E
LEKTRONIKA DLA WSZYSTKICH 10/99
58
Do czego to służy?
Urządzenie to służy do sterowania pra−
cą silnika elektrycznego zasilanego prą−
dem stałym o napięciu 12V lub 24V. Do−
stępne na rynku sterowniki do takich sil−
ników nadają się często tylko do zmiany
kierunku obrotów lub tylko regulacji pręd−
kości obrotowej wirnika, ja natomiast
stworzyłem konstrukcję, która łączy obie
te możliwości przy jednoczesnym zacho−
waniu prostoty obsługi, która sprowadza
się do zmiany ustawienia przełącznika
machanicznego oraz obracania gałką po−
tencjometru. Sterownik ten w moim za−
myśle może być wykorzystany do stero−
wania napędem wózka inwalidzkiego lub
zestawu wentylatorów małej mocy, itp.
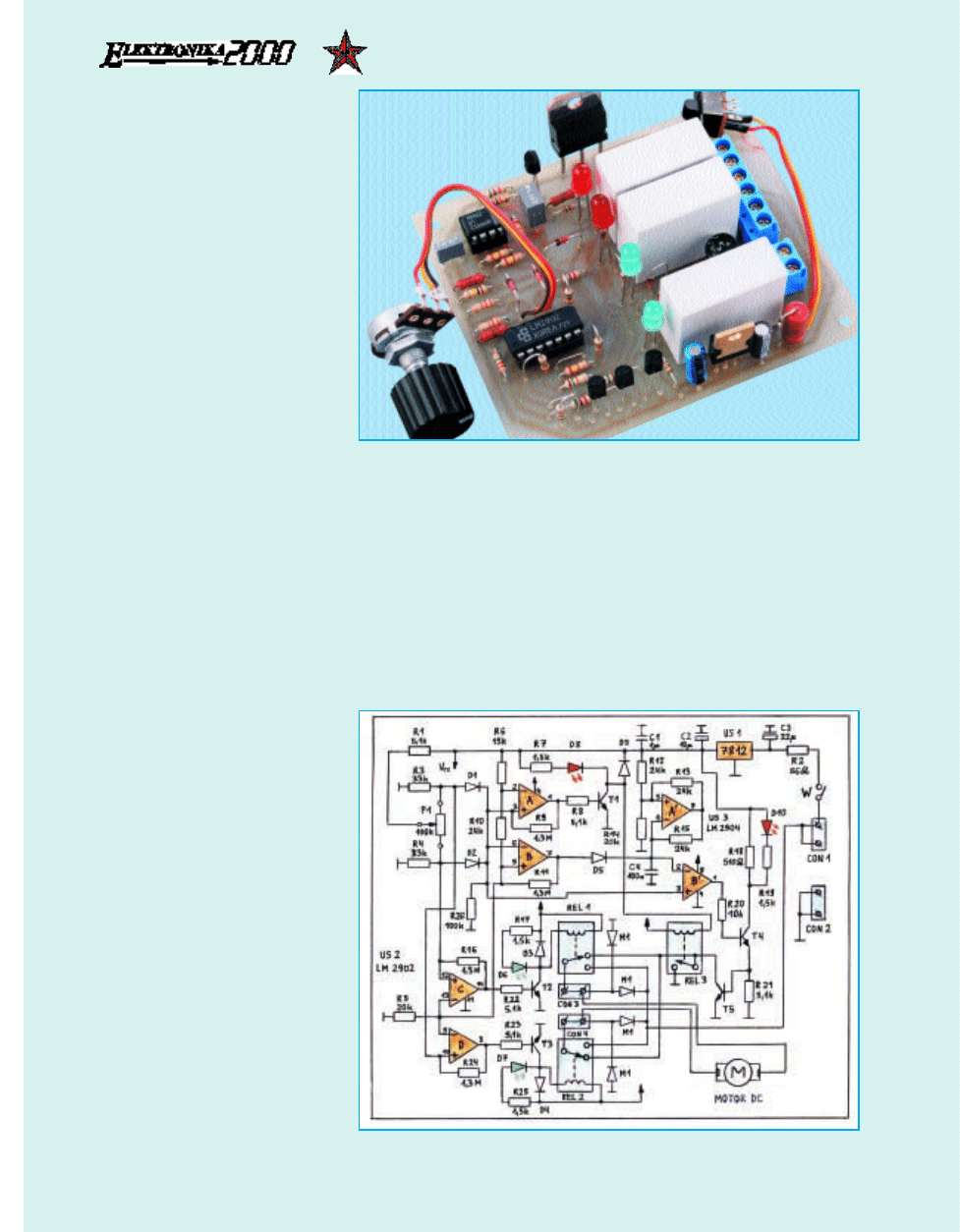
Jak to działa?
Urządzenie składa się z kilku podsta−
wowych części, tj. zestawu komparato−
rów sterujących elektromechanicznymi
przekaźnikami (REL1,2) ustawiającymi
kierunek obrotów wirnika oraz przekaźni−
kiem REL3 zwierającym tranzystor mocy
(silnik rozwija wtedy maksymalną moc);
generatora fali trójkatnej oraz komparato−
ta sterującego tranzystorem mocy. Kom−
paratory wchodzące w skład kości LM
2902 są sterowane za pomocą potencjo−
metru P1, który z rezystorami R3, R4 i R1
tworzy podwójny dzielnik napięcia. W try−
bie pracy spoczynkowej suwak P1 musi
znajdować się w połowie długości ścież−
ki oporowej (tolerowane są spore odchył−
ki w obie strony), tak by napięcia na R3
i R4 były niższe od napięć odniesienia
ustalonych na poszczególnych “szcze−
blach” drabinki rezystorów R5, R6 i R10.
Wtedy wszystkie układy będą wyłączo−
ne. Wejścia “minusowe” komparatorów
C i D są podłączone do wspólnego napię−
cia odniesienia, zaś wejścia “dodatnie”
do przeciwległych końców ścieżki oporo−
wej P1. Dzięki temu przy obracaniu osią
P1 w którąkolwiek stronę tylko jeden
z tych układów załączy przekaźnik, bo tyl−
ko na jednym wejściu “dodatnim” poten−
cjał wzrośnie powyżej napięcia odniesie−
nia. Komparatory A i B muszą zadziałać
w odpowiednim momencie przy obraca−
niu osią P1 w lewo jak i w prawo, tak
więc napięcia na rezystorach R3 i R4 mu−
siały być sprowadzone do jednego punk−
tu za pomocą diod D1 i D2. Komparator
B nie zadziała jednocześnie z komparato−
rami C lub D (ich odpowiednie wejścia są
na wspólnym potencjale odniesienia), bo
napięcie sterujące jego pracą jest mniej−
sze od napięć sterujących komparatorami
C i D o 0,6V (spadek napięcia na D1 i D2)
i właśnie o tę co najmniej wartość napię−
cie na jego wejściu “ujemnym” musi
wzrosnąć by na wyjściu pojawił się stan
niski, który zapewni odblokowanie gene−
ratora wykonanego na wzmacniaczu ope−
racyjnym A (kostka LM 2904) i umożliwi
uruchomienia tranzystorów T4 i T5 za po−
średnictwem komparatora B. Komparator
B porównuje poziom napięcia trójkątnego
z napięciem sterującym i załącza T4 sygna−
łem prostokątnym, którego wypełnienie
Sterownik silnika DC
R
Ry
ys
s.. 1
1.. S
Sc
ch
he
em
ma
att iid
de
eo
ow
wy
y
59
E
LEKTRONIKA DLA WSZYSTKICH 10/99
rośnie wraz ze wzrostem napięcia na
wejściu nieodwracającym. Gdy poziom
napięcia sterującego będzie większy niż
amplituda sygnału trójkątnego, tranzystor
mocy T5 przejdzie w tryb pracy ciągłej
zwierając na stałe styki przekaźnika
zwiernego. Dzięki temu przy ich zwiera−
niu lub rozwieraniu nie wystąpi na nich
żadne iskrzenie. Rezystory R9, R11, R16
i R24 zapewniają komparatorom A −
D niewielką histerezę likwidującą możli−
we zakłócenia przy sterowaniu przekaźni−
kami. Diody LED D6−8 sygnalizują załą−
czenie przekaźników, natomiast jasność
świecenia D10 zależna od wypełnienia
impulsów załączających T4 i T5 pozwala
obserwować ilość mocy dostarczanej do
silnika. Mostek prostowniczy M1 usuwa
przepięcia powstające w uzwojeniach
wirnika silnika.
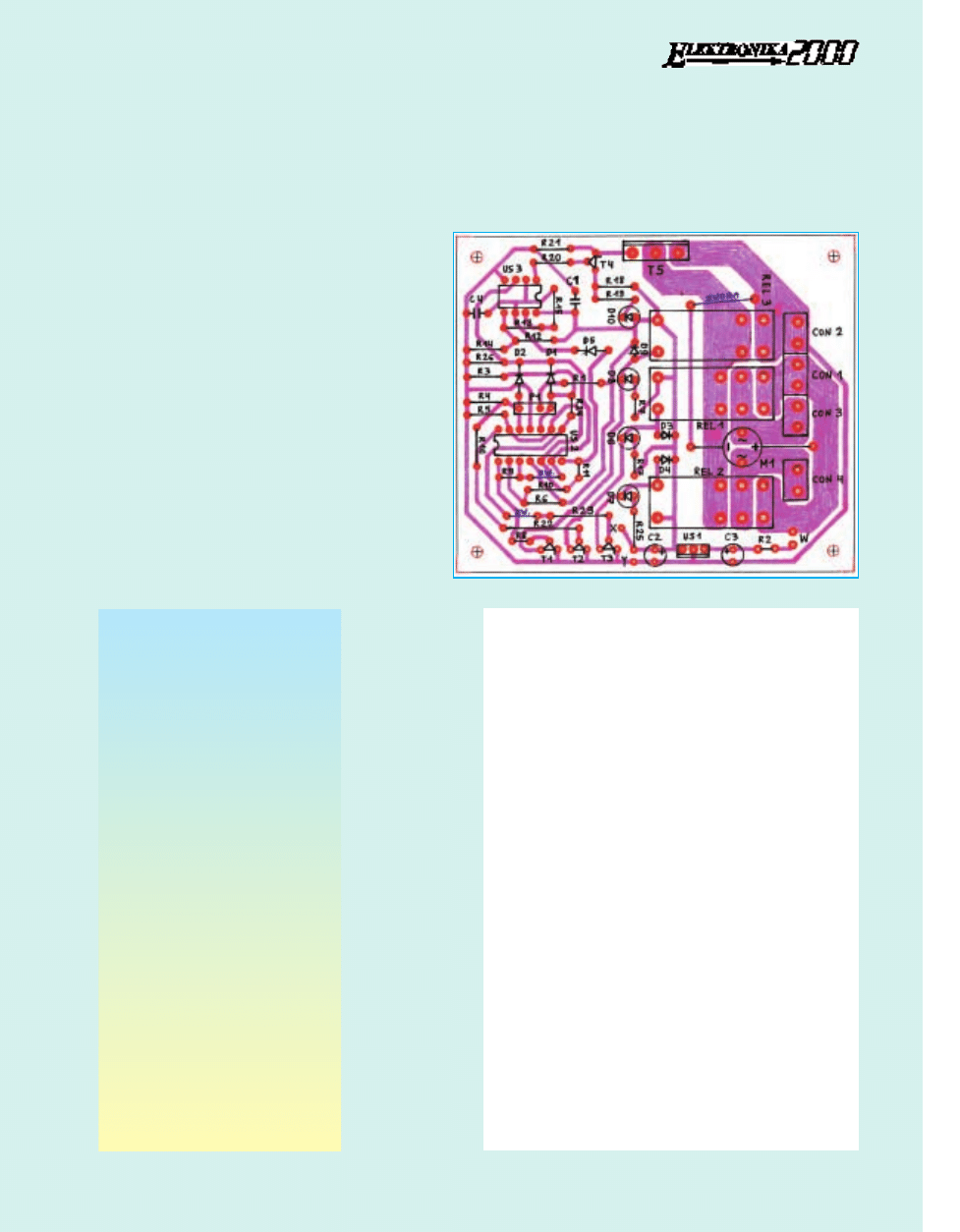
Montaż i uruchomienie
Sterownik montuje się na płytce
(R
Ry
ys
s..2
2) w takiej kolejności: najpierw
zworki i elementy elektromechaniczne,
potem elementy bierne i półprzewodniki.
Dobrze zmontowany układ powinien
działać po włączeniu zasilania. Jeśli urzą−
dzenie będzie zasilane napięciem 24V, to
trzeba zamontować scalony stabilizator
12V oraz opornik R2, którego zadaniem
jest zmniejszenie mocy wydzielającej się
na US1, tak by mógł obejść się bez radia−
tora. W razie wykorzystania punktów lu−
towniczych X i Y, które służą do zasilania
współpracującego urządzenia, np.: obro−
tomierza, pobór prądu będzie większy
(normalnie nie przekracza 150mA) a opor−
ność R2<68
Ω
(stabilizator może wyma−
gać niewiel−
kiego radiato−
ra). Przy zasi−
laniu z aku−
m u l a t o r a
12V elemen−
ty US1 i R2
trzeba zastą−
pić zworami.
R a d i a t o r
chłodzący T5
nie musi być
duży, bo wy−
dzielająca się
na nim moc
strat, z uwagi
na nieliniowy
charakter je−
go pracy (jest
z a w s z e
w stanie peł−
nego zatka−
nia lub otwar−
cia), również
nie będzie duża.
Tranzystor
T5
można
zastąpić
M O S F E T − e m ,
np. BUZ350 lub
BUZ11 (po uprze−
dnim “rozkracze−
niu” jego dwóch
końcówek). W tym
wypadku R18 jest
zbędny,
zaś
R19=330
Ω
a R21=1k
Ω
. Instala−
cja zasilająca całe
urządzenie lub sam
silnik musi być wy−
posażona w bez−
piecznik (typ dowol−
ny) na prąd nie
większy niż 15 − 20
A. W razie trudności
ze zdobyciem okrą−
głego
mostka
1,5A można wykorz−
systać dwa połą−
czone równolegle
(jeden na drugim)
mostki 1A.
A
Ad
da
am
m S
Siie
eń
ńk
ko
o
O
Od
d R
Re
ed
da
ak
kc
cjjii:: U
Uk
kłła
ad
d jje
es
stt w
wp
prra
aw
wd
dzziie
e
b
ba
arrd
dzzo
o rro
ozzb
bu
ud
do
ow
wa
an
ny
y ((p
po
od
da
an
ne
e ffu
un
nk
kc
cjje
e
m
mo
ożżn
na
a zzrre
ea
alliizzo
ow
wa
ać
ć p
prro
oś
śc
ciie
ejj)),, jje
ed
dn
na
ak
k
n
niie
ew
wą
ąttp
plliiw
wiie
e jje
es
stt iin
ntte
erre
es
su
ujją
ąc
cy
y.. N
Na
a
s
szzc
czze
eg
gó
ólln
ną
ą u
uw
wa
ag
gę
ę zza
as
słłu
ug
gu
ujje
e s
sp
po
os
só
ób
b ii
s
stta
arra
an
nn
no
oś
ść
ć w
wy
yk
ko
on
na
an
niia
a d
do
ok
ku
um
me
en
ntta
ac
cjjii.. W
W
a
arrtty
yk
ku
ulle
e zza
am
miie
es
szzc
czzo
on
no
o s
sk
ka
an
ny
y o
orry
yg
giin
na
all−
n
ny
yc
ch
h ((o
od
drrę
ęc
czzn
ny
yc
ch
h)) rry
ys
su
un
nk
kó
ów
w a
au
utto
orra
a..
R
Ry
ys
s.. 2
2.. S
Sc
ch
he
em
ma
att m
mo
on
ntta
ażżo
ow
wy
y
Wykaz elementów
Rezystory
R1,R8,R21−23 . . . . . . . . . . . . . . . . .5,1k
Ω
R2 . . . . . . . . . . . . . . . . . . . . 56
Ω
68
Ω
/1W
R3,R4 . . . . . . . . . . . . . . . . . . . . . . .33k
Ω
R5,R14 . . . . . . . . . . . . . . . . . . . . . .20k
Ω
R6 . . . . . . . . . . . . . . . . . . . . . . . . . .15k
Ω
R7, R17, R19, R25 . . . . . . . . . . . . .1,5k
Ω
R10, R12, R13, R15 . . . . . . . . . . . . .24k
Ω
R9, R11, R16, R24 . . . . . . . . . . . .1,3M
Ω
R20 . . . . . . . . . . . . . . . . . . . . . . . . .10k
Ω
R26 . . . . . . . . . . . . . . . . . . . . . . . .100k
Ω
R18 . . . . . . . . . . . . . . . . . . . . . . . . .510
Ω
P1 − potencjometr obrotowy 100kA
Kondensatory
C1 . . . . . . . . . . . . . . . . . . . . . . . . . . .1
µ
F
C2 . . . . . . . . . . . . . . . . . . . . . . . . . .10
µ
F
C3 . . . . . . . . . . . . . . . . . . . . . . . . . .22
µ
F
C4 . . . . . . . . . . . . . . . . . . . . . . . . .100nF
Półprzewodniki
US1 . . . . . . . . . . . . . . . .stabilizator 7812
US2 . . . . . . . . . . . . . .LM 2902 (LM 324)
US3 . . . . . . . . . . . . . .LM 2904 (LM 358)
D1−5, D9 . . . . . . . . . . . . . . . . . . .1N4148
D6, D7 . . . . . . . . . . . .dioda LED GREEN
D8,D10 . . . . . . . . . . . . . .dioda LED RED
M1 . . . . . . . . .mostek prost. okrągły 1,5A
T1−T4 . . . . . . . . . . . . . .BC 237 (BC 547)
T5 . . . . . .tranzystor Darlingtona BDW 83
Pozostałe
REL1, REL2 . . . . . . . .przekaźnik RM 83P
12V/16A
REL3 . . . . . . przekaźnik RM 83Z 12V/16A
CON1−4 . . . . . . . . . . . . . . . . . . . . .ARK 2
MOTOR DC np. 24V/10A
Wyszukiwarka
Podobne podstrony:
akumulator do opel kadett e estate 35 36 45 46 12 13 n 13 s
12 (46)
Zagadnienia 46-49, Prawo finansowe(12)
12 1995 46 48
La lettre (ex 12 p 46, unite 7)
08 04 25 12 33 46 pistolety natryskowe balossiid 7568
bluzka 12 size 46
12 1995 46 48
2007 12 29 14 46 mapa konturowa afryki rzeki A4
2010 01 29 12 42 46 01
wykład 12 pamięć
Figures for chapter 12
Mechanika techniczna(12)
Socjologia wyklad 12 Organizacja i zarzadzanie
więcej podobnych podstron