1
Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń
mechanicznych popularnie zwanych robotami. Jest dziedziną nowej technologii łączącej ze sobą różne gałęzie
nauk technicznych: automatykę, elektronikę, elektrotechnikę, mechanikę i informatykę,
Robotyka jako dyscyplina naukowa zajmuje się przede wszystkim:
- kinematyką robotów,
- dynamiką robotów,
- sterowaniem robotów,
- architekturą komputerowych układów sterowania,
- językami programowania,
- lokomocją,
- wizją,
- sensoryką,
- sztuczną inteligencją.
Robotem nazywa się urządzenie techniczne przeznaczone do realizacji funkcji manipulacyjnych i
lokomocyjnych, mające określony zasób energii, informacji i charakteryzujące się całkowitą lub częściową
autonomią w działaniu.
Robot mobilny to taki robot, który może dowolnie zmieniać swoje położenie w przestrzeni. Roboty tego
rodzaju mogą pływać, latać lub jeździć. Roboty mobilne mogą być robotami autonomicznymi tzn. takimi
których prawie nic nie ogranicza np. przewody sterujące bądź zasilające (a jedyne ograniczenia to np. ściany lub
przestrzeń w jakiej się znajdują itp.).
Mobilne roboty poruszające się po ziemi jest to klasa robotów, które mogą się przemieszczać za pomocą kół,
gąsienic lub kroczące.
Otoczenie robota jest to przestrzeń, w której robot jest usytuowany. Dla robotów stacjonarnych otoczenie
ogranicza się do przestrzeni roboczej.
Układ sterowania - zgodnie z teorią sterowania zadaniem układu sterowania jest określenie sygnału sterowania,
który należy podjąć wobec systemu (robota), aby otrzymać z góry założone właściwości. Sygnał sterujący
zostaje wygenerowany na podstawie posiadanych danych o tym systemie. W przypadku robota zadaniem układu
sterowania jest takie generowanie sygnałów sterujących aby układ osiągnął żądaną pozycję i orientację w
przestrzeni uwzględniając omijanie przeszkód, kontrolując przy tym podstawowe parametry kinematyczne i
dynamiczne. Ogólny schemat układu sterowania przedstawiono na rys.1
Rys.1 Schemat ogólny układu sterowania
Bardzo częstym określeniem związanym z robotami jest pojęcie generacji robotów, można wyróżnić III
generacje robotów. Opisując poszczególne generacje robotów należy skupić się na ich układzie sterowania oraz
sensoryce.
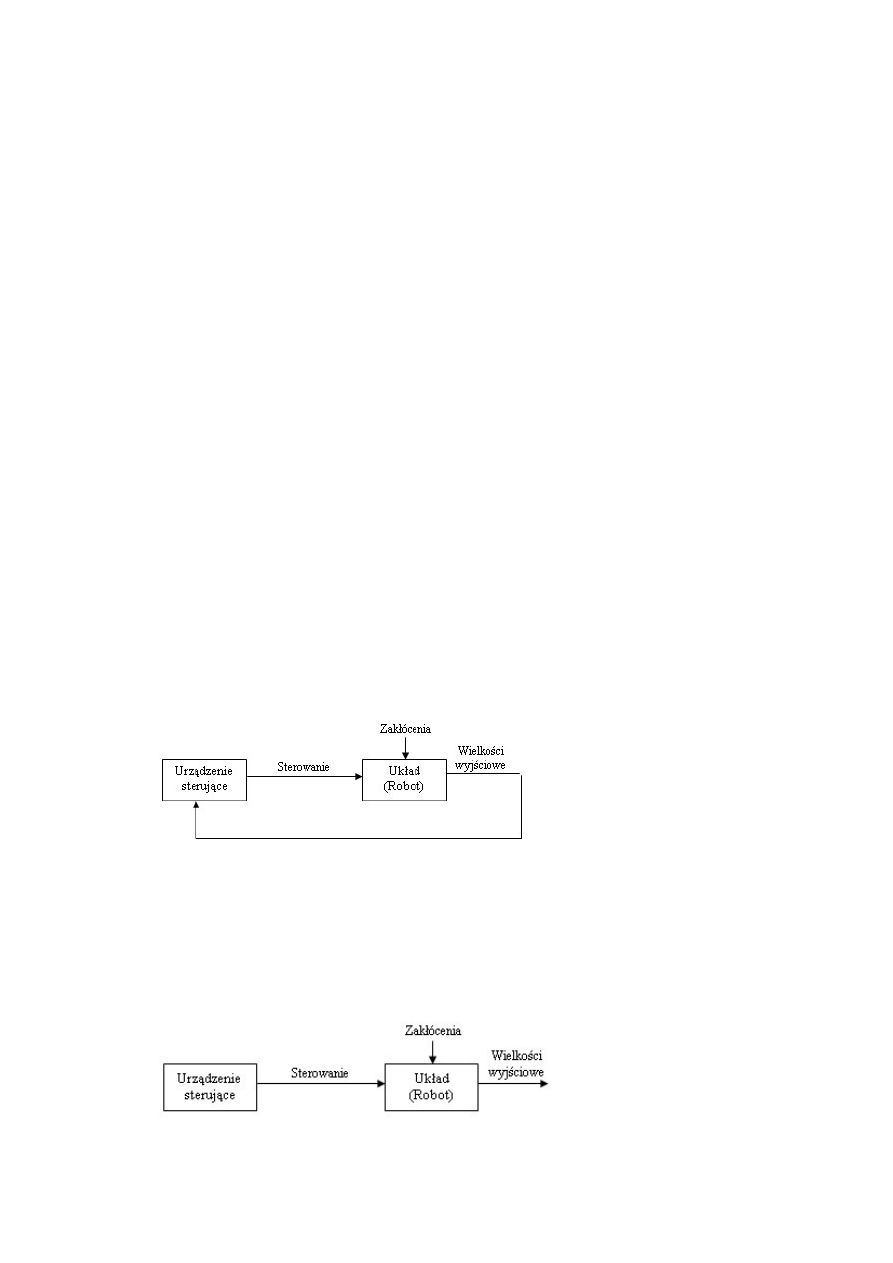
Roboty I generacji to roboty zaprogramowane najczęściej na określoną sekwencję czynności (istnieje
możliwość ich przeprogramowania). W robotach tej generacji stosowano przeważnie otwarty układ sterowania
tak więc robot charakteryzuje się całkowitym brakiem sprzężenia zwrotnego od stanu manipulowanego
przedmiotu. Schemat struktury robota I generacji pokazano na rys.2
Rys.2 Schemat otwartego układu sterowania dla I generacji robotów
2
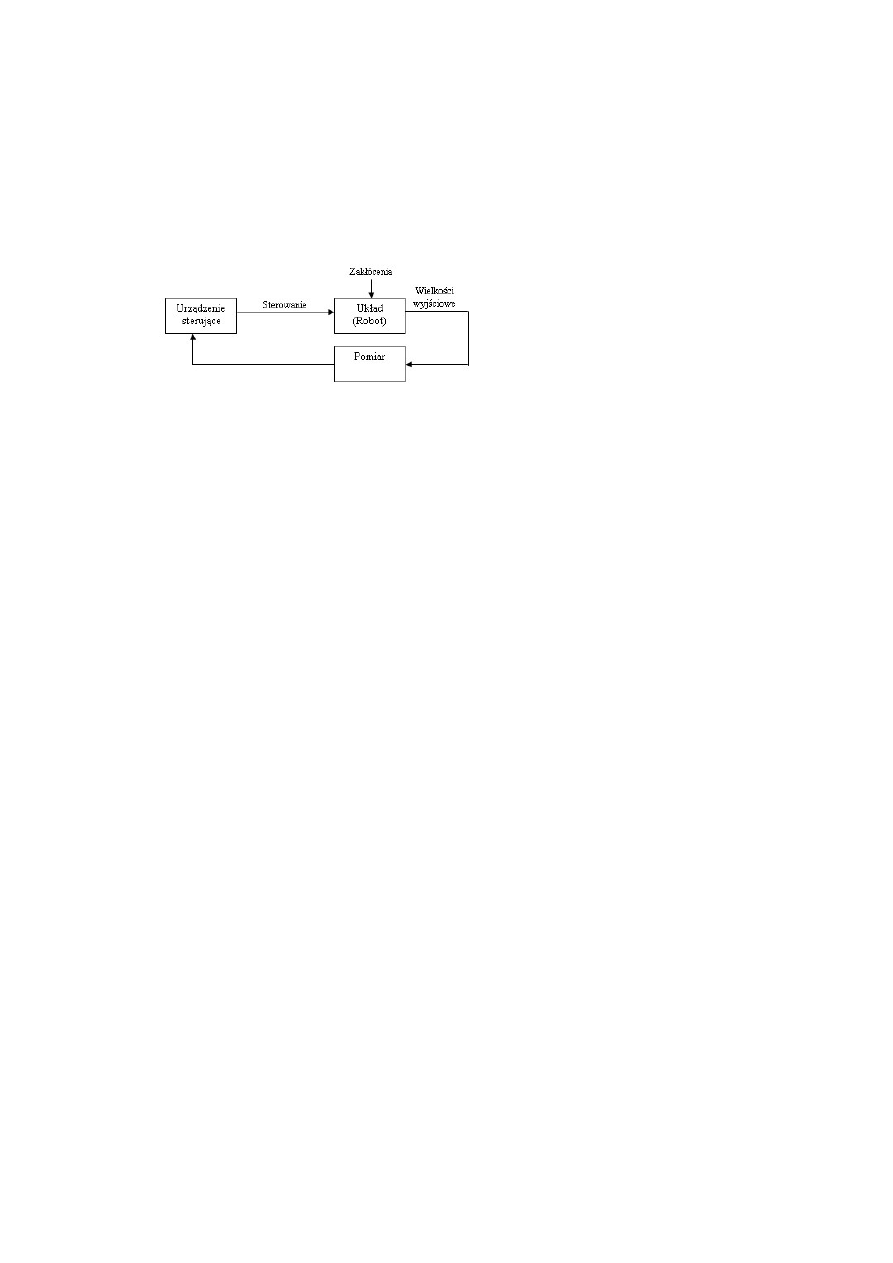
Roboty II generacji to roboty wyposażone w zamknięty układ sterowania oraz czujniki pozwalające dokonywać
pomiarów podstawowych parametrów stanu robota i otoczenia. Roboty II generacji powinny spełniają warunek
takiej taktyki przy kontakcie ze światem zewnętrznym, aby uzyskać optymalny efekt działania. Robot powinien
rozpoznawać żądany obiekt nawet wówczas, gdy przemieszcza się z innymi obiektami, następnie rozpoznać ten
obiekt bez względu na jego położenie i kształt geometryczny. Takie roboty realizują te wymagania za pomocą
zespołu czujników. Schemat blokowy robota II generacji przedstawiono na rys.3.
Rys.3 Schemat zamkniętego układu sterowania
Roboty III generacji to roboty wyposażone w zamknięty układ sterowania oraz czujniki pozwalające
dokonywać złożonych pomiarów parametrów stanu robota i otoczenia. Tak więc roboty te są wyposażone w
zdolności rozpoznawania złożonych kształtów i klasyfikacji złożonych sytuacji, a ich system sterowania
powinien posiadać zdolności adaptacyjne. Schemat układu sterowania dla robotów III generacji jest taki sam jak
dla robotów II generacji
Robot MA-VIN to produkt firmy HiTec. Jest to robot jeżdżący, o modułowej konstrukcji i bogatym zestawie
czujników pozwalającym wykorzystać go na wiele sposobów.
Ze względu na możliwości konstruowania oraz programowania ma bardzo duże walory edukacyjne. Zabawa
robotem rozwija umiejętności programowania oraz wiedzę z zakresu mikroelektroniki i robotyki. Robot może
służyć jako świetne narzędzie do nauki praktycznej.
Programowanie jest możliwe w języku graficznym (graficzne środowisko programowania) bądź w języku C
(WINAVR). Dołączone czujniki pozwalają łatwo stworzyć roboty podążające za linią, reagujące na światło i
dźwięk, poszukujące drogi w labiryncie. Zestaw nadaje się też do konstrukcji prostych robotów piłkarskich bądź
sumo.
Wiele elementów robota ma postać łatwych do podłączenia modułów. Do komunikacji między nimi
zastosowano standard I2C, co zwiększa uniwersalność zestawu i umożliwia jego dalszą rozbudowę (możliwe
jest dodawanie nowych modułów z nowymi czujnikami).
Połączenie robota z komputerem realizujemy za pomocą kabla USB. Po podłączeniu uruchamiamy program
MA-VIN za pomocą ikony programu, która znajduje się na pulpicie komputera. Po uruchomieniu powinno
pojawić się poniższe okno programu:
Pasek zadań
Na pasku zadań istnieją elementy za umożliwiające rozpoczęcie nowego projektu otwarcie zapisanego wcześniej
programu oraz zapisanie tworzonego programu. Znajdują się również ikony za pomocą których można
sprawdzić poprawność stworzonego programu i skompilować go do języka maszynowego zrozumiałego dla
robota.
Program tworzy się za pomocą modułów które znajdują się po lewej stronie okna programu. Moduły podzielone
są na wejściowe, logiczne oraz wyjściowe.
Tworzenie programów
programowanie może odbywać się na dwa sposoby. W języku graficznym oraz w języku C. Programowanie
graficzne polega na układaniu odpowiednich modułów , łączeniu ich oraz modyfikowaniu ich właściwości.
Widoczny na rysunku fragment okna przedstawia plansze na której należy ułożyć poszczególne moduły w celu
stworzenia programu. Aby przenieść moduł na planszę należy odpowiedni klocek modułu zaznaczyć LKM i
następnie „przenieść” go na formatkę programu. W celu usunięcia klocka z planszy należy zaznaczyć go PKM.
W celu połączenia dwóch modułów klikamy na wyjście pierwszego elementu i przeciągamy do wejścia
interesującego nas modułu.
Wyszukiwarka
Podobne podstrony:
Prelekcja do cw 11, Biologia, prelekcje
Instrukcja do ćw 11 Regulowanie nastaw regulatora na podstawie krytycznego nastawienia regulatora P
do cw 11
Biofizyka instrukcja do cw nr 11
Tematy do egzaminu 2009, automatyka, Ściąga
wstęp ćw 11, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy
ćw.11, Fizyka, Skrypt do Laborek
a MOJA SCIAGA DO Wojciechowsiego sciaga-sformułowanie pierws, PolitechnikaŁódzka, WEEIA-Automatyka i
mnja cw kolo sciaga do druku
Biofizyka instrukcja do cw nr 11
Biofizyka kontrolka do cw nr 11
ściaga cw 11
cw 11 atmel do zrobienia
MSIB Instrukcja do Cw Lab krystalizacja
Biofizyka kontrolka do cw nr 20
więcej podobnych podstron