Pracownia Technik Pomiarowych
1
ANALIZA SYGNAŁÓW LIDAROWYCH
Celem ćwiczenia jest zapoznanie się z budową i działaniem lidaru oraz sposobem
interpretacji, analizy sygnałów i wykorzystaniem uzyskanych danych pomiarowych.
Nazwa urządzenia pochodzi od angielskiego akronimu LIDAR, utworzonego od
wyrażenia: Light Detection and Ranging i oznacza wykrywanie i określanie położenia za
pomocą światła. Zasada działania lidaru jest podobna do zasady działania radaru: pomiar
polega na wysłaniu impulsu promieniowania i detekcji jego echa powstałego wskutek
rozpraszania na wykrywanych obiektach.
1. Budowa i działanie lidarów
1.1. Budowa lidarów
Podstawą działania wszystkich typów lidarów jest rozpraszanie światła wysyłanego
przez nadajnik lidaru (laser) na różnego rodzaju cząstkach w atmosferze (np. aerozol
atmosferyczny). Natężenie światła rozproszonego zależy od wielu parametrów, między
innymi od wielkości cząstek rozpraszających i długości fali. Analiza rejestrowanego przez
odbiornik lidaru promieniowania rozproszonego wstecz dostarcza informacji o atmosferze.
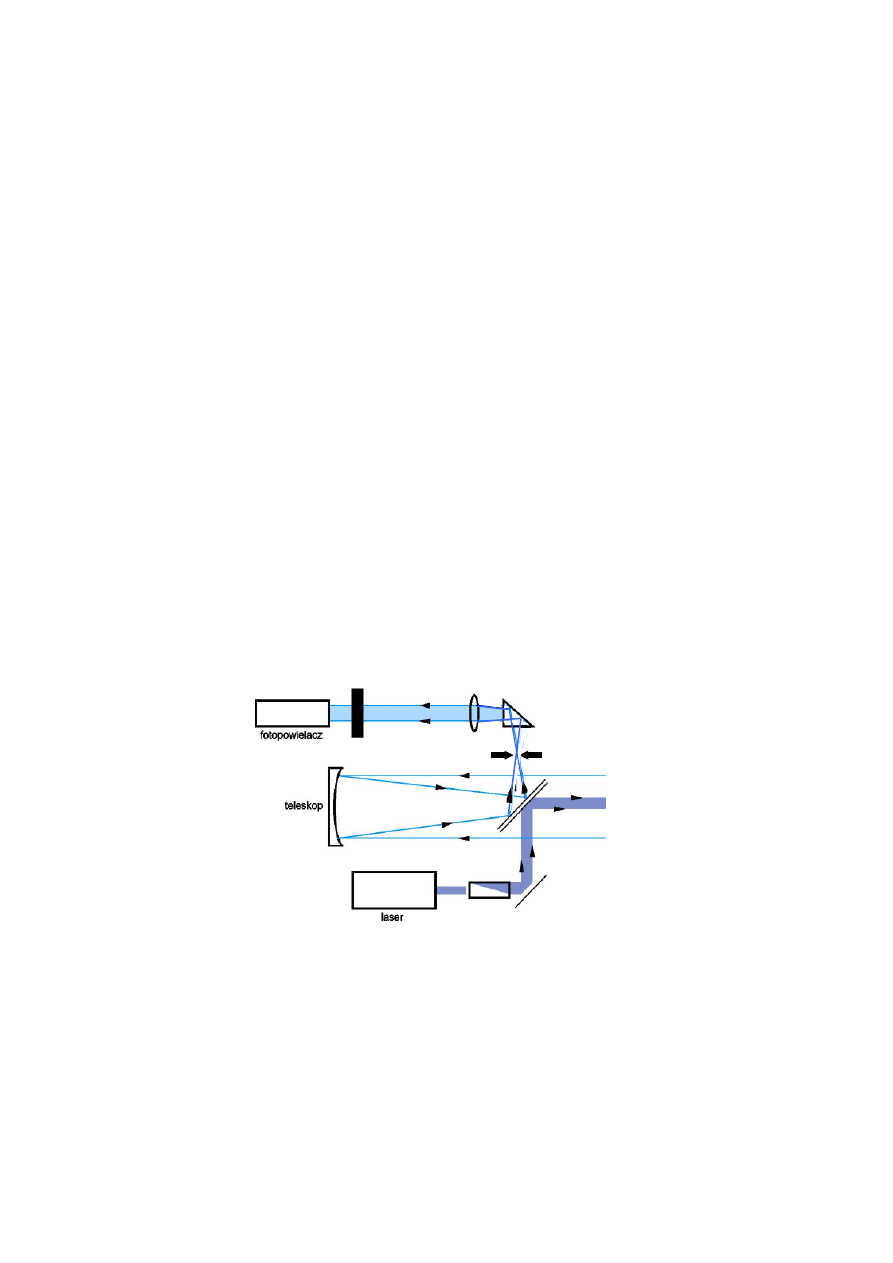
Rys. 1 Budowa lidaru (M-zwierciadła, P - przesłona irysowa, soczewka,
Na rys. 1. przedstawiono ogólny schemat budowy lidaru. Każdy lidar składa się z trzech
części:
z
nadajnika optycznego,
z
odbiornika optycznego,
z
układu akwizycji danych.
M
M
M
F
S
PW
P
M

Pracownia Technik Pomiarowych
2
W skład nadajnika wchodzi laser, który generuje krótkie impulsy światła, oraz złożony
ze zwierciadeł (M) układ nadawczy, który wysyła wiązkę laserową w atmosferę wzdłuż osi
teleskopu. W większości systemów stosuje się układy poszerzania wiązki lasera (PW), by
zmniejszyć jej rozbieżność dyfrakcyjną. Odbiornik stanowią teleskop i fotodetektor
(fotopowielacz), w których następuje rejestracja sygnału i przetworzenie go na postać
elektroniczną. W ognisku teleskopu zazwyczaj stosuje się przesłonę (P) o niewielkiej średnicy
otworu, by ograniczyć promieniowanie dochodzące do teleskopu z kierunków pozaosiowych.
Przed fotopowielaczem często umieszczona jest soczewka (S) ogniskująca rejestrowane
światło na fotodetektorze i filtr optyczny (F) o charakterystyce transmisji dobrze dopasowanej
do widma promieniowania emitowanego przez laser. Układ akwizycji danych, składający się
z oscyloskopu lub przetwornika A/D (analogowo – cyfrowego – analog to digital) i
komputera, odpowiada za zamianę sygnałów analogowych na postać cyfrową oraz jego zapis.
W dodatku do instrukcji znajduje się krótki opis zjawisk związanych z oddziaływaniem
światła z materią. W zależności od tego, które z nich odgrywa podstawową rolę, wyróżniamy
następujące typy lidarów:
z
rozproszeniowe (jedno- i wieloczęstotliwościowe) do badań aerozolu, zwane
też aerozolowymi lub Rayleighowskimi,
z
absorpcji różnicowej (DIAL od ang. DIfferential Absorption Lidar)
przeznaczone do poszukiwań zanieczyszczeń gazowych, np. ozonu lub NO
2
,
z
fluorescencyjne (FLIDAR - Fluorescence Lidar) o bardzo szerokim spektrum
zastosowań, m. in. do badań roślinności i zbiorników wodnych,
z
lidary dopplerowskie (koherentne) stosowane w meteorologii do mierzenia
prędkości wiatru,
z
ramanowskie (również rozproszeniowe),
z
inne.
W lidarach korzysta się z laserów impulsowych, które dają możliwość generowania
silnych impulsów o krótkim czasie trwania, co pozwala uzyskać odpowiednią przestrzenną
zdolność rozdzielczą. Czas trwania typowego impulsu laserowego wynosi 6-20 ns, co
odpowiada rozdzielczości przestrzennej 2-6 m.
Pracownia Technik Pomiarowych
3
teleskop
fotopowielacz
laser
Zasilacz
fotopowielacza
Zasilacz
lasera
foto-
dioda
1.2. Układ doświadczalny
Lidar użyty w ćwiczeniu jest prostym lidarem
rozproszeniowym. W jego skład wchodzi:
nadajnik:
• laser azotowy (zasilacz i głowica) o parametrach:
długość fali emitowanego światła: 337,1 nm,
połówkowy czas trwania impulsu: ok. 5 ns,
energia impulsu: 0,1 mJ,
częstość wytwarzania impulsów: 5 Hz.
odbiornik:
• teleskop (teleskop Newtona o średnicy 21 cm i
ogniskowej 60 cm),
• fotopowielacz (EMI 9558 QB ),
• czas narastania sygnału – 17 ns,
układ akwizycji
• oscyloskop USB (Dataman 520).
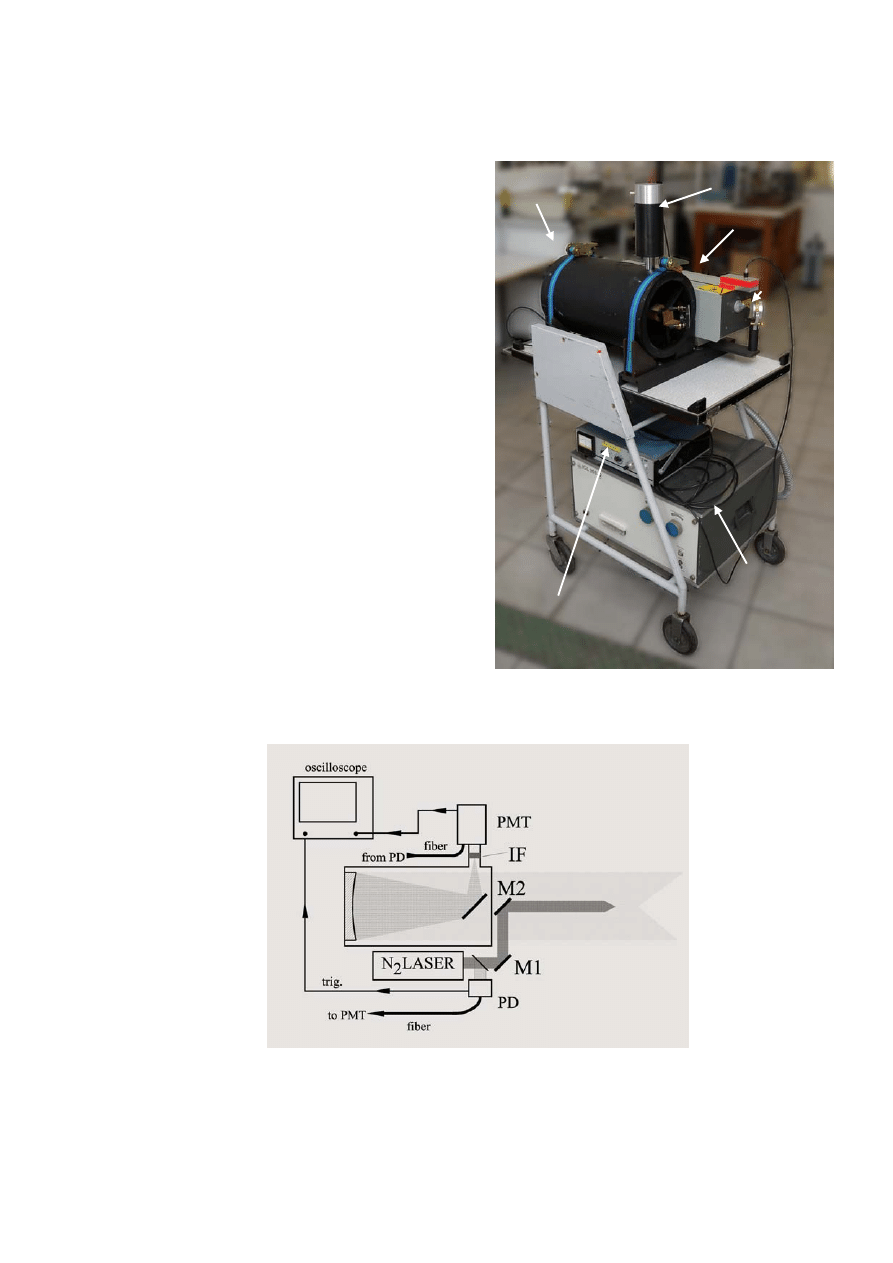
Zdjęcie lidaru przedstawia rys. 2., a jego schemat –
rys. 3.
Rys. 2 Zdjęcie lidaru na Pracowni
Technik Pomiarowych
Rys. 3. Schemat lidaru stosowanego w Pracowni Technik Pomiarowych
Pracownia Technik Pomiarowych
4
Wiązka laserowa, wysłana wzdłuż osi optycznej teleskopu (za pomocą zwierciadeł M1 i
M2), jest rozpraszana we wszystkich kierunkach przez składniki atmosfery (w ogólności,
również pochłaniana). Światło rozproszone do tyłu jest częściowo wychwytywane przez
teleskop i ogniskowane na fotokatodzie fotopowielacza (PMT). Wiązka światła
rozproszonego przechodzi przez filtr (IF) o transmisji maksymalnej (~50 %) dla długości fali
337,1 nm i szerokości spektralnej 12 nm. Sygnał z fotopowielacza jest zamieniany na postać
cyfrową przez przetwornik analogowo-cyfrowy wbudowany w oscyloskop i przesyłany do
komputera za pomocą złącza USB, gdzie może podlegać dalszej analizie. Przy otworze
wyjściowym lasera znajduje się fotodioda (PD) wytwarzająca impulsy synchronizujące pracę
oscyloskopu z pracą lasera oraz światłowód wychwytujący część wyjściowego impulsu
światła.
1.3. Analiza sygnału echa
Opóźnienie
Δ
t sygnału rejestrowanego przez lidar w stosunku do wyjściowego impulsu
laserowego jest proporcjonalne do odległości z od obiektów rozpraszających światło:
c
z
t
/
2
=
Δ
,
(1)
gdzie c jest prędkością światła w atmosferze. Amplituda impulsu jest miarą wydajności
rozpraszania wstecznego. W przypadku rozpraszania na cząstkach aerozolu jest miarą ich
koncentracji.
Rejestrowane przez lidar promieniowanie rozproszone do tyłu opisywane jest przez
równanie lidarowe, które w najprostszej postaci można zapisać następująco:
⎥
⎦
⎤
⎢
⎣
⎡
−
=
∫
z
dx
x
z
z
A
z
L
0
2
)
(
2
exp
)
(
)
(
α
β
, (2)
gdzie:
z - odległość, z jakiej przychodzi rozproszone światło,
L(z) - wartość sygnału echa zarejestrowana z odległości z,
β
(z) - współczynnik rozpraszania światła do tyłu,
α
(z) - współczynnik ekstynkcji światła wiązki laserowej,
A - stała aparaturowa.
.
Zanik sygnału, odwrotnie proporcjonalny do z
2
, jest związany ze zmieniającą się wraz
z odległością wartością kąta bryłowego, z którego światło jest zbierane przez zwierciadło
teleskopu. Rejestrowany sygnał jest proporcjonalny do ilości promieniowania rozproszonego
do tyłu w danym miejscu atmosfery z, opisanego przez współczynnik rozpraszania
wstecznego
β
(z). Dodatkowo, wiązka światła jest osłabiana przez ekstynkcję (rozpraszanie i
absorpcję) zachodzącą wzdłuż całej drogi: do i od miejsca rozpraszania, zgodnie z prawem
Lamberta-Beera (część równania lidarowego zawierająca funkcję wykładniczą). Tak więc,
współczynniki
α
(z) i
β
(z) charakteryzują optyczne własności atmosfery.

Pracownia Technik Pomiarowych
5
2 Wykonanie ćwiczenia
Ćwiczenie obejmuje:
a) pomiar odległości do wybranego obiektu,
b) wyznaczenie prędkości światła w atmosferze,
c) wyznaczenie współczynnika rozpraszania światła laserowego w chmurze wodnej.
W celu uruchomienie lidaru należy kolejno:
- podłączyć do sieci zasilacz lasera i zasilacz fotopowielacza,
- uruchomić komputer.
Po wczytaniu i ustabilizowaniu systemu należy:
- uruchomić oscyloskop cyfrowy (ikona dataman scope), w menu settings (górna lewa część
ekranu) wyszukać load settings i otworzyć plik lidar20 (który uruchamia oscyloskop z
rozdzielczością czasową 20 ns/cm (patrz - instrukcja obsługi oscyloskopu).
- zdjąć osłonę z teleskopu,
- założyć okulary ochronne,
- włączyć zasilacz lasera przyciskiem Netz,
- uruchomić laser naciskając klawisz Auslössung Hand,
Uwaga! Nastawy parametrów lasera zostały dobrane optymalnie !!!
Zabrania się zmieniania nastaw!!!
Uwaga! Promieniowanie laserowe, nawet rozproszone, jest szkodliwe dla oczu!!!
Zabrania się zdejmowania okularów ochronnych w czasie wykonywania ćwiczenia!!!
Bezpośrednie zaglądanie w okienko wyjściowe lasera, nawet w okularach ochronnych,
grozi uszkodzeniem wzroku!!!
Poprawność działania lidaru należy sprawdzić obserwując fluorescencję białej kartki
ustawionej przed teleskopem na drodze wiązki. Przesuwając wózek ustawiamy lidar tak, by
wiązka lasera trafiała w obiekt oddalony ok. 7-10 m (np. ściana). Włączamy zasilacz
fotopowielacza i ustawiamy wartość napięcia U=1200 V. Została ona dobrana optymalnie.
Pod żadnym pozorem nie wolno zwiększać napięcia, gdyż grozi to trwałym
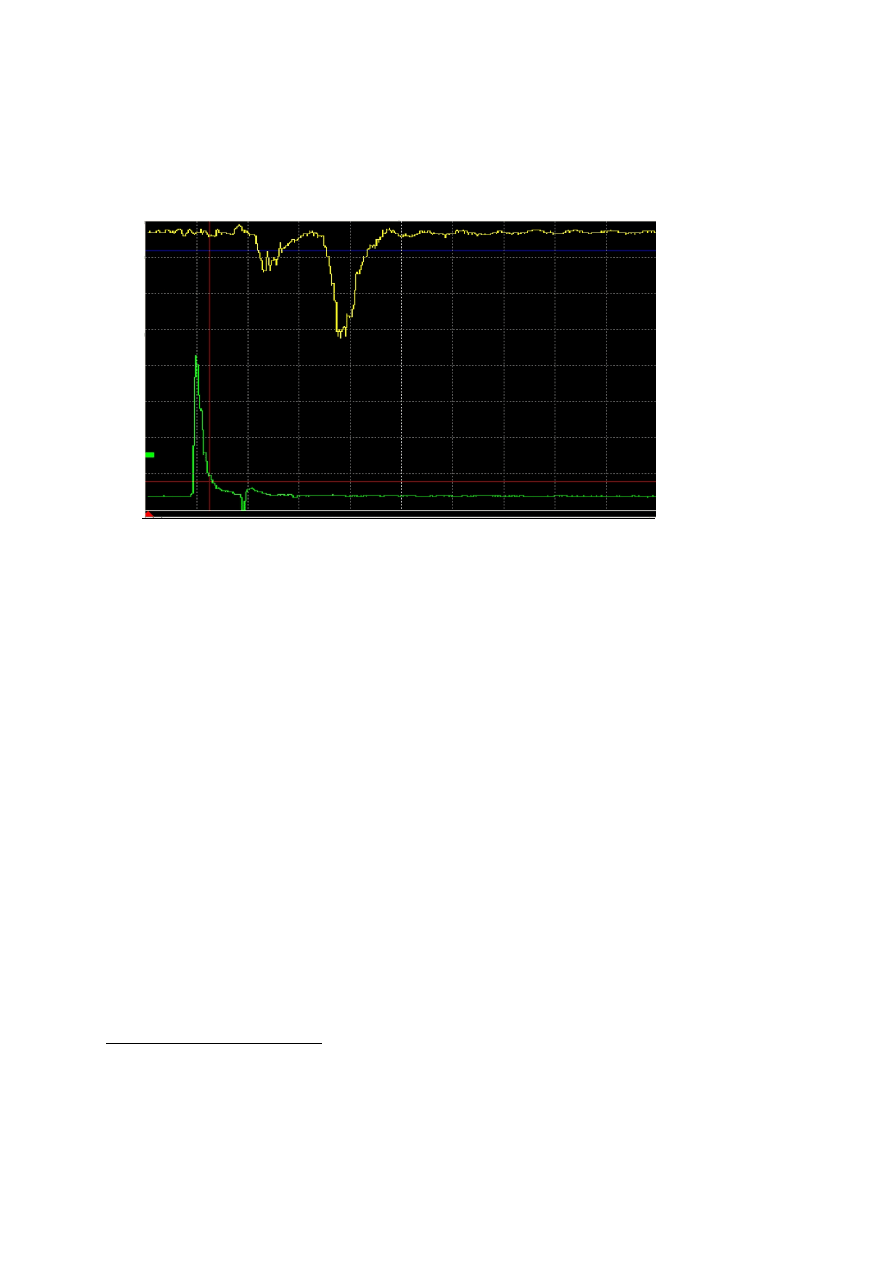
uszkodzeniem fotopowielacza! Jeżeli układ jest poprawnie zestawiony, na ekranie
komputera powinien pojawić się sygnał podobny do załączonego rys. 6.
Rys 4. Zasilacz lasera
Auslössung Hand
Netz
Rys 5. Zasilacz fotopowielacza
Pracownia Technik Pomiarowych
6
Po wykonaniu ćwiczenia wyłączyć układ wykonując w odwrotnej kolejności
czynności wymienione przy włączaniu układu.
2.1. Wyznaczanie odległości
Najprostszym lidarem jest dalmierz laserowy, urządzenie do pomiaru odległości. Jak
wspomniano, wyznaczając opóźnienie sygnału echa względem wysłanego impulsu, możemy
określić drogę przebytą przez impuls światła, czyli odległość od rozpraszającego obiektu.
Oczywiście, w ten sposób, gdy znana jest odległość do obserwowanego obiektu, możliwe jest
również wyznaczenie prędkości światła.
Wykonanie:
Na drodze wiązki, ale w odległości nie mniejszej niż 5 m
1
należy ustawić przedmiot
rozpraszający światło i za pomocą oscyloskopu zarejestrować impuls wyjściowy i jego echo
optyczne. Przykład sygnału pokazany został na rys. 6. Wspomniane dwa impulsy widać na
górnym wyk
r
esie
2
. Na dolnym wykresie widoczny jest wytwarzany przez fotodiodę impuls
synchronizacji.
Dalsze postępowanie jest następujące:
- mierzymy różnicę czasów odpowiadających maksimum obu impulsów,
- mierzymy odległość do wyznaczonego obiektu (posługując się taśmą mierniczą).
Zebrane wyniki pozwalają obliczyć:
- odległość, korzystając z zarejestrowanego opóźnienia echa sygnału,
- prędkość światła, korzystając z pomiaru odległości do obiektu rozpraszającego.
1
Odległość ta związana jest z czasową rozdzielczością fotopowielacza, która wynosi około
20 ns.
2
Impulsy są odwrócone, gdyż fotopowielacz wytwarza sygnały o polaryzacji ujemnej.
Rys
6
. Przykładowa rejestracja sygnału. Wykres dolny - impuls
synchronizacji z fotodiody (trigger), wykres górny - zarejestrowane
przez fotopowielacz: sygnał wyjściowy i sygnał rozproszony.
Pracownia Technik Pomiarowych
7
2.2. Wyznaczenie względnego współczynnika rozpraszania wstecznego obiektu
rozpraszającego
Podczas analizy sygnałów lidarowych w warunkach Pracowni Technik Pomiarowych
możemy jedynie porównać natężenie rozpraszania wstecznego dwóch obiektów, a więc
wyznaczyć względny współczynnik rozpraszania wstecznego. Wybrane do badania obiekty
rozpraszające powinny mieć płaską i jednorodną powierzchnię. Dobrymi obiektami będą
również kartka papieru i wykonana z tego samego papieru siatka. Powierzchnia otworów
powinna być znacznie mniejsza niż powierzchnia przekroju wiązki laserowej w odległości
umiejscowienia badanego obiektu (proszę wyjaśnić, dlaczego?). Warunek ten łatwo jest
spełnić dla lasera azotowego, którego wiązka ma znaczną rozbieżność (5±1 mrad).
Stosujemy metodę porównawczą. W określonej odległości od lasera umieszczamy
różne przedmioty i za każdym razem rejestrujemy amplitudę sygnału rozproszonego. Ze
względu na takie same warunki pomiaru (stała aparaturowa A, odległość z, współczynnik
ekstynkcji
α
(z)) iloraz amplitud sygnałów będzie równy ilorazowi współczynników
rozpraszania obu przedmiotów (2):
R
X
R
X
L
L
β
β
=
.
(3)
W przypadku porównywania kartki papieru i siatki wartość współczynnika rozpraszania
wstecznego jest proporcjonalna do oświetlanej powierzchni, dlatego można go obliczyć
analizując powierzchnię siatki:
R
X
R
X
S
S
=
β
β
.
(4)
Można wtedy porównać wyniki uzyskane dwiema metodami.
2.3.Wyznaczenie współczynnika rozpraszania chmury wodnej
Ponownie skorzystamy z porównawczej metody pomiaru. Na drodze wiązki wytwarzamy
obłok aerozolu wodnego (umieszczając pod wiązką lasera pojemnik z gotującą się wodą). Po
zarejestrowaniu impulsu światła rozproszonego pojemnik z wodą usuwamy, a umieszczamy
obiekt referencyjny (siatkę) o znanym współczynniku rozpraszania. Odległość od siatki
powinna być taka sama jak odległość do środka chmury wodnej. Porównanie sygnałów od
obu obiektów pozwala wyznaczyć współczynnik rozpraszania dla chmury.
W naszym eksperymencie badany obiekt (obłok) jest krótszy niż sondujący go impuls
laserowy. Zakładamy również, że w pracowni, na dystansie analizowanych kilku lub
kilkunastu metrów, w czystej atmosferze, wiązka ultrafioletowa jest absorbowana i
rozpraszana w pomijalnym stopniu. W związku z tym równanie (2) opisujące sygnał
rozproszony można zapisać w postaci:
2
2
2
z
A
l
z
A
l
e
L
V
V
z
ch
⋅
⋅
≈
⋅
⋅
⋅
=
⋅
−
β
β
α
, (5)
Pracownia Technik Pomiarowych
8
gdzie
β
π
=
β
V
·l, przy czym
β
V
- objętościowy współczynnik rozpraszania wstecznego, l -
droga pokonywane przez wiązkę laserową w aerozolu wodnym. Analogicznie sygnał od siatki
ma amplitudę:
2
0
z
A
L
S
S
β
=
,
(6)
gdzie
β
S
- powierzchniowy współczynnik rozpraszania wstecznego.
Dzieląc przez siebie oba równania otrzymujemy:
S
V
z
ch
l
z
z
L
L
β
β
⋅
⋅
⎟
⎠
⎞
⎜
⎝
⎛
=
2
0
,
(7)
skąd wyliczamy względny współczynnik rozpraszania wstecznego chmury wodnej.

Pracownia Technik Pomiarowych
9
Dodatek 1.
Podstawowe zjawiska oddziaływania promieniowania z materią
Fotony wyemitowane w impulsie laserowym oddziałują z cząsteczkami w atmosferze w
procesach absorpcji i rozpraszania.
2.1. Absorpcja
Absorpcja polega na pochłonięciu przez cząsteczkę fotonów, w wyniku czego następuje
jej wzbudzenie do stanu o wyższej energii oraz zmniejszenie natężenia wiązki przechodzącej
przez ośrodek. Następujące wtedy osłabienie sygnału przechodzącego przez ośrodek.
Osłabienie to będzie proporcjonalne do ilości substancji absorbującej znajdującego się na
drodze światła i do parametru charakteryzującego absorber, zwanego przekrojem czynnym na
absorpcję. Efekt ten dotyczy przypadku, gdy foton ma energię dopasowaną do przejścia
rezonansowego w atomie lub cząsteczce. W atmosferze takie dopasowanie może dotyczyć
niektórych długości fal absorbowanych np. przez cząsteczki H
2
O, CO
2
, NO
2
czy ozonu lub
SO
2
, które w niewielkich ilościach występują w powietrzu. W przypadku lidaru o krótkim
zasięgu działania (jak w Pracowni Technik Pomiarowych) efekt ten można zaniedbać.
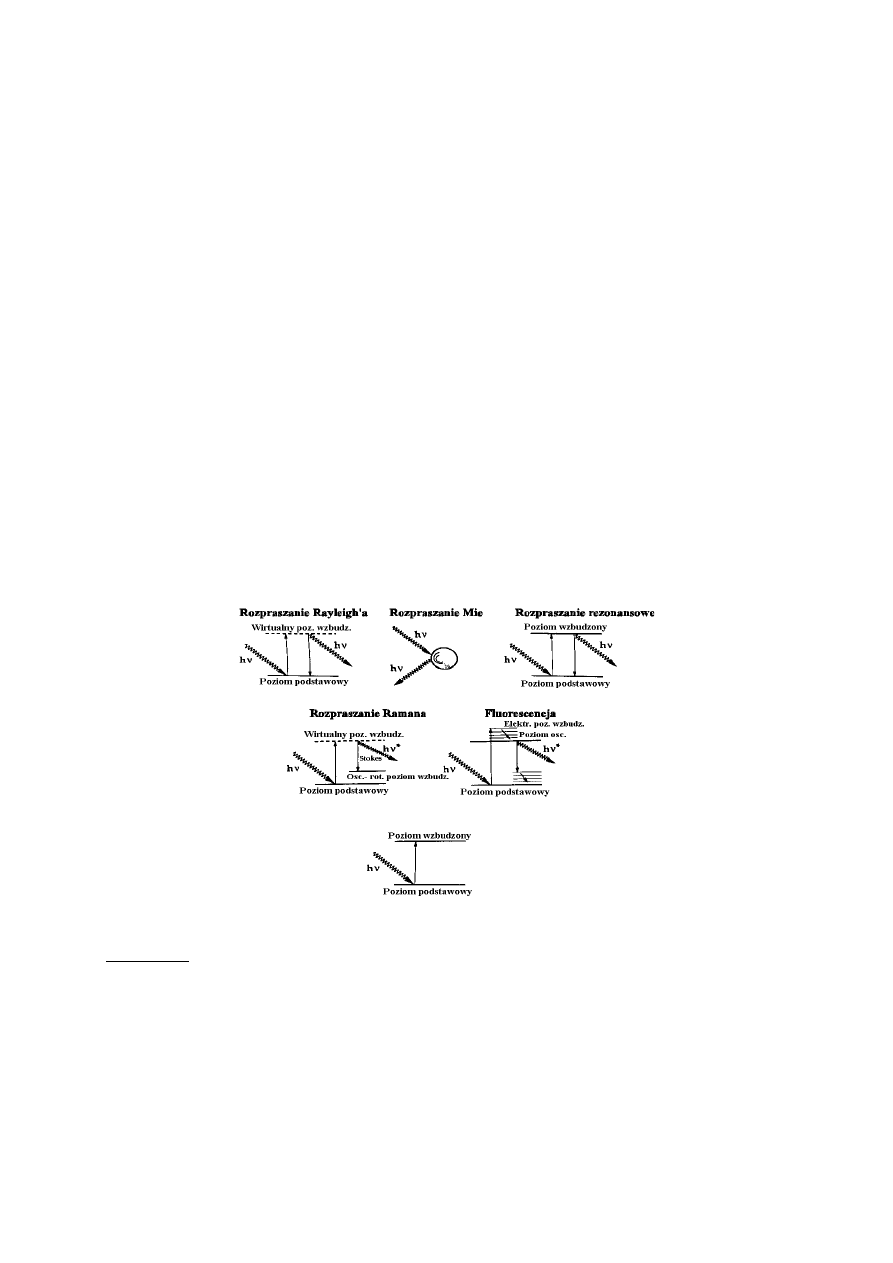
2.2. Rozpraszanie
Wyróżnia się kilka typów rozpraszania. Można je podzielić na dwa rodzaje:
rozpraszanie elastyczne, kiedy w wyniku rozproszenia długość fali nie zmienia się i
nieelastyczne, kiedy rozproszony foton ma inną energię. Rozpraszanie elastyczne to
rozpraszanie Mie, Rayleigha i rezonansowe. Przykładem rozpraszania nieelastycznego jest
rozpraszanie Ramana.
Kiedy rozmiary badanych cząsteczek są znacznie mniejsze od długości padającej fali
mamy do czynienia z rozpraszaniem Rayleigh'a. Przekrój czynny na to rozpraszanie jest
odwrotnie proporcjonalny do czwartej potęgi długości fali, zatem można się spodziewać, że
najbardziej efektywnie rozpraszane będą fale krótkie. Jednak ze względu na bardzo małe
przekroje czynne rzędu 10
-27
cm
2
(w porównaniu z przekrojami czynnymi np. na rozpraszanie
Mie, które są nawet rzędu 10
-8
cm
2
) rozpraszanie Rayleigh’a ma dominujący wpływ jedynie w
czystej atmosferze dla małych długości fal.
Rozpraszanie Mie zachodzi na cząstkach, których rozmiary są porównywalne (lub
większe) z długością fali światła oddziałującego z nimi. Mogą to być cząstki kurzu, pyłu,
aerozoli lub kropelki wody. Z punktu widzenia technik lidarowych, ze względu na duże
przekroje czynne, rozpraszanie to odgrywa dominującą rolę.
Najmniejsze znaczenie z rozproszeń elastycznych ma rozpraszanie rezonansowe.
Podobnie jak w przypadku absorpcji efekt ten dotyczy przypadku, gdy foton rozpraszany ma
energię dopasowaną do przejścia rezonansowego w atomie lub cząsteczce. W atmosferze przy
wysokim ciśnieniu (ok. 1013 hPa) bardziej prawdopodobne są straty na przejścia
bezpromieniste (bez emisji lub absorpcji fotonu np. w wyniku zderzenia z innym atomem lub
cząsteczką) do stanu podstawowego, zachodzące podczas zderzeń międzycząsteczkowych.
Rozpraszanie Ramana jest rozpraszaniem nieelastycznym ze względu na zmianę
częstości fali w stosunku do promieniowania padającego. Rozróżnia się dwa typy
Pracownia Technik Pomiarowych
10
rozpraszania Ramana. Pierwszy to rozpraszanie stokesowskie, w którym cząsteczki
wzbudzone do poziomu wirtualnego wracają emitując foton do wyższego stanu rotacyjno –
oscylacyjnego, co oznacza, że emitowany foton ma mniejszą energię, a długość jego fali
przesuwa się w kierunku czerwieni w stosunku do fotonu przed rozproszeniem. Natomiast
jeśli cząsteczka przed aktem absorpcji była już we wzbudzonym stanie rotacyjno –
oscylacyjnym elektronowego stanu podstawowego, wtedy może wystąpić rozpraszanie
antystokesowskie, w którym emitowany foton jest bogatszy w energię, gdyż po emisji
cząsteczka przechodzi do niższego poziomu oscylacyjno – rotacyjnego stanu podstawowego,
a przesunięcie długości fali następuje w stronę błękitu. Dzięki przesunięciom długości fali
fotonów odpowiadającym poziomom rotacyjno – oscylacyjnym, istnieje możliwość
identyfikacji związków, gdyż ich widma Ramana są dobrze znane i charakterystyczne.
Z fluorescencją mamy do czynienia gdy następuje wzbudzenie cząsteczki ze stanu
podstawowego do pewnego wyżej położonego poziomu elektronowo – oscylacyjno –
rotacyjnego. Następnie zachodzi bezpromieniste przejście do niższego poziomu
oscylacyjnego cząsteczki w zakresie wzbudzonego poziomu elektronowego. Sama
fluorescenja, czyli wypromieniowanie kwantu energii, następuje wskutek promienistego
przejścia cząsteczki do niższego poziomu elektronowego. Fluorescencja odgrywa dużą rolę
między innymi przy lidarowych pomiarach roślinności. Laser, umieszczany w samolocie,
służy jako źródło światła indukujące fluorescencję, czyli wywołujące emisję promieniowania
przez oświetlone z góry rośliny. Natężenie oraz rozkład spektralny docierającej do detektora
fluorescencji pozwala na identyfikację roślin, a nawet określenie ich stanu.
A b so rp cja
Absorpcja
Rys. 2. Procesy oddziaływania światła z materią
Dodatek 2.
Justowanie lidaru polega na zsynchronizowaniu kierunku wysyłanej wiązki laserowej
z osią teleskopu. Wtedy sygnał lidarowy jest najsilniejszy. Procedura justowania składa się z
kilku prostych czynności. Ekran rozpraszający należy umieścić w odległości ok. 5 m przed
lidarem i zaobserwować na oscyloskopie pochodzący od ekranu sygnał . Sygnały powinny
być uśredniane po 1-2 s. Następnie poruszając zwierciadłami M1 i M2 (rys. 3) należy dążyć

Pracownia Technik Pomiarowych
11
do uzyskania jak największej amplitudy sygnału. Powyższe czynności powtórzyć należy dla
coraz większych odległości od lidaru.
Zagadnienia na rozmowę wstępną:
1. Podaj prawo Lamberta – Beera
2. Wymień podstawowe procesy - oddziaływania promieniowania z materią,
3. Podaj zasadę działania lasera i podstawowe własności światła laserowego
4. Opisz budowę i zasadę działania lidaru
5. Lidar zarejestrował sygnał po 10μs. W jakiej odległości znajduje się obiekt
rozpraszający.
Wyszukiwarka
Podobne podstrony:
lista 2a id 269862 Nieznany
mech 2a id 290414 Nieznany
ARKUSZ POPRAWKA 2010 id 68814 Nieznany
poprawachyba2013 docx(1) id 375 Nieznany
kolokwium poprawa IS 6 id 24102 Nieznany
poprawiony plan id 375479 Nieznany
Poprawa cw322 id 375416 Nieznany
poprawione fizyka id 375462 Nieznany
egzamin poprawka z fizjo id 152 Nieznany
2A 5 id 32294 Nieznany (2)
kolokwium poprawa IS 3 id 24102 Nieznany
barwienie wyklad 2a id 632278 Nieznany (2)
jak poprawnie pipetowac id 2240 Nieznany
Poprawa 24 id 375410 Nieznany
lista 2a id 269862 Nieznany
więcej podobnych podstron