
POLITECHNIKA WARSZAWSKA
INSTYTUT TECHNOLOGII MASZYN
Laboratorium Napędów i Sterowań Płynowych
Ćwiczenie 2
NIERÓWNOMIERNOŚĆ PRĘDKOŚCI RUCHÓW NAPĘDÓW
PNEUMATYCZNYCH I PNEUMOHYDRAULICZNYCH
redakcja mgr inż. Grzegorz Lis
Warszawa, styczeń 2008
1. NIEROWNOMIERNOŚĆ PRĘDKOŚCI RUCHU NAPĘDÓW PNEUMATYCZNYCH l
PNEUMOHYDRAULICZNYCH
1.1. WIADOMOŚCI WSTĘPNE
Elementy pneumatyczne, w których sprężone powietrze podawane jest na przemian z obu
stron elementu ruchomego (np. tłoka), są szeroko wykorzystywane w pneumatycznych układach
napędowych Jako elementy wykonawcze (siłowniki) i elementy sterujące. Spośród, siłowników
pneumatycznych najpowszechniejsze zastosowanie znajdują siłowniki dwustronnego działania.
Siłowniki w pneumatycznych układach napędowych nie mogą w większości przypadków
zapewnić zrealizowania zadanego przebiegu ruchu tłoka z dużą dokładnością, ponieważ powietrze
jest ściśliwe. Mimo tego zakres zastosowań napędów pneumatycznych stale się rozszerza. Często
bowiem zadany przebieg ruchu nie musi być ścisłe zachowany, a w wielu przypadkach może być
dowolny, istotne może być tylko zapewnienie określonego czasu ruchu.
Prędkość tłoka nastawiana jest przeważnie za pomocą zaworu dławiącego (dławika). W
zależności od miejsca zainstalowania dławika (zwykle równo legie połączonego z zaworem zwrotnym)
rozróżnia się nastawianie prędkości poprzez dławienie na wejściu (wlocie) oraz na wyjściu (wylocie)
siłownika.
Dławienie na wejściu siłownika. Aby uprościć rozważania, załóżmy, że w pewnym
przedziale czasu tłok porusza się ze stałą prędkością, a różnica ciśnień w komorach siłownika
napełnianej i opróżnianej wynosi Δp = p - p
w
= const. Niech w pewnej chwili siła oporu nagle się
zmniejszy. Tłok siłownika zareaguje na tę zmianę zwiększeniem prędkości. Ciśnienie p w komorze
napełnianej spadnie wskutek szybszego wzrostu jej objętości, a w komorze opróżnianej ciśnienie p z
tej samej przyczyny nieco wzrośnie. Ustali się nowa wartość między ciśnieniami Δp odpowiadająca
zmniejszonemu obciążeniu. Gdy podczas dalszego ruchu obciążenie wzrośnie, nowa różnica ciśnień
przyjmie wartość Δp
1
. Przy znacznym rozroście obciążenia tłok może nie tylko zwolnić, ale także
zatrzymać się na pewien czas, niezbędny do osiągnięcia potrzebnej wartości różnicy ciśnień.
Ponieważ przeciwciśnienie jest niewielkie, więc różnica ciśnień powodowana jest głównie zmianami
ciśnienia w komorze napełnianej, które zachodzą dość powoli wobec założonego dławienia na
wejściu.
Dławienie na wyjściu siłownika. W tym przypadku, ciśnienie w komorze napełnianej
zmienia się szybciej i. wskutek tego procesy przejściowe trwają krócej. Różnica ciśnień zmienia się w
przybliżeniu w równym stopniu wskutek zmian ciśnienia p i zmian przeciwciśnienia p
w
,. Wyższe niż
przy dławieniu na wejściu ciśnienie w komorze opróżnianej przyczynia się do zwiększenia płynności
ruchu tłoka. Natomiast pewną wadą dławienia na wyjściu jest znaczne wydłużenie czasu trwania
okresu przygotowawczego, bowiem decyduje o nim czas zmniejszania się ciśnienia w komorze
opróżnianej, który jest długi z powodu dławienia wypływu powietrza.
Za pomocą dwóch, zaworów dławiąco-zwrotnych, zainstalowanych na obu drogach przepływu
sprężonego powietrza od zaworu rozdzielającego do siłownika, można uzyskać nastawianie prędkości
ruchu tłoka w szerokim zakresie. Jednak praktycznie, ze względu na występowanie efektu drgań oraz
ze względu na trudności z utrzymaniem bardzo małej szczeliny w zaworze dławiącym (przekrój
szczeliny ze względu na zanieczyszczenie i oblodzenie zmienia się znacznie), minimalne prędkości
stosowane w typowych układach pneumatycznych nie przekraczają zazwyczaj 0,02-0,05 m/s. Jeżeli
wymagane są prędkości ruchu mniejsze, zaleca się stosować siłowniki pneumohydrauliczne lub
hydrauliczne. Układy pneumatyczne a dławieniem na wejściu i wyjściu podano na rys.1.27-1.50.
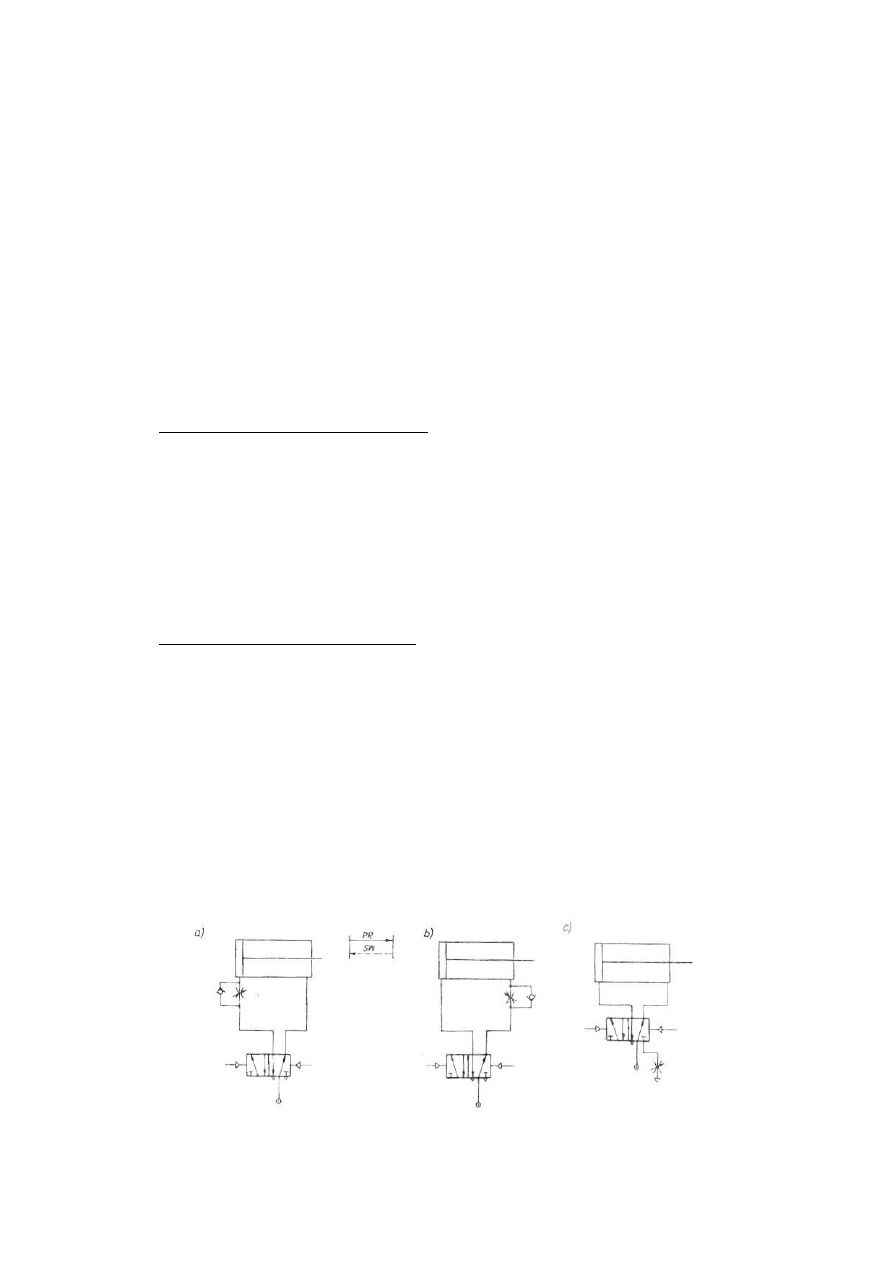
Rys.1.27. Pneumatyczne układy napędowe z zaworem dławiącym jednokierunkowym: a) na wejściu
(wlocie), b) i c) na wyjściu (wylocie)
W układach pokazanych na rys.1.27 dławienie przepływu sprężonego powietrza występuje
tylko przy ruchu tłoka do przodu (ruch roboczy PR), natomiast wycofanie tłoka odbywa się rucham
szybkim bez dławienia (szybkie wycofanie SW). Można do tego celu wykorzystać zawory dławiąc-
zwrotne (zawory dławiące jednokierunkowa) umieszczone na drodze przepływu sprężonego powietrza
między zaworem rozdzielającym i siłownikiem (rys.1.27a - dławienie na wlocie, rys.1.27b - dławienie
na wylocie) lub zawór dławiący dwukierunkowy umieszczony na
wyjściu do atmosfery z zaworu rozdzielającego (rys.1.27c dławienie
na wylocie).
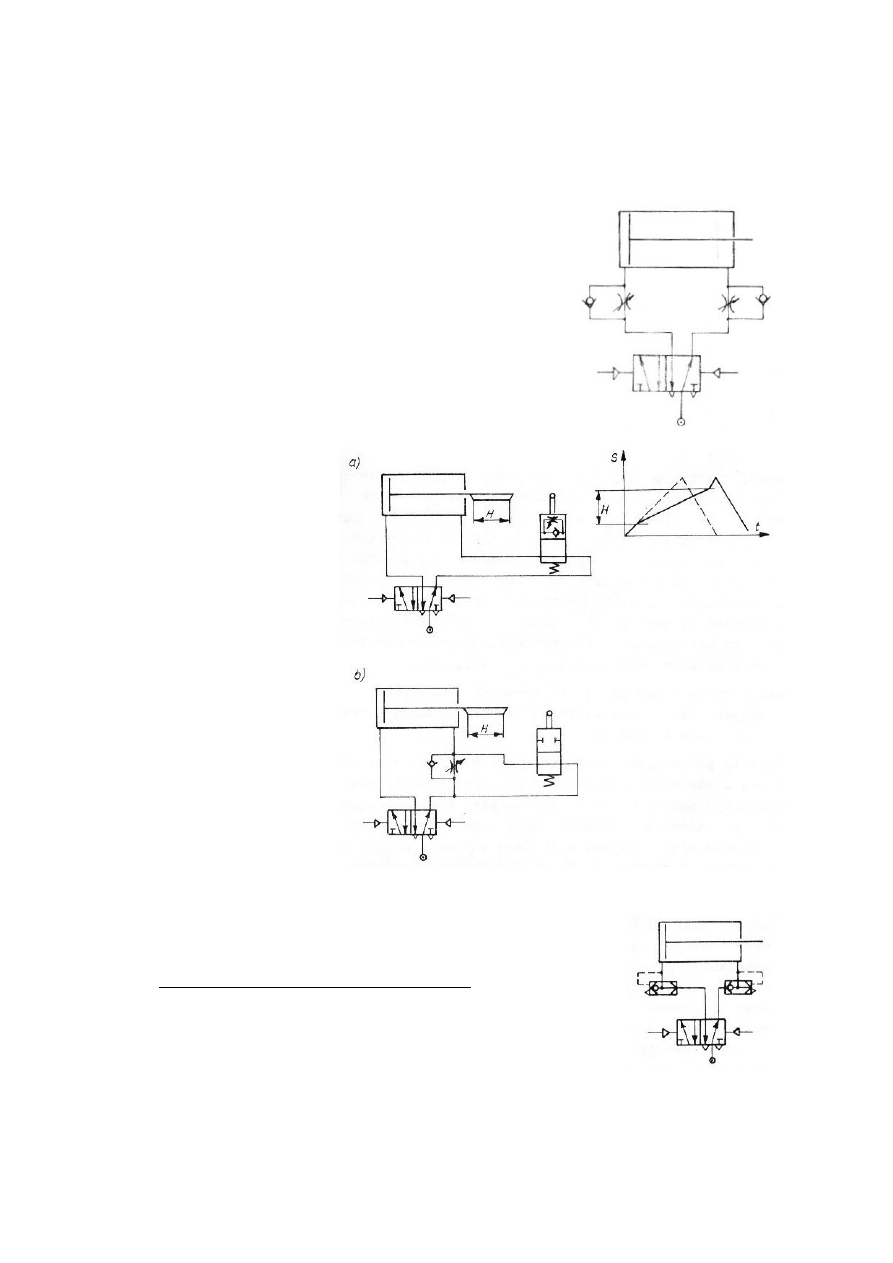
Rys.1.28. Pneumatyczny układ napędowy dwoma zaworami dławiącymi
jednokierunkowymi zamontowanymi na wlocie do siłownika
Na rysunku 1.28 pokazano układ, z dławieniem na wylocie
dla obu kierunków ruchu tłoka siłownika. Prędkości ruchu tłoka są
nastawiane za pomocą dwóch zaworów dławiąco-zwrotnych.
Układ ze zmianą prędkości ruchu tłoka na wybranym odcinku
jego skoku przedstawiono na rys.1.29a. W układzie tym
wykorzystano zawór dławiący normalnie otwarty sterowany
mechanicznie, który współpracuje z krzywką osadzoną na tłoczysku
siłownika. Długość krzywki H można dobierać zależnie od
wymaganego odcinka skoku
siłownika ze zmienioną prędkością
ruchu. Podobne zadanie spełnia
układ przedstawiony na rys.1.29b.
W układzie tym zamiast zaworu
dławiącego
sterowanego
mechanicznie występuje ręczny
zawór
dławiąco-zwrotny i
dwudrogowy zawór rozdzielający
sterowany mechanicznie.
Rys.1.29. Pneumatyczne układy napędowe
z nastawianiem różnych prędkości ruchu
tłoka na wybranym odcinku skoku: a) a
zaworem
dławiącym
sterowanym
mechanicznie, b) z zaworem dławiącym
ręcznym i zaworem rozdzielającym
dwudrogowym sterowanym mechanicznie
W celu uzyskania dużych
prędkości ruchu tłoka, szczególnie
wtedy gdy odległości między
siłownikami
i
zaworami
rozdzielającymi są duże, stosuje
się zawory szybkiego spustu jak
pokazano na rys.1.30. W układzie
tym zwiększenie prędkości ruchu
tłoka uzyskuje się przez skrócenie drogi wypływu sprężonego powietrza z komór siłownika do
atmosfery (wypływ do atmosfery z pominięciem zaworu rozdzielającego).
Rys.1.30, Pneumatyczny układ napędowy z dwoma zaworami szybkiego spustu do realizacji
dużych prędkości ruchu tłoka
Pneumohydrauliczne siłowniki napędowe są stosowane do
napędu ruchów posuwowych w obrabiarkach lub innych urządzeniach
technologicznych. Czynnikiem napędowym (roboczym) w tych siłownikach
jest sprężone powietrze, natomiast olej wykorzystywany jest do hamowania
ruchu tłoka. Obieg oleju jest obiegiem zamkniętym. Dzięki temu, do
sterowania i napędu tych siłowników stosuje się te same elementy
pneumatyczne co do zwykłych siłowników pneumatycznych. Prędkość ruchu roboczego wynosi
zazwyczaj 30-6000 nim/min, większa stabilność ruchu jest uzyskiwana przez zastosowanie regulatora
przepływu, który ma za zadanie utrzymanie stałego spadku ciśnień na zaworze dławiącym przy
zmianach obciążenia na tłoczysku siłownika. Stosowanie tylko zaworów dławiących nie pozwala na
utrzymanie stałej prędkości, gdyż:
•
prędkość ruchu tłoka zależy od wartości obciążenia;
•
przy małych przepływach szczeliny dławiące ulegają "zarastaniu" - powoduje to wzrost oporów
przepływu.
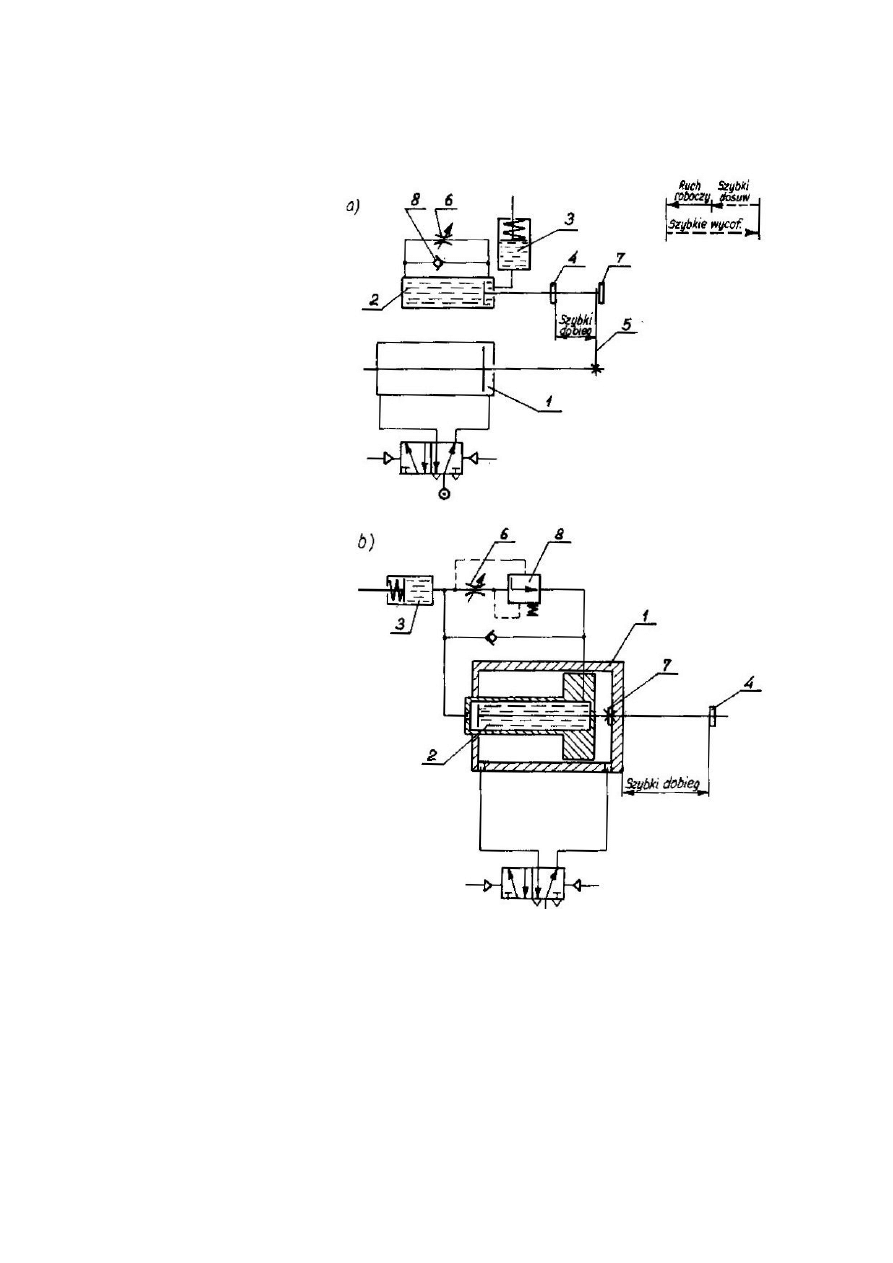
Rys.1.31. Pneumohydrauliczne układy
napędu posuwu: a) z zaworem
dławiącym, b) z regulatorem przepływu.
Siłownik pneumohydrauliczny
przedstawiony na rys.1.31a
składa się z siłownika
pneumatycznego napędowego
1, siłownika hydraulicznego
hamującego 2 oraz zbiornika
kompensacyjnego 3. Na
tłoczysku
siłownika
hydraulicznego 2 znajduje się
nastawny zderzak 4 ustalający
długość szybkiego dobiegu.
Szybki ruch tłoka w lewo trwa
do chwili, aż połączone a
tłoczyskiem
siłownika
pneumatycznego jarzmo 5
oprze się o nastawny zderzak 4.
Od tej chwili rozpoczyna się
również przesuw tłoka w
siłowniku hamującym 2.
Prędkość ruchu obu tłoków
(ruch roboczy) nastawia się
zaworem dławiącym 6. W
trakcie ruchu roboczego
tłoczysko wchodzi do wnętrza
siłownika hydraulicznego 2 i
niezbędne jest przetłoczenie
nadmiaru oleju do zbiornika
kompensacyjnego 3. Podczas
ruchu tłoka siłownika 1 w prawo
(szybkie wycofanie) jarzmo 5
opierając się o stały zderzak 7
wycofuje również tłok w
siłowniku hydraulicznym 2.
Wycofanie tłoka siłownika
hydraulicznego 2 jest szybkie,
gdyż przy tym kierunku ruchu,
olej przepływa przez zawór
zwrotny 8.
Na rys.1.31b przedstawiono siłownik pneumohydrauliczny ze współśrodkowym, wewnętrznym
siłownikiem hydraulicznym. Jego zaletą jest bardzo zwarta budowa oraz wyeliminowanie momentu
gnącego na tłoczysku (pochodzącego od siły hamującej). W odróżnieniu od poprzedniego rozwiązania
w miejsce zaworu dławiącego wstawiony jest regulator przepływu 8, co zapewnia wystarczającą
równomierność prędkości ruchu tłoka siłownika napędowego. Inne elementy siłownika
pneumohydraulicznego z rys.1.31b oznaczono identycznie jak na rys.1.31a
1.2. ANAUZA CYKLOGRAMU NAPĘDU PNEUMATYCZNEGO
Na rysunku 1.32 pokazano pneumatyczny układ napędowy z siłownikiem tłokowym dwustronnego
działania, w którym zachodzi jednocześnie napełnianie i opróżnianie komór, przy czym uwzględniono
zarówno wymianę ciepła między zawartością komory a otoczeniem, jak i przepływy powietrza między
komorami. Tłok siłownika obciążony jest siłami oporu P użytecznego i szkodliwego. Po przesterowaniu
zaworu rozdzielającego, powietrze z sieci kierowane jest przez odpowiedni kanał zaworu do lewej
komory siłownika, w której początkowo panowało ciśnienie atmosferyczne. Niezależnie od strat
sprężonego powietrza w komorze, którego pewna część może przez nieszczelności uchodzić do
atmosfery, ciśnienie w komorze zaczyna wzrastać. W tym czasie druga komora siłownika połączona
jest przez kanał zaworu rozdzielającego z atmosferą i ciśnienie powietrza w komorze, na początku
równe ciśnieniu panującemu w sieci, zaczyna się zmniejszać. Do komory tej wpływa także
stosunkowo niewielka ilość powietrza wskutek nieszczelności zaworu rozdzielającego i uszczelnień
tłoka siłownika, co jednak nie zmienia przebiegu procesu. Pod działaniem siły wywołanej różnicą
ciśnień w obu komorach siłownika tłok przemieszcza się w prawo, pokonując siły oporów P.
Urządzenie związane z tłoczyskiem siłownika wykonuje wtedy zabieg przewidziany procesem
technologicznym. Przy końcu skoku zawór rozdzielający zostaje przesterowany w drugie położenie,
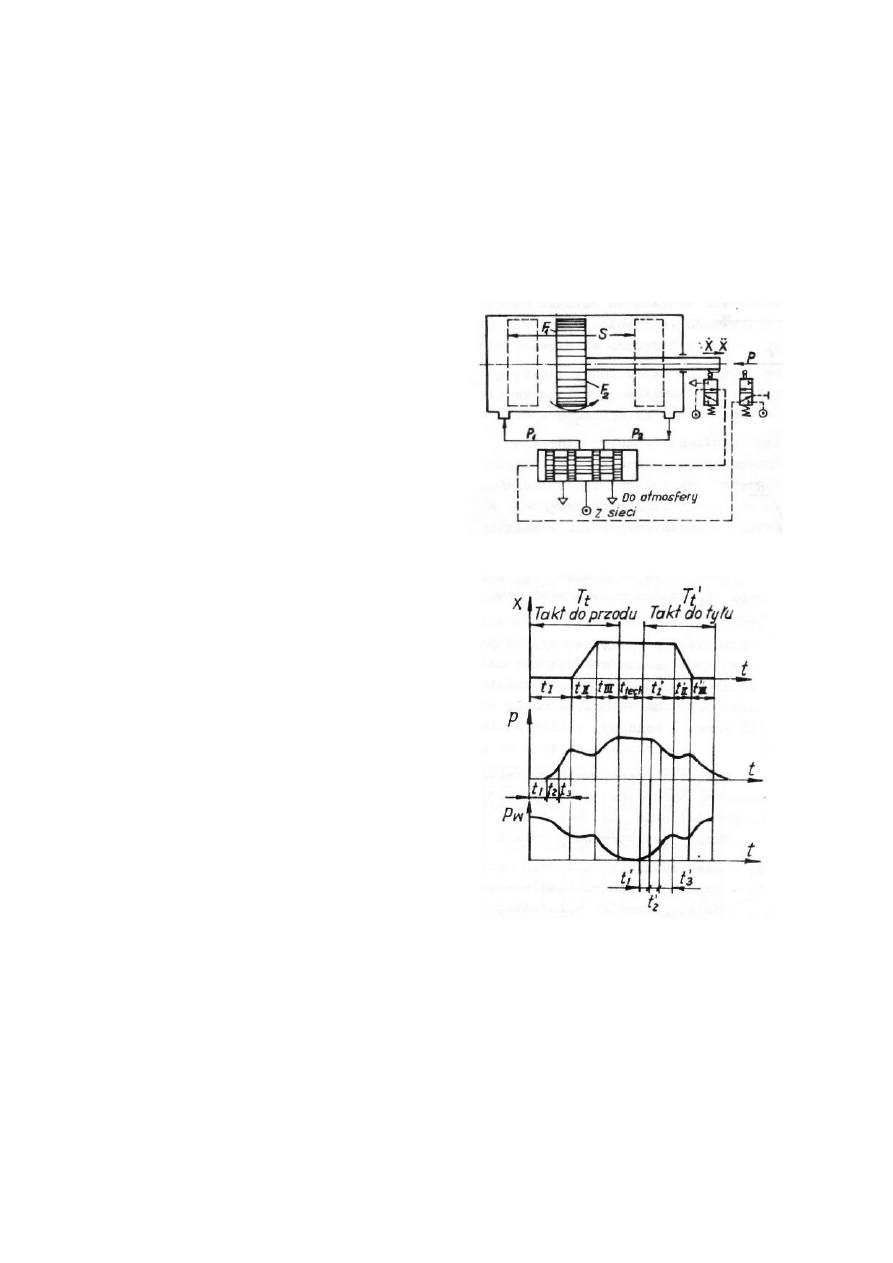
Rys.1.32. Typowy układ napędowy z pneumatycznym siłownikiem
dwustronnego działania
w którym prawa komora siłownika uzyskuje połączenie
z siecią i tłok wykonuje ruch powrotny. Wykres cyklu
roboczego (cyklogram) tego typu napędu
pneumatycznego podano na rys.1.33. Przy jego
analizie dogodne jest uwzględniać nie tylko czas ruchu
i postoju tłoka lecz także przedziały czasu, w których
zmienia się ciśnienie w komorach siłownika. Ruch.
sprężonego powietrza w przewodzie rozpoczyna się
tuz po rozpoczęciu otwierania zaworu rozdzielającego.
Dla uproszczenia można przyjąć, że fala ciśnienia
rozpoczyna ruch dopiero wtedy, gdy zawór jest otwarty
całkowicie. Założenie takie nie wprowadza większego błędu bowiem czas przesterowania zaworu
Rys.1.35. Wykres cyklu roboczego (cyklogram) siłownika
pneumatycznego
rozdzielającego jest bardzo niewielki w porównaniu z
czasem cyklu roboczego. Z cyklogramu widać, że do
chwili rozpoczęcia przez tłok ruchu, ciśnienie w
komorze roboczej wzrasta, a w opróżnionej maleje. W
czasie ruchu tłoka krzywe ciśnień w komorach
siłownika mogą mieć różny przebieg, zależnie od
czynników konstrukcyjnych i pneumatycznych układu.
Ciśnienia mogą zatem monotonicznie rosnąć lub
maleć, albo nawet mieć charakter oscylacyjny. Po
zakończeniu ruchu tłoka ciśnienie w komorze
połączonej z siecią wzrasta do wartości niezbędnej z
przyczyn technologicznych. Jednocześnie w drugiej
komorze siłownika ciśnienie maleje do wartości
ciśnienia atmosferycznego. Chwile zakończenia
procesów zmian ciśnienia v obu komorach na ogół nie
pokrywają się. Po wykonanej zadanej czynności
technologicznej zawór rozdzielający zostaje
przesterowany i w opisanej kolejności, rozpoczyna się
powrotny ruch tłoka.
Czas taktu, do przodu T
t
(rys.1.33) i czas taktu powrotnego T'
t
można rozpatrywać jako sumę
czasów trwania trzech okresów:
I okres - przygotowawczy, od początku przesterowania elementu sterującego do chwili ruszenia tłoka;
II okres - ruchu tłoka, w czasie którego tłok przemieści się na odległość równą skokowi,
III okres - końcowy, w którym ciśnienie powietrza w komorze roboczej wzrasta do potrzebnej wartości.
Składniki czasu każdego taktu, odpowiadające powyższym okresom, oznaczone są na rys.1.33 przez
t
I
, t
II
, t
III
(ruch do przodu) oraz t'
I
, t'
II
, t'
III
(ruch powrotny).
Okres przygotowawczy dziali się z kolei na:
t
1 -
czas zadziałania zaworu rozdzielającego,
t
2 -
Czas rozprzestrzeniania się fali ciśnienia od zaworu rozdzielającego do siłownika,
t
3 -
czas wzrostu ciśnienia w komorze roboczej siłownika do chwili ruszenia tłoka.
W siłownikach przemieszczających (transportujących) najistotniejszy jest czas ruchu tłoka t
II,
natomiast w siłownikach mocujących największe znaczenie ma czas t
III.
Jak widać, w zależności od
przeznaczenia siłownika, różne okresy czasu w cyklogramie napędu pneumatycznego mogą być
najważniejsze.
Analityczne określenie prędkości ruchu tłoka wymaga przeprowadzenia analizy modelu
fizycznego siłownika pneumatycznego, który określa zjawiska związane z napełnianiem i
opróżnianiem komór o zmiennej objętości z uwzględnieniem wymiany ciepła ze środowiskiem
otaczającym oraz upływami powietrza przez nieszczelności. Matematyczny opis zmian ciśnienia i
temperatury w komorach siłownika otrzymuje się z bilansu energii powietrza zgromadzonego w
komorach i równań stanu gazu .
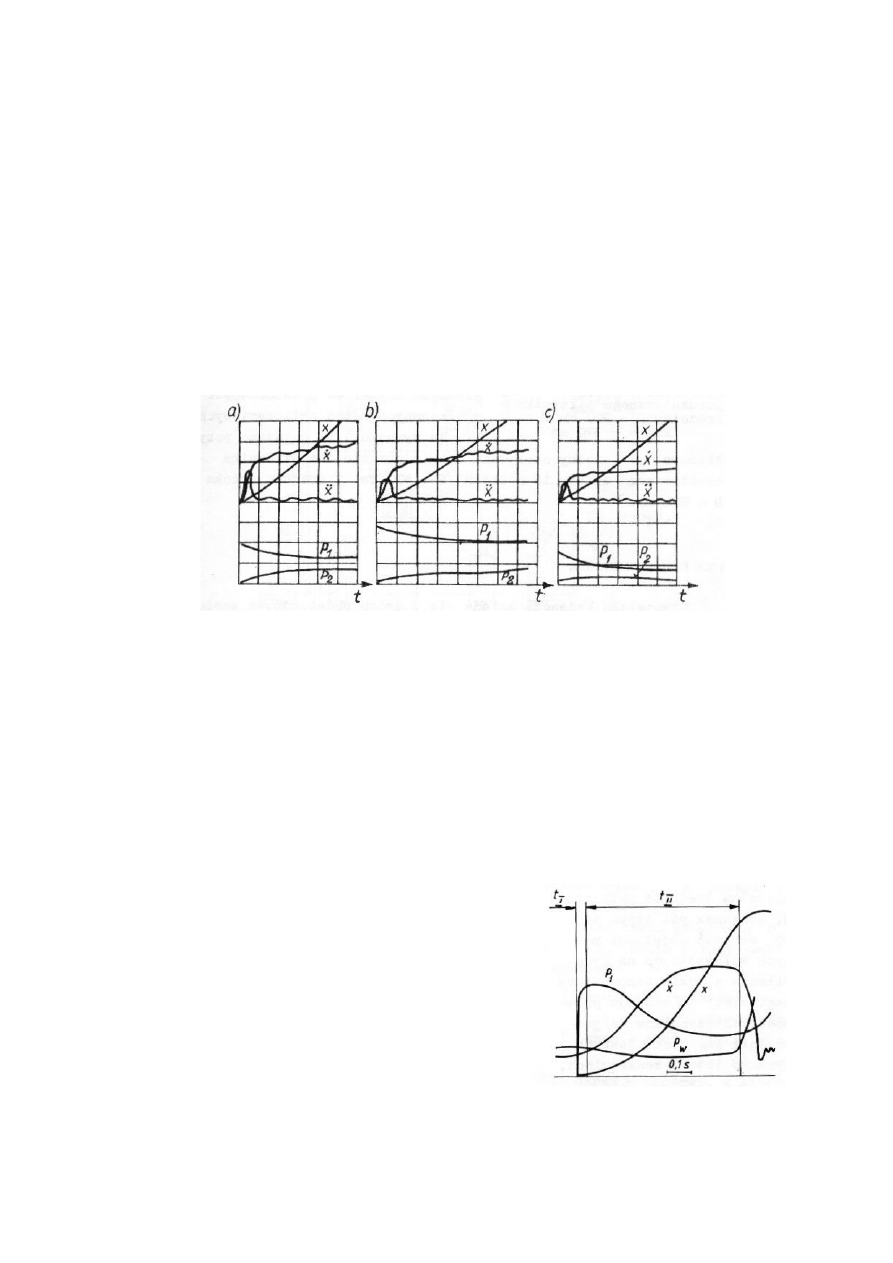
Rys.1.34. Wpływ obciążenia na dynamikę siłownika pneumatycznego: a) η = O,1; b) η = 0,5; c) η = 0,7
Na charakter ruchu tłoka siłownika ma wpływ szereg czynników, które można zaszeregować
jako czynniki konstrukcyjne i pneumatyczne. Do czynników konstrukcyjnych należą: średnica tłoka i
długość skoku siłownika, minimalne średnice przelotów linii napełniającej i opróżniającej, stosunek pól
tłoka od strony komory roboczej i opróżnianej, wartość objętości początkowej. Do czynników
pneumatycznych wpływających na dynamikę układu zaliczamy ciśnienie zasilania a także temperaturę
w komorach siłownika, której przebieg zależy od rodzaju przemiany termodynamicznej. Jednym z
istotnych czynników wpływających na czas (prędkość) przemieszczania się tłoka jest obciążenie
zewnętrzne tłoczyska. Na rysunku 1.34 przedstawiono, otrzymane na podstawie zależności
teoretycznych, przebiegi przemieszczenia x, prędkości dx/dy i przyspieszenia d
2
x/dt
2
tłoka,a także
ciśnień p
1
i p
2
w komorach siłownika dla trzech wartości obciążenia względnego a) η = O,1; b) η =
0,5; c) η = 0,7 gdzie η = P/p
1
* F
1
- p
2
* F
2
) rys.1.32). Ze wzrostem obciążenia obserwuje się dla
danego siłownika zmniejszenie maksymalnej prędkości tłoka, jednak wpływ ten jest istotny wtedy, gdy
η >= 0,5. zwiększenie obciążenia prowadzi do zmniejszenia się wahań prędkości, a silnie obciążony
siłownik charakteryzuje się praktycznie stałą prędkością na całej długości skoku.
Mimo rozwoju teorii napędów pneumatycznych
doświadczalne metody ich badań nie tracą swego znaczenia,
bowiem w równaniach obliczeniowych występują
współczynniki, których wartości nożna określić jedynie
doświadczalnie. Ponadto badania doświadczalne umożliwiają
ocenę celowości niektórych podstawowych, założeń
poczynionych przy wyprowadzaniu równań, np. że procesy
zachodzące w układach pneumatycznych są quasi - ustalone,
że współczynnik natężenia przepływu oraz ciśnienie w sieci są
Rys.1.35. Oscylogram pracy pneumatycznego siłownika o średnicy D = 200
mm i stoku s = 570 mm
stałe, że w wielu przypadkach, zastosowań można pominąć
wpływ wymiany ciepła z otoczeniem itd. Weryfikacja doświadczalna jest więc jednym z głównych.
kryteriów prawidłowości opracowanych metod, obliczeniowych.
Na rysunku 1.35 pokazano przykładowe oscylogramy otrzymane doświadczalnie dla siłownika
dwustronnego działania o skoku s = 570 mm i średnicy tłoka D = 200 mm.
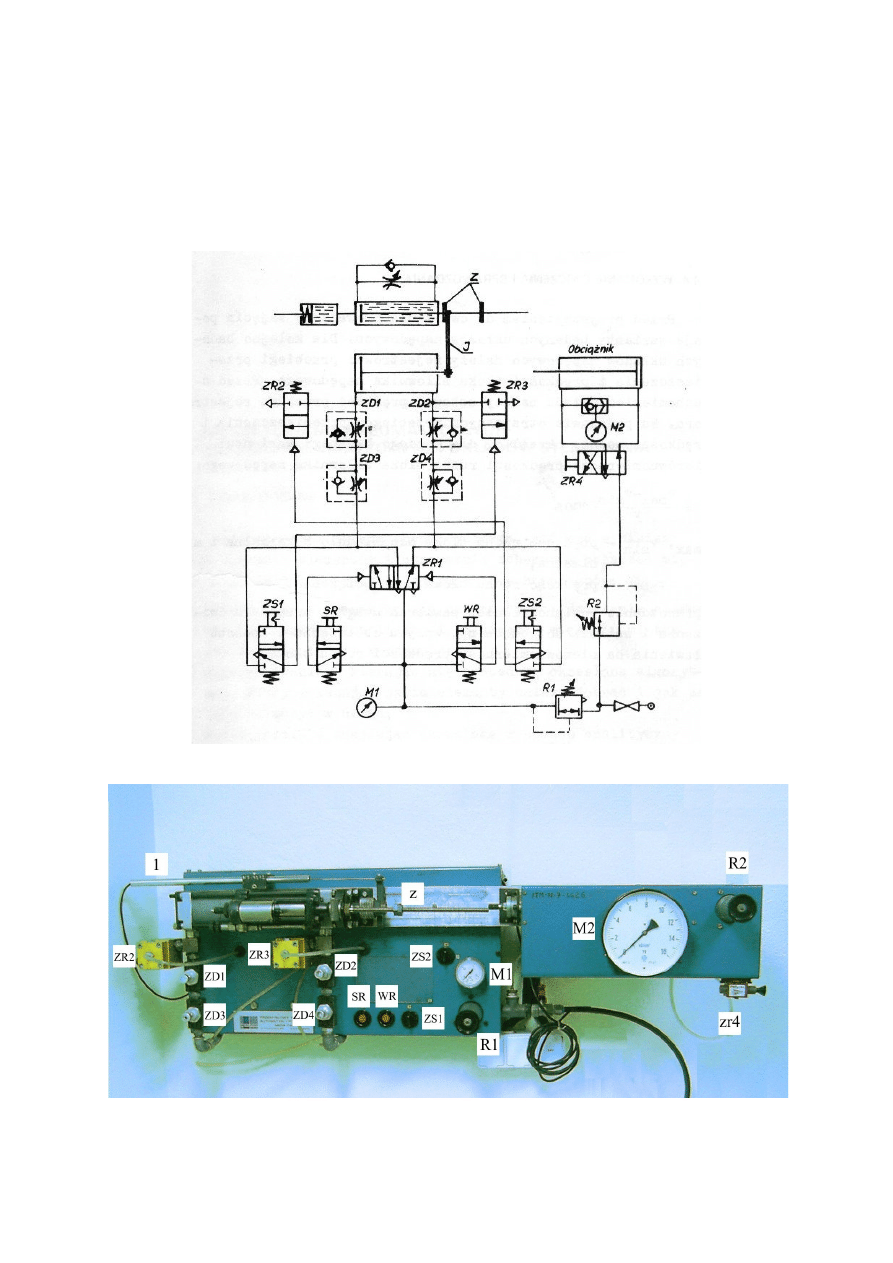
1.3. OPIS STANOWISKA
Stanowisko badawcze składa się z dwóch podstawowych zespołów;
1) badanego zespołu napędowego,
2) obciążnika pneumatycznego.
Rys.1.36. Schemat układu napędowego stanowiska badawczego
Rys.1.37. Widok układu napędowego stanowiska badawczego
Schematy pneumatyczne stanowiska badawczego podano na rys.1.36. Układ napędowy może
pracować jako układ czysto pneumatyczny lub jako układ z
hamowaniem hydraulicznym. Jest to uzależnione od położenia
zderzaków Z względem jarzma J związanego na stałe z
tłoczyskiem siłownika napędowego.
Rys.1.38. Widok stanowiska rejestracji przebiegów elektrycznych
Na każdej drodze przepływu sprężonego powietrza do siłownika
znajdują się po dwa zawory dławiąco-zwrotne ZD1-ZD4, które
umożliwiają ustawienie dowolnego wariantu dławienia. Zawory
ZR2 i ZR3 spełniają zadanie zaworów szybkiego spustu. Układ
napędowy może pracować z obciążeniem, którego wartość można
zmieniać za pomocą zaworu redukcyjnego R2. Jednocześnie
zawór ten utrzymuje stałą wartość ciśnienia (obciążenia) w trakcie
przesuwania tłoka obciążnika pod wpływem przemieszczającego
się tłoka siłownika napędowego. Zawór redukcyjny R1 umożliwia
nastawianie zadanej wartości ciśnienia sprężonego powietrza
dopływającego do siłownika napędowego. Za pomocą zaworów
SR i WR można sterować zaworem ZR1, który steruje ruchami
siłownika napędowego. Włączanie zaworów ZS1 i ZS2 powoduje
włączanie zaworów ZR2 i ZR3, które spełniają zadania zaworów
szybkiego spustu.
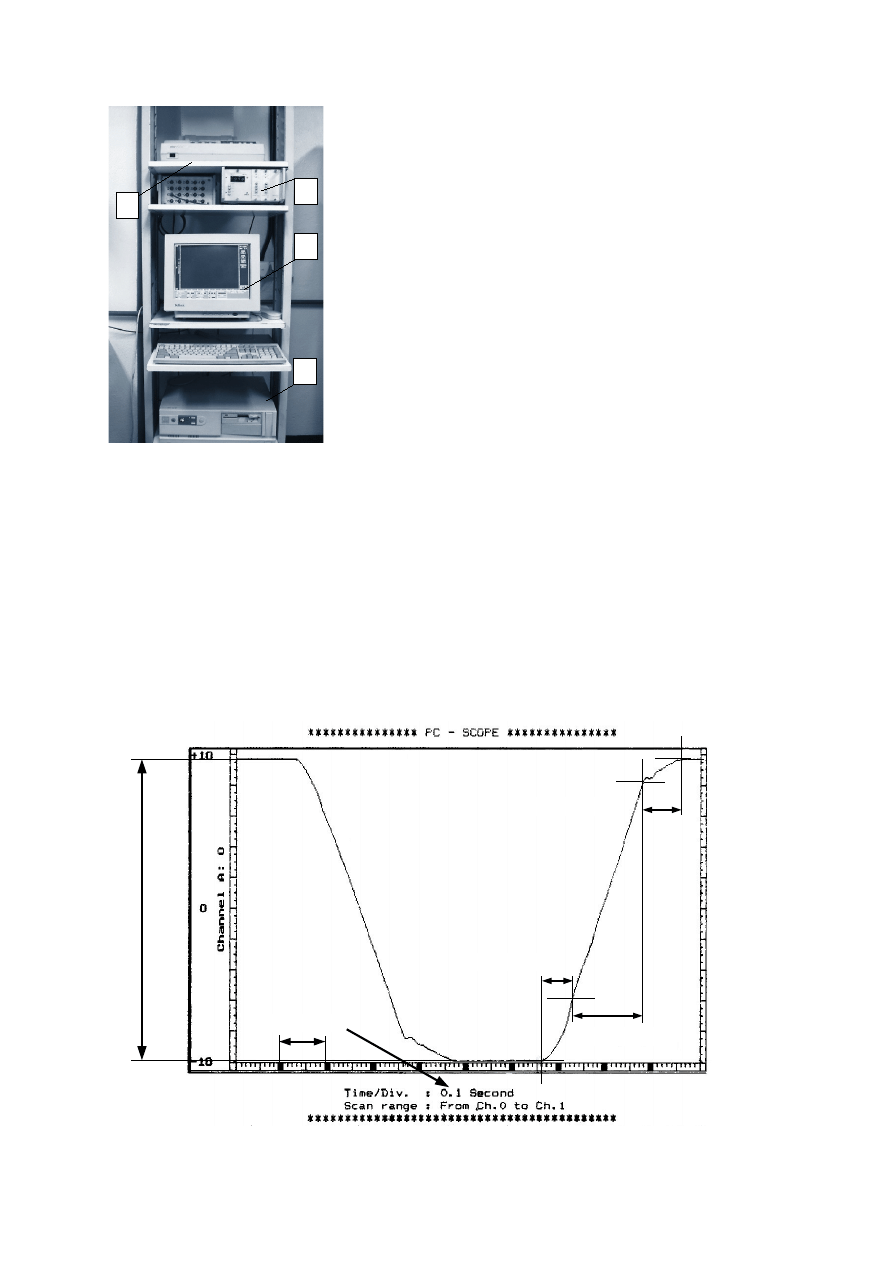
Tor pomiarowy składa się z :
•
Czujnika indukcyjnego przemieszczenia (poz.1 Rys.1.37).
•
Przetwornika pomiarowego (poz.1 Rys.1.38) znajdującego się na stanowisku komputerowym
(zdj.1.38). Przetwarza on sygnały z czujnika pomiarowego dostosowując poziomy napięć do
standardowych wartości ±10V.
•
Do rejestracji został użyty komputer PC (poz.2 Rys.1.38) wyposażony w kartę przetworników
analogowo-cyfrowych PLC812. Zainstalowany na PC program PC-Scope umożliwia
wizualizację na monitorze (3) i zapis przebiegów napięciowych, które doprowadzane są do
karty PCL812. Zarejestrowane przebiegi można wydrukować na drukarce (4).
Zmiana położenia tłoka siłownika powoduje powstanie zmian napięcia pochodzących z czujnika
drogi i po wzmocnieniu i dopasowaniu w czujniku przemieszczeń jest rejestrowana w programie PC-
Scope.
Rys. 1.39. Przykładowy przebieg ruchu tłoka siłownika zarejestrowany w programie PC-Scope.
Podstawa cz asu
S
ko
k
si
ło
w
n
ik
a
H
=
2
0
0
m
m
okres
roz p dz ania
ę
siłownika
okres ruchu
stabilnego
okres
hamowania
siłownika
1
2
3
4

1.4. WYKONANIE ĆWICZENIA l SPRAWOZDANIA
Przed, przystąpieniem do ćwiczenia prowadzący zajęcia podaje warianty badanych układów
napędowych. Dla kolejno badanych układów napędowych należy rejestrować przebiegi
przemieszczenia i prędkości tłoka siłownika napędowego. Przed uruchomieniem układu należy
skonfigurować w menu programu PC-Scope zakresy pomiarowe karty PCL812. Na podstawie
otrzymanych przebiegów przemieszczenia należy określić, dla każdego badanego wariantu, wartości
prędkości i nierównomierność prędkości ruchu tłoka siłownika napędowego.
Sprawozdanie powinno również zawierać uwagi o przebiegu ćwiczenia i wnioski dotyczące np, wpływu
obciążenia i sposobu dławienia na nierównomierność prędkości ruchu tłoka.
Wyszukiwarka
Podobne podstrony:
Politechnika Białostocka 02 Podstawowe pneumatyczne układy sterowania ręcznego
A2-3, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynieria kom
slajdy TIOB W27 B montaz obnizone temperatury, Przodki IL PW Inżynieria Lądowa budownictwo Politechn
Politechnika Warszawska
test z wydymałki, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wy
zagrożenia bhp przy robotach, Politechnika Warszawska, Organizacja Placu Budowy, Wykład
OPIS DROGI, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynier
EPS semestr VI, Politechnika Warszawska Wydział Transportu, Semestr VII, Eksploatacja Pojazdów Samoc
Irek, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Inżynieria kom
spr3asia, Przodki IL PW Inżynieria Lądowa budownictwo Politechnika Warszawska, Semestr 4, Wytrzymało
Politechnika Warszawska
więcej podobnych podstron