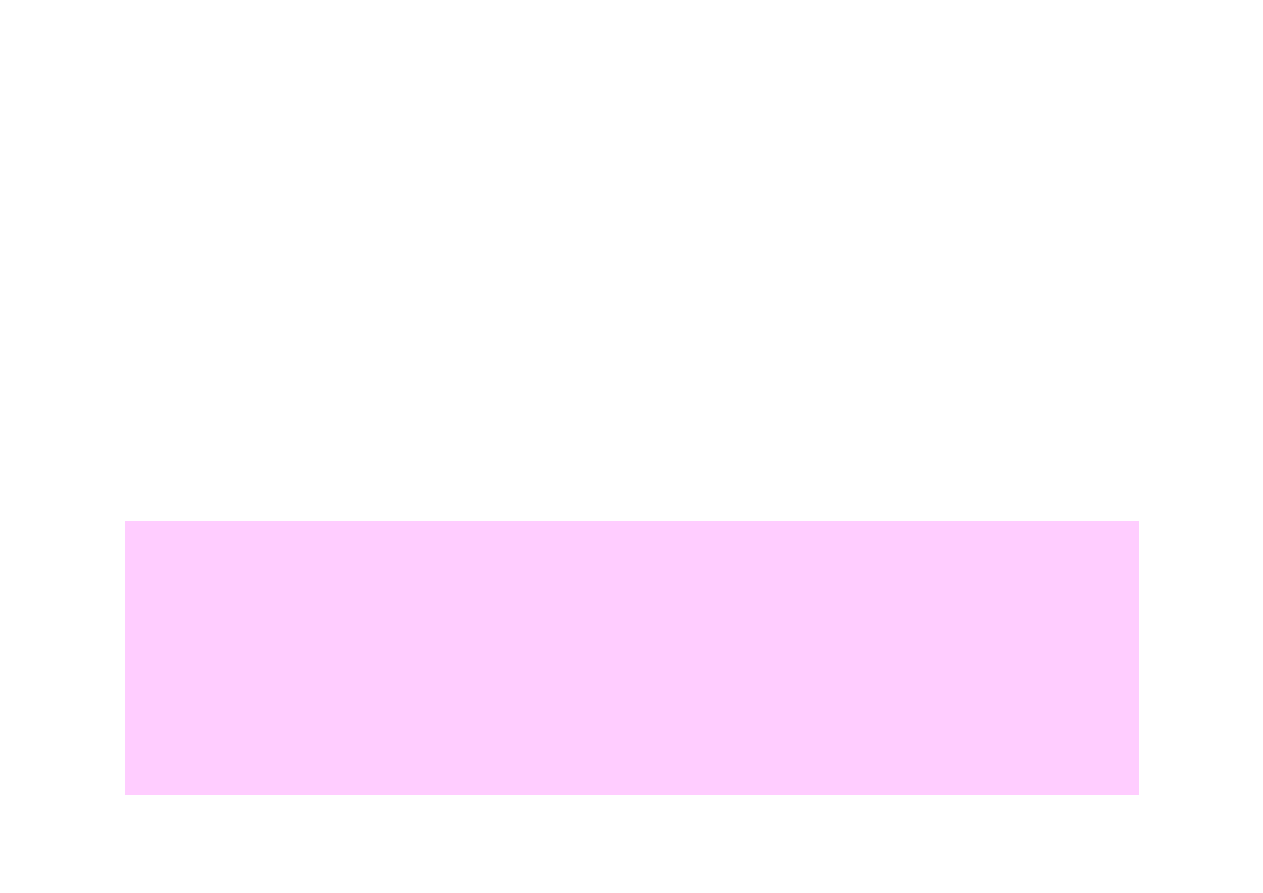
Algorytmy przeszukiwania drzewa - przykład
3.4. Algorytmy przeszukiwania drzew
Stan pocz
ą
tkowy
Poziom 1.
Poziom 2.
function TREE-SEARCH(problem,strategy) returns a solution or failure
initialize the search tree using the initial state of problem
do
function TREE-SEARCH(problem,strategy) returns a solution or failure
initialize the search tree using the initial state of problem
do
function TREE-SEARCH(problem,strategy) returns a solution or failure
initialize the search tree using the initial state of problem
do
do
if there are no candidates to expand then return failure
choose a leaf node for expansion according to strategy
if the node contains a goal state then return corresponding solution
do
if there are no candidates to expand then return failure
choose a leaf node for expansion according to strategy
if the node contains a goal state then return corresponding solution
do
if there are no candidates to expand then return failure
choose a leaf node for expansion according to strategy
if the node contains a goal state then return corresponding solution
if the node contains a goal state then return corresponding solution
else expand the node and add the resulting nodes to the search tree
od
© F.A. Dul 2007
if the node contains a goal state then return corresponding solution
else expand the node and add the resulting nodes to the search tree
od
if the node contains a goal state then return corresponding solution
else expand the node and add the resulting nodes to the search tree
od
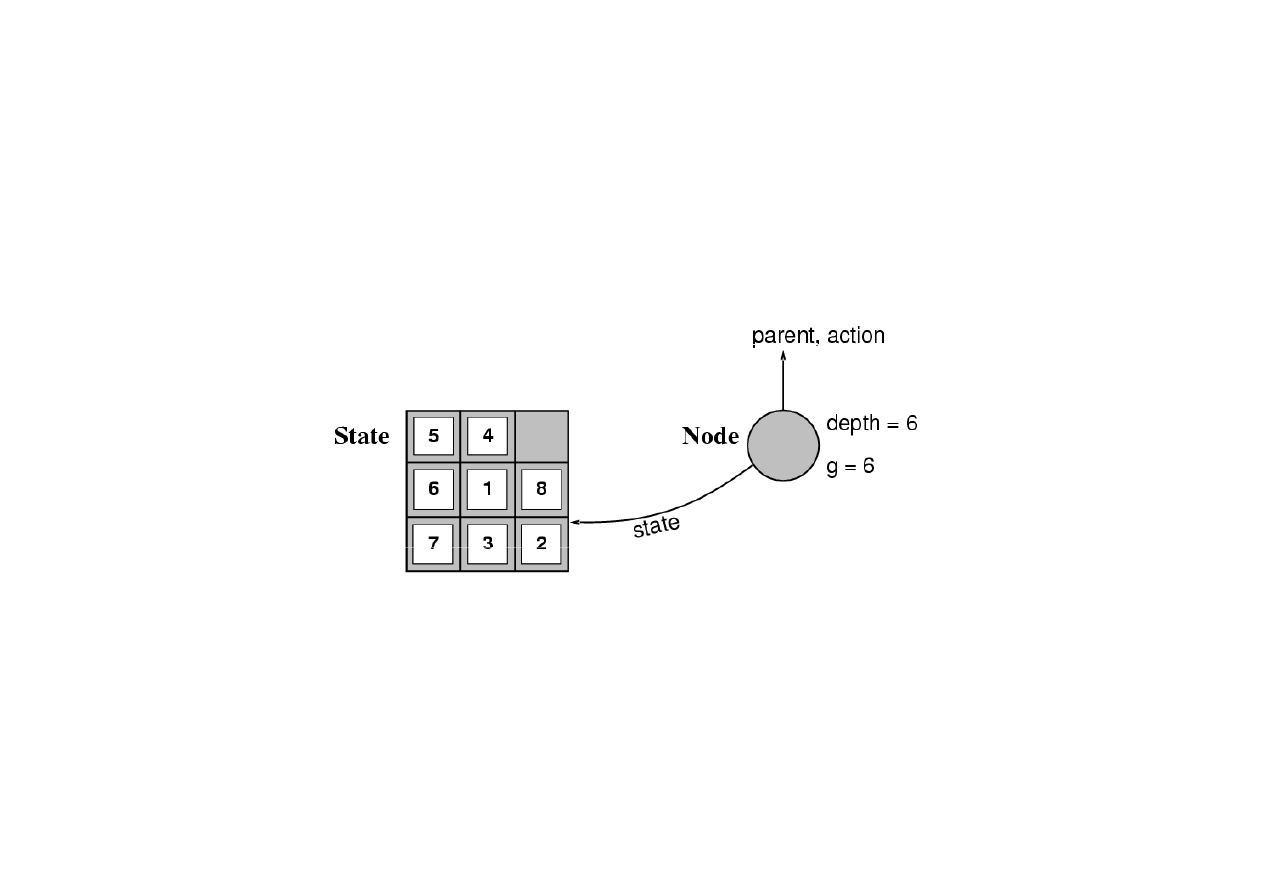
Ró
ż
nica pomi
ę
dzy stanem a w
ę
złem
3.4. Algorytmy przeszukiwania drzew
• Stan okre
ś
la konfiguracj
ę
fizyczn
ą
obiektu lub zadania;
• Stan okre
ś
la konfiguracj
ę
fizyczn
ą
obiektu lub zadania;
• W
ę
zeł jest to struktura danych okre
ś
laj
ą
ca cz
ęść
drzewa poszukiwa
ń
, obejmuj
ą
ca np.: stan, w
ę
zeł
drzewa poszukiwa
ń
, obejmuj
ą
ca np.: stan, w
ę
zeł
rodzica, w
ę
zły dzieci, koszt gał
ę
zi, aktualn
ą
gł
ę
boko
ść
,
podejmowane działanie, itp.;
w
ę
zeł =
〈〈〈〈
stan, w
ę
zeł rodzica, koszt, gł
ę
boko
ść
, działanie
〉〉〉〉
• Funkcja
Expand
tworzy nowe w
ę
zeł, wypełnia odpowiednie
• Funkcja
Expand
tworzy nowe w
ę
zeł, wypełnia odpowiednie
pola, a nast
ę
pnie przy pomocy funkcji
SuccessorFn
tworzy stan w nowym w
ęź
le.
© F.A. Dul 2007
• Brzeg (fringe) to zbiór wszystkich w
ę
złow, które nie zotały
jeszcze rozwini
ę
te.

Strategie algorytmów przeszukiwania drzew
3.4. Algorytmy przeszukiwania drzew
• Strategia poszukiwania jest okre
ś
lona
kolejno
ś
ci
ą
rozwijania w
ę
złów.
• Strategie s
ą
oceniane wg. nast
ę
puj
ą
cych kryterów:
– zupełno
ść
: mo
ż
liwo
ść
znalezienia rozwi
ą
zania, je
ż
eli
istnieje;
istnieje;
– zło
ż
ono
ść
czasowa
: liczba generowanych w
ę
złów;
– zło
ż
ono
ść
pami
ę
ciowa
: najwi
ę
ksza liczba w
ę
złów
w pami
ę
ci;
– zło
ż
ono
ść
pami
ę
ciowa
: najwi
ę
ksza liczba w
ę
złów
w pami
ę
ci;
– optymalno
ść
: mo
ż
liwo
ść
wyznaczenia najta
ń
szego
rozwi
ą
zania.
rozwi
ą
zania.
• Zło
ż
ono
ść
czasowa i pami
ę
ciowa s
ą
szacowane za pomoc
ą
nast
ę
puj
ą
cych wielko
ś
ci:
– b: maksymalny współczynnik rozgał
ę
zienia drzewa
poszukiwa
ń
,
– d: gł
ę
boko
ść
rozwi
ą
zania optymalnego,
© F.A. Dul 2007
– d: gł
ę
boko
ść
rozwi
ą
zania optymalnego,
– m: maksymalna gł
ę
boko
ść
przestrzeni stanów.

Strategie nieinformowane przeszukiwania drzew
3.4. Algorytmy przeszukiwania drzew
Strategie
nieinformowane
wykorzystuj
ą
tylko informacje
zawarte w definicji zadania.
Rodzaje strategii nieinformowanych:
Strategie nieinformowane - poszukiwania “na o
ś
lep”.
• Poszukiwanie wszerz (breadth-first search),
• Poszukiwanie w gł
ą
b (depth-first search),
• Poszukiwanie w gł
ą
b (depth-first search),
• Poszukiwanie z jednostajnym kosztem
(uniform-cost search),
• Poszukiwanie na ograniczon
ą
gł
ę
boko
ść
(depth-limited search),
• Poszukiwanie pogł
ę
biane iteracyjnie
(iterative deepening search).
• Poszukiwanie dwukierunkowe (bidrectional search).
© F.A. Dul 2007
• Poszukiwanie dwukierunkowe (bidrectional search).
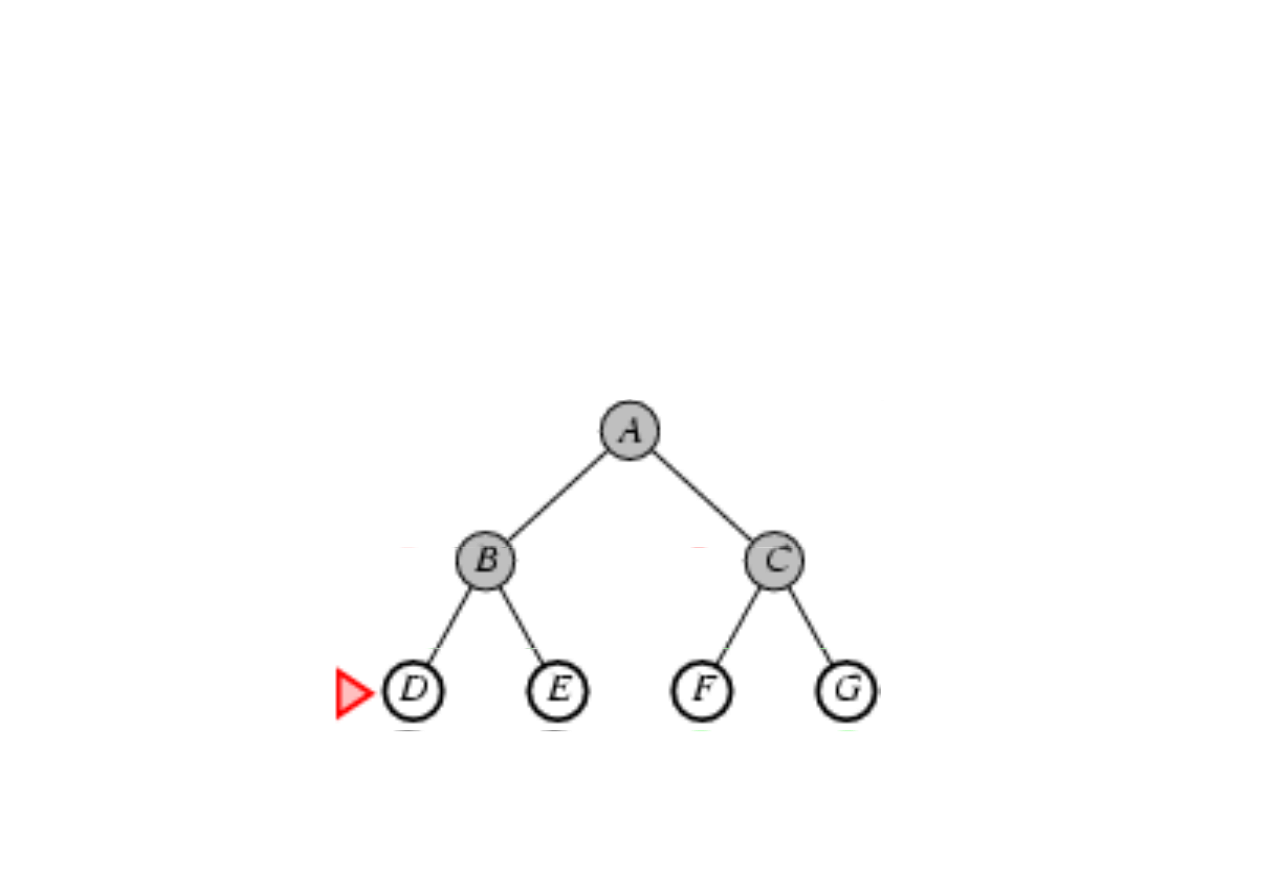
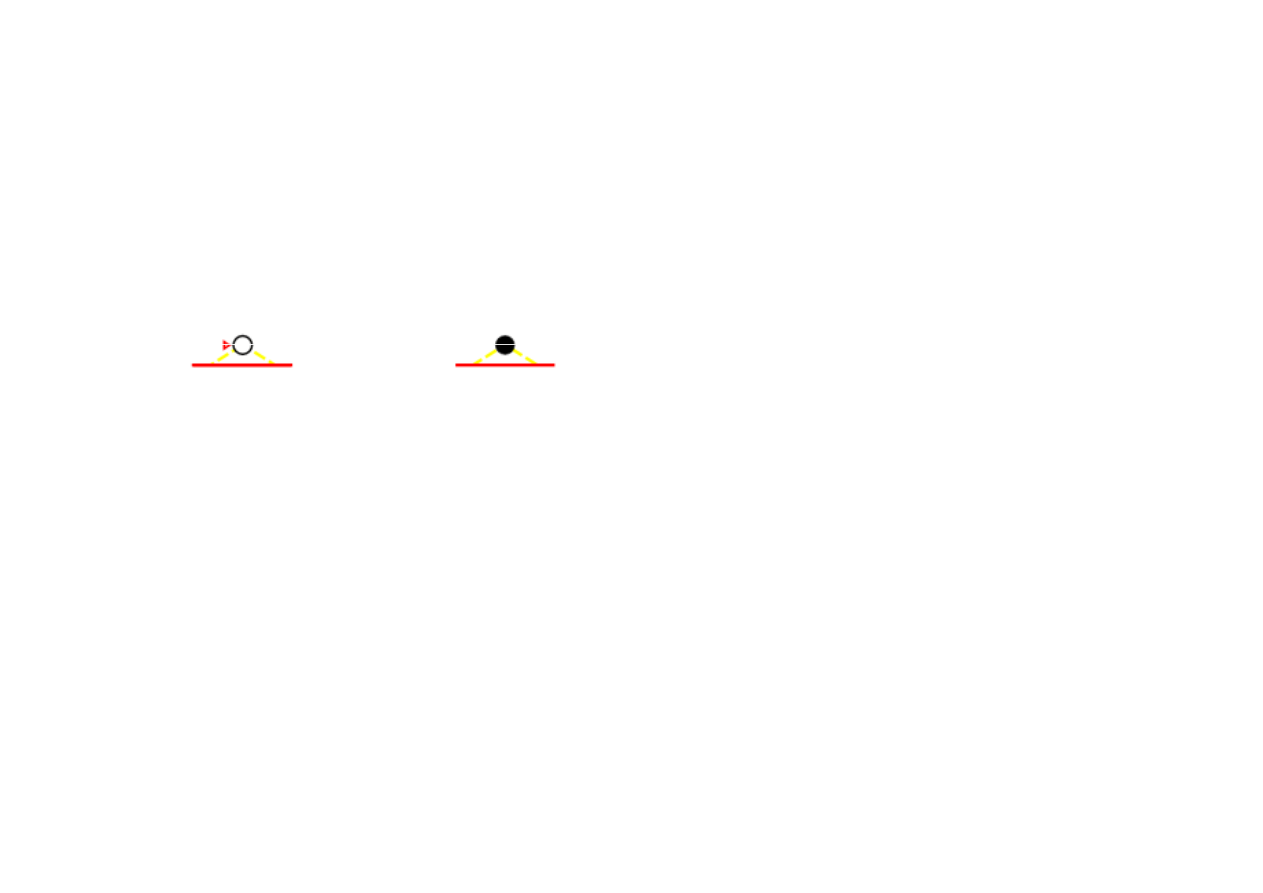
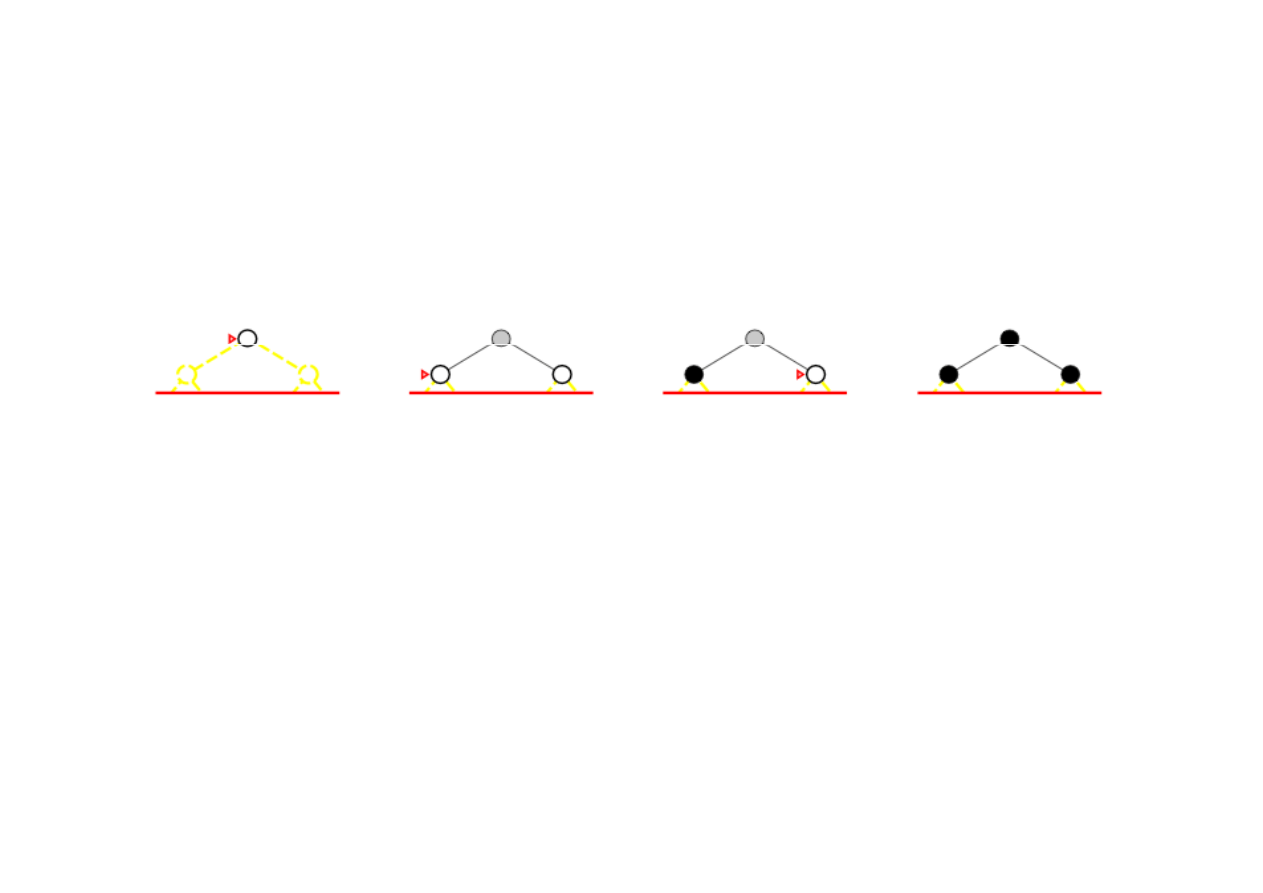
Poszukiwanie wszerz (breadth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najpłytszy nierozwini
ę
ty w
ę
zeł (najpłytszy
na brzegu).
Brzeg jest kolejk
ą
FIFO, tzn. nowy w
ę
zeł wstawiany jest na
koniec kolejki.
© F.A. Dul 2007
Poszukiwanie wszerz (breadth-first search)
3.4. Algorytmy przeszukiwania drzew
Własno
ś
ci algorytmu
• Zupełno
ść
Tak, je
ż
eli b jest ograniczone
• Zupełno
ść
Tak, je
ż
eli b jest ograniczone
• Czas
1+b+b
2
+b
3
+… +b
d
+ b(b
d
-1) = O(b
d+1
)
• Pami
ęć
O(b
d+1
) (przechowywanie wszystkich
w
ę
złów w pami
ę
ci)
w
ę
złów w pami
ę
ci)
• Optymalno
ść
Tak, je
ż
eli koszt kroku jest stały
• Pami
ęć
jest najwi
ę
kszym problemem, wi
ę
kszym ni
ż
czas
poszukiwa
ń
.
poszukiwa
ń
.
© F.A. Dul 2007
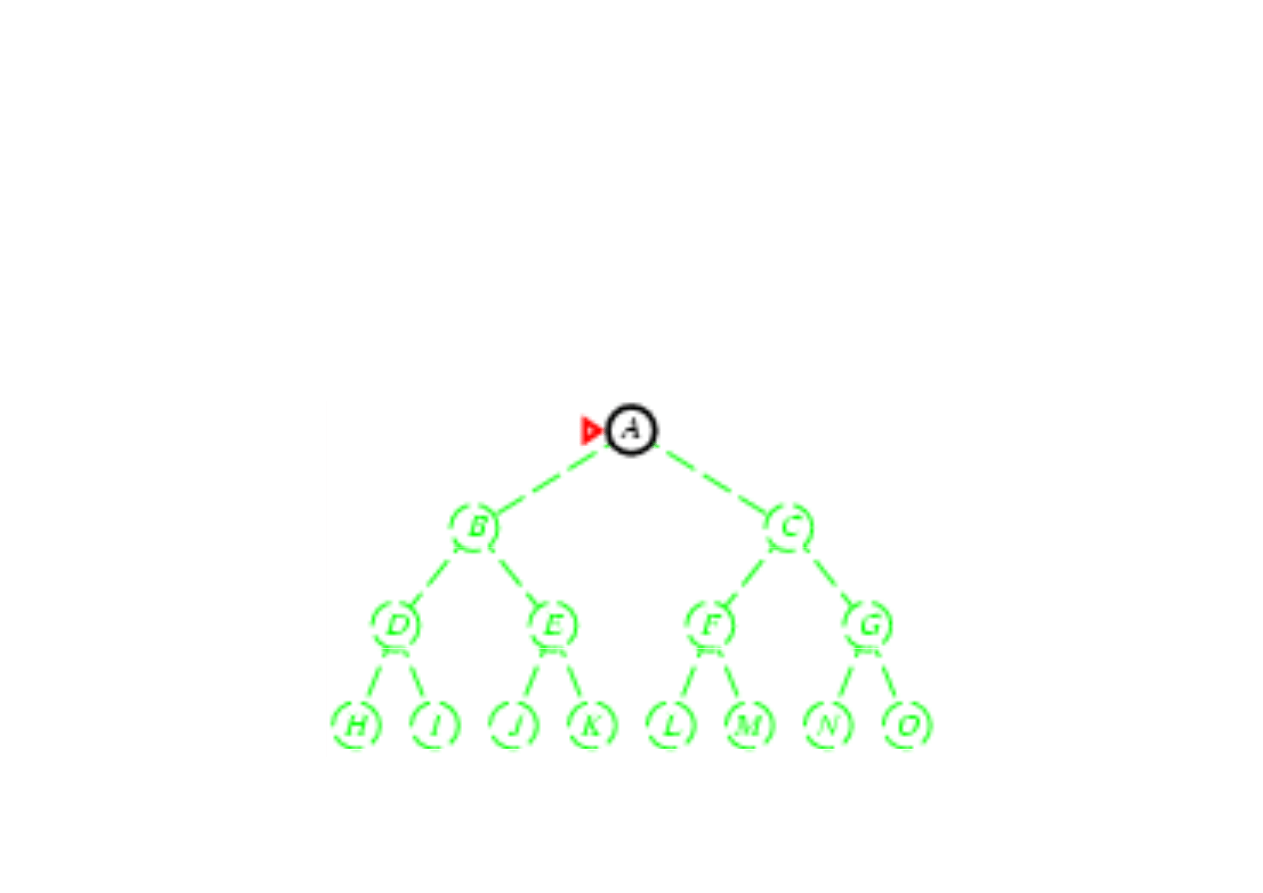
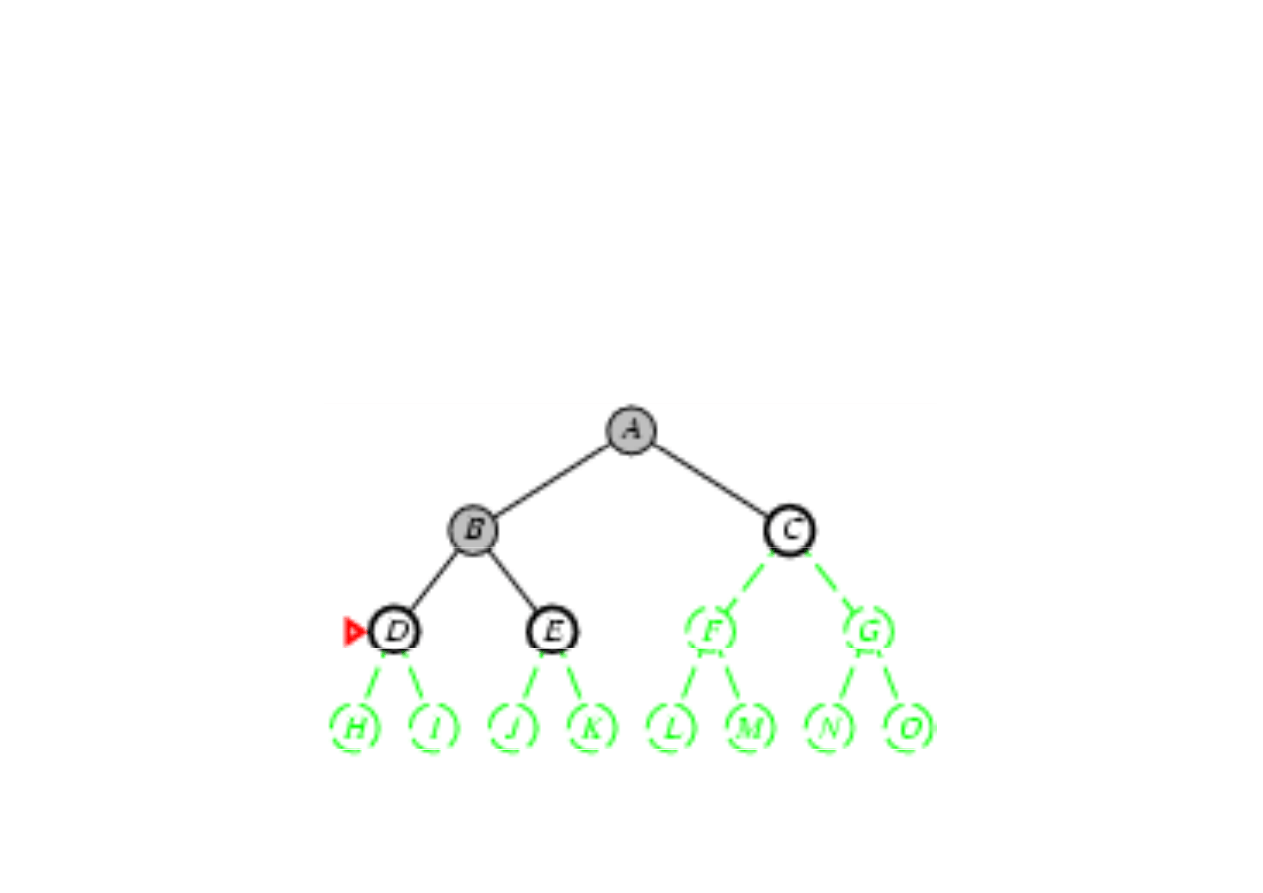
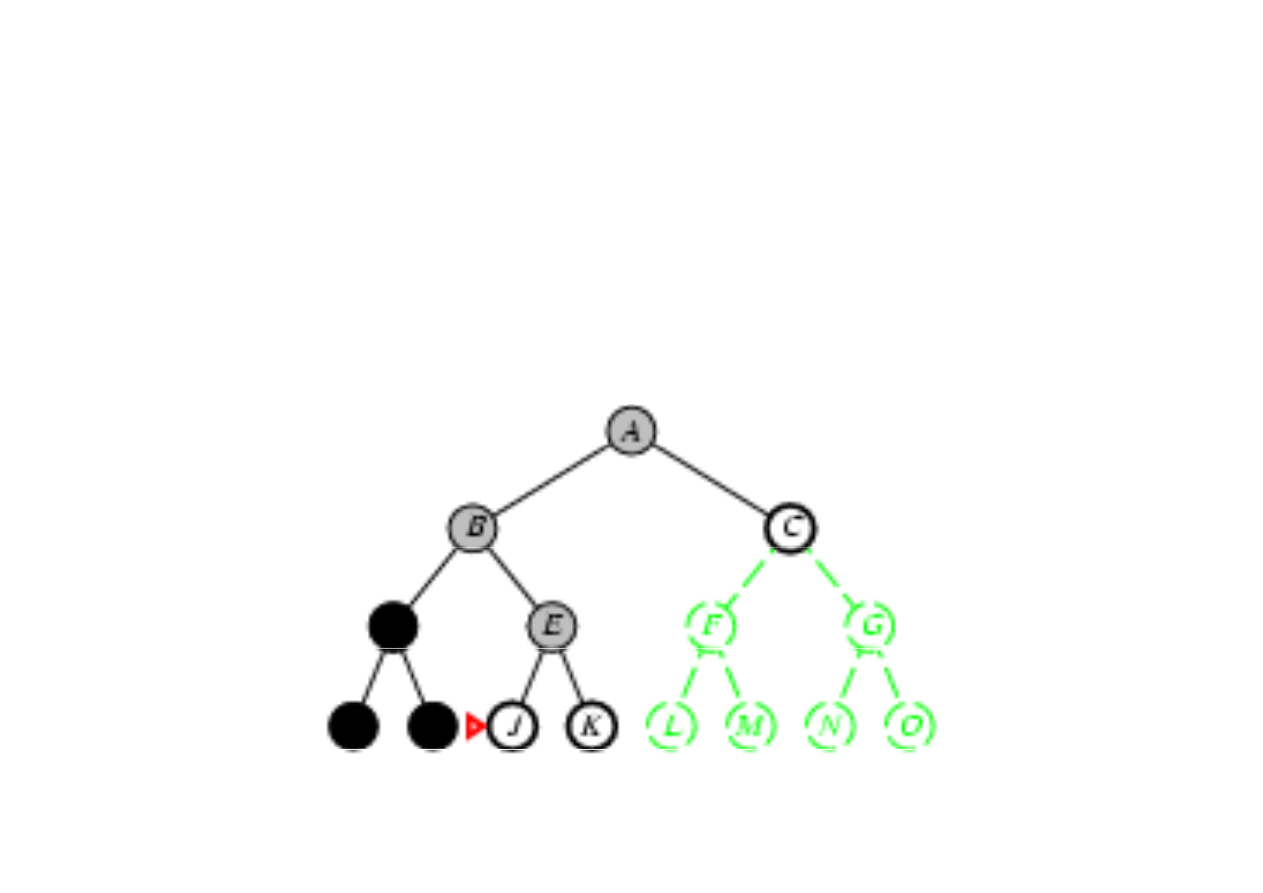
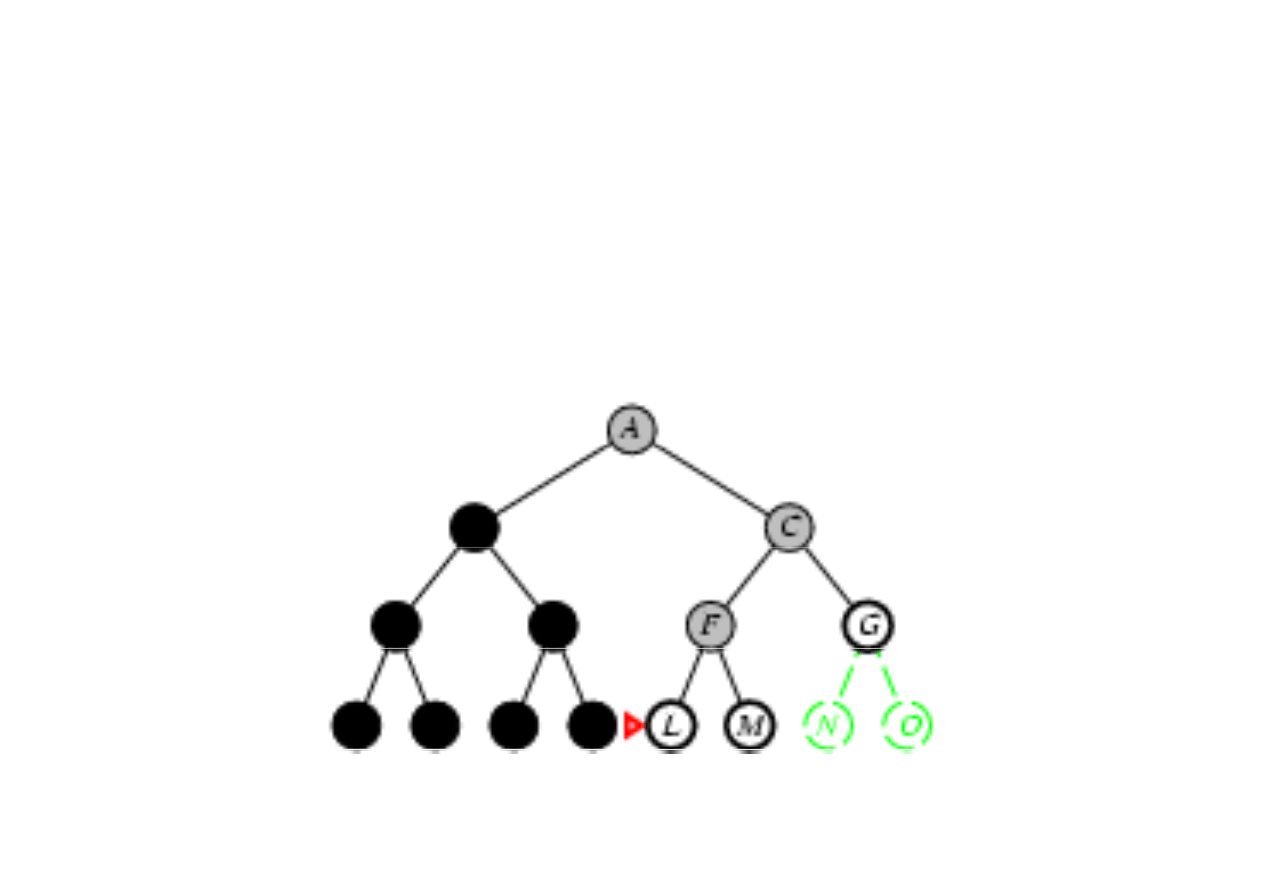
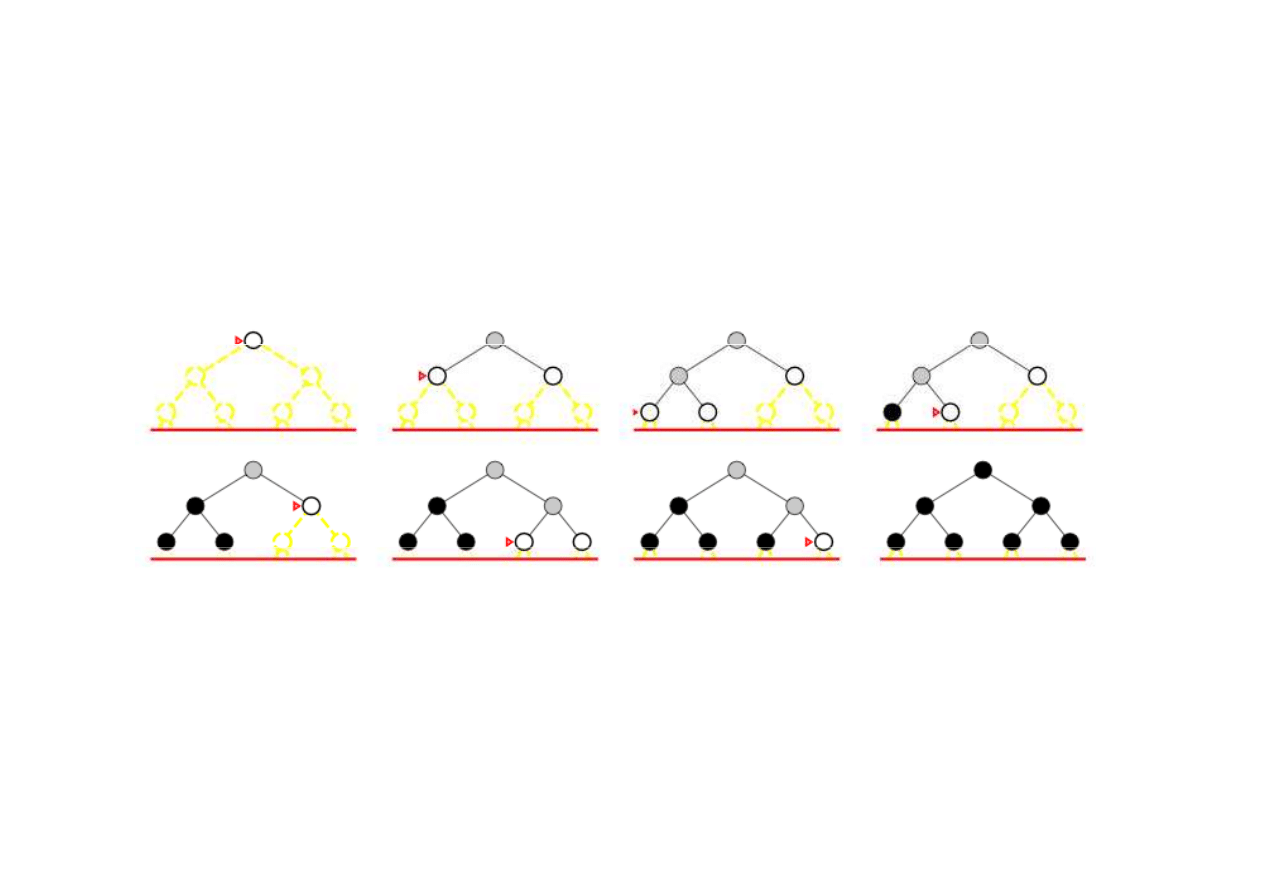
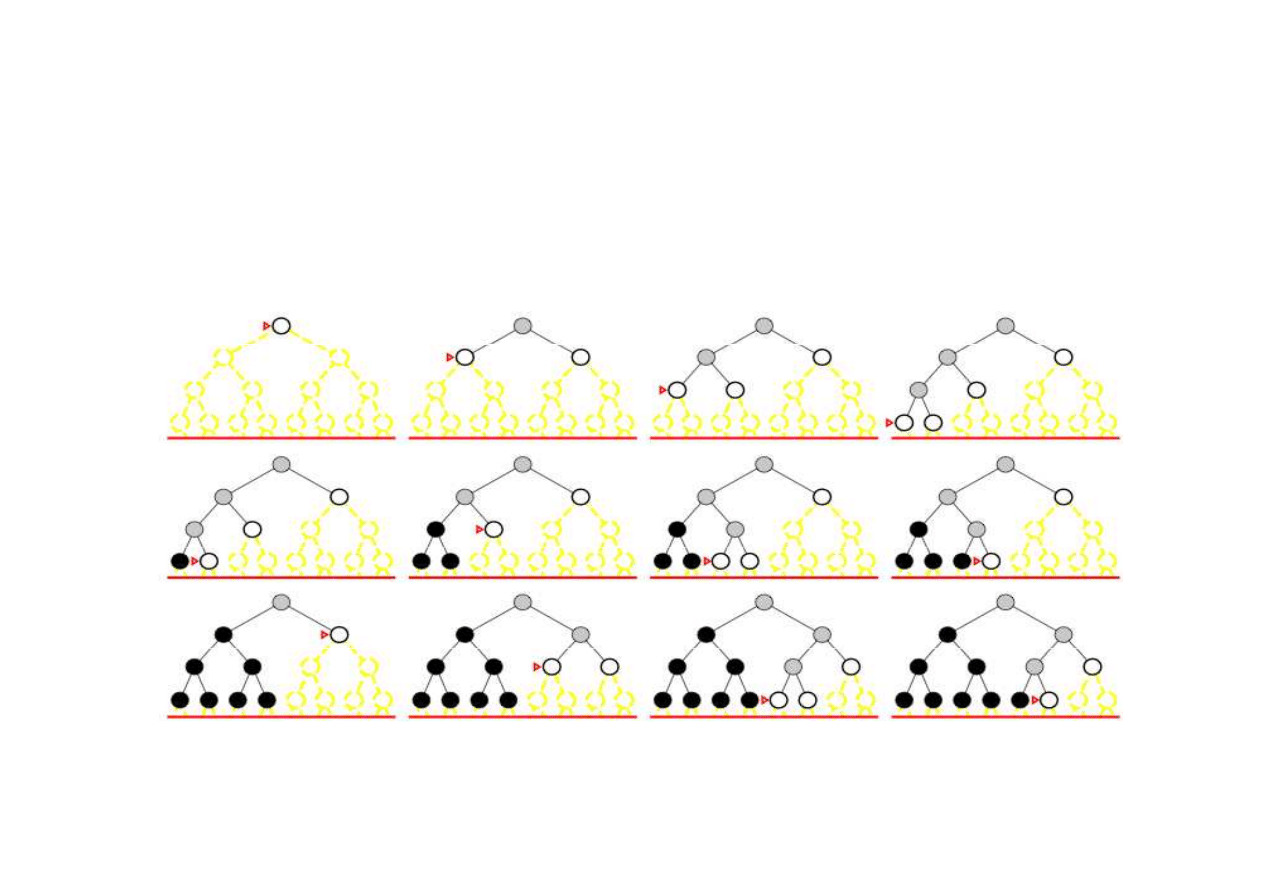
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
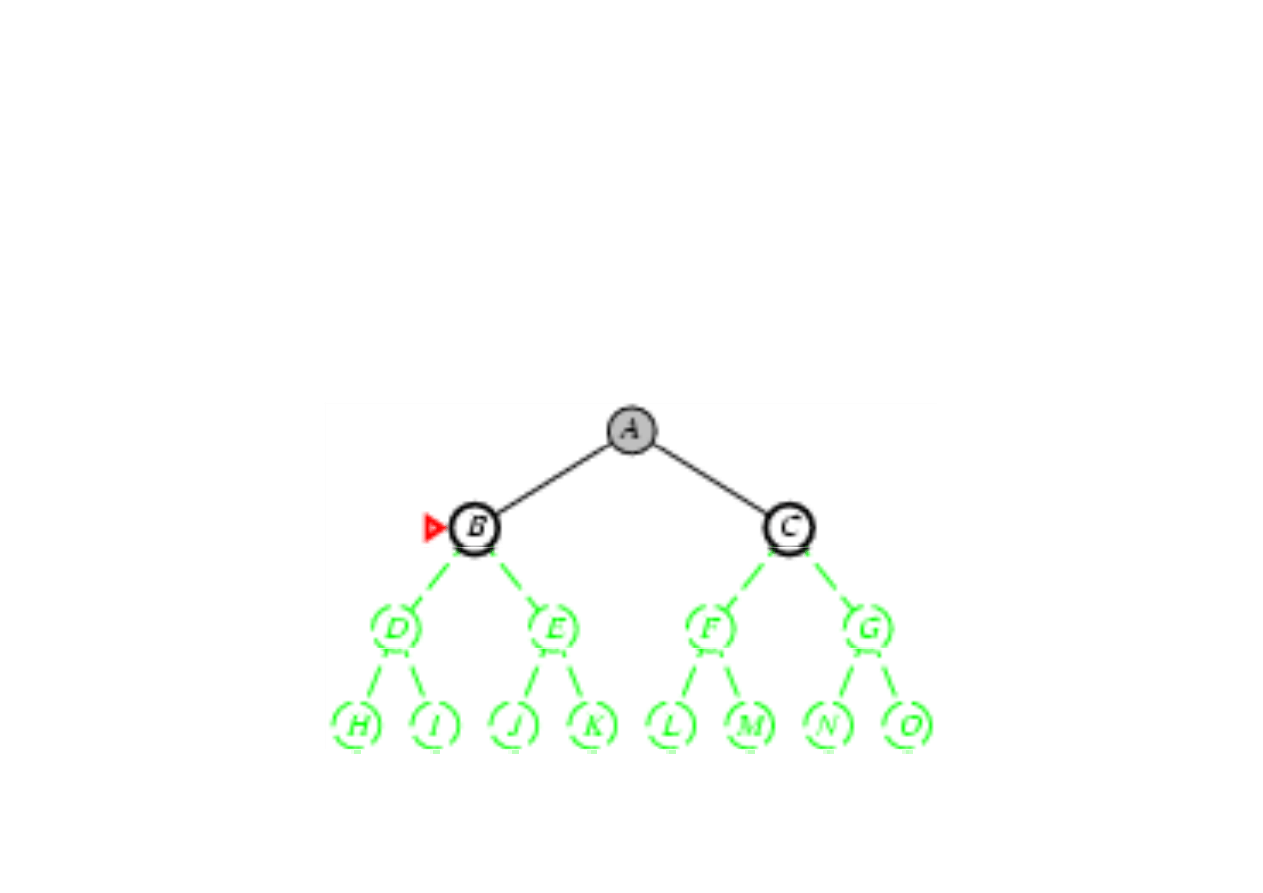
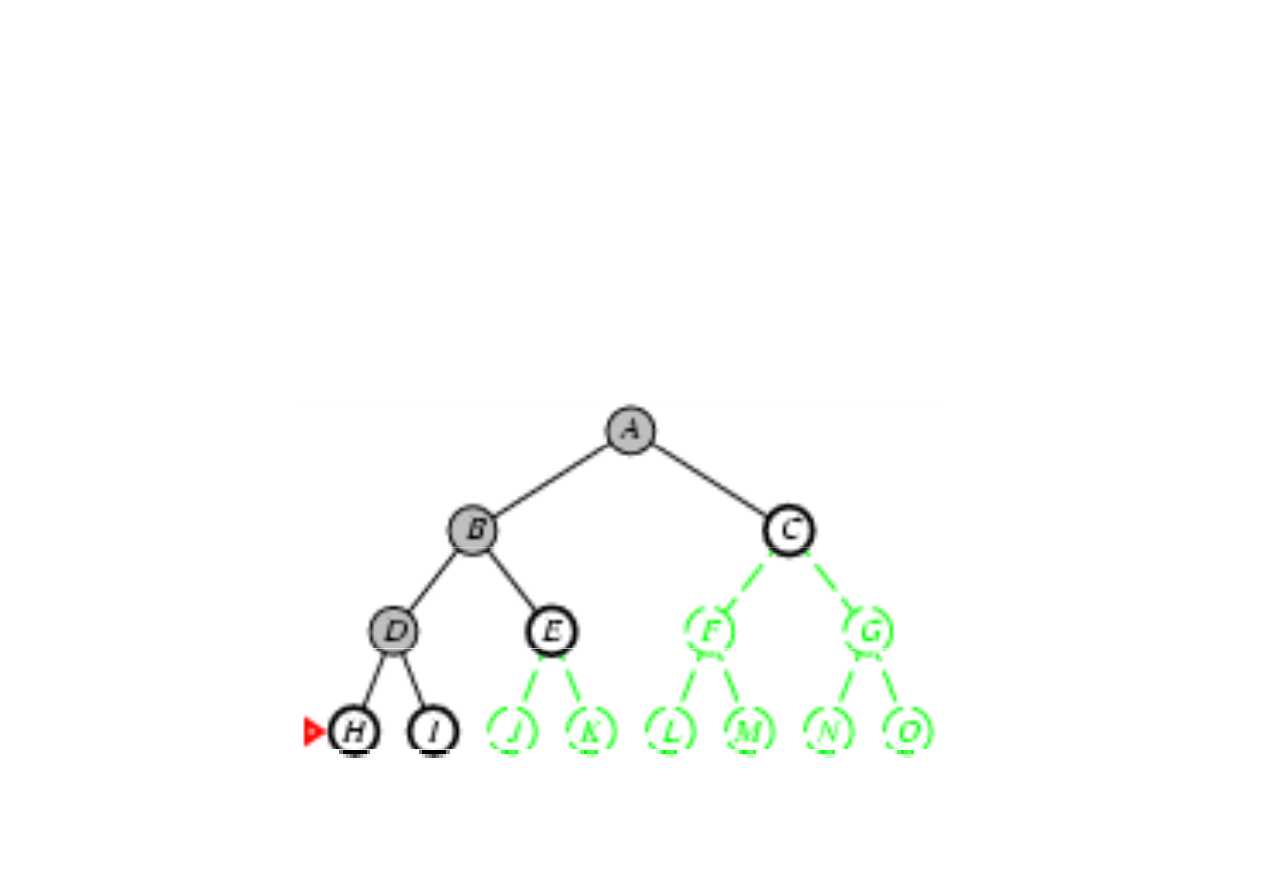
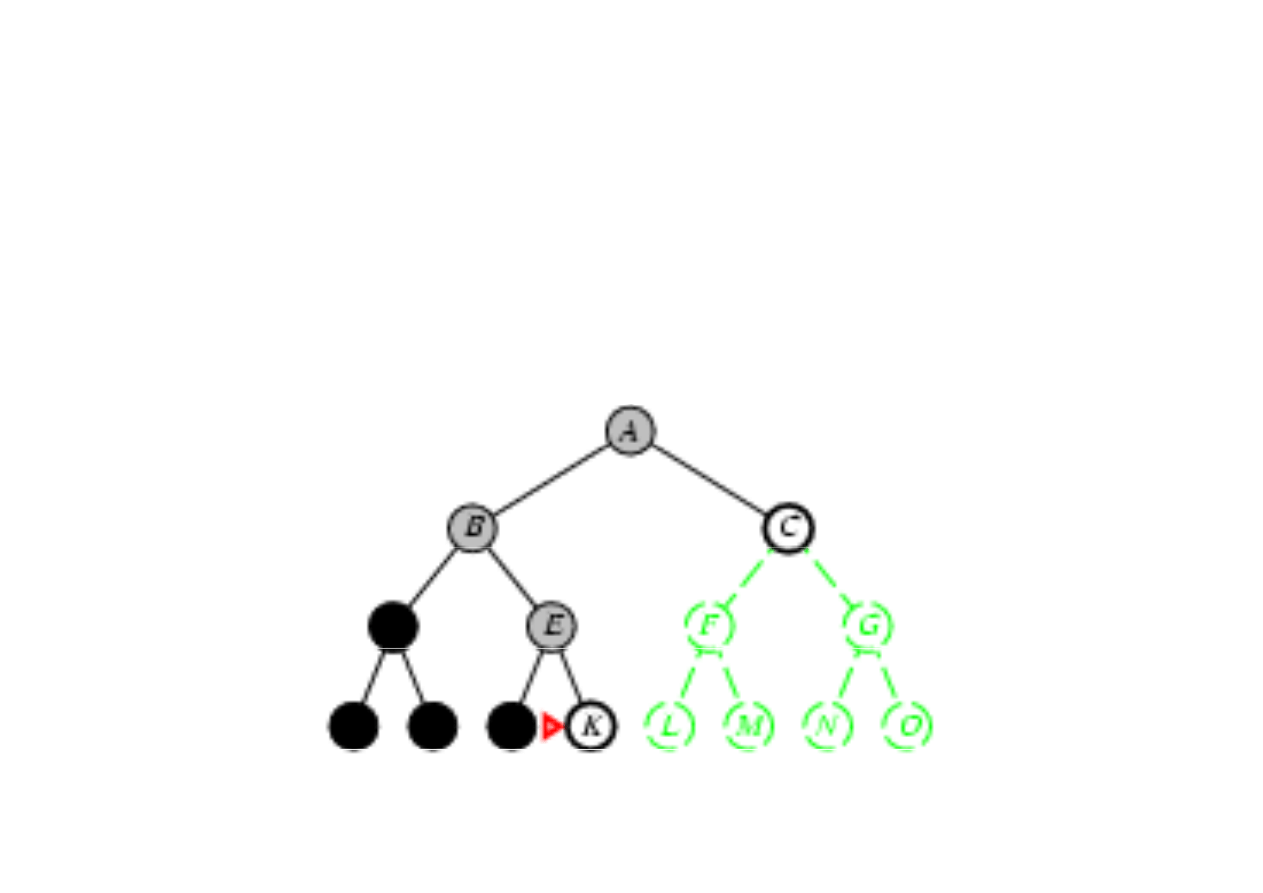
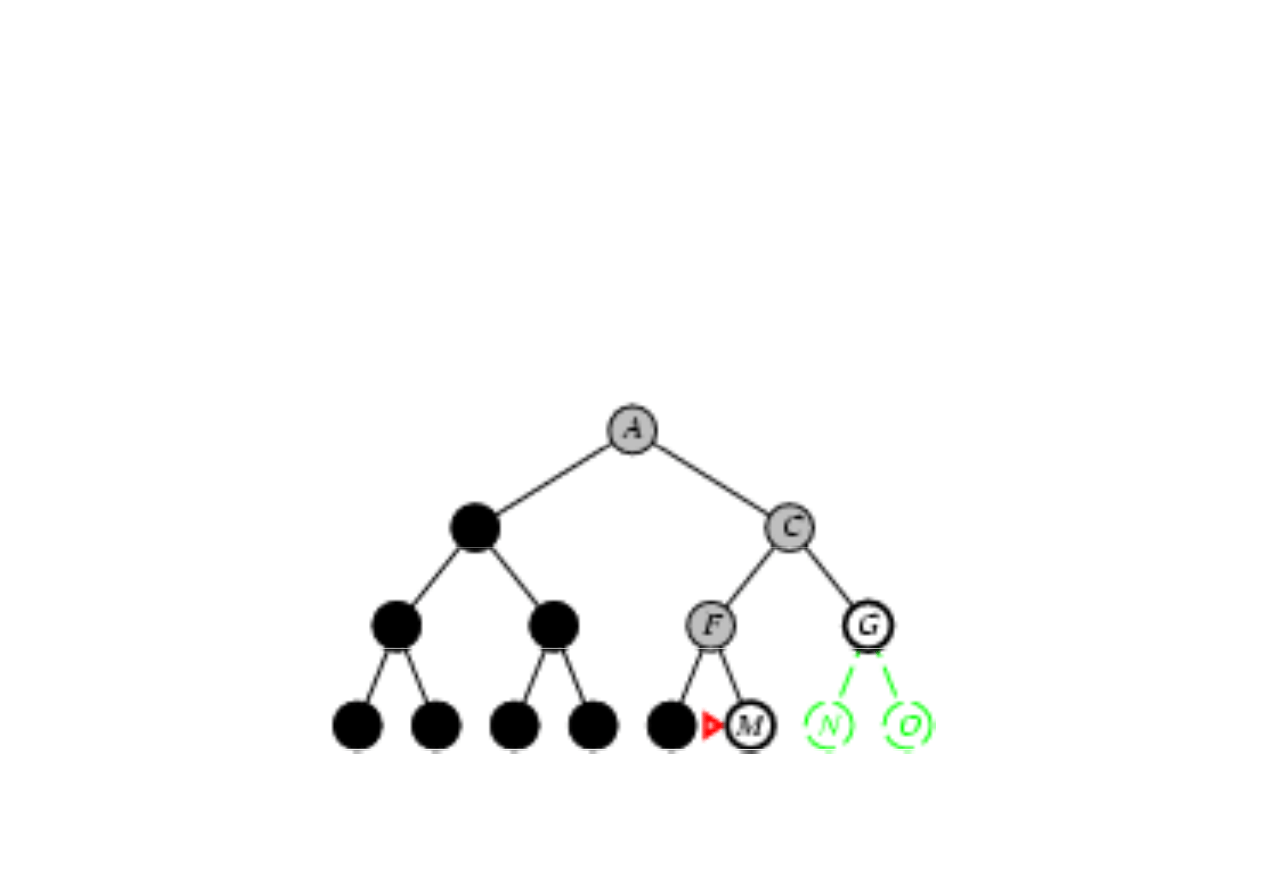
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
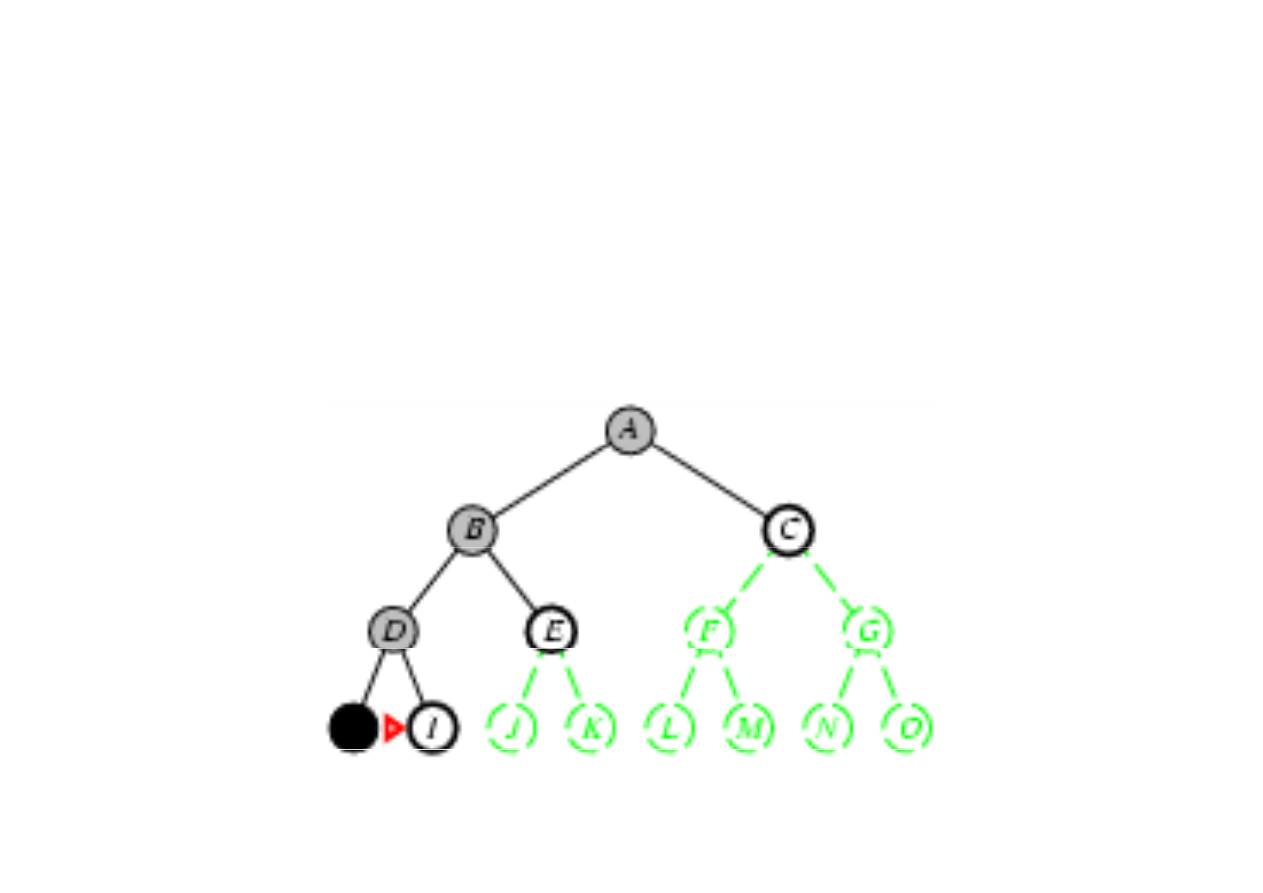
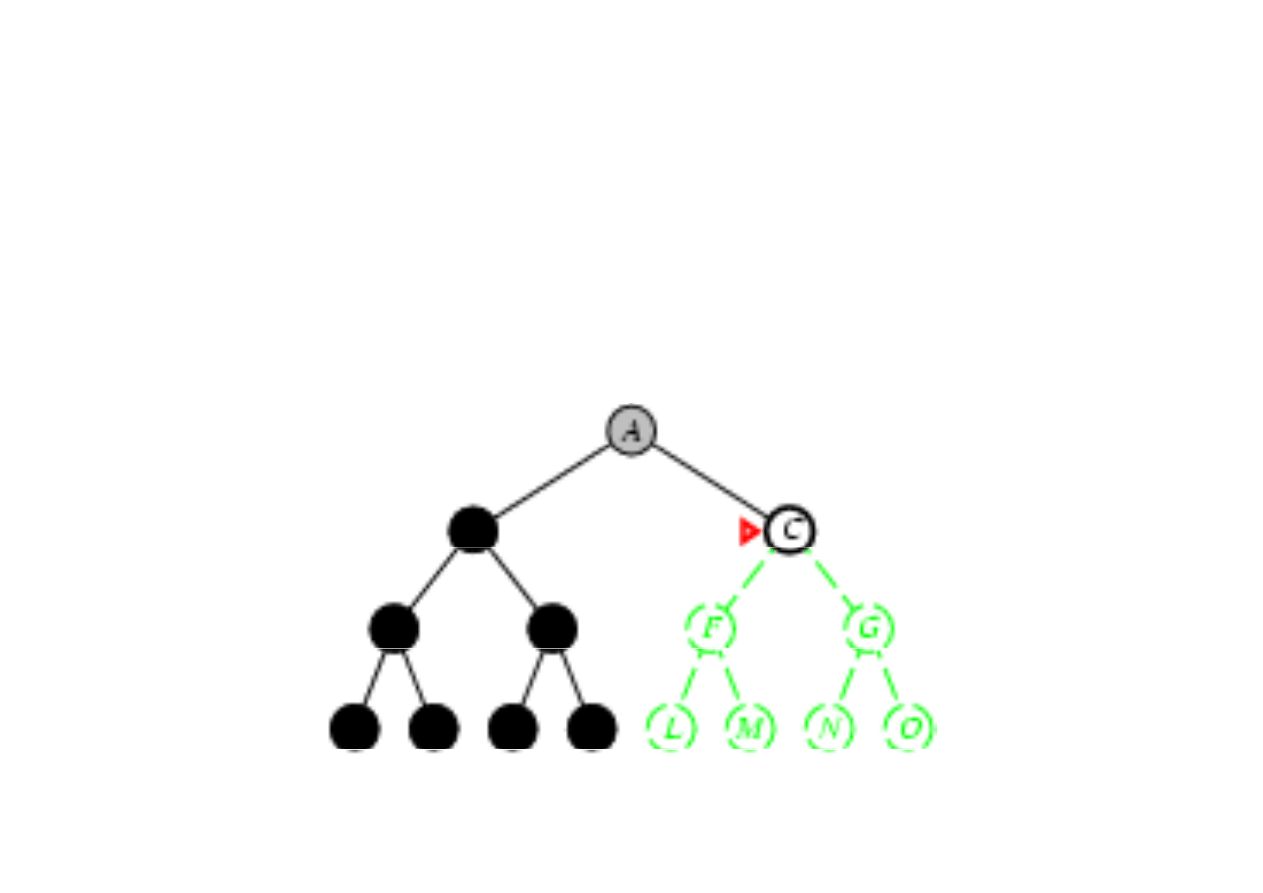
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
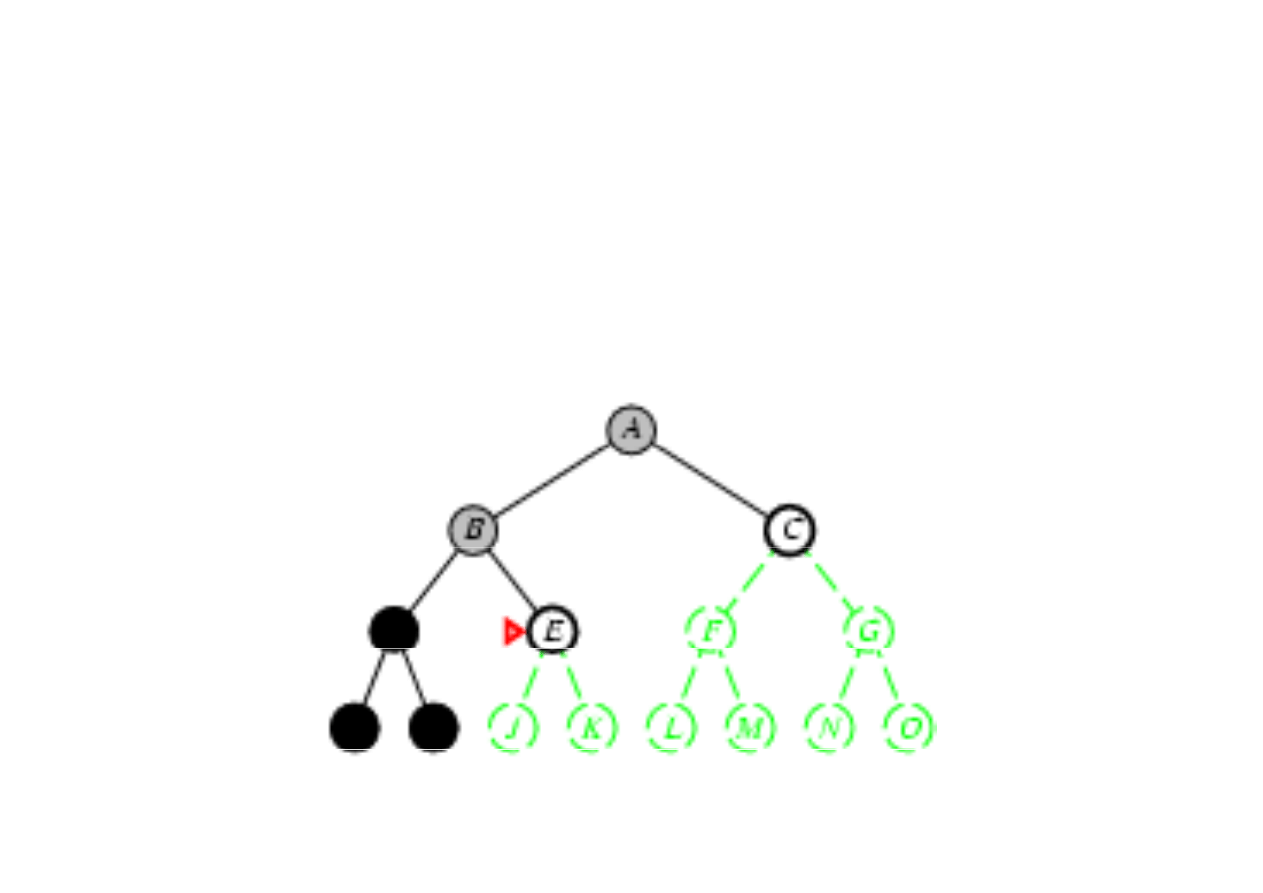
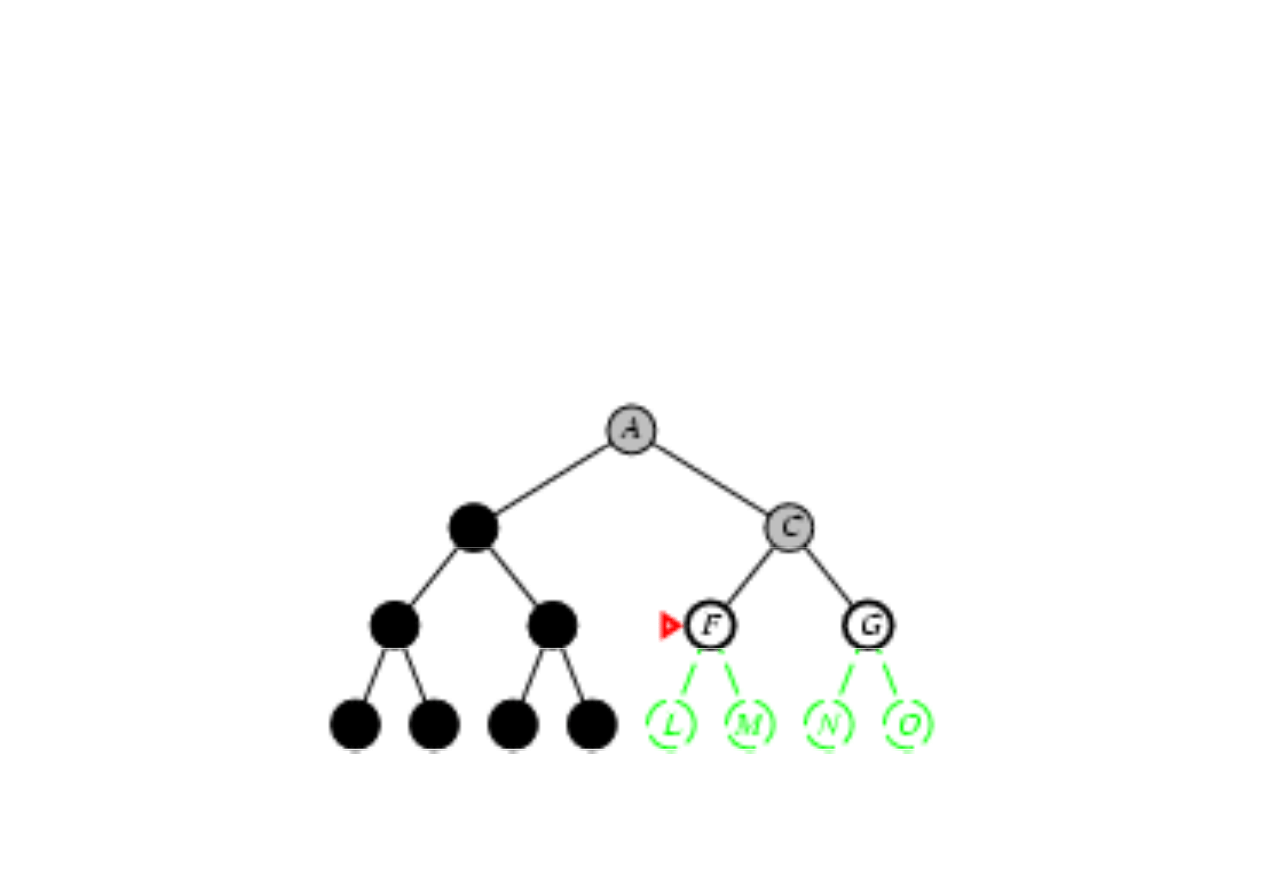
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007
Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Zasada: rozwin
ąć
najgł
ę
bszy nierozwini
ę
ty w
ę
zeł
(najgł
ę
bszy na brzegu).
Brzeg jest kolejk
ą
LIFO, tzn. nowy w
ę
zeł wstawiany jest na
pocz
ą
tek kolejki.
© F.A. Dul 2007

Poszukiwanie w gł
ą
b (depth-first search)
3.4. Algorytmy przeszukiwania drzew
Własno
ś
ci algorytmu
• Zupełno
ść
Tak w przestrzeniach sko
ń
czonych.
• Zupełno
ść
Tak w przestrzeniach sko
ń
czonych.
Nie w przestrzeniach niesko
ń
czonych,
z p
ę
tlami; (wymaga wtedy modyfikacji
w celu unikni
ę
cia powtarzaj
ą
cych si
ę
w celu unikni
ę
cia powtarzaj
ą
cych si
ę
stanów)
• Czas
O(b
m
) - ogromny je
ż
eli m >> d;
• Czas
O(b ) - ogromny je
ż
eli m >> d;
• Pami
ęć
O(bm) - liniowa wzgl
ę
dem pami
ę
ci;
• Optymalno
ść
Nie
© F.A. Dul 2007
Poszukiwanie z jednostajnym kosztem (uniform cost
3.4. Algorytmy przeszukiwania drzew
search)
Zasada: rozwin
ąć
najta
ń
szy nierozwini
ę
ty w
ę
zeł.
Własno
ś
ci algorytmu
Brzeg jest kolejk
ą
uporz
ą
dkowan
ą
według rosn
ą
cego kosztu.
• Zupełno
ść
Tak je
ż
eli koszt kroku >
ε
> 0.
• Czas
O(b
C/
ε
) - najgorszy przypadek,
C - koszt rozwi
ą
zania optymalnego;
C - koszt rozwi
ą
zania optymalnego;
• Pami
ęć
O(b
C/
ε
);
• Optymalno
ść
Tak - w
ę
zły s
ą
rozwijane według
• Optymalno
ść
Tak - w
ę
zły s
ą
rozwijane według
najwolniej rosn
ą
cego kosztu.
© F.A. Dul 2007
Poszukiwanie na ograniczon
ą
gł
ę
boko
ść
(depth
3.4. Algorytmy przeszukiwania drzew
limited search)
Zasada: jak w algorytmie poszukiwania wgł
ą
b ale z
gł
ę
boko
ś
ci
ą
ograniczon
ą
do poziomu
l
.
gł
ę
boko
ś
ci
ą
ograniczon
ą
do poziomu
l
.
Algorytm rozwi
ą
zuje problem niesko
ń
czonej
ś
cie
ż
ki.
Własno
ś
ci algorytmu
• Zupełno
ść
Tak je
ż
eli l
≥
d.
• Zupełno
ść
Tak je
ż
eli l
≥
d.
• Czas
O(b
l
);
• Pami
ęć
O(bl);
• Pami
ęć
O(bl);
• Optymalno
ść
Tak je
ż
eli l
≤
d.
© F.A. Dul 2007
Poszukiwanie pogł
ę
biane iteracyjnie (iterative deepe-
3.4. Algorytmy przeszukiwania drzew
ning search)
Zasada: wyznacz
ć
iteracyjnie najlepsz
ą
gł
ę
boko
ść
l
.
l = 0
© F.A. Dul 2007
Poszukiwanie pogł
ę
biane iteracyjnie (iterative deepe-
3.4. Algorytmy przeszukiwania drzew
ning search)
Zasada: wyznacz
ć
iteracyjnie najlepsz
ą
gł
ę
boko
ść
l
.
l = 1
© F.A. Dul 2007
Poszukiwanie pogł
ę
biane iteracyjnie (iterative deepe-
3.4. Algorytmy przeszukiwania drzew
ning search)
Zasada: wyznacz
ć
iteracyjnie najlepsz
ą
gł
ę
boko
ść
l
.
l = 2
© F.A. Dul 2007
Poszukiwanie pogł
ę
biane iteracyjnie (iterative deepe-
3.4. Algorytmy przeszukiwania drzew
ning search)
Zasada: wyznacz
ć
iteracyjnie najlepsz
ą
gł
ę
boko
ść
l
.
l = 3
© F.A. Dul 2007
Poszukiwanie pogł
ę
biane iteracyjnie (iterative deepe-
3.4. Algorytmy przeszukiwania drzew
ning search)
Cel jest osi
ą
gni
ę
ty na gł
ę
boko
ś
ci d odpowiadaj
ą
cej
najpłytszemu w
ę
złowi docelowemu.
najpłytszemu w
ę
złowi docelowemu.
Algorytm ł
ą
czy zalety algorytmów poszukiwania wszerz
i w gł
ą
b.
Własno
ś
ci algorytmu
i w gł
ą
b.
• Zupełno
ść
Tak.
• Zupełno
ść
Tak.
• Czas
O(b
d
);
• Pami
ęć
O(bd);
• Pami
ęć
O(bd);
• Optymalno
ść
Tak je
ż
eli koszt kroku jest stały.
© F.A. Dul 2007
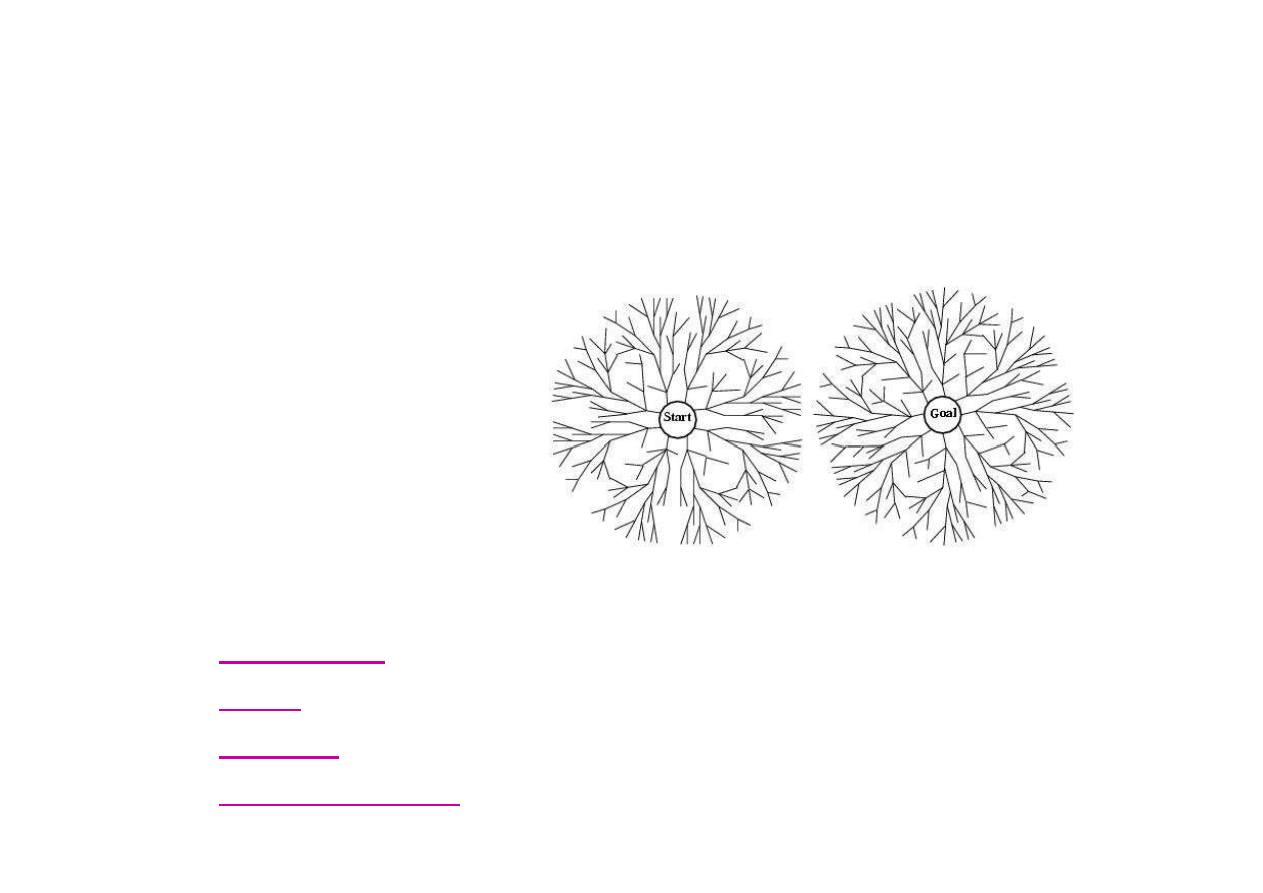
Poszukiwanie dwukierunkowe (bidrectional search)
3.4. Algorytmy przeszukiwania drzew
Zasada: jednoczesne poszukiwanie z pocz
ą
tku i ko
ń
ca;
Nale
ż
y sprawdz
ć
przed rozwini
ę
ciem czy w
ę
zły nale
żą
Nale
ż
y sprawdz
ć
przed rozwini
ę
ciem czy w
ę
zły nale
żą
do drugiego brzegu.
d
d
d
b
b
b
<
+
2
/
2
/
Własno
ś
ci algorytmu
• Zupełno
ść
Tak je
ż
eli oba poszukiwania wszerz.
• Zupełno
ść
Tak je
ż
eli oba poszukiwania wszerz.
• Czas
O(b
d/2
);
• Pami
ęć
O(b
d/2
);
© F.A. Dul 2007
• Pami
ęć
O(b
);
• Optymalno
ść
Tak je
ż
eli oba poszukiwania wszerz.
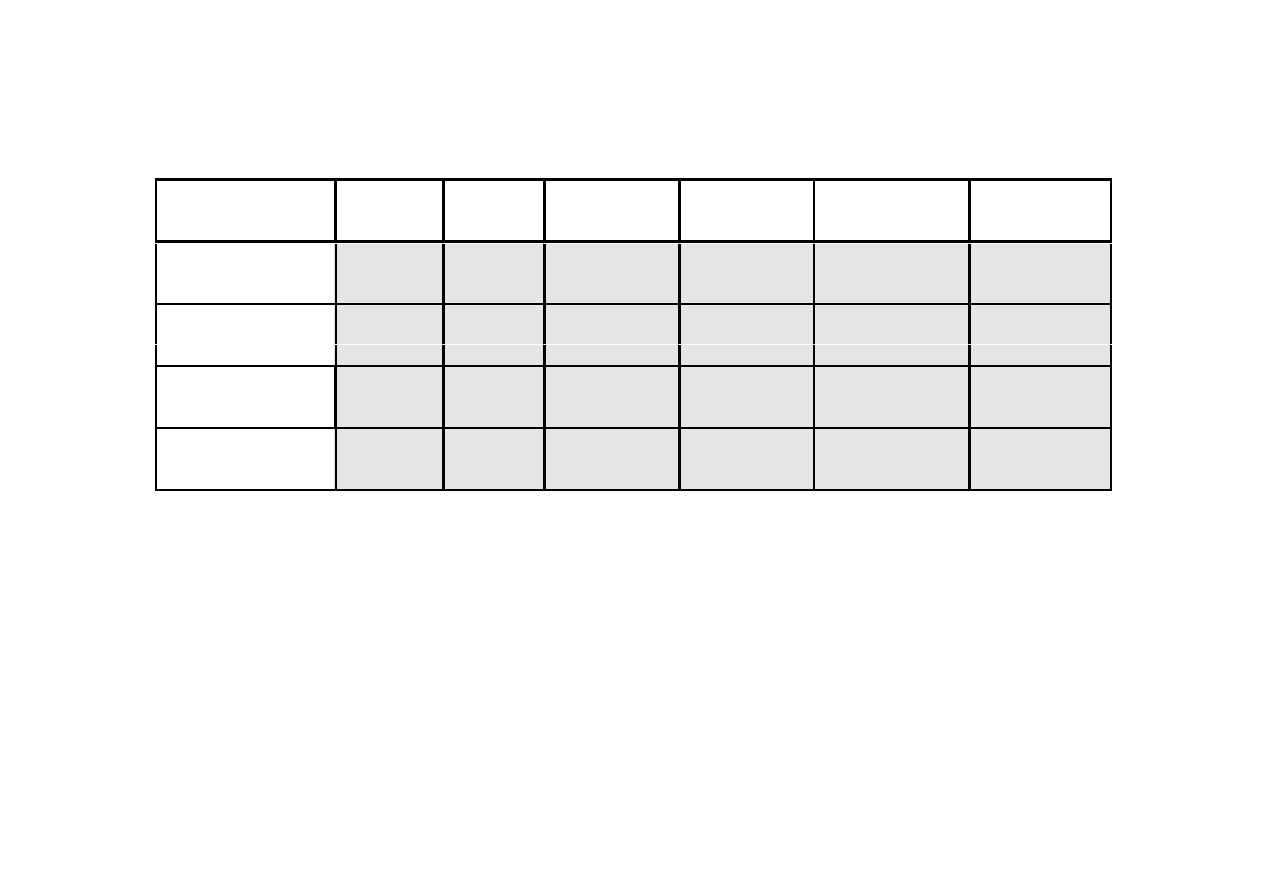
Porównanie algorytmów przeszukiwania
3.4. Algorytmy przeszukiwania drzew
Kryterium
Wszerz
W gł
ą
b
Koszt
jednordny
Stała
gł
ę
boko
ść
Pogł
ę
bianie
iteracyjne
Dwukie-
runkowe
Zupełno
ść
TAK
NIE
TAK
TAK (l
≥≥≥≥
d)
TAK
TAK
Czas
O(b
d+1
)
O(b
m
)
O(b
C/
εεεε
)
O(b
l
)
O(b
d
)
O(b
d/2
)
Czas
O(b
)
O(b )
O(b
)
O(b )
O(b )
O(b
)
Pami
ęć
O(b
d+1
)
O(bm)
O(b
C/
εεεε
)
O(bl)
O(bd)
O(b
d/2
)
Optymalno
ść
TAK
NIE
TAK
TAK (l
≤≤≤≤
d)
TAK
TAK
© F.A. Dul 2007

3.4. Algorytmy przeszukiwania drzew
Najwi
ę
ksz
ą
wad
ą
poszukiwa
ń
Najwi
ę
ksz
ą
wad
ą
poszukiwa
ń
nieinformowanych jest wykładniczy
wzrost kosztu oblicze
ń
.
wzrost kosztu oblicze
ń
.
Krytyczna jest zwłaszcza ilo
ść
Krytyczna jest zwłaszcza ilo
ść
wymaganej pami
ę
ci, gdy
ż
mo
ż
e ona
by
ć
gigantyczna nawet dla zada
ń
by
ć
gigantyczna nawet dla zada
ń
o umiarkowanych wymiarach.
o umiarkowanych wymiarach.
© F.A. Dul 2007
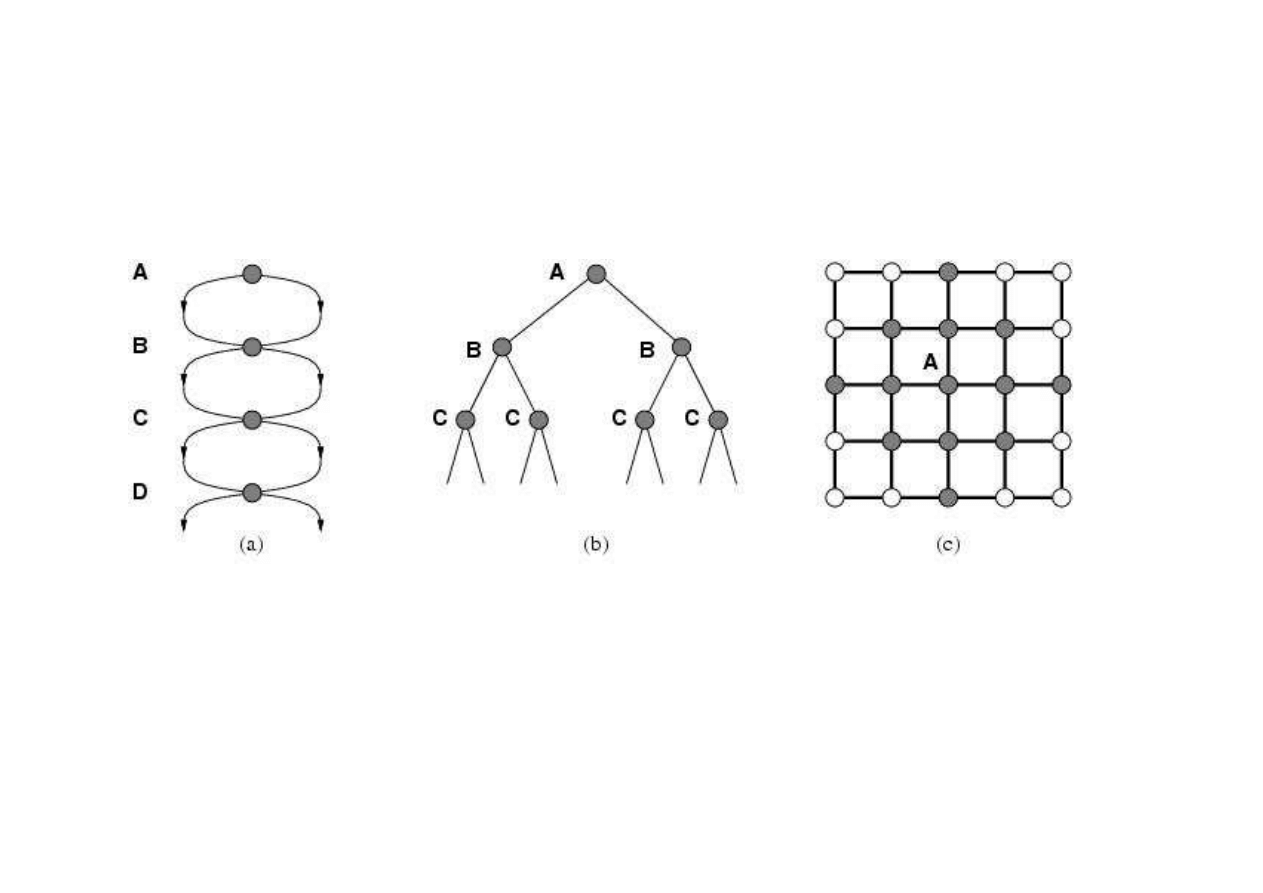
Problem powtarzaj
ą
cych si
ę
stanów
3.4. Algorytmy przeszukiwania drzew
Je
ż
eli powtarzaj
ą
ce si
ę
stany nie s
ą
wykrywane, to zadanie
rozwi
ą
zywalne mo
ż
e zmieni
ć
si
ę
w nierozwi
ą
zywalne.
(a) zbiór stanów które mog
ą
by
ć
osi
ą
gane dwiema drogami,
(b) drzewo binarne dla zbioru stanów A, B, C, D...
(b) drzewo binarne dla zbioru stanów A, B, C, D...
Ka
ż
dy stan mo
ż
e by
ć
osi
ą
gni
ę
ty kosztem liniowym,
za
ś
koszt przeszukiwania drzewa jest wykładniczy.
© F.A. Dul 2007
za
ś
koszt przeszukiwania drzewa jest wykładniczy.
(c) stan A mo
ż
e by
ć
osi
ą
gany wieloma ró
ż
nymi drogami.
3.5. Przeszukiwanie grafu (graph search)
Zasada: lista zamkni
ę
ta zawiera wszystkie rozwini
ę
te w
ę
zły.
function GRAPH-SEARCH(problem,fringe) return a solution or failure
closed
←
an empty set
closed
←
an empty set
fringe
←
INSERT(MAKE-NODE(INITIAL-STATE[problem]), fringe)
loop do
if EMPTY?(fringe) then return failure
if EMPTY?(fringe) then return failure
node
←
REMOVE-FIRST(fringe)
if GOAL-TEST[problem] applied to STATE[node] succeeds
then return SOLUTION(node)
then return SOLUTION(node)
if STATE[node] is not in closed then
add STATE[node] to closed
fringe
←
INSERT-ALL(EXPAND(node, problem), fringe)
Własno
ś
ci algorytmu
• Zupełno
ść
Tak
fringe
←
INSERT-ALL(EXPAND(node, problem), fringe)
• Zupełno
ść
Tak
• Czas
~ wymiaru przestrzeni stanu, << O(b
d
);
• Pami
ęć
~ wymiaru przestrzeni stanu, << O(b
d
)
© F.A. Dul 2007
• Pami
ęć
~ wymiaru przestrzeni stanu, << O(b )
• Optymalno
ść
Tak je
ż
eli poszukiwania wszerz.

Poszukiwanie w przypadku niepełnej informacji
3.5. Algorytmy przeszukiwania grafów
Zało
ż
enia idealne:
-
ś
rodowisko jest całkowicie obserwowalne,
-
ś
rodowisko jest deterministyczne,
-
ś
rodowisko jest deterministyczne,
- agent zna efekty swojego działania.
Co si
ę
stanie, gdy agent nie ma pełnej informacji
Co si
ę
stanie, gdy agent nie ma pełnej informacji
o stanie lub efektach działania?
• Nieobserwowalne
⇒
⇒
⇒
⇒
zadanie bez czujników (conformant
problem)
– agent nie wie, gdzie jest; rozwi
ą
zanie jest ci
ą
giem stanów;
• Niedeterministyczne lub obserwowalne cz
ęś
ciowo
⇒
⇒
⇒
⇒
nieprzewidywalne
(contingency problem)
⇒
⇒
⇒
⇒
nieprzewidywalne
(contingency problem)
– obserwacje dostarczaj
ą
nowych
informacji o stanie bie
żą
cym,
– poszukiwania cz
ę
sto
przeplataj
ą
si
ę
z działaniami.
© F.A. Dul 2007
• Nieznana przestrze
ń
stanów
⇒
⇒
⇒
⇒
exploration problem
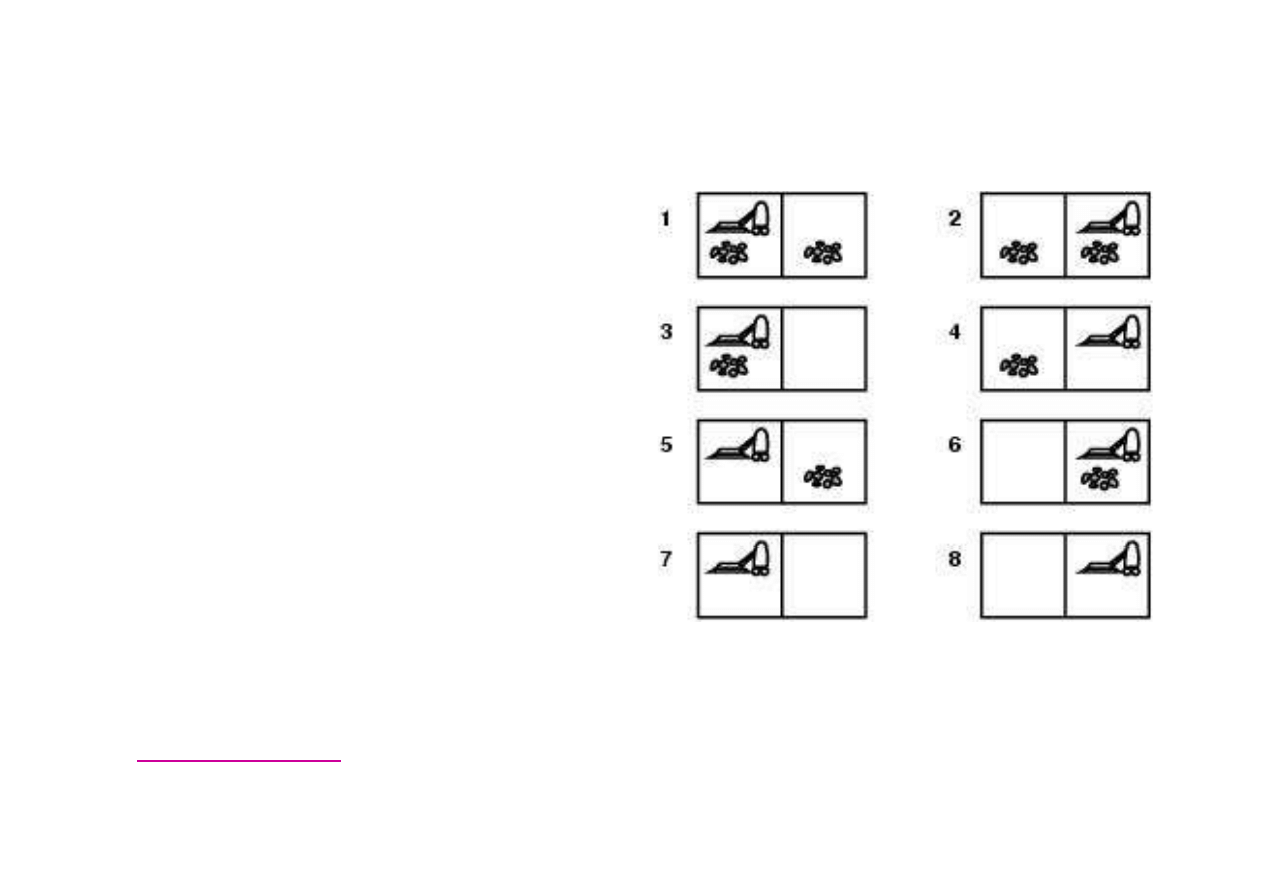
Zadanie nieobserwowalne (conformant problem)
3.5. Algorytmy przeszukiwania grafów
Start z dowolnego stanu spo
ś
ród
{1,2,3,4,5,6,7,8}
{1,2,3,4,5,6,7,8}
W PRAWO
→
{2,4,6,8}
Rozwi
ą
zanie
[ W PRAWO , ODKURZAJ ,
W LEWO , ODKURZAJ ]
Je
ż
eli
ś
wiat nie jest całkowicie obserwowalny, to stan
wiarygodny (belief state) jest zbiorem stanów, które
mog
ą
by
ć
osi
ą
gni
ę
te.
© F.A. Dul 2007
mog
ą
by
ć
osi
ą
gni
ę
te.
Zadanie nieobserwowalne (conformant problem)
3.5. Algorytmy przeszukiwania grafów
Rozwi
ą
zanie problemu - stan wiarygodny zawieraj
ą
cy
wszystkie mo
ż
liwe stany docelowe.
© F.A. Dul 2007
Zadanie niedeterministyczne lub obserwowalne
cz
ęś
ciowo (contingency problem)
3.5. Algorytmy przeszukiwania grafów
cz
ęś
ciowo (contingency problem)
Obserwowalno
ść
lokalna: start
z jednego ze stanów {1,3}.
z jednego ze stanów {1,3}.
Prawo Murphy’ego
:
odkurzanie czystego dywanu
mo
ż
e go zabrudzi
ć
.
mo
ż
e go zabrudzi
ć
.
Obserwacja lokalna:
zabrudzenie tylko w miejscu
pobytu agenta.
pobytu agenta.
- obserwacja: [L,
Ś
MIECI] = {1,3},
- [ODKURZAJ] = {5,7},
- [W PRAWO] = {6,8},
- [W PRAWO] = {6,8},
- [ODKURZAJ] w {6} = {8}, OK
- [ODKURZAJ] w {8} =
Ź
LE!
Rozwi
ą
zanie
Ż
aden bezwarunkowy ci
ą
g działa
ń
nie gwarantuje powodzenia.
Nale
ż
y uzale
ż
ni
ć
działania od aktualnej sytuacji.
© F.A. Dul 2007
Rozwi
ą
zanie
[ ODKURZAJ, W PRAWO, je
ż
eli
Ś
MIECI to ODKURZAJ ]

Podsumowanie
• Rozwi
ą
zywanie zada
ń
poprzez przeszukiwanie wymaga
• Rozwi
ą
zywanie zada
ń
poprzez przeszukiwanie wymaga
sformułowania zadania w postaci abstrakcyjnej.
• Je
ż
eli zadanie jest deterministyczne i obserwowalne
• Je
ż
eli zadanie jest deterministyczne i obserwowalne
(jednostanowe), to do jego rozwi
ą
zania mo
ż
na u
ż
y
ć
algorytmu poszukiwania nieinformowanego.
• Istnieje wiele algorytmów poszukiwania nieinformowanego:
• Istnieje wiele algorytmów poszukiwania nieinformowanego:
wszerz, w gł
ą
b, kosztu jednorodnego, stałej gł
ę
boko
ś
ci,
pogł
ę
biania iteracyjnego oraz poszukiwa
ń
dwukierunkowych.
• Algorytm poszukiwania poprzez pogł
ę
bianie iteracyjne jest
najlepszym algorytmem ogólnym - wymaga liniowej pami
ę
ci
a czas oblicze
ń
jest niewiele wi
ę
kszy ni
ż
w przypadku innych
a czas oblicze
ń
jest niewiele wi
ę
kszy ni
ż
w przypadku innych
algorytmów.
• Agenci działaj
ą
cy na zasadzie poszukiwania rozwi
ą
zania
s
ą
u
ż
ywani w wielu dziedzinach: wyznaczaniu drogi,
s
ą
u
ż
ywani w wielu dziedzinach: wyznaczaniu drogi,
planowaniu układów VLSI, nawigacji robotów, poszukiwa
ń
internetowych;
© F.A. Dul 2007
Wyszukiwarka
Podobne podstrony:
04 Osiaganie celu poprzez poszu Nieznany (2)
03 przekroj podluzny i poprzeczny PROJEKTOWY
1975 12 Rakiety nie osiągają celu
03 przekroj podluzny i poprzeczny PROJEKTOWY
Historia Ryzykownej Techniki Osiagania Celu
03 POSZUKIWANIE OSOB UKRYWAJACYC SIE PRZED ORGANAMI SCIGANIA
Osiąganie celów strategicznych organizacji poprzez zarządzanie portfelem projektów
Zad 3 - Bilans osobisty z określeniem celu zawodowego, Studia, Semestry, semestr IV, WUP-aktywne met
Zad 3 - Bilans osobisty z określeniem celu zawodowego, Studia, Semestry, semestr IV, WUP-aktywne met
po co żyję, W poszukiwaniu utraconej mocy, W poszukiwaniu utraconej mocy / 03 marzec 2008
choroby zakaźne i nieinfekcyjne choroby cywilizacyjne 8 03
Zadanie 4 - Projekt realizacji celu, Studia, Semestry, semestr IV, WUP-aktywne metody poszukiwania p
03 ĆWICZENIA NA ROZGRZEWKĘ , W tej lekcji chciałabym przedstawić Ci kilka prostych i bezpiecznych ćw
03 PRZEKRÓJ POPRZECZNY A A
03 POSZUKIWANIE OSOB UKRYWAJACYC SIE PRZED ORGANAMI SCIGANIA
Ahern Jerry Krucjata 03 Poszukiwanie
Ahern Jerry Krucjata 03 Poszukiwanie
więcej podobnych podstron