E. Michlowicz: IMW – Modelowanie mechanizmu jazdy
1
WYKŁAD 5
MODELOWANIE MECHANIZMU JAZDY
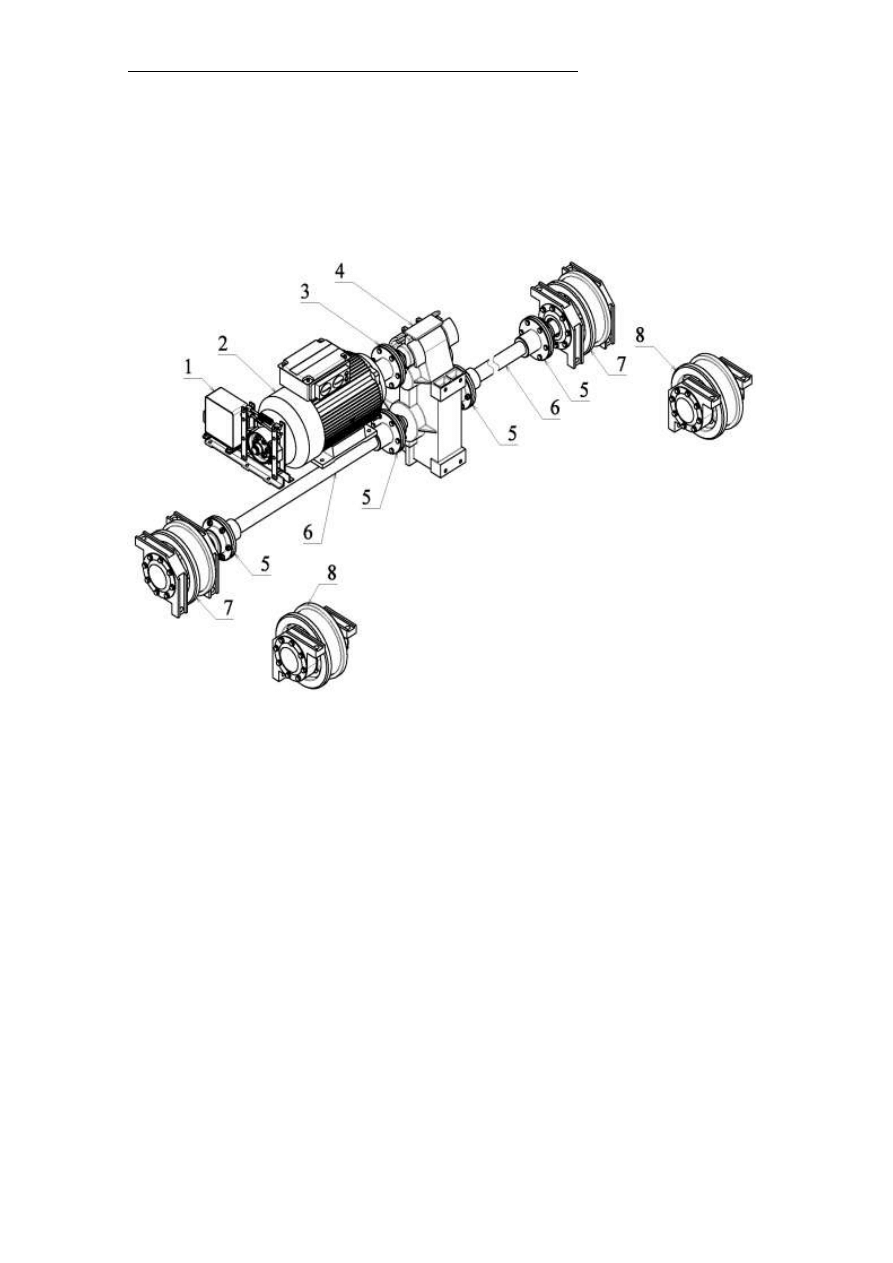
Mechanizm jazdy –
1 – hamulec,
2 – silnik,
3 – sprzęgło zębate dwustronne,
4 – przekładnia zębata,
5 - sprzęgło zębate dwustronne,
6 - sprzęgło zębate jednostronne,
7 – wał wolnobieżny,
8 – zestaw kołowy napędzany,
9 – zestaw kołowy nienapędzany.
1. Stany nieustalone w ruchu mechanizmu jazdy
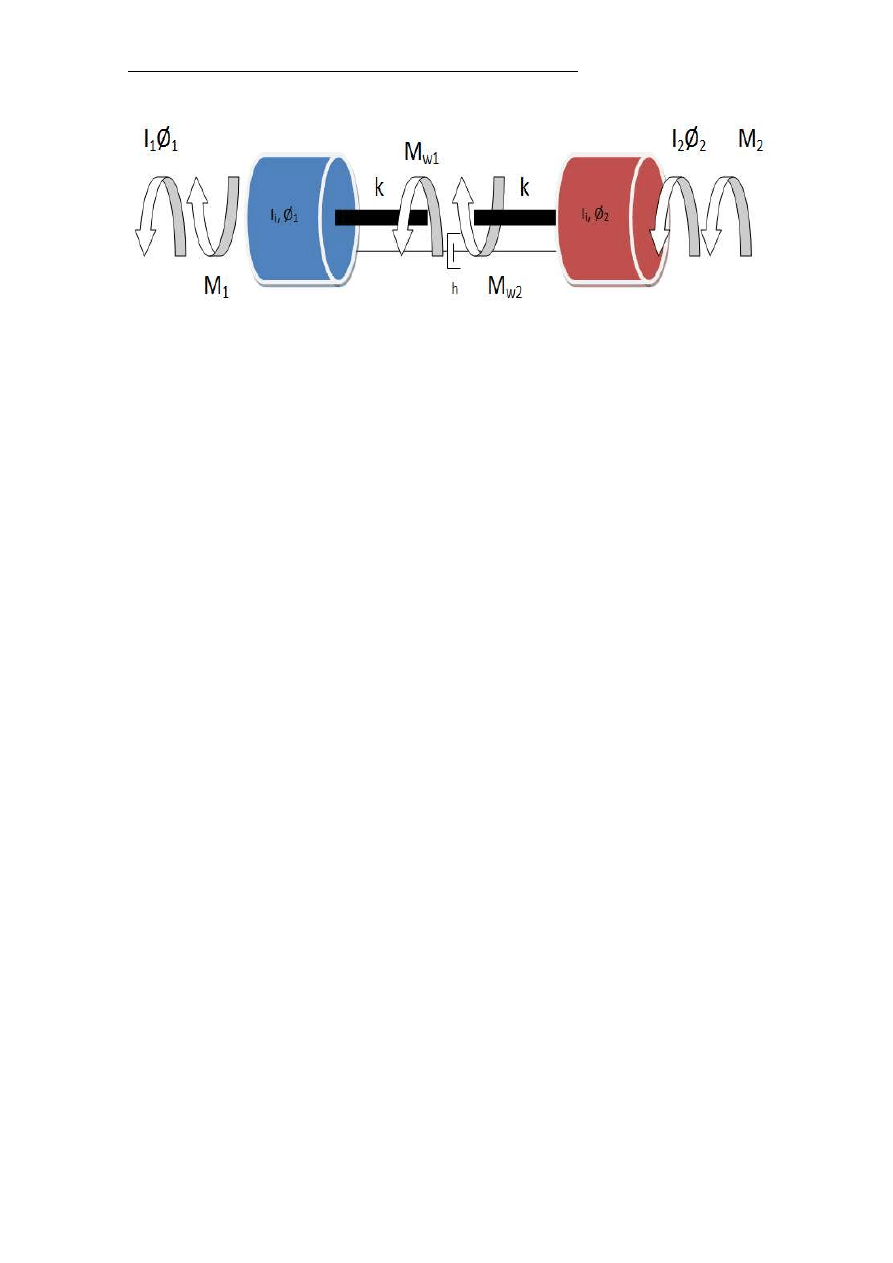
Model mechanizmu jazdy najlepiej sprowadzić do modelu obrotowego,
ponieważ elementy układu poruszają się ruchem obrotowym zarówno od
strony napędowej (wał silnika, sprzęgło hamulcowe, koła zębate), jak i od
strony napędzanej (sprzęgła zębate, koła jezdne). Zobrazowane jest to na
rysunku 1.
E. Michlowicz: IMW – Modelowanie mechanizmu jazdy
2
Rys. 1. Model matematyczny – mechanizmu jazdy
I
ZR1
– moment bezwładności zredukowany na wał wolnobieżny przekładni,
zastępujący moment bezwładności wirnika silnika ( I
S
), sprzęgła ( I
SP
), bębna
hamulca( I
H
), kół zębatych, sprzęgieł przy przekładni ( I
SP1
);
I
ZR2
– moment bezwładności zredukowany na wał wolnobieżny przekładni,
zastępujący moment bezwładności kół jezdnych ( I
K
), i sprzęgieł ( I
SP2
);
M
1
– moment siły na wale wolnoobrotowym przekładni, pochodzący od
momentu silnika ( M );
M
2
– moment siły na wale wolnoobrotowym przekładni, pochodzący od oporów
jazdy wózka ( W );
k – zastępczy współczynnik sztywności wolnoobrotowych wałów napędzających
koła jezdne;
h – zastępczy współczynnik tłumienia w wałach napędzających koła jezdne.
2. Równania ruchu
2.1. Rozruch
Mechanizm jazdy pokonuje siłę oporów jazdy W, która wynika z oporów
toczenia kół jezdnych wózka po szynach oraz oporów w łożyskach kół. Koła
jezdne obciążone są ciężarem masy m
2
, która obciąża mechanizm podnoszenia
oraz masy wózka m
w
. Zakładamy, że w fazie rozruchu bezwładność ładunku
zawieszonego na haku, a także jego wahania mają pomijalnie mały wpływ.
W mechanizmie jazdy podobnie jak w mechanizmie podnoszenia występują
trzy fazy ruchu. W fazie pierwszej występuje kasowanie luzów (głównie
międzyzębnych w przekładni zębatej).
W tej fazie ruchu masa m
1
obraca się bez oporu ze strony więzów.
Przebyta droga jest równa wielkości luzu w elementach więzów. Po niej
zaczyna się faza druga, którą jest napinanie więzów. Trwa ona do chwili
pokonania oporu momentu obciążenia przez moment skręcenia wału M
w
= k(φ
1
– φ
2
).
E. Michlowicz: IMW – Modelowanie mechanizmu jazdy
3
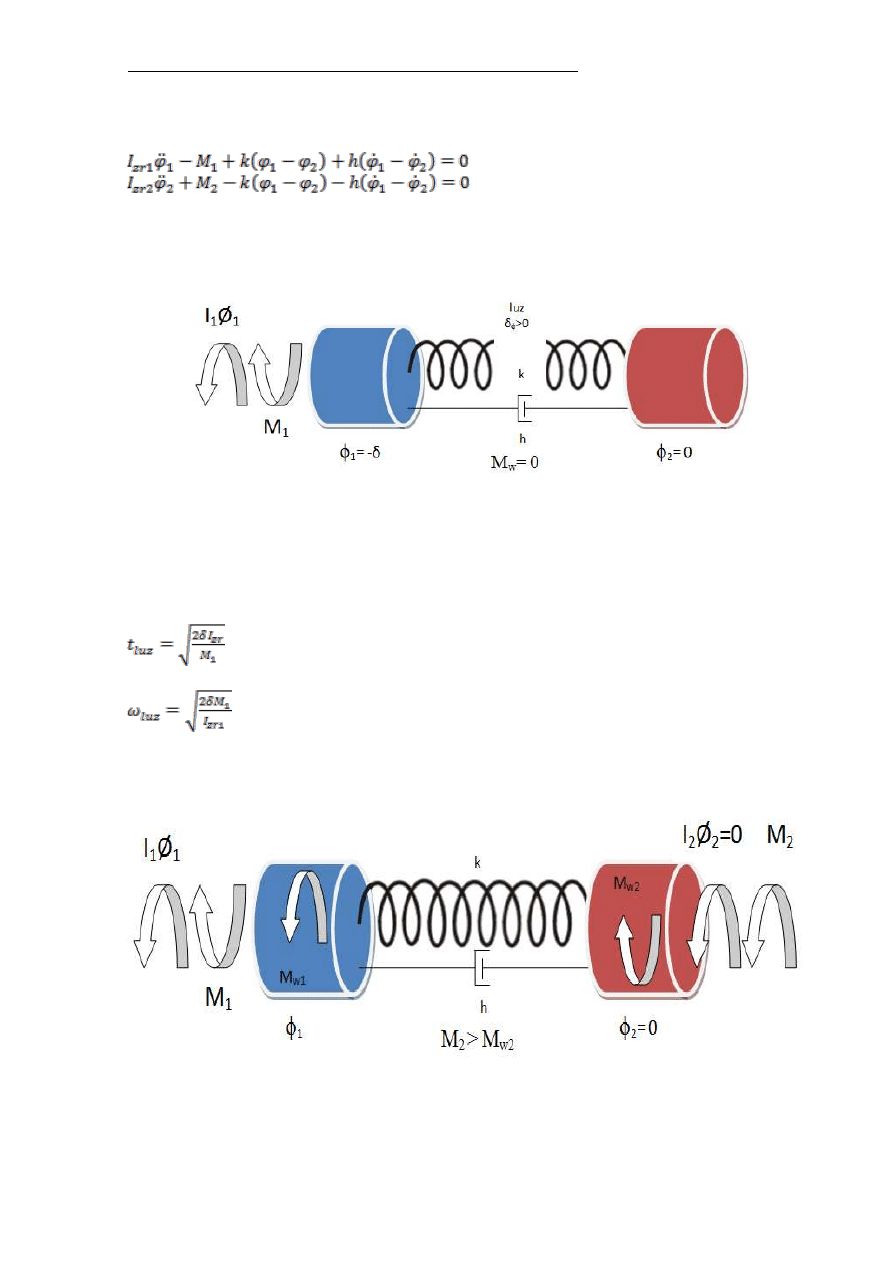
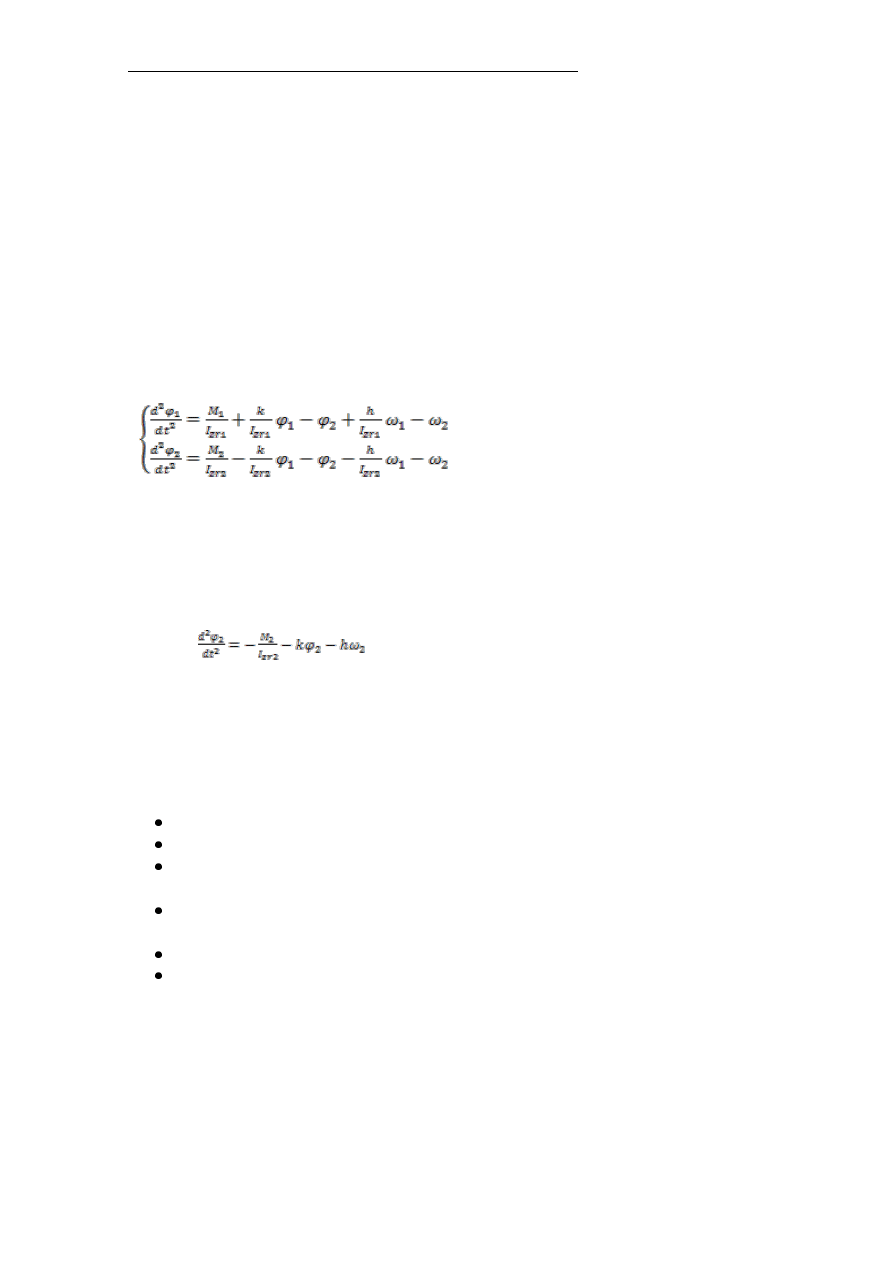
Ostatnia faza ruchu to ruch obu mas opisany układem równań:
(2.1)
a) faza pierwsza
Rys. 2. Schemat sił działających w mechanizmie jazdy podczas rozruchu –
faza pierwsza
- kasowanie luzów (ω
1
=0, φ
1
=-δ, ω
2
=0, φ
2
=0 )
(2.2)
(2.3)
b) faza druga
Rys. 3. Schemat sił działających w mechanizmie jazdy podczas rozruchu –
faza druga
E. Michlowicz: IMW – Modelowanie mechanizmu jazdy
4
- napinanie więzów (φ
1
= , ω
1
= ω
luz
)
(2.4)
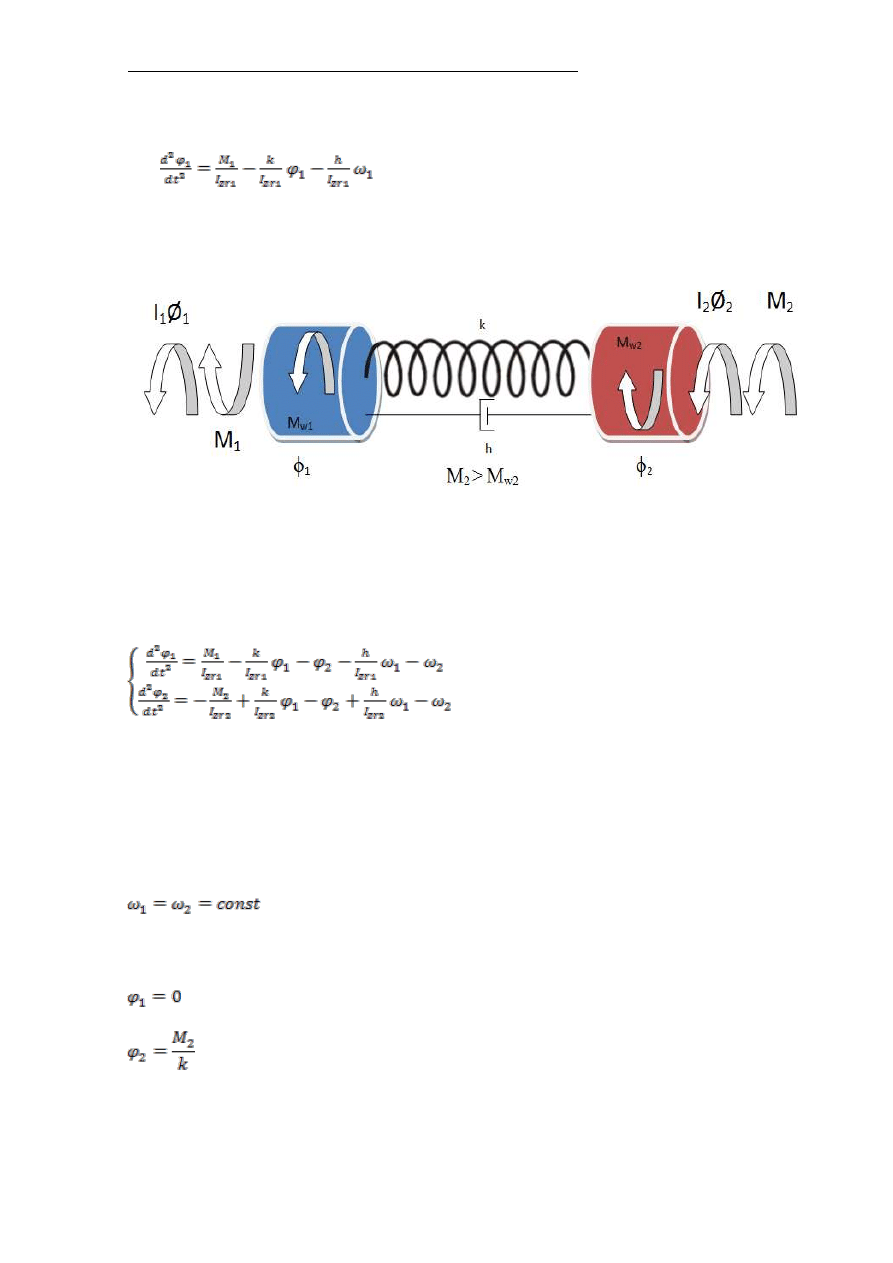
c) faza trzecia
Rys.4. Schemat sił działających w mechanizmie jazdy podczas rozruchu –
faza trzecia
- faza, w której obie masy są w ruchu (φ
1
= φ
1
(t
*
), ω
1
= ω(t
*
))
t
*
- czas napinania więzów
(2.5)
2.2. Hamowanie
W chwili rozpoczęcia hamowania ruch jest ustalony tj. prędkości obrotowe
obu końców wału napędowego są stałe i jednakowe:
a więź jest napięta momentem oporu jazdy:
W pierwszej fazie hamowania następuje kasowanie luzów. Aby proces
ten był łagodniejszy pomiędzy chwilą wyłączenia silnika i włączenia hamulca
E. Michlowicz: IMW – Modelowanie mechanizmu jazdy
5
stosuje się krótką przerwę, aby nastąpiło zwolnienie więzów. Pozwala to
uniknąć negatywnych skutków kasowania luzów przy pełnej wartości momentu
hamowania.
Druga faza zaczyna się od skasowania luzów, a koniec następuję w
momencie zatrzymania się masy m
1
. Występuje tu ruch opóźniony obu mas,
który można opisać układem równań różniczkowych.
Po zatrzymaniu masy m
1
rozpoczyna się faza trzecia, jest nią ruch masy
m
2
(kół wózka) hamowany oporami ruchu, w trakcie tej fazy następuje
zwolnienie więzów.
Pierwsza faza obie masy w ruchu (ω
1
= ω
2
= ω
nom
= const , φ
1
= 0, φ
2
= M
2
/k)
(2.6)
Druga faza jedna masa w ruchu (φ
2
= φ
2
(t
*
), ω
2
= ω
2
(t
*
))
t
*
- czas, po którym zatrzymała się masa 1
(2.7)
3. Parametry do identyfikacji
Z rozważań zawartych w punktach 1-2 wynika, że każdorazowo do
pełnego opisu równań ruch należy wyznaczyć sześć parametrów:
k – współczynnik sprężystości więzi (np. wału wolnoobrotowego),
h – współczynnik tłumienia więzi,
I
zr1
- moment bezwładności zredukowany na wał wolnoobrotowy –
od strony silnika,
I
zr2
– moment bezwładności zredukowany na wał – od strony kół
jezdnych wraz z przemieszczaną masą (wózek i ciężar),
M
1
lub M
h
– obciążenie czynne – od silnika lub hamulca,
M
2
– obciążenie bierne – od oporów jazdy (ciężar i wózek).
Ważne uwagi:
- przy redukcji sił lub momentów sił korzystamy z zasady zachowania
mocy w układzie (z uwzględnieniem odpowiedniej sprawności),
- przy redukcji mas lub momentów bezwładności korzystamy z zasady
zachowania energii badanego układu.
Wyszukiwarka
Podobne podstrony:
IMW W04 Model mech podnosz id 2 Nieznany
mech 2a id 290414 Nieznany
Impregnaty trojfunkcyjne id 212 Nieznany
Mech cw 1 id 290375 Nieznany
mech 3b id 290418 Nieznany
mizan Z2 MECH EN id 778695 Nieznany
mech 1a id 290411 Nieznany
model Holdy 2011 id 305189 Nieznany
mech 1b id 290412 Nieznany
Model warstwowy OSI id 304998 Nieznany
mech 3a id 290417 Nieznany
mech 2c id 290416 Nieznany
model Holdy 2012 id 305190 Nieznany
nauka jazdy id 315233 Nieznany
mech 1c id 290413 Nieznany
mizan Z3 MECH EN id 778696 Nieznany
mizan Z1 MECH EN id 778694 Nieznany
więcej podobnych podstron