Politechnika Białostocka
Wydział Mechaniczny
Instrukcja do zajęć laboratoryjnych
Temat
ćwiczenia
:
Realizacja pneumatycznych układów
sterowania sekwencyjnego
Numer ćwiczenia: 5
Laboratorium z przedmiotu:
Napędy płynowe
Kod:
Opracował: mgr inż. Tomasz Huścio
mgr inż. Tomasz Kuźmierowski
Białystok 2004

Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z budową i działaniem pneumatycznych układów
sterowania sekwencyjnego oraz opanowanie opracowywania cyklogramów pracy układów
pneumatycznych.
Zakres ćwiczenia:
1. Zapoznanie się z budową i zasadą działania poszczególnych elementów pneumatycznych
wykorzystywanych do budowy układów napędu i sterowania pneumatycznego będących
przedmiotem ćwiczenia.
2. Wykonanie połączeń i praktyczne sprawdzenie poprawności działania pneumatycznych
układów sterowania zamieszczonych w instrukcji.
3. Opracowanie schematów pneumatycznych układów sterowania dla podanych zadań.
4. Wykonanie połączeń i praktyczne sprawdzenie poprawności działania pneumatycznych
układów sterowania dla samodzielnie opracowanych schematów.
5. Sporządzenie sprawozdania z ćwiczenia.
6. Wykonanie sprawozdania z ćwiczenia.
Sprawozdanie powinno zawierać:
1.
Imiona, nazwiska, kierunek i rok studiów członków zespołu.
2. Temat
ćwiczenia.
3. Datę wykonania ćwiczenia.
4. Treść zadania.
5.
Schematy pneumatycznych układów sterowania dla podanych zadań kontrolnych.
6.
Opis działania + cyklogram pracy samodzielnie opracowanych schematów,
7.
Uwagi i spostrzeżenia.
Wymagania BHP pracy przy stanowiskach z tablicami montażowymi
Nie przekraczać wartości ciśnienia zasilającego
MPa
p
z
6
,
0
4
,
0
÷
=
.
Zabronione jest jakiekolwiek manipulowanie pokrętłem zaworu redukcyjnego
umiejscowionego w zespole przygotowania powietrza.
W przypadku samoczynnego odłączenia przewodu z gniazda dowolnego elementu układu
należy natychmiast odłączyć dopływ sprężonego powietrza do układu.

1. Wprowadzenie
Do sterowania różnych urządzeń technologicznych stosowane są często układy
pneumatyczne zapewniające ściśle określoną kolejność (sekwencję) działania siłowników.
W odniesieniu do przyrządów i uchwytów obróbkowych, które na ogół są wyposażone
w kilka siłowników pneumatycznych, kolejność działania może dotyczyć takich czynności
jak:
- podawanie
przedmiotu,
- mocowanie
przedmiotu,
- dosunięcie przedmiotu do narzędzia,
- ruch roboczy narzędzia,
- wycofanie
narzędzia,
- odmocowanie
przedmiotu,
- wycofanie
podajnika.
Wymienione czynności, składające się na cykl pracy, mogą przebiegać :
- półautomatycznie (sterowanie półautomatyczne) – każdy cykl pracy jest inicjowany
przyciskiem START,
- automatycznie
(sterowanie automatyczne) – cykl pracy jest powtarzany samoczynnie.
Przy realizacji układów sterowania sekwencyjnego niezbędne jest zastosowanie
czujników sygnalizujących:
położenie – wyłączniki drogowe (krańcówki),
czas – przekaźniki czasowe,
siłę (ewentualnie ciśnienie w siłowniku) – przekaźniki ciśnienia.
Wymienione elementy wprowadzają do układu sterowania tzw. sygnały wejściowe.
Wyróżnia się zatem następujące odmiany pneumatycznego sterowania sekwencyjnego:
- sterowanie
zależne od drogi,
- sterowanie
zależne od czasu,
- sterowanie
zależne od wartości ciśnienia.
W celu obrazowego opisu działania złożonych układów sterowania sekwencyjnego
sporządza się cyklogram pracy. Cyklogram pracy układu pneumatycznego przedstawia ruchy
elementów wykonawczych (siłowników) w kolejnych taktach (krokach), na które jest
podzielony cykl pracy. Na rysunku 1 przedstawiono przykładowy cyklogram pracy dwóch
siłowników pneumatycznych (1.0 i 2.0).
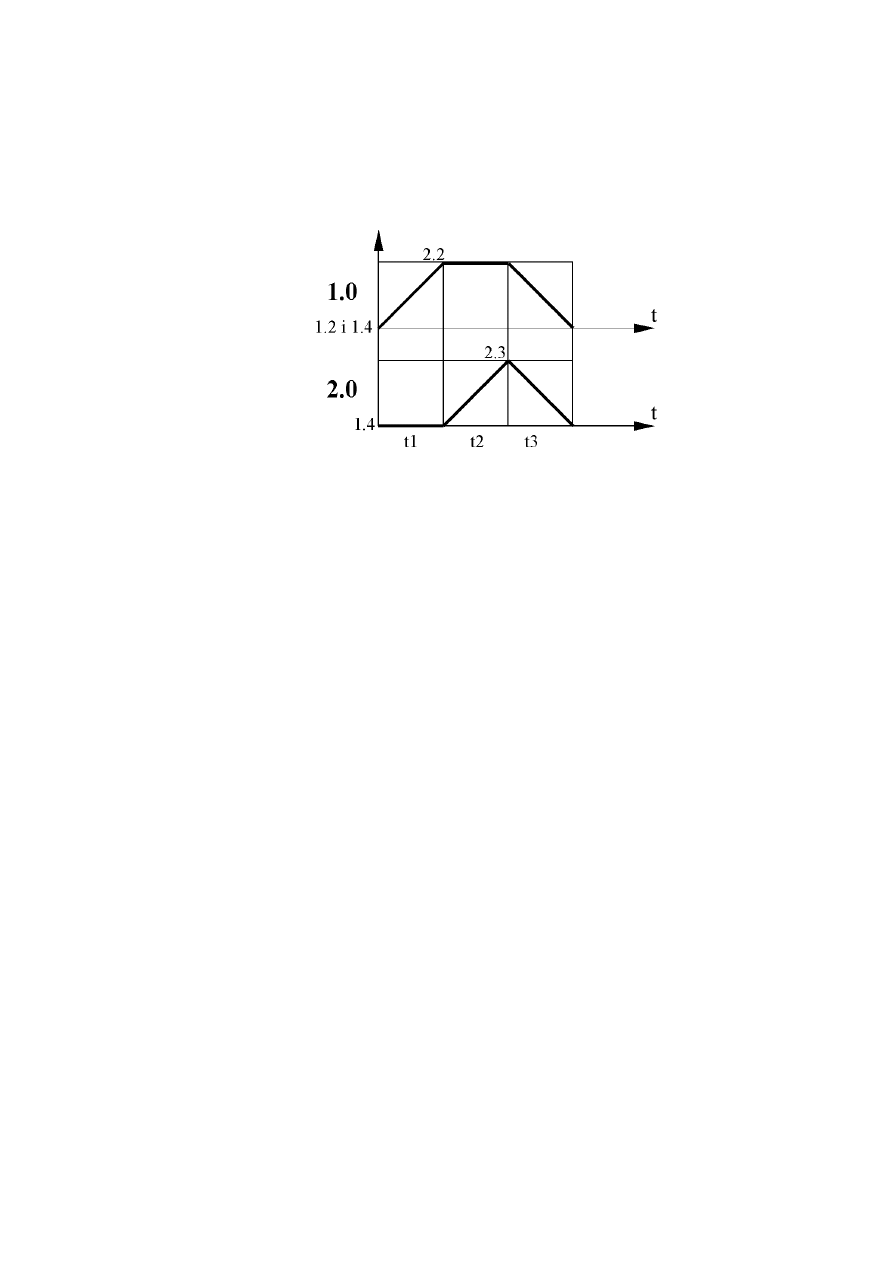
Rys. 1. Cyklogram pracy dwóch siłowników pneumatycznych
Cykl pracy na przedstawionym cyklogramie składa się z trzech taktów (t1, t2, t3). Określone
odcinki współrzędnej czasu nie odpowiadają rzeczywistym czasom działania elementów
wykonawczych. Pogrubione, poziome linie oznaczają stany stabilne siłowników, zaś linie
pochyłe ruch (wysuw, cofnięcie) siłowników. Cyklogram może być uzupełniony o oznaczenia
elementów sterowania (np. 1.2, 1.4, 2.2, 2.3) w celu łatwiejszego odczytania, jakie sygnały
wejściowe podawane z wyłączników drogowych lub przycisków powodują ruch w kolejnym
takcie.
2. Układy sterowania półautomatycznego
A. Sterowanie w zależności od drogi
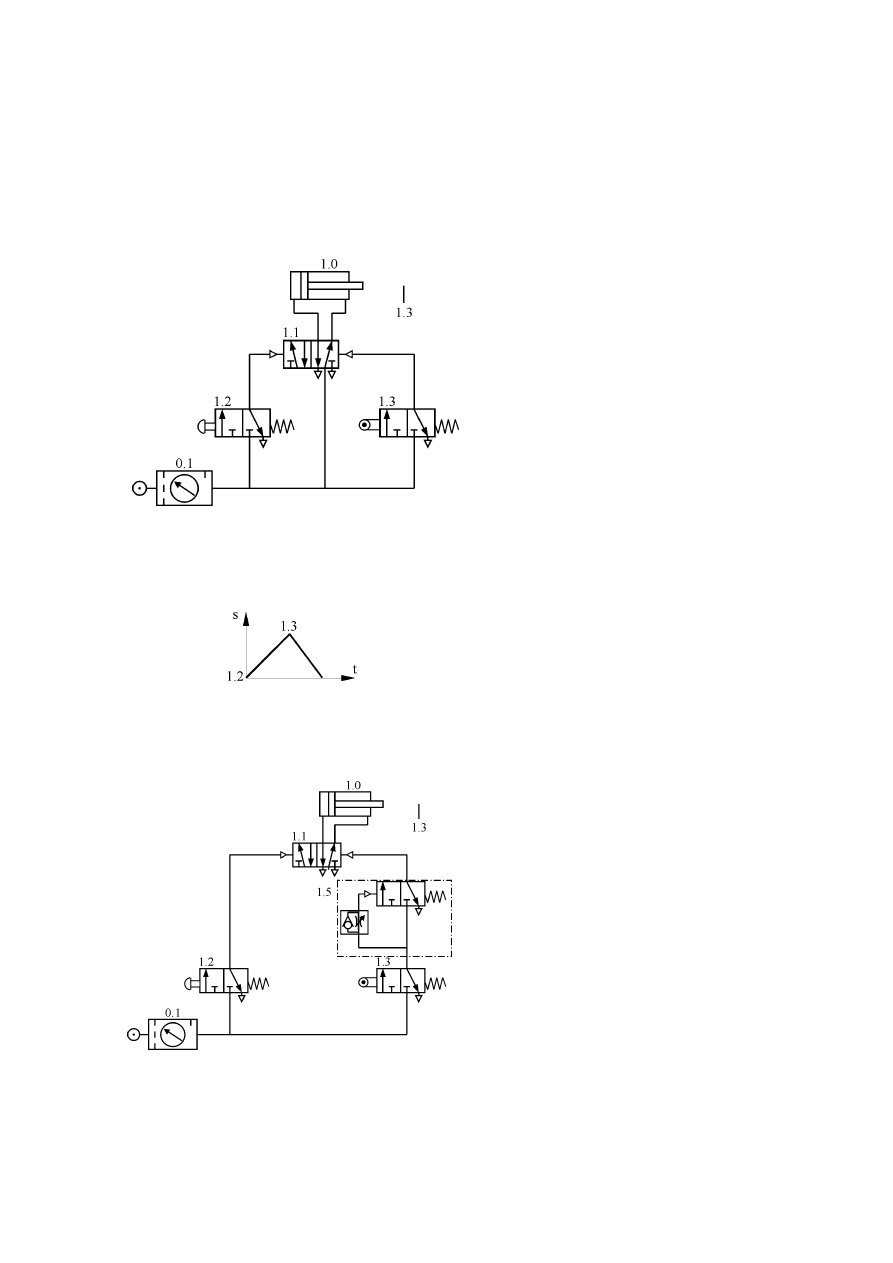
Rys. 2. Układ sterowania pośredniego siłownika
dwustronnego działania z wykorzystaniem
wyłącznika drogowego
cyklogram pracy
Przedstawiony na rysunku 2 schemat układu zbudowany jest
z: 1.0 – siłownika dwustronnego działania; 1.1 – bistabilnego
zaworu głównego (zawór rozdzielający pięciodrogowy
dwupołożeniowy sterowany obustronnie pneumatycznie
strumieniem napełniającym); 1.2 – zaworu rozdzielającego
trójdrogowego dwupołożeniowego ze sprężyną, sterowanego
ręcznie przyciskiem; 1.3 – wyłącznika drogowego (zawór
rozdzielający trójdrogowy dwupołożeniowy sterowany
mechanicznie dźwignią z rolką).
Krótkotrwałe wciśnięcie przycisku zaworu rozdzielającego
(1.2) powoduje przesterowanie zaworu głównego (1.1)
i przepływ powietrza z bloku zasilania (0.1) do komory
siłownika (1.0). Wzrost ciśnienia w komorze siłownika
powoduje wysuw tłoczyska siłownika. Ruch powrotny
tłoczyska siłownika następuje automatycznie po osiągnięciu
krańcowego położenia, w którym następuje przesterowanie
zaworu głównego (1.1) sygnałem z łącznika drogowego (1.3).
B. Sterowanie w zależności od czasu i drogi
Rys. 3. Układ sterowania pośredniego siłownika
dwustronnego działania z wykorzystaniem
elementu czasowego
Przedstawiony na rysunku 3 schemat układu zbudowany jest
z: 1.0 – siłownika dwustronnego działania; 1.1 –
bistabilnego zaworu głównego (zawór rozdzielający
pięciodrogowy dwupołożeniowy sterowany obustronnie
pneumatycznie strumieniem napełniającym); 1.2 – zaworu
rozdzielającego trójdrogowego dwupołożeniowego ze
sprężyną, sterowanego ręcznie przyciskiem; 1.3 –
wyłącznika drogowego (zawór rozdzielający trójdrogowy
dwupołożeniowy sterowany mechanicznie dźwignią
z rolką); 1.5 – elementu czasowego (zawór dławiąco-
zwrotnego jednokierunkowego współpracujący z zaworem
rozdzielającym trójdrogowym dwupołożeniowym
sterowanym pneumatycznie strumieniem napełniającym)
Krótkotrwałe wciśnięcie przycisku zaworu rozdzielającego
(
)
d j
i
ł
(
)
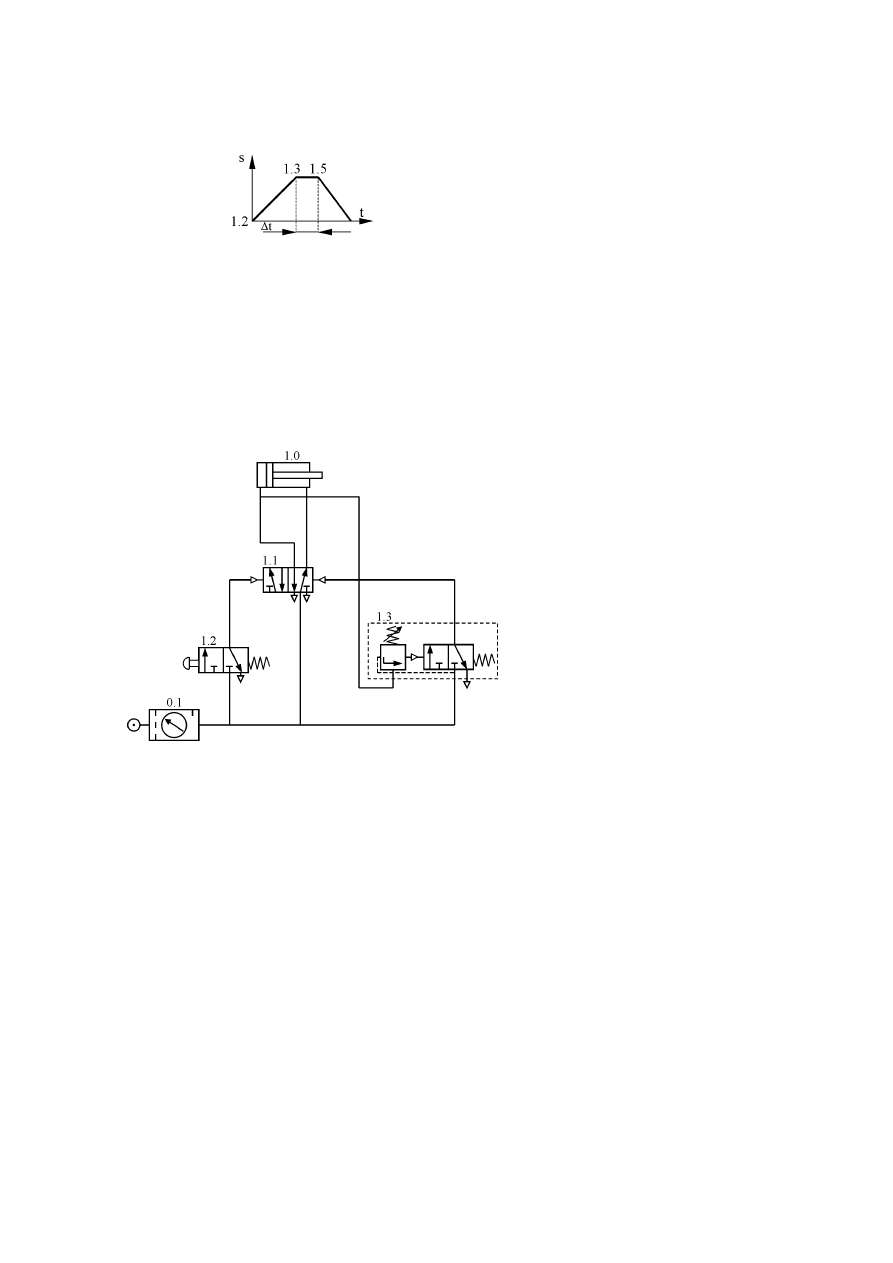
cyklogram pracy
(1.2) powoduje przesterowanie zaworu głównego (1.1)
i przepływ powietrza z bloku zasilania (0.1) do komory
siłownika (1.0). Wzrost ciśnienia w komorze siłownika
powoduje wysuw tłoczyska siłownika. Po osiągnięciu przez
tłoczysko siłownika krańcowego położenia kontrolowanego
przez wyłącznik drogowy (1.3) upływa określony czas
∆t
nastawiany pokrętłem zaworu dławiącego elementu
czasowego (1.5), po czym następuje przesterowanie
głównego zaworu rozdzielającego (1.1) i ruch powrotny
tłoczyska siłownika.
C. Sterowanie w zależności od ciśnienia
Rys. 4. Układ sterowania pośredniego siłownika
dwustronnego działania z wykorzystaniem zaworu
progowego
Przedstawiony na rysunku 4 schemat układu zbudowany
jest z: 1.0 – siłownika dwustronnego działania; 1.1 –
bistabilnego zaworu głównego (zawór rozdzielający
pięciodrogowy dwupołożeniowy sterowany obustronnie
pneumatycznie strumieniem napełniającym); 1.2 –
zaworu rozdzielającego trójdrogowego
dwupołożeniowego ze sprężyną, sterowanego ręcznie
przyciskiem; 1.3 – zaworu progowego z zaworem
rozdzielającym trójdrogowym dwupołożeniowym ze
sprężyną sterowanym pneumatycznie strumieniem
napełniającym.
Krótkotrwałe wciśnięcie przycisku zaworu
rozdzielającego (1.2) powoduje przesterowanie zaworu
głównego (1.1) i przepływ powietrza z bloku zasilania
(0.1) do komory siłownika (1.0). Wzrost ciśnienia
w komorze siłownika powoduje wysuw tłoczyska siłownika i przesłanie sygnału sterującego na zawór progowy (1.3).
Po osiągnięciu ciśnienia zadanego nastawianego pokrętłem zaworu progowego (1.3), następuje przesterowanie zaworu
rozdzielającego (1.3) współpracującego z zaworem progowym, po czym przesterowanie głównego zaworu
rozdzielającego (1.1) i ruch powrotny tłoczyska siłownika.
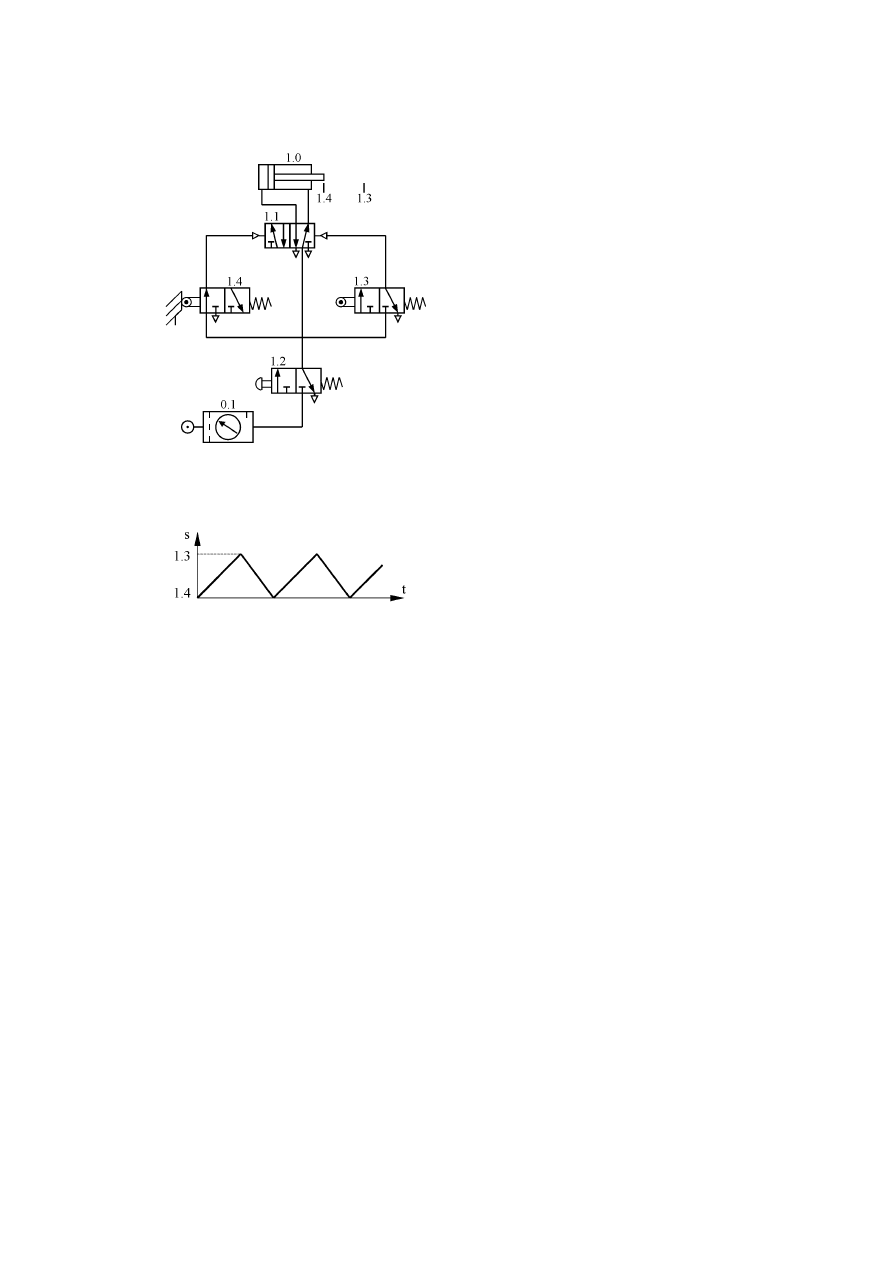
3. Układy sterowania automatycznego
Rys. 5. Układ realizujący ruch oscylacyjny tłoczyska
siłownika dwustronnego działania
cyklogram pracy
Przedstawiony na rysunku 5 schemat układu zbudowany jest
z: 1.0 - siłownika dwustronnego działania; 1.1 – bistabilnego
zaworu głównego (zawór rozdzielający pięciodrogowy
dwupołożeniowy sterowany obustronnie pneumatycznie
strumieniem napełniającym); 1.3 – wyłącznika drogowego
(zawór rozdzielający trójdrogowy dwupołożeniowy sterowany
mechanicznie dźwignią z rolką, normalnie zamknięty); 1.4 –
wyłącznika drogowego (zawór rozdzielający trójdrogowy
dwupołożeniowy sterowany mechanicznie dźwignią z rolką,
normalnie otwarty; 1.2 – zaworu rozdzielającego
trójdrogowego dwupołożeniowego ze sprężyną, sterowanego
ręcznie przyciskiem;
Krótkotrwałe wciśnięcie przycisku zaworu rozdzielającego
(1.2) powoduje na przemian wysuw i powrót tłoczyska
siłownika (1.0). Zatrzymanie tłoczyska siłownika następuje
po ponownym wciśnięciu przycisku zaworu rozdzielającego
(1.2).
Przedstawiony na rysunku 5 układ zapewnia ruch oscylacyjny tłoczyska siłownika bez
jednoznacznego położenia tłoczyska po zatrzymaniu. Usytuowanie zaworu rozdzielającego
trójdrogowego dwupołożeniowego ze sprężyną, sterowanego ręcznie przyciskiem (1.2) na
przewodzie zasilającym przełącznik drogowy 1.4 spowoduje, że tłoczysko siłownika po
wyłączeniu zatrzyma się w pozycji wsuniętej.
4. Zadania do wykonania
Zad.1. Powolny wysuw tłoczyska siłownika dwustronnego działania następuje po wciśnięciu
przycisku zaworu rozdzielającego trójdrogowego dwupołożeniowego. Automatyczny
szybki powrót tłoczyska siłownika następuje po osiągnięciu położenia krańcowego.
Narysuj schemat układu, oznacz wszystkie elementy. Narysuj cyklogram pracy układu
sterowania.
Zad.2. Szybki wysuw tłoczyska siłownika dwustronnego działania następuje po wciśnięciu
jednego lub obu przycisków zaworów rozdzielających trójdrogowych
dwupołożeniowych (1.2), (1.4). Automatyczny powolny powrót tłoczyska siłownika
następuje po osiągnięciu położenia krańcowego. Narysuj schemat układu, oznacz
wszystkie elementy. Narysuj cyklogram pracy układu sterowania.
Zad.3. Opracować układ sterowania realizujący ruch oscylacyjny tłoczyska siłownika
dwustronnego działania, ustalający położenie krańcowe. Narysuj schemat układu,
oznacz wszystkie elementy. Narysuj cyklogram pracy układu sterowania.
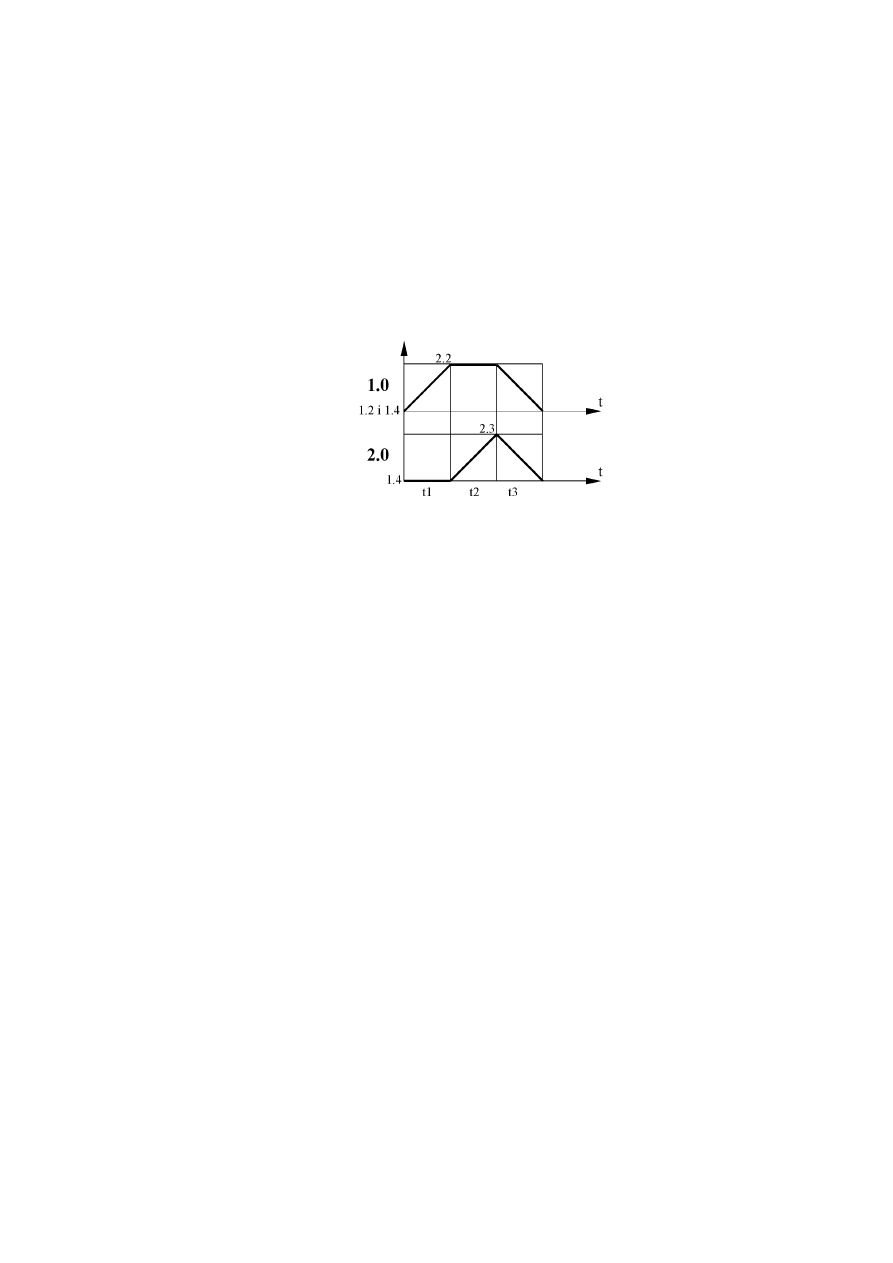
Zad.4. Narysuj schemat układu realizującego ruch tłoczysk siłowników według cyklogramu
z rysunku 6. Oznacz wszystkie elementy.
Rys. 6. Cyklogram pracy dwóch siłowników pneumatycznych
Wyszukiwarka
Podobne podstrony:
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
Politechnika Białostocka 07 Realizacja pneumatycznych układów sterowania z przekaźnikami czasowymi
Politechnika Białostocka 06 Realizacja pneumatycznych układów sterowania z licznikiem zdarzeń
Politechnika Białostocka 04 Realizacja pneumatycznych układów sterowania z zaworami realizującymi
Politechnika Białostocka 02 Podstawowe pneumatyczne układy sterowania ręcznego
Politechnika Białostocka 05 Oprogramowanie narzedziowe, konfiguracja i parametryzacja regulatora w
Sterowanie sekwencyjne układów hydraulicznych - sprawko, Uczelnia, Hydraulika i Pneumatyka
Politechnika Białostocka 13 Programowanie układów sekwencyjnych z wykorzystanie elementów czasowyc
Politechnika Białostocka 03 Układy sterowania umożliwiające zmianę parametrów ruchu tłoka
Synteza sekwencyjnych układów sterowania logicznego sprawozdanie
05--Praktyki politologia zalacznik 3 -dziennik-, Politechnika Białostocka, praktyki
Politechnika Białostocka 01 Zajęcia wprowadzające Zasady BHP Czytanie symboli graficznych elementó
więcej podobnych podstron