Politechnika Białostocka
Wydział Mechaniczny
Instrukcja do zajęć laboratoryjnych
Temat
ćwiczenia
:
Podstawowe pneumatyczne układy
sterowania ręcznego
Numer ćwiczenia: 2
Laboratorium z przedmiotu:
Napędy płynowe
Kod:
Opracował: mgr inż. Tomasz Huścio
mgr inż. Tomasz Kuźmierowski
Białystok 2004

Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową i działaniem pneumatycznych układów
sterowania ręcznego.
Zakres ćwiczenia:
1. Zapoznanie się z budową i zasadą działania poszczególnych elementów pneumatycznych
wykorzystywanych do budowy układów napędu i sterowania pneumatycznego będących
przedmiotem ćwiczenia.
2. Wykonanie połączeń i praktyczne sprawdzenie poprawności działania pneumatycznych
układów sterowania zamieszczonych w instrukcji.
3. Opracowanie schematów pneumatycznych układów sterowania dla podanych zadań.
4. Wykonanie połączeń i praktyczne sprawdzenie poprawności działania pneumatycznych
układów sterowania dla samodzielnie opracowanych schematów.
5. Sporządzenie sprawozdania z ćwiczenia.
6. Wykonanie sprawozdania z ćwiczenia.
Sprawozdanie powinno zawierać:
1.
Imiona, nazwiska, kierunek i rok studiów członków zespołu.
2. Temat
ćwiczenia.
3. Datę wykonania ćwiczenia.
4. Treść zadania.
5.
Schematy pneumatycznych układów sterowania dla podanych zadań kontrolnych.
6.
Opis działania + cyklogram pracy samodzielnie opracowanych schematów,
7.
Uwagi i spostrzeżenia.
Wymagania BHP pracy przy stanowiskach z tablicami montażowymi
Nie przekraczać wartości ciśnienia zasilającego
MPa
p
z
6
,
0
4
,
0
÷
=
.
Zabronione jest jakiekolwiek manipulowanie pokrętłem zaworu redukcyjnego
umiejscowionego w zespole przygotowania powietrza.
W przypadku samoczynnego odłączenia przewodu z gniazda dowolnego elementu układu
należy natychmiast odłączyć dopływ sprężonego powietrza do układu.
1. Wprowadzenie
Czynności sterowania ręcznego (siłą mięśni) w układach pneumatycznych dotyczą
obsługi zaworów rozdzielających. Sposób sterowania dowolnego zaworu rozdzielającego nie
zależy od funkcji czy budowy zaworu. Jednakowy rodzaj sterowania mogą posiadać zawory
2, 3, 4, czy 5- drogowe, zarówno 2 jak i 3- położeniowe. W tabeli 1 zestawiono podstawowe
sposoby sterowania siłą mięśni wg PN-ISO 1219.
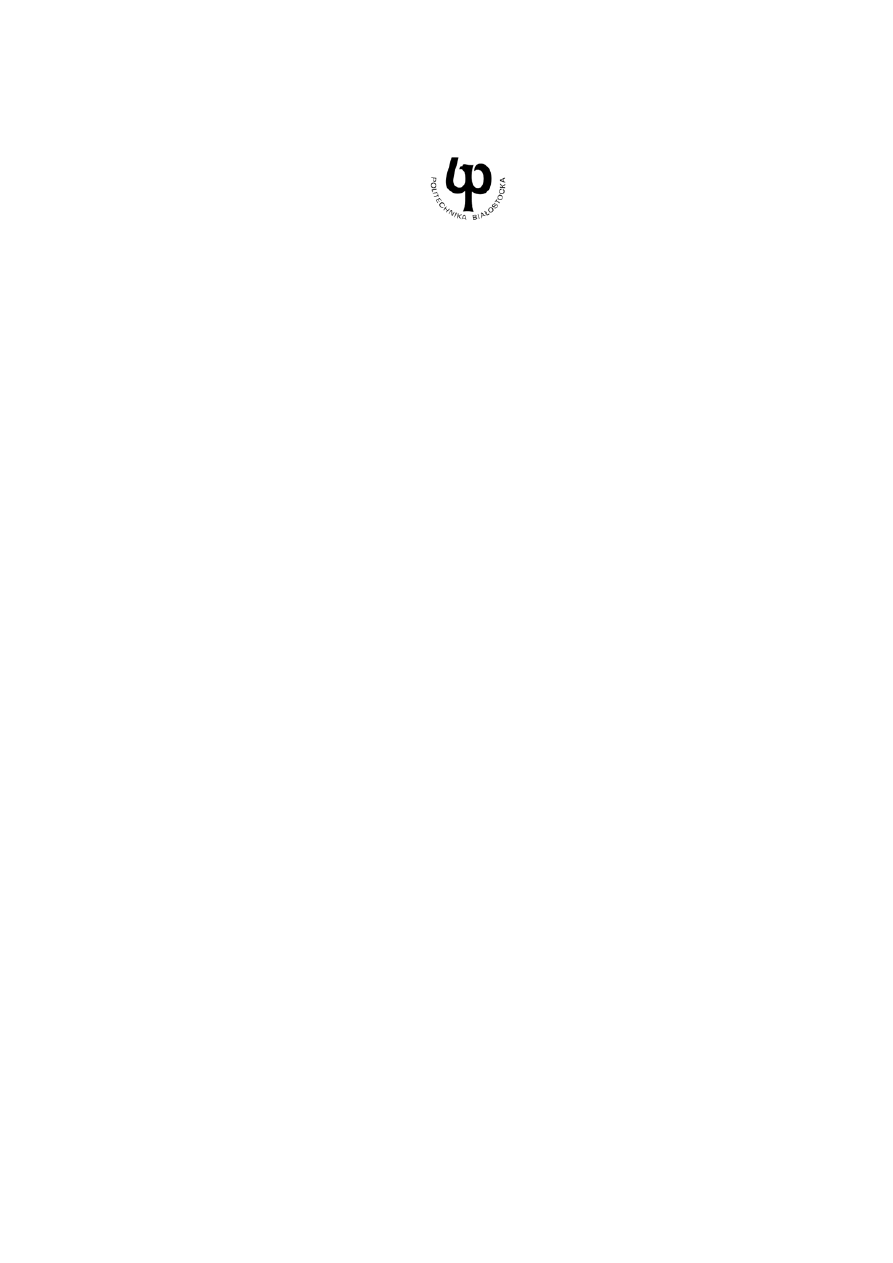
Symbol Określenie
symbol ogólny, bez wskazania sposobu
sterowania
przycisk wciskany
dźwignia
pedał
Tab. 1. Podstawowe sposoby sterowania siłą mięśni wg PN-ISO 1219
Sterowanie pneumatyczne może być realizowane poprzez zastosowania sterowania
bezpośredniego i sterowania pośredniego pracą siłownika jedno- lub dwustronnego działania.
Sterowanie bezpośrednie pracę siłownika pneumatycznego stosuje się w przypadkach, gdy
odległość między siłownikiem a stanowiskiem obsługi jest niewielka oraz mamy do czynienia
z siłownikami o małych gabarytach (małe objętości komór).
Sterowanie pośrednie stosuje się do sterowania dużymi siłownikami przy znacznej odległości
między siłownikiem a stanowiskiem obsługi. Dzięki umieszczeniu zaworu głównego
w pobliżu siłownika ulegają skróceniu przewody zasilające, przez co zmniejsza się przestrzeń
martwa między zaworem a siłownikiem. Prowadzi to do znacznie mniejszych strat energii.
Sterowanie pośrednie pracą siłownika jedno- lub dwustronnego działania może być
realizowane poprzez zastosowanie mono- lub bistabilnego zaworu głównego.
Zawór rozdzielający monostabilny pozostaje tak długo przesterowany, jak długo
podtrzymywane jest sterowanie (np. wciśnięty przycisk). Po zwolnieniu sterowania zawór
samoczynnie powraca do położenia wyjściowego.
Przykładem zaworu monostabilnego jest zawór rozdzielający trójdrogowy dwupołożeniowy
sterowany przyciskiem, powrót pod działaniem sprężyny.
Zawór rozdzielający bistabilny jest to element o dwóch stanach stabilnych położenia:
odcinającym i otwierającym przepływ czynnika (powietrza), wymagający odpowiedniego
impulsu w celu przejścia z jednego stanu w drugi.
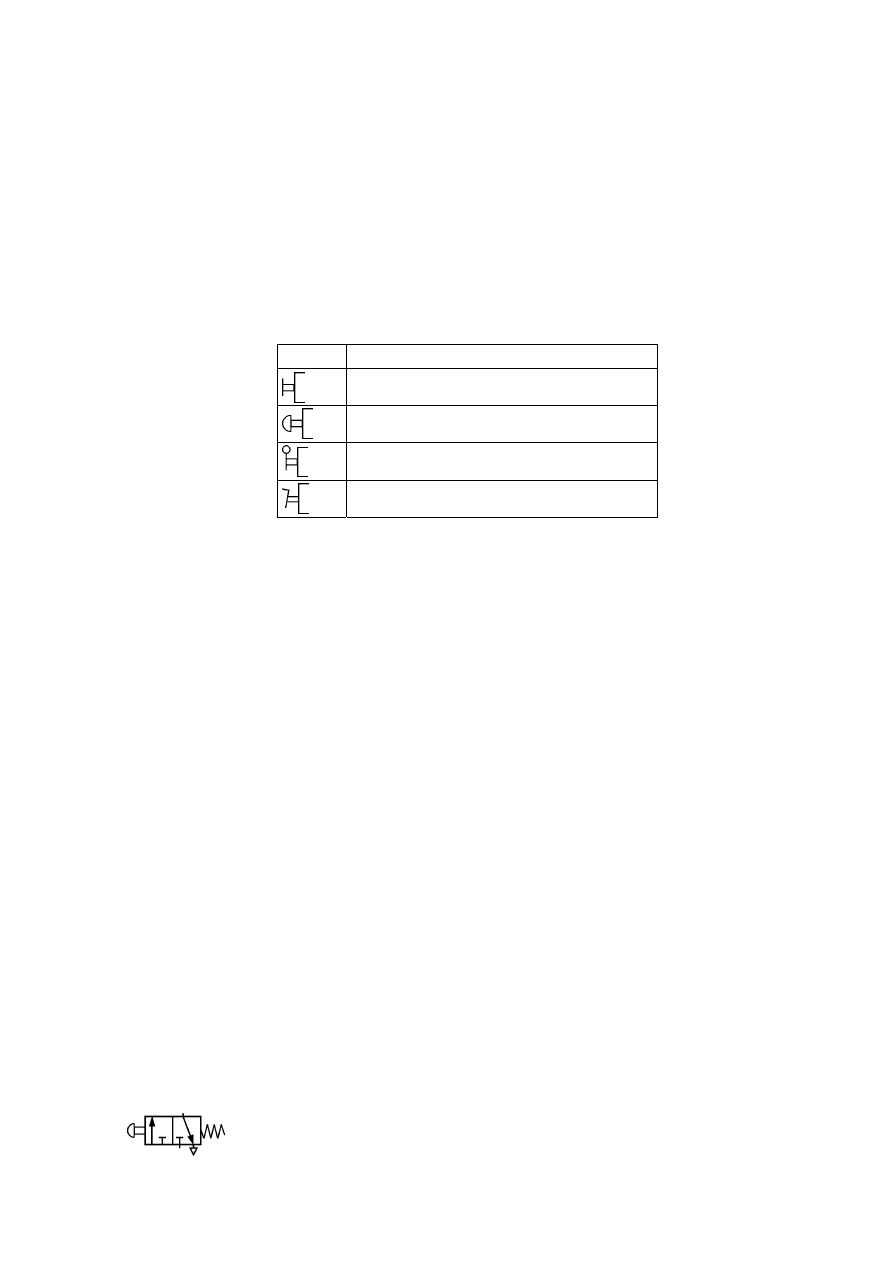
Przykładem zaworu bistabilnego jest zawór rozdzielający pięciodrogowy dwupołożeniowy
sterowany obustronnie pneumatycznie strumieniem napełniającym
2. Schematy podstawowych układów sterowania
Sterowanie bezpośrednie
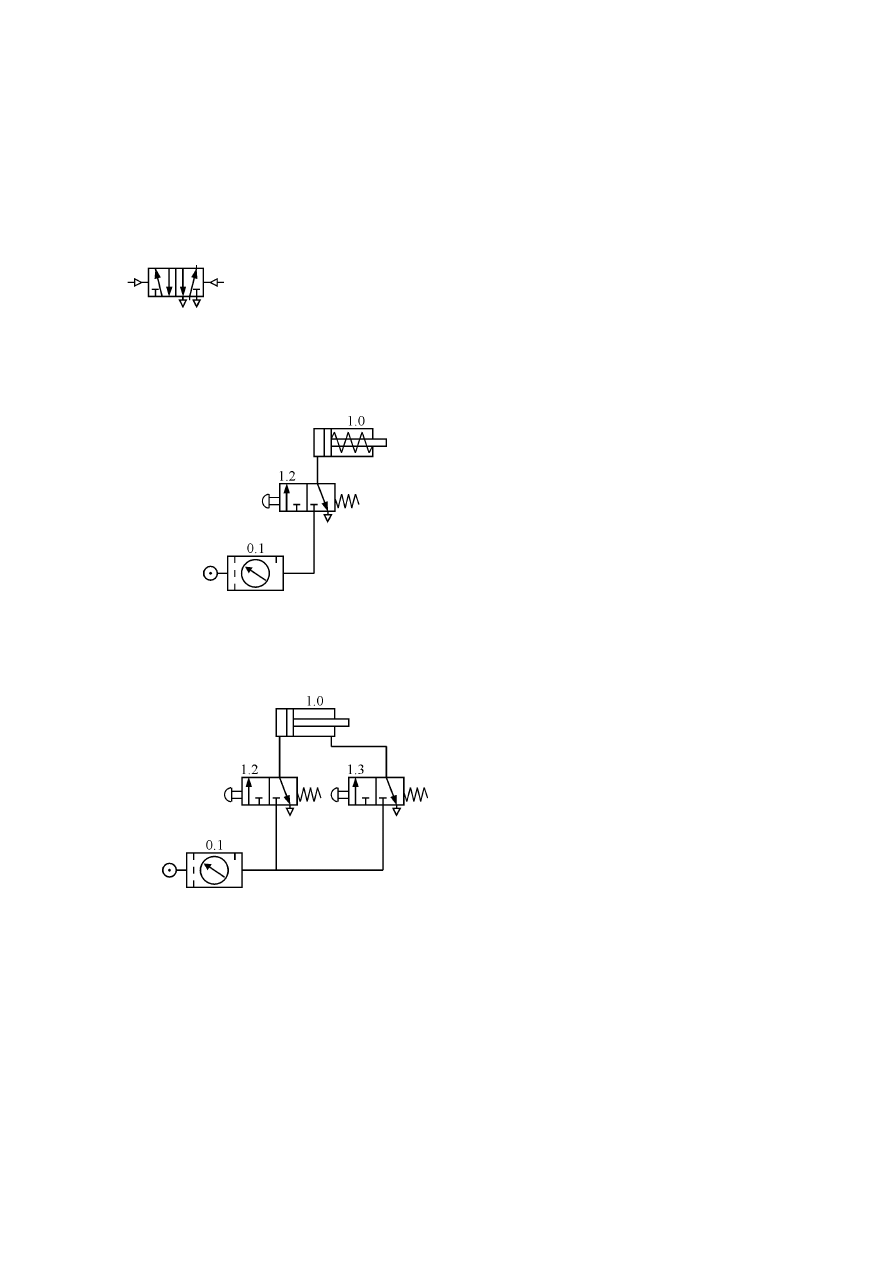
Rys. 1. Układ sterowania bezpośredniego siłownika
jednostronnego działania
Przedstawiony na rysunku 1 schemat układu zbudowany jest
z: 1.0 - siłownika jednostronnego działania; 1.2 - zaworu
rozdzielającego trójdrogowego dwupołożeniowego ze
sprężyną, sterowanego ręcznie przyciskiem.
Wciśnięcie i przytrzymanie przycisku zaworu rozdzielającego
(1.2) powoduje przepływ powietrza z bloku zasilania (0.1) do
komory siłownika (1.0). Wzrost ciśnienia w komorze
siłownika powoduje wysuw tłoczyska siłownika. Ruch
powrotny tłoczyska siłownika następuje po zwolnieniu
przycisku i powrocie zaworu rozdzielającego do położenia
wyjściowego pod wpływem działania sprężyny.
Rys. 2. Układ sterowania bezpośredniego siłownika
dwustronnego działania
Przedstawiony na rysunku 2 schemat układu zbudowany jest
z: 1.0 - siłownika dwustronnego działania; 1.2 i 1.3 - zaworów
rozdzielających trójdrogowych dwupołożeniowych ze
sprężyną, sterowanych ręcznie przyciskami.
Wciśnięcie i przytrzymanie przycisku zaworu rozdzielającego
(1.2) powoduje wysuw tłoczyska siłownika. Ruch powrotny
tłoczyska siłownika następuje po zwolnieniu przycisku zaworu
(1.2), wciśnięciu i przytrzymaniu przycisku zaworu
rozdzielającego (1.3).
Sygnały z zaworów rozdzielających (1.2) i (1.3) połączonych
bezpośrednio z siłownikiem umożliwiają przesunięcie
tłoczyska w obu kierunkach. Jednak w położeniach
krańcowych (wysunięte, cofnięte tłoczysko) przy zwolnionych
przyciskach tłok siłownika nie jest pod ciśnieniem i pod
działaniem sił zewnętrznych mógłby zmienić położenie.
Sterowanie pośrednie
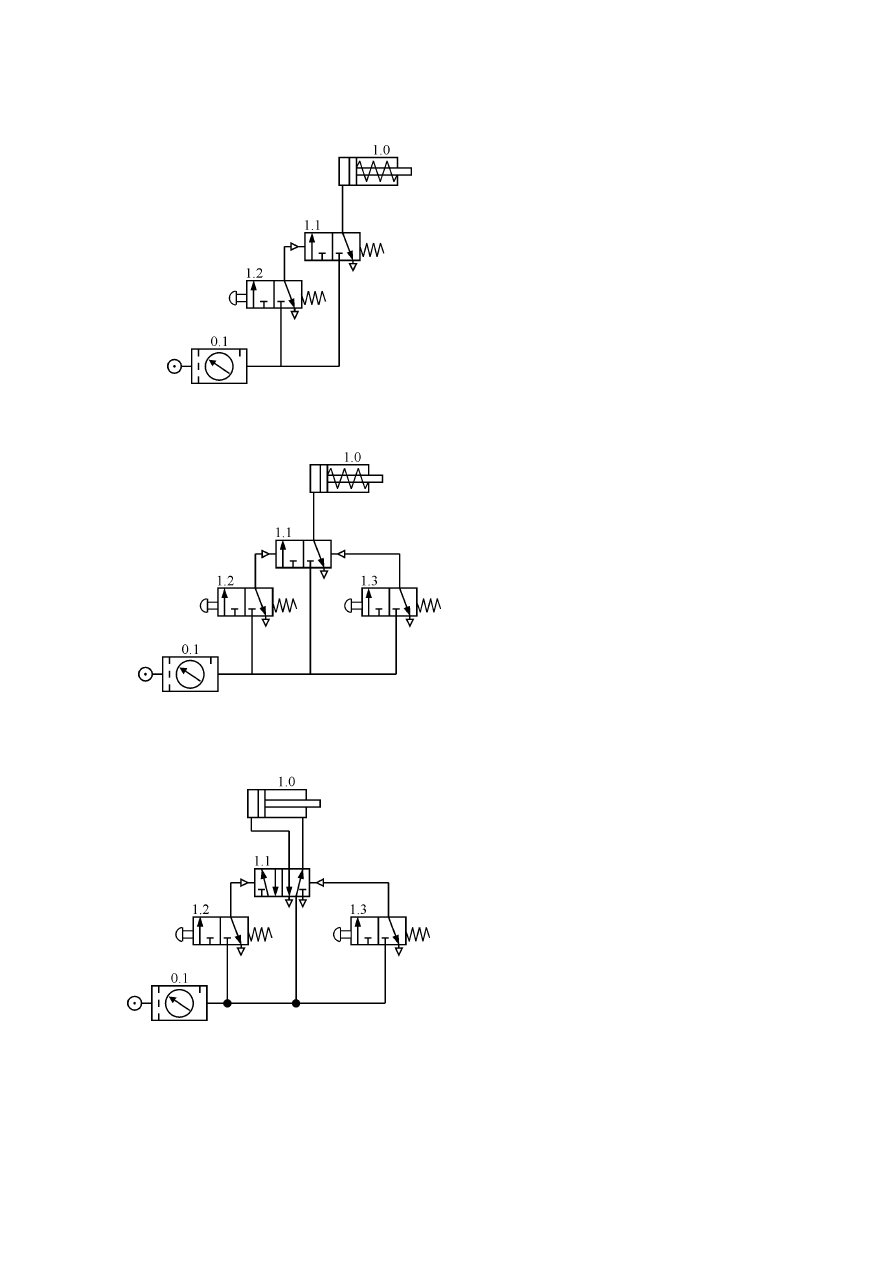
Rys. 3. Układ sterowania pośredniego siłownika
jednostronnego działania z monostabilnym
zaworem głównym
Przedstawiony na rysunku 3 schemat układu zbudowany jest z:
1.0 - siłownika jednostronnego działania; 1.1 – monostabilnego
zaworu głównego (zawór rozdzielających trójdrogowy
dwupołożeniowy sterowany pneumatycznie strumieniem
napełniającym, powrót pod działaniem sprężyny); 1.2 - zaworu
rozdzielającego trójdrogowego dwupołożeniowego ze sprężyną,
sterowanego ręcznie przyciskiem.
Wciśnięcie i przytrzymanie przycisku zaworu rozdzielającego
(1.2) powoduje przesterowanie zaworu głównego (1.1)
i przepływ powietrza z bloku zasilania (0.1) do komory
siłownika (1.0). Wzrost ciśnienia w komorze siłownika
powoduje wysuw tłoczyska siłownika. Ruch powrotny tłoczyska
siłownika następuje po zwolnieniu przycisku i powrocie, w
pierwszej kolejności, zaworu rozdzielającego (1.2) następnie
zaworu głównego (1.1) do położenia wyjściowego pod
wpływem działania sprężyn.
Rys. 4. Układ sterowania pośredniego siłownika
jednostronnego działania z bistabilnym
zaworem głównym
Przedstawiony na rysunku 4 schemat układu zbudowany jest z:
1.0 - siłownika jednostronnego działania; 1.1 – bistabilnego
zaworu głównego (zawór rozdzielających trójdrogowy
dwupołożeniowy sterowany obustronnie pneumatycznie
strumieniem napełniającym); 1.2 i 1.3 - zaworów
rozdzielających trójdrogowych dwupołożeniowych ze sprężyną,
sterowanych ręcznie przyciskami.
Krótkotrwałe wciśnięcie przycisku zaworu rozdzielającego (1.2)
powoduje przesterowanie zaworu głównego (1.1) i przepływ
powietrza z bloku zasilania (0.1) do komory siłownika (1.0).
Wzrost ciśnienia w komorze siłownika powoduje wysuw
tłoczyska siłownika. Ruch powrotny tłoczyska siłownika
następuje po krótkotrwałym wciśnięciu przycisku zaworu
rozdzielającego (1.3). Spowoduje to przesterowanie zaworu
głównego (1.1) do położenia wyjściowego.
Rys. 5. Układ sterowania pośredniego siłownikiem
dwustronnego działania z bistabilnym
zaworem głównym
Przedstawiony na rysunku 5 schemat układu zbudowany jest z:
1.0 - siłownika dwustronnego działania; 1.1 – bistabilnego
zaworu głównego (zawór rozdzielający pięciodrogowy
dwupołożeniowy sterowany obustronnie pneumatycznie
strumieniem napełniającym); 1.2 i 1.3 - zaworów
rozdzielających trójdrogowych dwupołożeniowych ze sprężyną,
sterowanych ręcznie przyciskami.
Główny zawór rozdzielający współpracujący z siłownikiem jest
przesterowywany po krótkotrwałym wciśnięciu przycisku
zaworów rozdzielających (1.2) lub (1.3). Ruch tłoczyska
siłownika w przód i w tył następuje po wciśnięciu odpowiednio
przycisków (1.2) i (1.3).
3. Zadania do wykonania
Zad.1. Siłownik dwustronnego działania sterowany jest za pomocą zaworu rozdzielającego
pięciodrogowego dwupołożeniowego (5/2) ze sprężyną powrotną, sterowanego
ręcznie przyciskiem. Narysuj schemat układu, oznacz wszystkie elementy.
Zad.2. Siłownik dwustronnego działania sterowany jest za pomocą monostabilnego
rozdzielacza pięciodrogowego dwupołożeniowego. Narysuj schemat układu, oznacz
wszystkie elementy.
Wyszukiwarka
Podobne podstrony:
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
Politechnika Białostocka 05 Realizacja pneumatycznych układów sterowania sekwencyjnego
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
Politechnika Białostocka 04 Realizacja pneumatycznych układów sterowania z zaworami realizującymi
12 Podstawy automatyki Układy sterowania logicznego
Elektro-Pneumatyczne układy sterowania, Technikum, Technik Mechatronik, PUM, Sprawozdania
12 Podstawy automatyki Układy sterowania logicznego
Politechnika Białostocka 03 Układy sterowania umożliwiające zmianę parametrów ruchu tłoka
zasady zaliczeń PP IG, Politechnika Białostocka, ZiIP (PB), Semestr 1, Podstawy programowania, Progr
Politechnika Warszawska 02 Nierównomierność prędkości ruchów napędów pneumatycznych i pneumohydrau
na kolo, NAUKA, Politechnika Bialostocka - budownictwo, Semestr III od Karola, Podstawy Inżynierii K
więcej podobnych podstron